Результат интеллектуальной деятельности: СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ
Вид РИД
Изобретение
Предлагаемый способ относится к области идентификации транспортных средств и может быть использован в системах контроля движения специальных транспортных средств.
Известны способы и устройства контроля движения транспортных средств (патенты РФ №№2.006.394, 2.011.575, 2.033.353, 2.042.548, 2.057.334, 2.058.906, 2.061.323, 2.209.145, 2.248.896, 2.254.245, 2.302.953, 2.373.082, 2.403.623; 2.417.909; Дикарев В.И., Журкович А.В., Рыбкин Л.В., Сергеева В.Г. Защита транспортных средств и грузов от угона и краж. Под ред. д.т.н. В.В. Журковича. Санкт-Петербург, издательство «Гуманистика», 2004, с.103-240 и другие).
Из известных способов и устройств наиболее близким к предлагаемому является «Территориальная система контроля транспортировки особо важных и опасных грузов» (патент РФ №2.403.623, G08B 25/10, 2009), которая и выбрана в качестве базового объекта.
К специальным транспортным средствам можно отнести городской наземный транспорт (автобусы, троллейбусы и трамваи), мусоровозы. обеспечивающие вывоз бытового и промышленного мусора на специальные свалки или в места их переработки, инкассаторские машины, обеспечивающие перевоз денежных средств из банка различным организациям и из торговых организаций в банк, специально оборудованные машины для перевозки музейных ценностей, боеприпасов, взрывчатых веществ и др.
Например, контроль за городским транспортом предусматривает выполнение регламентированного графика движения по заданному маршруту, контроль за мусоровозами предусматривает выполнение также регламентированного графика движения по заданному маршруту, исключая возможности «левых» рейсов и освобождение от мусора на несанкционированных свалках, контроль за инкассаторскими машинами исключает возможность похищения денежных средств как преступными элементами, так и сотрудниками инкассаторской службы.
Технической задачей изобретения является расширение функциональных возможностей способа путем контроля за выполнением регламентированного графика движения специальных транспортных средств по заданному маршруту и использования сложных сигналов с фазовой манипуляцией.
Поставленная задача решается тем, что способ контроля движения транспортных средств, заключающийся, в соответствии с ближайшим аналогом, в установке на транспортном средстве пассивного ответчика с антенной, его радиозондировании путем облучения пассивного ответчика радиосигналом, выработке пассивным ответчиком кодового слова, содержащего информационную часть с данными о транспортном средстве, переизлучении сформированного ответного сигнала, последующем его приеме и дешифрации информации для получения данных о транспортном средстве, при этом на транспортном средстве устанавливают приемопередающий узел зондирования с энергонезависимой памятью, в которую заносят идентификационные данные о транспортном средстве, прием и дешифрацию ответного сигнала осуществляют приемопередающим узлом зондирования, после приема сравнивают полученные в результате дешифрации ответного сигнала данные о транспортном средстве с данными, хранящимися в энергонезависимой памяти приемопередающего узла зондирования, по результатам сравнения принимают решение о разрешении или запрете эксплуатации транспортного средства, зондирование осуществляют в начале эксплуатации, а пассивный ответчик жестко закрепляют на номерном знаке транспортного средства, пассивные ответчики размещают в контрольных точках по заданному маршруту движения специальных транспортных средств, в качестве каждого пассивного ответчика используют пьезокристалл с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, а в качестве зондирующего радиосигнала используют гармонические колебания на частотах w1 и w2=2w1, пассивный ответчик, размещенный на транспортном средстве, настраивают на частоту w1, а пассивные ответчики, размещенные в контрольных точках по заданному маршруту движения специальных транспортных средствах, настраивают на частоту w2, гармоническое колебание на частоте w1 или w2 принимают антенной пассивного ответчика, преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну в сложный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, переизлучают его в эфир, принимают приемопередающим узлом зондирования, выделяют сложные сигналы с фазовой манипуляцией на частотах w1 и w2, осуществляют синхронное их детектирование с использованием в качестве опорных напряжений гармонических колебаний с частотами w1 и w2 соответственно, выделяют низкочастотные напряжения, пропорциональные данным о транспортном средстве и координатам контрольной точки, низкочастотное напряжение, пропорциональное координатам контрольной точки, регистрируют совместно с текущим временем.
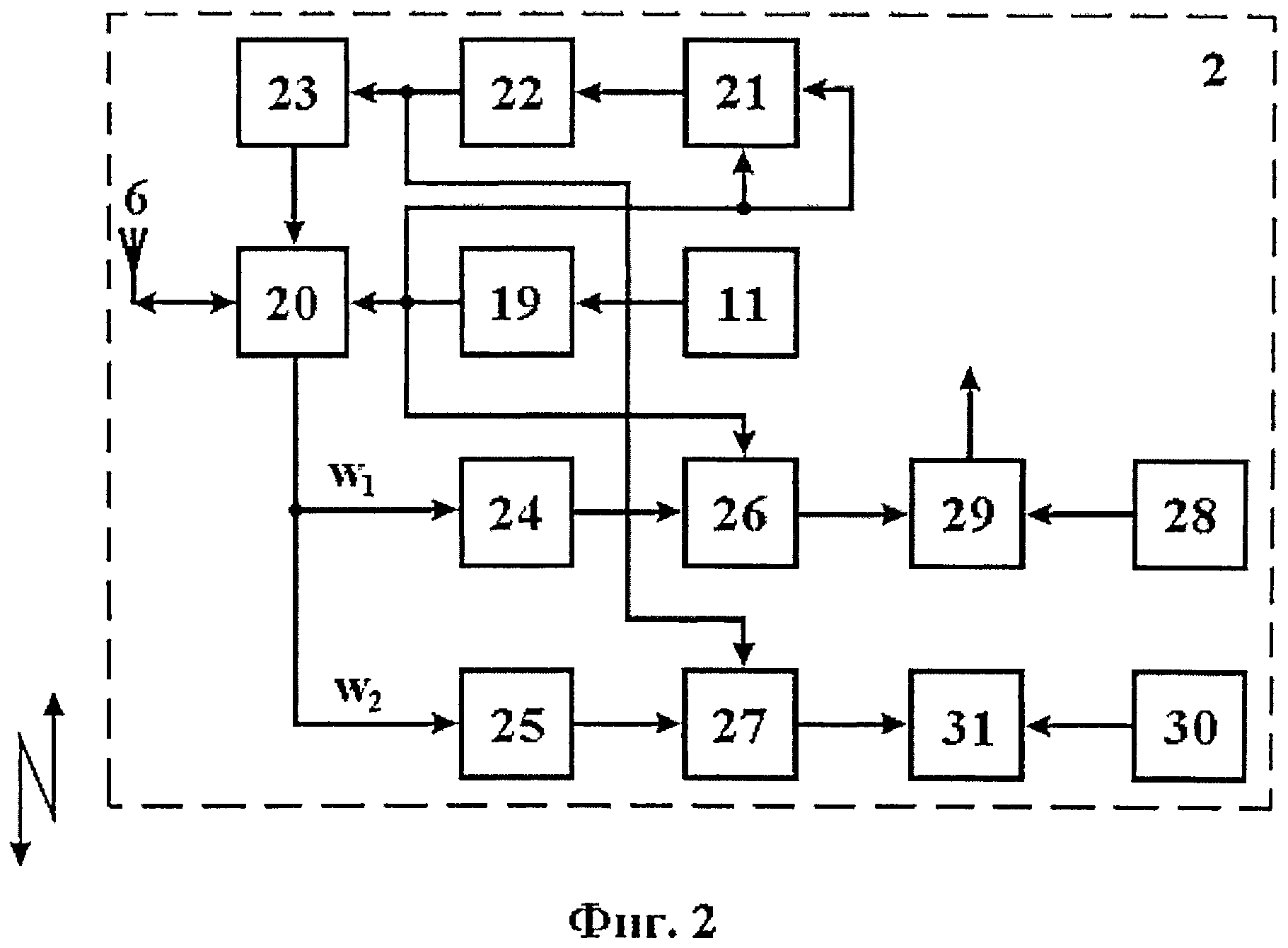
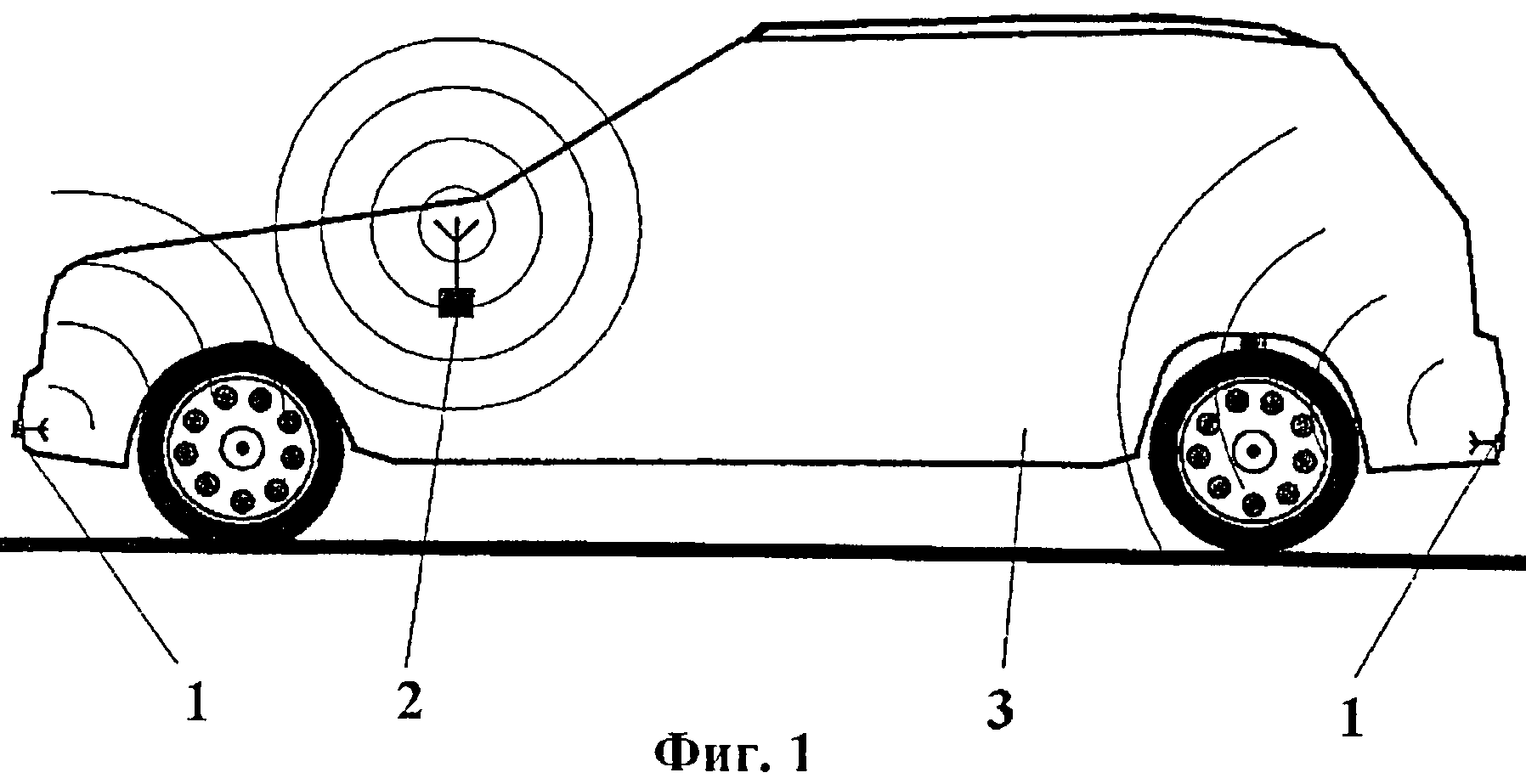
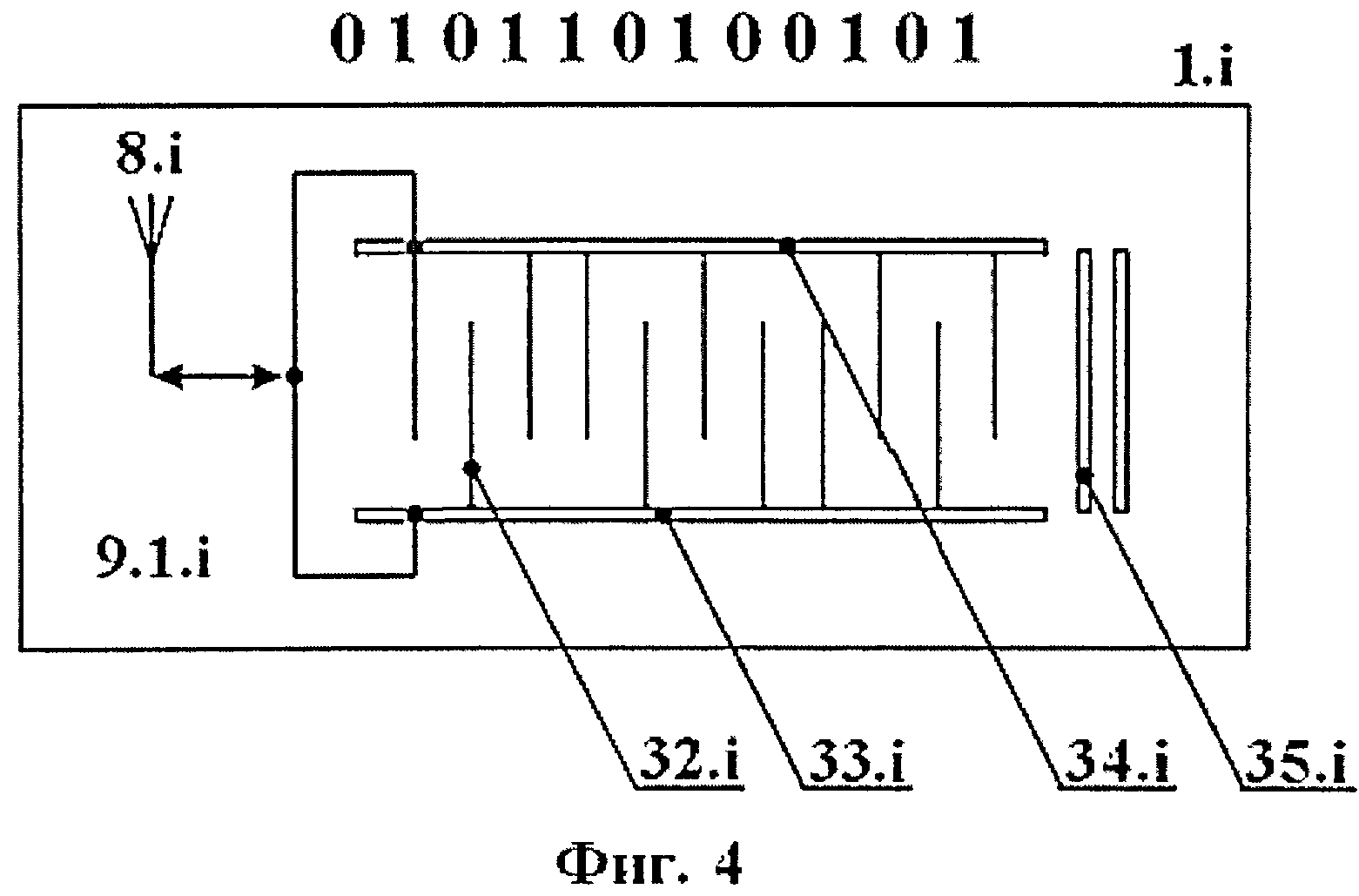
Предлагаемый способ контроля движения транспортных средств поясняется с помощью чертежей, где на фиг.1 схематично показан пример размещения пассивного ответчика на транспортном средстве. Структурная схема узла 2 зондирования представлена на фиг.2. Функциональная схема пассивного ответчика 1, установленного на транспортном средстве, изображена на фиг.3. Функциональная схема пассивного ответчика 1.i (i=1, 2, …, n), установленного в контрольной точке по заданному маршруту движения специального транспортного средства, изображена на фиг.4.
На транспортном средстве 3 установлены узел 2 зондирования и пассивные ответчики 1 (фиг.1).
Узел 2 зондирования содержит последовательно включенные генератор 11 запуска передатчика, задающий генератор 19, циркулятор 20, вход-выход которого связан с приемопередающей антенной 6, первый полосовой фильтр 24, первый фазовый детектор 26, второй вход которого соединен с выходом задающего генератора 19, и блок 29 сравнения кодов, второй вход которого соединен с выходом блока 28 памяти. К выходу задающего генератора 19 последовательно подключены перемножитель 21, второй вход которого соединен с выходом задающего генератора 19, узкополосный фильтр 22, усилитель 23 мощности, циркулятор 20, второй полосовой фильтр 25, второй фазовый детектор 27, второй вход которого соединен с выходом узкополосного фильтра 22, и блок 31 регистрации, второй вход которого соединен с выходом таймера 30.
Каждый пассивный ответчик 1 (1.i, i=1, 2, …, n) выполнен в виде пьезокристалла 9.1 (9.1.i) с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с приемопередающей антенной 8 (8.i), и набором отражателей 35 (35.i). Встречно-штыревой преобразователь (ВШП) поверхностных акустических волн (ПАВ) содержит две гребенчатые системы электродов 32 (32.i), шины 33 (33.i) и 34 (34.i), которые соединяют электроды 32 (32.i) каждой из гребенок между собой. Шины 33 (33.i) и 34 (34.i), в свою очередь, связаны с микрополосковой приемопередающей антенной 8 (8.i) (фиг.4).
Способ контроля движения специальных транспортных средств реализуют следующим образом.
На номерном знаке транспортного средства 3 неразъемно (жестко) закрепляют пассивный ответчик 1, в качестве которого используют радиометку на ПАВ. Пассивный ответчик 1 закрепляют на номерном знаке транспортного средства 3 так, чтобы его снятие было бы невозможно без разрушения пассивного ответчика 1, например, путем заливки места установки эпоксидной смолой. Причем структура ВШП пассивного ответчика 1 содержит все необходимые данные о транспортном средстве, которые включают номер государственной регистрации этого транспортного средства, а также могут включать номера агрегатов транспортно средства, в том числе номер кузова, номер шасси, номер двигателя и пр. На самом транспортном средстве 3 устанавливают узел 2 зондирования с узлом энергонезависимой памяти, в который также заносит идентификационные данные о транспортном средстве.
Пассивный ответчик 1, закрепленный на номерном знаке транспортного средства 3, настраивают на несущую частоту w1.
В контрольных точках по заданному маршруту движения специальных транспортных средств устанавливают пассивные ответчики 1.i (i=1, 2, …, n), которые настраивают на несущую частоту w2.
Резонансная частота пассивных ответчиков 1 и 1.i (i=1, 2, …, n) определяется расстоянием между электродами 32 (32.i) и их количеством.
Частоты w1 и w2 канала радиосвязи выбирают ближе к коротковолновой части радиодиапазона, что позволяет уменьшить габаритные размеры приемопередающего тракта узла 2 зондирования и пассивных ответчиков 1 и 1.i (i=1, 2, …, n, где n - количество контрольных точек на заданном маршруте движения специальных транспортных средств). Приемопередающий узел 2 зондирования устанавливают на транспортном средстве 3 таким образом, чтобы излучаемые им зондирующие сигналы были бы приняты пассивными ответчиками 1 и 1.i (i=1, 2, …, n) и позволяли бы сформировать в пассивных ответчиках 1 и 1.i ответные радиосигналы, которые, в свою очередь, могли бы быть приняты и обработаны приемопередающим узлом 2 зондирования.
Зондирование пассивного ответчика 1 осуществляют перед началом движения транспортного средства 3 и затем может осуществляться в процессе движения по установленному заранее графику, который может предполагать, например, ежечасный опрос пассивного датчика либо иной период.
Перед началом работы транспортного средства 3, например, во время поворота ключа зажигания включается генератор 11 запуска передатчика, который, в свою очередь, включает задающий генератор 19. Последний формирует высокочастотное колебание
u1(t)=U1·Cos(w1t+φ1), 0≤t≤T1,
где U1, w1, φ1, T1 - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания, которое поступает на два входа перемножителя 21, на выходе которого образуется гармоническое колебание
u2(t)=U2·Cos(w2t+φ2), 0≤t≤T1,
где  ;
;
w2=2w1; φ2=2φ1,
которое выделяется узкополосным фильтром 22 и поступает через усилитель 23 мощности на второй вход циркулятора 20.
Высокочастотные колебания u1(t) и u2(t) через циркулятор 20 поступают в приемопередающую антенну 6 и излучаются ею в эфир. Высокочастотное колебание u1(t) улавливается пассивным ответчиком 1, настроенным на несущую частоту w1, преобразует ВШП в акустическую волну, которая распространяется по поверхности пьезокристалла 9.1 со скоростью V, которая примерно на пять порядков меньше скорости С распространения электромагнитных волн (V<<C). Акустическая волна отражается от набора отражателей и опять преобразуется в сложный сигнал с фазовой манипуляцией (ФМн) (фиг.3)
u3(t)=U3·Cos[wit+φк1(t)+φ1], 0≤t≤T1,
где φк1(t)={0; π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии со структурой ВШП, которая содержит все необходимые данные о транспортном средстве 3 (номер государственной регистрации, номер шасси, номер кузова, номер двигателя и пр.), который излучается микрополосковой приемопередающей антенной 8 в эфир, улавливается приемопередающей антенной 6 узла 2 зондирования и через циркулятор 20 и полосовой фильтр 24, частота настройки wн1 которого равна w1 (wн1=w1), поступает на первый (информационный) вход фазового детектора 26, на второй (опорный) вход которого подается гармоническое колебание u1(t) с выхода задающего генератора 19. В результате синхронного детектирования на выходе фазового детектора 26 образуется низкочастотное напряжение
uн1(t)=Uн1·Cosφк1(t), 0≤t<T1,
где 
пропорциональное информации о транспортном средстве.
Низкочастотное напряжение uн1(t) поступает на первый вход блока 29 сравнения кодов, на второй вход которого подается код с идентификационными данными о транспортном средстве 3. Если указанные коды равны, то на выходе блока 29 сравнения кодов напряжение отсутствует, что является разрешением дальнейшей эксплуатации транспортного средства.
Если же указанные коды не равны, то на выходе блока 29 сравнения кодов формируется постоянное напряжение, которое является командой запрета использования транспортного средства. По этой команде происходит блокирование систем питания и электроснабжения двигателя транспортного средства.
Таким образом, результатом несанкционированной смены номерного знака транспортного средства является неспособность его перемещения своим ходом.
Для контроля выполнения регламентированного графика движения специальных транспортных средств по заданному маршруту используются пассивные ответчики 1.i (i=1, 2, …, n), устанавливаемые в контрольных точках по заданному маршруту.
При прохождении контрольной точки узел 2 зондирования специального транспортного средства облучает пассивный ответчик 1.i, установленный в контрольной точке, гармоническими колебаниями:
u1(t)=U1·Cos(w1t+φ1),
U2(t)=U2·Cos(w2t+φ2), 0≤t<T1.
При этом гармоническое колебание u2(t) улавливается микрополосковой приемопередающей антенной 8.1 пассивного ответчика 1.i (i=1, 2, …, n), настроенного на несущую частоту w2, преобразуется ВШП в акустическую волну, которая распространяется по поверхности пьезокристалла 9.1.i. Акустическая волна отражается от набора 35.i отражателей и преобразуется ВШП в сложный сигнал с фазовой манипуляцией
u4(t)=U4·Cos[w2t+φк2(t)+φ2], 0≤t≤T2,
где φк2(t)={0; π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии со структурой ВШП, которая содержит об идентификационном номере контрольной точки и координатах ее расположения на заданном маршруте движения специального транспортного средства,
который излучается микрополосковой приемопередающей антенной 8.i в эфир, улавливается приемопередающей антенной 6 узла 2 зондирования и через циркулятор 20 и полосовой фильтр 25, частота настройки wн2 которого равна w2 (wн2=w2), поступает на первый (информационный) вход фазового детектора 27, на второй (опорный) вход которого подается гармоническое колебание u2(t) с выхода узкополосного фильтра 22. В результате синхронного детектирования на выходе фазового детектора 27 образуется низкочастотное напряжение
uн2(t)=Uн2·CoSφк2(t), 0≤t<T2,
где  ;
;
пропорциональное идентификационному номеру контрольной точки и координатам ее расположения на заданном маршруте движения специального транспортного средства.
Указанное низкочастотное напряжение поступает на первый вход блока 31 регистрации, где и фиксируется вместе с текущим временем, которое поступает на второй блок 31 регистрации с выхода таймера 30.
Следовательно, в блоке 31 регистрации будут последовательно зафиксированы все контрольные точки и время их прохождения специальным транспортным средством при его движении по заданному маршруту.
Несовпадение времени прохождения контрольной точки специальным транспортным средством с заданным временем свидетельствует о нарушении регламентированного графика движения по заданному маршруту. Отсутствие в блоке 31 регистрации некоторых контрольных точек свидетельствует о нарушении заданного маршрута движения.
Предлагаемый способ может быть реализован на стандартных компонентах с использованием интегральных микросхем, созданных в том числе с применением нанотехнологий, а также конструктивных элементов из металлических и иных широко применяемых материалов.
Таким образом, предлагаемый способ по сравнению с базовым объектом и другими техническими решениями аналогичного назначения позволяет осуществлять контроль за выполнением регламентированного графика движения специальных транспортных средств по заданному маршруту. Это достигается использованием пассивных ответчиков, устанавливаемых в контрольных точках по заданному маршруту движения специальных транспортных средств (автобусов, троллейбусов, трамваев, мусоровозов, инкассаторских машин и т.п.), и сложных сигналов с фазовой манипуляцией.
Сложные ФМн-сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность сложных ФМн-сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскирован шумами и помехами. Причем энергия ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемного устройства.
Для развязки пассивных ответчиков выбраны разные частоты w и w2=2w1.
Тем самым функциональные возможности известного способа расширены.
Способ контроля движения специальных транспортных средств, заключающийся в установке на транспортном средстве пассивного ответчика с антенной, его радиозондировании путем облучения пассивного ответчика радиосигналом, выработке пассивным ответчиком кодового слова, содержащего информационную часть с данными о транспортном средстве, переизлучении сформированного ответного сигнала, последующем его приеме и дешифрации информации для получения данных о транспортном средстве, при этом на транспортном средстве устанавливают приемопередающий узел зондирования с энергонезависимой памятью, в которую заносят идентификационные данные о транспортном средстве, прием и дешифрацию ответного сигнала осуществляют приемопередающим узлом зондирования, после приема сравнивают полученные в результате дешифрации ответного сигнала данные о транспортном средстве с данными, хранящимися в энергонезависимой памяти приемопередающего узла зондирования, по результатам сравнения принимают решение о разрешении или запрете эксплуатации транспортного средства, зондирование осуществляют в начале эксплуатации, а пассивный ответчик жестко закрепляют на номерном знаке транспортного средства, пассивные ответчики размещают в контрольных точках по заданному маршруту движения специальных транспортных средств, в качестве каждого пассивного ответчика используют пьезокристалл с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем, связанным с микрополосковой антенной, и набором отражателей, а в качестве зондирующего радиосигнала используют гармонические колебания на частотах w и w=2w, пассивный ответчик, размещенный на транспортном средстве, настраивают на частоту w, а пассивные ответчики, размещенные в контрольных точках по заданному маршруту движения специальных транспортных средств, настраивают на частоту w, гармоническое колебание на частоте w или w принимают антенной пассивного ответчика, преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну в сложный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревого преобразователя, переизлучают его в эфир, принимают приемопередающим узлом зондирования, выделяют сложные сигналы с фазовой манипуляцией на частотах w и w, осуществляют синхронное их детектирование с использованием в качестве опорных напряжений гармонических колебаний с частотами w и w соответственно, выделяют низкочастотные напряжения, пропорциональные данным о транспортном средстве и координатам контрольной точки, низкочастотное напряжение, пропорциональное координатам контрольной точки, регистрируют совместно с текущим временем.
Индукционный датчик силы
Устройство для дистанционного измерения давления
Система мониторинга безопасной эксплуатации зданий и инженерно-строительных сооружений
Трость для инвалида по зрению
Система дистанционного контроля и диагностики состояния конструкций и инженерно-строительных сооружений
Система контроля расхода и утечек бытового газа в многоквартирных домах
Экологическая система сбора информации о состоянии региона
Силоизмерительный датчик
Способ предварительной оценки качества диагностических тестов
Система охраны и наблюдения
Индукционный датчик силы
Устройство для дистанционного измерения давления
Система мониторинга безопасной эксплуатации зданий и инженерно-строительных сооружений
Трость для инвалида по зрению
Система дистанционного контроля и диагностики состояния конструкций и инженерно-строительных сооружений
Система контроля расхода и утечек бытового газа в многоквартирных домах
Экологическая система сбора информации о состоянии региона
Силоизмерительный датчик
Способ предварительной оценки качества диагностических тестов
Система охраны и наблюдения

