Результат интеллектуальной деятельности: СИСТЕМА ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе помощи при парковке и к устройству помощи при парковке, которые помогают в совмещении катушки приема энергии на стороне транспортного средства с катушкой передачи энергии на наземной стороне.
Уровень техники
[0002] В качестве помощи при парковке существует традиционно известное изобретение задания целевых линий парковки на мониторе дисплея, чтобы направлять транспортное средство в целевую позицию парковки (патентная литература 1).
Список ссылок
Патентная литература
[0003] Патентная литература 1: Японский патент № 4235026
Сущность изобретения
Техническая проблема
[0004] Однако, в патентной литературе 1, земля, которая фактически не движется, движется на мониторе дисплея, в то время как транспортное средство, которое фактически движется, является неподвижным на мониторе дисплея, и водитель может иметь ощущение странности.
[0005] Настоящее изобретение было реализовано, принимая во внимание проблему, описанную выше, и его целью является предоставление системы помощи при парковке и устройства помощи при парковке, которые предоставляют возможность водителю интуитивно совмещать катушку приема энергии на стороне транспортного средства с катушкой передачи энергии на наземной стороне.
[0006] Система помощи при парковке в одном аспекте настоящего изобретения включает в себя: устройство передачи энергии, имеющее катушку передачи энергии, предусмотренную на наземной стороне; и устройство приема энергии, имеющее катушку приема энергии, предусмотренную в транспортном средстве. Устройство приема энергии принимает изображение, захваченное средством формирования изображений, установленным в устройстве передачи энергии, и отображает принятое изображение в средстве отображения.
Краткое описание чертежей
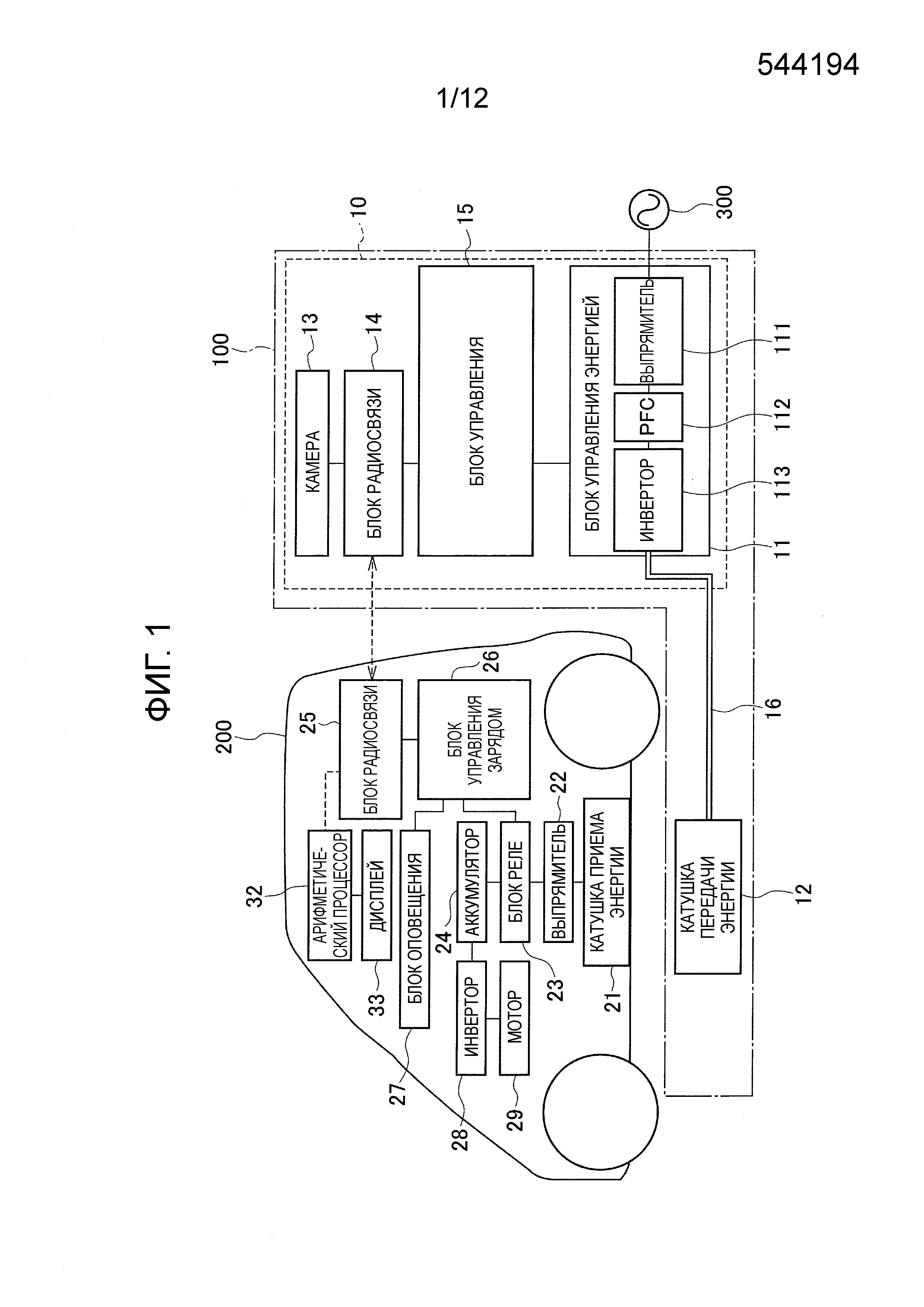
[0007] Фиг. 1 - это схема общей конфигурации системы помощи при парковке в первом варианте осуществления настоящего изобретения.
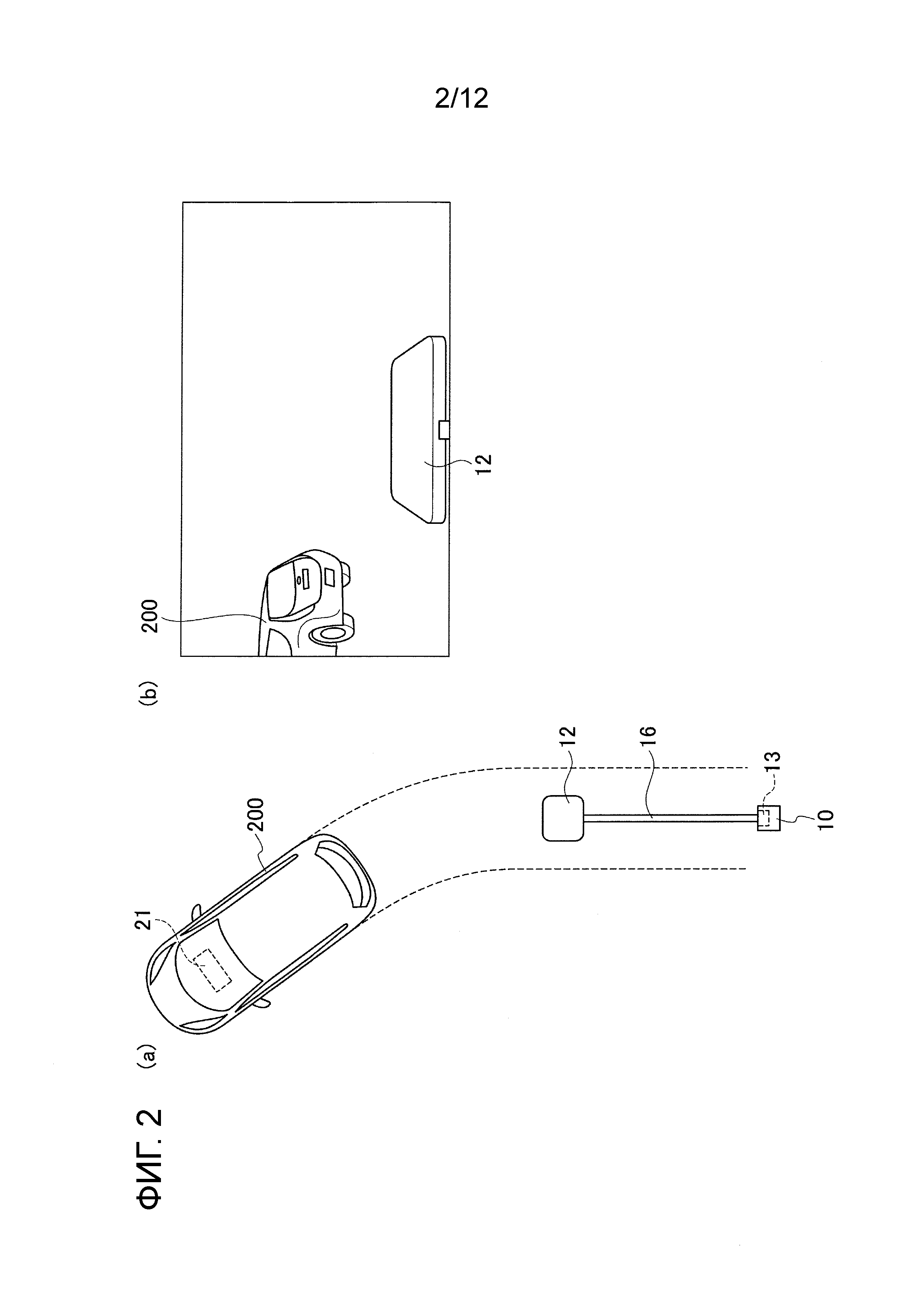
Часть (a) на фиг. 2 - это вид сверху, иллюстрирующий позиционное соотношение между транспортным средством, включающим в себя катушку приема энергии, и площадкой для парковки, включающей в себя катушку передачи энергии, а часть (b) на фиг. 2 - это видеоизображение с камеры, захватывающее позиционное соотношение, иллюстрированное в части (a) на фиг. 2.
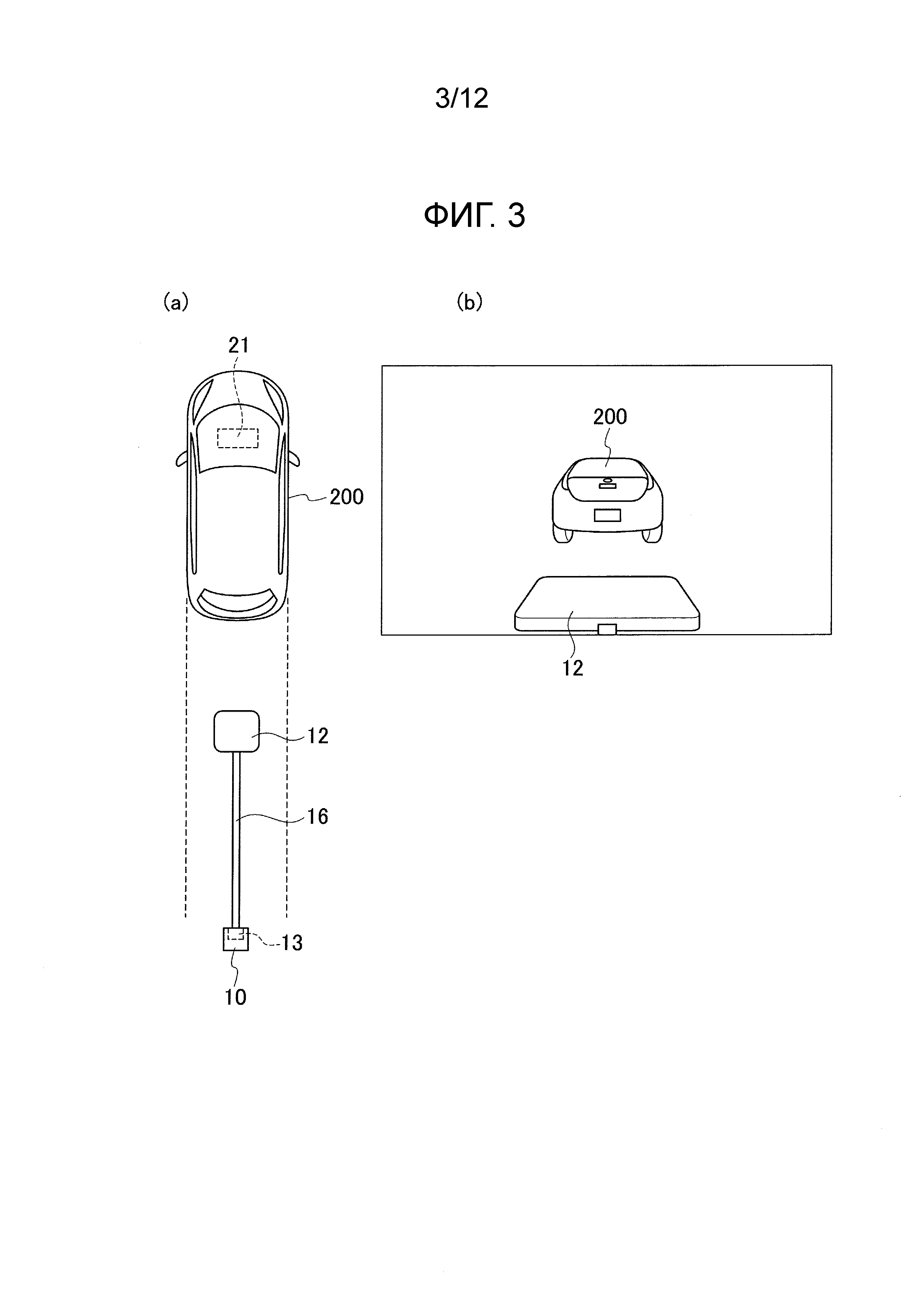
Часть (a) на фиг. 3 - это вид сверху, иллюстрирующий позиционное соотношение между транспортным средством, включающим в себя катушку приема энергии, и площадкой для парковки, включающим в себя катушку передачи энергии, а часть (b) на фиг. 3 - это видеоизображение с камеры, захватывающее позиционное соотношение, иллюстрированное в части (a) на фиг. 3.
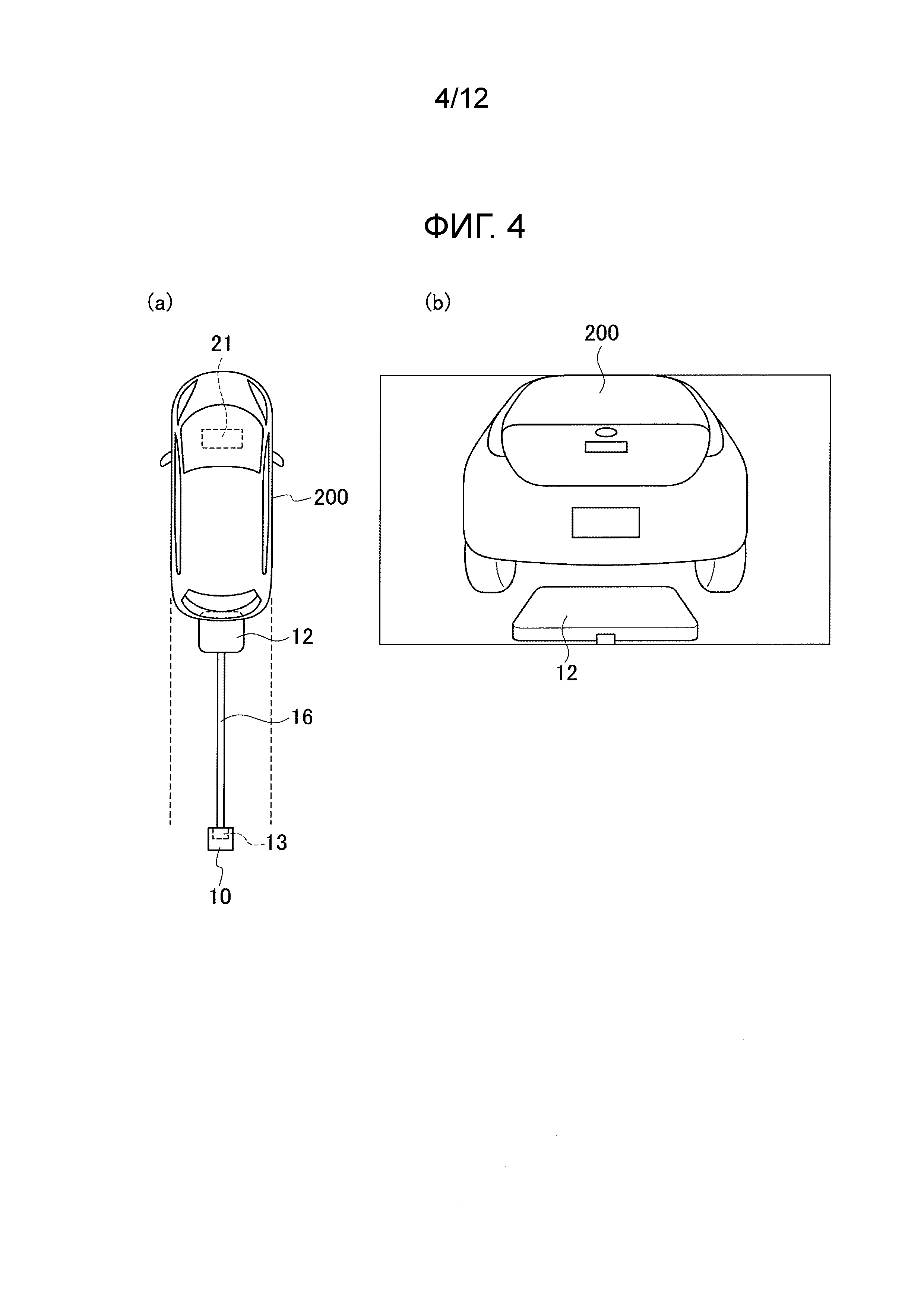
Часть (a) на фиг. 4 - это вид сверху, иллюстрирующий позиционное соотношение между транспортным средством, включающим в себя катушку приема энергии, и площадкой для парковки, включающей в себя катушку передачи энергии, а часть (b) на фиг. 4 - это видеоизображение с камеры, захватывающее позиционное соотношение, иллюстрированное в части (a) на фиг. 4.
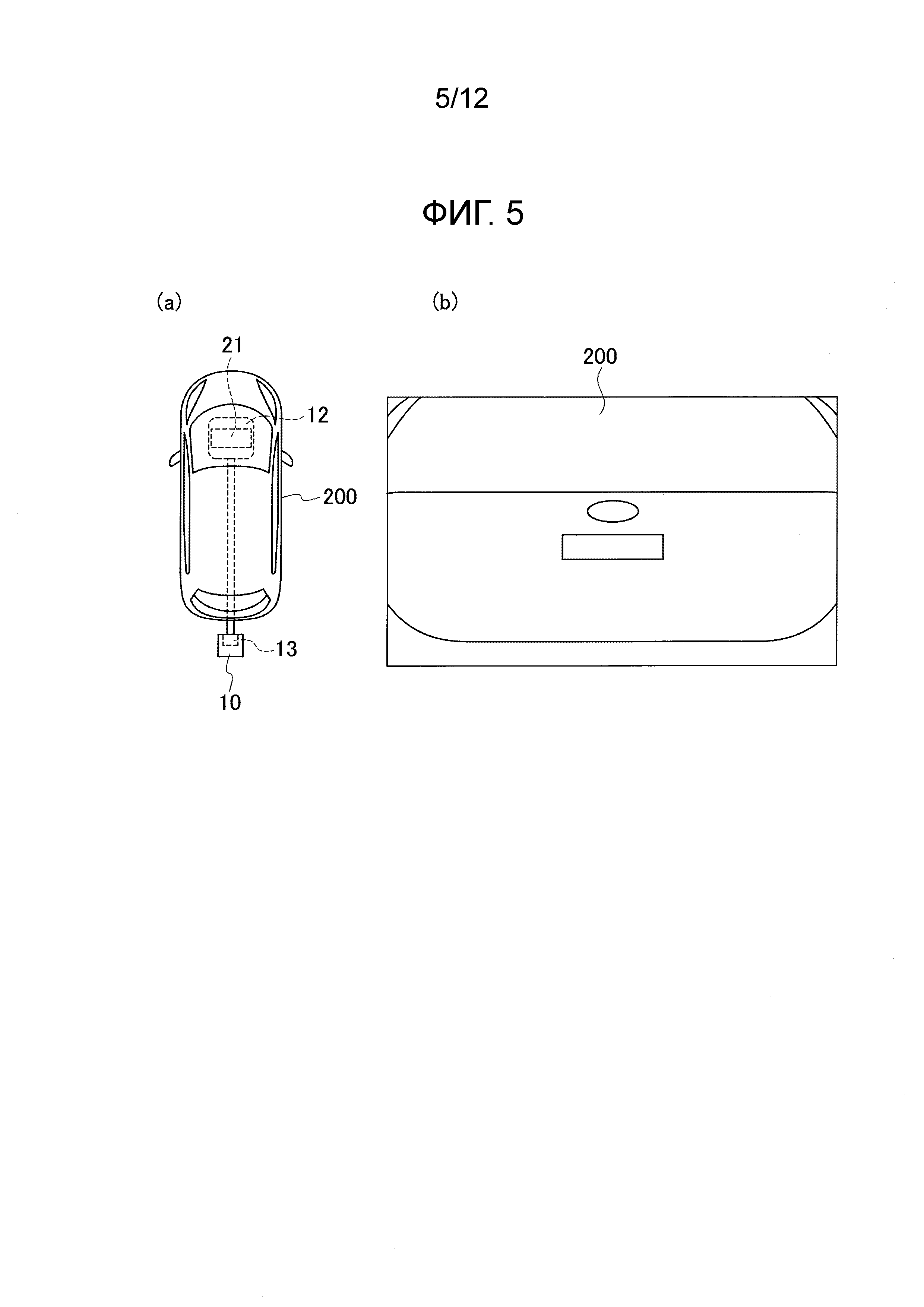
Часть (a) на фиг. 5 - это вид сверху, иллюстрирующий позиционное соотношение между транспортным средством, включающим в себя катушку приема энергии, и площадкой для парковки, включающей в себя катушку передачи энергии, а часть (b) на фиг. 5 - это видеоизображение с камеры, захватывающее позиционное соотношение, иллюстрированное в части (a) на фиг. 5.
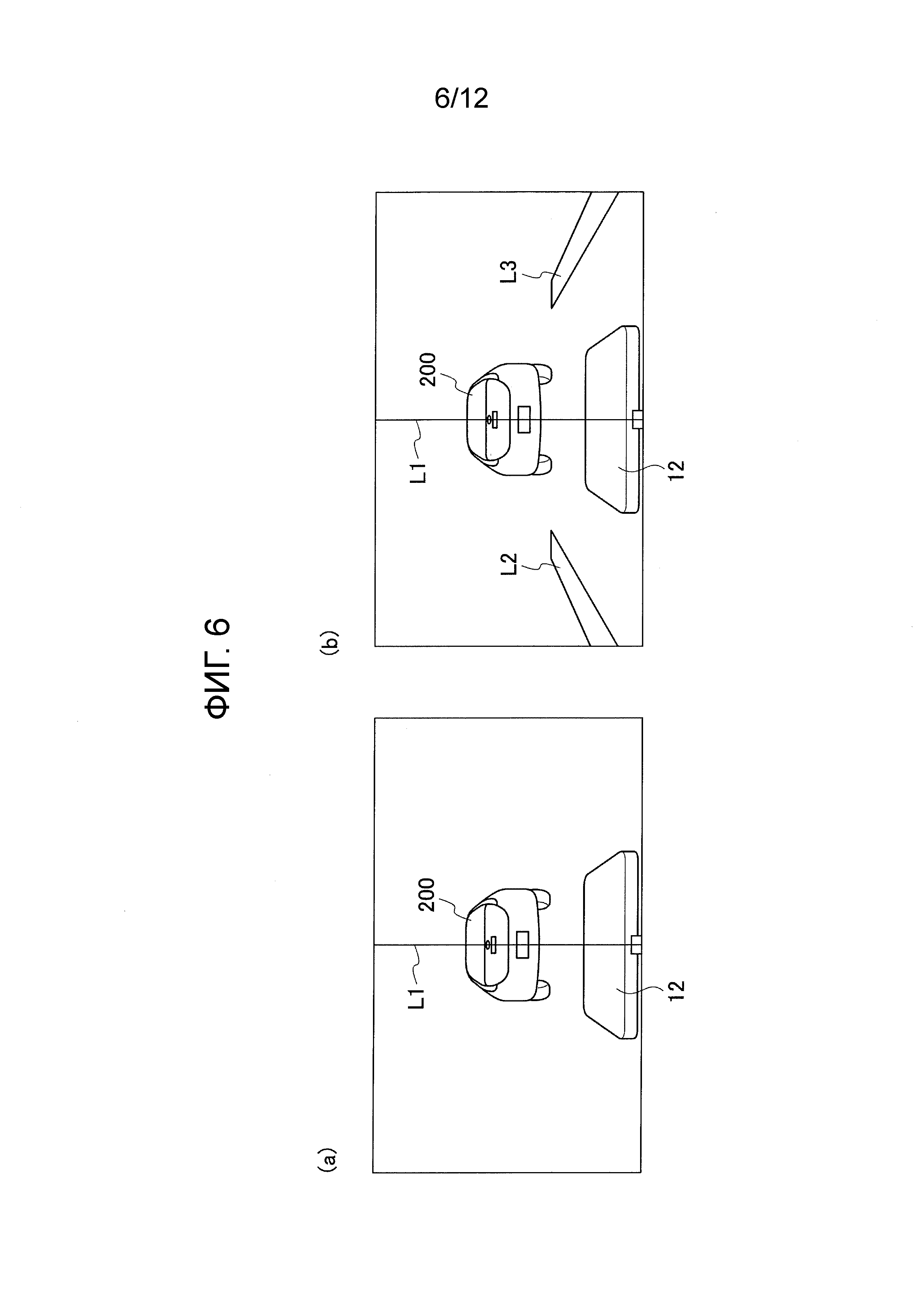
Часть (a) на фиг. 6 - это вид, в котором центральная линия накладывается на видеоизображение с камеры, захватываемое наземным контроллером, а часть (b) на фиг. 6 - это вид, в котором центральная линия и линии парковки накладываются на видеоизображение с камеры, захватываемое наземным контроллером.
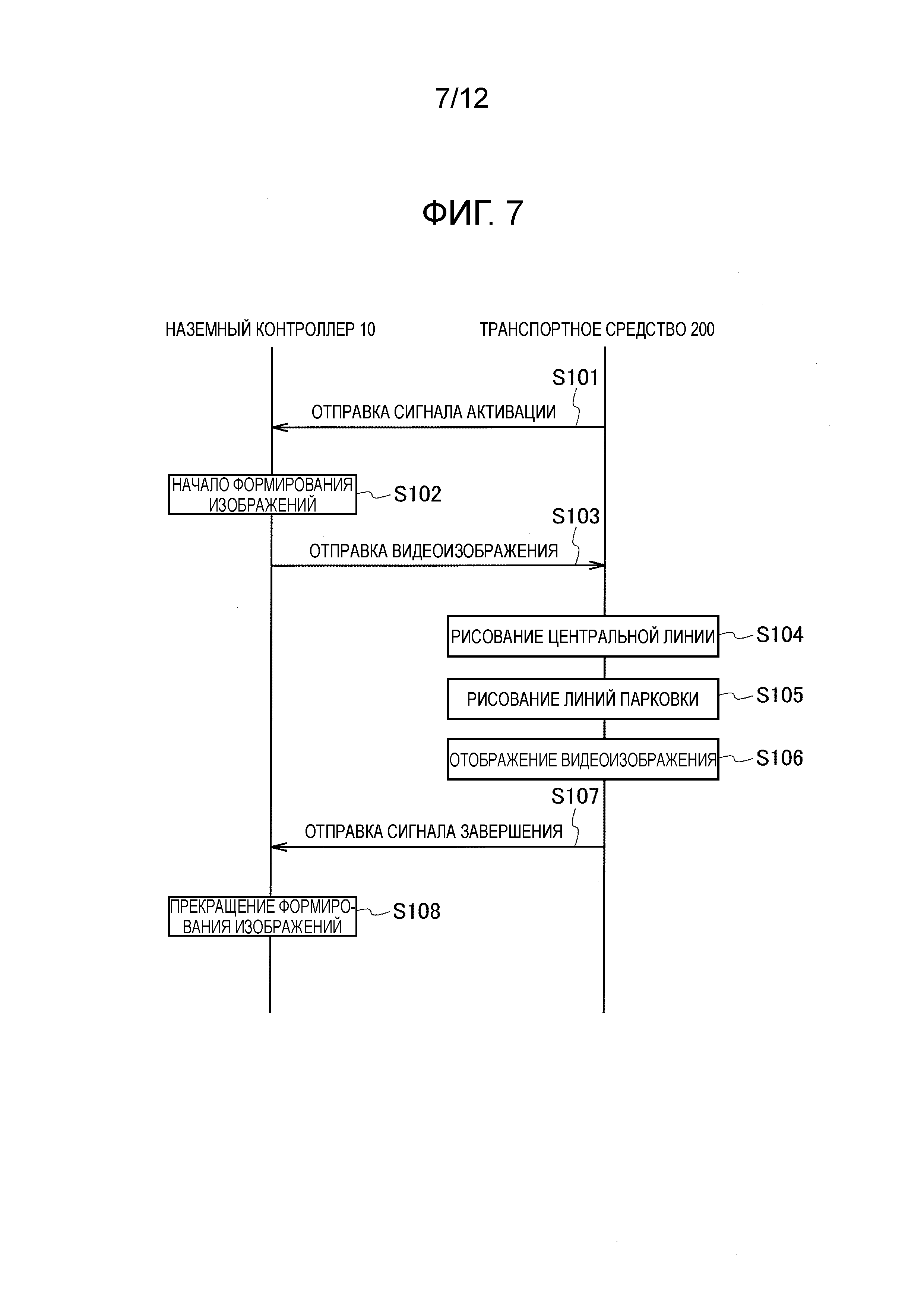
Фиг. 7 - это диаграмма последовательности, изображающая примеры эксплуатации транспортного средства и наземного контроллера в первом варианте осуществления настоящего изобретения.
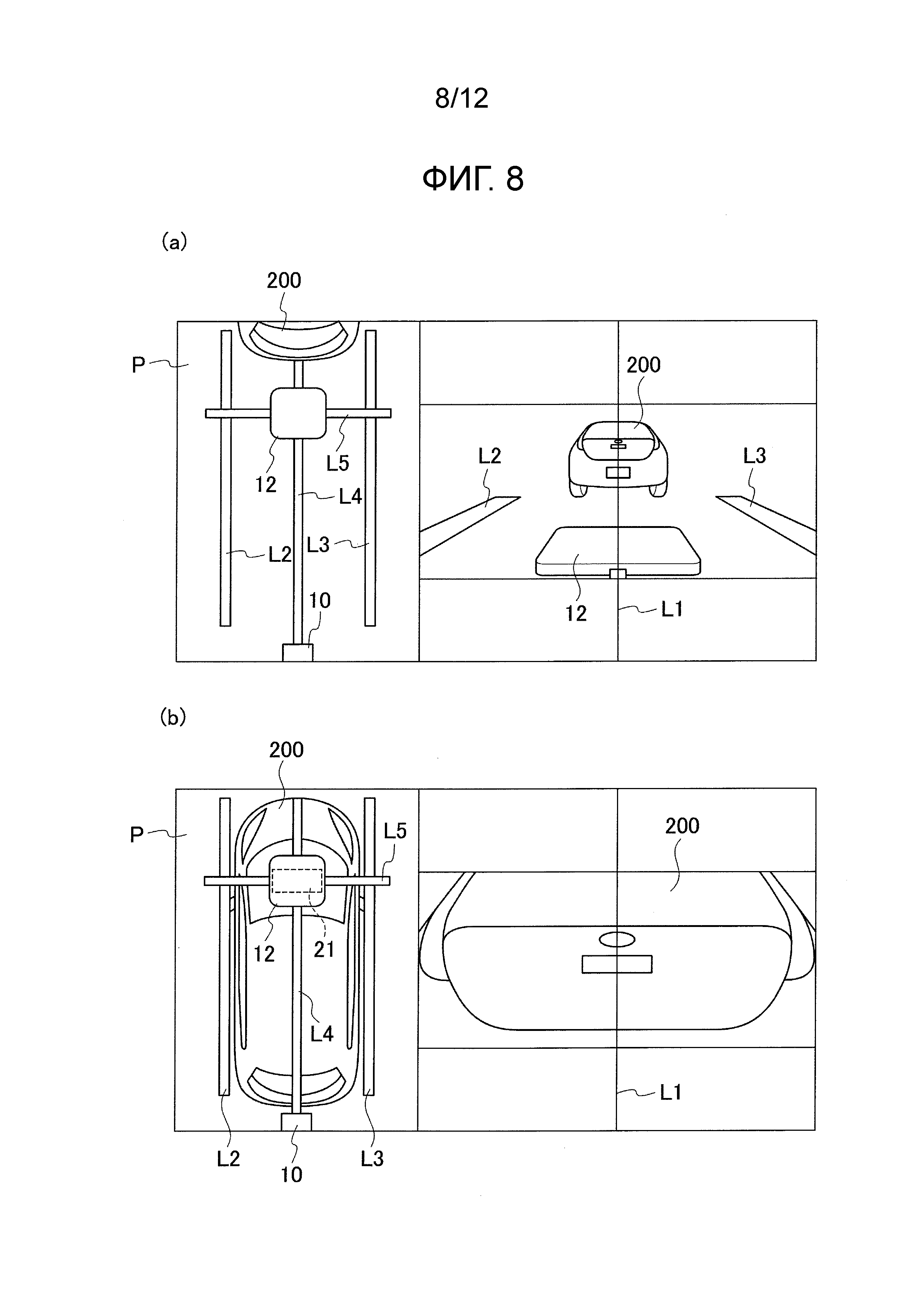
Части (a) и (b) на фиг. 8 - это примеры изображения дисплея во втором варианте осуществления настоящего изобретения.
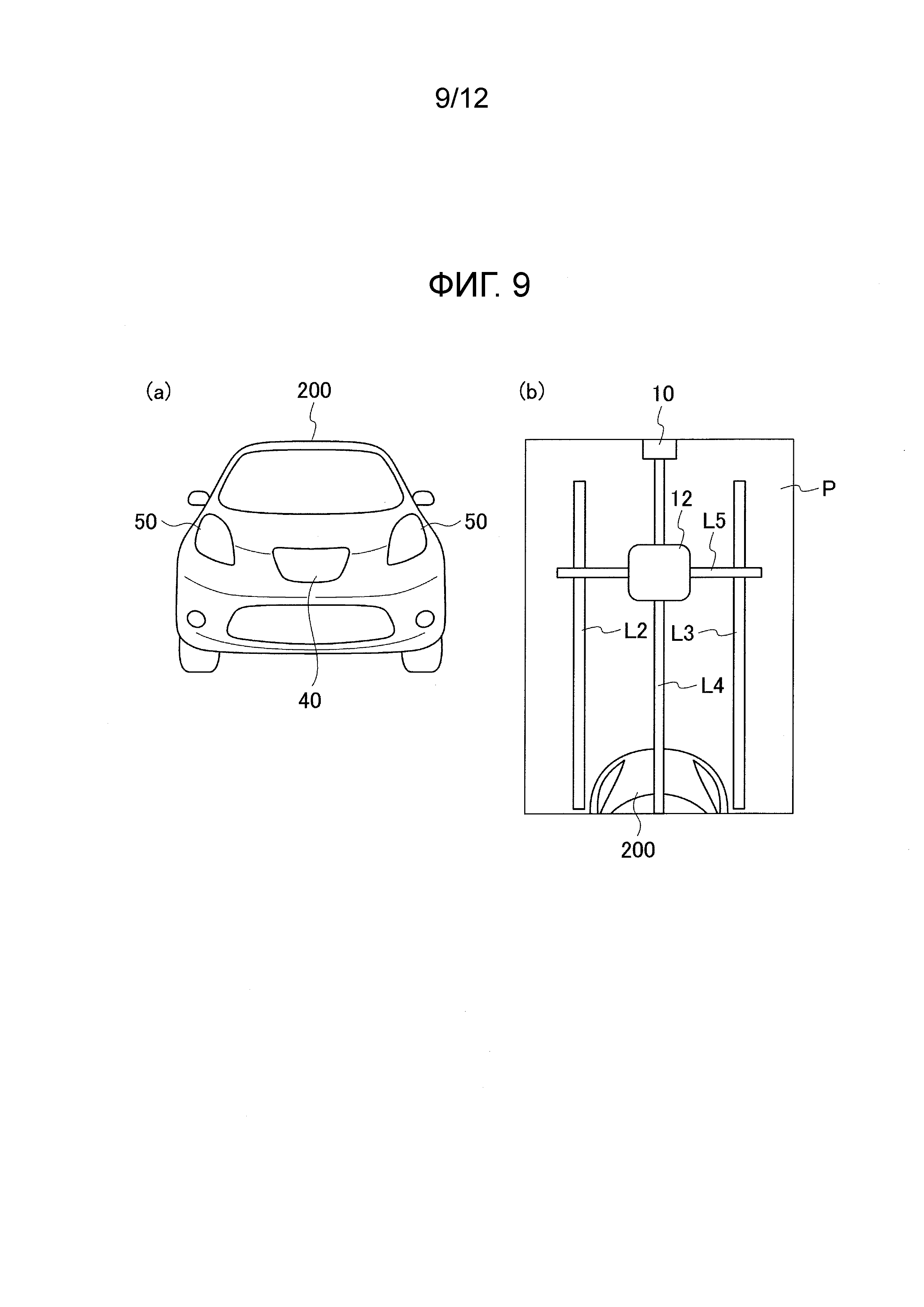
Часть (a) на фиг. 9 - это вид спереди транспортного средства, а часть (b) на фиг. 9 - это пример изображения дисплея во втором варианте осуществления настоящего изобретения.
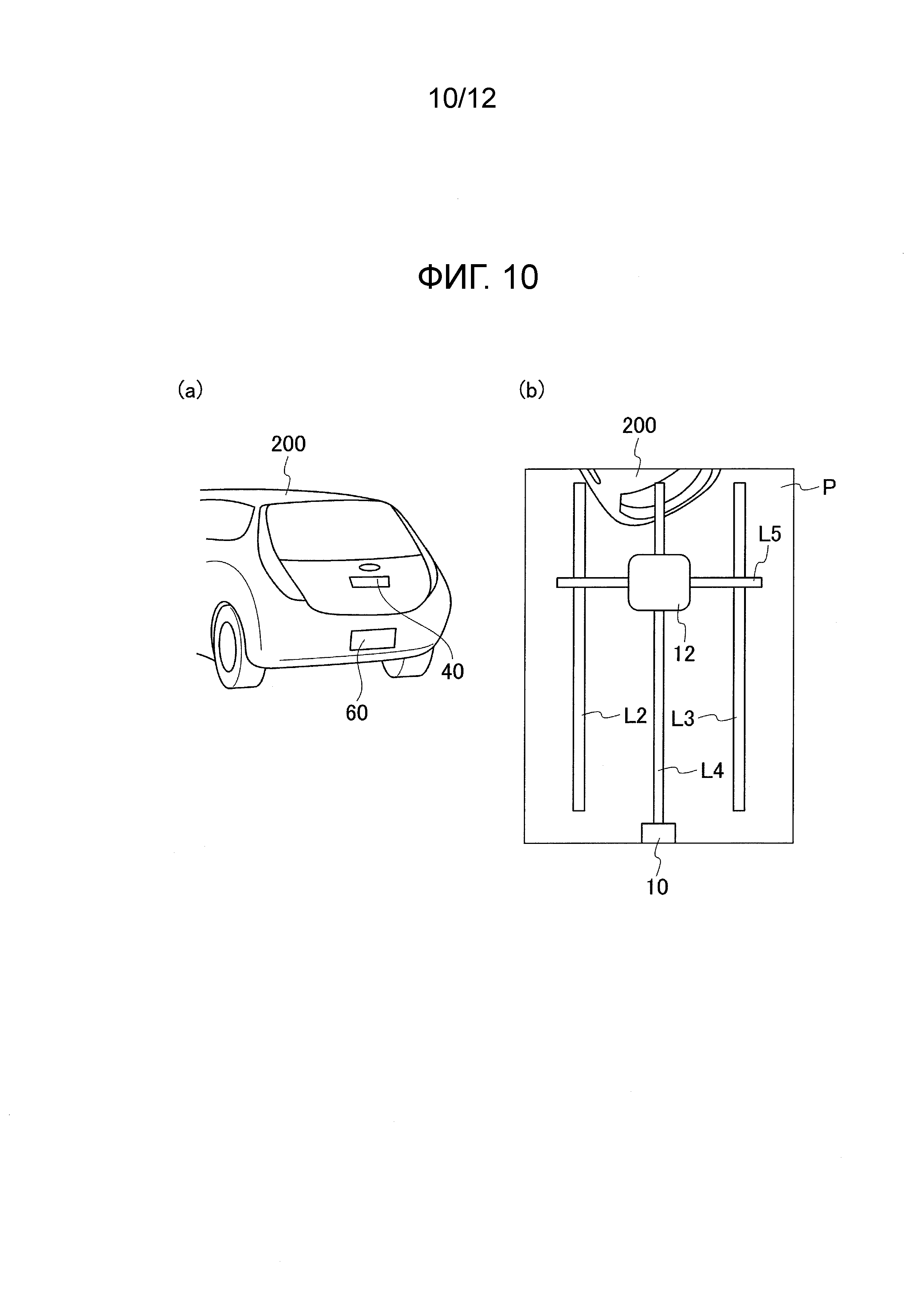
Часть (a) на фиг. 10 - это вид сзади транспортного средства, а часть (b) на фиг. 10 - это пример изображения дисплея во втором варианте осуществления настоящего изобретения.
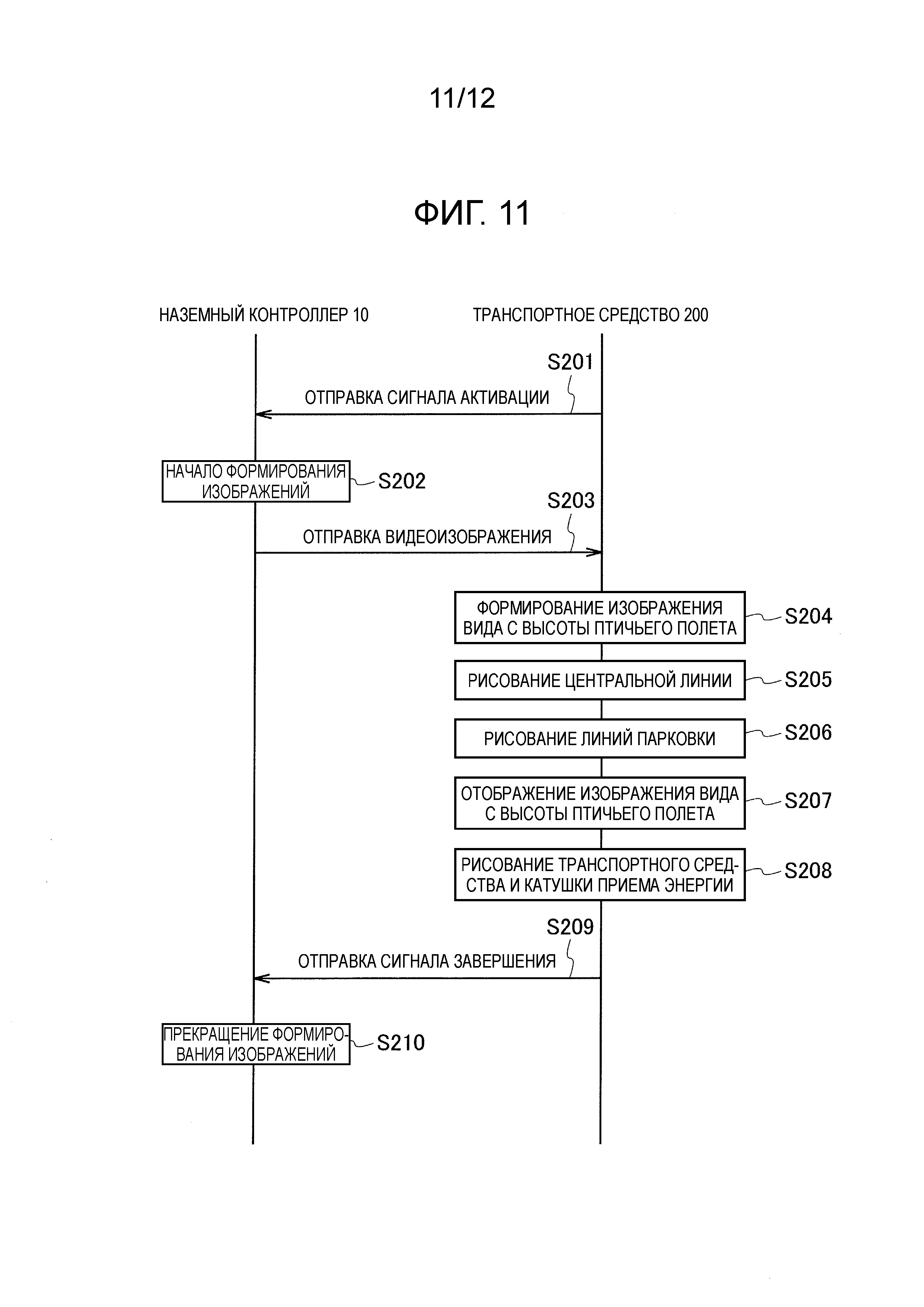
Фиг. 11 - это диаграмма последовательности, изображающая примеры эксплуатации транспортного средства и наземного контроллера во втором варианте осуществления настоящего изобретения.
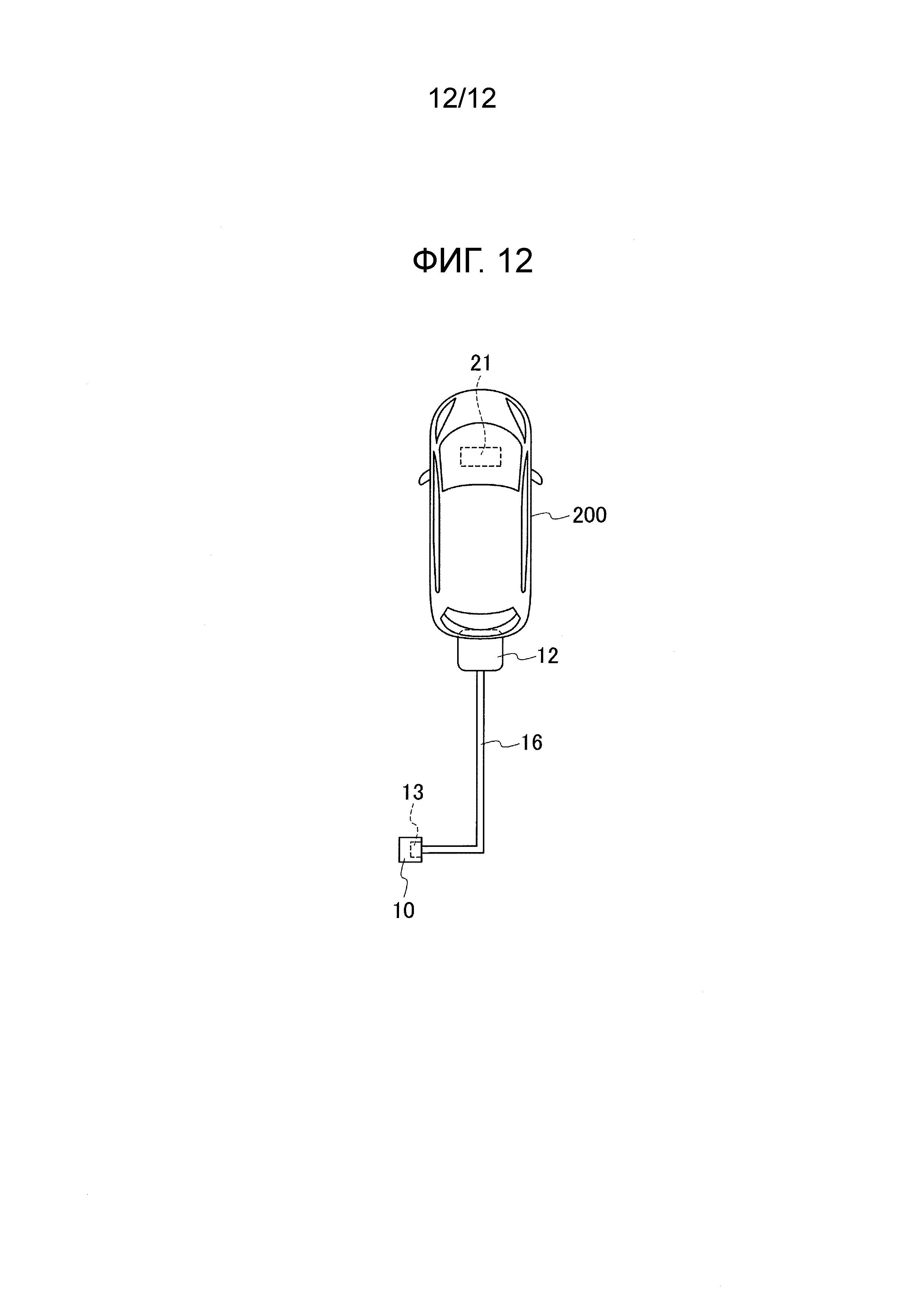
Фиг. 12 - это вид сверху, иллюстрирующий позиционное соотношение между транспортным средством, включающим в себя катушку приема энергии, и площадкой для парковки, включающей в себя катушку передачи энергии.
Описание вариантов осуществления
[0008] Варианты осуществления настоящего изобретения описываются ниже со ссылкой на чертежи. В описании чертежей одинаковые части обозначаются одинаковыми ссылочными номерами, и их описание пропускается.
[0009] [Первый вариант осуществления] Схема общей конфигурации системы помощи при парковке в этом варианте осуществления описывается со ссылкой на чертежи.
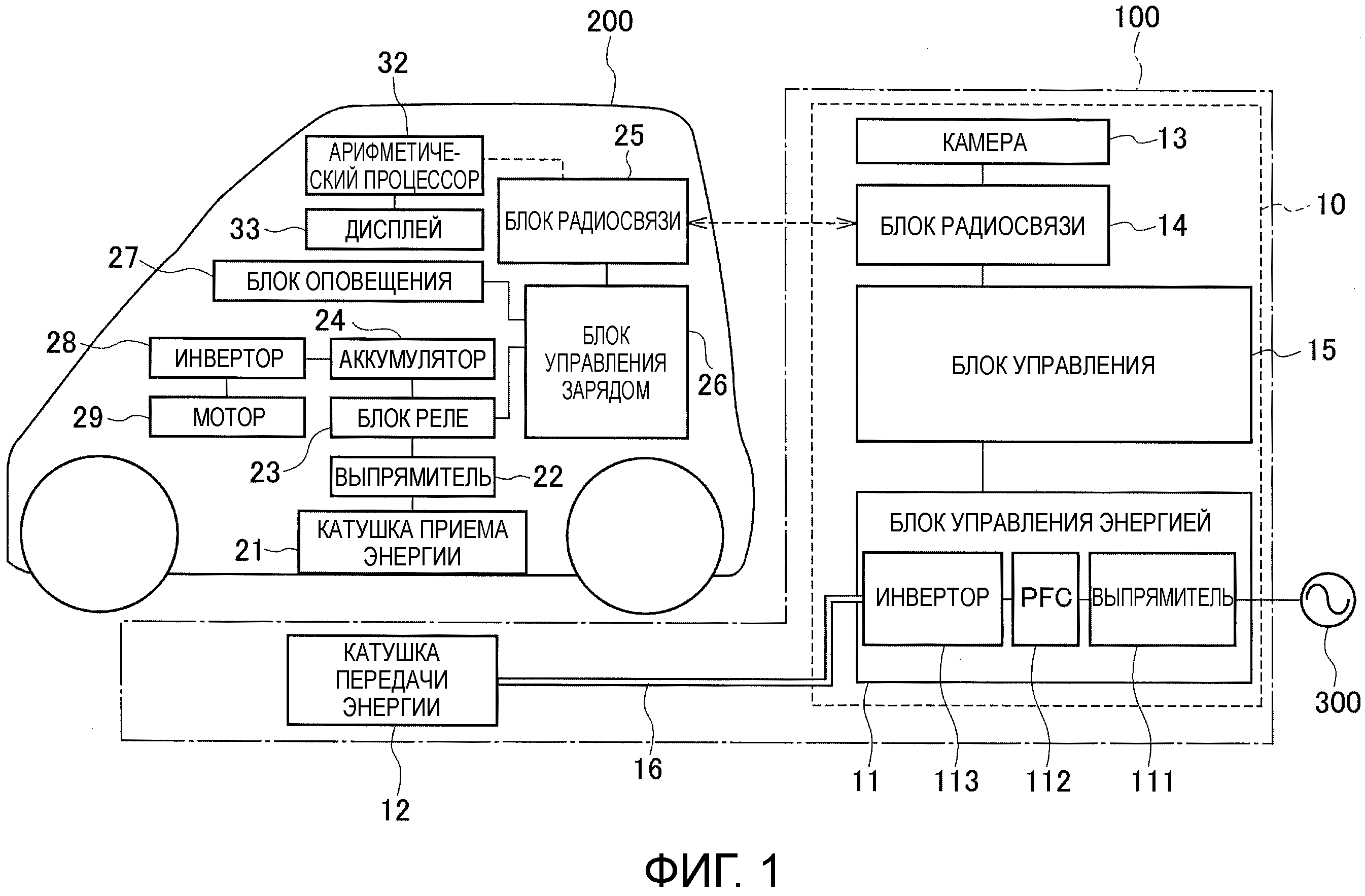
Как иллюстрировано на фиг. 1, система помощи при парковке включает в себя устройство 100 подачи энергии (устройство передачи энергии), расположенное на наземной стороне, такое как система подачи энергии, парковочное место или т.п., и транспортное средство 200 (устройство приема энергии). Энергия бесконтактным образом подается от катушки 12 передачи энергии, предусмотренной в устройстве 100 подачи энергии, к катушке приема энергии 21 на стороне транспортного средства 200. Более конкретно, когда напряжение прикладывается к катушке 12 передачи энергии, магнитное соединение устанавливается между катушкой 12 передачи энергии и катушкой приема энергии 21, и энергия подается от катушки 12 передачи энергии к катушке приема энергии 21. Катушка приема энергии 21 располагается в такой позиции, что катушка приема энергии 21 обращается лицевой стороной к катушке 12 передачи энергии, когда транспортное средство 200 паркуется в предварительно определенной позиции на парковочном месте.
[0010] Устройство 100 подачи энергии включает в себя катушку 12 передачи энергии, кабель 16 для передачи энергии и наземный контроллер 10.
[0011] Кабель 16 для передачи энергии является кабелем, который подает энергию к катушке 12 передачи энергии и предусматривается на поверхности парковочного места, включающего в себя катушку 12 передачи энергии.
[0012] Наземный контроллер 10 является устройством, установленным на земле близко к парковочному месту, и включает в себя камеру 13, блок 14 радиосвязи, блок 15 управления и блок 11 управления энергией.
[0013] Камера 13 (блок формирования изображений) включается в состав наземного контроллера 11 и формирует изображение области около наземного контроллера 10 непрерывным по времени образом. Камера 13 отправляет блоку 14 радиосвязи захваченное видеоизображение (или изображения).
[0014] Блок 14 радиосвязи выполняет двухстороннюю связь с блоком 25 радиосвязи, предусмотренным в транспортном средстве 200.
[0015] Блок 15 управления является частью, которая управляет всем устройством 100 подачи энергии. Блок 15 управления отправляет транспортному средству 200 сигнал, указывающий начало подачи энергии от устройства 100 подачи энергии, и принимает сигнал, запрашивающий прием энергии от устройства 100 подачи энергии, от транспортного средства 200 посредством связи между блоками 14, 25 радиосвязи. Кроме того, блок 15 управления отправляет видеоизображение, захваченное посредством камеры 13, блоку 25 радиосвязи через блок 14 радиосвязи. Кроме того, блок 15 управления выполняет управление переключением инвертора 113 на основе тока, обнаруживаемого посредством датчика тока (не иллюстрирован), чтобы управлять энергией, которая должна быть подана к катушке 12 передачи энергии.
[0016] Блок 11 управления энергией преобразует энергию переменного тока (AC), передаваемую от источника 300 AC-энергии, в высокочастотную AC-энергию, чтобы подавать преобразованную энергию к катушке 12 передачи энергии, и включает в себя выпрямитель 111, PFC-схему 112 и инвертор 113.
[0017] Выпрямитель 111 электрически соединяется с источником 300 AC-энергии и выпрямляет AC-энергию, выводимую от источника 300 AC-энергии.
[0018] PFC 112 является схемой для корректировки коэффициента мощности (корректировка коэффициента мощности) посредством формирования формы волны, выводимой из выпрямителя 111, и подключается между выпрямителем 111 и инвертором 113.
[0019] Инвертор 113 является схемой преобразования энергии, включающей в себя схему PWM-управления, имеющую переключающий элемент, такой как IGBT. Инвертор 113 включает и выключает переключающий элемент на основе тока, обнаруживаемого посредством датчика тока (не иллюстрирован). Затем, инвертор 113 преобразует AC-энергию, передаваемую от источника 300 AC-энергии, в высокочастотную AC-энергию и подает преобразованную энергию катушке 12 передачи энергии.
[0020] Транспортное средство 200 включает в себя катушку приема энергии 21, выпрямитель 22, блок 23 реле, аккумулятор 24, блок 25 радиосвязи, блок 26 управления зарядом, блок 27 оповещения, инвертор 28, мотор 29, арифметический процессор 32 и дисплей 33.
[0021] Катушка приема энергии 21 является катушкой транспортного средства, предусмотренной на поверхности днища транспортного средства 200. Когда транспортное средство 200 паркуется в предварительно определенной позиции парковки, катушка приема энергии 21 и катушка 12 передачи энергии обращаются лицевой стороной друг к другу, в то же время являясь разнесенными друг от друга на предварительно определенное расстояние. Когда энергия для подачи подается к катушке 12 передачи энергии, энергия передается катушке 21 приема энергии, и аккумулятор 24 может, тем самым, заряжаться.
[0022] Выпрямитель 22 соединяется с катушкой 21 приема энергии и выпрямляет AC-энергию, получаемую посредством катушки 21 приема энергии, в энергию постоянного тока (DC).
[0023] Блок 23 реле включает в себя релейный переключатель, который включается и выключается под управлением блока 26 управления зарядом. Кроме того, блок 23 реле отсоединяет систему главной цепи, включающую в себя аккумулятор 24, от катушки 21 приема энергии и выпрямителя 22, которые формируют блок цепи заряда, выключая релейный переключатель.
[0024] Аккумулятор 24 является источником питания транспортного средства 200 и формируется посредством соединения множества аккумуляторных элементов.
[0025] Блок 25 радиосвязи выполняет двухстороннюю связь с блоком 14 радиосвязи, предусмотренным в устройстве 100 подачи энергии.
[0026] Блок 26 управления зарядом является контроллером для управления зарядом аккумулятора 24 и управляет блоком 23 реле, блоком 25 радиосвязи и блоком 27 оповещения. В частности, блок 26 управления зарядом отправляет блоку 15 управления сигнал, указывающий начало заряда, посредством связи между блоками 25, 14 радиосвязи. Кроме того, блок 26 управления зарядом соединяется с контроллером (не иллюстрирован), который управляет всем транспортным средством 200 через CAN-сеть связи. Этот контроллер организует управление переключением инвертора 28 и состоянием заряда (SOC) аккумулятора 24. Когда блок 26 управления зарядом принимает сигнал, указывающий, что аккумулятор 24 полностью заряжен, от контроллера, блок 26 управления зарядом отправляет блоку 15 управления сигнал, указывающий завершение заряда.
[0027] Блок 27 оповещения включает в себя лампу сигнализации, динамик и т.п. и выводит свет, звук и т.п. водителю на основе управления посредством блока 26 управления зарядом.
[0028] Инвертор 28 является схемой преобразования энергии, включающей в себя схему PWM-управления, имеющую переключающий элемент, такой как IGBT, и преобразует DC-энергию, выводимую от аккумулятора 24, в AC-энергию на основе сигнала управления переключением, чтобы подавать преобразованную энергию мотору 29.
[0029] Мотор 29 является источником привода для приведения в движение транспортного средства 200 и является, например, трехфазным электромотором.
[0030] Арифметический процессор 32 (блок управления отображением) может выполнять предварительно определенную обработку изображения по видеоизображению, захватываемому посредством камеры 13, и выполнять управление отображением, посредством которого информация, которая должна отображаться на дисплее 33, переключается.
[0031] Дисплей 33 (устройство отображения) отображает различные части информации водителю и является, например, дисплеем навигационной системы. Дисплей 33 отображает видеоизображение, захваченное посредством камеры 13.
[0032] Отметим, что блок 15 управления, блок 26 управления зарядом и арифметический процессор 32 являются компьютером, включающим в себя CPU, ROM, RAM, информационную шину, соединяющую эти блоки, и интерфейс ввода-вывода, и CPU выполняет предварительно определенную обработку согласно программе, сохраненной в ROM.
[0033] Далее, способ совмещения катушки 21 приема энергии с катушкой 12 передачи энергии в первом варианте осуществления описывается со ссылкой на части (a) и (b) на фиг. 2 по части (a) и (b) на фиг. 5. Отметим, что, в первом варианте осуществления, камера 13 и катушка 12 12 передачи энергии, как предполагается, должны размещаться по прямой линии, протягивающейся в продольном направлении парковки, как иллюстрировано в части (a) на фиг. 2. Кроме того, камера 13, как предполагается, должна размещаться в такой позиции, что камера 13 может захватывать изображение, в котором центр катушки 12 передачи энергии лежит на центральной линии изображения в горизонтальном направлении, как иллюстрировано в части (b) на фиг. 2.
[0034] Как иллюстрировано в части (a) на фиг. 2, когда водитель пытается выполнять парковку транспортного средства 200 задним ходом, чтобы совмещать катушку 21 приема энергии с катушкой 12 передачи энергии (т.е., заряжать аккумулятор 24), транспортное средство 200 отправляет сигнал активации наземному контроллеру 10. Сигнал активации отправляется наземному контроллеру 10, например, когда водитель включает переключатель подачи питания (не иллюстрирован), установленный в транспортном средстве 200.
[0035] Когда наземный контроллер 10 принимает сигнал активации от транспортного средства 200, наземный контроллер 10 активирует камеру 13. Затем, наземный контроллер 10 отправляет транспортному средству 200 видеоизображение, захваченное камерой 13. Арифметический процессор 32 принимает видеоизображение, захваченное камерой 13, и отображает видеоизображение, иллюстрированное в части (b) на фиг. 2, на дисплее 33. В этом случае арифметический процессор 32 отображает видеоизображение, так что центральная линия видеоизображения в горизонтальном направлении совмещается с центральной линией дисплея 33 в горизонтальном направлении. Затем, водитель паркует транспортное средство 200, как иллюстрировано в части (b) на фиг. 3, части (b) на фиг. 4 и части (b) на фиг. 5, в то же время просматривая видеоизображение, иллюстрированное в части (b) на фиг. 2.
[0036] Как иллюстрировано в части (b) на фиг. 2 по часть (b) на фиг. 4, поскольку водитель может парковать транспортное средство 200, в то же время глядя на неподвижную катушку 12 передачи энергии и транспортное средство 200, приближающееся к катушке 12 передачи энергии, на дисплее 33, водитель может легко и интуитивно совмещать катушку 21 приема энергии с катушкой 12 передачи энергии.
[0037] Отметим, что, хотя арифметический процессор 32 отображает видеоизображение, в котором центральная линия видеоизображения в горизонтальном направлении совмещается с центральной линией дисплея 33 в горизонтальном направлении в примере, иллюстрированном в части (b) на фиг. 2 по часть (b) на фиг. 5, видеоизображение может быть обработано и отображено. Например, как иллюстрировано в части (a) на фиг. 6, арифметический процессор 32 может накладывать, на видеоизображение, центральную линию L1 в поперечном направлении транспортного средства, которая проходит через центр катушки 12 передачи энергии. Водитель может, таким образом, более точно совмещать катушку 21 приема энергии с катушкой 12 передачи энергии, паркуя транспортное средство 200 таким образом, что центр транспортного средства 200 совмещается с центральной линией L1.
[0038] Кроме того, как иллюстрировано в части (b) на фиг. 6, арифметический процессор 32 может накладывать, на видеоизображение, линии L2, L3 парковки (две параллельные линии) вдоль направления въезда транспортного средства. Даже когда линии парковки не могут быть начерчены на площадке для парковки вследствие условий размещения, отображение линий L2, L3 парковки в видеоизображении наложенным образом, как описано выше, предоставляет возможность водителю парковать транспортное средство 200 с тем же ощущением, как и в случае, когда линии парковки фактически существуют. Кроме того, поскольку отображение линий L2, L3 парковки наложенным образом, как описано выше, дает ощущение перспективы видеоизображению, водитель может легко и интуитивно совмещать катушку 21 приема энергии с катушкой 12 передачи энергии.
[0039] Далее, примеры эксплуатации транспортного средства 200 и наземного контроллера 10 в первом варианте осуществления описываются со ссылкой на диаграмму последовательности на фиг. 7.
[0040] На этапе S101 транспортное средство 200 отправляет наземному контроллеру 10 сигнал активации.
[0041] На этапе S102, при приеме сигнала активации от транспортного средства 200, наземный контроллер 10 активирует камеру 13 и начинает формирование изображений.
[0042] На этапе S103 наземный контроллер 10 отправляет транспортному средству 200 видеоизображение, захваченное камерой 13.
[0043] На этапе S104 транспортное средство 200 накладывает центральную линию L1 на принятое видеоизображение.
[0044] На этапе S105 транспортное средство 200 накладывает линии L2, L3 парковки на принятое видеоизображение.
[0045] На этапе S106 транспортное средство 200 отображает видеоизображение, обработанное на этапе S104 и этапе S105, на дисплее 33.
[0046] На этапе S107, когда парковка завершена, транспортное средство 200 отправляет наземному контроллеру 10 сигнал завершения, указывающий завершение парковки. Например, транспортное средство 200 может определять, завершена ли парковка, определяя, находится ли рычаг переключения передач в позиции P. Когда рычаг переключения передач находится в позиции P, транспортное средство 200 определяет, что парковка завершена, и отправляет наземному контроллеру 10 сигнал завершения. Альтернативно, транспортное средство 200 может отправлять наземному контроллеру 10 сигнал завершения, когда переключатель зажигания выключается.
[0047] На этапе S108, при приеме сигнала завершения от транспортного средства 200, наземный контроллер 10 останавливает работу камеры 13.
[0048] Как описано выше, в системе помощи при парковке в первом варианте осуществления, следующие действия и результаты могут быть получены.
[0049] Когда совмещение катушки 21 приема энергии с катушкой 12 передачи энергии (парковка) выполнено, водитель выполняет совмещение, в то же время просматривая, на дисплее 33, видеоизображение, захватываемое камерой 13, установленной в наземном контроллере 10. Поскольку катушка 12 передачи энергии является неподвижной на дисплее 33, водитель может выполнять совмещение, в то же время глядя на транспортное средство 200, приближающееся к неподвижной катушке 12 передачи энергии. Водитель может, таким образом, легко и интуитивно совмещать катушку 21 приема энергии с катушкой 12 передачи энергии.
[0050] Кроме того, водитель может просматривать видеоизображение, включающее в себя катушку 12 передачи энергии, с первоначальной стадии парковки. Это предоставляет возможность водителю уяснять состояние катушки 12 передачи энергии, такое как наличие или отсутствие постороннего объекта на катушке 12 передачи энергии, с первоначальной стадии парковки.
[0051] Кроме того, арифметический процессор 32, иллюстрированный на фиг. 1, накладывает центральную линию L1 на видеоизображение, захватываемое камерой 13. Водитель может точно совмещать катушку 21 приема энергии с катушкой 12 передачи энергии, паркуя транспортное средство 200 так, что центр транспортного средства 200 совмещается с центральной линией L1.
[0052] Кроме того, арифметический процессор 32 накладывает линии L2, L3 парковки на видеоизображение, захватываемое камерой 13. Даже когда линии парковки не могут быть начерчены на площадке для парковки вследствие условий размещения, отображение линий L2, L3 парковки в видеоизображении наложенным образом, как описано выше, предоставляет возможность водителю парковать транспортное средство 200 с тем же ощущением, как и в случае, когда линии парковки фактически существуют. Кроме того, поскольку отображение линий L2, L3 парковки наложенным образом, как описано выше, дает ощущение перспективы видеоизображению, водитель может легко и интуитивно совмещать катушку 21 приема энергии с катушкой 12 передачи энергии.
[0053] [Второй вариант осуществления] Далее, второй вариант осуществления настоящего изобретения описывается со ссылкой на фиг. 8-11. Второй вариант осуществления отличается от первого варианта осуществления в том, что арифметический процессор 32 формирует изображение P вида с высоты птичьего полета из изображения, захватываемого камерой 13, и отображает сформированное изображение P вида с высоты птичьего полета на дисплее 33. Конфигурации, перекрывающиеся с конфигурациями первого варианта осуществления, обозначаются теми же ссылочными номерами, и их описание опускается. Моменты, отличающиеся от первого варианта осуществления, главным образом, описываются ниже. Отметим, что, во втором варианте осуществления, позиционная информация о наземном контроллере 10 и катушке 12 передачи энергии, как предполагается, должна быть зарегистрирована в арифметическом процессоре 32 заранее.
[0054] Как иллюстрировано в части (a) на фиг. 8, арифметический процессор 32 отображает и видеоизображение, захватываемое камерой 13, и изображение P вида с высоты птичьего полета, сформированное с помощью этого видеоизображения, на дисплее 33. Описывается способ формирования изображения P вида с высоты птичьего полета. Арифметический процессор 32 рисует наземный контроллер 10 и катушку 12 передачи энергии с помощью позиционной информации о наземном контроллере 10 и катушке 12 передачи энергии, зарегистрированной заранее. Далее, арифметический процессор 32 рисует продольную направляющую линию L4, соединяющую нарисованный наземный контроллер 10 и изображенную катушку 12 передачи энергии, и поперечную направляющую линию L5, пересекающую продольную направляющую линию L4 под прямым углом в центре катушки 12 передачи энергии. Кроме того, арифметический процессор 32 рисует линии L2, L3 парковки с левой и правой сторон продольной направляющей линии L4 на предварительно определенном расстоянии от нее (например, 1 м).
[0055] Данные, в которых длина в относительных единицах в видеоизображении, захваченном камерой 13, преобразуется в длину в реальном мире, регистрируются в наземном контроллере 10. Эти данные могут быть получены посредством экспериментов и имитаций заранее. Наземный контроллер 10 отправляет арифметическому процессору 32 эти данные вместе с видеоизображением, захваченным камерой 13.
[0056] Арифметический процессор 32 может рисовать транспортное средство 200 в изображении P вида с высоты птичьего полета, вычисляя расстояние от наземного контроллера 10 до транспортного средства 200 с помощью принятых данных. Кроме того, арифметический процессор 32 может рисовать транспортное средство 200 и катушку 21 приема энергии в изображении P вида с высоты птичьего полета, как иллюстрировано в части (b) на фиг. 8, с помощью габаритных размеров транспортного средства 200 и позиционной информации, указывающей установленную позицию катушки 21 приема энергии, которые регистрируются заранее.
[0057] Водитель совмещает катушку 21 приема энергии с катушкой 12 передачи энергии, в то же время просматривая видеоизображение, захваченное камерой 13, и изображение P вида с высоты птичьего полета, иллюстрированное в частях (a) и (b) на фиг. 8.
[0058] Кроме того, арифметический процессор 32 может формировать изображение P вида с высоты птичьего полета не только при парковке задним ходом, но также при парковке передним ходом. Как иллюстрировано в части (a) на фиг. 9, арифметический процессор 32 может определять, какая парковка из парковки задним ходом и парковки передним ходом выполняется, на основе, например, позиции эмблемы 40, установленной на транспортном средстве 200, и наличия или отсутствия передних фар 50. Затем, когда определяется, что выполняется парковка передним ходом, арифметический процессор 32 может формировать изображение P вида с высоты птичьего полета, иллюстрированное в части (b) на фиг. 9.
[0059] Кроме того, арифметический процессор 32 может формировать изображение P вида с высоты птичьего полета также, когда транспортное средство 200 въезжает на парковочное место под некоторым углом. Например, как иллюстрировано в части (a) на фиг. 10, арифметический процессор 32 может вычислять угол въезда транспортного средства 200 из степеней деформации эмблемы 40 и номерного знака 60 от случая, когда эмблема 40 и номерной знак 60 рассматриваются с передней стороны. Затем, арифметический процессор 32 может формировать изображение P вида с высоты птичьего полета, иллюстрированное в части (b) на фиг. 10, с помощью вычисленного угла въезда.
[0060] Далее, примеры эксплуатации транспортного средства 200 и наземного контроллера 10 во втором варианте осуществления описываются со ссылкой на фиг. 11.
[0061] Поскольку примеры эксплуатации на этапах S201-S203 являются такими же, что и примеры эксплуатации на этапах S101-S103, иллюстрированных на фиг. 7, их описание опускается.
[0062] На этапе S204 транспортное средство 200 формирует изображение P вида с высоты птичьего полета с помощью принятого видеоизображения.
[0063] На этапе S205 транспортное средство 200 накладывает центральную линию L1 на принятое видеоизображение.
[0064] На этапе S206 транспортное средство 200 накладывает линии L2, L3 парковки на принятое видеоизображение.
[0065] На этапе S207 транспортное средство 200 отображает изображение P вида с высоты птичьего полета, сформированное на этапе S204, видеоизображение, обработанное на этапе S205 и этапе S206, на дисплее 33.
[0066] На этапе S208 транспортное средство 200 накладывает транспортное средство 200 и катушку 21 приема энергии на изображение P вида с высоты птичьего полета.
[0067] Поскольку примеры эксплуатации на этапах S209-S210 являются такими же, что и примеры эксплуатации на этапах S107-S108, иллюстрированных на фиг. 7, их описание опускается.
[0068] Как описано выше, в системе помощи при парковке во втором варианте осуществления, следующие действия и результаты могут быть получены.
[0069] Когда совмещение катушки 21 приема энергии с катушкой 12 передачи энергии выполняется, водитель выполняет совмещение, в то же время просматривая, на дисплее 33, видеоизображение, захваченное камерой 13, и изображение P вида с высоты птичьего полета, сформированное с помощью этого видеоизображения. Поскольку катушка 12 передачи энергии является неподвижной на дисплее 33, водитель может выполнять совмещение, в то же время видя транспортное средство 200, приближающееся к неподвижной катушке 12 передачи энергии. Кроме того, катушка 12 передачи энергии и катушка приема энергии 21 одновременно отображаются в изображении P вида с высоты птичьего полета. Водитель может, таким образом, легко и интуитивно совмещать катушку приема энергии 21 с катушкой 12 передачи энергии.
[0070] Кроме того, система помощи при парковке может определять, какая одна из парковки задним ходом и парковки передним ходом выполняется, на основе позиции эмблемы 40, установленной на транспортном средстве 200 и наличия или отсутствия передних фар 50. Система помощи при парковке может, таким образом, формировать изображение P вида с высоты птичьего полета в обоих случаях парковки задним ходом и парковки передним ходом.
[0071] Кроме того, система помощи при парковке может получать угол, под которым транспортное средство 200 въезжает на парковочное место. Система помощи при парковке может, таким образом, формировать изображение P вида с высоты птичьего полета, соответствующее углу въезда.
[0072] Хотя варианты осуществления настоящего изобретения были описаны выше, не должно подразумеваться, что описание и чертежи, формирующие часть этого описания изобретения, ограничивают настоящее изобретение. Из этого описания изобретения различные альтернативные варианты осуществления, примеры и операционные техники будут найдены специалистами в области техники. Например, как иллюстрировано на фиг. 12, аналогичная помощь при парковке может выполняться, даже когда позиция, где устанавливается наземный контроллер 10, изменяется.
Список ссылочных знаков
[0073] 10 наземный контроллер
12 катушка 12 передачи энергии
13 камера
15 блок управления
21 катушка приема энергии
25 блок радиосвязи
32 арифметический процессор
33 дисплей
100 устройство подачи энергии
200 транспортное средство.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство беспроводной подачи энергии и устройство помощи при парковке
Устройство помощи при парковке и способ помощи при парковке

