Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления движением и к оборудованию управления движением, которые управляют движением транспортного средства.
Уровень техники
[0002] Известно устройство для предупреждения в отношении степени потенциального риска, которое выдает предупреждение в соответствии с уровнем вероятности того, что рассматриваемое транспортное средство и другое транспортное средство, движущееся в смежной полосе движения, приближаются вплотную друг к другу, когда рассматриваемое транспортное средство и другое транспортное средство движутся рядом по дуге (патентный документ 1: JP2007-148964A).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2007-148964A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее при управлении автоматизированным или автономным движением может возникать такая проблема, что когда рассматриваемое транспортное средство и другое транспортное средство движутся рядом по дуге, водитель может испытывать некомфортное ощущение.
[0005] Задача, решаемая посредством настоящего изобретения, заключается в том, чтобы предоставлять способ управления движением и оборудование управления движением, которые надлежащим образом управляют движением рассматриваемого транспортного средства таким образом, чтобы исключать некомфортное ощущение, возникающее у водителя, когда рассматриваемое транспортное средство движется по дуге или узкой дороге при управлении автоматизированным или автономным движением.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему следующим образом. Когда, во время управления автоматизированным или автономным движением рассматриваемого транспортного средства, секция дороги, включающая в себя, по меньшей мере, одно из дуги и узкой дороги, присутствует впереди рассматриваемого транспортного средства, и другое транспортное средство движется в смежной полосе движения относительно полосы движения для рассматриваемого транспортного средства, рассматриваемое транспортное средство управляется, чтобы двигаться с расстоянием между транспортными средствами, которое задается таким образом, что рассматриваемое транспортное средство и другое транспортное средство не движутся рядом, когда рассматриваемое транспортное средство движется в упомянутой секции дороги.
Преимущества изобретения
[0007] Согласно настоящему изобретению, можно предотвращать движение рядом рассматриваемого транспортного средства и другого транспортного средства, когда рассматриваемое транспортное средство движется по дуге или узкой дороге, и в силу этого может исключаться некомфортное ощущение, возникающее у водителя во время управления автоматизированным или автономным движением.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей оборудование управления движением согласно варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением, выполняемый в устройстве управления по фиг. 1.
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей вложенную процедуру процесса определения форм дорог по фиг. 2.
Фиг. 4 является графиком (картой управления), иллюстрирующим пример взаимосвязи между величиной варьирования поперечной позиции другого транспортного средства (едущего впереди в смежной полосе движения транспортного средства) и пороговым значением радиуса кривизны.
Фиг. 5 является видом сверху, иллюстрирующим окружение, в котором рассматриваемое транспортное средство движется по дуге, когда едущее впереди транспортное средство не присутствует.
Фиг. 6 является видом сверху для описания способа управления движением для рассматриваемого транспортного средства в окружении, проиллюстрированном на фиг. 5.
Фиг. 7 является видом сверху, иллюстрирующим другое окружение, в котором рассматриваемое транспортное средство движется по дуге, когда едущее впереди транспортное средство не присутствует.
Фиг. 8 является видом сверху для описания способа управления движением для рассматриваемого транспортного средства в окружении, проиллюстрированном на фиг. 7.
Фиг. 9 является видом сверху, иллюстрирующим окружение, в котором рассматриваемое транспортное средство движется по дуге, когда едущее впереди транспортное средство присутствует.
Фиг. 10 является видом сверху для описания способа управления движением для рассматриваемого транспортного средства в окружении, проиллюстрированном на фиг. 9.
Фиг. 11 является видом сверху, иллюстрирующим другое окружение, в котором рассматриваемое транспортное средство движется по дуге, когда едущее впереди транспортное средство присутствует.
Фиг. 12 является видом сверху для описания способа управления движением для рассматриваемого транспортного средства в окружении, проиллюстрированном на фиг. 11.
Фиг. 13 является видом сверху, иллюстрирующим еще одно другое окружение, в котором рассматриваемое транспортное средство движется по дуге, когда едущее впереди транспортное средство присутствует.
Фиг. 14 является видом сверху для описания способа управления движением для рассматриваемого транспортного средства в окружении, проиллюстрированном на фиг. 13.
Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно другому варианту осуществления настоящего изобретения.
Фиг. 16 является блок-схемой последовательности операций способа, иллюстрирующей вложенную процедуру процесса определения форм дорог по фиг. 15.
Фиг. 17 является графиком (картой управления), иллюстрирующим пример взаимосвязи между отношением ширины транспортного средства для едущего впереди в смежной полосе движения транспортного средства к ширине дороги для дороги, расположенной впереди, и пороговым значением для узкой дороги.
Режим(ы) осуществления изобретения
[0009] В дальнейшем в этом документе, описываются оборудование и способ для управления движением транспортного средства согласно варианту осуществления настоящего изобретения со ссылкой на чертежи. В этом варианте осуществления, настоящее изобретение описывается посредством примерной иллюстрации оборудования управления движением, оснащенного в транспортном средстве.
[0010] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию оборудования 100 управления движением согласно настоящему варианту осуществления. Как проиллюстрировано на фиг. 1, оборудование 100 управления движением согласно настоящему варианту осуществления включает в себя устройство 110 обнаружения позиции рассматриваемого транспортного средства, картографическую базу 120 данных, датчик 130 скорости транспортного средства, датчик 140 дальности, камеру 150, устройство 160 ввода, приводной механизм 170 и устройство 180 управления. Эти компоненты соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0011] Устройство 110 обнаружения позиции рассматриваемого транспортного средства, которое включает в себя GPS-модуль, обнаруживает радиоволны, передаваемые из множества спутников связи, чтобы периодически получать позиционную информацию рассматриваемого транспортного средства, и обнаруживает текущую позицию рассматриваемого транспортного средства на основе полученной позиционной информации рассматриваемого транспортного средства, информации варьирования угла, полученной из гиродатчика, и скорости транспортного средства, полученной из датчика 130 скорости транспортного средства. Помимо этого или альтернативно, устройство 110 обнаружения позиции рассматриваемого транспортного средства может обнаруживать позицию рассматриваемого транспортного средства с использованием известной технологии сопоставления с картой.
[0012] Картографическая база 120 данных сохраняет картографическую информацию. Картографическая информация, сохраненная в картографической базе 120 данных, включает в себя информацию атрибутов относительно радиуса R кривизны и ширины W дороги для дороги в каждой картографической координате, сооружений на обочине дороги и точек слияния.
[0013] Датчик 130 скорости транспортного средства измеряет частоту вращения приводной системы, к примеру, ведущего вала и определяет скорость движения (также в дальнейшем называемую "скоростью транспортного средства") рассматриваемого транспортного средства на основе измеренной частоты вращения. Информация скорости транспортного средства для рассматриваемого транспортного средства, определенная посредством датчика 130 скорости транспортного средства, выводится в устройство 180 управления.
[0014] Датчик 140 дальности обнаруживает помеху, существующую рядом с рассматриваемым транспортным средством. Датчик 140 дальности также вычисляет относительное расстояние и относительную скорость между рассматриваемым транспортным средством и помехой. Информация относительно помехи, обнаруженной посредством датчика 140 дальности, передается в устройство 180 управления. Примеры такого датчика 140 дальности включают в себя лазерный радар и радар миллиметрового диапазона.
[0015] Камера 150 захватывает изображения дороги и/или помехи рядом с рассматриваемым транспортным средством. Информация изображений, захватываемая посредством камеры 150, передается в устройство 180 управления.
[0016] Устройство 160 ввода представляет собой рабочий элемент, который может управляться водителем. В настоящем варианте осуществления, водитель может управлять устройством 160 ввода, чтобы за счет этого задавать включение/выключение управления автоматизированным или автономным движением транспортного средства. При управлении автоматизированным или автономным движением транспортного средства согласно настоящему варианту осуществления, когда едущее впереди транспортное средство присутствует впереди рассматриваемого транспортного средства, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется, чтобы двигаться таким образом, что расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством поддерживается равным расстоянию между транспортными средствами, которое задается водителем, тогда как, когда едущее впереди транспортное средство не присутствует впереди рассматриваемого транспортного средства, выполняется управление скоростью, при котором рассматриваемое транспортное средство управляется, чтобы двигаться со скоростью транспортного средства, которая задается водителем. В настоящем варианте осуществления, водитель может управлять устройством 160 ввода, чтобы за счет этого задавать заданную скорость транспортного средства (например, конкретное значение скорости) рассматриваемого транспортного средства при управлении скоростью и заданное расстояние между транспортными средствами (например, любую из трех стадий из небольшого расстояния, среднего расстояния и большого расстояния) при управлении расстоянием между транспортными средствами.
[0017] Приводной механизм 170 включает в себя двигатель и/или электромотор (систему подачи мощности), тормоз (тормозную систему) и актуатор рулевого управления (систему рулевого управления) для управления рассматриваемым транспортным средством с возможностью двигаться автоматизированным или автономным способом. В настоящем варианте осуществления, при выполнении управления автоматизированным или автономным движением, которое описывается ниже, устройство 180 управления управляет работой приводного механизма 170.
[0018] Устройство 180 управления состоит из постоянного запоминающего устройства (ROM), которое сохраняет программы для управления движением рассматриваемого транспортного средства, центрального процессора (CPU), который выполняет программы, сохраненные в ROM, и оперативного запоминающего устройства (RAM), которое служит в качестве доступного устройства хранения данных. В качестве замены или в дополнение к CPU, может использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п. в качестве функциональной схемы.
[0019] Устройство 180 управления выполняет программы, сохраненные в ROM, с использованием CPU, чтобы за счет этого достигать следующих функций: функции получения информации рассматриваемого транспортного средства для получения информации рассматриваемого транспортного средства относительно состояния движения рассматриваемого транспортного средства; функции получения информации окружающих условий для получения информации окружающих условий относительно помех, существующих рядом с рассматриваемым транспортным средством; функции указания окружающих транспортных средств для указания того, представляет собой окружающее транспортное средство, едущее впереди в смежной полосе движения транспортное средство (другое транспортное средство, движущееся в смежной полосе движения) или едущее впереди транспортное средство (другое транспортное средство, движущееся впереди рассматриваемого транспортного средства в идентичной полосе движения); функции определения форм дорог для определения формы дороги для дороги, расположенной впереди рассматриваемого транспортного средства; функции определения опережения для определения того, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед дугой; функции задания расстояния между транспортными средствами для задания расстояния между транспортными средствами от едущего впереди транспортного средства; и функции управления движением для управления движением рассматриваемого транспортного средства. Ниже описываются эти функции устройства 180 управления. Следует отметить, что "опережение" означает ситуацию, в которой транспортное средство опережает другое транспортное средство, движущееся в другой полосе движения, из позиции позади другого транспортного средства до позиции впереди другого транспортного средства без смены полосы движения, и должно различаться от "обгона" со сменой полосы движения.
[0020] Устройство 180 управления использует функцию получения информации рассматриваемого транспортного средства для того, чтобы получать информацию рассматриваемого транспортного средства относительно состояния движения рассматриваемого транспортного средства. Например, устройство 180 управления может использовать функцию получения информации рассматриваемого транспортного средства для того, чтобы получать, в качестве информации рассматриваемого транспортного средства, позиционную информацию рассматриваемого транспортного средства из устройства 110 обнаружения позиции рассматриваемого транспортного средства, и информацию скорости транспортного средства для рассматриваемого транспортного средства из датчика 130 скорости транспортного средства.
[0021] Устройство 180 управления использует функцию получения информации окружающих условий для того, чтобы получать информацию окружающих условий относительно помех рядом с рассматриваемым транспортным средством. Например, устройство 180 управления может использовать функцию получения информации окружающих условий для того, чтобы получать присутствие или отсутствие окружающего транспортного средства, движущегося рядом с рассматриваемым транспортным средством, в качестве информации окружающих условий из датчика 140 дальности. Когда окружающее транспортное средство присутствует рядом с рассматриваемым транспортным средством, устройство 180 управления может использовать функцию получения информации окружающих условий для того, чтобы получать информацию относительно позиции окружающего транспортного средства и относительного расстояния и относительной скорости между рассматриваемым транспортным средством и окружающего транспортного средства в качестве информации окружающих условий из датчика 140 дальности. Устройство 180 управления также может использовать функцию получения информации окружающих условий для того, чтобы вычислять абсолютную скорость транспортного средства для окружающего транспортного средства на основе скорости транспортного средства для рассматриваемого транспортного средства, полученной с использованием функции получения информации рассматриваемого транспортного средства, и относительной скорости между рассматриваемым транспортным средством и окружающим транспортным средством и получать вычисленную абсолютную скорость транспортного средства для окружающего транспортного средства в качестве информации окружающих условий.
[0022] Устройство 180 управления использует функцию указания окружающих транспортных средств для того, чтобы указывать то, представляет собой другое транспортное средство, присутствующее впереди рассматриваемого транспортного средства, едущее впереди в смежной полосе движения транспортное средство или едущее впереди транспортное средство, на основе информации окружающих условий, полученной с использованием функции получения информации окружающих условий. Например, устройство 180 управления использует функцию указания окружающих транспортных средств для того, чтобы получать изображение, захваченное впереди рассматриваемого транспортного средства, из камеры 150 и обнаруживать разделительные линии, расположенные впереди рассматриваемого транспортного средства. Затем устройство 180 управления использует функцию указания окружающих транспортных средств для того, чтобы указывать полосу движения, в которой движется окружающее транспортное средство, движущееся впереди рассматриваемого транспортного средства, на основе позиционной информации окружающего транспортного средства, включенной в информацию окружающих условий, и разделительных линий дороги, расположенной впереди рассматриваемого транспортного средства. Например, когда окружающее транспортное средство, движущееся впереди рассматриваемого транспортного средства, движется в смежной полосе движения, которая является смежной с полосой движения рассматриваемого транспортного средства, функция указания окружающих транспортных средств может служить для того, чтобы указывать это окружающее транспортное средство в качестве едущего впереди в смежной полосе движения транспортного средства. Когда окружающее транспортное средство, движущееся впереди рассматриваемого транспортного средства, движется в полосе движения рассматриваемого транспортного средства, функция указания окружающих транспортных средств может служить для того, чтобы указывать это окружающее транспортное средство в качестве едущего впереди транспортного средства.
[0023] Устройство 180 управления использует функцию определения форм дорог для того, чтобы определять то, представляет собой дорога, расположенная впереди рассматриваемого транспортного средства, или нет дугу. Ниже описываются подробности способа определения формы дороги с использованием функции определения форм дорог.
[0024] Устройство 180 управления использует функцию определения опережения для того, чтобы определять то, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед дугой (в позиции ближе к рассматриваемому транспортному средству, чем начальная точка дуги). Ниже описываются подробности способа определения опережения с использованием функции определения опережения.
[0025] Устройство 180 управления использует функцию задания расстояния между транспортными средствами, чтобы задавать расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством или едущим впереди транспортным средством на основе результата определения, полученного с использованием функции определения опережения. Ниже также описываются подробности способа задания расстояния между транспортными средствами с использованием функции задания расстояния между транспортными средствами.
[0026] Устройство 180 управления использует функцию управления движением для того, чтобы управлять приводным механизмом 170, чтобы за счет этого выполнять управление автоматизированным или автономным движением, при котором все или часть движения рассматриваемого транспортного средства выполняется автоматизированным или автономным способом. Например, когда едущее впереди транспортное средство присутствует впереди рассматриваемого транспортного средства, функция управления движением в настоящем варианте осуществления служит для того, чтобы управлять работой приводного механизма 170, такого как двигатель, и тормозить автоматизированным или автономным способом, чтобы за счет этого выполнять управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется, чтобы двигаться таким образом, что расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством или между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством поддерживается равным расстоянию между транспортными средствами, которое задается с использованием функции задания расстояния между транспортными средствами. С другой стороны, когда едущее впереди транспортное средство не присутствует впереди рассматриваемого транспортного средства, функция управления движением в настоящем варианте осуществления служит для того, чтобы управлять работой приводного механизма 170, такого как двигатель, и тормозить автоматизированным или автономным способом, чтобы за счет этого выполнять управление скоростью, при котором рассматриваемое транспортное средство управляется, чтобы двигаться на определенной скорости транспортного средства, которая задается водителем.
[0027] Далее описывается процесс управления движением настоящего варианта осуществления. Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно настоящему варианту осуществления. Процесс управления движением, описанный ниже, выполняется посредством устройства 180 управления. Процесс управления движением, описанный ниже, начинается, когда переключатель зажигания или переключатель мощности включается, и многократно выполняется с предварительно определенным периодом (например, каждые 10 мс) до тех пор, пока переключатель зажигания или переключатель мощности не выключается.
[0028] Нижеприведенное описание основано на примерном окружении, в котором управление автоматизированным или автономным движением вводится (включается) водителем. Таким образом, в этом примерном окружении, водитель включает управление автоматизированным или автономным движением через устройство 160 ввода, и в силу этого, когда едущее впереди транспортное средство присутствует впереди рассматриваемого транспортного средства, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется, чтобы двигаться автоматизированным или автономным способом таким образом, что расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством поддерживается равным расстоянию между транспортными средствами, которое задается водителем, тогда как, когда едущее впереди транспортное средство не присутствует впереди рассматриваемого транспортного средства, выполняется управление скоростью, при котором рассматриваемое транспортное средство управляется, чтобы двигаться автоматизированным или автономным способом на заданной скорости транспортного средства, которая задается водителем.
[0029] На этапе S101, функция получения информации рассматриваемого транспортного средства устройства 180 управления в первую очередь служит для того, чтобы выполнять получение информации рассматриваемого транспортного средства относительно состояния движения рассматриваемого транспортного средства. Например, функция получения информации рассматриваемого транспортного средства может служить для того, чтобы получать, в качестве информации рассматриваемого транспортного средства, позиционную информацию рассматриваемого транспортного средства из устройства 110 обнаружения позиции рассматриваемого транспортного средства и информацию скорости транспортного средства для рассматриваемого транспортного средства из датчика 130 скорости транспортного средства.
[0030] На этапе S102, функция получения информации окружающих условий устройства 180 управления служит для того, чтобы выполнять получение информации окружающих условий относительно помех рядом с рассматриваемым транспортным средством. Например, функция получения информации окружающих условий может служить для того, чтобы получать присутствие или отсутствие окружающего транспортного средства, движущегося рядом с рассматриваемым транспортным средством, в качестве информации окружающих условий. Когда окружающее транспортное средство присутствует рядом с рассматриваемым транспортным средством, функция получения информации окружающих условий может служить для того, чтобы получать информацию относительно относительной позиции окружающего транспортного средства, относительного расстояния и относительной скорости между рассматриваемым транспортным средством и окружающим транспортным средством и абсолютной скорости транспортного средства для окружающего транспортного средства в качестве информации окружающих условий.
[0031] На этапе S103, функция указания окружающих транспортных средств служит для того, чтобы указывать едущее впереди в смежной полосе движения транспортное средство и едущее впереди транспортное средство. В частности, функция указания окружающих транспортных средств служит для того, чтобы получать изображение, захваченное впереди рассматриваемого транспортного средства, из камеры 150 и обнаруживать разделительные линии, расположенные впереди рассматриваемого транспортного средства. Затем функция указания окружающих транспортных средств служит для того, чтобы определять то, движется окружающее транспортное средство в полосе движения рассматриваемого транспортного средства или в смежной полосе движения, смежной с полосой движения рассматриваемого транспортного средства, на основе позиционной информации окружающего транспортного средства, полученной на этапе S102, и информации относительно разделительных линий, расположенных впереди рассматриваемого транспортного средства, и в силу этого указывать окружающее транспортное средство, движущееся впереди рассматриваемого транспортного средства, в качестве едущего впереди транспортного средства, которое движется в полосе движения рассматриваемого транспортного средства, или едущего впереди в смежной полосе движения транспортного средства, которое движется в смежной полосе движения.
[0032] На этапе S104, функция определения опережения служит для того, чтобы выполнять определение в отношении того, присутствует или нет едущее впереди в смежной полосе движения транспортное средство, на основе результата, полученного на этапе S103. Когда едущее впереди в смежной полосе движения транспортное средство не присутствует, процесс переходит к этапу S117. С другой стороны, когда едущее впереди в смежной полосе движения транспортное средство присутствует, процесс переходит к этапу S105.
[0033] На этапе S105, функция определения форм дорог служит для того, чтобы выполнять процесс определения форм дорог для определения того, представляет собой дорога, расположенная впереди рассматриваемого транспортного средства, или нет дугу. Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей вложенную процедуру процесса определения форм дорог, выполняемого на этапе S105. Ниже описывается процесс определения форм дорог со ссылкой на фиг. 3.
[0034] На этапе S201, функция определения форм дорог в первую очередь служит для того, чтобы получать радиус R кривизны дороги, расположенной впереди рассматриваемого транспортного средства. Например, по мере того, как позиция рассматриваемого транспортного средства обнаруживается на этапе S101 по фиг. 2, функция определения форм дорог может служить для того, чтобы обращаться к картографической базе 120 данных и в силу этого получать радиус R кривизны дороги, расположенной впереди рассматриваемого транспортного средства.
[0035] На этапе S202, функция определения форм дорог служит для того, чтобы вычислять величину A варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства в течение определенного периода на основе информации окружающих условий, полученной на этапе S102. В настоящем варианте осуществления, процесс управления движением, проиллюстрированный на фиг. 2, многократно выполняется, и информация относительно поперечной позиции (позиции в направлении ширины транспортного средства) едущего впереди в смежной полосе движения транспортного средства, из информации окружающих условий, полученной на этапе S102, сохраняется в качестве данных временных рядов в RAM устройства 180 управления. Функция определения форм дорог может служить для того, чтобы вычислять величину A варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства в течение определенного периода на основе данных временных рядов поперечной позиции едущего впереди в смежной полосе движения транспортного средства в течение последнего определенного периода.
[0036] На этапе S203, функция определения форм дорог служит для того, чтобы задавать пороговое значение Rth радиуса кривизны на основе величины A варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства, вычисленной на этапе S202. Здесь, фиг. 4 является графиком (картой управления), иллюстрирующим пример взаимосвязи между величиной A варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства и пороговым значением Rth радиуса кривизны. Как проиллюстрировано на фиг. 4, когда величина A варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства меньше A1, функция определения форм дорог служит для того, чтобы задавать пороговое значение Rth радиуса кривизны равным R2. Когда величина A варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства V2 составляет A1 или больше и меньше A2, функция определения форм дорог служит для того, чтобы задавать пороговое значение Rth радиуса кривизны таким образом, что пороговое значение Rth радиуса кривизны увеличивается пропорционально величине A варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства в пределах диапазона от R2 до R1. Когда величина A варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства составляет A2 или больше, функция определения форм дорог служит для того, чтобы задавать пороговое значение Rth радиуса кривизны равным R1. A1, A2, R1 и R2 не ограничены конкретным образом и могут надлежащим образом задаваться посредством экспериментов и т.п. Таким образом, пороговое значение Rth радиуса кривизны задается на основе величины A варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства. Это обусловлено тем, что радиус R кривизны дороги, расположенной впереди рассматриваемого транспортного средства, который получается со ссылкой на картографическую базу 120 данных, является просто значением в картографической базе 120 данных, и в настоящем варианте осуществления, степень флуктуации в поперечном направлении, когда транспортное средство фактически движется, суммируется со значением в картографической базе 120 данных. Это обеспечивает возможность задания порогового значения Rth радиуса кривизны большим по мере того, как величина A варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства (степень флуктуации в поперечном направлении) увеличивается. Таким образом, частота, с которой дорога даже с идентичным радиусом R кривизны определяется в качестве дуги, становится высокой по мере того, как величина A варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства (степень флуктуации в поперечном направлении) увеличивается.
[0037] На этапе S204, функция определения форм дорог служит для того, чтобы выполнять определение в отношении того, меньше или нет радиус R кривизны дороги, расположенной впереди рассматриваемого транспортного средства, который получается на этапе S201, порогового значения Rth радиуса кривизны, которое задается на этапе S203. Когда радиус R кривизны дороги, расположенной впереди рассматриваемого транспортного средства, меньше порогового значения Rth радиуса кривизны, процесс переходит к этапу S205, на котором функция определения форм дорог служит для того, чтобы определять то, что дорога, расположенная впереди рассматриваемого транспортного средства, представляет собой дугу. С другой стороны, когда радиус R кривизны дороги, расположенной впереди рассматриваемого транспортного средства, не меньше порогового значения Rth радиуса кривизны, процесс переходит к этапу S206, на котором функция определения форм дорог служит для того, чтобы определять то, что дорога, расположенная впереди рассматриваемого транспортного средства, не представляет собой дугу.
[0038] При таком определении, выполненном на этапе S205, что дорога, расположенная впереди рассматриваемого транспортного средства, представляет собой дугу, выполняется этап S207, на котором функция определения форм дорог служит для того, чтобы вычислять расстояние от текущей позиции рассматриваемого транспортного средства до точки начала дуги (начальной точки дуги при просмотре из рассматриваемого транспортного средства) дуги, расположенной впереди рассматриваемого транспортного средства. После того, как вышеуказанный процесс определения форм дорог, проиллюстрированный на фиг. 3, завершается, процесс переходит к этапу S106, проиллюстрированному на фиг. 2.
[0039] На этапе S106 по фиг. 2, функция определения опережения служит для того, чтобы выполнять определение в отношении того, представляет собой дорога, расположенная впереди рассматриваемого транспортного средства, или нет дугу, на основе результата определения, полученного в процессе определения форм дорог этапа S105. В процессе определения форм дорог, проиллюстрированном на фиг. 3, когда выполняется определение в отношении того, что дорога, расположенная впереди рассматриваемого транспортного средства, представляет собой дугу (этап S205), процесс переходит к этапу S107, тогда как, когда выполняется определение в отношении того, что дорога, расположенная впереди рассматриваемого транспортного средства, не представляет собой дугу (этап S206), процесс переходит к этапу S117.
[0040] При определении того, что дорога, расположенная впереди рассматриваемого транспортного средства, представляет собой дугу, выполняется этап S107, на котором функция определения опережения служит для того, чтобы оценивать позицию завершения опережения на основе позиционной информации и информации скорости транспортного средства для едущего впереди в смежной полосе движения транспортного средства, указываемой на этапе S103, и позиционной информации и информации скорости транспортного средства для рассматриваемого транспортного средства, полученной на этапе S101. Позиция завершения опережения представляет собой позицию, в которой рассматриваемое транспортное средство опережает едущее впереди в смежной полосе движения транспортное средство, если рассматриваемое транспортное средство и едущее впереди в смежной полосе движения транспортное средство движутся на соответствующих текущих скоростях транспортного средства.
[0041] На этапе S108, функция определения опережения служит для того, чтобы определять то, присутствует или нет едущее впереди транспортное средство впереди рассматриваемого транспортного средства. Когда выполняется определение в отношении того, что едущее впереди транспортное средство не присутствует, процесс переходит к этапу S109, тогда как, когда выполняется определение в отношении того, что едущее впереди транспортное средство присутствует, процесс переходит к этапу S113.
[0042] При определении того, что едущее впереди транспортное средство не присутствует, выполняется этап S109, на котором функция определения опережения служит для того, чтобы определять то, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство на текущей скорости движения рассматриваемого транспортного средства перед дугой, расположенной впереди. В частности, как проиллюстрировано на фиг. 5, функция определения опережения служит для того, чтобы определять то, расположена или нет позиция PT завершения опережения, оцененная на этапе S107, перед точкой PC начала дуги (начальной точкой дуги), расположенной впереди рассматриваемого транспортного средства V1 (расположена или нет позиция PT завершения опережения, оцененная на этапе S107, в позиции ближе к рассматриваемому транспортному средству V1, чем точка PC начала дуги (начальная точка дуги), расположенная впереди рассматриваемого транспортного средства V1). Позиция PT завершения опережения означает точку, в которой рассматриваемое транспортное средство V1 опережает едущее впереди в смежной полосе движения транспортное средство V2, и, по меньшей мере, задняя концевая часть рассматриваемого транспортного средства V1 расположена перед передней концевой частью едущего впереди в смежной полосе движения транспортного средства V2. Когда позиция PT завершения опережения расположена перед точкой PC начала дуги, которая расположена впереди рассматриваемого транспортного средства V1, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 может опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой, расположенной впереди. Если позиция PT завершения опережения не может оцениваться вследствие меньшей скорости транспортного средства для рассматриваемого транспортного средства V1, чем скорость транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2, может выполняться определение в отношении того, что рассматриваемое транспортное средство V1 не может опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой, расположенной впереди.
[0043] При определении того, что рассматриваемое транспортное средство может опережать едущее впереди в смежной полосе движения транспортное средство перед дугой, расположенной впереди, выполняется этап S110. На этапе S110, функция управления движением служит для того, чтобы выполнять управление скоростью, при котором рассматриваемое транспортное средство управляется, чтобы двигаться на заданной скорости транспортного средства, которая задается водителем. После этого, процесс управления движением, проиллюстрированный на фиг. 2, возвращается к этапу S101.
[0044] Снова ссылаясь на этап S109, при определении того, что рассматриваемое транспортное средство не может опережать едущее впереди в смежной полосе движения транспортное средство перед дугой, расположенной впереди, когда рассматриваемое транспортное средство и едущее впереди в смежной полосе движения транспортное средство движутся на соответствующих текущих скоростях транспортного средства, выполняется этап S111. На этапе S111, функция задания расстояния между транспортными средствами служит для того, чтобы задавать расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством равным предварительно определенному расстоянию D1. После этого, на этапе S112, функция управления движением служит для того, чтобы выполнять управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется, чтобы двигаться таким образом, что расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством поддерживается равным расстоянию D1 между транспортными средствами, заданному на этапе S111. Таким образом, функция управления движением служит для того, чтобы управлять рассматриваемым транспортным средством с возможностью двигаться таким образом, что рассматриваемое транспортное средство отделено от едущего впереди в смежной полосе движения транспортного средства на расстояние D1 между транспортными средствами в направлении движения рассматриваемого транспортного средства. D1 не ограничено конкретным образом и может надлежащим образом задаваться посредством экспериментов и т.п. Это расстояние D1 между транспортными средствами представляет собой расстояние между транспортными средствами, при котором, по меньшей мере, рассматриваемое транспортное средство и едущее впереди в смежной полосе движения транспортное средство (другое транспортное средство) не движутся рядом. Такая ситуация, что рассматриваемое транспортное средство и едущее впереди в смежной полосе движения транспортное средство (другое транспортное средство) не движутся рядом, означает ситуацию, в которой когда едущее впереди в смежной полосе движения транспортное средство (другое транспортное средство) движется впереди, передняя концевая часть рассматриваемого транспортного средства расположена позади задней концевой части едущего впереди в смежной полосе движения транспортного средства, или ситуацию, в которой когда рассматриваемое транспортное средство движется впереди, передняя концевая часть едущего впереди в смежной полосе движения транспортного средства расположена позади задней концевой части рассматриваемого транспортного средства. Соответственно, расстоянию D1 между транспортными средствами между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством, вероятно, не должно быть фиксированным расстоянием и может варьироваться в диапазоне D1≥0. Помимо этого или альтернативно, например, расстояние D1 между транспортными средствами от едущего впереди в смежной полосе движения транспортного средства может быть меньше расстояния D2 или D3 между транспортными средствами от едущего впереди транспортного средства, которое описывается ниже, либо также может превышать расстояние D2 или D3 между транспортными средствами от едущего впереди транспортного средства.
[0045] Фиг. 5 является видом сверху, примерно иллюстрирующим окружение, в котором рассматриваемое транспортное средство V1 движется по дуге, когда едущее впереди транспортное средство не присутствует, и фиг. 6 является видом сверху для описания способа управления движением для рассматриваемого транспортного средства V1 в окружении, проиллюстрированном на фиг. 5. В примерном окружении, проиллюстрированном на фиг. 5, текущая позиция рассматриваемого транспортного средства V1 представляет собой P1, и текущая позиция едущего впереди в смежной полосе движения транспортного средства V2, движущегося в смежной полосе движения, представляет собой P2. Во-первых, позиция PT завершения опережения, в которой рассматриваемое транспортное средство V1 опережает едущее впереди в смежной полосе движения транспортное средство V2, оценивается (этап S107) на основе текущей скорости транспортного средства для рассматриваемого транспортного средства V1, текущей скорости транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2, относительного расстояния между рассматриваемым транспортным средством V1 и едущим впереди в смежной полосе движения транспортным средством V2 и т.д. В примерном окружении, проиллюстрированном на фиг. 5, едущее впереди транспортное средство не присутствует впереди в полосе движения для рассматриваемого транспортного средства V1 (этап S108="Нет"); в силу этого выполняется определение в отношении того, может или нет рассматриваемое транспортное средство V1 опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой, расположенной впереди рассматриваемого транспортного средства V1 (этап S109). В примерном окружении, проиллюстрированном на фиг. 5, позиция PT завершения опережения расположена впереди точки PC начала дуги (в позиции дальше от рассматриваемого транспортного средства); в силу этого выполняется определение в отношении того, что рассматриваемое транспортное средство V1 не может опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой, расположенной впереди рассматриваемого транспортного средства V1 (этап S109="Нет"). Соответственно, как проиллюстрировано на фиг. 6, расстояние между транспортными средствами между рассматриваемым транспортным средством V1 и едущим впереди в смежной полосе движения транспортным средством V2, которые движутся по дуге (расстояние между передней концевой частью рассматриваемого транспортного средства V1 и задней концевой частью едущего впереди в смежной полосе движения транспортного средства V2) задается равным D1 (этап S111), и выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство V1 управляется, чтобы двигаться таким образом, что рассматриваемое транспортное средство V1 отделено от едущего впереди в смежной полосе движения транспортного средства V2 на расстояние D1 между транспортными средствами (этап S112). Это обеспечивает возможность рассматриваемому транспортному средству V1 двигаться с расстоянием D1 между транспортными средствами от едущего впереди в смежной полосе движения транспортного средства V2, как проиллюстрировано на фиг. 6, и в силу этого можно не допускать движения рассматриваемого транспортного средства V1 рядом с едущим впереди в смежной полосе движения транспортным средством V2 при движении по дуге.
[0046] С другой стороны, фиг. 7 является видом сверху, примерно иллюстрирующим другое окружение, в котором рассматриваемое транспортное средство V1 движется по дуге, когда едущее впереди транспортное средство не присутствует впереди в полосе движения для рассматриваемого транспортного средства V1, и фиг. 8 является видом сверху для описания способа управления движением для рассматриваемого транспортного средства V1 в окружении, проиллюстрированном на фиг. 7. Также в примерном окружении, проиллюстрированном на фиг. 7, аналогично примеру, проиллюстрированному на фиг. 5, позиция PT завершения опережения, в которой рассматриваемое транспортное средство V1 опережает едущее впереди в смежной полосе движения транспортное средство V2, оценивается (этап S107) на основе текущей скорости транспортного средства для рассматриваемого транспортного средства V1, текущей скорости транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2, относительного расстояния между рассматриваемым транспортным средством V1 и едущим впереди в смежной полосе движения транспортным средством V2 и т.д. В примерном окружении, проиллюстрированном на фиг. 7, едущее впереди транспортное средство не присутствует впереди в полосе движения для рассматриваемого транспортного средства V1 (этап S108="Нет"); в силу этого выполняется определение в отношении того, может или нет рассматриваемое транспортное средство V1 опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой, расположенной впереди рассматриваемого транспортного средства V1 (этап S109). В примерном окружении, проиллюстрированном на фиг. 7, позиция PT завершения опережения расположена перед точкой PC начала дуги (в позиции ближе к рассматриваемому транспортному средству V1); в силу этого выполняется определение в отношении того, что рассматриваемое транспортное средство V1 может опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой (этап S109="Да"). Соответственно, выполняется управление скоростью, при котором рассматриваемое транспортное средство V1 управляется, чтобы двигаться на заданной скорости транспортного средства, которая задается водителем (этап S110). Таким образом, как проиллюстрировано на фиг. 8, выполняется управление скоростью, при котором рассматриваемое транспортное средство V1 управляется, чтобы двигаться на заданной скорости транспортного средства, которая задается водителем, и рассматриваемое транспортное средство V1 в силу этого может управляться с возможностью опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой и двигаться по дуге без движения рядом с едущим впереди в смежной полосе движения транспортным средством V2 при движении по дуге.
[0047] В настоящем варианте осуществления, после того, как управление расстоянием между транспортными средствами выполняется на этапе S112, процесс возвращается к этапу S101. Следовательно, после того, как рассматриваемое транспортное средство V1 движется по дуге, как проиллюстрировано на фиг. 6, например, даже когда едущее впереди в смежной полосе движения транспортное средство V2 присутствует (этап S104="Да"), но когда дорога, расположенная впереди, не представляет собой дугу (этап S106="Нет"), процесс переходит к этапу S117. После этого, на этапе S117, устройство 180 управления выполняет определение в отношении того, присутствует или нет едущее впереди транспортное средство, и когда выполняется определение в отношении того, что едущее впереди транспортное средство не присутствует, процесс переходит к этапу S110. На этапе S110, выполняется управление скоростью, при котором рассматриваемое транспортное средство V1 управляется, чтобы двигаться на заданной скорости транспортного средства, которая задается водителем. Таким образом, в примерном окружении, проиллюстрированном на фиг. 6, например, после того, как рассматриваемое транспортное средство V1 движется по дуге, управление расстоянием между транспортными средствами для управления рассматриваемым транспортным средством V1 с возможностью двигаться с расстоянием D1 между транспортными средствами от едущего впереди в смежной полосе движения транспортного средства V2 отменяется, и управление скоростью выполняется для того, чтобы управлять рассматриваемым транспортным средством V1 с возможностью двигаться на заданной скорости транспортного средства, которая задается водителем. Это обеспечивает возможность рассматриваемому транспортному средству V1 двигаться рядом с едущим впереди в смежной полосе движения транспортным средством V2 после движения по дуге, как проиллюстрировано на фиг. 6.
[0048] Снова ссылаясь на этап S108 по фиг. 2, когда выполняется определение в отношении того, что едущее впереди транспортное средство присутствует впереди в полосе движения для рассматриваемого транспортного средства, процесс переходит к этапу S113. На этапе S113, функция определения опережения служит для того, чтобы определять то, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед дугой при поддержании расстояния D2 между транспортными средствами, которое предварительно задается между рассматриваемым транспортным средством и едущим впереди транспортным средством. В настоящем варианте осуществления, когда едущее впереди транспортное средство присутствует, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется, чтобы двигаться с заданным расстоянием D2 между транспортными средствами, которое задается пользователем от едущего впереди транспортного средства, и текущая скорость транспортного средства для рассматриваемого транспортного средства задается равной скорости транспортного средства при движении, чтобы ехать за едущим впереди транспортным средством с расстоянием D2 между транспортными средствами. Функция определения опережения в силу этого служит для того, чтобы оценивать позицию PT завершения опережения на основе текущей скорости транспортного средства для рассматриваемого транспортного средства, скорости транспортного средства для едущего впереди в смежной полосе движения транспортного средства и относительного расстояния между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством при поддержании расстояния между транспортными средствами от едущего впереди транспортного средства равным расстоянию D2 между транспортными средствами, которое предварительно задается. Затем функция определения опережения служит для того, чтобы определять то, расположена или нет оцененная позиция PT завершения опережения перед точкой PC начала дуги, и в силу этого определять то, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед дугой при поддержании расстояния между транспортными средствами от едущего впереди транспортного средства равным расстоянию D2 между транспортными средствами, которое предварительно задается. Когда рассматриваемое транспортное средство может опережать едущее впереди в смежной полосе движения транспортное средство перед дугой при поддержании расстояния между транспортными средствами от едущего впереди транспортного средства равным расстоянию D2 между транспортными средствами, которое предварительно задается, процесс переходит к этапу S114, на котором функция задания расстояния между транспортными средствами служит для того, чтобы поддерживать заданное расстояние D2 между транспортными средствами для рассматриваемого транспортного средства. С другой стороны, когда рассматриваемое транспортное средство не может опережать едущее впереди в смежной полосе движения транспортное средство перед дугой при поддержании расстояния между транспортными средствами от едущего впереди транспортного средства равным расстоянию D2 между транспортными средствами, которое предварительно задается, процесс переходит к этапу S115.
[0049] На этапе S115, функция определения опережения служит для того, чтобы определять то, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед дугой при изменении расстояния между транспортными средствами между едущим впереди транспортным средством и рассматриваемым транспортным средством на расстояние D3 между транспортными средствами, меньшее заданного расстояния D2 между транспортными средствами, которое задается пользователем. Например, функция определения опережения служит для того, чтобы оценивать позицию PT завершения опережения, когда расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством задается равным расстоянию D3 между транспортными средствами, на основе скорости транспортного средства для рассматриваемого транспортного средства при управлении с возможностью двигаться таким образом, что оно едет за едущим впереди транспортным средством с расстоянием D3 между транспортными средствами (<D2), скорости транспортного средства для едущего впереди в смежной полосе движения транспортного средства и относительного расстояния между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством. Затем функция определения опережения служит для того, чтобы определять то, расположена или нет оцененная позиция PT завершения опережения перед точкой PC начала дуги, и в силу этого определять то, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед дугой с расстоянием D3 между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством. Когда рассматриваемое транспортное средство может опережать едущее впереди в смежной полосе движения транспортное средство перед дугой с расстоянием D3 между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством, процесс переходит к этапу S116, на котором функция задания расстояния между транспортными средствами служит для того, чтобы изменять расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством на D3. После этого, на этапе S112, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется, чтобы двигаться с расстоянием D3 между транспортными средствами от едущего впереди транспортного средства. С другой стороны, когда рассматриваемое транспортное средство не может опережать едущее впереди в смежной полосе движения транспортное средство перед дугой даже с расстоянием D3 между транспортными средствами между рассматриваемым транспортным средством и едущим впереди транспортным средством, процесс переходит к этапу S111, на котором расстояние между транспортными средствами от едущего впереди в смежной полосе движения транспортного средства задается равным D1. После этого, на этапе S112, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется, чтобы двигаться с расстоянием D1 между транспортными средствами от едущего впереди в смежной полосе движения транспортного средства.
[0050] Здесь, фиг. 9 является видом сверху, примерно иллюстрирующим окружение, в котором рассматриваемое транспортное средство V1 движется по дуге, когда едущее впереди транспортное средство присутствует V3, и фиг. 10 является видом сверху для описания способа управления движением для рассматриваемого транспортного средства V1 в окружении, проиллюстрированном на фиг. 9. В примерном окружении, проиллюстрированном на фиг. 9, текущая позиция рассматриваемого транспортного средства V1 представляет собой P1, текущая позиция едущего впереди в смежной полосе движения транспортного средства V2 представляет собой P2, и текущая позиция едущего впереди транспортного средства V3 представляет собой P3. В этом окружении, управление расстоянием между транспортными средствами выполняется таким образом, что рассматриваемое транспортное средство V1 управляется, чтобы двигаться с заданным расстоянием D2 между транспортными средствами, которое предварительно задается водителем, от едущего впереди транспортного средства V3. В этом случае, позиция PT завершения опережения, в которой рассматриваемое транспортное средство V1 опережает едущее впереди в смежной полосе движения транспортное средство V2, оценивается (этап S107) на основе текущей скорости транспортного средства для рассматриваемого транспортного средства V1, текущей скорости транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2, относительных позиций рассматриваемого транспортного средства V1 и едущего впереди в смежной полосе движения транспортного средства V2 и т.д. Эта позиция PT завершения опережения представляет собой позицию, в которой рассматриваемое транспортное средство V1 завершает опережение едущего впереди в смежной полосе движения транспортного средства V2 при управлении с возможностью двигаться с расстоянием D2 между транспортными средствами от едущего впереди транспортного средства V3. В примерном окружении, проиллюстрированном на фиг. 9, едущее впереди транспортное средство V3 присутствует впереди рассматриваемого транспортного средства V1 (этап S108="Да"); в силу этого выполняется определение в отношении того, может или нет рассматриваемое транспортное средство V1 опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой, расположенной впереди, при поддержании расстояния между транспортными средствами от едущего впереди транспортного средства V3 равным D2 (этап S113). В примерном окружении, проиллюстрированном на фиг. 9, позиция PT завершения опережения расположена перед точкой PC начала дуги (в позиции ближе к рассматриваемому транспортному средству V1); в силу этого выполняется определение в отношении того, что рассматриваемое транспортное средство V1 может опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой, расположенной впереди рассматриваемого транспортного средства V1, при поддержании расстояния между транспортными средствами от едущего впереди транспортного средства V3 равным D2 (этап S113="Да"). Соответственно, расстояние между транспортными средствами от едущего впереди транспортного средства V3 поддерживается равным заданному расстоянию D2 между транспортными средствами (этап S114), и выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство V1 управляется, чтобы двигаться таким образом, что рассматриваемое транспортное средство V1 отделено от едущего впереди транспортного средства V3 на расстояние D2 между транспортными средствами (этап S112). Таким образом, как проиллюстрировано на фиг. 10, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство V1 управляется, чтобы двигаться таким образом, что рассматриваемое транспортное средство V1 отделено от едущего впереди транспортного средства V3 на расстояние D2 между транспортными средствами, и рассматриваемое транспортное средство V1 в силу этого может управляться с возможностью опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой и двигаться по дуге без движения рядом с едущим впереди в смежной полосе движения транспортным средством V2 при движении по дуге.
[0051] Фиг. 11 является видом сверху, примерно иллюстрирующим другое окружение, в котором рассматриваемое транспортное средство V1 движется по дуге, когда едущее впереди транспортное средство присутствует V3, и фиг. 12 является видом сверху для описания способа управления движением для рассматриваемого транспортного средства в окружении, проиллюстрированном на фиг. 11. В примерном окружении, проиллюстрированном на фиг. 11, аналогично примерному окружению, проиллюстрированному на фиг. 9, управление расстоянием между транспортными средствами выполняется таким образом, что рассматриваемое транспортное средство V1 управляется, чтобы двигаться с заданным расстоянием D2 между транспортными средствами, которое предварительно задается водителем, от едущего впереди транспортного средства V3. Тем не менее в примерном окружении, проиллюстрированном на фиг. 11, позиция PT2 завершения опережения, в которой рассматриваемое транспортное средство V1 опережает едущее впереди в смежной полосе движения транспортное средство V2, когда рассматриваемое транспортное средство V1 управляется, чтобы двигаться с расстоянием D2 между транспортными средствами от едущего впереди транспортного средства V3, расположена впереди точки PC начала дуги (в позиции дальше от рассматриваемого транспортного средства V1); в силу этого выполняется определение в отношении того, что рассматриваемое транспортное средство V1 не может опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой, расположенной впереди рассматриваемого транспортного средства V1, когда расстояние между транспортными средствами от едущего впереди транспортного средства V3 задается равным заданному расстоянию D2 между транспортными средствами (этап S113="Нет"). Соответственно, выполняется определение в отношении того, может или нет рассматриваемое транспортное средство V1 опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой, расположенной впереди рассматриваемого транспортного средства V1, когда расстояние между транспортными средствами от едущего впереди транспортного средства V3 задается равным D3, меньшему расстояния D2 между транспортными средствами (этап S115). В примерном окружении, проиллюстрированном на фиг. 11, позиция PT завершения опережения расположена перед точкой PC начала дуги (в позиции ближе к рассматриваемому транспортному средству V1), когда расстояние между транспортными средствами от едущего впереди транспортного средства V3 задается равным D3 (<D2); в силу этого выполняется определение в отношении того, что рассматриваемое транспортное средство V1 может опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой, расположенной впереди рассматриваемого транспортного средства V1, когда расстояние между транспортными средствами от едущего впереди транспортного средства V3 задается равным D3 (этап S115="Да"). Расстояние между транспортными средствами от едущего впереди транспортного средства V3 в силу этого изменяется на расстояние D3 (этап S116), и выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство V1 управляется, чтобы двигаться таким образом, что рассматриваемое транспортное средство V1 отделено от едущего впереди транспортного средства V3 на расстояние D3 между транспортными средствами (этап S112). Таким образом, как проиллюстрировано на фиг. 12, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство V1 управляется, чтобы опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой и двигаться таким образом, что рассматриваемое транспортное средство V1 отделено от едущего впереди транспортного средства V3 на расстояние D3 между транспортными средствами при движении по дуге, и рассматриваемое транспортное средство V1 в силу этого может управляться с возможностью двигаться по дуге без движения рядом с едущим впереди в смежной полосе движения транспортным средством V2 при движении по дуге.
[0052] Фиг. 13 является видом сверху, примерно иллюстрирующим еще одно другое окружение, в котором рассматриваемое транспортное средство V1 движется по дуге, когда едущее впереди транспортное средство V3 присутствует впереди в полосе движения для рассматриваемого транспортного средства V1, и фиг. 14 является видом сверху для описания способа управления движением для рассматриваемого транспортного средства в окружении, проиллюстрированном на фиг. 13. В примерном окружении, проиллюстрированном на фиг. 13, как в случае, если расстояние между транспортными средствами от едущего впереди транспортного средства V3 задается равным заданному расстоянию D2 между транспортными средствами, так и в случае, если расстояние между транспортными средствами от едущего впереди транспортного средства V3 задается равным D3, меньшему заданного расстояния D2 между транспортными средствами, выполняется определение в отношении того, что рассматриваемое транспортное средство V1 не может опережать едущее впереди в смежной полосе движения транспортное средство V2 перед дугой, расположенной впереди (этап S113="Нет", этап S115="Нет"). Расстояние между транспортными средствами от едущего впереди в смежной полосе движения транспортного средства V2 в силу этого задается равным D1. После этого, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство V1 управляется, чтобы двигаться таким образом, что рассматриваемое транспортное средство V1 отделено от едущего впереди в смежной полосе движения транспортного средства V2 на расстояние D1 между транспортными средствами (этап S112). Таким образом, как проиллюстрировано на фиг. 14, выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство V1 управляется, чтобы двигаться таким образом, что рассматриваемое транспортное средство V1 отделено от едущего впереди в смежной полосе движения транспортного средства V2 на расстояние D1 между транспортными средствами при движении по дуге, и рассматриваемое транспортное средство V1 в силу этого может управляться с возможностью двигаться по дуге без движения рядом с едущим впереди в смежной полосе движения транспортным средством V2 при движении по дуге.
[0053] Как описано выше, в настоящем варианте осуществления, во время управления автоматизированным или автономным движением рассматриваемого транспортного средства, когда дуга присутствует впереди рассматриваемого транспортного средства, и едущее впереди в смежной полосе движения транспортное средство (другое транспортное средство) присутствует сбоку от рассматриваемого транспортного средства, к примеру, в смежной полосе движения относительно полосы движения для рассматриваемого транспортного средства, выполняется определение в отношении того, должны или нет рассматриваемое транспортное средство и едущее впереди в смежной полосе движения транспортное средство двигаться рядом по дуге, расположенной впереди. Затем, когда выполняется определение в отношении того, что рассматриваемое транспортное средство и едущее впереди в смежной полосе движения транспортное средство должны двигаться рядом по дуге, выполняется управление расстоянием между транспортными средствами, при котором расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством в направлении движения рассматриваемого транспортного средства задается равным предварительно определенному расстоянию D1 (≥0), и рассматриваемое транспортное средство управляется, чтобы двигаться с заданным расстоянием между транспортными средствами. Это обеспечивает возможность не допускать движения рассматриваемого транспортного средства и едущего впереди в смежной полосе движения транспортного средства рядом по дуге; в силу этого во время движения по дуге, при котором флуктуация транспортных средств является относительно большой, можно исключать некомфортное ощущение, которое возникает у водителя по мере того, как рассматриваемое транспортное средство и находящееся в смежной полосе движения транспортное средство движутся рядом.
[0054] Кроме того, в настоящем варианте осуществления, позиция PT завершения опережения, в которой рассматриваемое транспортное средство опережает едущее впереди в смежной полосе движения транспортное средство, оценивается, и выполняется определение в отношении того, расположена оцененная позиция PT завершения опережения перед точкой PC начала дуги (в позиции ближе к рассматриваемому транспортному средству) или расположена впереди точки PC начала дуги (в позиции дальше от рассматриваемого транспортного средства). После этого, когда позиция PT завершения опережения расположена перед точкой PC начала дуги, выполняется определение в отношении того, что рассматриваемое транспортное средство может опережать едущее впереди в смежной полосе движения транспортное средство перед дугой, и выполняется управление автоматизированным или автономным движением, при котором рассматриваемое транспортное средство управляется, чтобы опережать едущее впереди в смежной полосе движения транспортное средство перед дугой. Через эту операцию, не только можно не допускать движения рассматриваемого транспортного средства и едущего впереди в смежной полосе движения транспортного средства рядом по дуге, но также и предпочтительно может выполняться автоматизированное или автономное управление скоростью, при котором рассматриваемое транспортное средство управляется, чтобы двигаться на заданной скорости автоматизированным или автономным способом, или предпочтительно может выполняться автоматизированное или автономное управление расстоянием, при котором рассматриваемое транспортное средство управляется, чтобы ехать за едущим впереди транспортным средством с заданным расстоянием автоматизированным или автономным способом. С другой стороны, когда позиция завершения опережения расположена впереди точки начала дуги (в позиции дальше от рассматриваемого транспортного средства), выполняется определение в отношении того, что рассматриваемое транспортное средство не может опережать едущее впереди в смежной полосе движения транспортное средство перед дугой, и выполняется управление расстоянием между транспортными средствами, при котором расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством в направлении движения рассматриваемого транспортного средства задается равным предварительно определенному расстоянию D1 (≥0), и рассматриваемое транспортное средство управляется, чтобы двигаться с заданным расстоянием между транспортными средствами. Это обеспечивает возможность не допускать движения рассматриваемого транспортного средства и едущего впереди в смежной полосе движения транспортного средства рядом по дуге.
[0055] Кроме того, в настоящем варианте осуществления, когда едущее впереди транспортное средство, движущееся впереди в полосе движения, в которой движется рассматриваемое транспортное средство, присутствует, выполняется определение в отношении того, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед дугой при поддержании заданного расстояния между транспортными средствами, которое задается водителем, между рассматриваемым транспортным средством и едущим впереди транспортным средством. Затем, когда выполняется определение в отношении того, что рассматриваемое транспортное средство может опережать едущее впереди в смежной полосе движения транспортное средство перед дугой при поддержании заданного расстояния между транспортными средствами, которое задается водителем, между рассматриваемым транспортным средством и едущим впереди транспортным средством, выполняется управление автоматизированным или автономным движением, при котором рассматриваемое транспортное средство управляется, чтобы опережать едущее впереди в смежной полосе движения транспортное средство перед дугой. Через эту операцию, даже когда едущее впереди транспортное средство присутствует, можно не допускать движения рассматриваемого транспортного средства и едущего впереди в смежной полосе движения транспортного средства рядом во время движения по дуге.
[0056] Кроме того, в настоящем варианте осуществления, при условии, что едущее впереди транспортное средство, движущееся впереди в полосе движения, в которой движется рассматриваемое транспортное средство, присутствует, даже когда выполняется определение в отношении того, что рассматриваемое транспортное средство не может опережать едущее впереди в смежной полосе движения транспортное средство перед дугой при поддержании заданного расстояния между транспортными средствами, которое задается водителем, между рассматриваемым транспортным средством и едущим впереди транспортным средством, но когда выполняется определение в отношении того, что рассматриваемое транспортное средство может опережать едущее впереди в смежной полосе движения транспортное средство перед секцией дороги, посредством задания расстояния между транспортными средствами от едущего впереди транспортного средства равным меньшему значению, чем текущее значение, выполняется управление автоматизированным или автономным движением, при котором расстояние между транспортными средствами от едущего впереди транспортного средства задается равным этому меньшему значению, и рассматриваемое транспортное средство управляется, чтобы опережать едущее впереди в смежной полосе движения транспортное средство перед дугой. Через эту операцию, не только можно не допускать движения рассматриваемого транспортного средства и едущего впереди в смежной полосе движения транспортного средства рядом по дуге, но также и предпочтительно может выполняться автоматизированное или автономное управление расстоянием, при котором, когда едущее впереди транспортное средство присутствует, рассматриваемое транспортное средство управляется, чтобы ехать за едущим впереди транспортным средством с заданным расстоянием автоматизированным или автономным способом.
[0057] Кроме того, в настоящем варианте осуществления, пороговое значение радиуса кривизны варьируется в соответствии с величиной варьирования поперечной позиции едущего впереди в смежной полосе движения транспортного средства, и в силу этого может подавляться приближение вплотную друг к другу рассматриваемого транспортного средства и едущего впереди в смежной полосе движения транспортного средства по мере того, как степень флуктуации едущего впереди в смежной полосе движения транспортного средства увеличивается. Таким образом, с учетом фактической ситуации дуги, которая не может считываться из картографической базы 120 данных, можно точно выбирать дугу, которой требуется мера противодействия посредством управления расстоянием между транспортными средствами настоящего варианта осуществления.
[0058] Далее описываются оборудование управления движением и способ согласно другому варианту осуществления настоящего изобретения. Оборудование 100 управления движением согласно настоящему варианту осуществления имеет конфигурацию, идентичную конфигурации оборудования 100 управления движением варианта осуществления, проиллюстрированного на фиг. 1, и настоящий вариант осуществления является идентичным вышеописанному варианту осуществления за исключением того, что оборудование 100 управления движением настоящего варианта осуществления работает следующим образом, так что конфигурация оборудования 100 управления движением заимствуется здесь. В вышеописанном варианте осуществления, управление расстоянием между транспортными средствами относительно едущего впереди в смежной полосе движения транспортного средства выполняется на дуге, но управление расстоянием между транспортными средствами настоящего изобретения также может применяться к узкой дороге в дополнение к дуге. Ниже описывается процесс управления движением согласно настоящему варианту осуществления со ссылкой на фиг. 15.
[0059] Этапы S301-S304 выполняются аналогично этапам S101-S104 варианта осуществления, проиллюстрированного на фиг. 2. Таким образом, информация рассматриваемого транспортного средства и информация окружающих условий получается (этапы S301 и S302), и едущее впереди в смежной полосе движения транспортное средство и едущее впереди транспортное средство указываются (этап S303). Когда едущее впереди в смежной полосе движения транспортное средство присутствует (этап S304), процесс переходит к этапу S305.
[0060] На этапе S305, функция определения форм дорог служит для того, чтобы выполнять процесс определения форм дорог для определения того, представляет собой дорога, расположенная впереди рассматриваемого транспортного средства, или нет узкую дорогу. Здесь, фиг. 16 является блок-схемой последовательности операций способа, иллюстрирующей процесс определения форм дорог согласно настоящему варианту осуществления.
[0061] На этапе S401, функция определения форм дорог в первую очередь служит для того, чтобы получать ширину W дороги для дороги, расположенной впереди рассматриваемого транспортного средства. Например, функция определения форм дорог может служить для того, чтобы обращаться к текущей позиции рассматриваемого транспортного средства и картографической базе 120 данных и в силу этого получать ширину W дороги для дороги, расположенной впереди рассматриваемого транспортного средства.
[0062] На этапе S402, функция определения форм дорог служит для того, чтобы получать ширину B транспортного средства для едущего впереди в смежной полосе движения транспортного средства на основе информации окружающих условий, полученной на этапе S302. Например, функция определения форм дорог может быть выполнена с возможностью обнаруживать ширину B транспортного средства для едущего впереди в смежной полосе движения транспортного средства на основе изображения, захваченного посредством камеры 150.
[0063] На этапе S403, функция определения форм дорог служит для того, чтобы задавать пороговое значение Wth для узкой дороги. В настоящем варианте осуществления, функция определения форм дорог в первую очередь служит для того, чтобы вычислять отношение (B/W) ширины B транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2, полученной на этапе S402, к ширине W дороги для дороги, расположенной впереди, полученной на этапе S401. Затем функция определения форм дорог служит для того, чтобы задавать пороговое значение Wth для узкой дороги в соответствии с отношением (B/W) ширины B транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2 к ширине W дороги для дороги, расположенной впереди.
[0064] Фиг. 17 является графиком (картой управления), иллюстрирующим пример взаимосвязи между отношением (B/W) ширины B транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2 к ширине W дороги для дороги, расположенной впереди, и пороговым значением Wth для узкой дороги. Как проиллюстрировано на фиг. 17, когда отношение (B/W) ширины B транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2 к ширине W дороги для дороги, расположенной впереди, меньше X1, функция определения форм дорог служит для того, чтобы задавать пороговое значение Wth для узкой дороги равным W2. Когда отношение (B/W) ширины B транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2 к ширине W дороги для дороги, расположенной впереди, составляет X1 или больше и меньше X2, функция определения форм дорог служит для того, чтобы задавать пороговое значение Wth для узкой дороги таким образом, что пороговое значение Wth для узкой дороги увеличивается пропорционально отношению (B/W) в пределах диапазона от W2 до W1. Когда отношение (B/W) ширины B транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2 к ширине W дороги для дороги, расположенной впереди, составляет X2 или больше, функция определения форм дорог служит для того, чтобы задавать пороговое значение Wth для узкой дороги равным W1. X1, X2, W1 и W2 не ограничены конкретным образом и могут надлежащим образом задаваться посредством экспериментов и т.п. Таким образом, пороговое значение Wth для узкой дороги задается большим по мере того, как отношение B/W увеличивается (ширина W дороги меньше, и/или ширина B транспортного средства больше); в силу этого частота, с которой дорога определяется в качестве узкой дороги, становится высокой по мере того, как ширина B транспортного средства увеличивается даже при идентичной ширине W дороги, и/или по мере того, как ширина W дороги уменьшается даже при идентичной ширине B транспортного средства.
[0065] На этапе S404 по фиг. 16, функция определения форм дорог служит для того, чтобы выполнять определение в отношении того, меньше или нет ширина W дороги для дороги, расположенной впереди рассматриваемого транспортного средства, которая получается на этапе S401, порогового значения Wth для узкой дороги, которое задается на этапе S403. Когда ширина W дороги для дороги, расположенной впереди рассматриваемого транспортного средства, меньше порогового значения Wth для узкой дороги, процесс переходит к этапу S405, на котором функция определения форм дорог служит для того, чтобы определять то, что дорога, расположенная впереди рассматриваемого транспортного средства, представляет собой узкую дорогу. С другой стороны, когда ширина W дороги для дороги, расположенной впереди рассматриваемого транспортного средства, не меньше порогового значения Wth для узкой дороги, процесс переходит к этапу S406, на котором функция определения форм дорог служит для того, чтобы определять то, что дорога, расположенная впереди рассматриваемого транспортного средства, не представляет собой узкую дорогу.
[0066] При таком определении, выполненном на этапе S405, что дорога, расположенная впереди рассматриваемого транспортного средства, представляет собой узкую дорогу, выполняется этап S407, на котором функция определения форм дорог служит для того, чтобы вычислять расстояние от текущей позиции рассматриваемого транспортного средства до точки начала узкой дороги, расположенной впереди рассматриваемого транспортного средства. После того, как процесс определения форм дорог, проиллюстрированный на фиг. 16, завершается, процесс переходит к этапу S306, проиллюстрированному на фиг. 15.
[0067] На этапе S306 по фиг. 15, функция определения опережения служит для того, чтобы выполнять определение в отношении того, представляет собой дорога, расположенная впереди рассматриваемого транспортного средства, или нет узкую дорогу, на основе результата определения, полученного в процессе определения форм дорог этапа S305. В процессе определения форм дорог, проиллюстрированном на фиг. 16, когда выполняется определение в отношении того, что дорога, расположенная впереди рассматриваемого транспортного средства, представляет собой узкую дорогу (этап S405), процесс переходит к этапу S307, тогда как, когда выполняется определение в отношении того, что дорога, расположенная впереди рассматриваемого транспортного средства, не представляет собой узкую дорогу (этап S406), процесс переходит к этапу S317.
[0068] На этапах S307 и S308, аналогично этапам S107 и S108 варианта осуществления, проиллюстрированного на фиг. 2, оценивается позиция завершения опережения, в которой рассматриваемое транспортное средство опережает едущее впереди в смежной полосе движения транспортное средство, если рассматриваемое транспортное средство и едущее впереди в смежной полосе движения транспортное средство движутся на соответствующих текущих скоростях транспортного средства (этап S307), и выполняется определение в отношении того, присутствует или нет едущее впереди транспортное средство впереди рассматриваемого транспортного средства (этап S308).
[0069] Затем, когда выполняется определение в отношении того, что едущее впереди транспортное средство не присутствует, процесс переходит к этапу S309, на котором функция определения опережения служит для того, чтобы определять то, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство на текущей скорости движения рассматриваемого транспортного средства перед узкой дорогой, расположенной впереди. В частности, функция определения опережения служит для того, чтобы определять то, расположена или нет позиция, оцененная на этапе S307, на котором рассматриваемое транспортное средство опережает едущее впереди в смежной полосе движения транспортное средство, перед точкой начала узкой дороги, расположенной впереди рассматриваемого транспортного средства. После этого, когда позиция, в которой рассматриваемое транспортное средство опережает едущее впереди в смежной полосе движения транспортное средство, расположена перед точкой начала узкой дороги, расположенной впереди рассматриваемого транспортного средства, выполняется определение в отношении того, что рассматриваемое транспортное средство может опережать едущее впереди в смежной полосе движения транспортное средство перед узкой дорогой, расположенной впереди. Если позиция, в которой рассматриваемое транспортное средство опережает едущее впереди в смежной полосе движения транспортное средство, не может оцениваться вследствие меньшей скорости транспортного средства для рассматриваемого транспортного средства, чем скорость транспортного средства для едущего впереди в смежной полосе движения транспортного средства, выполняется определение в отношении того, что рассматриваемое транспортное средство не может опережать едущее впереди в смежной полосе движения транспортное средство перед узкой дорогой, расположенной впереди.
[0070] При определении того, что рассматриваемое транспортное средство может опережать едущее впереди в смежной полосе движения транспортное средство перед узкой дорогой, расположенной впереди, выполняется этап S310. На этапе S310, аналогично этапу S110 первого варианта осуществления, выполняется управление скоростью, при котором рассматриваемое транспортное средство управляется, чтобы двигаться на заданной скорости транспортного средства, которая задается водителем. С другой стороны, при определении того, что рассматриваемое транспортное средство не может опережать едущее впереди в смежной полосе движения транспортное средство перед узкой дорогой, расположенной впереди, когда рассматриваемое транспортное средство управляется, чтобы двигаться на текущей скорости транспортного средства, выполняется этап S311. На этапах S311 и S312, аналогично этапам S111 и S112 варианта осуществления, проиллюстрированного на фиг. 2, расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством задается равным предварительно определенному расстоянию D1 (этап S311), и выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется, чтобы двигаться с расстоянием D1 между транспортными средствами от едущего впереди в смежной полосе движения транспортного средства (этап S312).
[0071] Когда выполняется определение в отношении того на этапе S308, что едущее впереди транспортное средство присутствует, процесс переходит к этапу S313. На этапе S313, функция определения опережения служит для того, чтобы определять то, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед узкой дорогой при поддержании расстояния между транспортными средствами от едущего впереди транспортного средства равным расстоянию D2 между транспортными средствами, которое предварительно задается. Когда выполняется определение в отношении того, что рассматриваемое транспортное средство может опережать едущее впереди в смежной полосе движения транспортное средство перед узкой дорогой, процесс переходит к этапу S314. На этапе S314, аналогично этапу S114 варианта осуществления, проиллюстрированного на фиг. 2, заданное расстояние между транспортными средствами для рассматриваемого транспортного средства остается равным D2. С другой стороны, когда выполняется определение в отношении того, что рассматриваемое транспортное средство не может опережать едущее впереди в смежной полосе движения транспортное средство перед узкой дорогой при поддержании расстояния D2 между транспортными средствами, процесс переходит к этапу S315, на котором функция определения опережения служит для того, чтобы определять то, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед узкой дорогой, если расстояние между транспортными средствами между едущим впереди транспортным средством и рассматриваемым транспортным средством изменяется на D3, меньшее заданного расстояния D2 между транспортными средствами. Когда рассматриваемое транспортное средство может опережать едущее впереди в смежной полосе движения транспортное средство перед узкой дорогой, процесс переходит к этапу S316, из которого, аналогично этапам S116 и S112 варианта осуществления, проиллюстрированного на фиг. 2, заданное расстояние между транспортными средствами для рассматриваемого транспортного средства изменяется на D3 (этап S316), и выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется, чтобы двигаться с расстоянием D3 между транспортными средствами от едущего впереди транспортного средства (этап S312). С другой стороны, когда рассматриваемое транспортное средство не может опережать едущее впереди в смежной полосе движения транспортное средство перед узкой дорогой даже с расстоянием D3 между транспортными средствами, процесс переходит к этапу S311, из которого, аналогично этапам S111 и S112 варианта осуществления, проиллюстрированного на фиг. 2, заданное расстояние между транспортными средствами от едущего впереди в смежной полосе движения транспортного средства задается равным D1 (этап S311), и выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется, чтобы двигаться таким образом, что оно едет за едущим впереди в смежной полосе движения транспортным средством (этап S312).
[0072] Как описано выше, согласно настоящему варианту осуществления, во время управления автоматизированным или автономным движением рассматриваемого транспортного средства, когда узкая дорога присутствует впереди рассматриваемого транспортного средства, и едущее впереди в смежной полосе движения транспортное средство присутствует сбоку от рассматриваемого транспортного средства, к примеру, в смежной полосе движения относительно полосы движения для рассматриваемого транспортного средства, выполняется определение в отношении того, должны или нет рассматриваемое транспортное средство и едущее впереди в смежной полосе движения транспортное средство двигаться рядом по узкой дороге. Затем, когда выполняется определение в отношении того, что рассматриваемое транспортное средство и едущее впереди в смежной полосе движения транспортное средство должны двигаться рядом по узкой дороге, выполняется управление расстоянием между транспортными средствами, при котором расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством в направлении движения рассматриваемого транспортного средства задается равным предварительно определенному расстоянию D1 (≥0), и рассматриваемое транспортное средство управляется, чтобы двигаться с заданным расстоянием между транспортными средствами. Это обеспечивает возможность не допускать движения рассматриваемого транспортного средства и едущего впереди в смежной полосе движения транспортного средства рядом по узкой дороге, и в силу этого можно исключать некомфортное ощущение, которое возникает у водителя по мере того, как рассматриваемое транспортное средство и находящееся в смежной полосе движения транспортное средство движутся рядом по узкой дороге, имеющей относительно узкую ширину дороги.
[0073] Кроме того, в настоящем варианте осуществления, пороговое значение Wth для узкой дороги задается в соответствии с отношением (B/W) ширины B транспортного средства для едущего впереди в смежной полосе движения транспортного средства V2 к ширине W дороги для дороги, расположенной впереди, и в силу этого можно точно выбирать узкую дорогу, которой требуется мера противодействия посредством управления расстоянием между транспортными средствами настоящего варианта осуществления.
[0074] В вышеописанных вариантах осуществления, примерно иллюстрируется конфигурация, в которой когда рассматриваемое транспортное средство может опережать едущее впереди в смежной полосе движения транспортное средство перед дугой или узкой дорогой, рассматриваемое транспортное средство управляется, чтобы опережать едущее впереди в смежной полосе движения транспортное средство перед дугой или узкой дорогой вместо выполнения управления расстоянием между транспортными средствами для задания расстояния между транспортными средствами между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством равным D1. Тем не менее, настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, не выполняется определение в отношении того, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед дугой или узкой дорогой, и во время выполнения управления автоматизированным или автономным движением, когда находящееся в смежной полосе движения транспортное средство присутствует сбоку от рассматриваемого транспортного средства, и дуга или узкая дорога присутствует впереди рассматриваемого транспортного средства, управление расстоянием между транспортными средствами выполняется для того, чтобы задавать расстояние между транспортными средствами между рассматриваемым транспортным средством и едущим впереди в смежной полосе движения транспортным средством равным D1. Также в этом случае можно не допускать движения рассматриваемого транспортного средства и находящегося в смежной полосе движения транспортного средства рядом по дуге или узкой дороге, и в силу этого можно исключать некомфортное ощущение, которое возникает у водителя по мере того, как рассматриваемое транспортное средство и находящееся в смежной полосе движения транспортное средство движутся рядом по дуге или узкой дороге.
[0075] В вышеописанных вариантах осуществления, примерно иллюстрируется конфигурация, в которой когда едущее впереди в смежной полосе движения транспортное средство присутствует впереди рассматриваемого транспортного средства сбоку от него, выполняется определение в отношении того, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед дугой или узкой дорогой. Тем не менее, настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, когда рассматриваемое транспортное средство движется на прямой дороге рядом с находящимся в смежной полосе движения транспортным средством, движущимся в смежной полосе движения, выполняется определение в отношении того, может или нет рассматриваемое транспортное средство опережать едущее впереди в смежной полосе движения транспортное средство перед дугой или узкой дорогой. Помимо этого или альтернативно, также может использоваться еще одна другая конфигурация, в которой когда едущее сзади в смежной полосе движения транспортное средство присутствует позади рассматриваемого транспортного средства сбоку от него, выполняется определение в отношении того, может или нет едущее сзади в смежной полосе движения транспортное средство опережать рассматриваемое транспортное средство перед дугой или узкой дорогой, и когда едущее сзади в смежной полосе движения транспортное средство не может опережать рассматриваемое транспортное средство перед дугой или узкой дорогой, рассматриваемое транспортное средство управляется, чтобы двигаться во время движения по дуге или узкой дороге таким образом, что рассматриваемое транспортное средство отделено от едущего сзади в смежной полосе движения транспортного средства на расстояние, которое составляет предварительно определенное расстояние или более в направлении движения рассматриваемого транспортного средства. Таким образом, настоящее изобретение не ограничено применением к едущему впереди в смежной полосе движения транспортному средству, движущемуся впереди рассматриваемого транспортного средства сбоку от него, и когда находящееся в смежной полосе движения транспортное средство присутствует впереди рассматриваемого транспортного средства сбоку от него, присутствует непосредственно около рассматриваемого транспортного средства или присутствует позади рассматриваемого транспортного средства сбоку от него, выполняется определение в отношении того, что находящееся в смежной полосе движения транспортное средство присутствует "сбоку от" рассматриваемого транспортного средства, и выполняется управление расстоянием между транспортными средствами, при котором рассматриваемое транспортное средство управляется, чтобы двигаться во время движения по дуге или узкой дороге таким образом, что рассматриваемое транспортное средство отделено от находящегося в смежной полосе движения транспортного средства на расстояние, которое составляет предварительно определенное расстояние или более в направлении движения рассматриваемого транспортного средства.
[0076] В вышеописанных вариантах осуществления, примерно иллюстрируется конфигурация, в которой радиус кривизны дороги, расположенной впереди, сравнивается с пороговым значением радиуса кривизны, чтобы за счет этого определять то, представляет собой дорога, расположенная впереди, или нет дугу. Тем не менее, настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, кривизна дороги, расположенной впереди, сравнивается с пороговым значением кривизны, чтобы за счет этого определять то, представляет собой дорога, расположенная впереди, или нет дугу.
[0077] В вышеописанных вариантах осуществления, устройство 180 управления соответствует контроллеру настоящего изобретения, едущее впереди в смежной полосе движения транспортное средство V2 соответствует другому транспортному средству настоящего изобретения, дуга и узкая дорога соответствуют секции дороги настоящего изобретения, и точка начала дуги и точка начала узкой дороги соответствуют начальной точке секции дороги настоящего изобретения.
Описание номеров ссылок
[0078] 100 - оборудование управления движением
110 - устройство обнаружения позиции рассматриваемого транспортного средства
120 - картографическая база данных
130 - датчик скорости транспортного средства
140 - датчик дальности
150 - камера
160 - устройство ввода
170 - приводной механизм
180 - устройство управления.
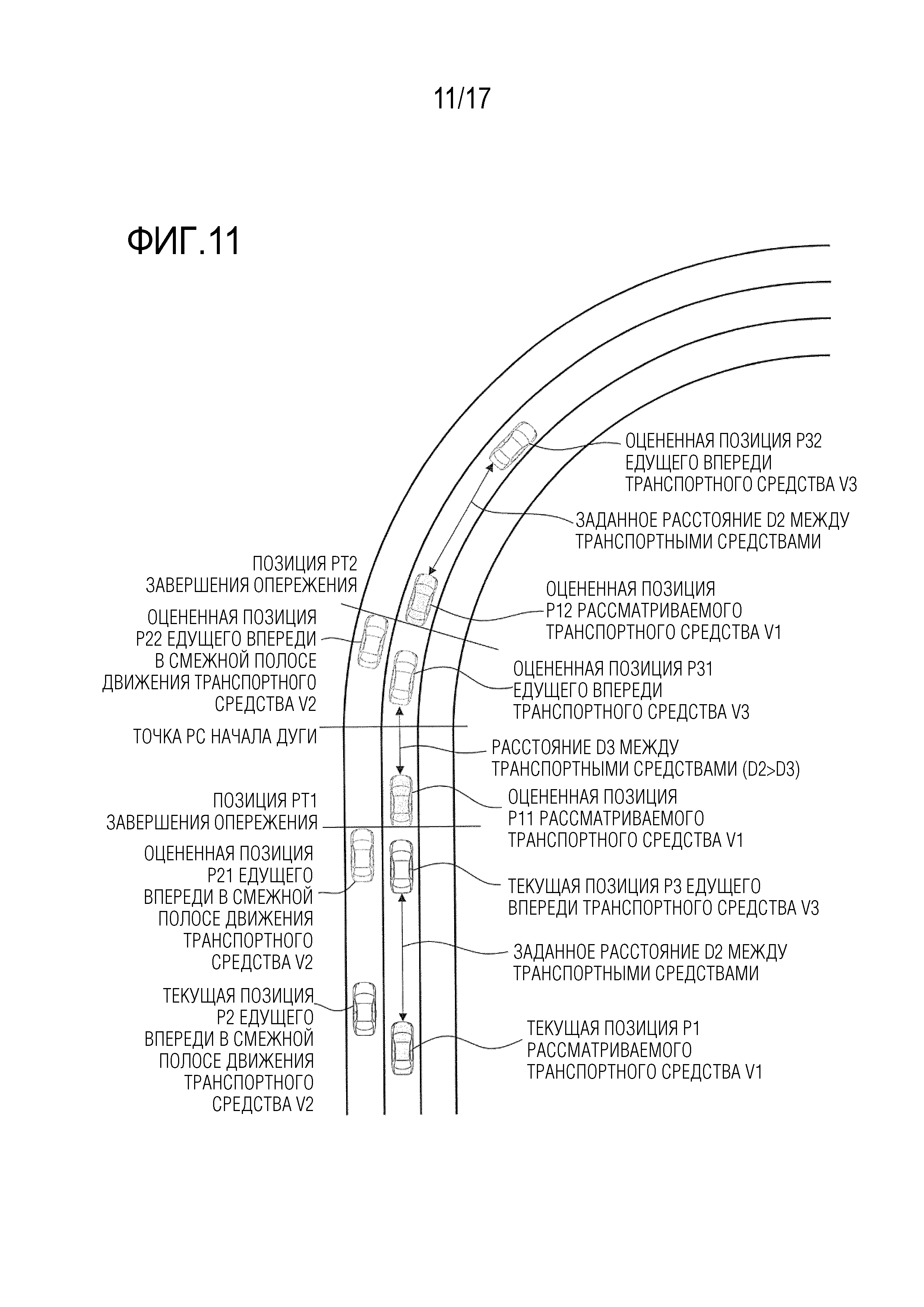
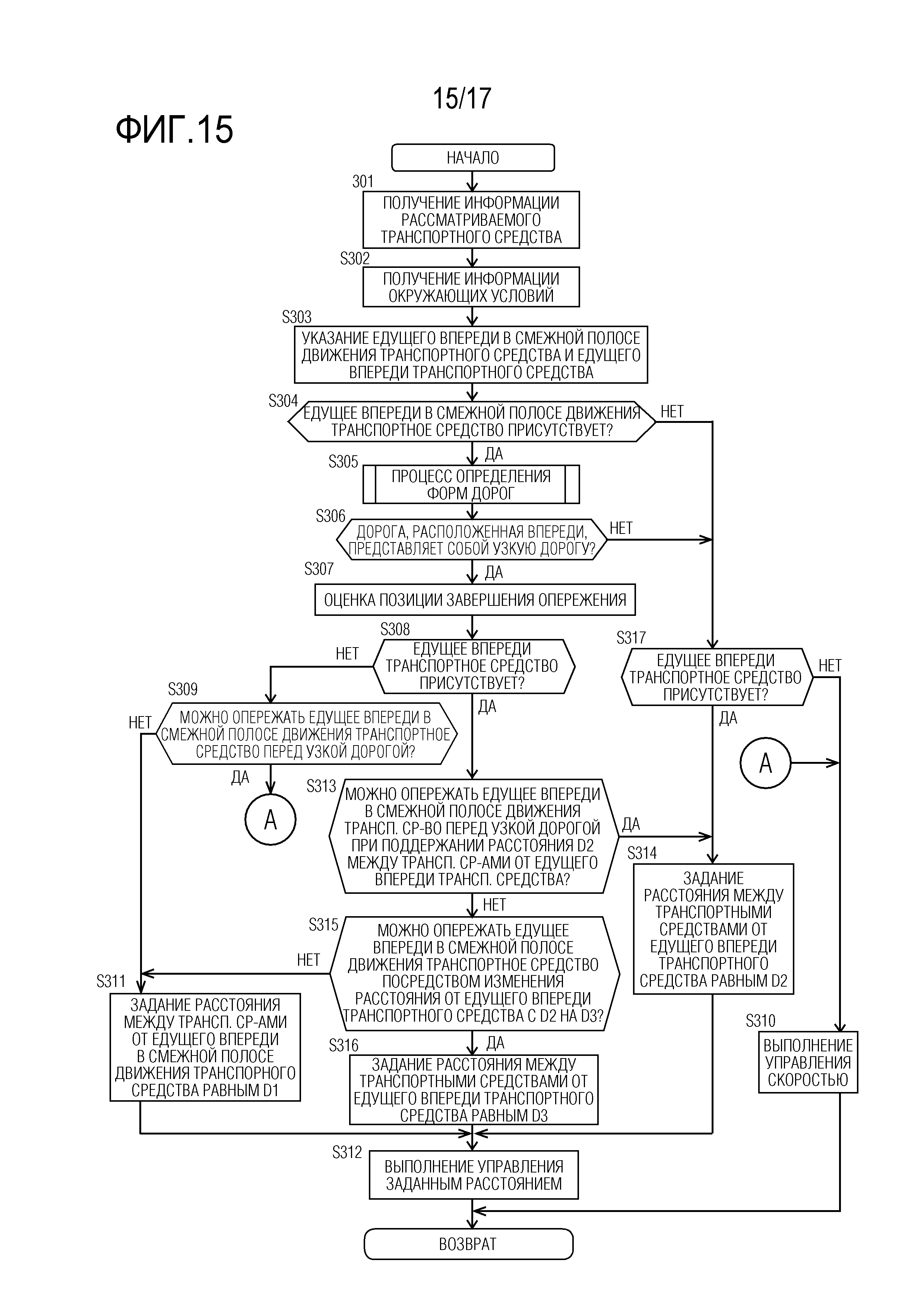
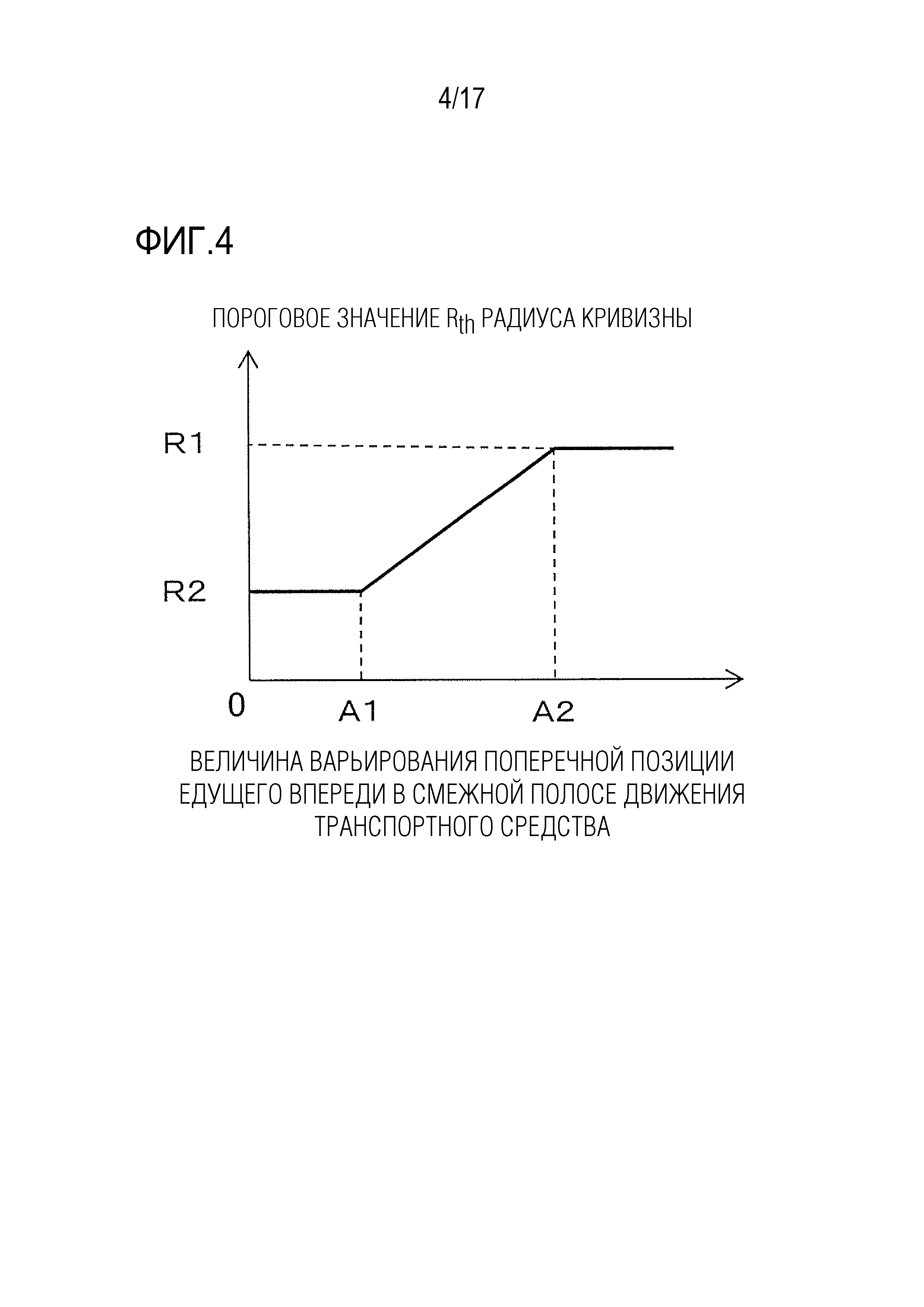
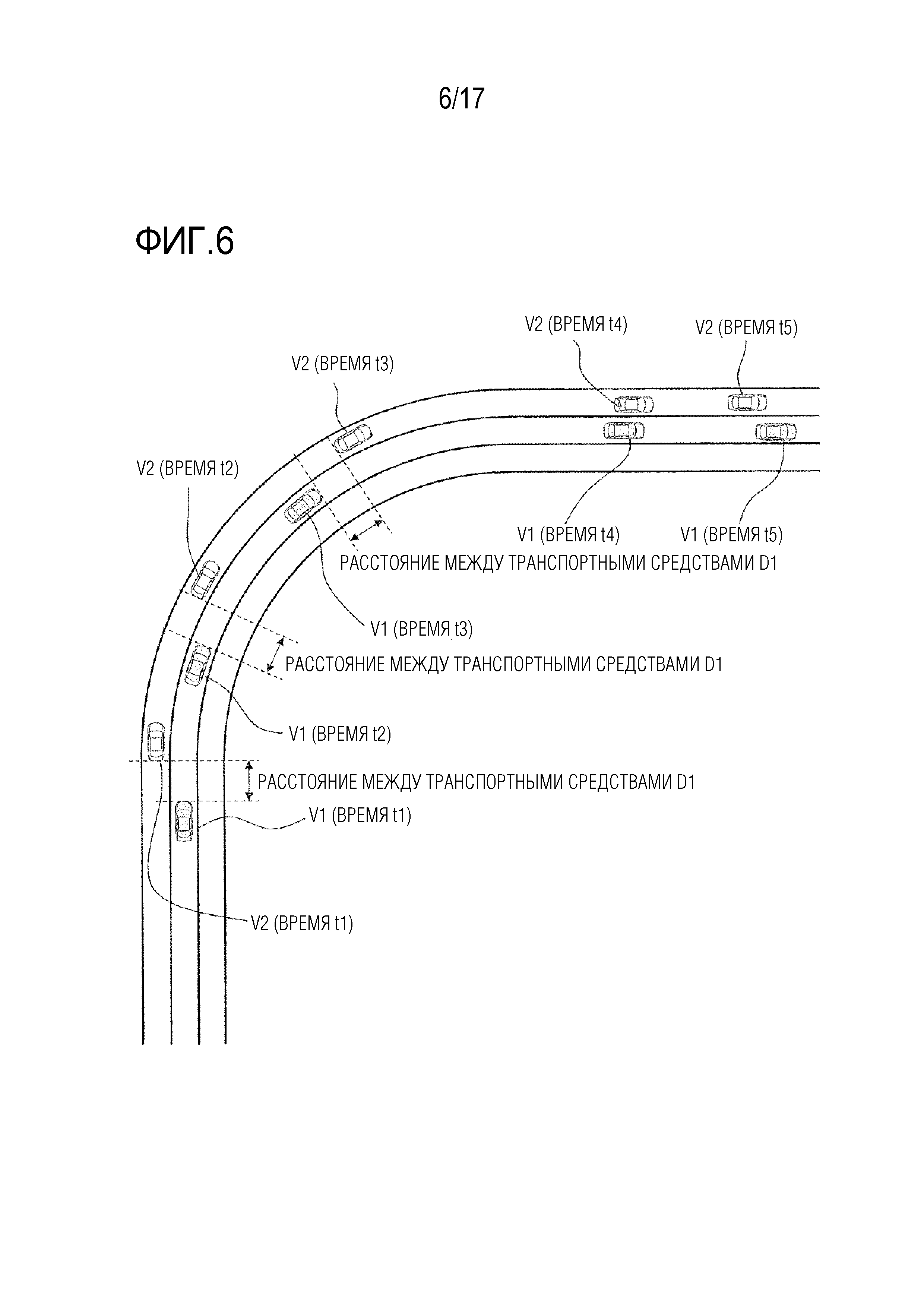
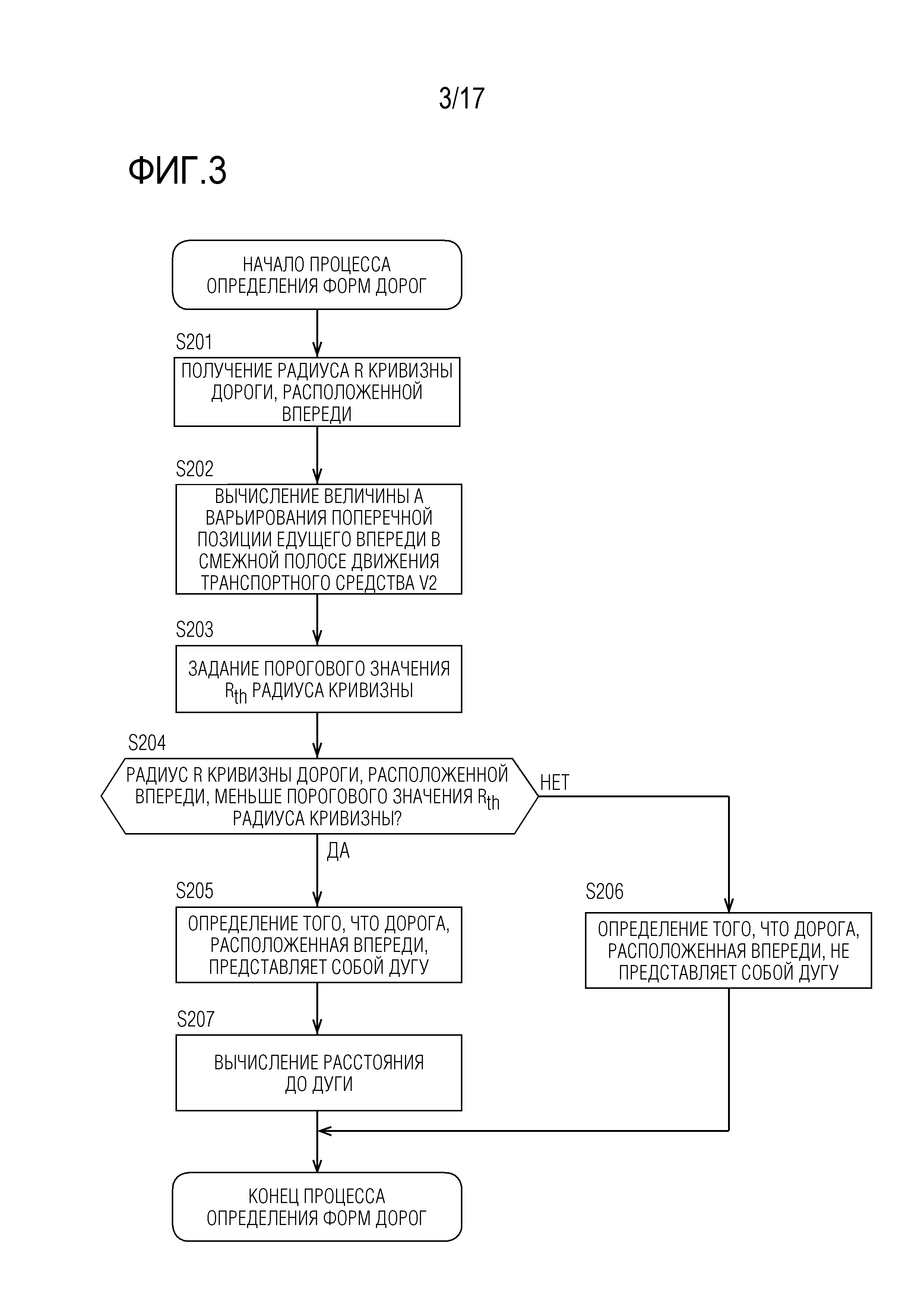
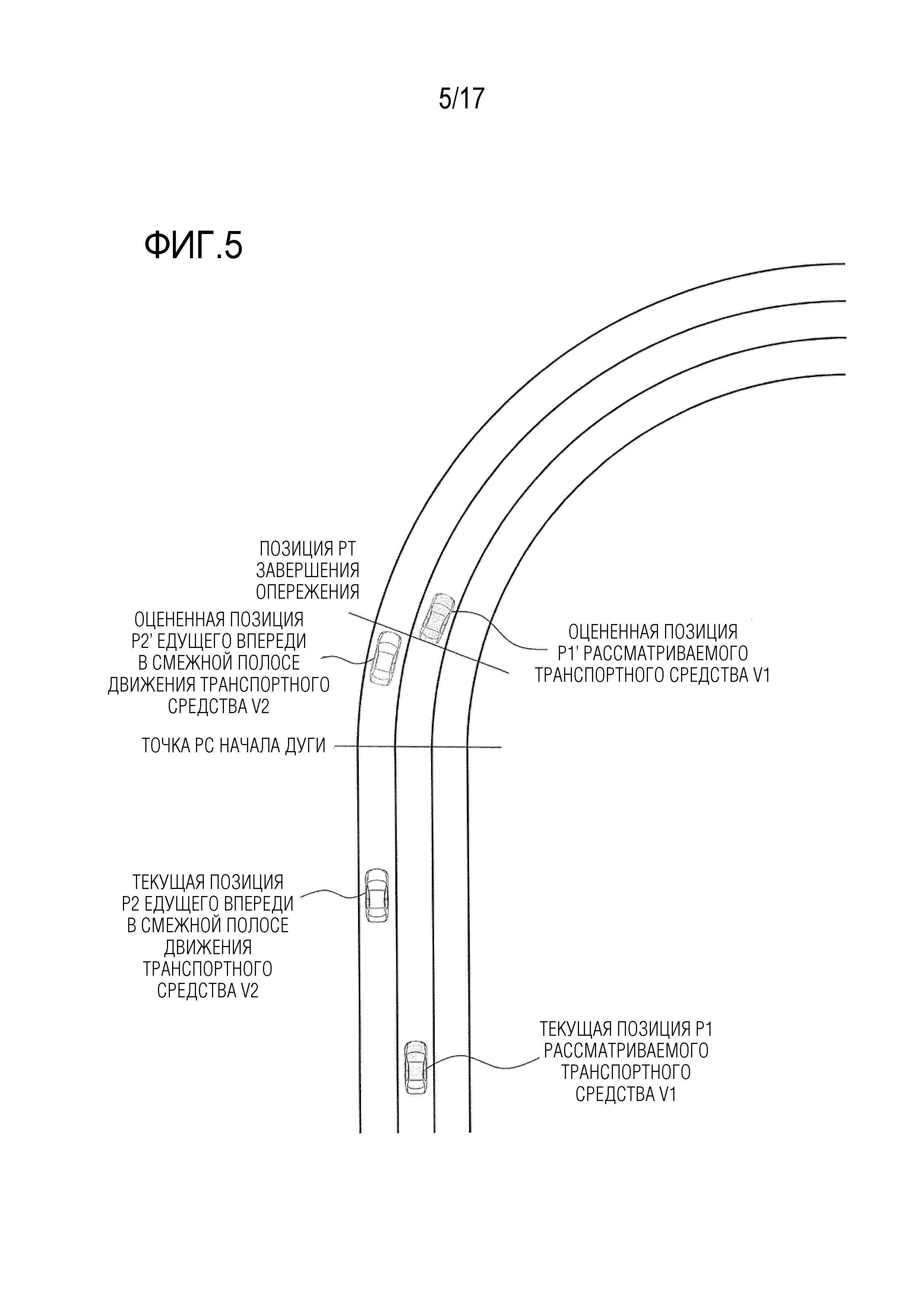
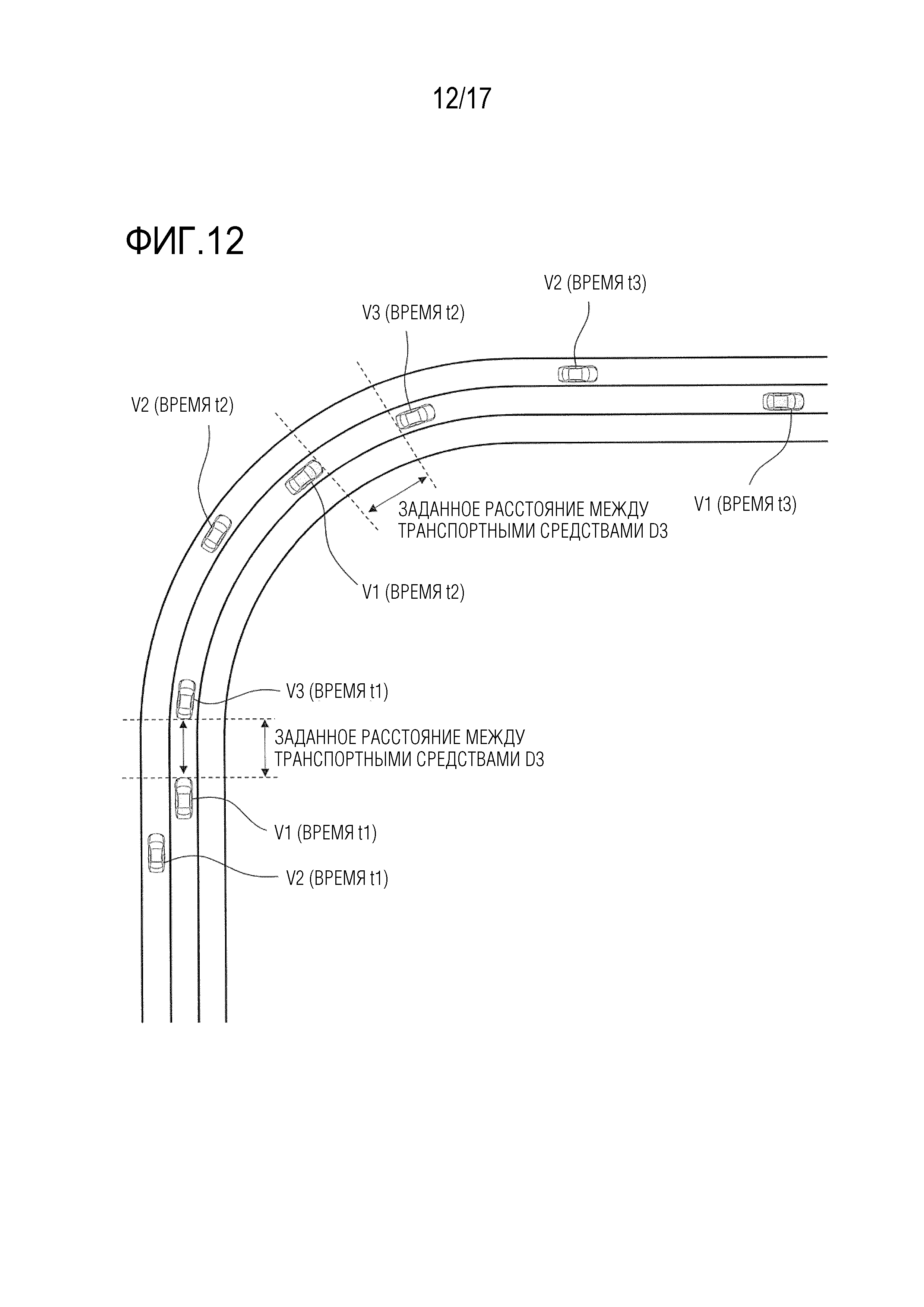
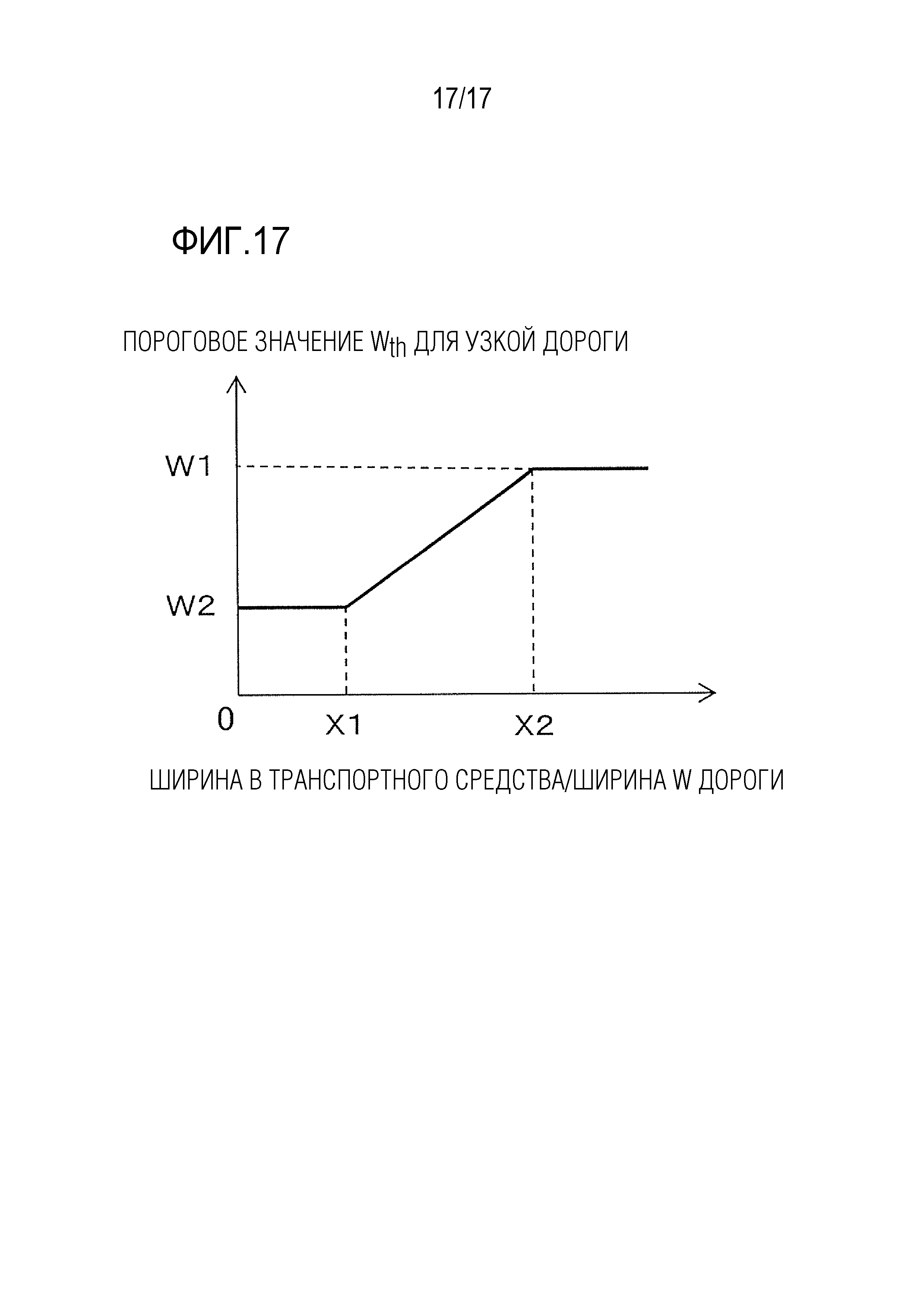
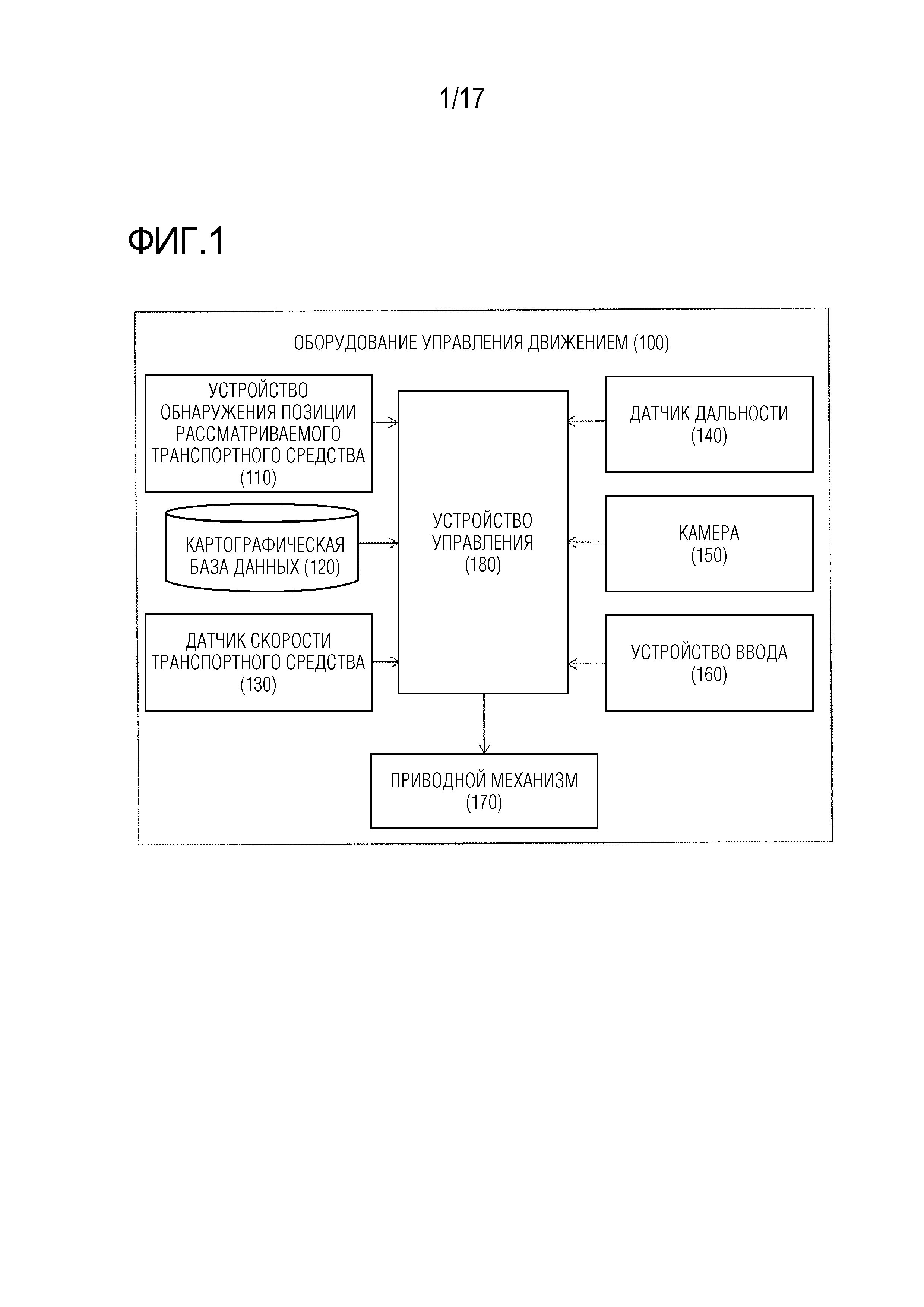
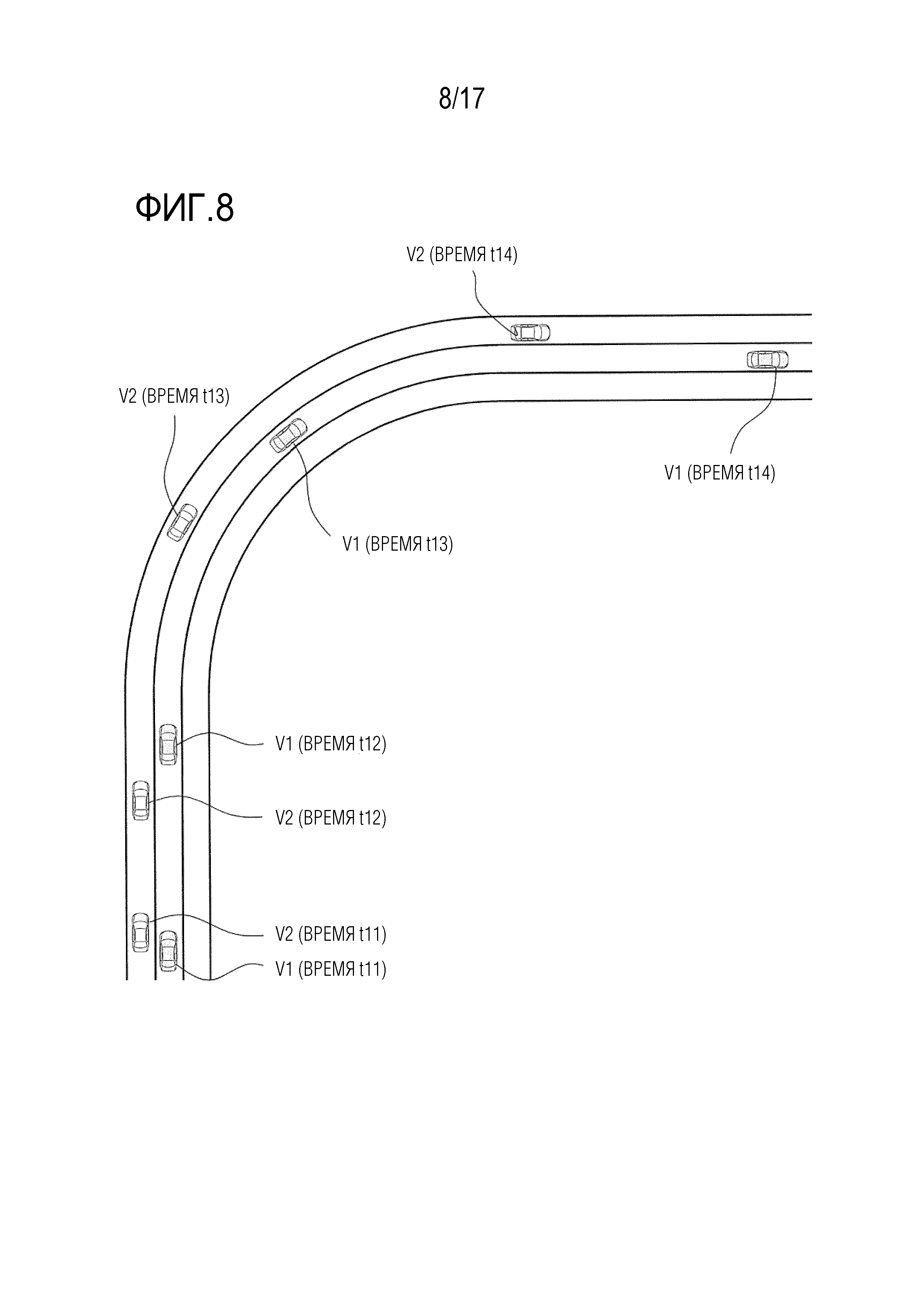
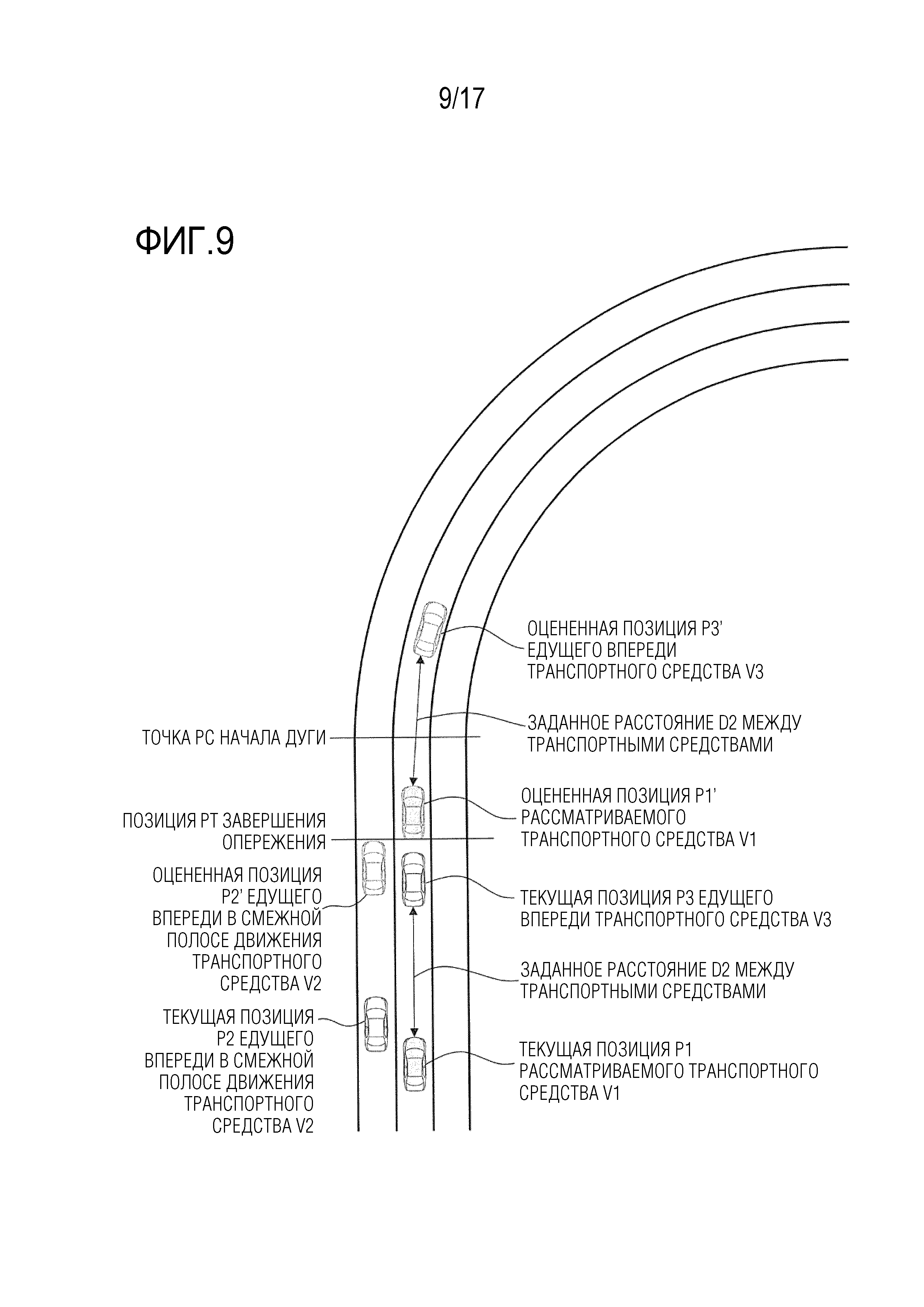
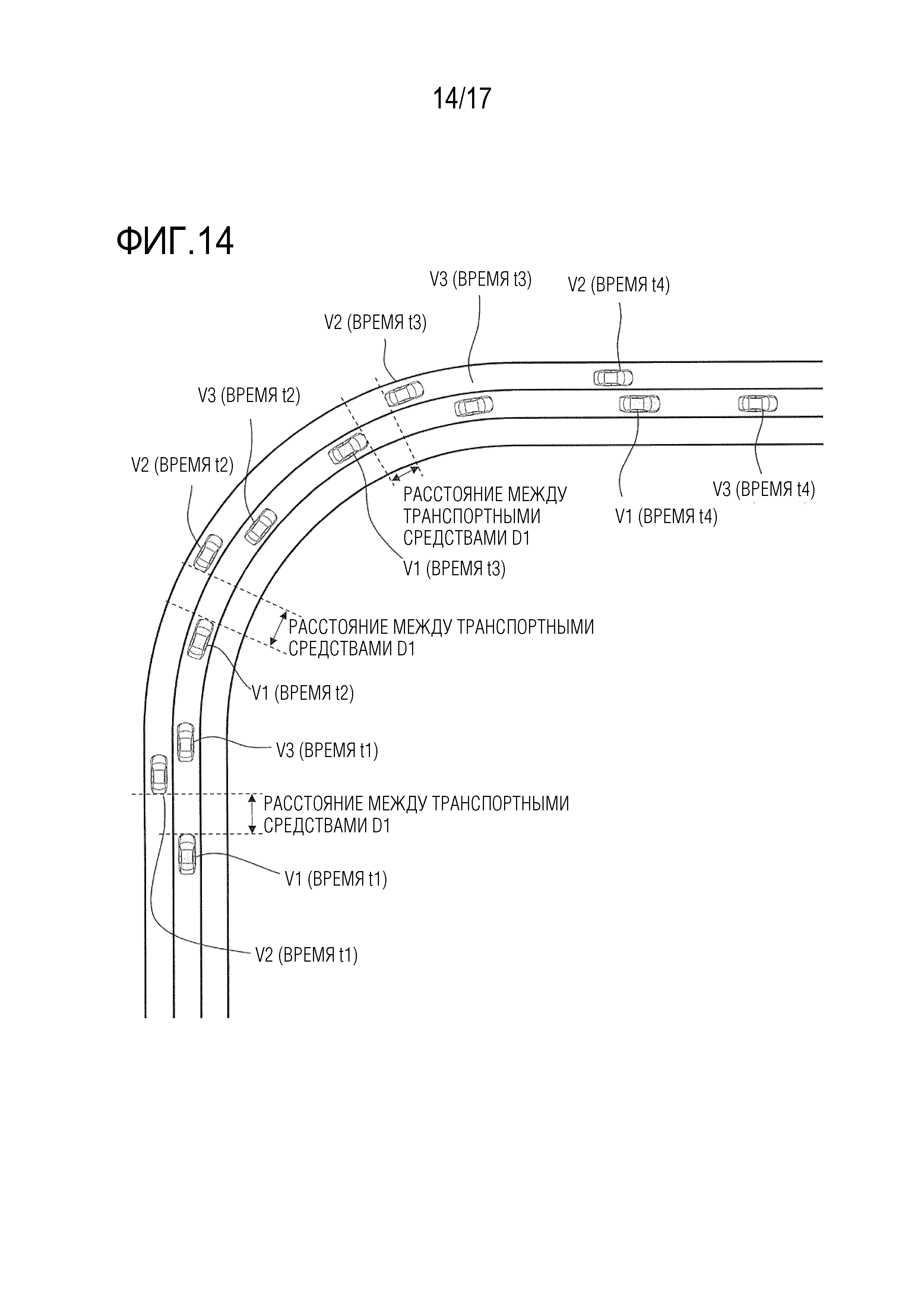
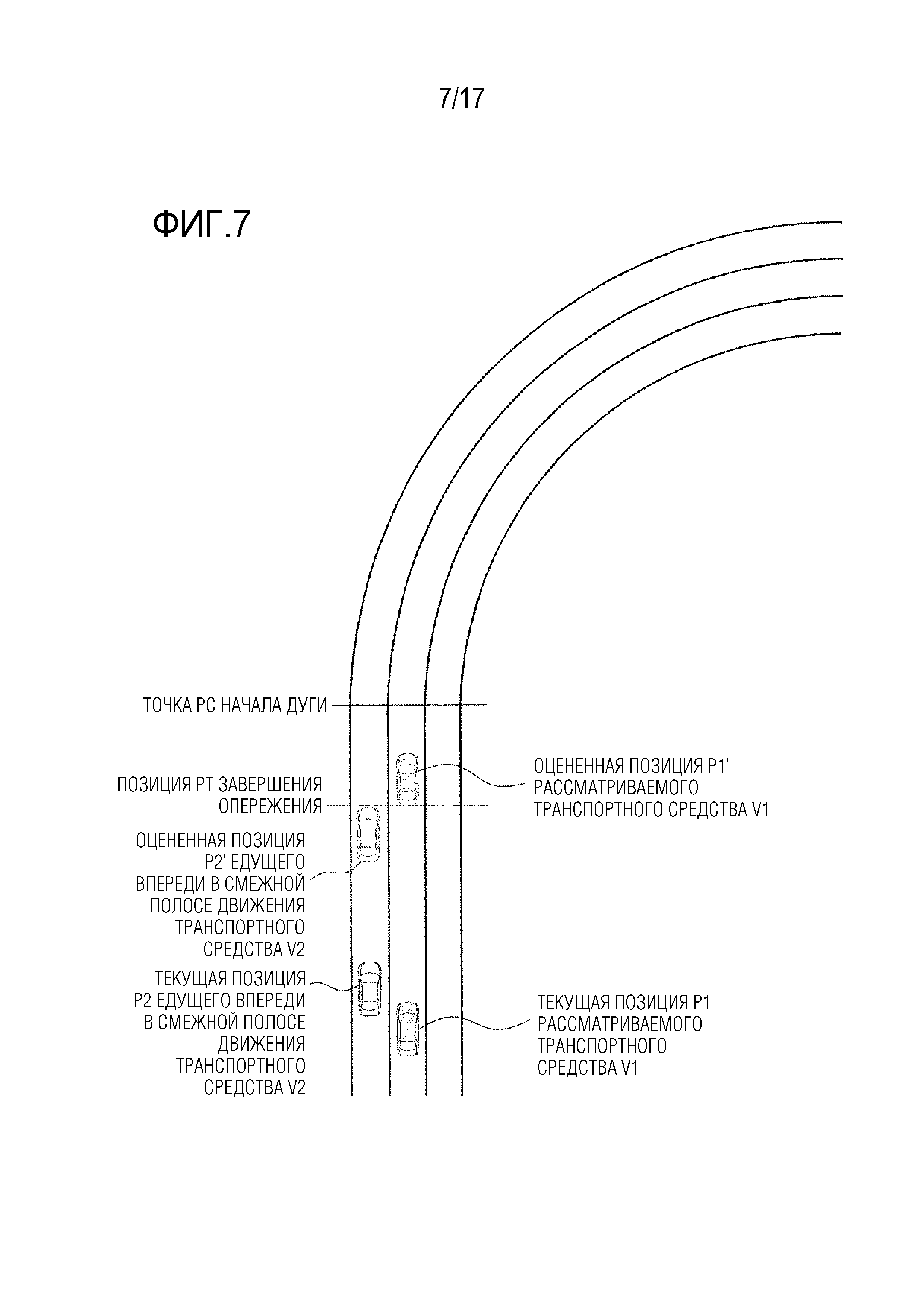
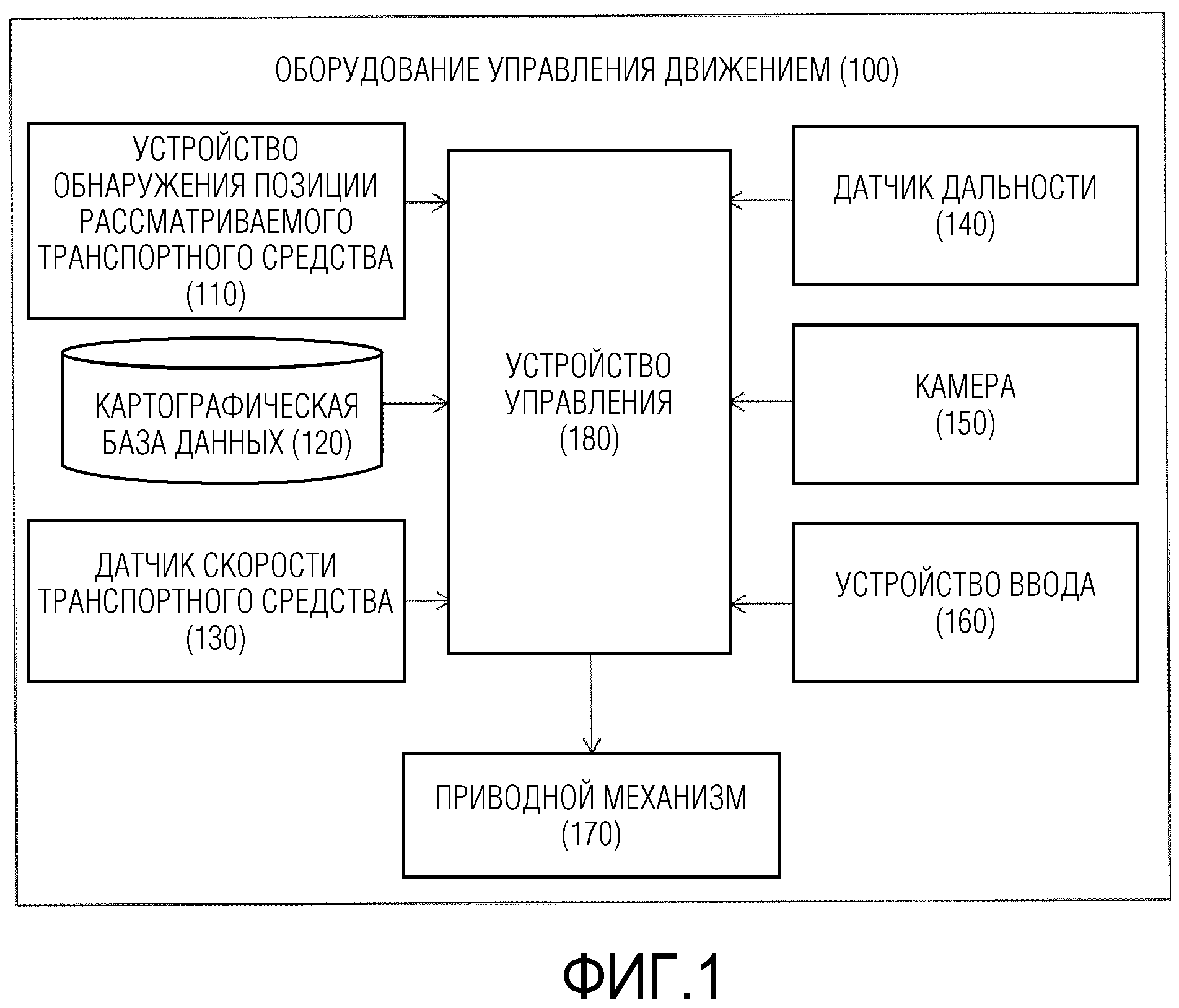
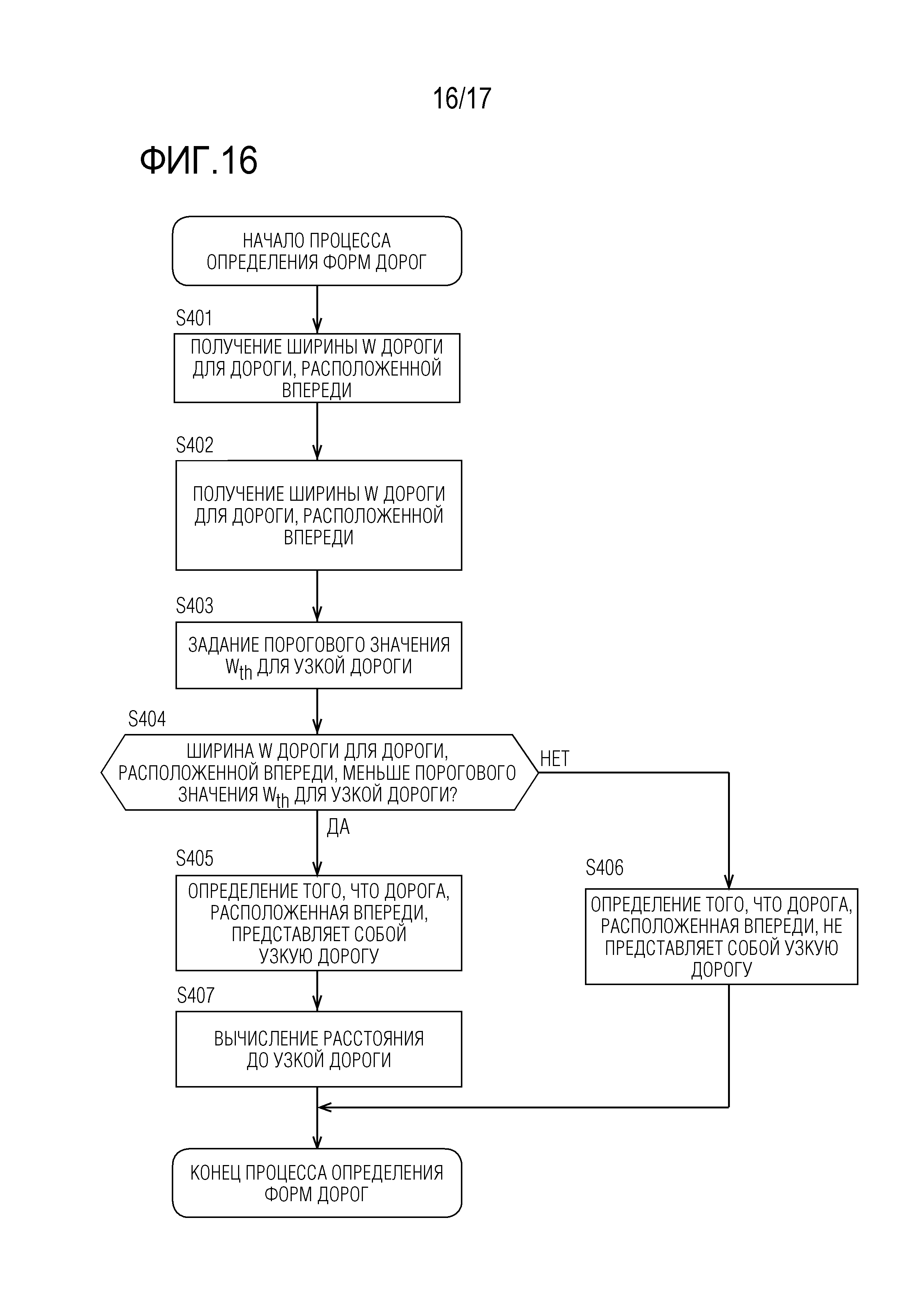
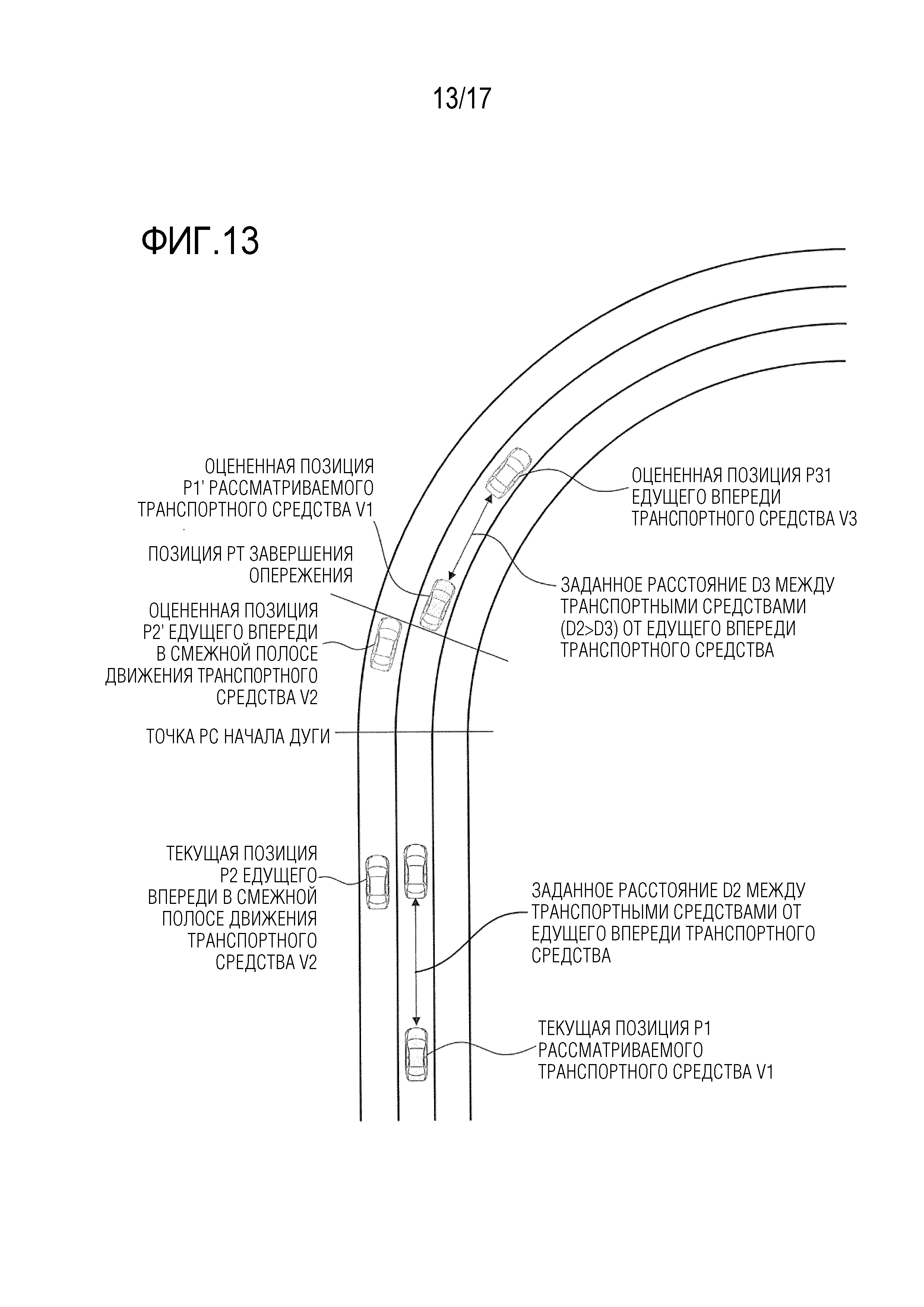
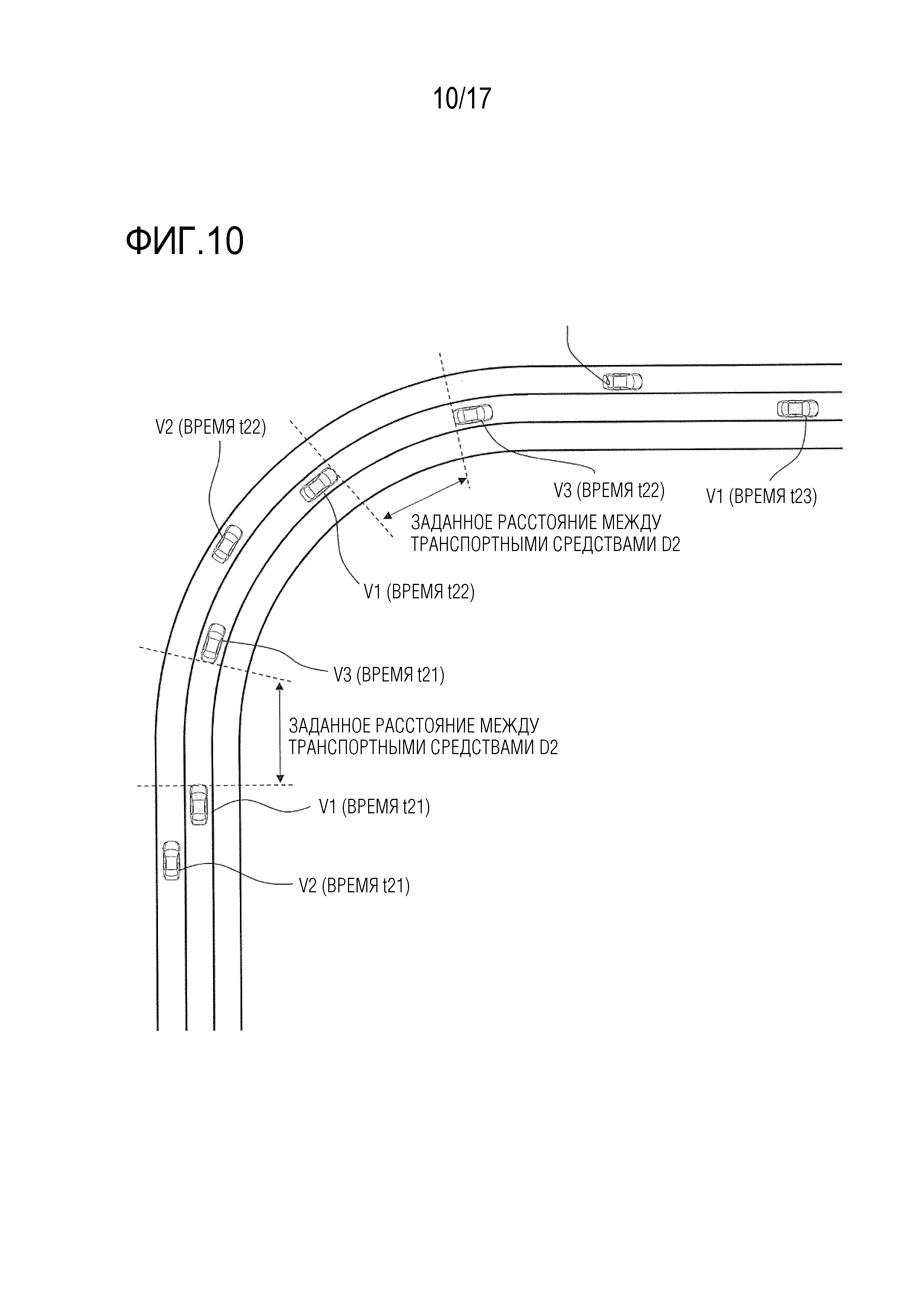
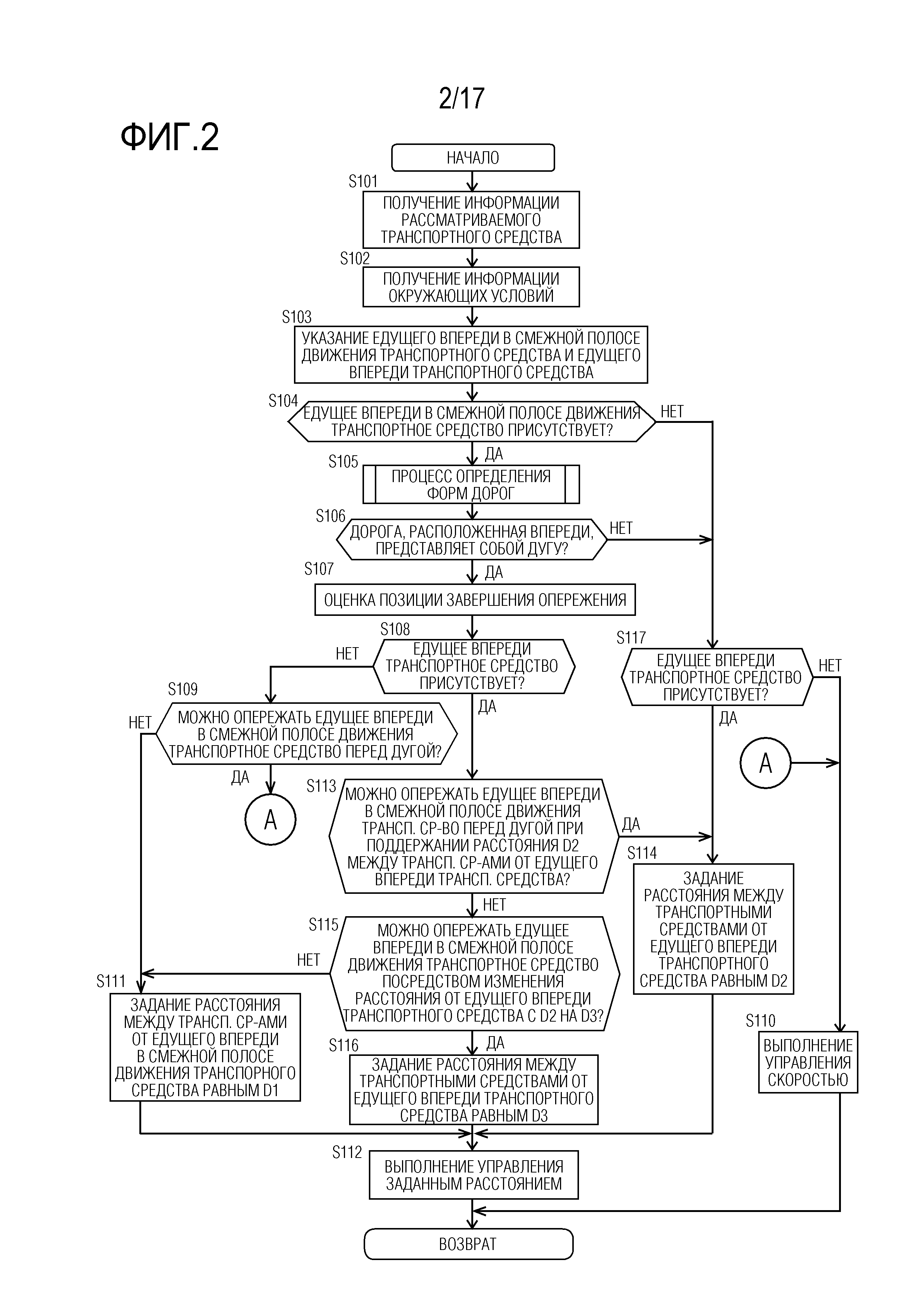
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ управления движением транспортного средства и устройство управления движением
Способ для управления движением и устройство для управления движением транспортного средства

