Результат интеллектуальной деятельности: ЛЕТАТЕЛЬНЫЙ АППАРАТ
Вид РИД
Изобретение
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки различного назначения. Особенностью данного летательного аппарата является возможность его вертикального взлета и посадки. Технический результат - транспортное средство, способное добраться в любую труднодоступную точку планеты. Поставленная задача достигается за счет того, что в летательном аппарате используется система взлета, посадки и система управления движением, аналогов которой нет в мире.
Из научно технической литературы известен аппарат вертикального взлета и посадки заявка на изобретение 2017133738, от 27.09.2017 федеральной службы по интеллектуальной собственности (Роспатент).
Указанный в данной заявке летательный аппарат вертикального взлета и посадки, содержит корпус в виде полого цилиндра, расположенного вертикально и две горизонтальные платформы круглой формы. Силовую установку и кабину с системой управления летательным аппаратом на верхней платформе, закрытую обшивкой верхней части фюзеляжа, два соосных вертикально-осевых ротора с лопастями, прикрепленными к роторам через вертикальный, горизонтальный и осевой шарниры, верхний и нижний обтекатели по форме близкие к усеченной полусфере, неподвижно закрепленные по периметру роторов, нижнюю часть фюзеляжа под нижней платформой и телескопические опоры, с установленным автоматом перекоса.
Лопасти, прикрепленные по периметру к соосным вертикально-осевым роторам, обеспечивают создание аэродинамической силы, а установленный автомат перекоса позволяет изменять направление вектора аэродинамической силы.
Применение автомата перекоса между двух соосных вертикально-осевых роторов с лопастями позволит исключить несущий вертолетный винт и оставить свободным пространство над верхней частью фюзеляжа.
Недостатками указанного аппарата являются сложность в ходе его эксплуатации, габариты, вес, отсутствие системы безопасности, невозможность взлета и посадки на небольших площадках, во дворе дома, невозможность подлета аппарата в плотную к зданию, в том числе и к верхним этажам любых зданий, нерационально расположение винтов, что существенно снижает их эффективность.
В своем изобретении я предлагаю принципиально новый подход к устройству летательного аппарата, который будет взлетать и садиться вертикально, перемещаться вправо, влево за счет толкающих подъемных винтов, двигаться вперед, назад, останавливаться в воздухе за счет ходовых толкающих винтов. Все винты будут расположены в импеллерах, что увеличит их коэффициент полезного действия.
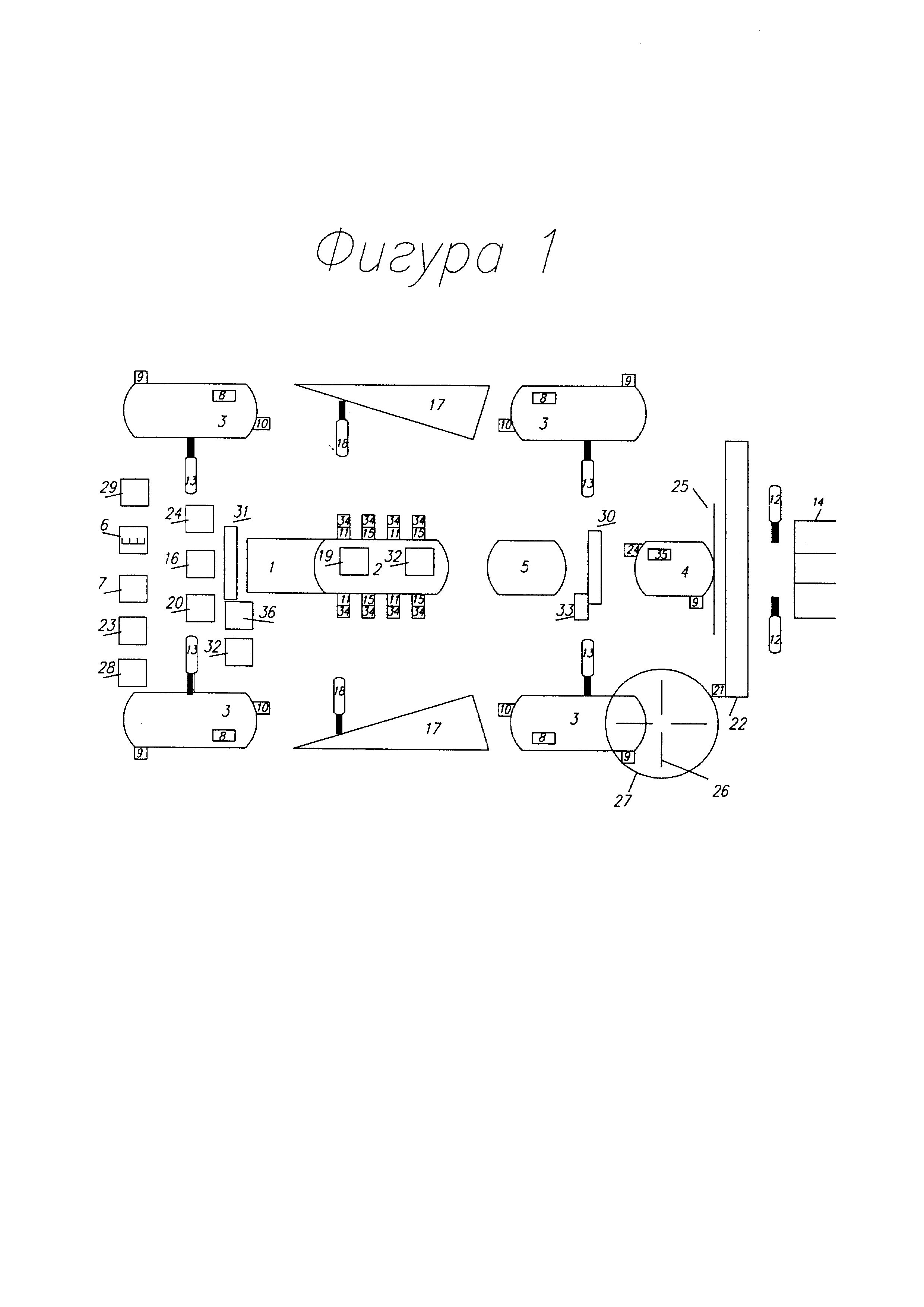
Для достижения поставленной цели на летательном аппарате установлены:
- четыре подъемных гидромеханические коробки передач (далее по тексту ГМКП) (фиг. 1 поз. 3),
- гидромоторы подъемных ГМКП (фиг. 1 поз. 10),
- подъемные толкающие винты (фиг. 1 поз. 26), расположенные на всех подъемных ГМКП
- гидромотор ходовой ГМКП (фиг. 1 поз. 24),
- ходовая гидромеханическая коробка передач (фиг. 1 поз. 4), вместо ходовой гидромеханической коробки передач на летательном аппарате, как разновидность, может устанавливаться редуктор ходового винта,
- ходовой толкающий винт (фиг. 1 поз. 25), в зависимости от модификации может устанавливаться несколько толкающих винтов, в том числе с использованием дополнительных ходовых ГМКП или редукторов,
- коробка отбора мощности (фиг. 1 поз. 2),
- бак для рабочей жидкости (фиг. 1 поз. 5),
- гидронасосы (фиг. 1 поз. 11), обеспечивающие работу гидромоторов (фиг. 1 поз. 10, поз. 24),
- гидронасосы (фиг. 1 поз. 15), обеспечивающие работу ГМКП (фиг. 1 поз. 3, поз. 4), гидроцилиндров (фиг. 1 поз. 12, 13, 18), системы управления гидравликой летательного аппарата,
- блок управления гидравликой руля направления движения и бокового хода (фиг. 1 поз. 7),
- блок управления переключением передач подъемных ГМКП (фиг. 1 поз. 6),
- блок управления стабилизаторами полета летательного аппарата (фиг. 1 поз. 23),
- блок управления регулируемым гидромеханическим перепускным клапаном управляющим работой гидромотора (фиг. 1 поз. 16) ходовой ГМКП,
- блок управления блоком привода руля высоты (фиг. 1 поз. 20),
- гидроцилиндры привода стабилизатора полета (фиг. 1 поз. 18),
- стабилизаторы полета летательного аппарата (фиг. 1 поз. 17),
- руль направления движения (фиг. 1 поз. 14),
- руль высоты (фиг. 1 поз. 22).
Все гидроцилиндры системы управления полетом можно заменять электромеханическим приводом. Применение электромеханических приводов является вторым вариантом комплектации системы управления полетом летательного аппарата.
Сущность изобретения заключается в следующем.
Крутящий момент от двигателя (фиг. 1 поз. 1) передается на коробку отбора мощности (фиг. 1 поз. 2), которая соединена с двигателем. Коробка отбора мощности (фиг. 1 поз. 2) передает крутящий момент на гидронасосы (фиг. 1 поз. 11 и 15), расположенные на корпусе коробки отбора мощности (фиг. 1 поз. 2). Гидронасосы (фиг. 1 поз. 11) откачивают рабочую жидкость из бака для рабочей жидкости системы гидравлики летательного аппарата (фиг. 1 поз. 5) и подают ее на блок регулируемых перепускных клапанов управления работой гидромоторов (фиг. 1 поз. 32), расположенных на подъемных ГМКП. Когда блок регулируемых перепускных клапанов управления работой гидромоторов (фиг. 1 поз. 32) находится в выключенном состоянии, то рабочая жидкость через перепускной клапан, расположенный на гидронасосах, возвращается в бак для рабочей жидкости гидросистемы (фиг. 1 поз. 5). При включенном блоке регулируемых перепускных клапанов управления работой гидромоторов (фиг. 1 поз. 32) рабочая жидкость под давлением по каналам высокого давления подается на гидромоторы (фиг. 1 поз. 10), расположенные на первичном валу ГМКП (фиг. 1 поз. 3). Гидромоторы (фиг. 1 поз. 10) передают крутящий момент на первичный вал ГМКП (фиг. 1 поз. 3). Рабочая жидкость из гидромоторов (фиг. 1 поз. 10) возвращается в бак для рабочей жидкости системы гидравлики (фиг. 1 поз. 5).
С гидронасосов (фиг. 1 поз. 15) рабочая жидкость по каналам высокого давления подается на электромеханический гидрораспределитель, управляющий переключением передач подъемных ГМКП (фиг. 1 поз. 8).
Когда блок управления переключения передач подъемных ГМКП (фиг. 1 поз. 6) находится в выключенном состоянии, рабочая жидкость через обратный клапан электромеханического гидрораспределителя (фиг. 1 поз. 8), будет возвращаться обратно в бак для рабочей жидкости системы гидравлики.
После включения выбранной передачи, на блоке управления переключения передач подъемных ГМКП (фиг. 1 поз. 6), рабочая жидкость через электромеханический гидрораспределитель будет подаваться в корпус выбранной передачи ГМКП (фиг. 1 поз. 3). Гидромотор (фиг. 1 поз. 10) вращает первичный вал ГМКП (фиг. 1 поз. 3), поэтому крутящий момент, после включения передачи, передастся на подъемный толкающий винт (фиг. 1 поз. 26), расположенный на выходном валу ГМКП. Подъемный толкающий винт (фиг. 1 поз. 26) для большей эффективности расположен в импеллере (фиг. 1 поз. 27). Направленный поток воздуха от подъемных толкающих винтов (фиг. 1 поз. 26) заставит летательный аппарат подниматься в воздух. Рабочая жидкость из ГМКП (фиг. 1 поз. 3) откачивается маслооткачивающим насосом (фиг 1 поз. 9).
Боковое движение летательного аппарата осуществляется за счет изменения угла наклона подъемных ГМКП (фиг. 1 поз. 3), на которых расположены подъемные толкающие винты (фиг. 1 поз. 26), относительно продольной оси летательного аппарата. Боковое движение происходит следующим образом. Поворачивая центральный вал блока управления гидравликой руля направления движения и бокового хода (фиг. 1 поз. 7) влево, мы подаем рабочую жидкость на гидроцилиндры управления бокового хода (фиг. 1 поз. 13), расположенные по правому борту летательного аппарата, ГМКП, которые находятся по правому борту летательного аппарата отклоняются вправо от продольной оси летательного аппарата, в результате поток воздуха создаваемый винтами, расположенными на этих ГМКП, заставляет летательный аппарат двигаться влево. Поворачивая центральный вал блока управления гидравликой руля направления движения и бокового хода (фиг. 1 поз. 7) вправо, мы подаем рабочую жидкость на гидроцилиндры управления бокового хода(фиг. 1 поз. 13), расположенные по левому борту летательного аппарата. ГМКП, которые находятся по левому борту летательного аппарата отклоняются влево от продольной оси летательного аппарата, в результате поток воздуха, создаваемый винтами, расположенными на этих ГМКП, заставляет летательный аппарат двигаться вправо. Боковое движение может осуществляться за счет изменения скорости вращения подъемных толкающих винтов. За счет изменения скорости вращения винтов боковое движение происходит следующим образом. Увеличивая скорость вращения винтов, расположенных по правому борту, мы заставляем летательный аппарат двигаться влево и наоборот, увеличивая скорость вращения винтов, расположенных по левому борту, мы заставляем летательный аппарат двигаться вправо. В летательном аппарате будет использоваться комбинированный вариант бокового движения, включающий в себя оба выше указанных варианта.
Для движения летательного аппарата вперед-назад и плавного подвода летательного аппарата к нужной точке, в летательном аппарате будет использоваться изменение скорости вращения подъемных толкающих винтов. Увеличивая скорость вращения подъемных толкающих винтов, расположенных в корме летательного аппарата, мы заставляем летательный аппарат неподвижно зависать на месте, если он двигался назад, или двигаться вперед, если он зависал на одном месте. И наоборот, увеличивая скорость вращения подъемных толкающих винтов, расположенных в носовой части летательного аппарата, мы заставляем летательный аппарат неподвижно зависать на месте, если он двигался в перед, или двигаться назад, если он зависал на одном месте. Движение летательного аппарата вперед на маршевых скоростях осуществляется за счет потока воздуха создаваемого ходовым толкающим винтом (фиг. 1 поз. 25), расположенным в корме летательного аппарата. Вращаясь, ходовой толкающий винт (фиг. 1 поз. 25) создает поток воздуха, направленный от летательного аппарата, этот поток заставляет летательный аппарат двигаться вперед. Передача крутящего момента на ходовой толкающий винт происходит следующим образом. Переводя блок управления клапаном управляющего работой гидромотора, (фиг. 1 поз. 16), расположенного на ходовой ГМКП, в рабочее положение, мы подаем рабочую жидкость через регулируемый электромеханический перепускной клапан (фиг. 1 поз. 19), управляющий работой гидромотора, на гидромотор, расположенный на ходовой гидромеханической коробке передач (фиг. 1 поз. 24), который расположен на первичном валу ходовой гидромеханической коробки передач (фиг. 1 поз. 4). В результате первичный вал ходовой гидромеханической коробки передач (фиг. 1 поз. 4) начинает вращаться. После выбора передачи на блоке управления электромеханическим гидрораспределителем (фиг. 1 поз. 36) рабочая жидкость подается через электромеханический гидрораспределитель (фиг. 1 поз. 35) в корпус выбранной передачи ходовой гидромеханической коробки передач (фиг. 1 поз. 4), в результате крутящий момент передается на ходовой толкающий винт (фиг. 1 поз. 25). В летательном аппарате будет использоваться комбинированный способ перемещения, включающий в себя способ изменения скорости вращения подъемных винтов и ходовых толкающих винтов одновременно.
Поворот летательного аппарата осуществляется за счет изменения положения рулей, направления движения летательного аппарата (фиг. 1 поз. 14), которые расположены за ходовым толкающим винтом (фиг. 1 поз. 25), и находятся в потоке воздуха создаваемого ходовым толкающим винтом (фиг. 1 поз. 25). Поворачивая руль направления движения летательного аппарата (фиг. 1 поз. 14) вправо, мы направляем поток воздуха вправо, в результате летательный аппарат поворачивает вправо. Поворачивая руль направления движения летательного аппарата (фиг. 1 поз. 14) влево, мы направляем поток воздуха влево, в результате летательный аппарат поворачивает влево. Поворот летательного аппарата можно производить за счет изменения скорости вращения подъемных толкающих винтов. Увеличивая скорость вращения подъемных толкающих винтов, расположенных впереди по левому борту и сзади по правому борту летательного аппарата, мы повернем летательный аппарат вправо. Увеличивая скорость вращения подъемных толкающих винтов, расположенных впереди по правому борту и сзади по левому борту летательного аппарата, мы повернем летательный аппарат влево. В летательном аппарате будет использоваться комбинированный способ поворота, включающий оба выше указанных способа.
Летательный аппарат в воздухе останавливается в результате создания рулями направления движения летательного аппарата (фиг. 1 поз. 14) сплошной преграды на пути воздушного потока, создаваемого ходовым толкающим винтом (фиг. 1 поз. 25). Работает система торможения следующим образом. Переводя блок управления остановкой летательного аппарата (фиг. 1 поз. 28) в рабочее положение, мы подаем команду на гидроцилиндры привода руля направления движения и торможения летательного аппарата (фиг. 1 поз. 12), в результате чего рули направления движения летательного аппарата складываются к центру друг на дуга создавая сплошную преграду на пути воздушного потока. Поток воздуха, отражаясь от преграды, направляется по ходу движения летательного аппарата, заставляя летательный аппарат останавливаться. Останавливать летательный аппарат в воздухе можно за счет изменения скорости вращения подъемных толкающих винтов, увеличивая скорость вращения передних подъемных толкающих винтов, или уменьшая скорость вращения задних подъемных толкающих винтов, мы заставляем плавно останавливаться летательный аппарат. В летательном аппарате будет использоваться комбинированный вариант остановки летательного аппарата с использованием изменения скорости вращения подъемных толкающих винтов и использованием рулей направления движения летательного аппарата одновременно. Для устойчивости полета на маршевых скоростях на летательном аппарате установлены два стабилизатора полета летательного аппарата (фиг. 1 поз. 17), которые имеют вид треугольного крыла, расположены под летательным аппаратом и выдвигаются из под летательного аппарата, при необходимости, следующим образом. Переводя блок управления стабилизаторами полета (фиг. 1 поз. 23) в рабочее положение мы подаем рабочую жидкость на гидроцилиндры привода стабилизатора (фиг. 1 поз. 18), в результате штоки цилиндров выдвигаются и стабилизаторы полета (фиг. 1 поз. 17) выходят из под летательного аппарата.
На летательном аппарате будет установлен автопилот, блок дистанционного управления, система стабилизации полета относительно горизонта и вертикали. В зависимости от модификации летательного аппарата автопилот, блок дистанционного управления и систему стабилизации полета относительно горизонта и вертикали можно использовать отдельно или комбинировать в любом варианте.
Вся рабочая жидкость системы управления летательным аппаратом проходит через радиатор охлаждения рабочей жидкости гидросистемы (фиг. 1 поз. 30). На летательном аппарате установлен радиатор системы охлаждения двигателя (фиг. 1 поз. 31). В летательном аппарате установлена система контроля утечки рабочей жидкости из системы гидравлики.
Система контроля состоит из блока аварийного отключения подачи рабочей жидкости (фиг. 1 поз. 29), датчиков контроля давления в системе гидравлики (фиг. 1 поз. 33), перепускных клапанов системы аварийного отключения подачи рабочей жидкости (фиг. 1 поз. 34). Эта система работает следующим образом. Рабочая жидкость подается в систему гидравлики под определенным давлением, в случае утечки рабочей жидкости из системы гидравлики, давление в системе падает, датчики контроля давления в системе гидравлики (фиг. 1 поз. 33) подают сигнал на блок аварийного отключения подачи рабочей жидкости (фиг. 1 поз. 29), этот блок автоматически включает перепускной клапан системы аварийного отключения подачи рабочей жидкости (фиг. 1 поз. 34), который подает рабочую жидкость на аварийный участок гидросистемы. В результате рабочая жидкость с гидронасоса возвращается в бак для рабочей жидкости гидросистемы (фиг. 1 поз. 5). Для приземления в летательном аппарате, в зависимости от модификации, будут использоваться телескопические опоры либо выдвижные шасси. Данное изобретение относится к авиации, может быть использовано для перевозки людей, грузов и позволяет создать принципиально новый вид транспорта, который может широко применяться в народном хозяйстве.
На фигуре 1 изображено:
1. Двигатель внутреннего сгорания.
2. Коробка отбора мощности.
3. Гидромеханическая коробка передач подъемная.
4. Ходовая гидромеханическая коробка передач.
5. Бак для рабочей жидкости гидросистемы.
6. Блок управления переключения передач подъемных гидромеханических коробок передач.
7. Блок управления гидравликой руля направления движения и бокового хода.
8. Электромеханический гидрораспределитель с перепускным клапаном для управления переключением передач подъемных гидромеханических коробок передач.
9. Масло откачивающий насос.
10. Гидромотор подъемных гидромеханических коробок передач.
11. Гидронасосы обеспечивающие работу гидромоторов.
12. Гидроцилиндры привода руля направления движения и торможения.
13. Гидроцилиндры управления бокового хода.
14. Руль направления движения.
15. Гидронасосы обеспечивающие работу гидромеханических коробок передач, гидроцилиндров, системы управления гидравликой.
16. Блок управления регулируемым гидромеханическим перепускным клапаном управляющим работой гидромотора ходовой ГМКП.
17. Стабилизатор полета.
18. Гидроцилиндры привода стабилизатора.
19. Регулируемый электромеханический перепускной клапан управляющий работой гидромотора ходовой ГМКП.
20. Блок управления блоком привода руля высоты.
21. Блок привода руля высоты.
22. Руль высоты.
23. Блок управления стабилизаторами полета.
24. Гидромотор ходовой гидромеханической коробки передач.
25. Ходовой толкающий винт.
26. Подъемный толкающий винт.
27. Импеллер.
28. Блок управления остановкой летательного аппарата.
29. Блок аварийного отключения подачи рабочей жидкости.
30. Радиатор охлаждения рабочей жидкости гидро системы.
31. Радиатор системы охлаждения двигателя.
32. Блок регулируемых перепускных клапанов управления работой гидромоторов расположенных на подъемных гидро механических коробках передач.
33. Датчики контроля давления в системе гидравлики.
34. Перепускной клапан системы аварийного отключения подачи рабочей жидкости.
35. Электромеханический гидрораспределитель с перепускным клапаном управляющий переключением передач ходовой гидромеханической коробки передач.
36. Блок управления переключения электромеханического гидрораспределителя с перепускным клапаном, управляющего переключением передач, толкающей гидромеханической коробки передач.
Летательный аппарат, состоящий из двигателя, толкающих подъемных винтов, системы привода винтов, системы управления, салона и корпуса, источника крутящего момента и агрегатов, передающих крутящий момент, крутящий момент от источника крутящего момента передается на толкающие подъемные винты, которые обеспечивают возможность вертикального взлета и посадки, а также перемещения в выбранном направлении, отличающийся тем, что в летательном аппарате используется для привода и управления скоростью вращения и наклоном толкающих несущих винтов и управления скоростью вращения ходового винта гидромеханическая система, которая содержит четыре гидромеханические коробки передач (ГМКП), гидромоторы, коробку отбора мощности, бак для рабочей жидкости, гидронасосы, блок управления электромеханическим гидрораспределителем переключения передач ГМКП, гидромеханические блоки управления движением.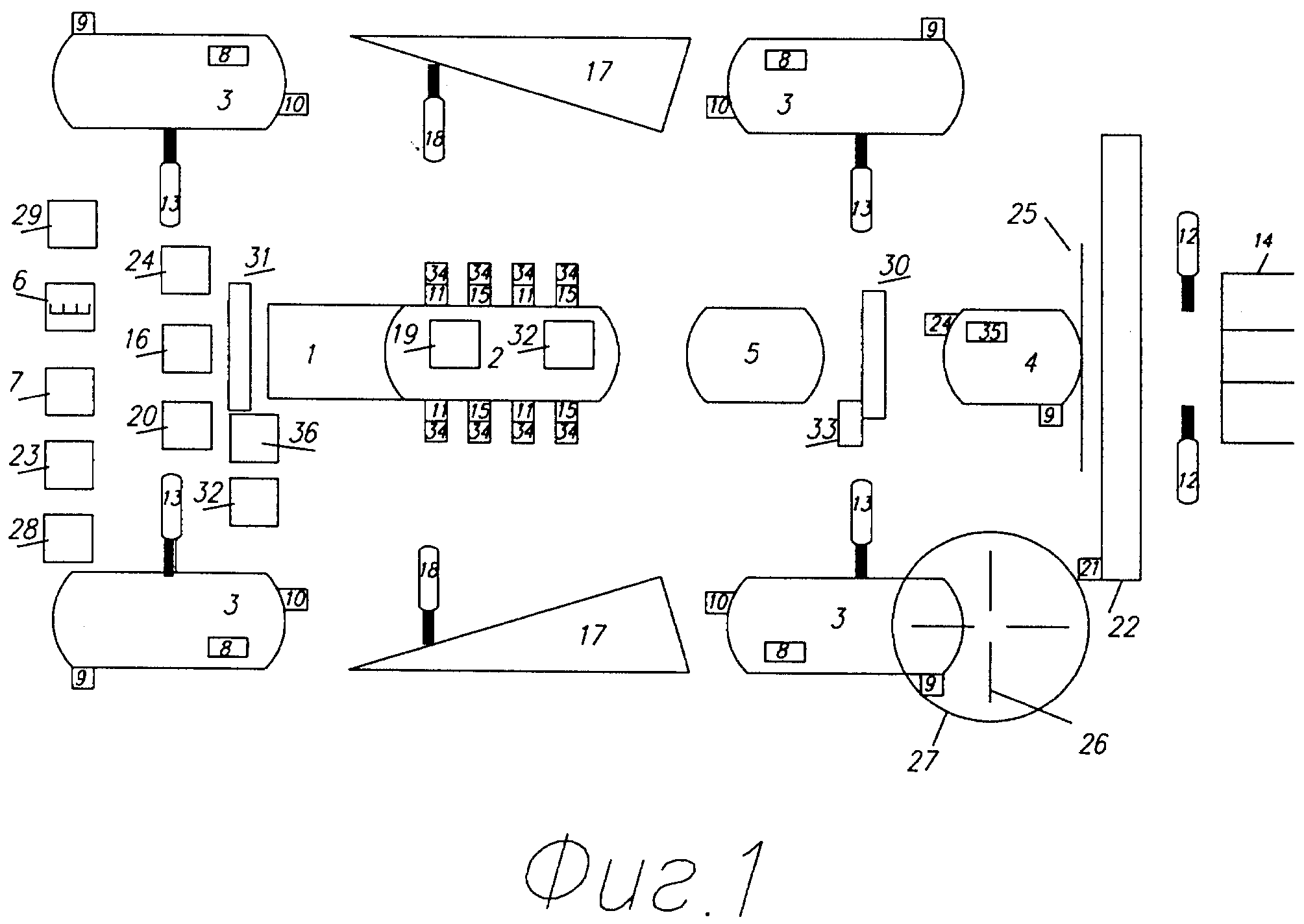
Гидромеханическая коробка передач
Летательный аппарат
Коробка отбора мощности
Система управления полетом летательного аппарата
Блок регулируемых перепускных клапанов
Гидромеханическая коробка передач
Летательный аппарат
Коробка отбора мощности
Система управления полетом летательного аппарата
Блок регулируемых перепускных клапанов

