Результат интеллектуальной деятельности: УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ И СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при парковке и к устройству помощи при парковке.
Уровень техники
[0002] Известны системы помощи при парковке, которые предоставляют помощь при парковке в точном продвижении транспортного средства в инфраструктурный объект подачи мощности (см. патентный документ 1). Система помощи при парковке, раскрытая в патентном документе 1, отображает первое изображение задней стороны позади транспортного средства на модуле отображения, формирует второе изображение, включающее в себя информацию относительно позиционирования, которая не может получаться из первого изображения, когда расстояние между транспортным средством и целевой позицией для парковки меньше предварительно определенного значения, и начинает отображение второго изображения на модуле отображения.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Патент (Япония) номер 5377119
Сущность изобретения
[0004] Второе изображение в патентном документе 1 показывает расстояние между модулем приема мощности и модулем подачи мощности, но не указывает направление или угол смещения между модулями. Это может смущать пользователя касательно того, в каком направлении должно перемещаться транспортное средство во время совмещения катушек.
[0005] С учетом вышеизложенной проблемы, настоящее изобретение предоставляет способ помощи при парковке и устройство помощи при парковке для предоставления пользователю средства простого распознавания относительной позиции между наземной катушкой и катушкой транспортного средства в правильное время, которое требует пользователь.
Решение задачи
[0006] Аспект настоящего изобретения представляет собой способ помощи при парковке для предоставления помощи при парковке при парковке транспортного средства на пространстве для парковки, оснащенном наземной катушкой для подачи электрической мощности через беспроводное соединение в катушку транспортного средства, смонтированную на транспортном средстве, причем, по меньшей мере, две наземные метки указывают позицию наземной катушки и парковочной рамки, при этом изображение "с высоты птичьего полета", включающее в себя транспортное средство и периферию транспортного средства при просмотре сверху транспортного средства, переключается на укрупненное изображение, показывающее относительную позицию между наземной катушкой и катушкой транспортного средства в более крупном масштабе, чем изображение "с высоты птичьего полета", когда абсолютное значение относительного угла прямой линии, соединяющей наземные метки, по отношению к прямой линии, проходящей через центр катушки транспортного средства и параллельной направлению ширины транспортного средства транспортного средства, составляет предварительно определенное значение или меньше.
Преимущества изобретения
[0007] Аспект настоящего изобретения может предоставлять пользователю средство простого распознавания относительной позиции между наземной катушкой и катушкой транспортного средства в правильное время, которое требует пользователь.
Краткое описание чертежей
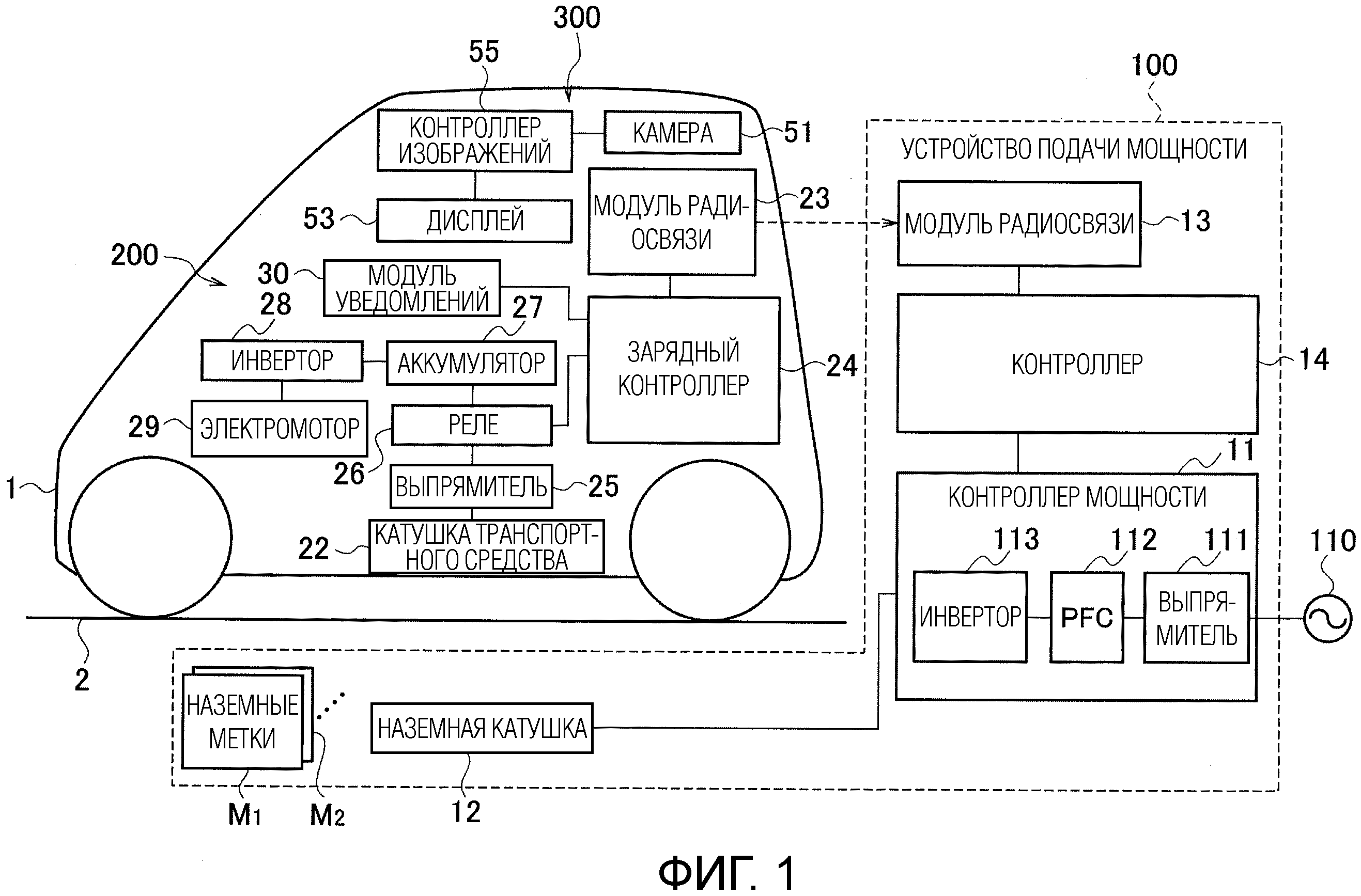
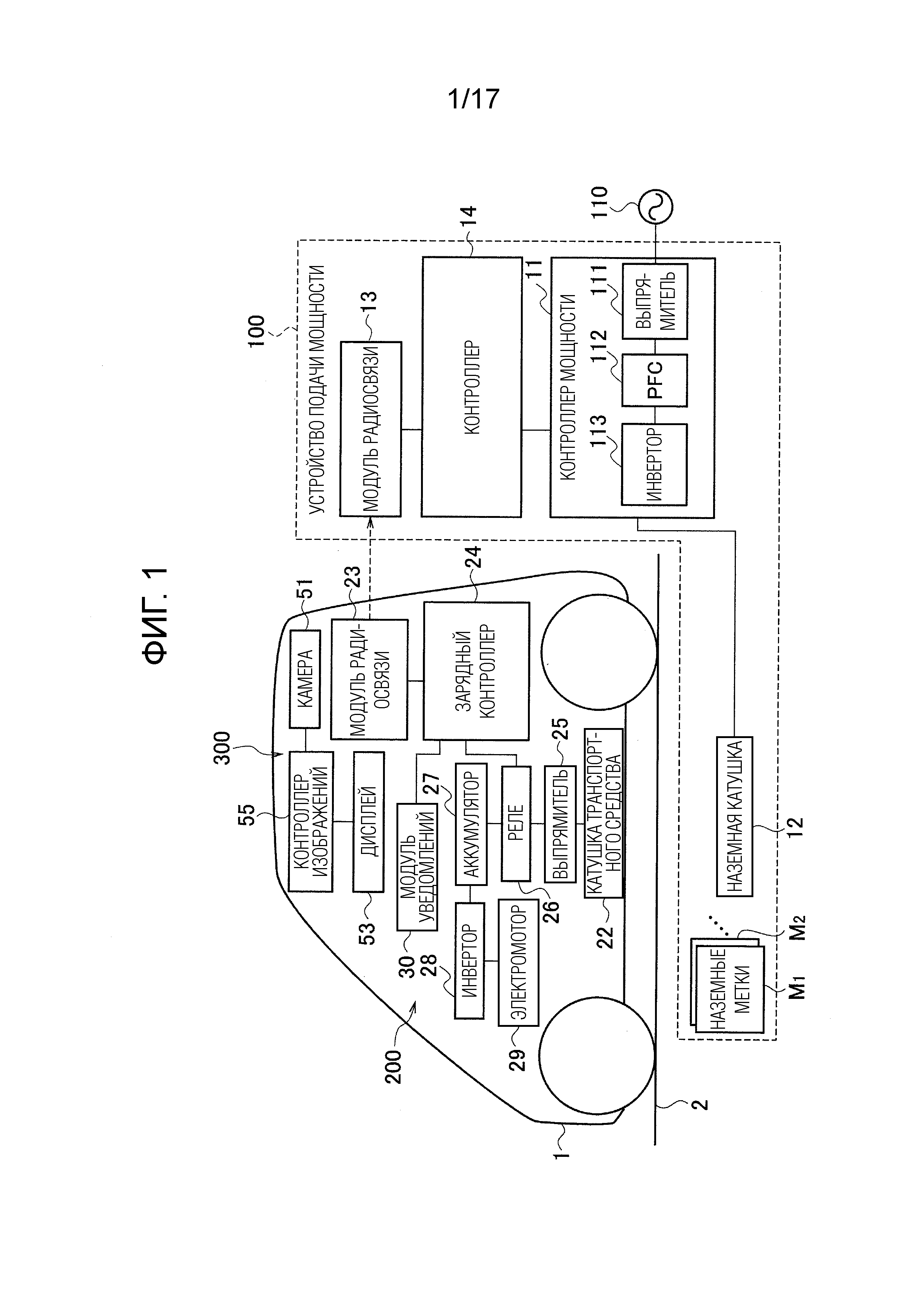
[0008] Фиг. 1 является блок-схемой, показывающей полную конфигурацию системы беспроводной подачи мощности, включающей в себя устройство помощи при парковке согласно варианту осуществления.
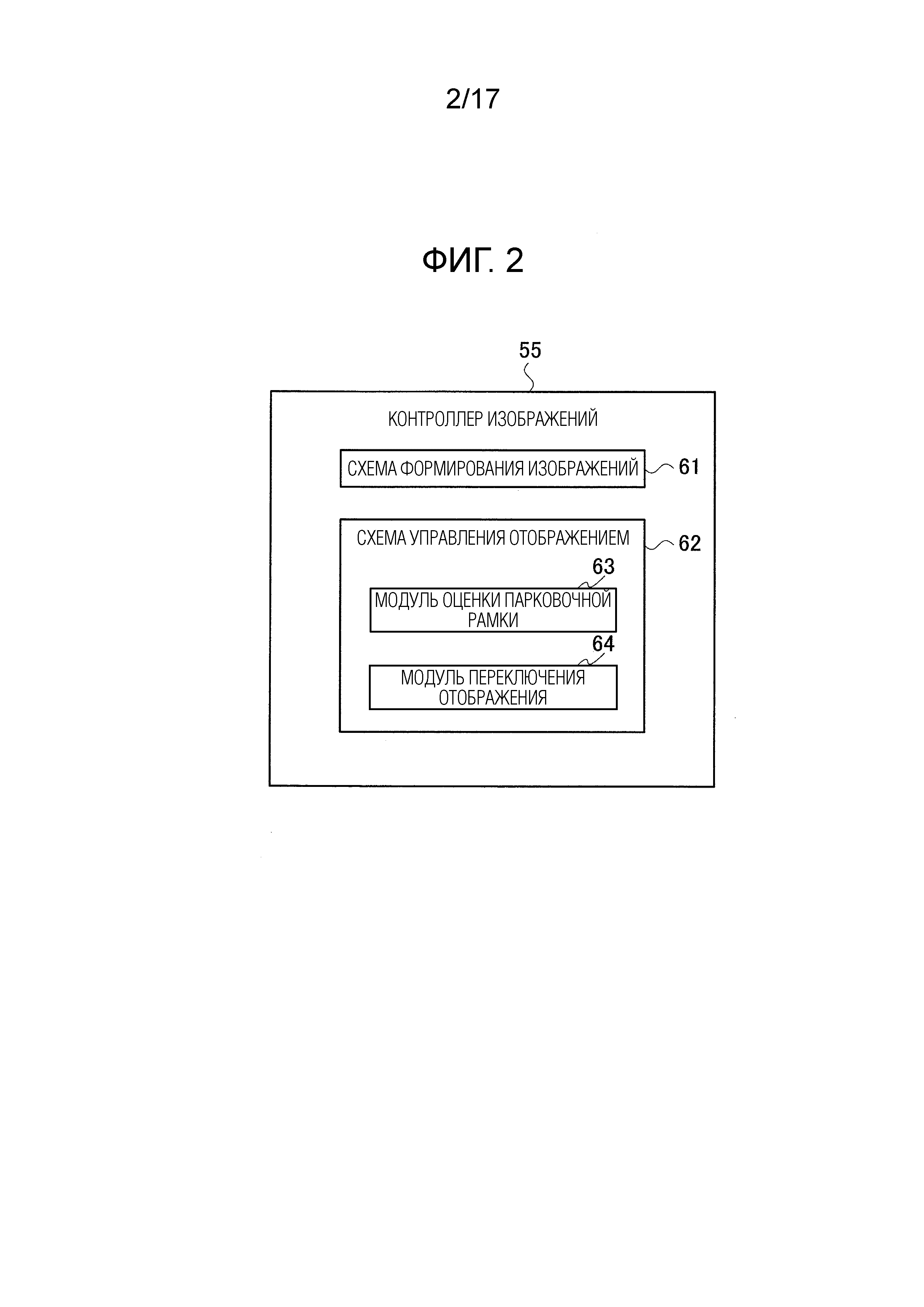
Фиг. 2 является блок-схемой, показывающей конкретную конфигурацию контроллера 55 изображений.
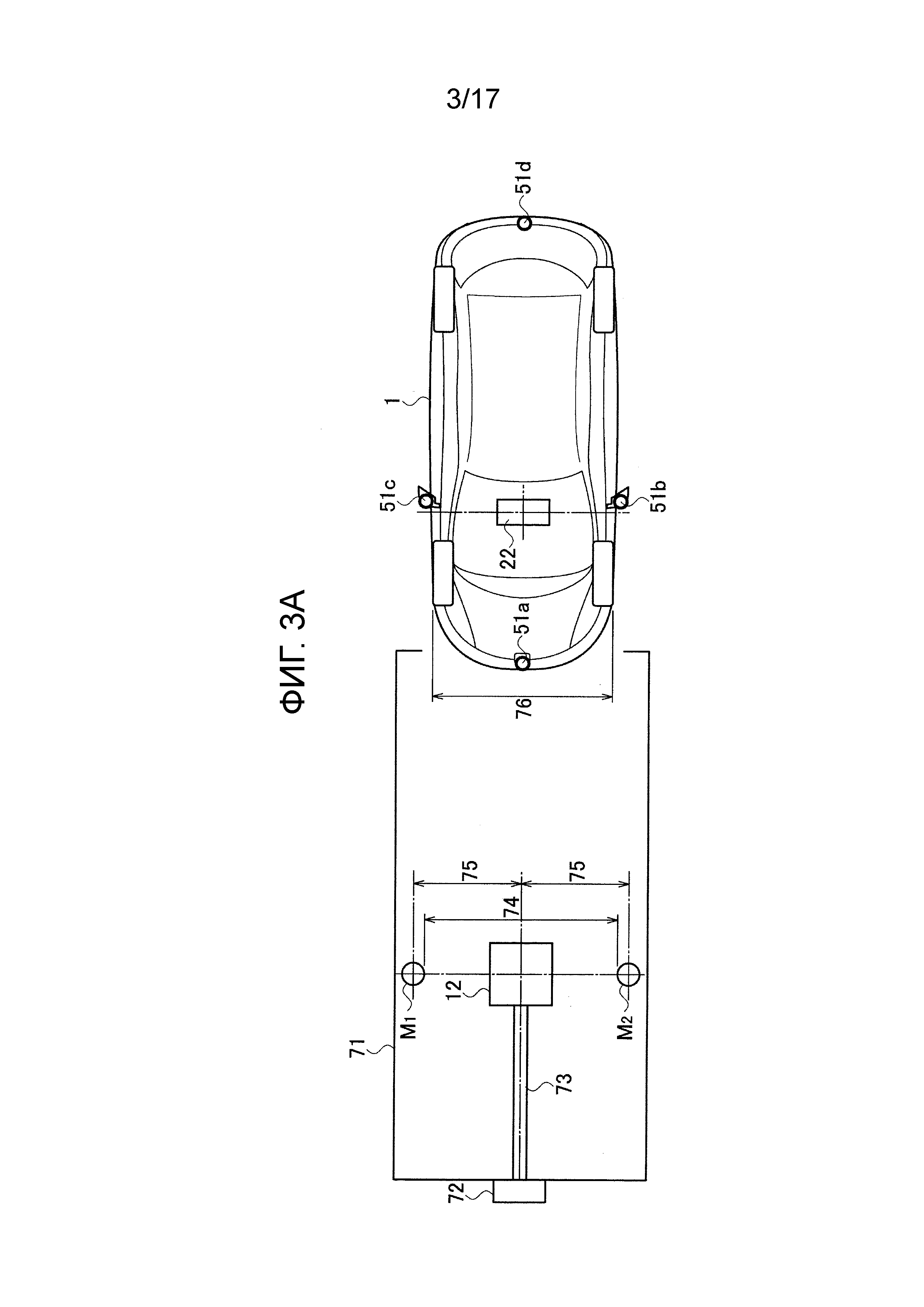
Фиг. 3A является видом сверху, иллюстрирующим парковку передним ходом транспортного средства 1, перемещающегося вперед, чтобы въезжать на пространство для парковки, оснащенное устройством 100 подачи мощности.
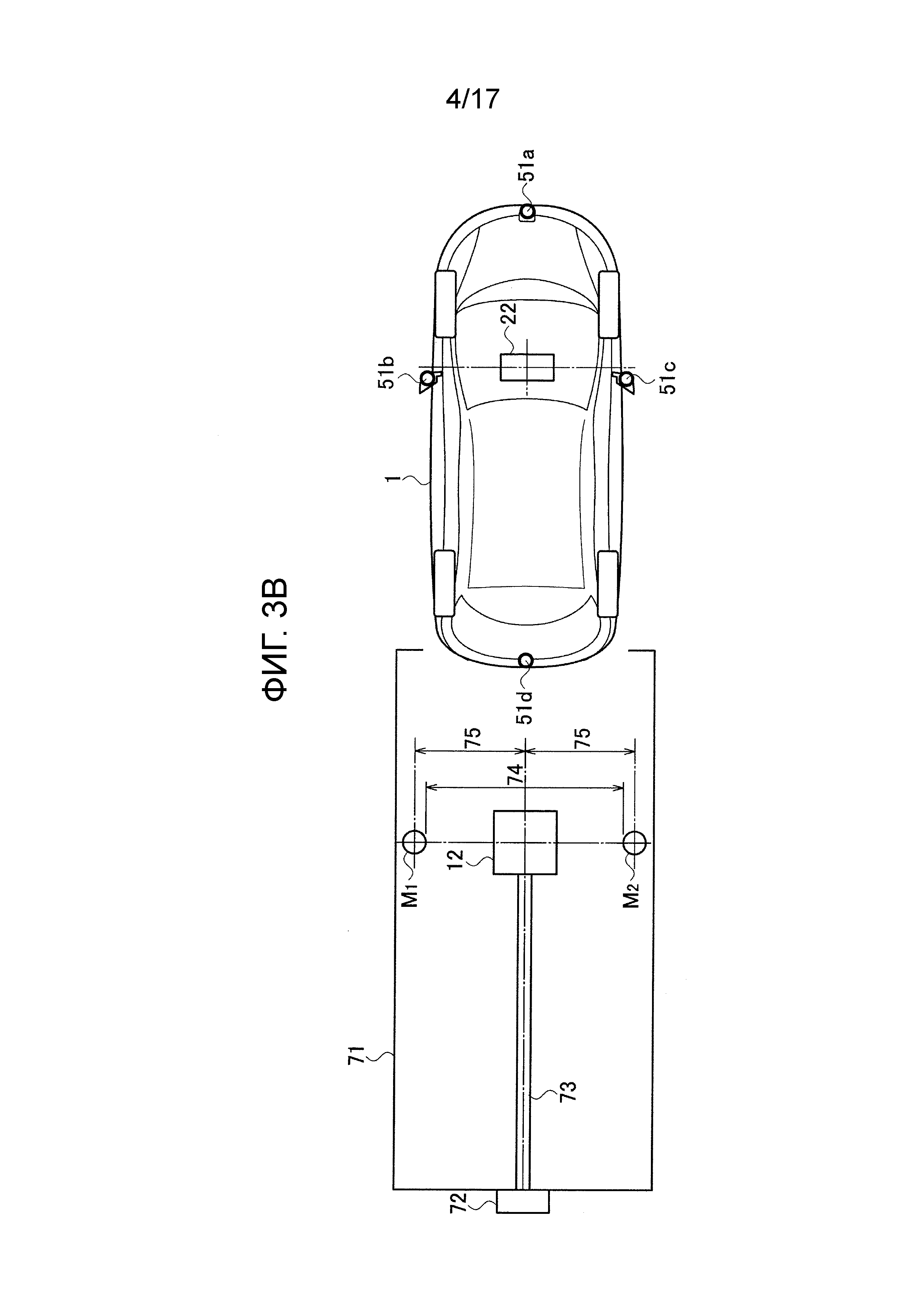
Фиг. 3B является видом сверху, иллюстрирующим парковку задним ходом транспортного средства 1, перемещающегося назад, чтобы въезжать на пространство для парковки, оснащенное устройством 100 подачи мощности.
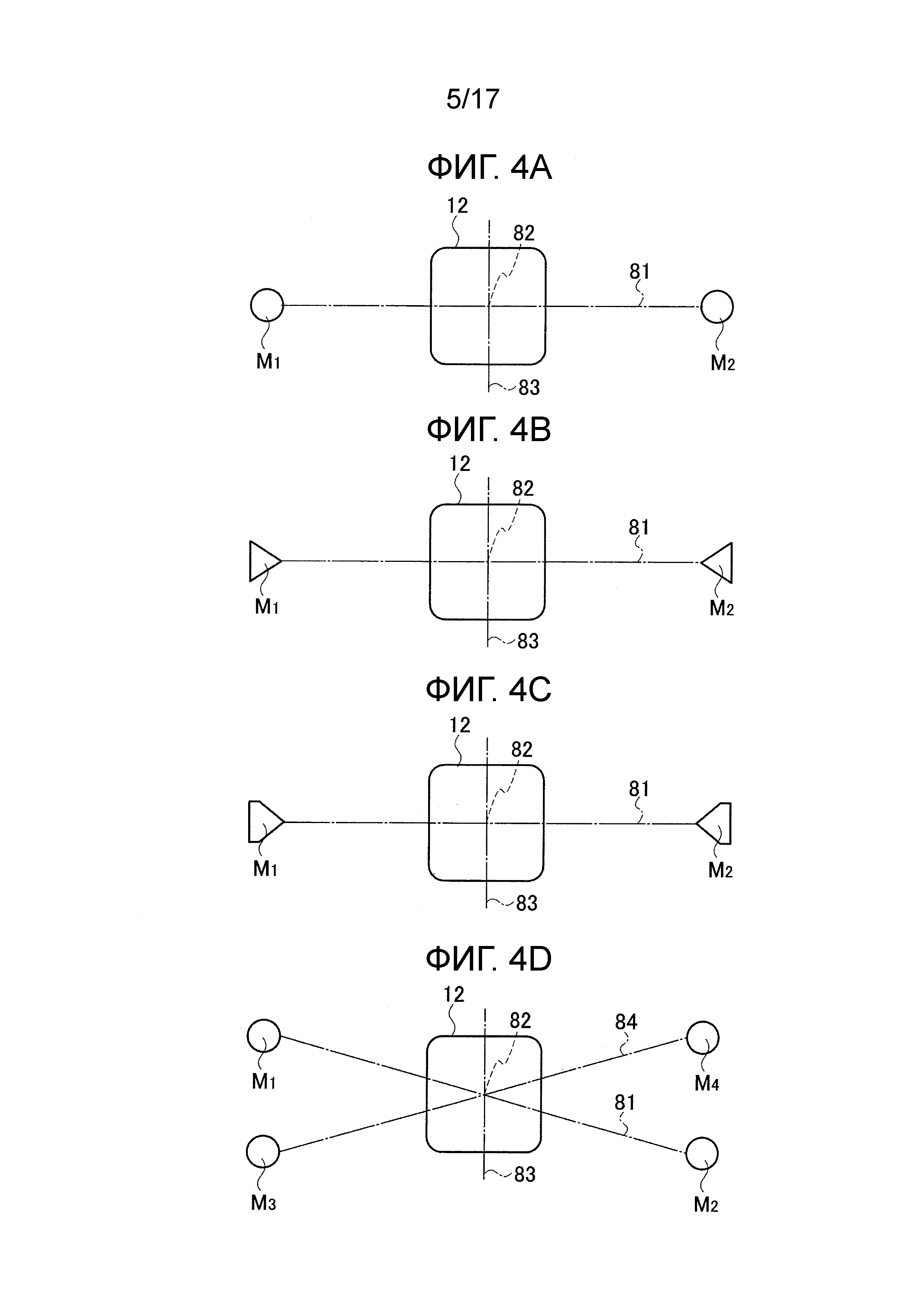
Фиг. 4A является видом, показывающим первый пример наземных меток (M1, M2).
Фиг. 4B является видом, показывающим второй пример наземных меток (M1, M2).
Фиг. 4C является видом, показывающим третий пример наземных меток (M1, M2).
Фиг. 4D является видом, показывающим четвертый пример наземных меток (M1, M2, M3, M4).
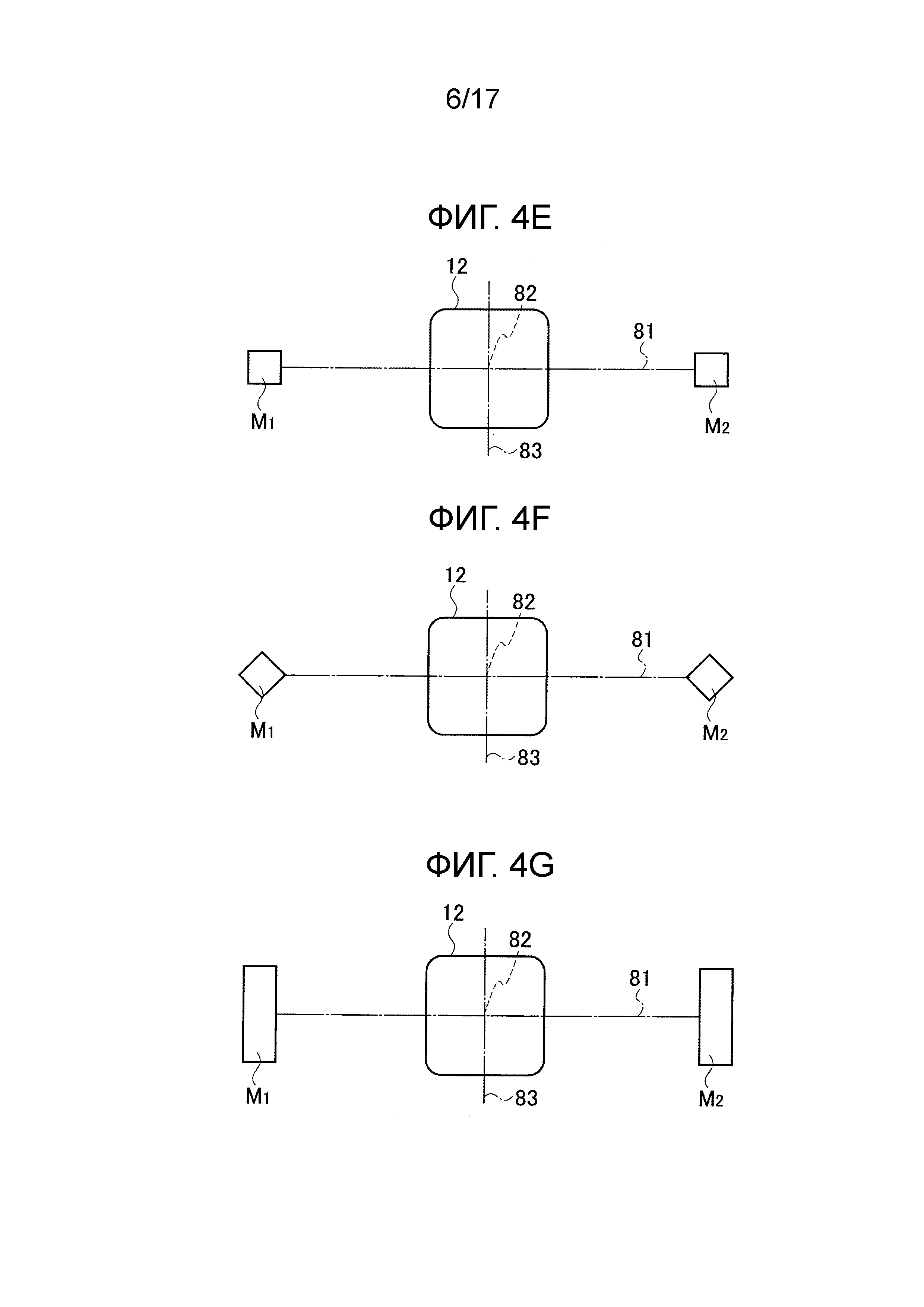
Фиг. 4E является видом, показывающим пятый пример наземных меток (M1, M2).
Фиг. 4F является видом, показывающим шестой пример наземных меток (M1, M2).
Фиг. 4G является видом, показывающим седьмой пример наземных меток (M1, M2).
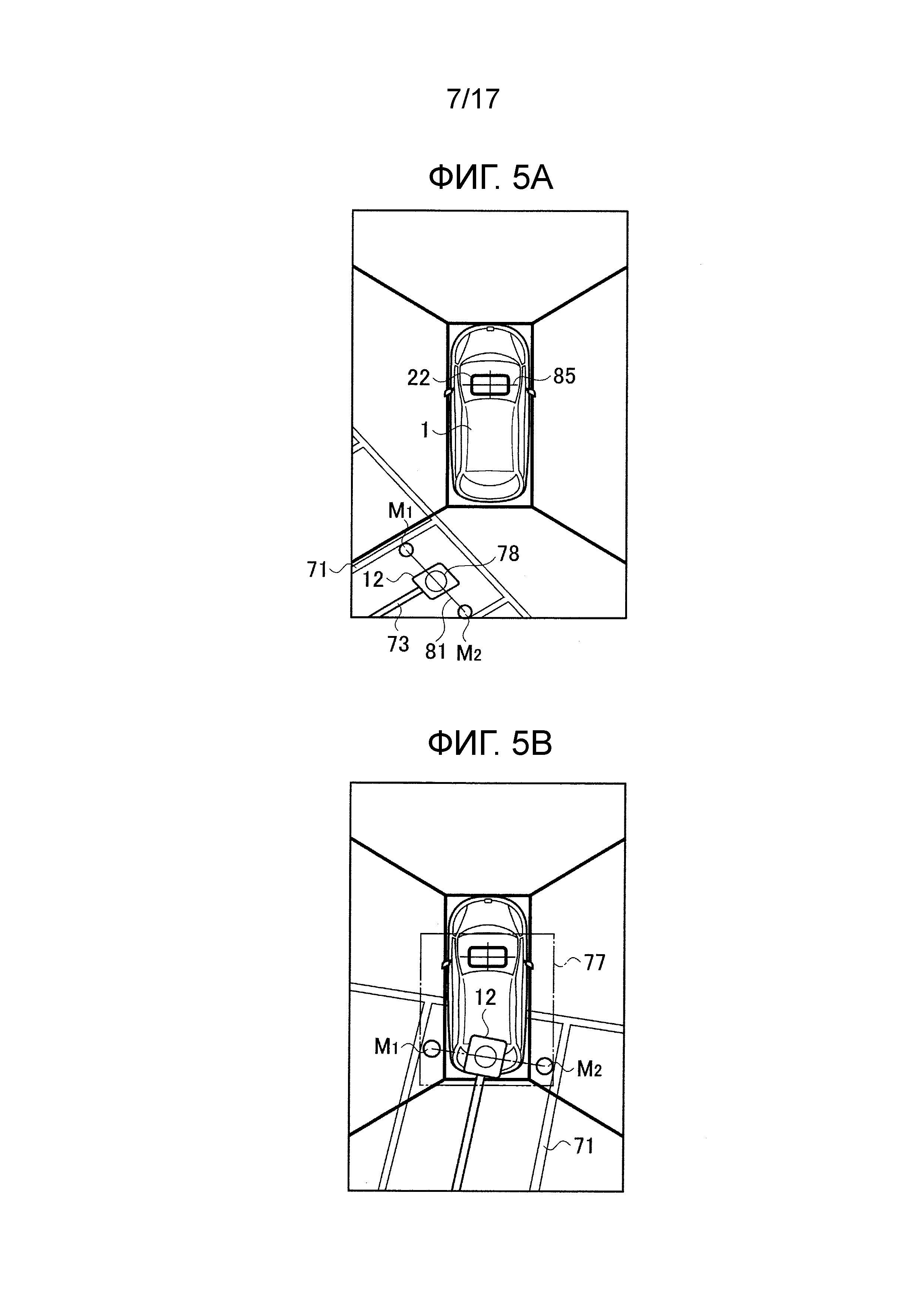
Фиг. 5A является видом, показывающим изображение "с высоты птичьего полета", которое является видом сверху для мониторинга кругового обзора (AVM), отображаемым на дисплее 53 на ранней стадии операции помощи при парковке.
Фиг. 5B является видом, показывающим изображение "с высоты птичьего полета" (AVM-вид сверху), отображаемое на дисплее 53, в котором транспортное средство 1 перемещается ближе к пространству для парковки, чем на фиг. 5A, с тем чтобы уменьшать относительный угол транспортного средства 1 по отношению к парковочной рамке 71.
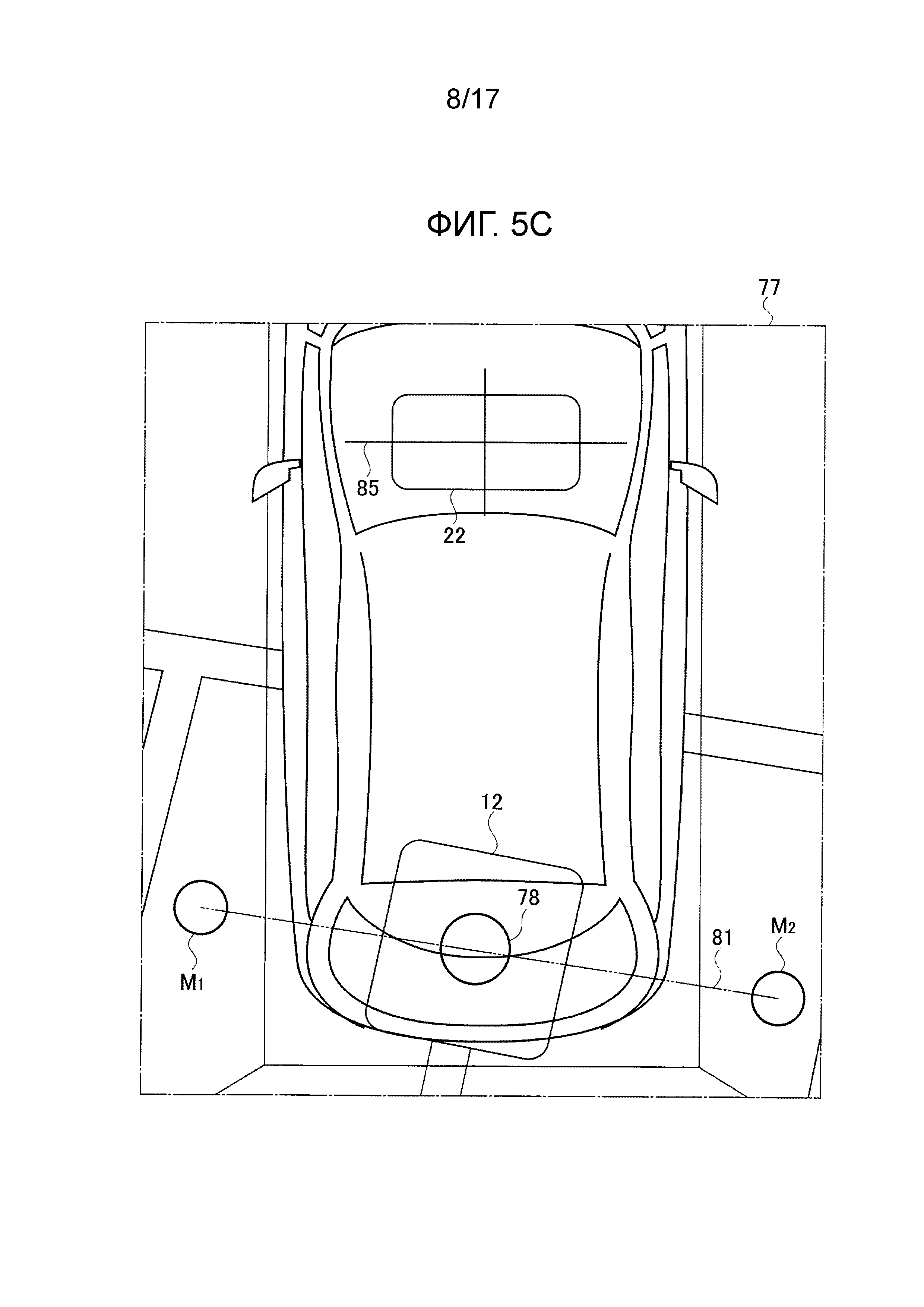
Фиг. 5C является видом, показывающим укрупненное изображение относительной позиции между наземной катушкой 12 и катушкой 22 транспортного средства в более крупном масштабе, чем изображение "с высоты птичьего полета", показанное на фиг. 5A и фиг. 5B.
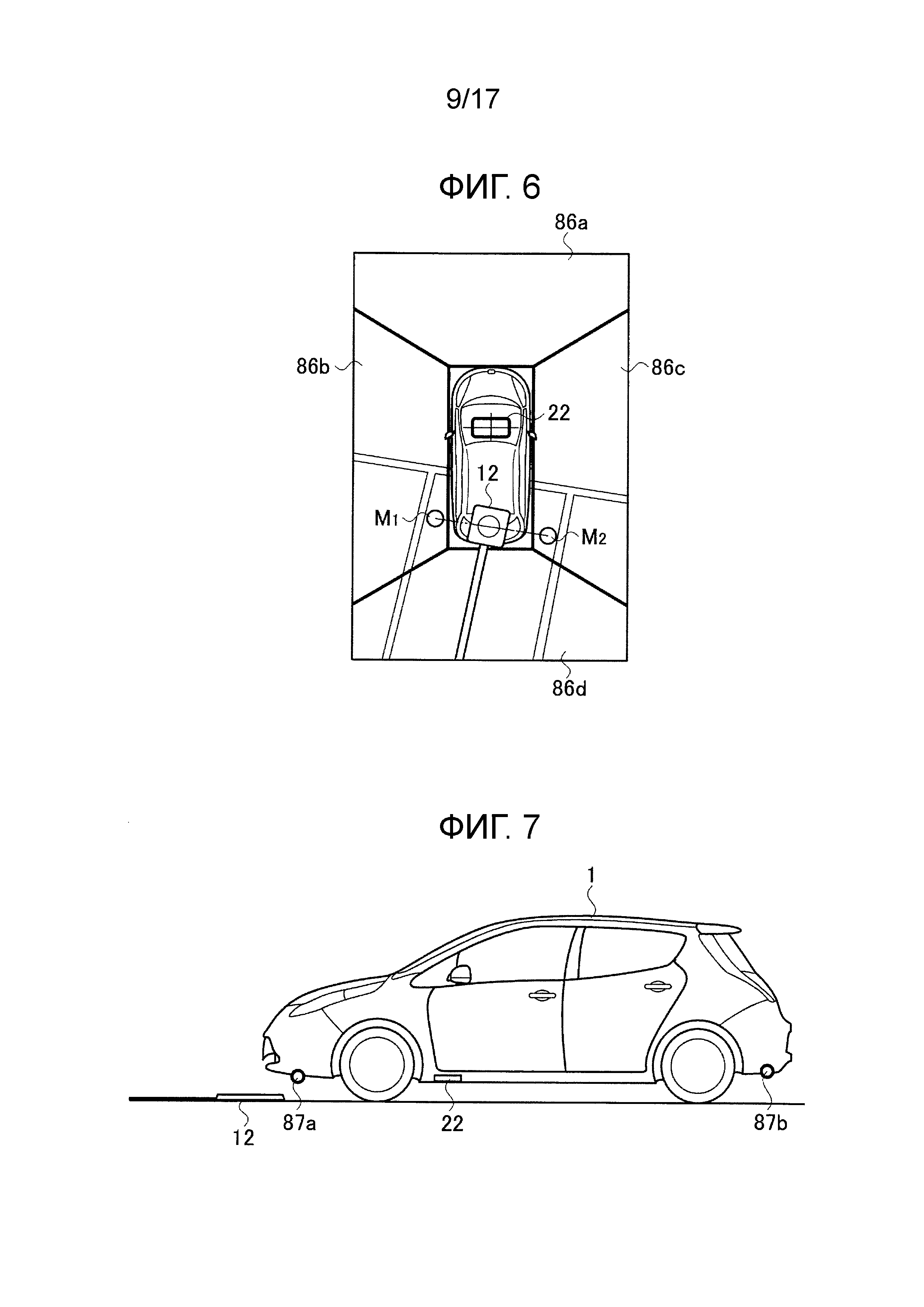
Фиг. 6 является видом, показывающим изображение "с высоты птичьего полета" (AVM-вид сверху), отображаемое на дисплее 53, разделенном на четыре области (86a-86d), соответствующие камерам (51a-51d).
Фиг. 7 является видом сбоку, показывающим пример компоновки вспомогательных катушек (87a, 87b), смонтированных на транспортном средстве 1.
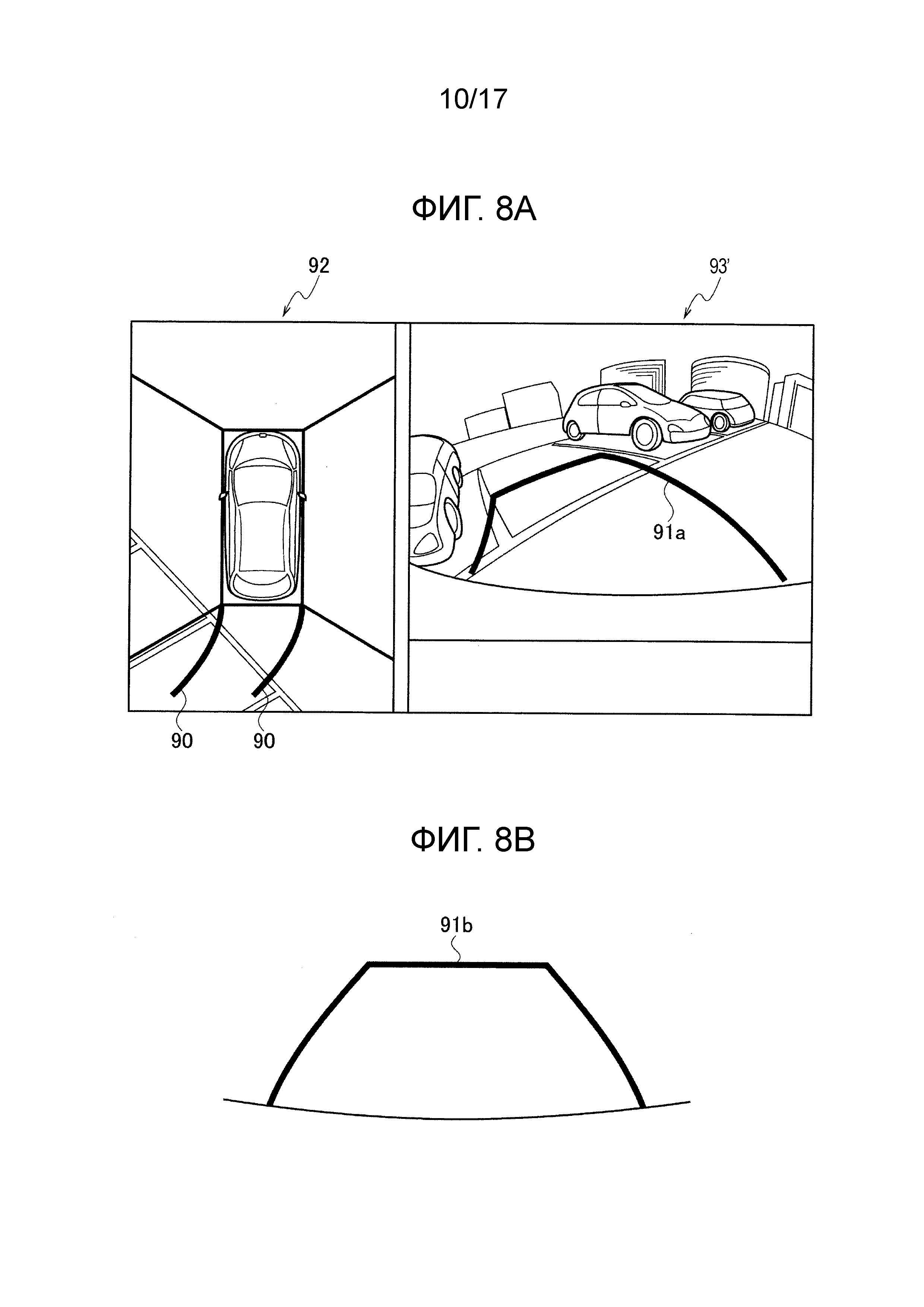
Фиг. 8A является видом, показывающим линии (90, 91a) оцененного курса, наложенные на изображение 92 "с высоты птичьего полета" и снятое камерой изображение 93'.
Фиг. 8B является видом, показывающим линии 91b оцененного курса, обозначающие прямое перемещение, наложенные на снятое камерой изображение 93'.
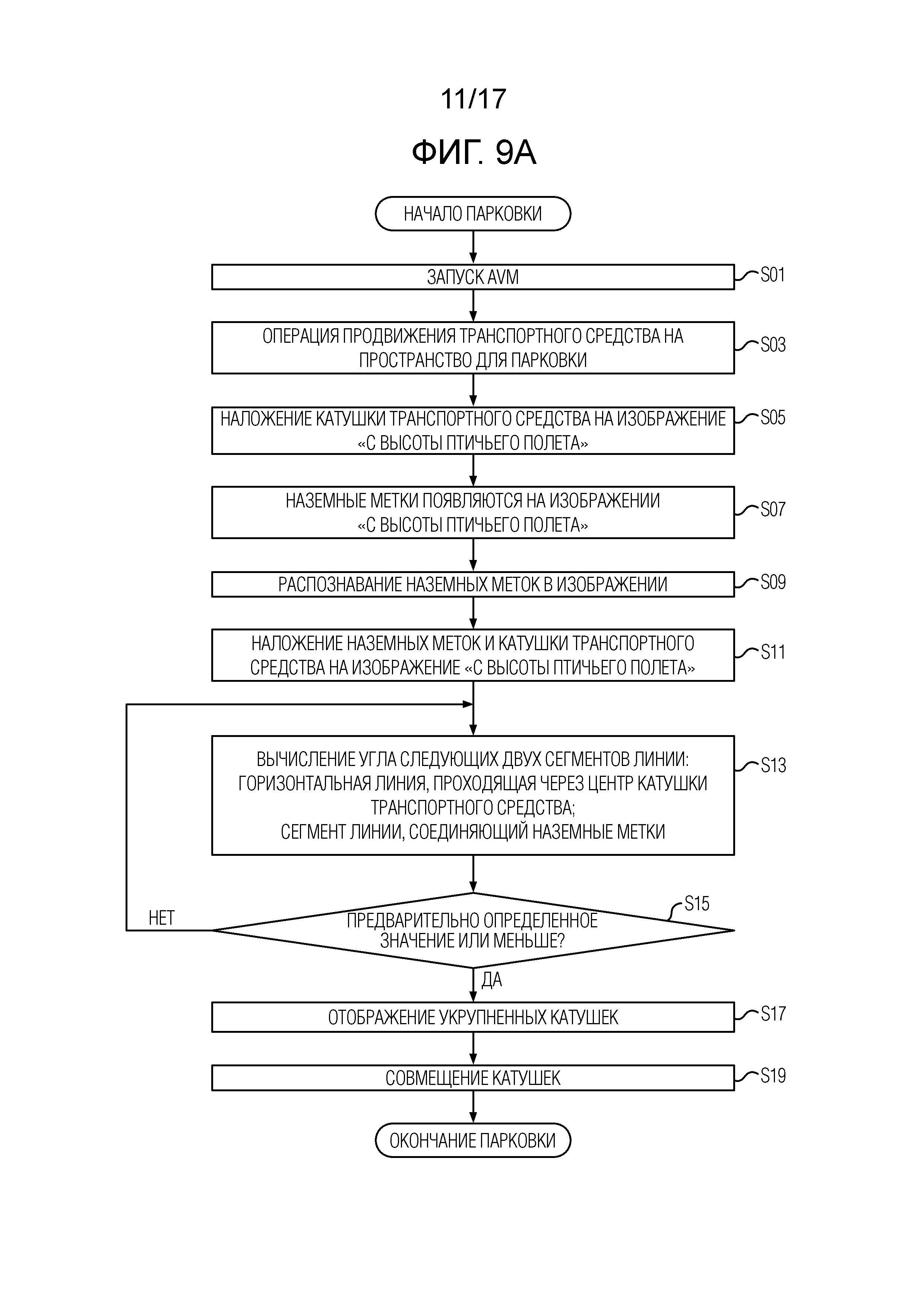
Фиг. 9A является блок-схемой последовательности операций, иллюстрирующей способ помощи при парковке согласно первому варианту осуществления.
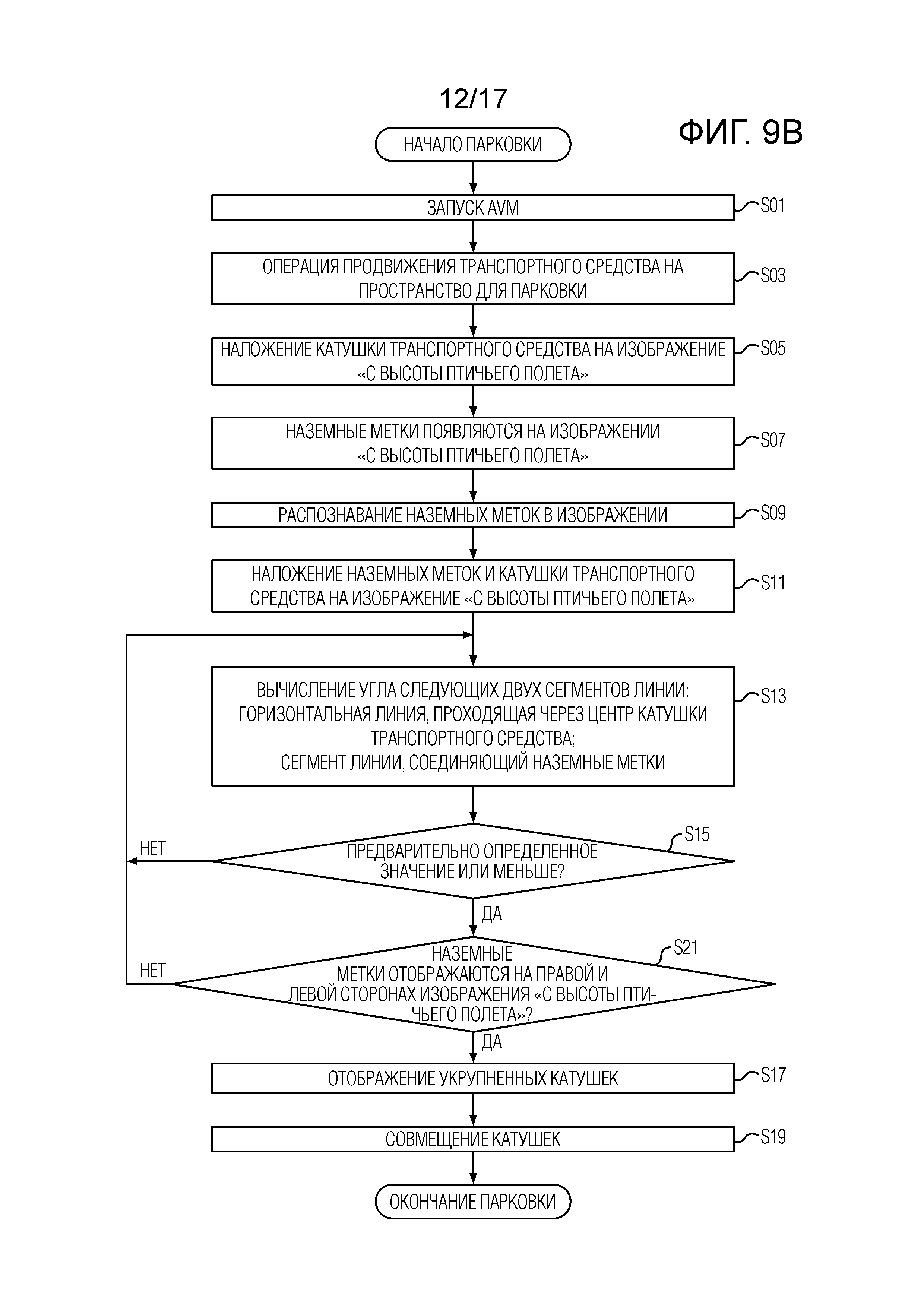
Фиг. 9B является блок-схемой последовательности операций, иллюстрирующей способ помощи при парковке согласно второму варианту осуществления.
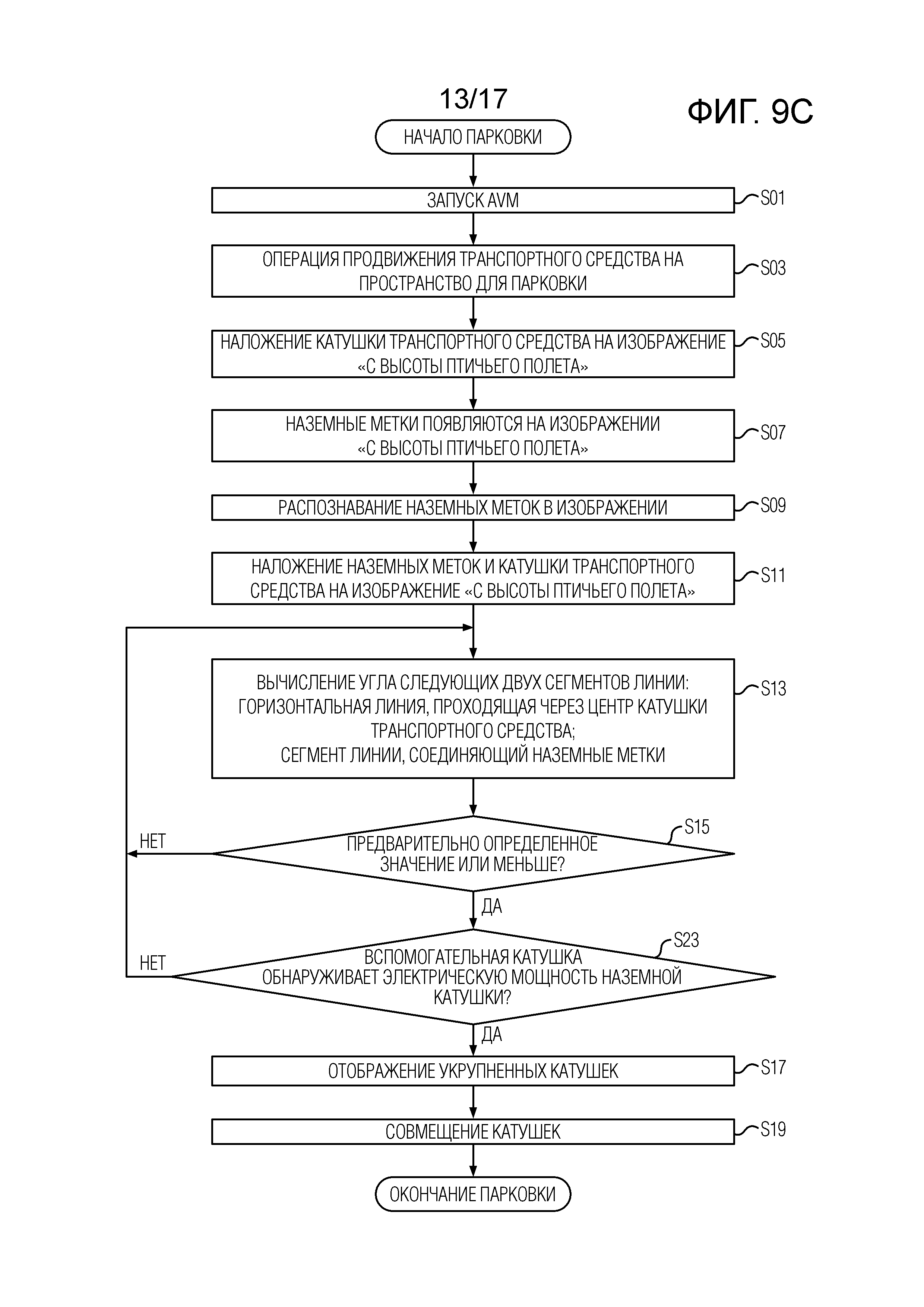
Фиг. 9C является блок-схемой последовательности операций, иллюстрирующей способ помощи при парковке согласно третьему варианту осуществления.
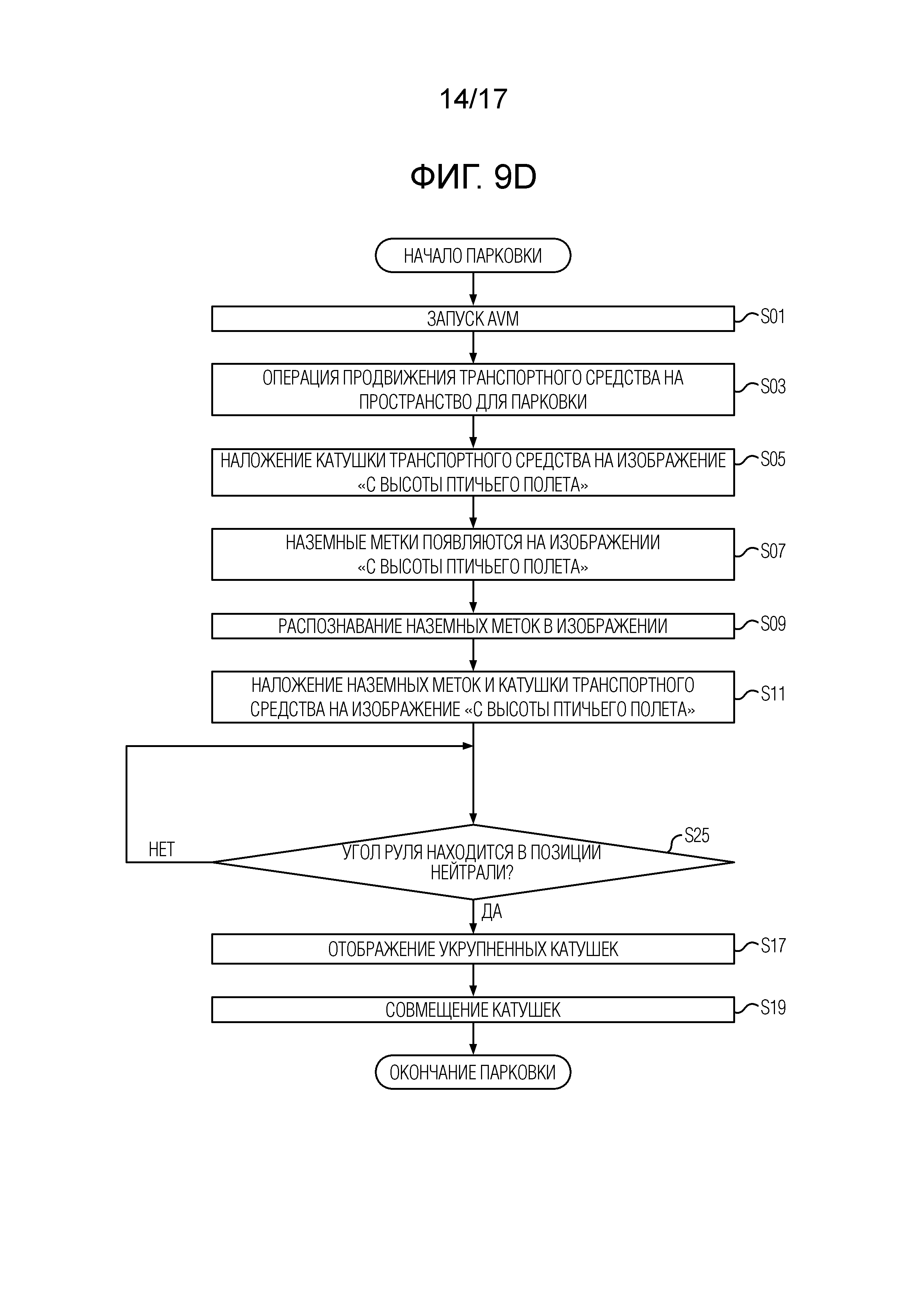
Фиг. 9D является блок-схемой последовательности операций, иллюстрирующей способ помощи при парковке согласно четвертому варианту осуществления.
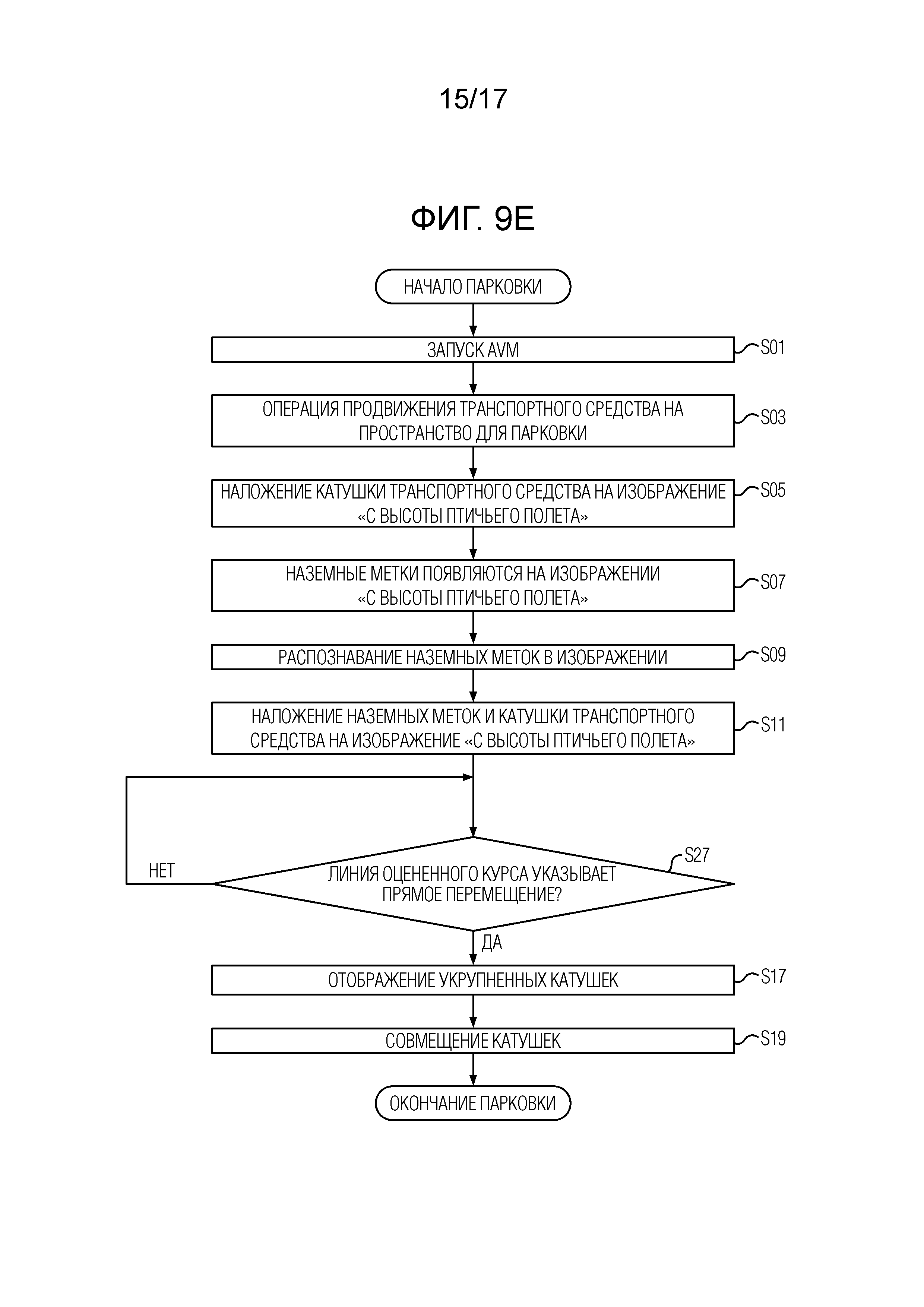
Фиг. 9E является блок-схемой последовательности операций, иллюстрирующей способ помощи при парковке согласно пятому варианту осуществления.
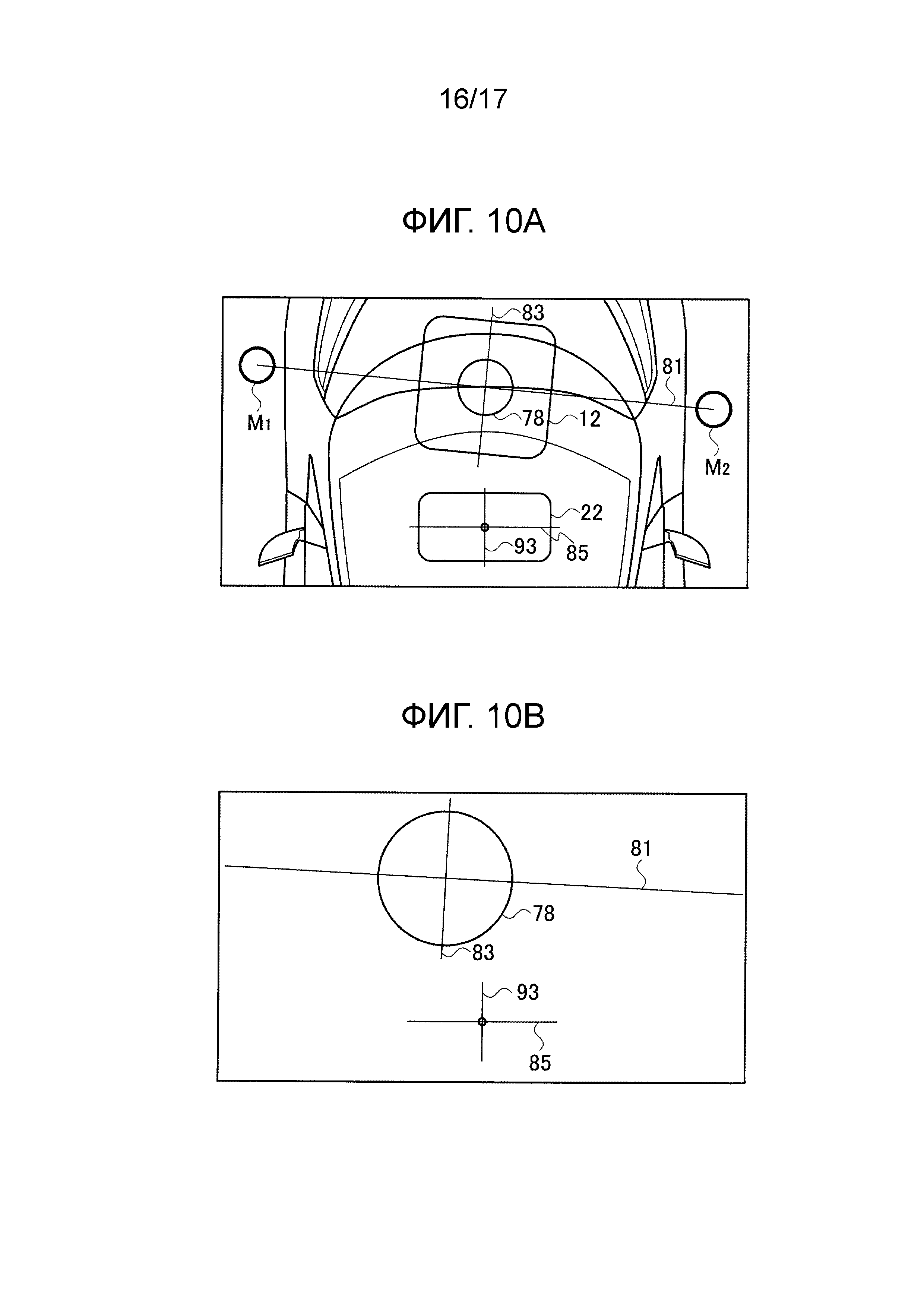
Фиг. 10A является видом укрупненного изображения, иллюстрирующего парковку передним ходом.
Фиг. 10B является видом укрупненного изображения, иллюстрирующего парковку передним ходом.
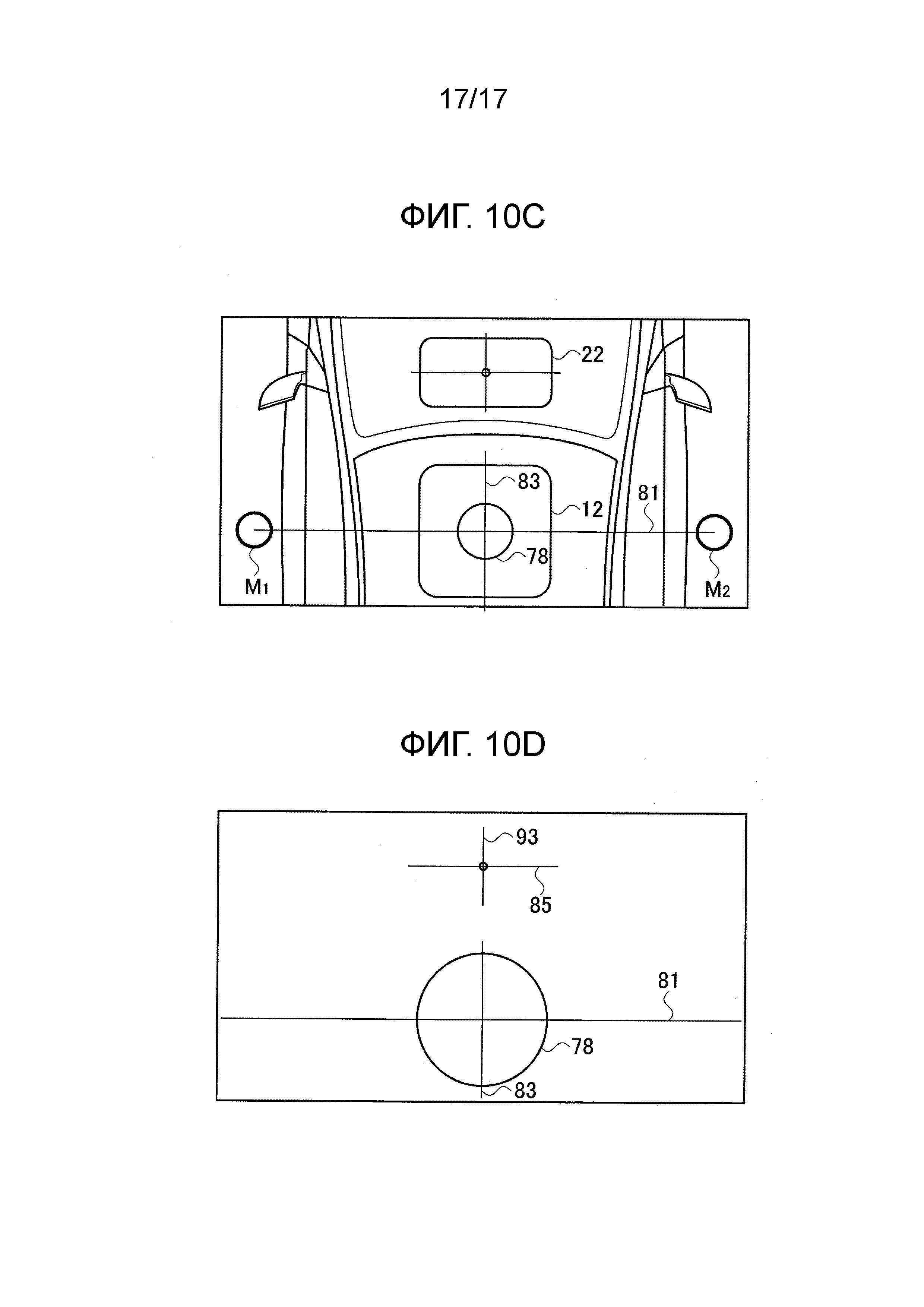
Фиг. 10C является видом укрупненного изображения, иллюстрирующего парковку задним ходом.
Фиг. 10D является видом укрупненного изображения, иллюстрирующего парковку задним ходом.
Подробное описание вариантов осуществления
[0009] Первый вариант осуществления
Ниже подробно описывается вариант осуществления со ссылкой на чертежи.
[0010] Ниже описывается полная конфигурация системы беспроводной подачи мощности, включающей в себя устройство помощи при парковке согласно этому варианту осуществления, со ссылкой на фиг. 1. Система беспроводной подачи мощности включает в себя устройство 100 подачи мощности, которое представляет собой модуль на стороне земли, устройство 200 приема мощности, которое представляет собой модуль на стороне транспортного средства, и устройство 300 помощи при парковке. Система беспроводной подачи мощности подает электрическую мощность через беспроводное соединение из устройства 100 подачи мощности, размещенного в станции подачи мощности, например, в устройство 200 приема мощности, установленное в транспортном средстве 1, такое как электротранспортное средство или гибридное транспортное средство, с тем чтобы заряжать аккумулятор, смонтированный на транспортном средстве 1. Устройство 300 помощи при парковке помогает пользователю в позиционировании транспортного средства 1 и в совмещении катушек, когда пользователь паркует транспортное средство 1 на пространстве для парковки, оснащенном устройством 100 подачи мощности.
[0011] Устройство 100 подачи мощности включает в себя наземную катушку 12, размещенную на пространстве 2 для парковки рядом со станцией подачи мощности, и, по меньшей мере, две наземные метки (M1, M2), указывающие позицию наземной катушки 12. Устройство 200 приема мощности включает в себя катушку 22 транспортного средства, смонтированную на базе транспортного средства 1. Катушка 22 транспортного средства позиционируется таким образом, что она располагается напротив наземной катушки 12, когда транспортное средство 1 паркуется в предварительно определенной позиции остановки на пространстве для парковки.
[0012] Наземная катушка 12 представляет собой первичную катушку, изготовленную из токоведущего провода, так что она служит в качестве катушки для передачи мощности для передачи электрической мощности в катушку 22 транспортного средства. Катушка 22 транспортного средства представляет собой вторичную катушку, изготовленную из токоведущего провода, так что она служит в качестве катушки для приема мощности для приема электрической мощности, передаваемой из наземной катушки 12. Электрическая мощность подается из наземной катушки 12 в катушку 22 транспортного средства беспроводным способом через электромагнитную индукцию между наземной катушкой 12 и катушкой 22 транспортного средства.
[0013] Устройство 100 подачи мощности на стороне земли включает в себя контроллер 11 мощности, наземную катушку 12, модуль 13 радиосвязи и контроллер 14.
[0014] Контроллер 11 мощности представляет собой схему для преобразования мощности переменного тока, передаваемой из источника 110 мощности переменного тока, в высокочастотную мощность переменного тока и передачи преобразованной мощности в наземную катушку 12. Контроллер 11 мощности включает в себя выпрямитель 111, схему 112 коррекции коэффициента мощности (PFC) и инвертор 113.
[0015] Выпрямитель 111 представляет собой схему, электрически соединенную с источником 110 мощности переменного тока, чтобы выпрямлять мощность переменного тока, выводимую из источника 110 мощности переменного тока. PFC-схема 112 соединяется между выпрямителем 111 и инвертором 113, чтобы реализовывать коррекцию коэффициента мощности посредством выпрямления форм сигналов, выводимых из выпрямителя 111. Инвертор 113 включает в себя схему управления с широтно-импульсной модуляцией (PWM), включающую в себя переключающее устройство, такое как биполярный транзистор с изолированным затвором (IGBT), чтобы преобразовывать мощность постоянного тока в мощность переменного тока в соответствии с сигналом управления переключением таким образом, чтобы подавать мощность переменного тока в наземную катушку 12.
[0016] Модуль 13 радиосвязи обменивается данными с модулем 23 радиосвязи, установленным на стороне транспортного средства 1.
[0017] Контроллер 14 управляет всем устройством 100 подачи мощности и, в частности, управляет связью между соответствующими модулями 13 и 23 радиосвязи. Например, контроллер 14 передает сигнал для начала подачи мощности из устройства 100 беспроводной подачи мощности в транспортное средство 1 и принимает, со стороны транспортного средства 1, сигнал запроса для запроса подачи мощности из устройства 100 беспроводной подачи мощности. Контроллер 14 также управляет операцией переключения инвертора 113 и регулирует электрическую мощность, передаваемую из наземной катушки 12.
[0018] Устройство 200 приема мощности на стороне транспортного средства 1 включает в себя катушку 22 транспортного средства, модуль 23 радиосвязи, зарядный контроллер 24, выпрямитель 25, реле 26, аккумулятор 27, инвертор 28, электромотор 29 и модуль 30 уведомлений.
[0019] Катушка 22 транспортного средства позиционируется непосредственно над наземной катушкой 12 и отделяется на предварительно определенное расстояние от наземной катушки 12, когда транспортное средство 1 паркуется в предварительно определенной позиции для парковки на пространстве 2 для парковки.
[0020] Модуль 23 радиосвязи обменивается данными с модулем 13 радиосвязи, установленным на стороне устройства 100 подачи мощности.
[0021] Зарядный контроллер 24 управляет операцией заряда аккумулятора 27 и дополнительно управляет, например, модулем 23 радиосвязи, модулем 30 уведомлений и реле 26. Зарядный контроллер 24 передает сигнал запроса для запроса начала заряда через связь между модулями 13 и 23 радиосвязи после того, как транспортное средство паркуется, и совмещение катушек заканчивается.
[0022] Выпрямитель 25 представляет собой выпрямительную схему, соединенную с катушкой 22 транспортного средства, чтобы выпрямлять мощность переменного тока, принимаемую посредством катушки 22 транспортного средства, в мощность постоянного тока.
[0023] Реле 26 включает в себя релейный переключатель, который включается/выключается в соответствии с управлением посредством зарядного контроллера 24. Реле 26 отсоединяет главную схемную систему, включающую в себя аккумулятор 27, от зарядной схемы, включающей в себя катушку 22 транспортного средства и выпрямитель 25, когда релейный переключатель выключается.
[0024] Аккумулятор 27 включает в себя множество вторичных аккумуляторов, соединенных друг с другом, так что они служат в качестве источника мощности транспортного средства 1.
[0025] Инвертор 28 включает в себя схему PWM-управления, включающую в себя переключающее устройство, такое как IGBT. Инвертор 28 преобразует мощность постоянного тока, выводимую из аккумулятора 27, в мощность переменного тока и подает преобразованную мощность в электромотор 29.
[0026] Электромотор 29 представляет собой, например, трехфазный электромотор переменного тока, служащий в качестве источника мощности приведения в движение для приведения в движение транспортного средства 1.
[0027] Модуль 30 уведомлений включает в себя лампу аварийной сигнализации, дисплей для навигационной системы или динамик и выводит свет, изображения или голос к пользователю в соответствии с управлением посредством зарядного контроллера 24.
[0028] Система беспроводной подачи мощности, имеющая конфигурацию, описанную выше, проводит передачу и прием высокочастотной электрической мощности беспроводным способом через электромагнитную индукцию между наземной катушкой 12 и катушкой 22 транспортного средства. После того, как напряжение прикладывается к наземной катушке 12, возникает магнитное соединение между наземной катушкой 12 и катушкой 22 транспортного средства, так что электрическая мощность подается из наземной катушки 12 в катушку 22 транспортного средства.
[0029] Устройство 300 помощи при парковке включает в себя камеру 51 для захвата периферии транспортного средства 1, дисплей 53 для предоставления информации изображений, чтобы помогать пользователю (пассажиру транспортного средства 1) в позиционировании транспортного средства 1 и в совмещении катушек, и контроллер 55 изображений для управления информацией изображений.
[0030] Ниже описывается конкретная конфигурация контроллера 55 изображений со ссылкой на фиг. 2. Контроллер 55 изображений может представлять собой микрокомпьютер общего назначения, включающий в себя запоминающее устройство и модуль ввода-вывода. Компьютерная программа (программа помощи при парковке) устанавливается в контроллере 55 изображений таким образом, чтобы выполнять последовательность обработки информации, чтобы помогать в перемещении транспортного средства и в совмещении катушек. Контроллер 55 изображений, реализующий программу, служит в качестве схем (61, 62) обработки информации для выполнения последовательности обработки информации.
[0031] Хотя настоящий вариант осуществления проиллюстрирован для случая, в котором программное обеспечение устанавливается, чтобы изготавливать контроллер 55 изображений, следует понимать, что специализированные аппаратные средства, такие как специализированная интегральная схема (ASIC), могут использоваться, вместо микрокомпьютера общего назначения, для того чтобы составлять схемы (61, 62) обработки информации. Схемы (61, 62) обработки информации, включенные в контроллер 55 изображений, могут состоять из отдельных аппаратных средств. Контроллер 55 изображений также может служить в качестве электронного модуля управления (ECU), используемого для другой обработки управления в транспортном средстве 1.
[0032] Контроллер 55 изображений получает снятое камерой изображение захваченной периферии транспортного средства 1. Контроллер 55 изображений функционирует в качестве схемы 61 формирования изображений для формирования, из снятого камерой изображения, изображение "с высоты птичьего полета", включающее в себя транспортное средство 1 и периферию транспортного средства 1 при просмотре сверху транспортного средства 1, и функционирует в качестве схемы 62 управления отображением для управления изображениями, отображаемыми на дисплее 53.
[0033] Схема 61 формирования изображений использует традиционную технологию для того, чтобы формировать изображение "с высоты птичьего полета", полученное посредством преобразования угла снятого камерой изображения из позиции камеры 51 в позицию непосредственно над транспортным средством 1.
[0034] Схема 62 управления отображением включает в себя модуль 63 оценки парковочной рамки для оценки продольного направления парковочной рамки, по меньшей мере, из двух наземных меток (M1, M2), показанных в снятом камерой изображении, например, и модуль 64 переключения отображения для переключения изображений, отображаемых на дисплее 53, в зависимости от относительного угла между продольным направлением парковочной рамки и направлением спереди назад транспортного средства 1.
[0035] Модуль 64 переключения отображения переключается с изображения "с высоты птичьего полета" на укрупненное изображение, показывающее относительную позицию между наземной катушкой 12 и катушкой 22 транспортного средства в более крупном масштабе, чем изображение "с высоты птичьего полета", когда абсолютное значение относительного угла между продольным направлением парковочной рамки и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше. Модуль 64 переключения отображения отображает изображение "с высоты птичьего полета", сформированное посредством модуля 61 формирования изображений на дисплее 53, когда абсолютное значение относительного угла между продольным направлением парковочной рамки и направлением спереди назад транспортного средства 1 не составляет предварительно определенное значение или меньше. Модуль 64 переключения отображения отображает укрупненное изображение на дисплее 53, когда абсолютное значение относительного угла между продольным направлением парковочной рамки и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше.
[0036] Когда одно изображение отображается на дисплее 53, модуль 64 переключения отображения должен только переключать отображаемое изображение с изображения "с высоты птичьего полета" на укрупненное изображение. Когда два или более различных изображений отображаются с различными областями отображения на дисплее 53, модуль 64 переключения отображения может переключать степень укрупнения области отображения между изображением "с высоты птичьего полета" и отображаемым укрупненным изображением. Когда абсолютное значение относительного угла между продольным направлением парковочной рамки и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше, модуль 64 переключения отображения может переключать степень укрупнения таким образом, что укрупненное изображение имеет большую область отображения, чем изображение "с высоты птичьего полета".
[0037] Хотя этот вариант осуществления иллюстрирует случай, в котором контроллер 55 изображений устанавливается в транспортном средстве 1, контроллер 55 изображений может устанавливаться за пределами транспортного средства 1, к примеру, в устройстве 100 подачи мощности. В таком случае, снятое камерой изображение может получаться через связь между модулями 13 и 23 радиосвязи таким образом, чтобы управлять изображением, отображаемым на дисплее 53.
[0038] Как показано на фиг. 3A, парковочная рамка 71 предоставляется на поверхности дороги на пространстве для парковки, и наземная катушка 12 и наземные метки (M1, M2) размещаются в парковочной рамке 71. Наземная катушка 12 соединяется с одним концом кабеля 73 источника мощности, идущего в продольном направлении парковочной рамки 71, и другой конец кабеля 73 источника мощности соединяется с блоком 72 источника мощности, размещенным за пределами парковочной рамки 71. Устройство 100 подачи мощности, показанное на фиг. 1, за исключением наземной катушки 12 и наземных меток (M1, M2), размещается в блоке 72 источника мощности.
[0039] Центр наземной катушки 12 расположен в середине сегмента линии, соединяющего две наземных метки (M1, M2). Расстояния 75 между соответствующими центрами наземных меток (M1, M2) и центром наземной катушки 12 являются идентичными друг другу. Наземные метки (M1, M2) размещаются таким образом, что расстояние 74 между соответствующими внутренними концами наземных меток (M1, M2) превышает ширину 76 транспортного средства 1. Это предотвращает скрытие двух наземных меток (M1, M2) посредством транспортного средства 1, когда транспортное средство 1 въезжает в парковочную рамку 71, с тем чтобы указывать обе наземных метки (M1, M2) в снятом камерой изображении захваченной периферии транспортного средства 1. Сегмент линии, соединяющий наземные метки (M1, M2), является перпендикулярным продольному направлению парковочной рамки 71, которое представляет собой направление въезда транспортного средства 1.
[0040] Катушка 22 транспортного средства монтируется на базе транспортного средства 1. Когда транспортное средство 1 останавливается в предварительно определенной позиции остановки на пространстве для парковки (парковочной рамке 71), катушка 22 транспортного средства позиционируется непосредственно над наземной катушкой 12. Колесные колодки, которые не показаны на фиг. 3A или фиг. 3B, могут предоставляться в позициях, с которыми приводятся в контакт колеса транспортного средства 1, останавливающегося в предварительно определенной позиции остановки.
[0041] Транспортное средство 1 оснащено камерами (51a, 51b, 51c и 51d) на переднем конце, обоих боковых зеркалах заднего вида и заднем конце транспортного средства 1 для захвата изображений периферии транспортного средства 1. Изображения, захваченные посредством камер (51a, 51b, 51c и 51d), передаются в контроллер 55 изображений.
[0042] Как показано на фиг. 3B, этот вариант осуществления также использует конфигурацию для парковки задним ходом, которая является аналогичной конфигурации для парковки передним ходом, проиллюстрированной на фиг. 3A. Конфигурация для парковки задним ходом отличается от конфигурации для парковки передним ходом тем, что катушка 22 транспортного средства позиционируется ближе к стороне, в которую въезжает транспортное средство 1, чем в случае, показанном на фиг. 3A, когда транспортное средство 1 останавливается в предварительно определенной позиции остановки.
[0043] Ниже описываются примеры наземных меток (M1, M2) со ссылкой на фиг. 4A-4G. Форма наземных меток (M1, M2) может представлять собой любую из круглой формы, как показано на фиг. 4A, треугольной формы, как показано на фиг. 4B, пятиугольной формы, как показано на фиг. 4C, квадратной формы, как показано на фиг. 4E, ромбовидной формы, как показано на фиг. 4F, и прямоугольной формы, как показано на фиг. 4G. Число наземных меток (M1, M2) не ограничено двумя. Фиг. 4D иллюстрирует случай с использованием четырех наземных меток (M1, M2, M3, M4), в которых предоставляются две пары наземных меток (M1 и M2, M3 и M4). Центр наземной катушки 12 расположен в точке 82 пересечения сегмента 81 линии, соединяющего наземные метки (M1, M2), и прямой линии 84, соединяющей наземные метки (M3, M4).
[0044] Этот вариант осуществления проиллюстрирован для случая, в котором центр 82 наземной катушки 12 расположен в середине прямой линии 81, соединяющей наземные метки (M1, M2), но не ограничен этим случаем. Хотя не показано на чертежах, центр наземной катушки 12 может быть расположен в позиции, отстоящей от середины прямой линии 81, соединяющей наземные метки (M1, M2), на предварительно определенное расстояние в направлении, перпендикулярном прямой линии 81. Например, когда наземные метки (M1, M2) сдвигаются от центра наземной катушки 12 на предварительно определенное расстояние к стороне, в которую въезжает транспортное средство 1, камеры (51a-51d) могут обнаруживать наземные метки (M1, M2) заблаговременно. Дополнительно, направление камер (51a-51d) для обнаружения наземных меток (M1, M2) аппроксимируется направлением, перпендикулярным поверхности дороги, с тем чтобы повышать точность обнаружения позиций наземных меток (M1, M2). Например, каждая из форм наземных меток (M1, M2), проиллюстрированных на фиг. 4A-4G, может предварительно сопоставляться с предварительно определенным расстоянием, и контроллер 55 изображений может включать в себя схему, которая отличает формы наземных меток (M1, M2) таким образом, чтобы получать необходимое предварительно определенное расстояние от середины прямой линии 81 до центра наземной катушки 12 согласно соответствующей форме наземных меток (M1, M2).
[0045] Соответствующие камеры (51a-51d) захватывают изображения на передней стороне, левой стороне, правой стороне и задней стороне транспортного средства 1. Модуль 61 формирования изображений соединяет изображения "с высоты птичьего полета", сформированные из соответствующих снятых камерой изображений, чтобы формировать одно изображение "с высоты птичьего полета", которое является видом сверху для мониторинга кругового обзора (AVM), окружающим все стороны транспортного средства 1, как показано на фиг. 5A.
[0046] Фиг. 5A иллюстрирует случай парковки задним ходом, в котором транспортное средство 1 перемещается назад на пространство для парковки, расположенное позади транспортного средства 1 и содержащее наземную катушку 12. Поскольку абсолютное значение относительного угла между продольным направлением парковочной рамки 71 и направлением спереди назад транспортного средства 1 не составляет предварительно определенное значение или меньше в состоянии, показанном на фиг. 5A, схема 62 управления отображением отображает изображение "с высоты птичьего полета", сформированное посредством схемы 61 формирования изображений, показанной на фиг. 5A, на дисплее 53. Представленный AVM-вид сверху может предоставлять пользователю помощь при парковке таким образом, чтобы акцентировать внимание на парковке транспортного средства 1 на пространстве для парковки. Пользователь ввиду этого может поворачивать руль надлежащим образом с обращением к AVM-виду сверху.
[0047] Когда относительный угол между парковочной рамкой 71 и транспортным средством 1 уменьшается до предварительно определенного диапазона по мере того, как продолжается операция парковки транспортного средства 1, как показано на фиг. 5B, пользователь не должен обязательно продолжать поворачивание руля. Пользователь ввиду этого может концентрироваться на совмещении катушек при одновременном перемещении транспортного средства 1 в направлении спереди назад. Контроллер 55 изображений определяет то, составляет или нет абсолютное значение относительного угла продольного направления парковочной рамки 71, оцененное посредством модуля 63 оценки парковочной рамки, по отношению к направлению спереди назад транспортного средства 1, предварительно определенное значение или меньше. Когда абсолютное значение относительного угла между продольным направлением парковочной рамки 71 и направлением спереди назад транспортного средства 1 определяется как составляющее предварительно определенное значение или меньше, модуль 64 переключения отображения переключается с изображения "с высоты птичьего полета" на укрупненное изображение, показывающее относительную позицию между наземной катушкой 12 и катушкой 22 транспортного средства в более крупном масштабе, чем изображение "с высоты птичьего полета", как показано на фиг. 5C. Пользователь ввиду этого может концентрироваться на совмещении катушки 22 транспортного средства с наземной катушкой 12. Соответственно, помощь при парковке для беспроводной подачи мощности может предоставлять пользователю необходимую информацию изображений (средство простого распознавания относительной позиции между наземной катушкой и катушкой транспортного средства) в правильное время, которое требует пользователь.
[0048] Как показано на фиг. 5A и фиг. 5B, схема 62 управления отображением отображает компьютерные графические (CG) изображения следующих элементов, наложенных на изображение "с высоты птичьего полета":
[0049] (1) Рамки, указывающие контуры катушки 22 транспортного средства и наземной катушки 12;
(2) Два сегмента 85 линии, идущие в направлении ширины транспортного средства и направлении спереди назад транспортного средства 1 и пересекающиеся в центре катушки 22 транспортного средства;
(3) Наземные метки (M1, M2), подтвержденные посредством схемы 62 управления отображением; и
(4) Сегмент 81 линии, соединяющий наземные метки (M1, M2).
[0050] Например, схема 62 управления отображением отображает укрупненное изображение транспортного средства 1 в области, включающей в себя катушку 22 транспортного средства и заднюю сторону катушки 22 транспортного средства, во время парковки задним ходом, как показано на фиг. 5C. Область, окруженная посредством штрихпунктирной линии 77 на фиг. 5B, соответствует области укрупненного изображения, показанного на фиг. 5C. Схема 62 управления отображением отображает укрупненное изображение транспортного средства 1 в области, включающей в себя катушку 22 транспортного средства и переднюю сторону катушки 22 транспортного средства, во время парковки передним ходом. Соответственно, относительная позиция между катушкой 22 транспортного средства и наземной катушкой 12 может отображаться в укрупненном изображении в более крупном масштабе, чем изображение "с высоты птичьего полета", показанное на фиг. 5A и фиг. 5B.
[0051] Модуль 63 оценки парковочной рамки вычисляет сегмент 81 линии, соединяющий наземные метки (M1, M2), согласно наземным меткам (M1, M2) и оценивает продольное направление парковочной рамки 71, перпендикулярное сегменту 81 линии, согласно сегменту 81 линии.
[0052] Модуль 64 переключения отображения переключается с изображения "с высоты птичьего полета", как показано на фиг. 5B, на укрупненное изображение, как показано на фиг. 5C, когда абсолютное значение относительного угла прямой линии 81, соединяющей наземные метки (M1, M2), по отношению к прямой линии 85, проходящей через центр катушки 22 транспортного средства и параллельной направлению ширины транспортного средства транспортного средства 1, составляет предварительно определенное значение или меньше.
[0053] Ниже проиллюстрирован способ помощи при парковке с использованием устройства помощи при парковке, показанного на фиг. 1, со ссылкой на фиг. 9A. Процесс на блок-схеме последовательности операций способа, показанной на фиг. 9A начинается, когда помощь при парковке начинается, и завершается, когда транспортное средство 1 паркуется в целевой позиции для парковки, и переключатель передач переключается в позицию для парковки.
[0054] На этапе S01, устройство 300 помощи при парковке запускается. Процесс переходит к этапу S03, чтобы предоставлять пользователю информацию помощи при парковке. Информация помощи при парковке включает в себя информацию изображений. Контроллер 55 изображений формирует изображение "с высоты птичьего полета", как показано на фиг. 5A, из снятых камерой изображений, захваченных посредством камер (51a-51d), установленных в транспортном средстве 1, и отображает изображение "с высоты птичьего полета" в качестве информации изображений на дисплее 53.
[0055] Процесс переходит к этапу S05, и контроллер 55 изображений отображает CG-изображение катушки 22 транспортного средства, наложенное на изображение "с высоты птичьего полета". В частности, контроллер 55 изображений отображает CG-изображения следующих элементов, наложенных на изображение "с высоты птичьего полета":
[0056] - рамка, указывающая контур катушки 22 транспортного средства; и
- два сегмента 85 линии, идущие в направлении ширины транспортного средства и направлении спереди назад транспортного средства 1 и пересекающиеся в центре катушки 22 транспортного средства.
[0057] Процесс переходит к этапу S07, и контроллер 55 изображений распознает присутствие спаренных наземных меток (M1, M2), показанных в изображении "с высоты птичьего полета". Процесс затем переходит к этапу S09, и контроллер 55 изображений подтверждает изображение двух наземных меток (M1, M2). В частности, контроллер 55 изображений определяет форму наземных меток (M1, M2) (круглую форму, треугольную форму, прямоугольную форму и т.д.) и центральную позицию, которая представляет собой относительную позицию по отношению к транспортному средству 1.
[0058] Процесс переходит к этапу S11, и контроллер 55 изображений получает центральную позицию наземной катушки 12 согласно наземным меткам (M1, M2) и отображает CG-изображение наземной катушки 12, наложенное на изображение "с высоты птичьего полета". В частности, контроллер 55 изображений отображает CG-изображения следующих элементов, наложенных на изображение "с высоты птичьего полета":
[0059] - наземные метки (M1, M2), подтвержденные посредством схемы 62 управления отображением;
- сегмент 81 линии, соединяющий наземные метки (M1, M2);
- рамка, указывающая контур наземной катушки 12;
- сегмент линии, вертикальный к сегменту 81 линии, пересекающемуся в центре наземной катушки 12 (сегменту 81 линии); и
- заряжаемая область 78 наземной катушки 12.
[0060] Беспроводной заряд доступен, когда центр катушки 22 транспортного средства позиционируется в заряжаемой области 78 наземной катушки 12.
[0061] Процесс переходит к этапу S13, и схема 62 управления отображением вычисляет относительный угол прямой линии 81, соединяющей наземные метки (M1, M2), по отношению к прямой линии 85, проходящей через центр катушки 22 транспортного средства и параллельной направлению ширины транспортного средства транспортного средства 1.
[0062] Процесс переходит к этапу S15, и схема 62 управления отображением определяет то, составляет либо нет абсолютное значение относительного угла предварительно определенное значение (например, пять градусов) или меньше. Когда абсолютное значение относительного угла составляет предварительно определенное значение или меньше ("Да" на этапе S15), поворачивание руля почти завершается, с тем чтобы начинать совмещение катушек при одновременном перемещении транспортного средства 1 в направлении спереди назад. Процесс затем переходит к этапу S17, и информация изображений, представленная на дисплее 53, переключается с изображения "с высоты птичьего полета" (фиг. 5B) на укрупненное изображение (фиг. 5C) таким образом, чтобы отображать укрупненное изображение на дисплее 53. Это упрощает совмещение катушек, поскольку относительная позиция катушек отображается в укрупненном масштабе.
[0063] Когда абсолютное значение относительного угла не составляет предварительно определенное значение или меньше ("Нет" на этапе S15), поворачивание руля должно продолжаться, и процесс возвращается к этапу S13, чтобы продолжать отображение изображения "с высоты птичьего полета" и отслеживание изменения абсолютного значения относительного угла.
[0064] На этапе S19, пользователь перемещает транспортное средство 1 в направлении спереди назад, чтобы совмещать катушки. Пользователь останавливает транспортное средство 1, когда центр катушки 22 транспортного средства позиционируется в заряжаемом диапазоне 78 наземной катушки 12, и выключает зажигание транспортного средства 1. Процесс парковки ввиду этого завершается посредством этапов, описанных выше.
[0065] Первый вариант осуществления, описанный выше, позволяет добиваться следующих преимуществ.
[0066] Когда абсолютное значение относительного угла продольного направления парковочной рамки 71 по отношению к направлению спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше, изображение "с высоты птичьего полета" переключается на укрупненное изображение, показывающее относительную позицию наземной катушки 12 и катушки 22 транспортного средства в более крупном масштабе, чем изображение "с высоты птичьего полета". Изображение "с высоты птичьего полета" сначала отображается, чтобы акцентировать внимание на помощи при парковке для того, чтобы продвигать транспортное средство 1 на пространство для парковки. Когда относительный угол парковочной рамки 71 по отношению к транспортному средству 1 уменьшается до предварительно определенного диапазона, поворачивание руля не должно обязательно продолжаться. Изображение "с высоты птичьего полета" затем переключается на укрупненное изображение, показывающее позиции из наземной катушки 12 и катушки 22 транспортного средства в более крупном масштабе. Пользователь ввиду этого может концентрироваться на совмещении катушки 22 транспортного средства с наземной катушкой 12. Соответственно, помощь при парковке для беспроводной подачи мощности может предоставлять пользователю необходимую информацию изображений (средство простого распознавания относительной позиции между наземной катушкой 12 и катушкой 22 транспортного средства) в правильное время, которое требует пользователь.
[0067] Продольное направление парковочной рамки 71 оценивается согласно, по меньшей мере, двум наземным меткам (M1, M2), показанным в снятом камерой изображении. Использование наземных меток обеспечивает возможность точной оценки продольного направления парковочной рамки 71 независимо от того, распознается или нет непосредственно парковочная рамка 71 из снятого камерой изображения. Парковочная рамка 71 не обязательно представляет собой замкнутую рамку, полностью окружающую пространство для парковки, и может быть частично разомкнутой. Например, парковочная рамка 71 может представлять собой метки, указывающие четыре угла прямоугольного пространства для парковки, или может представлять собой метки, указывающие две противоположные стороны прямоугольного пространства для парковки, к примеру, две стороны в направлении ширины транспортного средства или две стороны в направлении спереди назад пространства для парковки. Соответственно, продольное направление парковочной рамки 71 может оцениваться независимо от того, распознается или нет непосредственно парковочная рамка 71 из снятого камерой изображения, когда наземные метки (M1, M2) показаны в снятом камерой изображении, с тем чтобы распознавать позиции наземных меток (M1, M2).
[0068] Изображение "с высоты птичьего полета" (фиг. 5B) переключается на укрупненное изображение (фиг. 5C), когда абсолютное значение относительного угла прямой линии 81, соединяющей наземные метки (M1, M2), по отношению к прямой линии 85, проходящей через центр катушки 22 транспортного средства и параллельной направлению ширины транспортного средства транспортного средства 1, составляет предварительно определенное значение (например, пять градусов) или меньше. Прямая линия 81, соединяющая наземные метки (M1, M2), является перпендикулярной продольному направлению парковочной рамки 71. Регулирование позиционирования транспортного средства 1 в пространство для парковки почти завершается, когда абсолютное значение относительного угла составляет предварительно определенное значение или меньше, и пользователь должен только перемещать транспортное средство 1 в направлении спереди назад. Изображение переключается на укрупненное изображение в этот момент таким образом, чтобы совмещать катушки. Соответственно, информация изображений, которой требует пользователь, может предоставляться в правильное время, которое требует пользователь.
[0069] Второй вариант осуществления
Второй вариант осуществления иллюстрирует пример относительно операции переключения с изображения "с высоты птичьего полета" на укрупненное изображение при таком дополнительном условии, добавленном в пример первого варианта осуществления, что наземные метки (M1, M2) показаны в правой и левой областях изображения "с высоты птичьего полета". Аппаратная конфигурация системы беспроводной подачи мощности по второму варианту осуществления является идентичной аппаратной конфигурации по первому варианту осуществления, показанной на фиг. 1, и перекрывающиеся иллюстрации и пояснения не повторяются в этом варианте осуществления.
[0070] Как показано на фиг. 6, изображение "с высоты птичьего полета" (AVM-вид сверху), отображаемое на дисплее 53, разделяется на четыре области (область 86a передней стороны, левостороннюю область 86b, правостороннюю область 86c и область 86d задней стороны), соответствующие надлежащим камерам (51a-51d). Область 86a передней стороны соответствует камере 51a, предоставленной в переднем конце транспортного средства 1. Левосторонняя область 86b соответствует камере 51b, предоставленной в левом боковом зеркале заднего вида транспортного средства 1. Правосторонняя область 86c соответствует камере 51c, предоставленной в правом боковом зеркале заднего вида транспортного средства 1. Область 86d задней стороны соответствует камере 51d, предоставленной в заднем конце транспортного средства 1.
[0071] Модуль 64 переключения отображения переключается с изображения "с высоты птичьего полета" (фиг. 5B) на укрупненное изображение (фиг. 5C), показывающее относительную позицию между наземной катушкой 12 и катушкой 22 транспортного средства в более крупном масштабе, чем изображение "с высоты птичьего полета", когда абсолютное значение относительного угла между продольным направлением парковочной рамки 71 и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше, и наземные метки (M1, M2) показаны как в правосторонней области 86c, так и в левосторонней области 86b изображения "с высоты птичьего полета".
[0072] Например, когда транспортное средство 1 и парковочная рамка 71 отделены на расстояние без перекрывания друг друга, и абсолютное значение относительного угла между продольным направлением парковочной рамки 71 и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше, пользователь должен приближать транспортное средство 1 к пространству для парковки при подтверждении безопасности вокруг транспортного средства 1, до совмещения катушек. Информация изображений для упрощения совмещения катушек предпочтительно представляется после того, как транспортное средство 1 в достаточной степени приближается вплотную к парковочной рамке 71.
[0073] Схема 62 управления отображением определяет то, что транспортное средство 1 в достаточной степени приближается вплотную к парковочной рамке 71, когда наземные метки (M1, M2) показаны как в правосторонней области 86c, так и в левосторонней области 86b изображения "с высоты птичьего полета". Модуль 64 переключения отображения переключается с изображения "с высоты птичьего полета" (фиг. 5B) на укрупненное изображение (фиг. 5C), когда удовлетворяются такие условия, что абсолютное значение относительного угла между продольным направлением парковочной рамки 71 и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше, и что наземные метки (M1, M2) показаны как в правосторонней области 86c, так и в левосторонней области 86b изображения "с высоты птичьего полета".
[0074] Ниже проиллюстрирован способ помощи при парковке согласно второму варианту осуществления со ссылкой на фиг. 9B. Процесс на блок-схеме последовательности операций способа, показанной на фиг. 9B, дополнительно включает в себя этап S21 между этапом S15 и этапом S17, показанными на фиг. 9A. Другие этапы, показанные на фиг. 9B, являются идентичными этапам на фиг. 9A, и перекрывающиеся пояснения не повторяются ниже.
[0075] Когда абсолютное значение относительного угла между продольным направлением парковочной рамки 71 и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше ("Да" на этапе S15), процесс переходит к этапу S21. Когда абсолютное значение относительного угла не составляет предварительно определенное значение или меньше ("Нет" на этапе S15), процесс возвращается к этапу S13.
[0076] На этапе S21, схема 62 управления отображением определяет то, показаны либо нет наземная метка M1 и наземная метка M2, соответственно, в левосторонней области 86b и правосторонней области 86c изображения "с высоты птичьего полета", как показано на фиг. 6.
[0077] Когда определение представляет собой положительный результат на этапе S21, поворачивание руля почти завершается, с тем чтобы начинать совмещение катушек при одновременном перемещении транспортного средства 1 в направлении спереди назад. Процесс затем переходит к этапу S17, и изображение "с высоты птичьего полета" (фиг. 5B) переключается на укрупненное изображение (фиг. 5C) таким образом, чтобы отображать укрупненное изображение на дисплее 53. Это упрощает совмещение катушек, поскольку относительная позиция катушек отображается в укрупненном масштабе. Когда определение представляет собой отрицательный результат на этапе S21, процесс возвращается к этапу S13.
[0078] Как описано выше, изображение "с высоты птичьего полета" переключается на укрупненное изображение, когда абсолютное значение относительного угла между продольным направлением парковочной рамки 71 и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше, и наземные метки (M1, M2) показаны как в правосторонней области 86c, так и в левосторонней области 86b изображения "с высоты птичьего полета". Поскольку изображения переключаются в состоянии, в котором транспортное средство 1 приближается к целевой позиции для парковки, необходимая информация изображений может представляться в точке, способствующей более простому совмещению катушек.
[0079] Третий вариант осуществления
Третий вариант осуществления иллюстрирует пример, аналогичный примеру второго варианта осуществления, относительно операции переключения с изображения "с высоты птичьего полета" на укрупненное изображение в состоянии, в котором транспортное средство 1 в достаточной степени приближается вплотную к парковочной рамке 71. В частности, третий вариант осуществления представляет собой пример относительно операции переключения с изображения "с высоты птичьего полета" на укрупненное изображение при таком дополнительном условии, добавленном в пример первого варианта осуществления, что вспомогательная катушка, смонтированная на транспортном средстве 1, обнаруживает электрическую мощность из наземной катушки 12. Аппаратная конфигурация системы беспроводной подачи мощности по третьему варианту осуществления является идентичной аппаратной конфигурации по первому варианту осуществления, показанной на фиг. 1, за исключением вспомогательных катушек, дополнительно установленных в транспортном средстве 1, и перекрывающиеся иллюстрации и пояснения не повторяются в этом варианте осуществления.
[0080] Ниже описывается пример компоновки вспомогательных катушек (87a, 87b), смонтированных на транспортном средстве 1, со ссылкой на фиг. 7. Каждая из вспомогательных катушек (87a, 87b) изготовлена из токоведущего провода и имеет меньший размер и меньшее число обмоток, чем катушка 22 транспортного средства и наземная катушка 12. Вспомогательная катушка 87a предоставляется в переднем конце базы транспортного средства 1, и вспомогательная катушка 87b предоставляется в заднем конце базы транспортного средства 1. Как показано на фиг. 7, когда транспортное средство 1 выполняет парковку передним ходом посредством перемещения вперед таким образом, что оно приближается к наземной катушке 12, вспомогательная катушка 87a обнаруживает электрическую мощность из наземной катушки 12 в катушку 22 транспортного средства. Транспортное средство 1 ввиду этого может определяться как приближающееся к пространству для парковки вследствие обнаружения посредством вспомогательной катушки 87a. Когда транспортное средство 1 выполняет парковку задним ходом посредством перемещения назад таким образом, что оно приближается к наземной катушке 12, вспомогательная катушка 87b обнаруживает электрическую мощность из наземной катушки 12.
[0081] Модуль 64 переключения отображения переключается с изображения "с высоты птичьего полета" на укрупненное изображение, когда абсолютное значение относительного угла между продольным направлением парковочной рамки 71 и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше, и любая из вспомогательных катушек (87a, 87b), смонтированных на транспортном средстве 1, обнаруживает электрическую мощность из наземной катушки 12.
[0082] Ниже проиллюстрирован способ помощи при парковке согласно третьему варианту осуществления со ссылкой на фиг. 9C. Процесс на блок-схеме последовательности операций способа, показанной на фиг. 9C, дополнительно включает в себя этап S23 между этапом S15 и этапом S17, показанными на фиг. 9A. Другие этапы, показанные на фиг. 9C, являются идентичными этапам на фиг. 9A, и перекрывающиеся пояснения не повторяются ниже.
[0083] Когда абсолютное значение относительного угла между продольным направлением парковочной рамки 71 и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше ("Да" на этапе S15), процесс переходит к этапу S23. Когда абсолютное значение относительного угла не составляет предварительно определенное значение или меньше ("Нет" на этапе S15), процесс возвращается к этапу S13.
[0084] На этапе S23, схема 62 управления отображением определяет то, обнаруживает либо нет какая-либо из вспомогательных катушек (87a, 87b), смонтированных на транспортном средстве 1, показанном на фиг. 7, электрическую мощность из наземной катушки 12.
[0085] Когда определение представляет собой положительный результат на этапе S23, поворачивание руля почти завершается, с тем чтобы начинать совмещение катушек при одновременном перемещении транспортного средства 1 в направлении спереди назад. Процесс затем переходит к этапу S17, и модуль 64 переключения отображения переключается с изображения "с высоты птичьего полета" на укрупненное изображение таким образом, чтобы отображать укрупненное изображение на дисплее 53. Это упрощает совмещение катушек, поскольку относительная позиция катушек отображается в укрупненном масштабе. Когда определение представляет собой отрицательный результат на этапе S23, процесс возвращается к этапу S13.
[0086] Согласно третьему варианту осуществления, как описано выше, информация изображений для упрощения распознавания относительной позиции между наземной катушкой 12 и катушкой 22 транспортного средства может представляться в момент, когда транспортное средство 1 в достаточной степени приближается вплотную к пространству для парковки, и относительный угол между транспортным средством 1 и парковочной рамкой 71 уменьшается в достаточной степени.
[0087] Четвертый вариант осуществления
Четвертый вариант осуществления иллюстрирует пример относительно операции определения того, что абсолютное значение относительного угла между продольным направлением парковочной рамки 71 и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше, когда руль, предоставленный в транспортном средстве 1, находится в позиции нейтрали. Четвертый вариант осуществления использует наземные метки (M1, M2) и прямую линию 81, соединяющую наземные метки (M1, M2), для обнаружения позиции наземной катушки 12, а не для оценки продольного направления парковочной рамки 71. Аппаратная конфигурация системы беспроводной подачи мощности по четвертому варианту осуществления является идентичной аппаратной конфигурации по первому варианту осуществления, показанной на фиг. 1, и перекрывающиеся иллюстрации и пояснения не повторяются в этом варианте осуществления.
[0088] Модуль 64 переключения отображения переключается с изображения "с высоты птичьего полета" на укрупненное изображение, когда руль, предоставленный в транспортном средстве 1, находится в позиции нейтрали. При использовании в данном документе, фраза "руль в позиции нейтрали" означает состояние, в котором абсолютное значение угла поворота руля при рулении составляет предварительно определенное опорное значение руления (например, три градуса) или меньше. Фраза также означает состояние, в котором абсолютное значение угла поворота колес составляет предварительно определенное опорное значение поворота или меньше.
[0089] Ниже проиллюстрирован способ помощи при парковке согласно четвертому варианту осуществления со ссылкой на фиг. 9D. Процесс на блок-схеме последовательности операций способа, показанной на фиг. 9D, включает в себя этап S25 вместо этапа S13 и этапа S15, показанных на фиг. 9A. Другие этапы, показанные на фиг. 9D, являются идентичными этапам на фиг. 9A, и перекрывающиеся пояснения не повторяются ниже.
[0090] На этапе S25, схема 62 управления отображением отслеживает руль транспортного средства 1 до тех пор, пока руль не располагается в позиции нейтрали. Когда определение представляет собой положительный результат на этапе S25, поворачивание руля почти завершается, с тем чтобы начинать совмещение катушек при одновременном перемещении транспортного средства 1 в направлении спереди назад. Процесс затем переходит к этапу S17, и модуль 64 переключения отображения переключается с изображения "с высоты птичьего полета" на укрупненное изображение таким образом, чтобы отображать укрупненное изображение на дисплее 53. Это упрощает совмещение катушек, поскольку относительная позиция катушек отображается в укрупненном масштабе.
[0091] Согласно четвертому варианту осуществления, как описано выше, укрупненное изображение для упрощения совмещения катушек может представляться в момент, когда регулирование позиционирования транспортного средства 1 в пространство для парковки почти завершается, и пользователь должен только перемещать транспортное средство 1 в направлении спереди назад.
[0092] Пятый вариант осуществления
Пятый вариант осуществления примерно иллюстрирует пример относительно операции определения того, что абсолютное значение относительного угла между продольным направлением парковочной рамки 71 и направлением спереди назад транспортного средства 1 составляет предварительно определенное значение или меньше, когда линии оцененного курса, отображаемые на дисплее 53, обозначают прямое перемещение. Пятый вариант осуществления использует наземные метки (M1, M2) и прямую линию 81, соединяющую наземные метки (M1, M2) для обнаружения позиции наземной катушки 12, а не для оценки продольного направления парковочной рамки 71. Аппаратная конфигурация системы беспроводной подачи мощности по пятому варианту осуществления является идентичной аппаратной конфигурации по первому варианту осуществления, показанной на фиг. 1, и перекрывающиеся иллюстрации и пояснения не повторяются в этом варианте осуществления.
[0093] Контроллер 55 изображений оценивает курс транспортного средства 1 согласно углу поворота руля при рулении или углу поворота колес транспортного средства 1 и отображает линии (90, 91a) (линии оцененного курса), указывающие оцененный курс транспортного средства 1, наложенные на изображение 92 "с высоты птичьего полета" или снятое камерой изображение 93', захваченное посредством камеры 51d, как показано на фиг. 8A или фиг. 8B. Линии (90, 91a) оцененного курса идут из задних концов или передних концов обеих боковых поверхностей транспортного средства 1. По мере того, как абсолютное значение угла поворота или угла поворота при рулении меньше, кривизна соответствующих линий оцененного курса уменьшается, так что она аппроксимируется прямой линией. Как показано на фиг. 8B, когда линии 91b оцененного курса указывают прямое перемещение, угол поворота при рулении или угол поворота может определяться как составляющий приблизительно нуль градусов.
[0094] Ниже проиллюстрирован способ помощи при парковке согласно пятому варианту осуществления со ссылкой на фиг. 9E. Процесс на блок-схеме последовательности операций способа, показанной на фиг. 9E, включает в себя этап S27 вместо этапа S13 и этапа S15, показанных на фиг. 9A. Другие этапы, показанные на фиг. 9E, являются идентичными этапам на фиг. 9A, и перекрывающиеся пояснения не повторяются ниже.
[0095] На этапе S27, схема 62 управления отображением отслеживает линии оцененного курса до тех пор, пока линии оцененного курса, отображаемые на дисплее 53, не указывают прямое перемещение. Когда определение представляет собой положительный результат на этапе S27, руль может определяться как находящийся в позиции нейтрали. Поворачивание руля ввиду этого почти завершается, с тем чтобы начинать совмещение катушек при одновременном перемещении транспортного средства 1 в направлении спереди назад. Процесс затем переходит к этапу S17, и модуль 64 переключения отображения переключается с изображения "с высоты птичьего полета" на укрупненное изображение таким образом, чтобы отображать укрупненное изображение на дисплее 53. Это упрощает совмещение катушек, поскольку относительная позиция катушек отображается в укрупненном масштабе.
[0096] Согласно пятому варианту осуществления, как описано выше, укрупненное изображение для упрощения совмещения катушек может представляться в момент, когда регулирование позиционирования транспортного средства 1 в пространство для парковки почти завершается, и пользователь должен только перемещать транспортное средство 1 в направлении спереди назад.
[0097] Функции, описанные в соответствующих вариантах осуществления, могут реализовываться в одной или более схем обработки. Схема обработки включает в себя программируемое обрабатывающее устройство, к примеру, обрабатывающее устройство, включающее в себя электрическую схему. Такое обрабатывающее устройство включает в себя специализированную интегральную схему (ASIC), выполненную с возможностью осуществлять функции, описанные в соответствующих вариантах осуществления, или традиционные схемные компоненты.
[0098] Хотя настоящее изобретение описывается выше со ссылкой на варианты осуществления, следует понимать, что настоящее изобретение не имеет намерение быть ограниченным вариантами осуществления, описанными выше, и различные модификации и улучшения должны быть очевидными для специалистов в данной области техники в пределах объема настоящего изобретения.
[0099] Укрупненное изображение не ограничено примером, показанным на фиг. 5C, и может представлять собой любое из изображений, как проиллюстрировано на фиг. 10A-10D. Укрупненные изображения, показанные на фиг. 10A-10D, отличаются от укрупненного изображения, показанного на фиг. 5C, соотношением сторон, при котором длина в направлении ширины транспортного средства превышает длину в направлении спереди назад транспортного средства 1. Укрупненные изображения, показанные на фиг. 10A-10D, ввиду этого предпочтительно используются в качестве переключенных изображений в момент, когда расстояние между катушками уменьшается больше расстояния, показанного на фиг. 5C.
[0100] Фиг. 10A и фиг. 10B иллюстрируют парковку передним ходом, и фиг. 10C и фиг. 10D иллюстрируют парковку задним ходом. Фиг. 10A и фиг. 10C показывают CG-изображения следующих элементов, наложенных на изображение "с высоты птичьего полета":
[0101] Рамка, указывающая контур катушки 22 транспортного средства; два сегмента линии (85, 93), идущие в направлении ширины транспортного средства и направлении спереди назад транспортного средства 1 и пересекающиеся в центре катушки 22 транспортного средства; наземные метки (M1, M2); сегмент 81 линии, соединяющий наземные метки (M1, M2); рамка, указывающая контур наземной катушки 12; сегмент 83 линии, вертикальный к сегменту 81 линии, пересекающемуся в центре наземной катушки 12 (сегмент 81 линии); и заряжаемая область 78 наземной катушки 12.
[0102] Фиг. 10B и фиг. 10D иллюстрируют изображения, в которых изображения "с высоты птичьего полета" исключаются из фиг. 10A и фиг. 10C, и части катушки дополнительно укрупняются. CG-изображения рамки, указывающей контур катушки 22 транспортного средства, и рамки, указывающей контур наземной катушки 12, исключаются из фиг. 10A и фиг. 10C. Необязательные изображения для совмещения катушек исключаются, с тем чтобы дополнительно упрощать совмещение катушек.
Список ссылочных обозначений
[0103] 1 - транспортное средство
2 - пространство для парковки
12 - наземная катушка
22 - катушка транспортного средства
53 - дисплей
55 - контроллер изображений
61 - схема формирования изображений
62 - схема управления отображением
71 - парковочная рамка
86b - левосторонняя область
86c - правосторонняя область
87a, 87b - вспомогательная катушка
90, 91a, 91b - линия оцененного курса
92 - изображение "с высоты птичьего полета"
93’ - снятое камерой изображение
M1, M2 - наземная метка.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство беспроводной подачи энергии и устройство помощи при парковке
Система помощи при парковке и устройство помощи при парковке

