Результат интеллектуальной деятельности: Компьютерная система дистанционного управления навигационными комплексами для автоматизированного мониторинга окружающей среды в условиях Арктики
Вид РИД
Изобретение
Предлагаемая система относится к области автоматизированного мониторинга окружающей среды в условиях Арктики, а именно состояния атмосферы и льда с одновременным определением координат собственного местоположения навигационных комплексов и передачей полученной информации по радиоканалам, и может быть использована в качестве средства мониторинга окружающей среды в зоне движения льда для безопасной проводки судов по северному морскому пути и обеспечения безопасности объектов нефтегазопромысловой и гидротехнической инфраструктуры на шельфе и в прибрежной зоне в ледовитых морях и в условиях ледяного покрова, в том числе и дрейфующего.
Известны системы мониторинга состояния льда и окружающей среды (авт. свид. СССР №№1.151.107, 1.341.594, 1.376.769, 1.788.487, 1.840.717; патенты РФ №№2.080.620, 2.137.153, 2.196.347, 2.251.128, 2.436.134, 2.449.326, 2.486.471, 2.487.365, 2.500.031, 2.583.234, 2.681.671; патенты США №№3.449.950, 4.231.039, 4.527.160, 4.608.568, 7.969.827; патенты Великобритании №№1.494.582, 1.499.388, 2.122.834; патенты Франции №№2.384.218, 2.592.959; патенты Германии №№2.800.074, 2.802.918; Ваулин Ю.В. и др. Навигационный комплекс автономного подводного робота и особенности его применения в условиях Арктики. Навигация, управление и связь, 2008, №1 (5), с. 24-31 и другие).
Из известных систем наиболее близкой к предлагаемой является «Компьютерная система дистанционного управления навигационными комплексами для автоматизированного мониторинга окружающей среды в условиях Арктики» (патент РФ №2.681.671, G01C 21/00, 2017), которая и выбрана в качестве прототипа.
Указанная система обеспечивает оперативный обмен дискретной информацией между диспетчерским пунктом и навигационными комплексами. Это достигается за счет дуплексной радиосвязи с использованием сложных сигналов с фазовой манипуляцией, компьютеров и космических аппаратов спутниковой системы связи в качестве ретрансляторов.
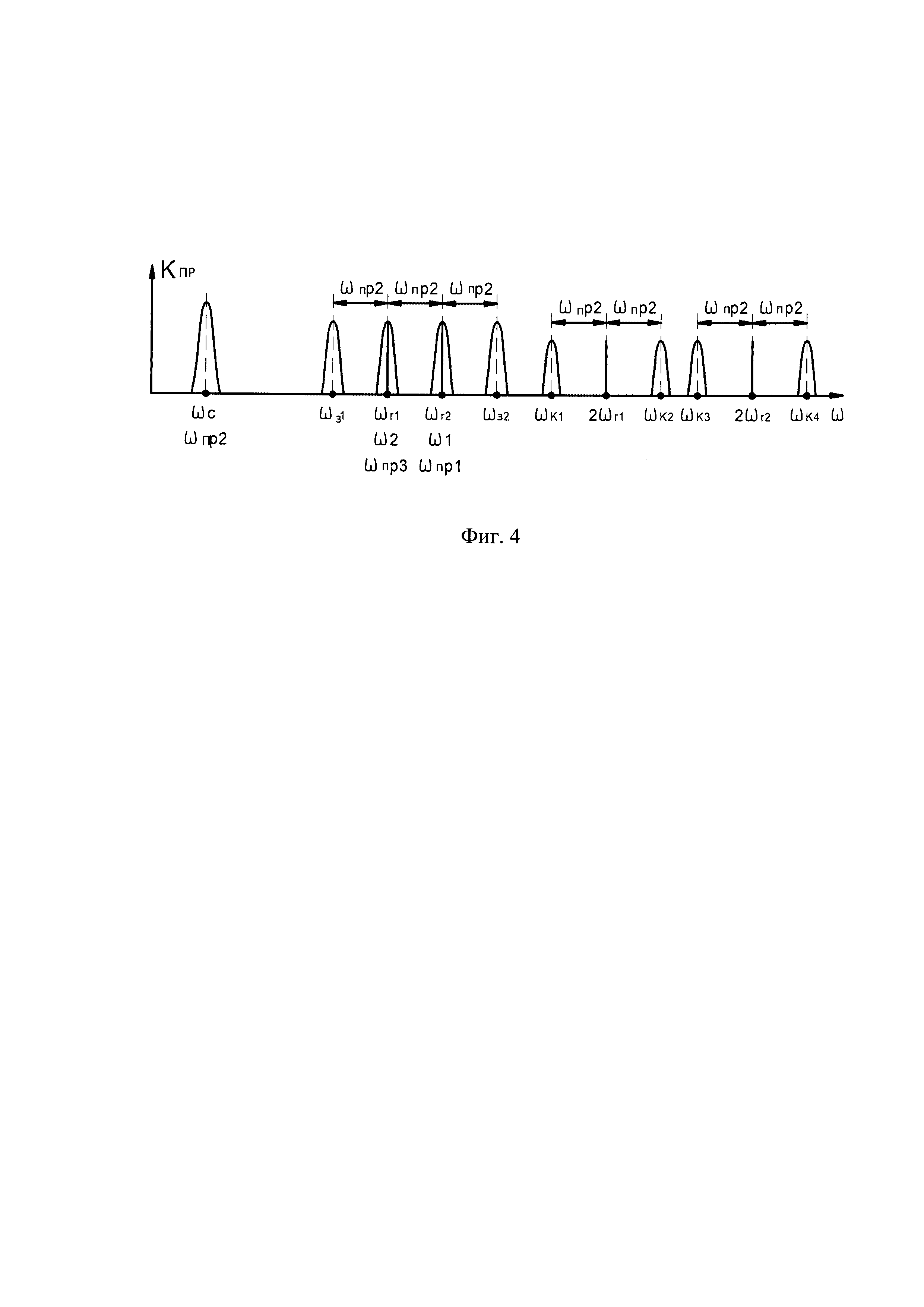
В состав известной системы входят супергетеродинные приемники, в которых одно и то же значение второй промежуточной частоты ωпр2 может быть получено в результате приема сигналов на следующих частотах: ω1, ω2, ωз1, ωз2, то есть
ωпр2=ω1-ωг1, ωпр2=ωг1-ωз1,
ωпр2=ωг2-ω2, ωпр2=ωз2-ωг2.
Следовательно, если частоты настройки ω1 и ω2 принять за основные каналы приема, то наряду с ними существуют и зеркальные каналы приема, частоты ωз1 и ωз2 которых расположены симметрично (зеркально) относительно частот ωг1 и ωг2 первого и второго гетеродинов (фиг. 4). Преобразование по зеркальным каналам приема происходит с тем же коэффициентом преобразования Кпр, что и по основным каналам. Поэтому зеркальные каналы приема наиболее существенно влияют на избирательность и помехоустойчивость супергетеродинных приемников.
Кроме зеркальных, существуют и другие дополнительные (комбинационные) каналы приема.
В общем виде любой комбинационный канал приема имеет место при выполнении условий:
ωпр2=| ± mωкi ± nωг1 |,
ωпр2=| ± mωкj ± nωг2 |,
где ωкi, ωкj - частоты i-го и j-го комбинационных каналов приема;
m, n, i, j - целые положительные числа.
Наиболее вредными комбинационными каналами приема являются каналы, образующиеся при взаимодействии первой гармоники частоты сигнала с гармониками частот гетеродинов малого порядка (второй, третьей), так как чувствительность приемников по этим каналам близка к чувствительности основных каналов.
Так, четырем комбинационным каналам приема при m=1 и n=2 соответствуют частоты:
ωк1=2ωг1-ωпр2, ωк2=2ωг1+ωпр2,
ωк3=2ωг2-ωпр2, ωк4=2ωг2+ωпр2,
где 2ωг1, 2ωг2 - вторые гармоники частот первого и второго гетеродинов.
Наличие ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам, приводит к снижению избирательности, помехоустойчивости и достоверности дуплексной радиосвязи между диспетчерским пунктом и навигационными комплексами.
Технической задачей изобретения является повышение избирательности, помехоустойчивости и достоверности дуплексной радиосвязи между диспетчерским пунктом и навигационными комплексами путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам.
Поставленная задача решается тем, что компьютерная система дистанционного управления навигационными комплексами для автоматизированного мониторинга окружающей среды в условиях Арктики, содержащая, в соответствии с ближайшим аналогом, не менее трех навигационных комплексов, каждый из которых характеризуется наличием надводной и подводной секциями, соединенными кабелем, при этом надводная часть содержит блок управления, блок определения координат по системе спутниковой навигации, блок определения состояния атмосферы, подключенные к приемопередающему устройству, а подводная часть содержит подводный навигационный маяк, управляющие входы блока определения координат по системе спутниковой навигации, блока определения толщины ледового покрова, блока определения состояния атмосферы и подводного навигационного маяка соединены с соответствующими выходами блока управления, приемопередающее устройство, установленное на диспетчерском пункте, и космические аппараты спутниковой системы связи, при этом каждое приемопередающее устройство выполнено в виде последовательно подключенных к выходу блока управления компьютера задающего генератора, фазового манипулятора, второй вход которого через формирователь модулирующего кода соединен со вторым выходом компьютера, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, дуплексера, вход-выход которого связан с приемопередающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с выходом второго гетеродина и усилителя второй промежуточной частоты, последовательно включенных перемножителя, второй вход которого соединен с выходом первого гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с выходом второго гетеродина, а выход подключен к компьютеру, частоты ωr1 и ωr2 гетеродинов разнесены на значение второй промежуточной частоты
ωг2-ωг1=ωпр2,
приемопередающее устройство диспетчерского пункта излучает сложные сигналы с фазовой манипуляцией на частоте
ω1=ωпр1=ωг2,
где ωпр1 - первая промежуточная частота, а принимает на частоте
ω2=ωпр3=ωг1,
где ωпр3 - третья промежуточная частота, а приемопередающие устройства навигационных комплексов, наоборот, излучают сложные сигналы с фазовой манипуляцией на частоте ω2, а принимают - на частоте ω1, космические аппараты спутниковой системы связи ретранслируют сложные сигналы с фазовой манипуляцией на частотах ω1 и ω2 с сохранением фазовых соотношений, отличается от ближайшего аналога тем, что каждое приемопередающее устройство снабжено колебательным контуром, узкополосным фильтром, амплитудным детектором, пороговым блоком и ключом, причем к выходу второго усилителя мощности последовательно подключены колебательный контур, второй вход которого соединен с выходом первого гетеродина, узкополосный фильтр, амплитудный детектор, пороговый блок и ключ, второй вход которого соединен с выходом усилителя второй промежуточной частоты, а выход подключен к первому входу перемножителя.
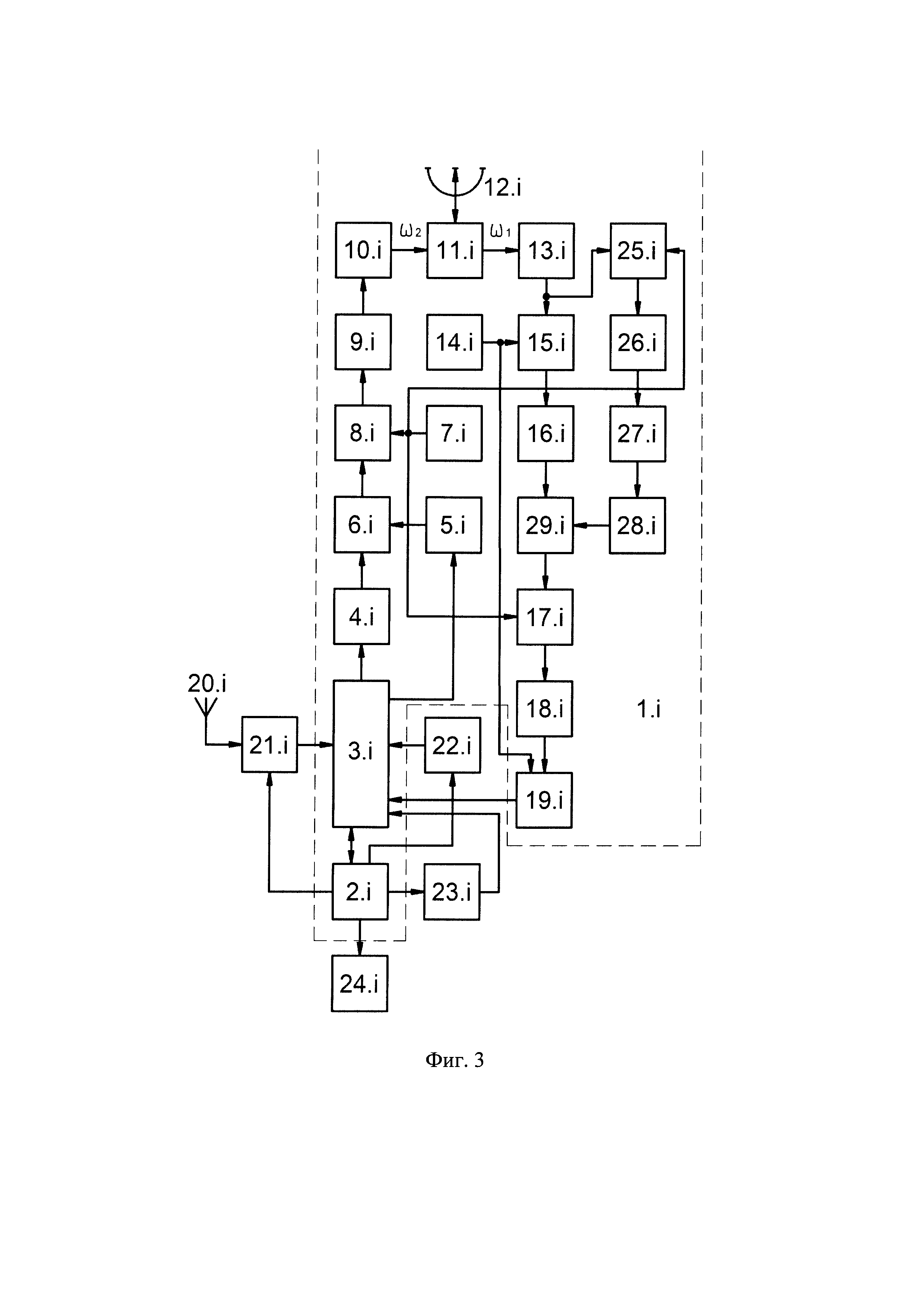
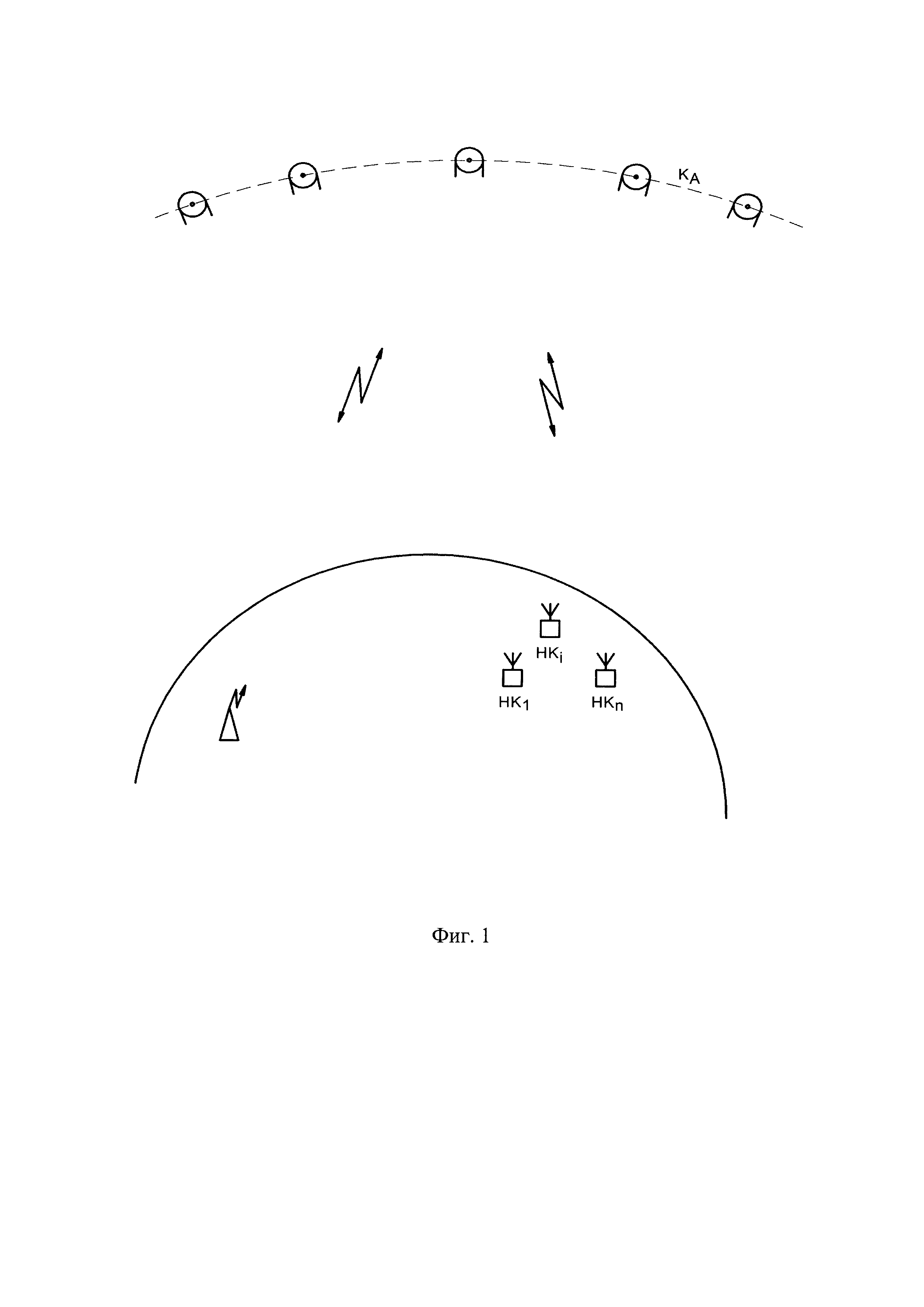
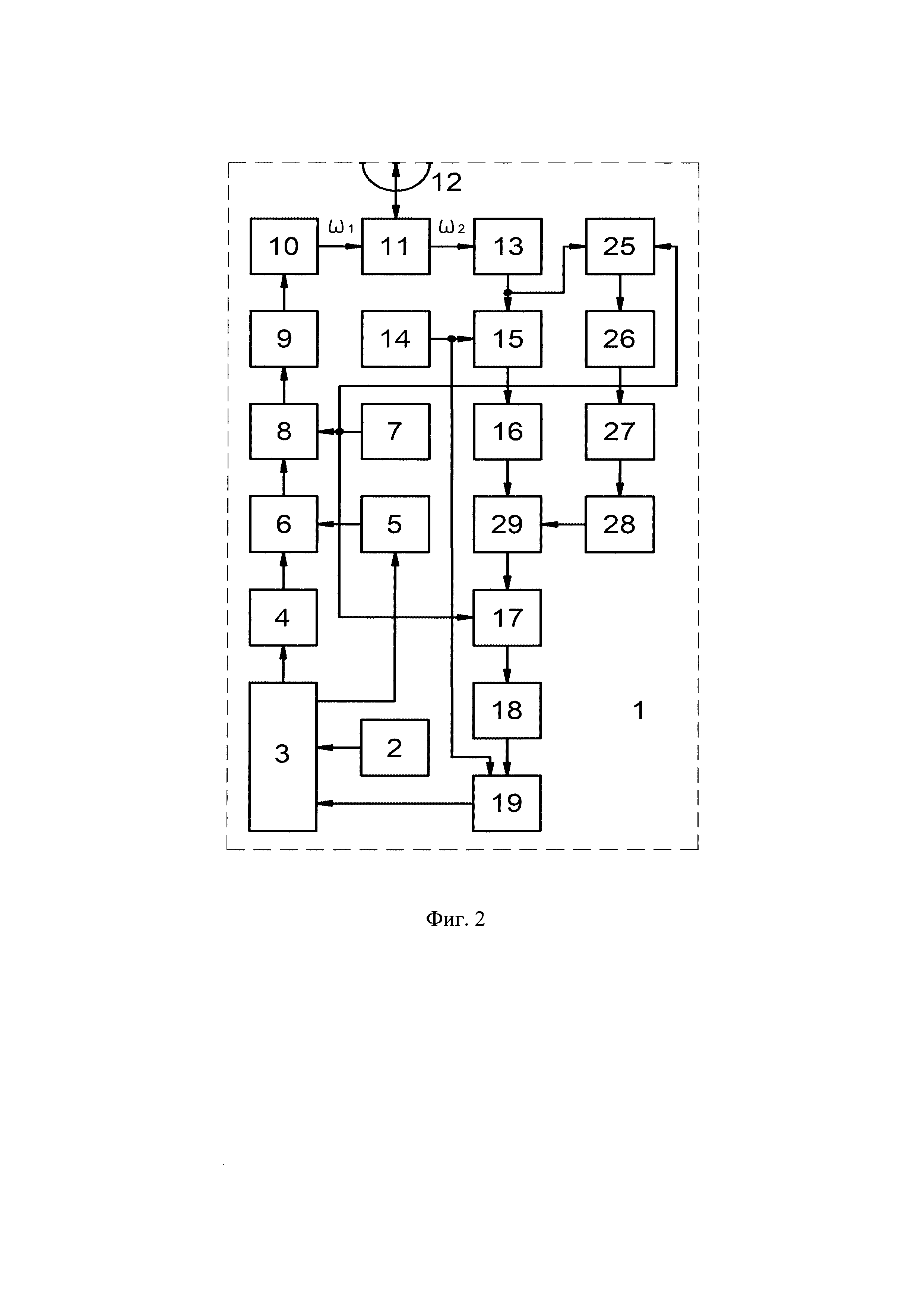
Геометрическая схема расположения диспетчерского пункта (ДП), навигационных комплексов (HКi, I=1, 2, …, n) и космических аппаратов (КА) спутниковой системы связи изображена на фиг. 1. Структурная схема приемопередающего устройства 1, установленного на диспетчерском пункте ДП, представлена на фиг. 2. Структурная схема приемопередающего устройства 1.i, установленного на i-ом навигационном комплексе, представлена на фиг. 3. Частотная диаграмма, иллюстрирующая преобразование сигналов по частоте, изображена на фиг. 4.
Каждое приемопередающее устройство 1 (1.i) выполнено в виде последовательно включенных блока 2 (2.i) управления, компьютера 3 (3.i), задающего генератора 4 (4.i), фазового манипулятора 6 (6.i), второй вход которого через формирователь 5 (5.i) модулирующего кода соединен с вторым выходом компьютера 3 (3.i), первого смесителя 8 (8.i), второй вход которого соединен с выходом первого гетеродина 7 (7.i), усилителя 9 (9.i) первой промежуточной частоты, первого усилителя 10 (10.i) мощности, дуплексера 11 (11.i), вход-выход которого связан с приемопередающей антенной 12 (12.i), второго усилителя 13 (13.i) мощности, второго смесителя 15 (15.i), второй вход которого соединен с выходом второго гетеродина 14 (14.i), усилителя 16 (16.i) второй промежуточной частоты, ключа 29 (29.i), перемножителя 17 (17.i), второй вход которого соединен с выходом первого гетеродина 7 (7.i), полосового фильтра 18 (18.i) и фазового детектора 19 (19.i), второй вход которого соединен с выходом второго гетеродина 14 (14.i), а выход подключен к второму входу компьютера 3 (3.i). К выходу второго усилителя 13 (13.i) мощности последовательно подключены колебательный контур 25 (25.i), второй вход которого соединен с выходом первого гетеродина 7 (7.i), узкополосный фильтр 26 (26.i), амплитудный детектор 27 (27.i) и пороговый блок 28 (28.i), выход которого соединен с вторым входом ключа 29 (29.i).
Блок 2 (2.i) может быть выполнен на базе микропроцессора. Блок 21.i определения координат по системе спутниковой навигации может быть выполнен на базе систем спутниковой навигации GPS и ГЛОНАСС и представляет собой приемник 21.i GPS сигналов с приемной антенной 20.i. Блок 22.i измерения толщины ледового покрова может быть выполнен на базе ультразвукового толщиномера. В качестве блока 23.i измерения состояния атмосферы может быть использован измерительный блок метеозонда.
Предпочтительно в составе комплекса используют блок электропитания, выполненный с возможностью подзарядки. В этом случае комплекс дополнительно содержит генератор электрической энергии, подключенный к входу блока электропитания. В качестве указанного генератора может быть использован ветрогенератор или генератор, использующий термопару.
В некоторых вариантах реализации блок 23.i определения состояния атмосферы выполнен с возможностью определения скорости ветра, температуры и влажности воздуха.
Штанга, на которой закреплен подводный навигационный маяк 24.i, может быть использован в качестве средства измерения толщины льда. Кроме того, на штанге может быть закреплен один из элементов термопары (второй элемент расположен над поверхностью льда), при этом генерированный термопарой электрический заряд поступает в аккумуляторную батарею. Мачта ветрогенератора может быть дополнительно использована в качестве антенны приемопередающих устройств.
Каждый используемый комплекс имеет свой индивидуальный код (идентификационный номер - ID), который приведен во всех радиограммах, отправляемых комплексом.
Совместное использование, по меньшей мере, трех навигационных комплексов обеспечивает ориентирование в пространстве подводного аппарата любого типа.
Навигационные комплексы обеспечивают выполнение следующих функций:
- подача сигналов подводной навигации;
- прием сигналов от навигационных спутниковых группировок;
- параллельное проведение измерений толщины льда;
- передача в эфир (по каналам спутниковой связи) собираемых данных в режиме он-лайн (в заданное время);
- о собственных координатах в настоящее время;
- о толщине льда, на котором они находятся в текущее время;
- о скорости ветра, давлении и влажности воздуха и температуре (по необходимости).
Установка и использование комплексов на заданном расстоянии обеспечивают возможность создания сети информационных комплексов в системе контроля движения льда и его состояния, для безопасной проводки судов по северному морскому пути и обеспечения безопасности объектов нефтегазопромысловой и гидротехнической инфраструктуры на шельфе и в прибрежной зоне в ледовитых морях и в условиях ледяного покрова, в том числе дрейфующего. Кроме того, установка и использование комплексов на заданном расстоянии обеспечивают возможность создания сети подводной навигации.
Основной особенностью системы, создаваемой при использовании устанавливаемых на лед комплексов, является возможность обеспечивать точный технический контроль состояния льда, его толщины, что позволяет при использовании специальных программных продуктов делать точный прогноз времени и качества формирования торосов, смещения льда и образования непроходимых для ледокольного флота ледовых условий. Кроме того, система указанных комплексов обеспечивает подводную навигацию.
Предлагаемая система работает следующим образом.
С целью передачи необходимой информации управления на избранный навигационный комплекс HКi (i=1, 2, …, n) на диспетчерском пункте ДП 1 с помощью блока 2 управления и компьютера 3 включается задающий генератор 4, который формирует высокочастотное гармоническое колебание
uc(t)=Uc⋅Cos(ωct+ϕс), 0≤t≤Тс,
где Uc, ωс, ϕс, Тс - амплитуда, несущая частота, начальная фаза и длительность гармонического колебания, которое поступает на первый вход фазового манипулятора 6, на второй вход которого подается модулирующий код M1(t) с второго выхода компьютера 3. Указанный модулирующий код соответствует идентификационному номеру запрашиваемого навигационного комплекса. На выходе фазового манипулятора 6 образуется сложный сигнал с фазовой манипуляцией (ФМн)
u1(t)=U1⋅Cos[ωct+ϕк1(t)+ϕс], 0≤t≤Тс,
где ϕк1(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии модулирующим кодом M1(t), причем ϕк1(t)=const при Кτэ<t<(к+1)τэ и может изменяться скачком при t=кτэ, т.е. на границах между элементарными посылками (к=1, 2, …, N-1); τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс(Тс=τэ⋅N).
Этот сигнал поступает на первый вход первого смесителя 8, на второй вход которого подается напряжение первого гетеродина 7
uг1(t)=Uг1⋅Cos(ωг1t+ϕг1).
На выходе смесителя 8 образуются напряжения комбинационных частот. Усилителем 9 выделяется напряжение первой промежуточной (суммарной) частоты
uпр1(t)=Uпр1⋅Cos[ωпр1t+ϕк1(t)+ϕпр1], 0≤t≤Tc,
ωпр1=ωc+ωг1=ω1 - первая промежуточная (суммарная) частота;
ϕпр1=ϕс+ϕг1,
которое после усиления в усилитель 10 мощности через дуплексер 11 поступает в приемопередающую антенну 12, излучается ею на частоте ω1 в эфир (в направлении навигационных комплексов), через КА-ретрансляторы, улавливается приемопередающей антенной 12.i навигационного комплекса и через дуплексер 11.i и усилитель 13.i мощности поступает на первый вход смесителя 15.i, на второй вход которого подается напряжение гетеродина 14.i
uг1(t)=Uг1⋅Cos(ωг1t+ϕг1).
На выходе смесителя 15.i образуются напряжения комбинационных частот. Усилителем 16.i выделяется напряжение второй промежуточной (разностной) частоты
uпр2(t)=Uпр2⋅Cos[ωпр2t+ϕк1(t)+ϕпр2], 0≤t≤Тс,
ωпр2=ωпр1-ωг1 - вторая промежуточная (разностная) частота;
ϕпр2=ϕпр1-ϕг1.
Одновременно напряжение uпр1(t) с выхода усилителя 13.i мощности поступает на первый вход колебательного контура 25.i, на второй вход которого подается напряжение гетеродина 7.i
uг2(t)=Uг2⋅Cos(ωг2t+ϕг2).
Частота настройки ωн2 колебательного контура 25.i и узкополосного фильтра 26.i выбирается равной частоте ωг2 гетеродина 7.i (ωн2=ωг2). При поступлении на первый вход колебательного контура 25.i напряжения uпр1(t) в нем возникает явление резонанса.
Выходное напряжение колебательного контура 25.i выделяется узкополосным фильтром 26.i, детектируется амплитудным детектором 27.i и поступает на вход порогового блока 28.i, где сравнивается с пороговым напряжением Uпор.
При резонансе выходного напряжения колебательного контура 25.i и узкополосного фильтра 26.i достигают максимального значения, выходное напряжение амплитудного детектора 27.i также достигает максимального значения Umax и превышает пороговый уровень Uпор в пороговом блоке 28.i (Umax>Uпор). И только при превышении порогового уровня Uпор в пороговом блоке 28.i формируется постоянное напряжение, которое поступает на управляющий вход ключа 29.i, открывая его. В исходном состоянии ключ 29.i всегда закрыт. При этом напряжение uпр2(t) с выхода усилителя 16.i второй промежуточной частоты через открытый ключ 29.i поступает на первый вход перемножителя 17.i, на второй вход которого подается напряжение гетеродина 7.i
uг2(t)=Uг2⋅Cos(ωг2t+ϕг2).
На выходе перемножителя 17.i образуется напряжение
u2(t)=U2⋅Cos[ωг1t-ϕк1(t)+ϕг1], 0≤t≤Тс,
ωг1=ωг2-ωпр2,
которое представляет собой ФМн сигнал на частоте ωг1 гетеродина 14.i. Это напряжение выделяется полосовым фильтром 18.i и поступает на первый (информационный) вход фазового детектора 19.i, на второй (опорный) вход которого подается напряжение Uг1(t) гетеродина 14.i. На выходе фазового детектора 19.i образуется низкочастотное напряжение
uн1(t)=Uн1⋅Cosϕк1(t), 0≤t≤Тс,
пропорциональное модулирующему коду M1(t). Это напряжение поступает в компьютер 3.i.
Частоты ωг1 и ωг2 гетеродинов разнесены на значение второй промежуточной частоты (фиг. 4)
ωг2-ωг1=ωпр2.
Если идентификационный номер Mи(t) запрашиваемого навигационного комплекса соответствует модулирующему коду M1(t), то в компьютере 3.i формируется команда, которая через блок 2.i управления воздействует на блоки 21.i, 22.i и 23.i, включая их. При этом информация с указанных блоков через компьютер 3.i поступает на вход формирователя 5.i модулирующего кода, где формируется суммарный модулирующий код:
MΣ(t)=Mи(t)+M2(t)+M3(t)+M4(t),
где Mи(t) - идентификационный номер навигационного комплекса;
M2(t) - модулирующий код, отображающий координаты (долгота и широта) навигационного комплекса;
М3(t) - модулирующий код, отображающий толщину льда;
M4(t) - модулирующий код, отображающий скорость ветра, температуру и влажность воздуха.
Одновременно с этим включается задающий генератор 4.i, который формирует высокочастотное гармоническое колебание
uci(t)=Uci⋅Cos(ωct+ϕci), 0≤t≤Tci,
которое поступает на первый вход фазового манипулятора 6.i, на второй вход которого с выхода формирователя 5.i модулирующего кода поступает суммарный модулирующий код MΣ(t).
На выходе фазового манипулятора 6.i образуется сложный ФМн сигнал
u3i(t)=U3i⋅Cos[ωct+ϕк2(t)+ϕci], 0≤t≤Tci,
где ϕк2(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с суммарным модулирующим кодом MΣ(t),
который поступает на первый вход смесителя 8.i, на второй вход которого подается напряжение гетеродина 7.i
uг2(t)=Uг2⋅Cos(ωг2t+ϕг2).
На выходе смесителя 8.i образуются напряжения комбинационных частот. Усилителем 9.i выделяется напряжение третьей промежуточной частоты
uпр3(t)=Uпр3⋅Cos[ωпр3t-ϕк2(t)+ϕпр3], 0≤t≤Tci,
ωпр3=ωг2-ωс - третья промежуточная частота;
ϕпр3=ϕг2-ϕсi,
которое после усиления в усилителе 10.1 мощности через дуплексер 11.i поступает в приемопередающую антенну 12.i, излучается ею на частоте ω2 в эфир (в направлении КА), переизлучается им в направлении диспетчерского пункта ДП, улавливается приемопередающей антенной 12 и через дуплексер 11 и усилитель 13 мощности поступает на первый вход смесителя 15, на второй вход которого подается напряжение гетеродина 14
uг2(t)=Uг2⋅Cos(ωг2t+ϕг2).
На выходе смесителя 15 образуются напряжения комбинационных частот. Усилителем 16 выделяется напряжение второй промежуточной (разностной) частоты
uпр4(t)=Uпр4⋅Cos[ωпр2t+ϕк2(t)+ϕпр2], 0≤t≤Тс,

ωпр2=ωг2-ωпр3 - вторая промежуточная (разностная) частота;
ϕпр2=ϕг2-ϕпр3.
Одновременно напряжение uпр3(t) с выхода усилителя 13 мощности поступает на первый вход колебательного контура 25, на второй вход которого подается напряжение гетеродина 7
uг1(t)=Uг1⋅Cos(ωг1t+ϕг1).
Частота настройки ωн1 колебательного контура 25 и узкополосного фильтра 26 выбирается равной частоте ωг1 гетеродина 7 (ωн1=ωг1). При поступлении на первый вход колебательного контура 25 напряжения uпр3(t) в нем возникает явление резонанса.
Выходное напряжение колебательного контура 25 выделяется узкополосным фильтром 26, детектируется амплитудным детектором 27 и поступает на вход порогового блока 28, где сравнивается с пороговым напряжением Uпор.
При резонансе выходные напряжения колебательного контура 25 и узкополосного фильтра 26 достигают максимального значения, выходное напряжение амплитудного детектора 27 также достигает максимального значения Umax и превышает пороговый уровень Uпор в пороговом блоке 28 (Umax>Uпор). И только при превышении порогового уровня Uпор в пороговом блоке 28 формируется постоянное напряжение, которое поступает на управляющий вход ключа 29, открывая его. В исходном состоянии ключ 29 всегда закрыт. При этом напряжение uпр4(t) с выхода усилителя 16 второй промежуточной частоты через открытый ключ 29 поступает на первый вход перемножителя 17, на второй вход которого подается напряжение uг1(t) гетеродина 7. На выходе перемножителя 17 образуется напряжение
u4(t)=U4⋅Cos[ωг2t+ϕк2(t)+ϕг2], 0≤t≤Тс,
ωг2=ωпр2-ωг1;
ϕг2=ϕпр1-ϕг1,
которое выделяется полосовым фильтром 18 и поступает на первый (информационный) вход фазового детектора 19, на второй (опорный) вход которого подается напряжение uг2(t) гетеродина 14. На выходе фазового детектора 19 образуется низкочастотное напряжение
uн2(t)=Uн2⋅Cosϕк2(t), 0≤t≤Тс,
пропорциональное суммарному модулирующему коду MΣ(t). Это напряжение поступает в компьютер 3.
Описанная выше работа супергетеродинных приемников соответствует случаю приема полезных ФМн сигналов по основным каналам на частотах ω1 и ω2 (фиг. 4).
Если ложный сигнал (помеха) поступает по первому зеркальному каналу на частоте ωз1
uз1(t)=Uз1⋅Cos(ωз1t+ϕз1), 0≤t≤Tз1,
то с выхода усилителя 13.i мощности он поступает на первый вход колебательного контура 25.i, частота настройки ωн2 которого выбирается равной частоте ωг2 гетеродина 7.i (ωн2=ωг2). Частоты ωз1 и ωг2 разнесены на удвоенное значение второй промежуточной частоты ωг2-ωз1=2ωпр2. Поэтому в колебательном контуре 25.i явление резонанса не наступает, выходное напряжение U амплитудного детектора 27.i не превышает порогового уровня в пороговом блоке 28.i (U<Uпop). Ключ 29.i не открывается и ложный сигнал (помеха) uз1(t), поступающий по первому зеркальному каналу на частоте ωз1, подавляется.
Если ложный сигнал (помеха) поступает по второму зеркальному каналу на частоте ωз2
uз2(t)=Uз2⋅Cos(ωз2t+ϕз2), 0≤t≤Тз2,
то он с выхода усилителя 13 мощности поступает на первый вход колебательного контура 25, частота настройки ωн1 которого выбирается равной частоте ωг1 гетеродина 7 (ωн1=ωг1). Частоты ωг1 и ωз2 разнесены на удвоенное значение второй промежуточной частоты ωз2-ωг1=2ωпр2. Поэтому в колебательном контуре 25 явление резонанса не наступает, выходное напряжение U амплитудного детектора 27 не превышает порогового уровня Uпор в пороговом блоке 28 (U<Uпор). Ключ 29 не открывается и ложный сигнал (помеха), поступающий по второму зеркальному каналу на частоте ωз2, подавляется.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемые по другим дополнительным (по первому ωк1, второму ωк2, третьему ωк3, четвертому ωк4 комбинационным) каналам.
Предлагаемая система обеспечивает возможность для удаленного автоматизированного мониторинга окружающей среды на больших территориях в условиях Арктики и оперативного обмена дискретной информацией между диспетчерским пунктом и навигационными комплексами. Это достигается за счет дуплексной радиосвязи с использованием сложных сигналов с фазовой манипуляцией, компьютеров и космических аппаратов спутниковой системы связи в качестве ретрансляторов.
Сложные ФМн сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн сигнала отнюдь не мала, она просто равномерно распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн сигналов априорно неизвестной структуры с целью повышения чувствительности приемников.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение избирательности, помехоустойчивости и достоверности дуплексной радиосвязи между диспетчерским пунктом и навигационными комплексами. Это достигается за счет подавления ложных сигналов (помех), принимаемых по дополнительным каналам. Причем для подавления ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам, используются колебательные контуры, реализующие явление резонанса.
Следует отметить, что явление резонанса является основополагающим принципом работы многих систем и устройств радиоэлектроники.
Индукционный датчик силы
Устройство для дистанционного измерения давления
Силоизмерительный датчик
Способ предварительной оценки качества диагностических тестов
Способ идентификации транспортных средств и выявления заявленных на поиск автомобилей при прохождении контрольных пунктов и устройство для его осуществления
Система защиты от несанкционированного доступа для транспортных средств
Способ дистанционного обнаружения вещества
Кодовая шкала
Способ контроля движения специальных транспортных средств
Способ обнаружения и идентификации разыскиваемых транспондеров из множества пассивных транспондеров и система для его осуществления
Устройство для дистанционного измерения давления
Система мониторинга безопасной эксплуатации зданий и инженерно-строительных сооружений
Трость для инвалида по зрению
Система дистанционного контроля и диагностики состояния конструкций и инженерно-строительных сооружений
Система контроля расхода и утечек бытового газа в многоквартирных домах
Экологическая система сбора информации о состоянии региона
Система охраны и наблюдения
Способ идентификации транспортных средств и выявления заявленных на поиск автомобилей при прохождении контрольных пунктов и устройство для его осуществления
Способ управления самолетом при заходе на посадку
Радиоприемное устройство для обнаружения широкополосных сигналов с фазовой манипуляцией

