Результат интеллектуальной деятельности: СПОСОБ ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления движением и к оборудованию управления движением, которые управляют движением транспортного средства.
Уровень техники
[0002] Известно устройство для управления расстоянием между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством (например, патентный документ 1: JP2007-320458A). Это устройство работает с возможностью захватывать изображение впереди рассматриваемого транспортного средства с использованием камеры, чтобы обнаруживать сигнал светофора и едущее впереди транспортное средство, расположенное впереди, и когда сигнал светофора и едущее впереди транспортное средство обнаруживаются, но сигнал светофора затем становится необнаруженным, управлять движением транспортного средства таким образом, чтобы увеличивать расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2007-320458A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, когда рассматриваемое транспортное средство движется таким образом, что оно едет за едущим впереди транспортным средством автоматизированным или автономным способом, если расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством увеличивается, аналогично вышеприведенному предшествующему уровню техники, затруднительно обнаруживать траекторию движения едущего впереди транспортного средства. Это может быть проблематичным.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ управления движением для транспортного средства и оборудование управления движением для транспортного средства, с помощью которых, когда транспортное средство движется таким образом, что оно следует по траектории движения едущего впереди транспортного средства автоматизированным или автономным способом, траектория движения едущего впереди транспортного средства может надлежащим образом обнаруживаться.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему следующим образом. В способе управления движением для транспортного средства, в котором определенное целевое расстояние между транспортными средствами задается из множества задаваемых целевых расстояний между транспортными средствами, и рассматриваемое транспортное средство управляется чтобы следовать, автоматизированным или автономным способом, по траектории движения едущего впереди транспортного средства, движущегося впереди рассматриваемого транспортного средства, когда режим движения со следованием по траектории для следования по траектории движения едущего впереди транспортного средства автоматизированным или автономным способом переходит из выключенного состояния во включенное состояние, либо когда рассматриваемое транспортное средство приближается к дуге, перекрестку, уклону или развязке, целевое расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством задается равным относительно небольшому значению из числа задаваемых значений.
Преимущества изобретения
[0007] Согласно настоящему изобретению, в конкретной ситуации, в которой оценивается то, что обнаружение едущего впереди транспортного средства является затруднительным, целевое расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством задается равным относительно небольшому значению из числа задаваемых значений, и рассматриваемое транспортное средство в силу этого приближается относительно близко к едущему впереди транспортному средству. Это обеспечивает возможность простого обнаружения едущего впереди транспортного средства.
Краткое описание чертежей
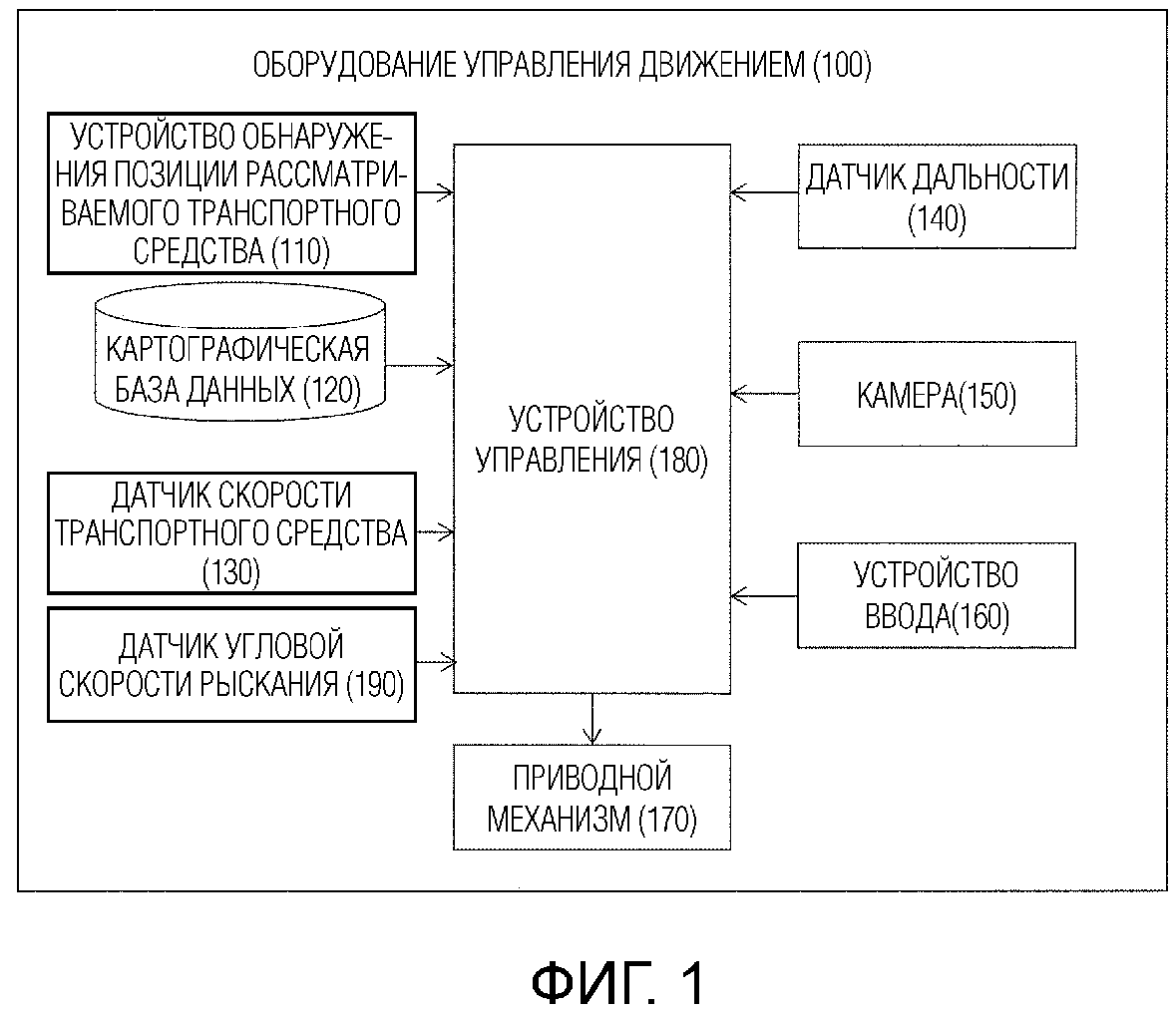
[0008] Фиг. 1 является блок-схемой, иллюстрирующей оборудование управления движением согласно варианту осуществления настоящего изобретения.
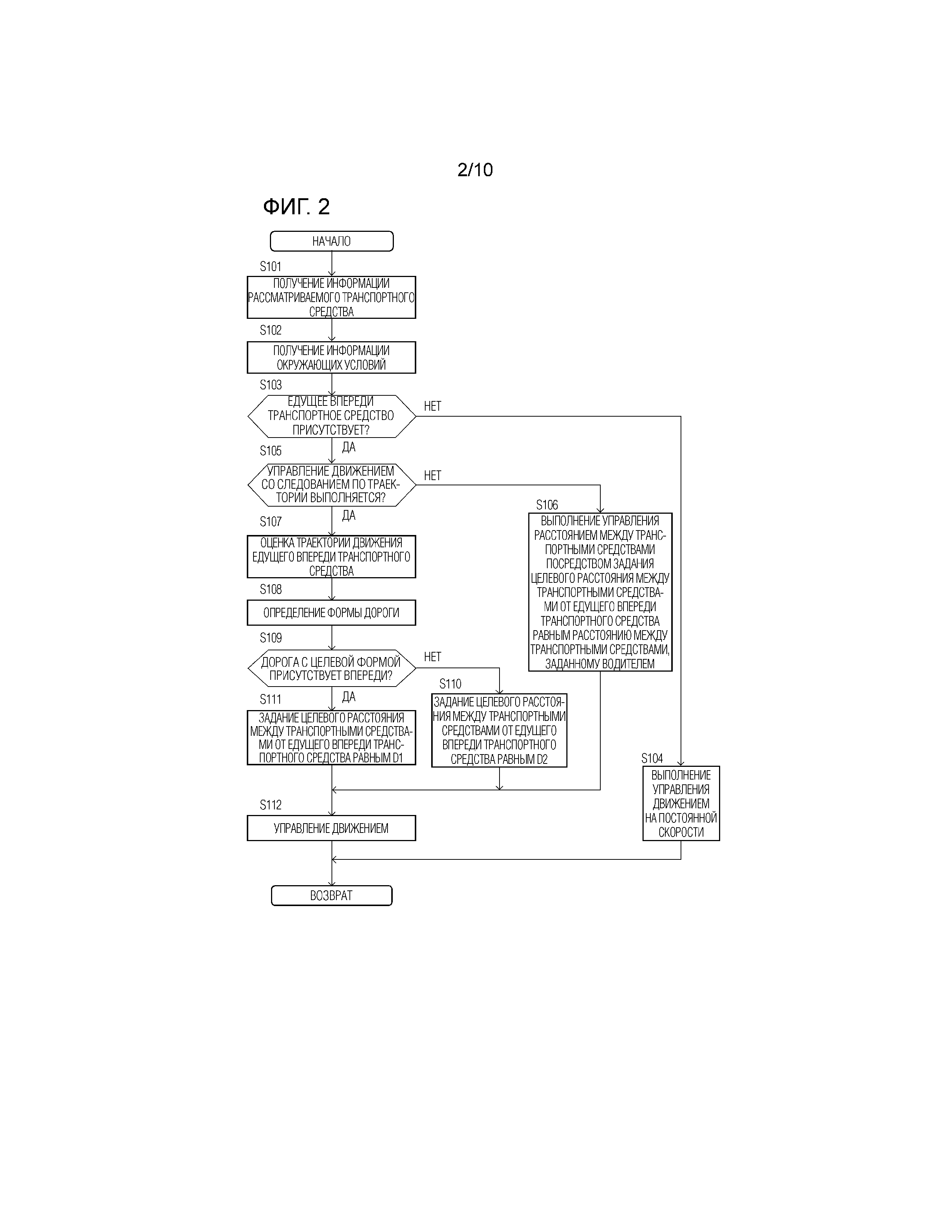
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением, выполняемый в устройстве управления по фиг. 1.
Фиг. 3 является графиком, иллюстрирующим взаимосвязь между расстоянием между транспортными средствами от рассматриваемого транспортного средства до едущего впереди транспортного средства и разрешением обнаружения позиции для траектории движения едущего впереди транспортного средства.
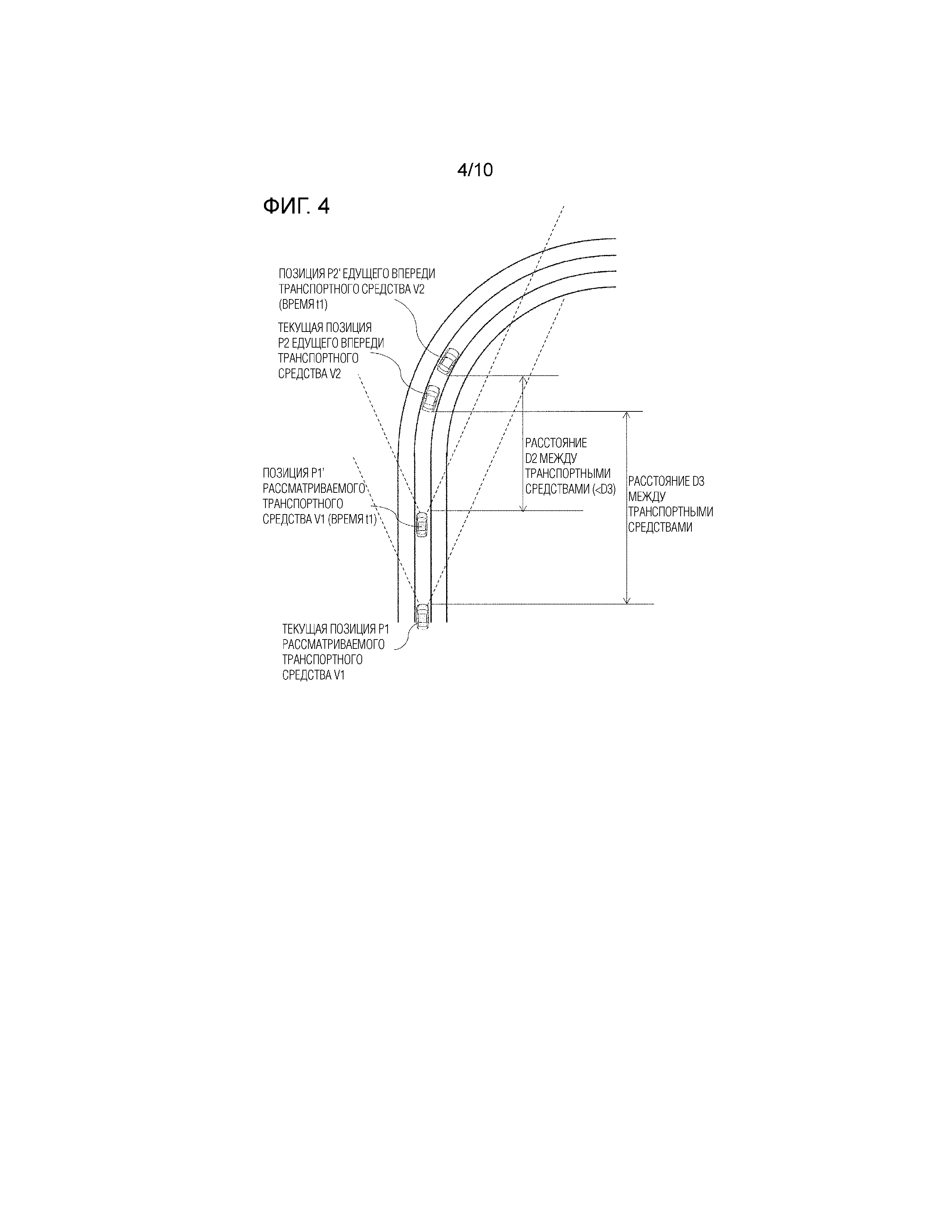
Фиг. 4 является видом сверху, иллюстрирующим пример окружения, в котором режим движения со следованием по траектории рассматриваемого транспортного средства переходит во включенное состояние.
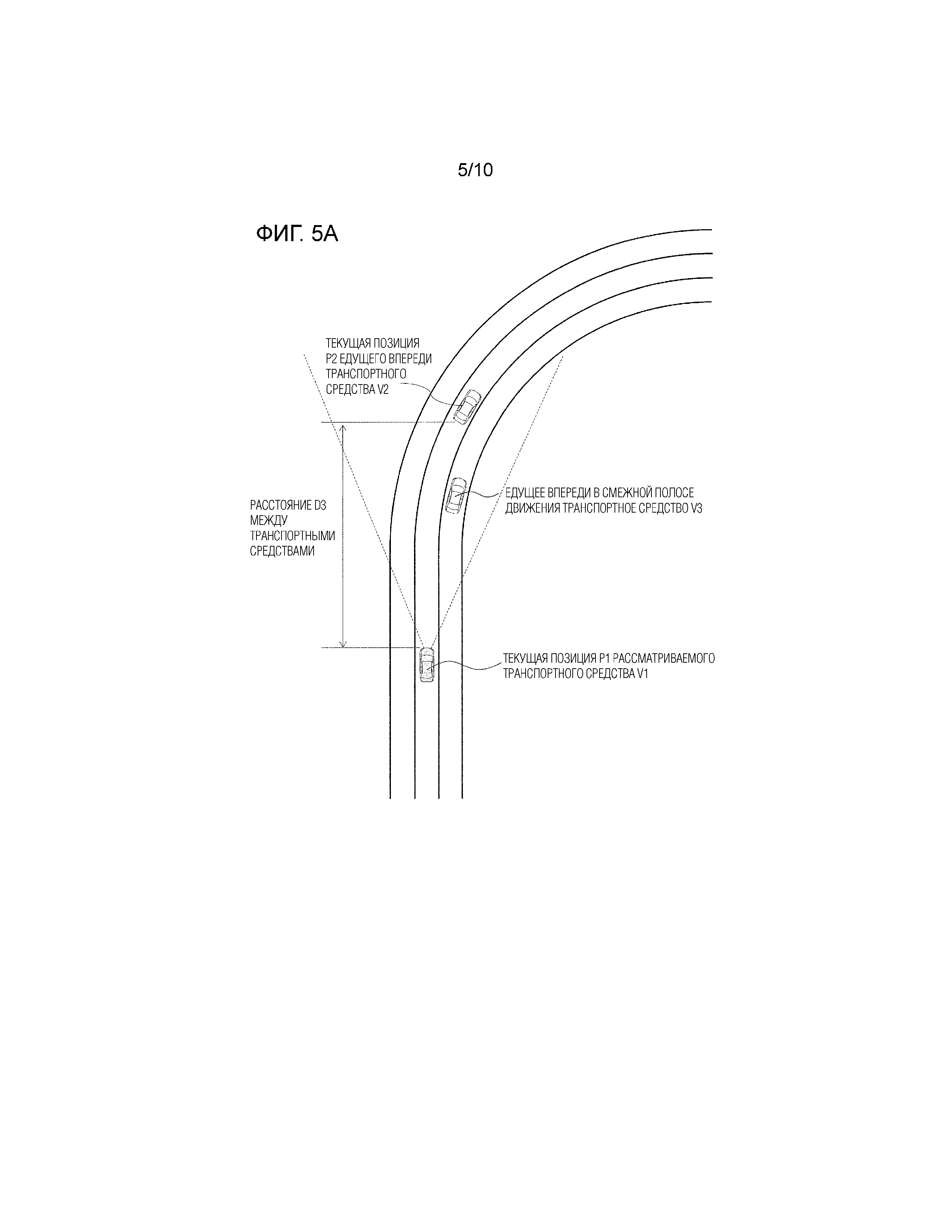
Фиг. 5A является видом сверху, иллюстрирующим пример окружения начала движения по дуге во включенном состоянии режима движения со следованием по траектории рассматриваемого транспортного средства.
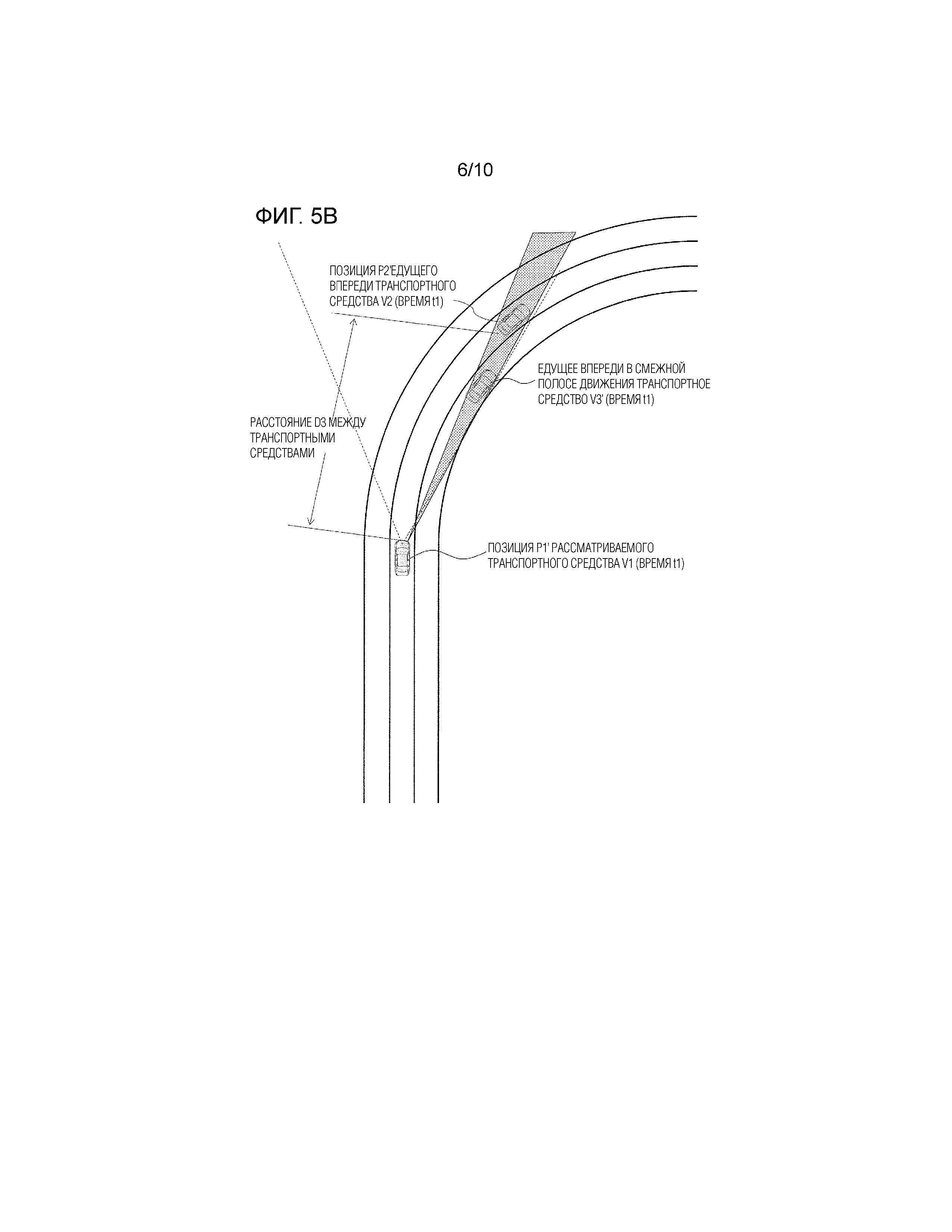
Фиг. 5B является видом сверху, иллюстрирующим пример (Сравнительный Пример) окружения движения по дуге при поддержании расстояния D3 между транспортными средствами из окружения, проиллюстрированного на фиг. 5A.
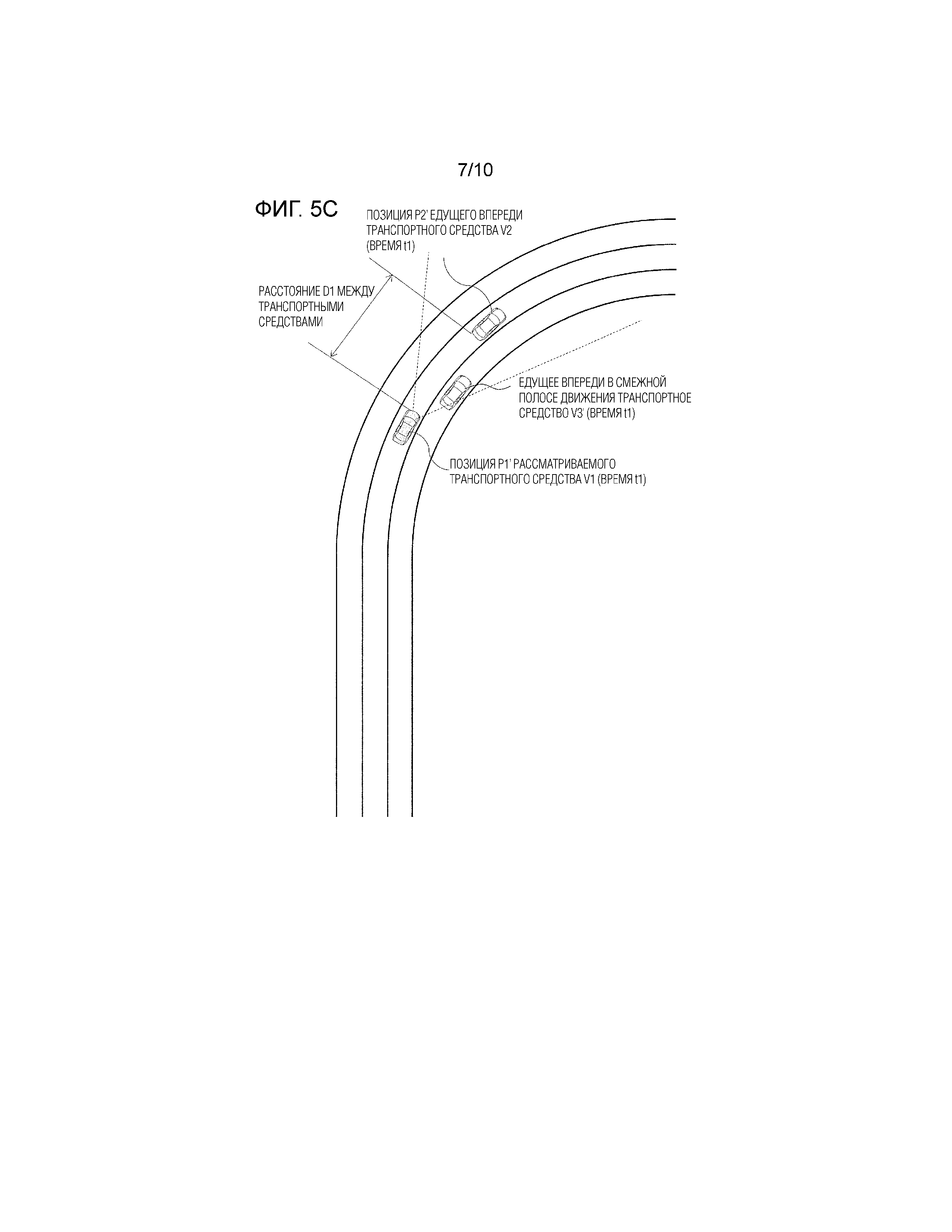
Фиг. 5C является видом сверху, иллюстрирующим пример (Пример) окружения движения по дуге посредством задания расстояния между транспортными средствами равным D1 (<D3) в окружении, проиллюстрированном на фиг. 5A.
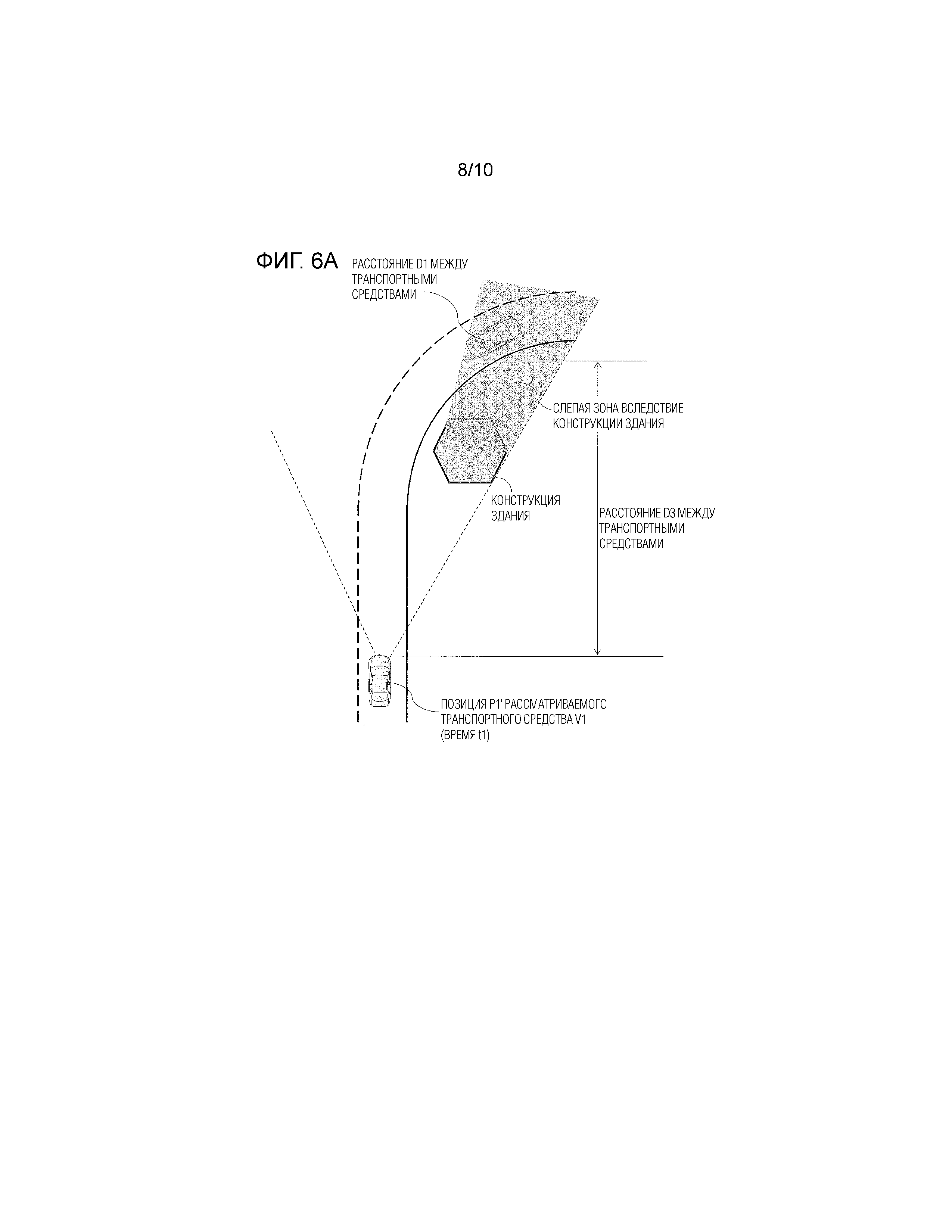
Фиг. 6A является видом сверху, иллюстрирующим пример (Сравнительный Пример) окружения движения через перекресток с конструкцией здания при поддержании расстояния D3 между транспортными средствами во включенном состоянии режима движения со следованием по траектории рассматриваемого транспортного средства.
Фиг. 6B является видом сверху, иллюстрирующим пример (Пример) окружения движения через перекресток с конструкцией здания посредством задания расстояния между транспортными средствами равным D1 (<D3) при въезде на перекресток во включенном состоянии режима движения со следованием по траектории рассматриваемого транспортного средства.
Фиг. 7 является видом сверху, иллюстрирующим пример (Сравнительный Пример) окружения движения под уклон при поддержании расстояния D3 между транспортными средствами во включенном состоянии режима движения со следованием по траектории рассматриваемого транспортного средства и пример (Пример) окружения движения под уклон посредством задания расстояния между транспортными средствами равным D1 (<D3) при въезде на уклон.
Режим(ы) осуществления изобретения
[0009] В дальнейшем в этом документе, описываются оборудование и способ для управления движением транспортного средства согласно варианту осуществления настоящего изобретения со ссылкой на чертежи. В этом варианте осуществления, настоящее изобретение описывается посредством примерной иллюстрации оборудования управления движением, оснащенного в транспортном средстве.
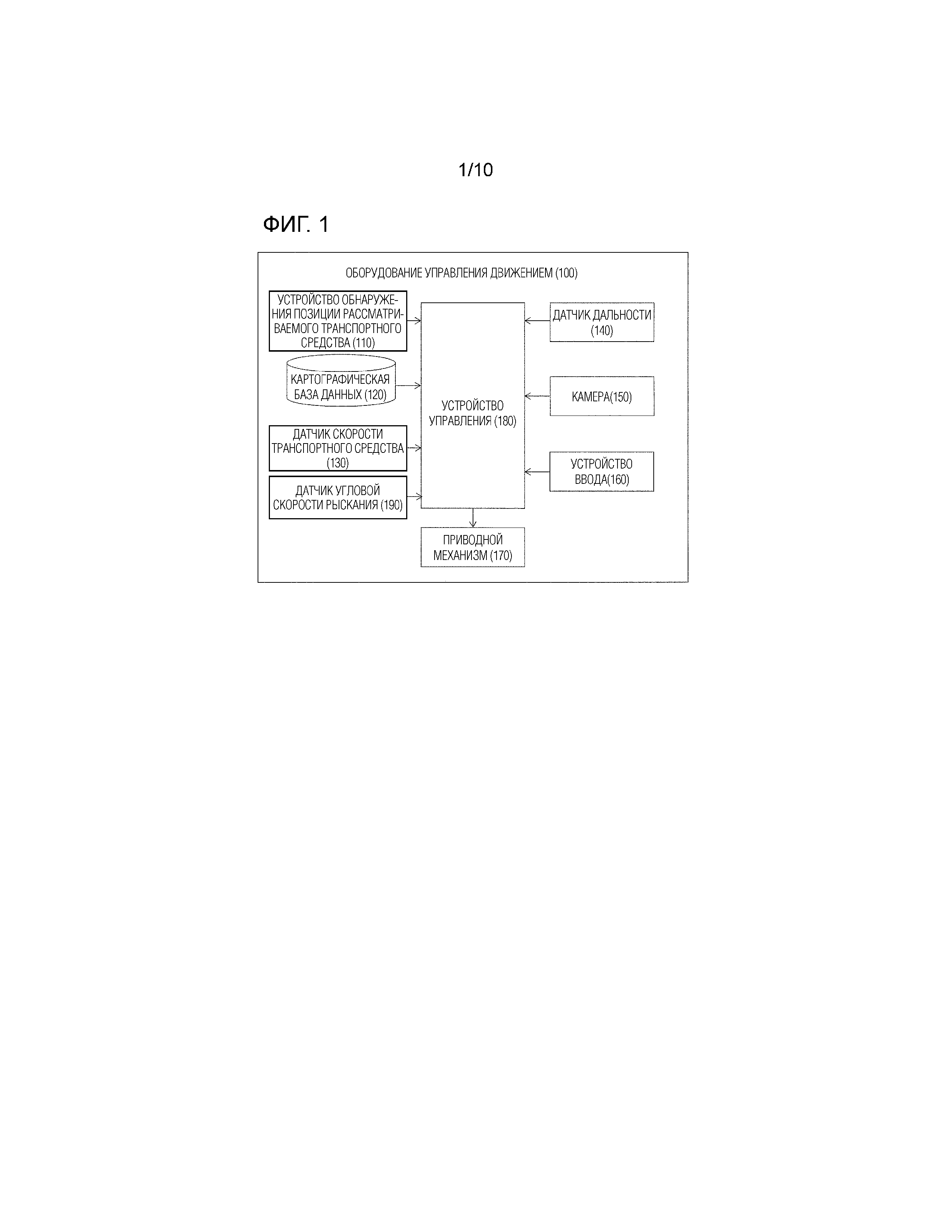
[0010] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию оборудования 100 управления движением для транспортного средства согласно варианту осуществления настоящего изобретения. Как проиллюстрировано на фиг. 1, оборудование 100 управления движением согласно настоящему варианту осуществления содержит устройство 110 обнаружения позиции рассматриваемого транспортного средства, картографическую базу 120 данных, датчик 130 скорости транспортного средства, датчик 140 дальности, камеру 150, устройство 160 ввода, приводной механизм 170, устройство 180 управления и датчик 190 угловой скорости рыскания. Эти компоненты соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0011] Устройство 110 обнаружения позиции рассматриваемого транспортного средства, которое включает в себя GPS-модуль, обнаруживает радиоволны, передаваемые из множества спутников связи, чтобы периодически получать позиционную информацию рассматриваемого транспортного средства, и обнаруживает текущую позицию рассматриваемого транспортного средства на основе полученной позиционной информации рассматриваемого транспортного средства, информации варьирования угла, полученной из гиродатчика, и скорости транспортного средства, полученной из датчика скорости транспортного средства. Помимо этого или альтернативно, устройство 110 обнаружения позиции рассматриваемого транспортного средства может обнаруживать позицию рассматриваемого транспортного средства с использованием известной технологии согласования с картой.
[0012] Картографическая база 120 данных сохраняет картографическую информацию. В картографической информации, сохраненной в картографической базе 120 данных, информация относительно формы дороги в каждой картографической координате записывается таким образом, что она ассоциирована с картографической координатой. Например, атрибуты относительно дуг, уклонов, перекрестков, развязок, узких дорог, прямых дорог, сооружений на обочине дороги и точек слияния записываются в картографической информации таким образом, что они ассоциированы с картографическими координатами.
[0013] Датчик 130 скорости транспортного средства измеряет частоту вращения приводной системы, к примеру, ведущего вала и определяет скорость движения (также в дальнейшем называемую "скоростью транспортного средства") рассматриваемого транспортного средства на основе измеренной частоты вращения. Информация скорости транспортного средства для рассматриваемого транспортного средства, определенная посредством датчика 130 скорости транспортного средства, выводится в устройство 180 управления. Датчик 190 угловой скорости рыскания, который присоединяется к соответствующему месту, к примеру, к месту в салоне транспортного средства, определяет угловую скорость рыскания (темп изменения угла вращения в направлении поворачивания) рассматриваемого транспортного средства, и обнаруженная информация угловой скорости рыскания рассматриваемого транспортного средства выводится в устройство 180 управления.
[0014] Датчик 140 дальности обнаруживает объект, существующий рядом с рассматриваемым транспортным средством. Датчик 140 дальности также вычисляет относительное расстояние и относительную скорость между рассматриваемым транспортным средством и объектом. Информация относительно объекта, обнаруженного посредством датчика 140 дальности, передается в устройство 180 управления. Примеры такого датчика 140 дальности включают в себя лазерный радар и радар миллиметрового диапазона.
[0015] Камера 150 захватывает изображения дороги и/или объекта рядом с рассматриваемым транспортным средством. В настоящем варианте осуществления, камера 150 захватывает изображения впереди рассматриваемого транспортного средства. Информация изображений, захватываемая посредством камеры 150, передается в устройство 180 управления.
[0016] Устройство 160 ввода представляет собой рабочий элемент, который может управляться водителем. В настоящем варианте осуществления, водитель может управлять устройством 160 ввода, чтобы за счет этого задавать включение/выключение управления автоматизированным или автономным движением. При управлении автоматизированным или автономным движением транспортного средства согласно настоящему варианту осуществления, когда едущее впереди транспортное средство присутствует впереди рассматриваемого транспортного средства, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется чтобы двигаться таким образом, что расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством поддерживается равным расстоянию между транспортными средствами, которое задается водителем, тогда как, когда едущее впереди транспортное средство не присутствует впереди рассматриваемого транспортного средства, выполняется управление скоростью, при котором рассматриваемое транспортное средство управляется чтобы двигаться со скоростью транспортного средства, которая задается водителем. В настоящем варианте осуществления, водитель может управлять устройством 160 ввода, чтобы за счет этого задавать заданную скорость транспортного средства (например, конкретное значение скорости) для рассматриваемого транспортного средства при управлении скоростью и заданное расстояние между транспортными средствами (например, любую из трех стадий из небольшого расстояния, среднего расстояния и большого расстояния) при управлении расстоянием между транспортными средствами.
[0017] Приводной механизм 170 включает в себя двигатель и/или электромотор (систему подачи мощности), тормоз (тормозную систему) и актуатор рулевого управления (систему рулевого управления) для управления рассматриваемым транспортным средством с возможностью двигаться автоматизированным или автономным способом. В настоящем варианте осуществления, при выполнении управления автоматизированным или автономным движением, которое описывается ниже, устройство 180 управления управляет работой приводного механизма 170.
[0018] Устройство 180 управления состоит из постоянного запоминающего устройства (ROM), которое сохраняет программы для управления движением рассматриваемого транспортного средства, центрального процессора (CPU), который выполняет программы, сохраненные в ROM, и оперативного запоминающего устройства (RAM), которое служит в качестве доступного устройства хранения данных. В качестве замены или в дополнение к CPU, может использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п. в качестве функциональной схемы.
[0019] Устройство 180 управления выполняет программы, сохраненные в ROM, с использованием CPU, чтобы за счет этого достигать следующих функций: функции получения информации рассматриваемого транспортного средства для получения информации рассматриваемого транспортного средства относительно состояния движения рассматриваемого транспортного средства; функции получения информации окружающих условий для получения информации окружающих условий относительно объектов и/или помех, существующих рядом с рассматриваемым транспортным средством; функции определения форм дорог для определения формы дороги для дороги, расположенной впереди рассматриваемого транспортного средства; функции задания расстояния между транспортными средствами для задания расстояния между транспортными средствами от едущего впереди транспортного средства; и функции управления движением (включающей в себя функцию автоматизированного или автономного следования) для управления движением рассматриваемого транспортного средства. Ниже описываются эти функции устройства 180 управления.
[0020] Устройство 180 управления использует функцию получения информации рассматриваемого транспортного средства для того, чтобы получать информацию рассматриваемого транспортного средства относительно состояния движения рассматриваемого транспортного средства. Например, устройство 180 управления может использовать функцию получения информации рассматриваемого транспортного средства для того, чтобы получать, в качестве информации рассматриваемого транспортного средства, позиционную информацию рассматриваемого транспортного средства из устройства 110 обнаружения позиции рассматриваемого транспортного средства, и информацию скорости транспортного средства для рассматриваемого транспортного средства из датчика 130 скорости транспортного средства.
[0021] Устройство 180 управления использует функцию получения информации окружающих условий для того, чтобы получать информацию окружающих условий относительно объектов и/или помех рядом с рассматриваемым транспортным средством. Например, устройство 180 управления может использовать функцию получения информации окружающих условий для того, чтобы получать присутствие или отсутствие окружающего транспортного средства, движущегося рядом с рассматриваемым транспортным средством, в качестве информации окружающих условий из датчика 140 дальности (примеры окружающего транспортного средства включают в себя едущее впереди транспортное средство, движущееся впереди в полосе движения рассматриваемого транспортного средства, и другое транспортное средство, движущееся в смежной полосе движения относительно полосы движения рассматриваемого транспортного средства). Когда окружающее транспортное средство присутствует рядом с рассматриваемым транспортным средством, устройство 180 управления может использовать функцию получения информации окружающих условий для того, чтобы получать информацию относительно позиции окружающего транспортного средства и относительного расстояния и относительной скорости между рассматриваемым транспортным средством и окружающим транспортным средством в качестве информации окружающих условий из датчика 140 дальности. Устройство 180 управления также может использовать функцию получения информации окружающих условий для того, чтобы вычислять абсолютную скорость транспортного средства для окружающего транспортного средства на основе скорости транспортного средства для рассматриваемого транспортного средства, полученной с использованием функции получения информации рассматриваемого транспортного средства, и относительной скорости между рассматриваемым транспортным средством и окружающим транспортным средством и получать вычисленную абсолютную скорость транспортного средства для окружающего транспортного средства в качестве информации окружающих условий.
[0022] Устройство 180 управления использует функцию определения форм дорог для того, чтобы определять то, представляет собой дорога, расположенная впереди рассматриваемого транспортного средства, или нет дорогу, имеющую конкретную форму. Ниже описываются подробности способа определения формы дороги с использованием функции определения форм дорог.
[0023] Устройство 180 управления использует функцию задания расстояния между транспортными средствами для того, чтобы задавать расстояние между транспортными средствами между едущим впереди транспортным средством и рассматриваемым транспортным средством. Когда водитель предварительно задает заданное расстояние между транспортными средствами от едущего впереди транспортного средства через устройство 160 ввода, функция задания расстояния между транспортными средствами служит для того, чтобы задавать расстояние между транспортными средствами между едущим впереди транспортным средством и рассматриваемым транспортным средством равным заданному расстоянию между транспортными средствами (например, любому значению из трех стадий из небольшого расстояния, среднего расстояния и большого расстояния). Когда едущее впереди транспортное средство становится отсутствующим во время управления расстоянием между транспортными средствами, функция задания расстояния между транспортными средствами служит для того, чтобы приостанавливать или отменять управление расстоянием между транспортными средствами до тех пор, пока едущее впереди транспортное средство или другое едущее впереди транспортное средство не появится снова. Ниже описываются подробности способа задания расстояния между транспортными средствами с использованием функции задания расстояния между транспортными средствами.
[0024] Устройство 180 управления использует функцию управления движением для того, чтобы управлять приводным механизмом 170, чтобы за счет этого выполнять управление автоматизированным или автономным движением, при котором все или часть движения рассматриваемого транспортного средства выполняется автоматизированным или автономным способом. Например, когда едущее впереди транспортное средство присутствует впереди рассматриваемого транспортного средства, функция управления движением в настоящем варианте осуществления служит для того, чтобы управлять работой приводного механизма 170, такого как двигатель и тормоз, чтобы за счет этого выполнять управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется чтобы двигаться таким образом, что оно отделяется от едущего впереди транспортного средства на расстояние между транспортными средствами, которое задается с использованием функции задания расстояния между транспортными средствами. Помимо этого или альтернативно, когда едущее впереди транспортное средство присутствует впереди рассматриваемого транспортного средства, функция управления движением служит для того, чтобы управлять работой приводного механизма 16, такого как двигатель, тормозной актуатор и актуатор рулевого управления, чтобы за счет этого выполнять управление автоматизированным или автономным следованием по пути (также в дальнейшем называемое "режимом движения со следованием по траектории"), при котором рассматриваемое транспортное средство управляется чтобы двигаться таким образом, что оно следует по траектории движения, по которой едущее впереди транспортное средство движется с расстоянием между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством, которое задается с использованием функции задания расстояния между транспортными средствами. Когда едущее впереди транспортное средство не присутствует впереди рассматриваемого транспортного средства, функция управления движением служит для того, чтобы управлять работой приводного механизма 170, такого как двигатель и тормоз, чтобы за счет этого выполнять управление движением на постоянной скорости, при котором рассматриваемое транспортное средство управляется чтобы двигаться на определенной заданной скорости транспортного средства, которая задается водителем.
[0025] Далее описывается процесс управления движением настоящего варианта осуществления. Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно настоящему варианту осуществления. Процесс управления движением, описанный ниже, выполняется посредством устройства 180 управления. Процесс управления движением, описанный ниже, начинается, когда переключатель зажигания или переключатель мощности включается, и многократно выполняется с предварительно определенным периодом (например, каждые 10 мс) до тех пор, пока переключатель зажигания или переключатель мощности не выключается.
[0026] Нижеприведенное описание основано на примерном окружении, в котором управление автоматизированным или автономным движением вводится (включается) водителем. Таким образом, в этом примерном окружении, водитель включает управление автоматизированным или автономным движением через устройство 160 ввода, и в силу этого, когда едущее впереди транспортное средство присутствует впереди рассматриваемого транспортного средства, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется чтобы двигаться таким образом, что оно отделяется от едущего впереди транспортного средства на расстояние между транспортными средствами, которое задается водителем, тогда как, когда едущее впереди транспортное средство не присутствует впереди рассматриваемого транспортного средства, выполняется управление движением на постоянной скорости, при котором рассматриваемое транспортное средство управляется чтобы двигаться на заданной скорости транспортного средства, которая задается водителем. Когда режим движения со следованием по траектории вводится (включается) водителем во время управления автоматизированным или автономным движением, управление движением со следованием по траектории выполняется с приоритетом по отношению к вышеуказанному управлению расстоянием между транспортными средствами и управлению движением на постоянной скорости, при условии, что устанавливается условие для управления движением со следованием по траектории.
[0027] На этапе S101, функция получения информации рассматриваемого транспортного средства устройства 180 управления в первую очередь служит для того, чтобы выполнять получение информации рассматриваемого транспортного средства относительно состояния движения рассматриваемого транспортного средства. Например, функция получения информации рассматриваемого транспортного средства может служить для того, чтобы получать, в качестве информации рассматриваемого транспортного средства, позиционную информацию рассматриваемого транспортного средства из устройства 110 обнаружения позиции рассматриваемого транспортного средства и информацию скорости транспортного средства для рассматриваемого транспортного средства из датчика 130 скорости транспортного средства.
[0028] На этапе S102, функция получения информации окружающих условий устройства 180 управления служит для того, чтобы выполнять получение информации окружающих условий относительно помех рядом с рассматриваемым транспортным средством. Например, функция получения информации окружающих условий может служить для того, чтобы получать присутствие или отсутствие окружающего транспортного средства, движущегося рядом с рассматриваемым транспортным средством, в качестве информации окружающих условий (примеры окружающего транспортного средства включают в себя едущее впереди транспортное средство, движущееся впереди в полосе движения рассматриваемого транспортного средства, и другое транспортное средство, движущееся в смежной полосе движения относительно полосы движения рассматриваемого транспортного средства). Когда окружающее транспортное средство присутствует рядом с рассматриваемым транспортным средством, функция получения информации окружающих условий может служить для того, чтобы получать информацию относительно относительной позиции окружающего транспортного средства, относительного расстояния и относительной скорости между рассматриваемым транспортным средством и окружающим транспортным средством и абсолютной скорости транспортного средства для окружающего транспортного средства в качестве информации окружающих условий.
[0029] На этапе S103, функция задания расстояния между транспортными средствами служит для того, чтобы определять то, присутствует или нет едущее впереди транспортное средство впереди рассматриваемого транспортного средства. Когда выполняется определение в отношении того, что едущее впереди транспортное средство не присутствует, процесс переходит к этапу S104. На этапе S104, выполняется управление движением на постоянной скорости, при котором рассматриваемое транспортное средство управляется чтобы двигаться на заданной скорости транспортного средства, которая задается водителем, поскольку на этапе S104 выполнено определение в отношении того, что едущее впереди транспортное средство не присутствует.
[0030] С другой стороны, когда на этапе S103 выполняется определение в отношении того, что едущее впереди транспортное средство присутствует, процесс переходит к этапу S105. На этапе S105, функция управления движением служит для того, чтобы определять то, выполняется или нет управление движением со следованием по траектории. В настоящем варианте осуществления, когда едущее впереди транспортное средство присутствует, водитель управляет устройством 160 ввода, чтобы за счет этого вводить (включать) режим движения со следованием по траектории, в котором рассматриваемое транспортное средство управляется чтобы двигаться в соответствии с траекторией движения едущего впереди транспортного средства, и в силу этого выполняется управление движением со следованием по траектории, а не управление расстоянием между транспортными средствами.
[0031] Когда режим движения со следованием по траектории не вводится на этапе S105, процесс переходит к этапу S106. На этапе S106, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется чтобы двигаться таким образом, что оно отделяется от едущего впереди транспортного средства на заданное расстояние между транспортными средствами (например, на любую из трех стадий из небольшого расстояния, среднего расстояния и большого расстояния), которое задается водителем. Если расстояние между транспортными средствами не задается водителем, например, задается максимальное расстояние D3 между транспортными средствами в качестве начального значения.
[0032] Когда режим движения со следованием по траектории вводится на этапе S105, процесс переходит к этапу S107, на котором оценивается траектория движения едущего впереди транспортного средства. Оценка траектории едущего впереди транспортного средства может включать в себя оценку траектории движения рассматриваемого транспортного средства из скорости транспортного средства для рассматриваемого транспортного средства, определенной посредством датчика 130 скорости транспортного средства, и угловой скорости рыскания рассматриваемого транспортного средства, определенной посредством датчика 190 угловой скорости рыскания, и вычисление и оценку траектории движения едущего впереди транспортного средства на основе оцененной траектории движения рассматриваемого транспортного средства и относительных позиций едущего впереди транспортного средства в продольном и поперечном направлениях, обнаруженных посредством датчика 140 дальности и камеры 150.
[0033] На этапе S108, функция определения форм дорог служит для того, чтобы выполнять процесс определения форм дорог для определения того, представляет собой дорога, расположенная впереди рассматриваемого транспортного средства, или нет дорогу с целевой формой, такую как дуга, перекресток, уклон или развязка (включающая в себя соединение дорог). В дальнейшем описывается процесс определения форм дорог, когда дорога с целевой формой представляет собой дугу. Функция получения информации рассматриваемого транспортного средства в первую очередь служит для того, чтобы получать позиционную информацию и информацию скорости транспортного средства для рассматриваемого транспортного средства. На основе позиции и скорости транспортного средства для рассматриваемого транспортного средства и картографической информации картографической базы 120 данных, получается радиус R кривизны дороги, расположенной впереди рассматриваемого транспортного средства. Затем функция определения форм дорог служит для того, чтобы определять то, меньше или нет радиус R кривизны дороги, расположенной впереди рассматриваемого транспортного средства, порогового значения Rth радиуса кривизны, которое предварительно задается. Когда радиус R кривизны дороги, расположенной впереди рассматриваемого транспортного средства, меньше порогового значения Rth радиуса кривизны, выполняется определение в отношении того, что дорога, расположенная впереди рассматриваемого транспортного средства, представляет собой дугу. С другой стороны, когда радиус R кривизны дороги, расположенной впереди рассматриваемого транспортного средства, не меньше порогового значения Rth радиуса кривизны, выполняется определение в отношении того, что дорога, расположенная впереди рассматриваемого транспортного средства, не представляет собой дугу. Для других дорог с целевой формой, таких как перекресток, уклон и развязка (включающая в себя соединение дорог), определение выполняется идентично на основе позиции и скорости транспортного средства для рассматриваемого транспортного средства и картографической информации картографической базы 120 данных.
[0034] На следующем этапе S109, выполняется определение в отношении того, присутствует или нет вышеописанная дорога с целевой формой, такая как дуга, перекресток, уклон или развязка (включающая в себя соединение дорог), на дороге, расположенной впереди рассматриваемого транспортного средства. Когда дорога с целевой формой не присутствует на дороге, расположенной впереди рассматриваемого транспортного средства, процесс переходит к этапу S110, на котором целевое расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством в режиме движения со следованием по траектории задается равным относительно небольшому значению из числа задаваемых значений, и управление движением затем выполняется на этапе S112. Например, когда задаваемые значения для целевого расстояния между транспортными средствами включают в себя, по меньшей мере, три расстояния из первого расстояния D1 между транспортными средствами, второго расстояния D2 между транспортными средствами, большего первого расстояния D1 между транспортными средствами, и третьего расстояния D3 между транспортными средствами, большего второго расстояния D2 между транспортными средствами (D1<D2<D3), целевое расстояние между транспортными средствами задается равным D2 в настоящем варианте осуществления. В альтернативном варианте осуществления, целевое расстояние между транспортными средствами может задаваться равным D1.
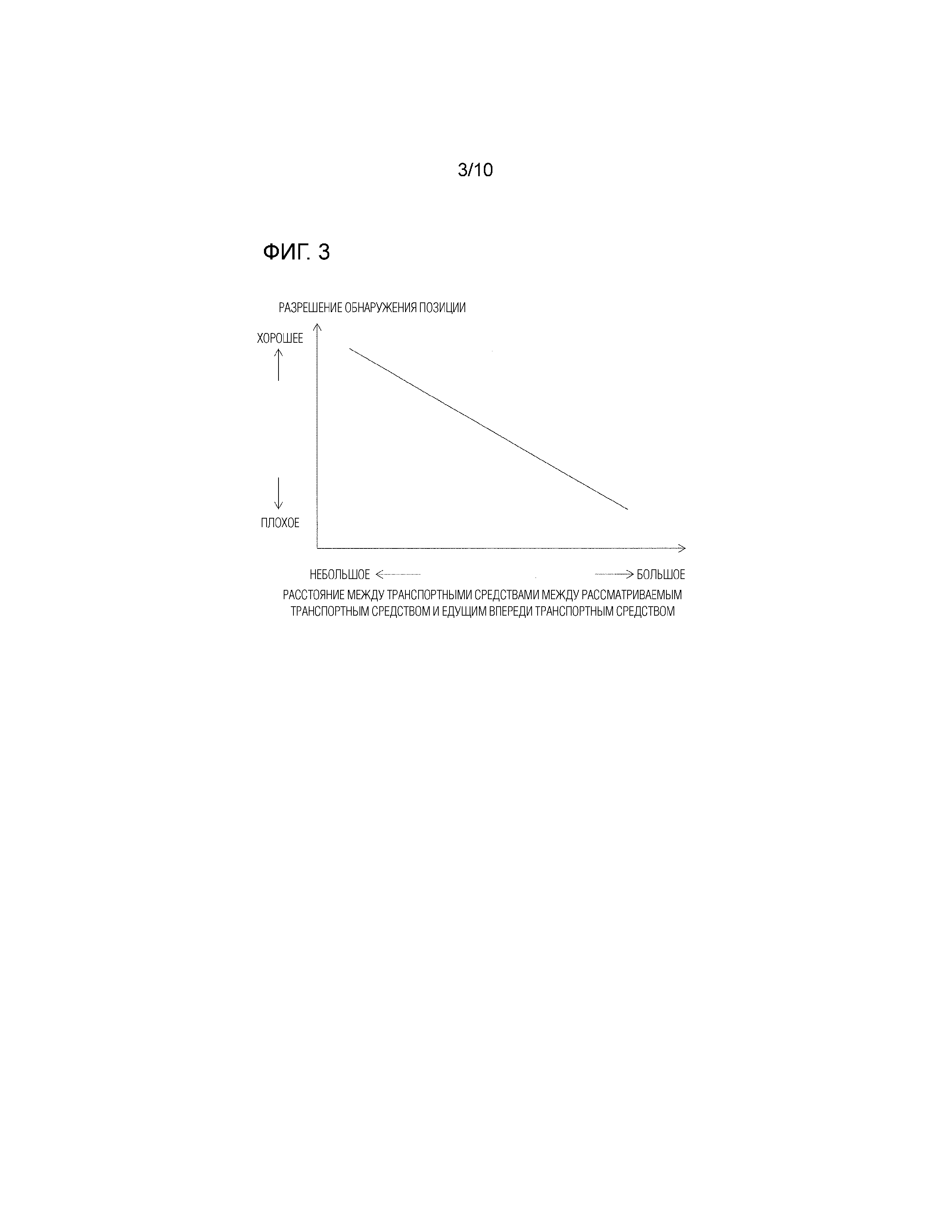
[0035] Фиг. 3 является графиком, иллюстрирующим взаимосвязь между расстоянием между транспортными средствами от рассматриваемого транспортного средства до едущего впереди транспортного средства и разрешением обнаружения позиции для траектории движения едущего впереди транспортного средства. Как описано выше, оценка траектории едущего впереди транспортного средства может включать в себя оценку траектории движения рассматриваемого транспортного средства из скорости транспортного средства для рассматриваемого транспортного средства, определенной посредством датчика 130 скорости транспортного средства, и угловой скорости рыскания рассматриваемого транспортного средства, определенной посредством датчика 190 угловой скорости рыскания, и вычисление и оценку траектории движения едущего впереди транспортного средства на основе оцененной траектории движения рассматриваемого транспортного средства и относительных позиций едущего впереди транспортного средства в продольном и поперечном направлениях, обнаруженных посредством датчика 140 дальности и камеры 150. Тем не менее, как проиллюстрировано на фиг. 3, разрешение обнаружения для относительных позиций едущего впереди транспортного средства в продольном и поперечном направлениях, обнаруженных посредством датчика 140 дальности и камеры 150, ухудшается по мере того, как расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством увеличивается. Ухудшение разрешения обнаружения для относительной позиции едущего впереди транспортного средства нарушает оцененную траекторию движения едущего впереди транспортного средства, и если управление рулением выполняется таким образом, что оцененная траектория движения едущего впереди транспортного средства используется в качестве целевой траектории движения без изменений, траектория движения рассматриваемого транспортного средства также может нарушаться. Следовательно, в настоящем варианте осуществления, когда режим движения со следованием по траектории изменяется из выключенного состояния во включенное состояние, целевое расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством задается равным относительно небольшому значению из числа задаваемых значений.
[0036] Фиг. 4 является видом сверху, иллюстрирующим пример окружения, в котором режим движения со следованием по траектории рассматриваемого транспортного средства переходит во включенное состояние. Когда режим движения со следованием по траектории вводится в состоянии, в котором рассматриваемое транспортное средство V1 движется в текущей позиции P1, и едущее впереди транспортное средство V2 движется в текущей позиции P2, расположенной перед текущей позицией P1, на расстояние D3 между транспортными средствами (этапы S105-S110), целевое расстояние между транспортными средствами задается от текущего расстояния D3 до целевого расстояния D2 между транспортными средствами, меньшего D3, чтобы выполнять управление движением, при котором рассматриваемое транспортное средство управляется чтобы приближаться вплотную к едущему впереди транспортному средству. Через эту операцию, во время t1, рассматриваемое транспортное средство V1 расположено в позиции P1', в то время как едущее впереди транспортное средство V2 расположено в позиции P2', и расстояние между транспортными средствами между ними уменьшается до целевого расстояния D2 между транспортными средствами. Это позволяет повышать разрешение обнаружения для относительных позиций едущего впереди транспортного средства в продольном и поперечном направлениях, обнаруженных посредством датчика 140 дальности и камеры 150, как проиллюстрировано на фиг. 3, и возмущение в оцененной траектории движения едущего впереди транспортного средства в силу этого подавляется. Как результат, возмущения в траектории движения рассматриваемого транспортного средства могут подавляться.
[0037] Снова ссылаясь на этап S109 по фиг. 2, когда дорога с целевой формой присутствует на дороге, расположенной впереди рассматриваемого транспортного средства, процесс переходит к этапу S111, на котором целевое расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством в режиме движения со следованием по траектории задается равным относительно небольшому значению из числа задаваемых значений, и управление движением затем выполняется на этапе S112. Например, когда задаваемые значения для целевого расстояния между транспортными средствами включают в себя, по меньшей мере, три расстояния из первого расстояния D1 между транспортными средствами, второго расстояния D2 между транспортными средствами, большего первого расстояния D1 между транспортными средствами, и третьего расстояния D3 между транспортными средствами, большего второго расстояния D2 между транспортными средствами (D1<D2<D3), целевое расстояние между транспортными средствами задается равным D1 в настоящем варианте осуществления. В альтернативном варианте осуществления, целевое расстояние между транспортными средствами может задаваться равным D2.
[0038] Фиг. 5A является видом сверху, иллюстрирующим пример окружения начала движения по дуге во включенном состоянии режима движения со следованием по траектории рассматриваемого транспортного средства. Рассматриваемое транспортное средство V1 движется в текущей позиции P1, и едущее впереди транспортное средство V2 движется в текущей позиции P2, расположенной впереди в полосе движения рассматриваемого транспортного средства, на расстояние D3 между транспортными средствами. Помимо этого, другое транспортное средство (едущее впереди в смежной полосе движения транспортное средство V3) движется в правосторонней смежной полосе движения относительно полосы движения рассматриваемого транспортного средства. Если транспортные средства движутся по дуге при поддержании расстояния D3 между транспортными средствами, может возникать состояние по фиг. 5B. Фиг. 5B является видом сверху, иллюстрирующим пример (Сравнительный Пример) окружения движения по дуге при поддержании расстояния D3 между транспортными средствами из окружения, проиллюстрированного на фиг. 5A. Таким образом, едущее впереди в смежной полосе движения транспортное средство V3 въезжает в область облучения датчика 140 дальности для обнаружения едущего впереди транспортного средства относительно рассматриваемого транспортного средства и/или в поле зрения камеры 150 таким образом, что едущее впереди транспортное средство въезжает в слепую зону едущего впереди в смежной полосе движения транспортного средства, чтобы вызывать период времени, в течение которого относительные позиции едущего впереди транспортного средства в продольном и поперечном направлениях не могут обнаруживаться. Как результат, траектория движения едущего впереди транспортного средства не может оцениваться в течение этого периода.
[0039] С другой стороны, фиг. 5C является видом сверху, иллюстрирующим пример (Пример) окружения движения по дуге посредством задания расстояния между транспортными средствами равным D1 (<D3) в окружении, проиллюстрированном на фиг. 5A. Следует признавать, что дуга присутствует впереди рассматриваемого транспортного средства в окружении по фиг. 5A; в силу этого, когда целевое расстояние между транспортными средствами уменьшается с D3 до D1 перед движением по дуге, целевое расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством уменьшается до D1 во время движения по дуге, как проиллюстрировано на фиг. 5C, так что едущее впереди в смежной полосе движения транспортное средство V3 не въезжает в область облучения датчика 140 дальности и в поле зрения камеры 150, и относительные позиции едущего впереди транспортного средства в продольном и поперечном направлениях могут непрерывно обнаруживаться. Как результат, управление движением со следованием по траектории для рассматриваемого транспортного средства может плавно выполняться, чтобы обеспечивать возможность траектории движения рассматриваемого транспортного средства быть плавной. Обстановка на такой общей дугой является идентичной на дороге, имеющей небольшой радиус кривизны, такой как развязка или соединение дорог скоростной автомагистрали.
[0040] Фиг. 6A является видом сверху, иллюстрирующим пример (Сравнительный Пример) окружения движения через перекресток с конструкцией здания при поддержании расстояния D3 между транспортными средствами во включенном состоянии режима движения со следованием по траектории рассматриваемого транспортного средства. На перекрестке и т.п., зачастую могут существовать конструкции здания или другие объекты, создающие помехи области облучения датчика 140 дальности и/или полю зрения камеры 150. Соответственно, если целевое расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством задается равным большому значению, к примеру, D3, как проиллюстрировано на фиг. 6A, то конструкция здания может входить в область облучения датчика 140 дальности для обнаружения едущего впереди транспортного средства относительно рассматриваемого транспортного средства и/или в поле зрения камеры 150 таким образом, что едущее впереди транспортное средство въезжает в слепую зону конструкции здания, чтобы вызывать период времени, в течение которого относительные позиции едущего впереди транспортного средства в продольном и поперечном направлениях не могут обнаруживаться. Как результат, траектория движения едущего впереди транспортного средства не может оцениваться в течение этого периода.
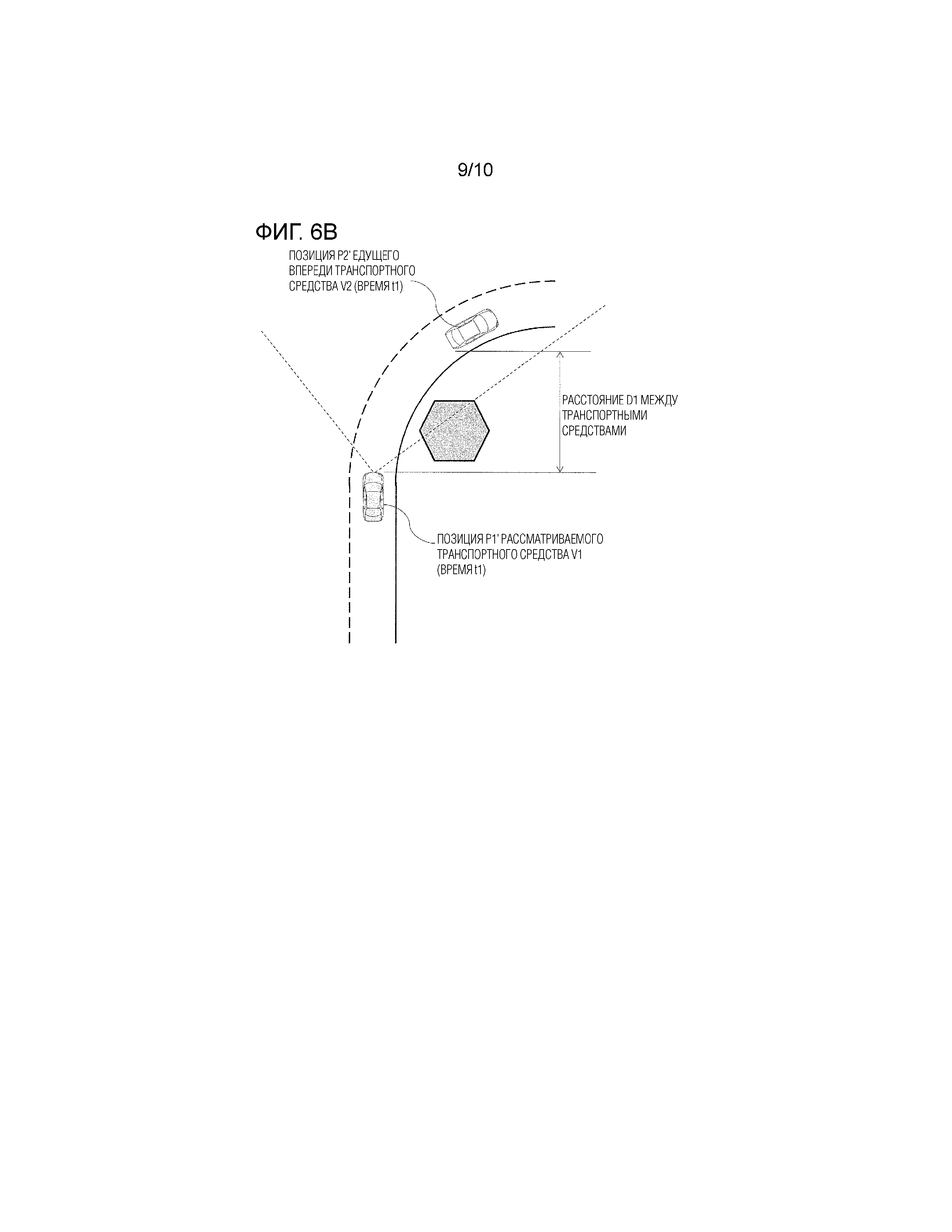
[0041] С другой стороны, фиг. 6B является видом сверху, иллюстрирующим пример (Пример) окружения движения через перекресток с конструкцией здания посредством задания расстояния между транспортными средствами равным D1 (<D3) при въезде на перекресток во включенном состоянии режима движения со следованием по траектории рассматриваемого транспортного средства. Следует признавать, что перекресток присутствует впереди рассматриваемого транспортного средства в окружении по фиг. 6A; в силу этого, когда целевое расстояние между транспортными средствами уменьшается с D3 до D1 перед движением через перекресток, целевое расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством уменьшается до D1 во время движения через перекресток, как проиллюстрировано на фиг. 6B, так что конструкция здания не входит в область облучения датчика 140 дальности и в поле зрения камеры 150, и относительные позиции едущего впереди транспортного средства в продольном и поперечном направлениях могут непрерывно обнаруживаться. Как результат, управление движением со следованием по траектории для рассматриваемого транспортного средства может плавно выполняться, чтобы обеспечивать возможность траектории движения рассматриваемого транспортного средства быть плавной.
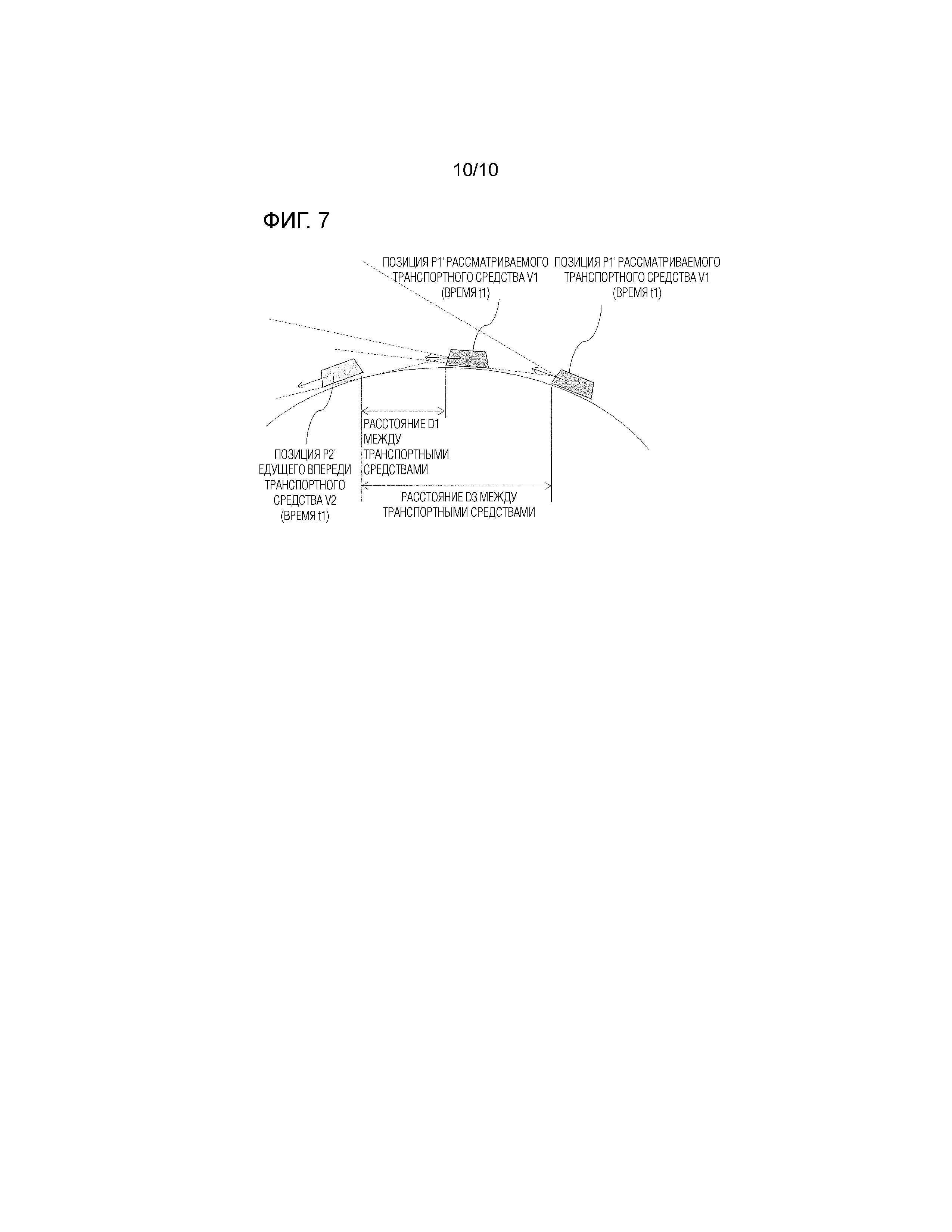
[0042] Фиг. 7 является видом сверху, иллюстрирующим пример (Сравнительный Пример) окружения движения под уклон при поддержании расстояния D3 между транспортными средствами во включенном состоянии режима движения со следованием по траектории рассматриваемого транспортного средства и пример (Пример) окружения движения под уклон посредством задания расстояния между транспортными средствами равным D1 (<D3) при въезде на уклон. Область облучения датчика 140 дальности для обнаружения едущего впереди транспортного средства относительно рассматриваемого транспортного средства и поле зрения камеры 150 распространяются не только в горизонтальном направлении, но также и в вертикальном направлении. Соответственно, если целевое расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством задается равным большому значению, к примеру, D3 в переходной области от подъема к спуску или в переходной области от спуска к подъему, как проиллюстрировано на фиг. 7, то едущее впереди транспортное средство V2 может выезжать за пределы области облучения датчика 140 дальности для обнаружения едущего впереди транспортного средства относительно рассматриваемого транспортного средства и/или поля зрения камеры 150, чтобы за счет этого вызывать период времени, в течение которого относительные позиции едущего впереди транспортного средства в продольном и поперечном направлениях не могут обнаруживаться. Как результат, траектория движения едущего впереди транспортного средства не может оцениваться в течение этого периода.
[0043] В этом контексте, следует признавать, что уклон присутствует впереди рассматриваемого транспортного средства перед окружением, проиллюстрированным на фиг. 7; в силу этого, когда целевое расстояние между транспортными средствами уменьшается с D3 до D1 перед движением под уклон, целевое расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством уменьшается до D1 во время движения под уклон, как проиллюстрировано на фиг. 7, так что едущее впереди транспортное средство V2 может захватываться в области облучения датчика 140 дальности и/или в поле зрения камеры 150, и относительные позиции едущего впереди транспортного средства в продольном и поперечном направлениях могут непрерывно обнаруживаться. Как результат, управление движением со следованием по траектории для рассматриваемого транспортного средства может плавно выполняться, чтобы обеспечивать возможность траектории движения рассматриваемого транспортного средства быть плавной.
[0044] Как описано выше, в настоящем варианте осуществления, когда режим движения со следованием по траектории изменяется из выключенного состояния во включенное состояние, целевое расстояние между транспортными средствами между рассматриваемым транспортным средством V1 и едущим впереди транспортным средством, V2 задается равным относительно небольшому значению D1 или D2 из числа задаваемых значений, и в силу этого рассматриваемое транспортное средство приближается относительно вплотную к едущему впереди транспортному средству. Это обеспечивает возможность простого обнаружения едущего впереди транспортного средства.
[0045] Кроме того, в настоящем варианте осуществления, когда режим движения со следованием по траектории находится во включенном состоянии, и рассматриваемое транспортное средство V1 приближается к дуге, перекрестку, уклону или развязке, целевое расстояние между транспортными средствами задается равным относительно еще более меньшему значению D1 или D2, чем текущее заданное значение. Через эту операцию, другое транспортное средство или конструкция здания не входит в область облучения датчика 140 дальности и в поле зрения камеры 150, и едущее впереди транспортное средство не выезжает за пределы области облучения и поля зрения, так что относительные позиции едущего впереди транспортного средства в продольном и поперечном направлениях могут непрерывно обнаруживаться. Как результат, управление движением со следованием по траектории для рассматриваемого транспортного средства может плавно выполняться, чтобы обеспечивать возможность траектории движения рассматриваемого транспортного средства быть плавной.
[0046] Вышеописанное устройство 180 управления соответствует контроллеру настоящего изобретения.
Описание номеров ссылок
[0047] 100 - оборудование управления движением
110 - устройство обнаружения позиции рассматриваемого транспортного средства
120 - картографическая база данных
130 - датчик скорости транспортного средства
140 - датчик дальности
150 - камера
160 - устройство ввода
170 - приводной механизм
180 - устройство управления
190 – датчик угловой скорости рыскания.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ управления движением транспортного средства и устройство управления движением
Способ управления движением транспортного средства и устройство управления движением

