Результат интеллектуальной деятельности: Гироскопический маятник
Вид РИД
Изобретение
Изобретение относится к гироскопической технике и может найти применение в составе одноосных или двухосных гировертикалей, построенных на базе силовых гироскопических стабилизаторов и совершающих движение близкое к горизонтальному.
Известен маятниковый чувствительный элемент ДЖМ-9Б, который применяется в гировертикалях, например в МГВ-1С, МГВ-2, в качестве элемента коррекции. Конструкция его состоит из стеклянного герметичного цилиндра, частично заполненного токопроводящей жидкостью. В цилиндр вварены три контакта: один, центральный, находится всё время в жидкости, два других контакта частично покрыты жидкостью и при наклонах корпуса ДЖМ-9Б относительно плоскости местного горизонта изменяют свои переходные сопротивления, что и является выходным параметром этого датчика. ДЖМ-9Б включается в цепи продольной и поперечной коррекций гировертикалей.
Однако при действии линейных ускорений и, в частности, при центростремительных ускорениях при виражах (разворотах) жидкость внутри ДЖМ-9Б отклоняется к ложной вертикали, что приводит к выдаче ложного сигнала и, следовательно, к значительным погрешностям в определении углов ориентации.
Для сравнительного анализа взят датчик акселерометра с поплавковым подвесом ДА-1, который состоит из поплавкового узла с нижней маятниковостью и с полуосями подвеса, установленными в корпусе. Внутри подвеса находится рамка со смещённым для создания нижней маятниковости центром масс, при этом к поплавковому узлу крепится ротор датчика угла и ротор датчика момента, статоры которых крепятся в корпусе, к которому жёстко прикреплён сильфон для компенсации изменения объёма жидкости, заполняющей внутреннюю полость между поплавковым узлом и корпусом. Для измерения ускорения (например, с целью измерения угла отклонения от вертикали) датчик угла подключается к датчику момента через усилитель.
Недостатком данного устройства, взятого за прототип, является принципиальная невозможность устранять погрешности на вираже (при разворотах) при измерении угла отклонения от вертикали, так как при действии центростремительного ускорения на вираже возникает инерционный момент, который отклоняет поплавковый узел к ложной вертикали. Виражные погрешности существенно снижают точность сигнала отклонения от местного горизонта (вертикали).
Техническим результатом изобретения является повышение точности формирования выходного сигнала отклонения от местного горизонта (вертикали).
Технический результат достигается тем, что в гироскопическом маятнике, содержащем поплавковый узел с нижней маятниковостью, установленным своими полуосями в корпусе гиромаятника и состоящем из рамки, помещённой в поплавковый узел, с которой жёстко связан ротор датчика угла, а статор – с корпусом гиромаятника, на котором жёстко закреплён сильфон, полость которого и полость между корпусом и поплавковым узлом заполнены жидкостью, новым является то, что в рамке поплавкового узла установлен гиромотор, который подключён к контуру управления скоростью вращения ротора гиромотора, состоящему из последовательно соединённых датчика линейной скорости подвижного объекта и масштабного усилителя и регулирующему угловую скорость ротора гиромотора в соответствии с формулой
 ,
,
где  – линейная скорость объекта;
– линейная скорость объекта;  – маятниковость гиромаятника;
– маятниковость гиромаятника;  ,
,  – угловая скорость вращения ротора гиромотора гиромаятника и его осевой момент инерции.
– угловая скорость вращения ротора гиромотора гиромаятника и его осевой момент инерции.
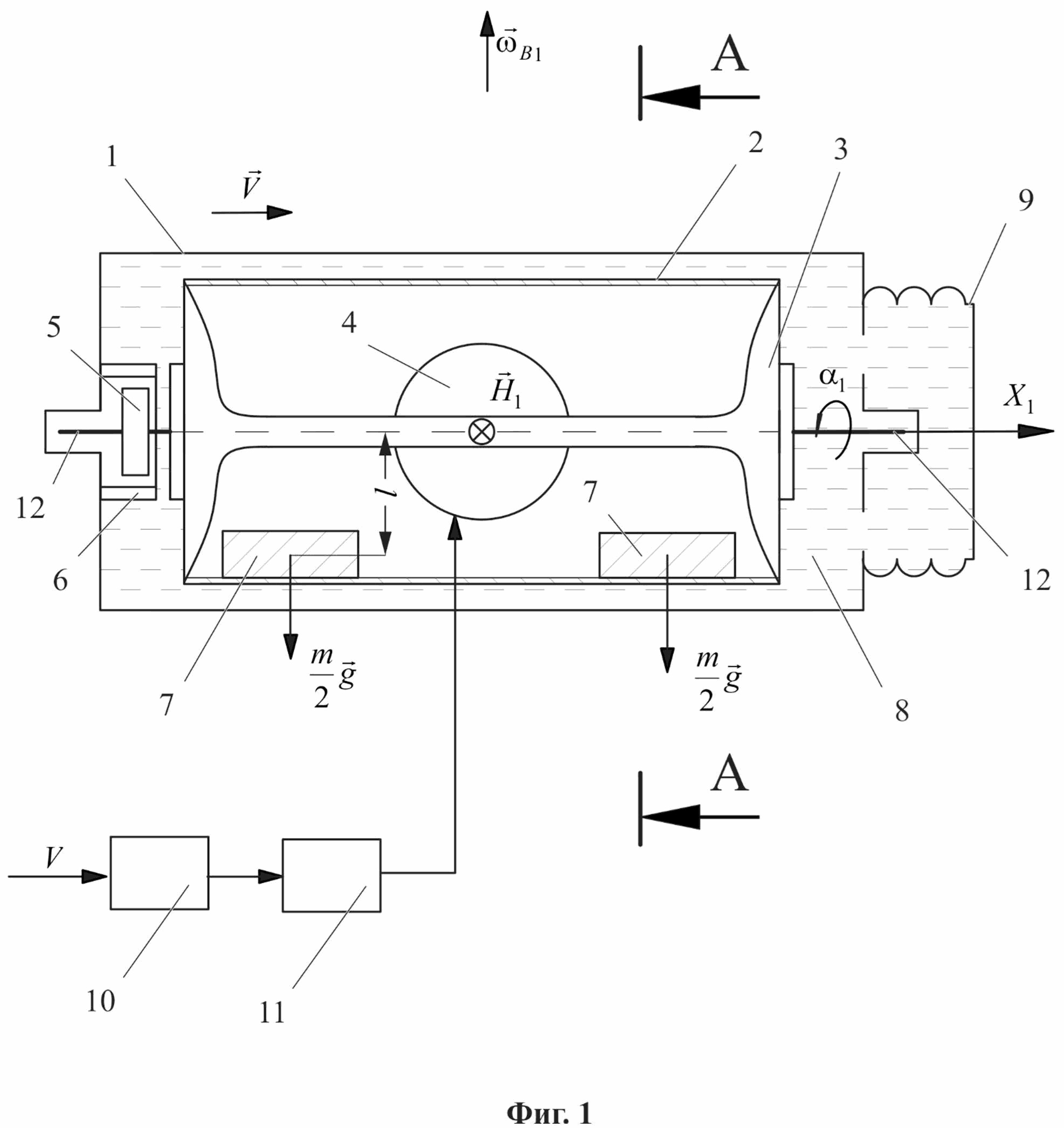
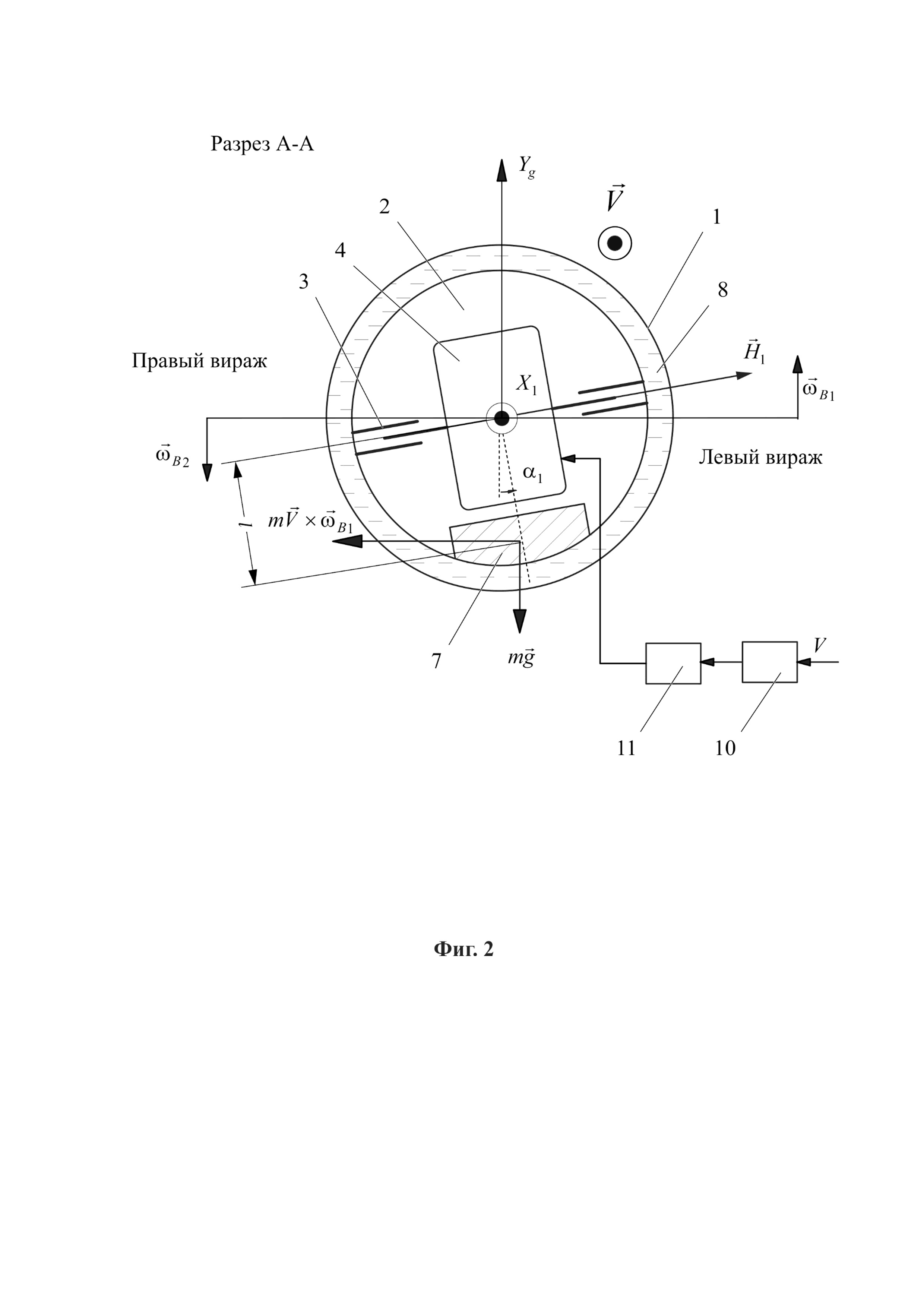
Сущность изобретения поясняется фигурами, где фиг. 1 – продольный разрез гироскопического маятника, фиг. 2 – поперечный разрез гироскопического маятника, являющийся разрезом «А-А» на фиг. 1. На фиг.1, 2 приняты следующие обозначения:
1 – корпус гиромаятника;
2 – поплавковый узел гиромаятника;
3 – рамка поплавкового узла гиромаятника;
4 – ротор гиромотора гиромаятника;
5 – ротор датчика угла поворота поплавкового узла гиромаятника;
6 – статор датчика угла поворота поплавкового узла гиромаятника;
7 – грузики для создания нижней маятниковости;
8 – жидкость;
9 – сильфон;
10 – датчик линейной скорости объекта;
11 – масштабный усилитель;
12 – полуоси подвеса поплавкового узла;
 – кинетический момент ротора гиромотора гиромаятника;
– кинетический момент ротора гиромотора гиромаятника;
 – угол поворота поплавкового узла гиромаятника относительно вертикали места;
– угол поворота поплавкового узла гиромаятника относительно вертикали места;
 ,
,  – линейная скорость объекта и вектор линейной скорости объекта соответственно;
– линейная скорость объекта и вектор линейной скорости объекта соответственно;
 – вектор угловой скорости виража (
– вектор угловой скорости виража ( - вектор угловой скорости левого виража,
- вектор угловой скорости левого виража,  - вектор угловой скорости правого виража);
- вектор угловой скорости правого виража);
 – сила тяжести, действующая на грузики;
– сила тяжести, действующая на грузики;
 – расстояние от оси вращения поплавкового узла гиромаятника до центра масс грузиков;
– расстояние от оси вращения поплавкового узла гиромаятника до центра масс грузиков;
 – ось подвеса поплавкового узла гиромаятника;
– ось подвеса поплавкового узла гиромаятника;
 – местная вертикаль.
– местная вертикаль.
Гироскопический маятник построен на основе поплавкового датчика акселерометра, состоящего из корпуса 1, заполненного жидкостью 8, поплавкового маятникового узла 2, установленного полуосями подвеса 12 в корпусе прибора. Датчик угла поворота поплавкового маятникового узла состоит из ротора 5, жёстко связанного с ним, и статора 6, закреплённого в корпусе 1. Сигнал датчика угла поворота поплавкового маятникового узла является выходным сигналом гиромаятника, который может использоваться для коррекции силовых гировертикалей. В поплавковом маятниковом узле в рамке 3 располагается гиромотор гиромаятника с ротором 4. Поплавковый маятниковый узел выполнен со смещённым вниз центром масс относительно оси подвеса гиромаятника для создания необходимой нижней маятниковости (на фиг. 1,2 это условно показано наличием грузиков 7 в нижней части поплавкового маятникового узла 2). Пространство внутри поплавкового маятникового узла 2 заполнено инертным газом. Для компенсации изменения объёма жидкости служит сильфон 9. Гиромаятник, например, может служить элементом коррекции и располагаться в одноосной или двухосной силовых гировертикалях таким образом, чтобы ось подвеса гиромаятника была направлена параллельно продольной оси подвижного объекта. Контур управления скоростью вращения ротора 4 гиромотора состоит из последовательно соединенных датчика линейной скорости объекта 10, масштабного усилителя 11, на вход которого подаётся сигнал датчика линейной скорости, а на выход подключён гиромотор гиромаятника.
Гиромаятник работает следующим образом. При движении по криволинейной траектории в плоскости горизонта в системе отсчёта связанной с устройством на гиромаятник действуют гироскопический момент, момент силы инерции и момент силы тяжести, показанные на фиг. 1 и фиг. 2. На фиг. 1 и фиг. 2 изображён левый разворот, причём на фиг.2 поплавковый маятниковый элемент 2 показан повёрнутым на угол  (с условно не показанным сильфоном). Сумма всех моментов сил в проекции на ось
(с условно не показанным сильфоном). Сумма всех моментов сил в проекции на ось  запишется в виде:
запишется в виде:
 ,
,
где ∑MX1 – сумма проекций моментов, действующих на гиромаятник, по оси ;
 – гироскопический момент, обусловленный угловой скоростью виража (разворота)
– гироскопический момент, обусловленный угловой скоростью виража (разворота)  ;
;
 – инерционный момент, обусловленный центростремительным ускорением
– инерционный момент, обусловленный центростремительным ускорением  при вираже (развороте) с ;
при вираже (развороте) с ;
 – момент силы тяжести, обусловленный нижней маятниковостью;
– момент силы тяжести, обусловленный нижней маятниковостью;
 – момент дрейфа по оси подвеса поплавкового узла.
– момент дрейфа по оси подвеса поплавкового узла.
По основному уравнению динамики вращательного движения запишем дифференциальное уравнение вращения для поплавкового маятникового узла
 ,
,
где  – момент инерции поплавкового маятникового узла;
– момент инерции поплавкового маятникового узла;  – первая и вторая производные угла
– первая и вторая производные угла  ,
,  – коэффициент вязкого сопротивления.
– коэффициент вязкого сопротивления.
С учётом выражения для ∑MX1 уравнение поплавкового маятникового узла запишется в виде:
 .
.
Чтобы угловая скорость виража  и, как следствие, центростремительное ускорение не приводило к отклонению поплавкового узла гиромаятника к ложной вертикали, необходимо на параметры гиромаятника наложить условие
и, как следствие, центростремительное ускорение не приводило к отклонению поплавкового узла гиромаятника к ложной вертикали, необходимо на параметры гиромаятника наложить условие
 ,
,
которое можно назвать условием инвариантности гиромаятника к угловой скорости виража.
Так как кинетический момент ротора гиромотора гиромаятника определяется по формуле  , то условие инвариантности примет вид
, то условие инвариантности примет вид
 ,
,
где  ,
,  – угловая скорость вращения и осевой момент инерции ротора гиромотора гиромаятника.
– угловая скорость вращения и осевой момент инерции ротора гиромотора гиромаятника.
Это условие подчёркивает тот факт, что угловой скоростью вращения ротора гиромотора гиромаятника необходимо управлять пропорционально скорости движения подвижного объекта, а реализуется это условие с помощью контура управления скоростью вращения ротора гиромотора, состоящего из последовательно соединённых датчика линейной скорости объекта 10 и масштабного усилителя 11.
Таким образом, независимо от виража поведение гиромаятника будет описываться уравнением
 ,
,
которое подчёркивает, что при движении по криволинейной траектории в плоскости горизонта виражные погрешности у гиромаятника отсутствуют.
Следовательно, и цепь коррекции гировертикали, в которой сигнал гиромаятника используется в качестве сигнала коррекции, тоже будет работать без виражных погрешностей.
Реализация устройства.
Чтобы иметь возможность регулировать угловую скорость  , гиромотор гиромаятника может быть выполнен в виде электрического двигателя постоянного тока. Предположим, что масса грузика 7
, гиромотор гиромаятника может быть выполнен в виде электрического двигателя постоянного тока. Предположим, что масса грузика 7  =0,02 кг, а смещение центра масс груза относительно оси подвеса
=0,02 кг, а смещение центра масс груза относительно оси подвеса  =0,012 м. Тогда, если предположить, что скорость V объекта в процессе движения меняется в диапазоне от 5 мс-1 до 20 мс-1, то кинетический момент гиромотора
=0,012 м. Тогда, если предположить, что скорость V объекта в процессе движения меняется в диапазоне от 5 мс-1 до 20 мс-1, то кинетический момент гиромотора  будет изменяться в диапазоне от 0,0012 Нмс до 0,0048 Нмс. Так как конструктивно ротор гиромотора представляет полый цилиндр, то, задав его размеры, можно определить массу, момент инерции ротора и его угловую скорость.
будет изменяться в диапазоне от 0,0012 Нмс до 0,0048 Нмс. Так как конструктивно ротор гиромотора представляет полый цилиндр, то, задав его размеры, можно определить массу, момент инерции ротора и его угловую скорость.
Вариант 1.
 – наружный радиус ротора;
– наружный радиус ротора;
 – внутренний радиус ротора;
– внутренний радиус ротора;
 – ширина ротора;
– ширина ротора;
 – средняя плотность материала ротора,
– средняя плотность материала ротора,



Вариант 2.
 – наружный радиус ротора;
– наружный радиус ротора;
– внутренний радиус ротора;
 – ширина ротора;
– ширина ротора;
– средняя плотность материала ротора,
можно определить массу, момент инерции ротора и его угловую скорость



Полученные значения угловой скорости вполне реализуемы как для гиромоторов, построенных на основе двигателей постоянного тока, так и переменного с частотным управлением.
Таким образом, если в гиромаятнике скомпенсированы виражные погрешности, то погрешность формирования горизонтальной плоскости будет определяться в основном моментом дрейфа  в оси подвеса поплавкового узла гиромаятника, величина которого имеет порядок
в оси подвеса поплавкового узла гиромаятника, величина которого имеет порядок  =0,05÷0,1 Гсм и, соответственно, погрешность формирования горизонтальной плоскости составит 3÷4 угловые минуты.
=0,05÷0,1 Гсм и, соответственно, погрешность формирования горизонтальной плоскости составит 3÷4 угловые минуты.
В прототипе угол отклонения ложной вертикали фактически измеряется и определяется величиной
 ,
,
которую можно трактовать как погрешность и которая составляет 3̊ при  , что значительно больше погрешности гиромаятника, инвариантного к виражу.
, что значительно больше погрешности гиромаятника, инвариантного к виражу.
Кроме того, областью применения корректирующего устройства в виде гиромаятника могут быть силовые гировертикали для подвижных объектов, совершающих движение близкое к горизонтальному. Это, к примеру, корабли, подводные лодки, путеизмерители.
Применение предложенной схемы построения гиромаятника позволяет существенно снизить виражные погрешности в выходном сигнале гиромаятника за счёт компенсации инерционного момента на вираже гироскопическим моментом путём введения контура управления скоростью вращения ротора гиромотора пропорционально скорости движения подвижного объекта.








Регулируемый ветродвигатель
Импульсный лазерный ракетный двигатель для систем ориентации, стабилизации и коррекции низкоорбитальных космических летательных аппаратов с малой массой
Устройство для определения размеров наночастиц в турбулентном воздушном потоке в зависимости от влияния изменений их общей концентрации
Способ определения параметров моментного двигателя постоянного тока
Способ управления рысканьем буксируемого подводного объекта
Авиационное противопожарное устройство с выдвижным форсуночным блоком
Способ термомеханической сварки разнородных сплавов
Способ измерения комплексной диэлектрической проницаемости материала в диапазоне свч
Двухканальный датчик угловой скорости
Тренажер для изучения гирополукомпаса
Устройство управления креновой рамой курсовертикали
Устройство создания нагрузочного момента двигателя постоянного тока
Способ определения параметров моментного двигателя постоянного тока

