Результат интеллектуальной деятельности: Устройство управления креновой рамой курсовертикали
Вид РИД
Изобретение
Изобретение относится к гироскопической технике и может быть применено для управления креновой рамой индикаторной курсовертикали, построенной на базе гировертикали и гирополукомпаса.
Известно устройство управления креновой рамой (дополнительной рамой) дистанционного авиагоризонта АГД-1 (Михайлов О.И., Козлов И.М., Гергель Ф.С. Авиационные приборы. М.: Машиностроение, 1977), состоящее из креновой рамы, с которой кинематически связан двигатель-генератор и датчик угла крена. При этом гировертикаль, имеющая системы продольной и поперечной коррекций, наружной рамой установлена в креновую раму. Для управления креновой рамой на двигатель двигателя-генератора через усилитель подключен индукционный датчик угла, кинематически связанный с осью подвеса внутренней рамки гировертикали.
Недостатком такой схемы управления является неустойчивая работа креновой рамы при углах тангажа  в районе
в районе  , так как индукционный датчик и двигатель-генератор при такой эволюции будут находиться на осях, которые практически взаимно перпендикулярны. Это приводит к большим погрешностям при измерении угла крена, или, другими словами, показания по углу крена становятся неопределенными.
, так как индукционный датчик и двигатель-генератор при такой эволюции будут находиться на осях, которые практически взаимно перпендикулярны. Это приводит к большим погрешностям при измерении угла крена, или, другими словами, показания по углу крена становятся неопределенными.
Известна курсовертикаль КВ-2Н (Система курсовертикали типа СКВ-2Н. Руководство по эксплуатации и техническому обслуживанию. М.: Машиностроение, 1975), взятая за прототип. Устройство управления креновой рамой курсовертикали содержит гировертикаль с системами продольной и поперечной коррекций и индукционным датчиком угла, установленным на оси подвеса внутренней рамы, при этом наружная рама, на оси подвеса которой закреплен датчик угла тангажа (сельсин-датчик), кинематически установлена в креновую раму, с осью подвеса которой кинематически соединены датчик угла крена (сельсин-датчик) и первый двигатель отработки, вход которого электрически соединен с выходом первого усилителя, гирополукомпас (узел курса) с системой горизонтальной коррекции, наружной рамой, на оси подвеса которой закреплен датчик угла курса (сельсин-датчик курса), кинематически установлен в тангажную раму, на оси подвеса которой, расположенной перпендикулярно оси подвеса креновой рамы, установлены приемник угла тангажа, электрически соединенный с датчиком угла тангажа, и второй двигатель отработки, подключенный к выходу второго усилителя, вход которого соединен с выходом приемника угла тангажа, а также регулятор креновой рамы, который представляет электромеханическое вычислительное устройство, состоящее из механизма согласования курса, который содержит сельсин-приемник курса, усилитель, двигатель-генератор, электромагнитную муфту и реле, и механизма согласования тангажа, состоящего из сельсина-приемника тангажа, усилителя, двигателя-генератора, сельсина-датчика и коммутаторов в виде реле. Механизмы согласования курса и тангажа представляют следящие системы, при этом при углах тангажа лежащих в диапазонах  , механизм согласования курса запоминает угол курса и выход ротора сельсина-приемника подключается электрически к ротору сельсина-датчика механизма согласования тангажа, который механически продолжает отрабатывать следящая система. При этом со статора сельсина-датчика механизма согласования тангажа снимается сигнал в виде
, механизм согласования курса запоминает угол курса и выход ротора сельсина-приемника подключается электрически к ротору сельсина-датчика механизма согласования тангажа, который механически продолжает отрабатывать следящая система. При этом со статора сельсина-датчика механизма согласования тангажа снимается сигнал в виде
 ,
,
если же угол тангажа не принадлежит указанному диапазону, то управление первым двигателем отработки будет происходить по сигналу индукционного датчика, минуя регулятор рамы

где  ,
, , – коэффициенты передачи по указанным каналам управления;
, – коэффициенты передачи по указанным каналам управления;  – угол между плоскостью наружной рамы и плоскостью, в которой расположены ось ротора гиромотора и ось внутренней рамы гировертикали;
– угол между плоскостью наружной рамы и плоскостью, в которой расположены ось ротора гиромотора и ось внутренней рамы гировертикали;  приращение угла курса
приращение угла курса  , которое определяется как
, которое определяется как  , где
, где  угол курса, запомненный в момент начала выполнения граничных условий по углу тангажу;
угол курса, запомненный в момент начала выполнения граничных условий по углу тангажу;  угол тангажа самолета.
угол тангажа самолета.
Зависимость  от
от  объясняется кинематикой карданового подвеса при измерении индукционным датчиком угла внутреннего крена
объясняется кинематикой карданового подвеса при измерении индукционным датчиком угла внутреннего крена  , что влияет на точность отработки креновой рамы.
, что влияет на точность отработки креновой рамы.
Кроме того, все переключения осуществляет группа реле по сигналам контактных датчиков, расположенных на оси наружной рамы гировертикали, которые формируют граничные значения углов тангажа.
Недостатком прототипа является громоздкая конструктивная реализация регулятора рамы, а именно механизмов согласования курса и тангажа, а также пониженная точность формирования управляющего напряжения двигателем отработки креновой рамы, что свойственно аналоговым электро-механическим вычислителям, а это, в конечном счете, приведет к повышенным погрешностям в измерении угла крена при траекториях полета с углами тангажа близкими к 
Технический результат, на достижение которого направлено заявленное изобретение, заключается в упрощении устройства управления креновой рамой курсовертикали и в повышении точности работы при неограниченных углах тангажа.
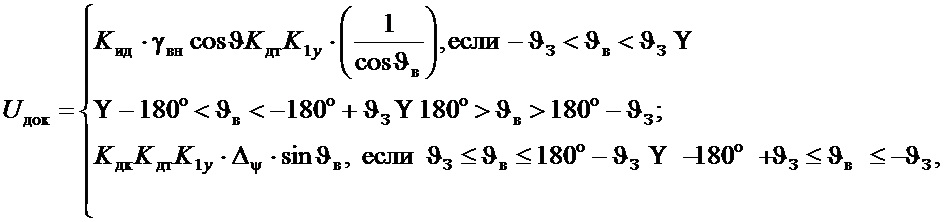
Технический результат достигается тем, что в устройстве управления креновой рамой курсовертикали, содержащем гировертикаль с системами продольной и поперечной коррекций и индуктивным датчиком угла, установленным на оси подвеса внутренней рамы, при этом наружная рама, на оси подвеса которой закреплен датчик угла тангажа, кинематически установлена в креновую раму, с осью подвеса которой кинематически соединены датчик угла крена и первый двигатель отработки, вход которого электрически соединен с выходом первого усилителя, гирополукомпас с системой горизонтальной коррекции, на оси подвеса наружной рамы которого закреплен датчик угла курса, кинематически установлен в тангажную раму, на оси подвеса которой, расположенной перпендикулярно оси подвеса креновой рамы, установлены приемник угла тангажа, электрически соединенный с датчиком угла тангажа, и второй двигатель отработки, подключенный к выходу второго усилителя, вход которого соединен с выходом приемника угла тангажа, а также регулятор креновой рамы, новым является то, что регулятор рамы выполнен в виде микроконтроллера, выходной порт которого через преобразователь код-аналог соединен с входом первого усилителя, а на первый – пятый его входные порты соответственно подключены первый – пятый преобразователи аналог-код, входы которых соединены соответственно с выходами индуктивного датчика, синусной и косинусной обмотками датчика угла тангажа, синусной и косинусной обмотками датчика угла курса, при этом в микроконтроллере формируется напряжение управления первым двигателем отработки в соответствии с формулами  где
где  – коэффициенты передачи индуктивного датчика, датчика угла тангажа, датчика угла курса и первого усилителя;
– коэффициенты передачи индуктивного датчика, датчика угла тангажа, датчика угла курса и первого усилителя;  – угол неперпендикулярности между плоскостью наружной рамы и осью ротора гиромотора гировертикали;
– угол неперпендикулярности между плоскостью наружной рамы и осью ротора гиромотора гировертикали;  – приращение текущего угла курса
– приращение текущего угла курса  относительно угла курса
относительно угла курса  , запомненного в момент начала выполнения условия
, запомненного в момент начала выполнения условия 
 текущий, заданный и вычисленный углы тангажа самолета.
текущий, заданный и вычисленный углы тангажа самолета.
Сущность изобретения поясняется чертежами, приведёнными на фиг.1, фиг.2. При этом на фиг.1 представлена кинематическая схема курсовертикали, содержащая только те функциональные узлы, которые имеют отношение к решаемой задаче. На фиг.2 представлена блок-схема системы управления двигателем отработки креновой рамы. На фиг.1 - фиг.2 приняты следующие обозначения:
1 – гировертикаль (ГВ);
2 – гирополукомпас (ГПК);
3 – креновая рама;
4 – тангажная рама;
5 – гиромотор ГВ;
6 – наружная рама ГВ;
7 – внутренняя рама ГВ;
8 – датчик угла тангажа (синусно-косинусный трансформатор);
9 – датчик угла крена (синусно-косинусный трансформатор);
10 – индуктивный датчик;
11 – гиромотор ГПК;
12 – внутренняя рама ГПК;
13 – наружная рама ГПК;
14 – датчик угла курса (синусно-косинусный трансформатор);
15 – приемник угла тангажа (синусно-косинусный трансформатор);
16 – первый двигатель отработки (двигатель отработки креновой рамы);
17 – первый усилитель;
18 – второй усилитель;
19 – второй двигатель отработки (двигатель отработки тангажной рамы);
20 – датчик жидкостной маятниковый продольной коррекции;
21 – коррекционный мотор продольной коррекции;
22 – датчик жидкостной маятниковый поперечной коррекции;
23 – коррекционный мотор поперечной коррекции;
24 – датчик угла горизонтальной коррекции;
25 – коррекционный мотор горизонтальной коррекции;
26 – первый преобразователь аналог-код;
27 – второй преобразователь аналог-код;
28 – третий преобразователь аналог-код;
29 – четвертый преобразователь аналог-код;
30 – пятый преобразователь аналог-код;
31 – микроконтроллер;
32 – преобразователь код-аналог;
Буквенные обозначения:
 – угол тангажа на датчике 8;
– угол тангажа на датчике 8;
 угол тангажа на приемнике 15;
угол тангажа на приемнике 15;
 – кинетический момент ГВ;
– кинетический момент ГВ;
 – кинетический момент ГПК;
– кинетический момент ГПК;
 – напряжение индуктивного датчика;
– напряжение индуктивного датчика;
 – напряжение синусной обмотки датчика угла тангажа;
– напряжение синусной обмотки датчика угла тангажа;
 – напряжение косинусной обмотки датчика угла тангажа;
– напряжение косинусной обмотки датчика угла тангажа;
 – напряжение синусной обмотки датчика угла курса;
– напряжение синусной обмотки датчика угла курса;
 – напряжение косинусной обмотки датчика угла курса;
– напряжение косинусной обмотки датчика угла курса;
 напряжение на выходе преобразователя код-аналог (32);
напряжение на выходе преобразователя код-аналог (32);
 количество разрядов цифровых сигналов;
количество разрядов цифровых сигналов;
 – напряжение управления двигателя отработки креновой рамы;
– напряжение управления двигателя отработки креновой рамы;
 – напряжение управления двигателя отработки тангажной рамы;
– напряжение управления двигателя отработки тангажной рамы;
 – продольная ось самолета;
– продольная ось самолета;
 – местная вертикаль;
– местная вертикаль;
 ось подвеса внутренней рамы ГВ;
ось подвеса внутренней рамы ГВ;
 ось подвеса наружной рамы ГВ;
ось подвеса наружной рамы ГВ;
 ось подвеса внутренней рамы ГПК;
ось подвеса внутренней рамы ГПК;
 – ось подвеса наружной рамы ГПК;
– ось подвеса наружной рамы ГПК;
 ось подвеса креновой рамы;
ось подвеса креновой рамы;
 ось подвеса тангажной рамы;
ось подвеса тангажной рамы;
Описание устройства управления креновой рамой курсовертикали.
Устройство управления состоит из некоторых функциональных узлов гироскопического блока фиг.1 и регулятора рамы в виде блок-схемы электронного блока, представленного на фиг.2. При этом на фиг.1а представлен вид на курсовертикаль в плоскости совершения маневра по углу тангажа , а на фиг.1б представлен вид со стороны местной вертикали , показывающий те элементы, которые на фиг.1а показать нельзя, например, ориентацию вектора кинетического момента гирополукомпаса 2 в плоскости горизонта.
Гироскопический блок состоит из гировертикали (узел вертикали) 1, установленной полуосями наружной рамой 6 в креновую раму 3, которая своими полуосями установлена в корпус, и гирополукомпаса 2, установленного полуосями наружной рамы 13 в тангажную раму 4, которая в свою очередь своими полуосями установлена в креновую раму 3. У гировертикали 1 в наружную раму кинематически установлен гироузел, состоящий из внутренней рамки 7 и гиромотора 5, который создает кинетический момент  , направленный по местной вертикали . Управляет ориентацией кинетического момента система продольной коррекции, состоящая из датчика жидкостного маятникового 20, подключенного к коррекционному мотору 21, и система поперечной коррекции, состоящая из датчика жидкостного маятникового 22, подключенного к коррекционному мотору 23. Системы коррекции показаны на фиг.1б. Для измерения угла неперпендикулярности между плоскостью наружной рамы 6 и кинетическим моментом служит индуктивный датчик 10, установленный на полуоси подвеса внутренней рамы 7. Для измерения угла тангажа служит датчик угла тангажа 8. У гирополукомпаса 2 в наружную раму 13 кинематически полуосями установлена внутренняя рама 12 с гиромотором 11, кинетический момент которого ориентируется горизонтально с помощью системы горизонтальной коррекции, состоящей из датчика угла 24, подключенного к коррекционному мотору 25. Угол курса измеряет датчик курса 14, установленный на полуоси наружной рамы 13. Для устранения кардановой погрешности ось наружной рамы 13 ГПК установлена в кардановый подвес, образованный креновой 3 и тангажной 4 рамами. Управление тангажной рамой 4 осуществляется следящей системой (блок-схема приведена на рис. 1а), состоящей из датчика угла тангажа 8, приемника угла тангажа 15, второго усилителя 18; второго двигателя отработки 19, установленного на креновой раме 3 и кинематически соединенного с тангажной рамой 4.
, направленный по местной вертикали . Управляет ориентацией кинетического момента система продольной коррекции, состоящая из датчика жидкостного маятникового 20, подключенного к коррекционному мотору 21, и система поперечной коррекции, состоящая из датчика жидкостного маятникового 22, подключенного к коррекционному мотору 23. Системы коррекции показаны на фиг.1б. Для измерения угла неперпендикулярности между плоскостью наружной рамы 6 и кинетическим моментом служит индуктивный датчик 10, установленный на полуоси подвеса внутренней рамы 7. Для измерения угла тангажа служит датчик угла тангажа 8. У гирополукомпаса 2 в наружную раму 13 кинематически полуосями установлена внутренняя рама 12 с гиромотором 11, кинетический момент которого ориентируется горизонтально с помощью системы горизонтальной коррекции, состоящей из датчика угла 24, подключенного к коррекционному мотору 25. Угол курса измеряет датчик курса 14, установленный на полуоси наружной рамы 13. Для устранения кардановой погрешности ось наружной рамы 13 ГПК установлена в кардановый подвес, образованный креновой 3 и тангажной 4 рамами. Управление тангажной рамой 4 осуществляется следящей системой (блок-схема приведена на рис. 1а), состоящей из датчика угла тангажа 8, приемника угла тангажа 15, второго усилителя 18; второго двигателя отработки 19, установленного на креновой раме 3 и кинематически соединенного с тангажной рамой 4.
Силовое воздействие на креновую раму 3 оказывает первый двигатель отработки 16, подключенный к первому усилителю 17, а его управляющее напряжение  формируется в регуляторе рамы, блок-схема которого приведена на фиг. 2. К регулятору рамы, который представляет собой микроконтроллер 31, соответственно подключены: на первый порт через первый преобразователь аналог-код 26 индуктивный датчик 10; на второй порт через второй преобразователь аналог-код 27 синусная обмотка датчика угла тангажа 8; на третий порт через третий преобразователь аналог-код 28 косинусная обмотка датчика угла тангажа 8; на четвертый порт через четвертый преобразователь аналог-код 29 синусная обмотка датчика угла курса 14; на пятый порт через пятый преобразователь аналог-код 30 косинусная обмотка датчика угла курса 14. Выходной порт контроллера через преобразователь код-аналог 32 соединен с первым усилителем 17, который подключен на вход первого двигателя отработки 16. В принципе устройство управления креновой рамой курсовертикали представляет собой систему с переменной структурой, которая изменяется в зависимости от угла тангажа , обеспечивая при этом невыбиваемость гировертикали, компенсацию кардановой погрешности гирополукомпаса и выдачу точных сигналов по углам крена, тангажа и курса при произвольном маневрировании самолета в продольной плоскости.
формируется в регуляторе рамы, блок-схема которого приведена на фиг. 2. К регулятору рамы, который представляет собой микроконтроллер 31, соответственно подключены: на первый порт через первый преобразователь аналог-код 26 индуктивный датчик 10; на второй порт через второй преобразователь аналог-код 27 синусная обмотка датчика угла тангажа 8; на третий порт через третий преобразователь аналог-код 28 косинусная обмотка датчика угла тангажа 8; на четвертый порт через четвертый преобразователь аналог-код 29 синусная обмотка датчика угла курса 14; на пятый порт через пятый преобразователь аналог-код 30 косинусная обмотка датчика угла курса 14. Выходной порт контроллера через преобразователь код-аналог 32 соединен с первым усилителем 17, который подключен на вход первого двигателя отработки 16. В принципе устройство управления креновой рамой курсовертикали представляет собой систему с переменной структурой, которая изменяется в зависимости от угла тангажа , обеспечивая при этом невыбиваемость гировертикали, компенсацию кардановой погрешности гирополукомпаса и выдачу точных сигналов по углам крена, тангажа и курса при произвольном маневрировании самолета в продольной плоскости.
Напряжения, формируемые датчиками 10; 8 и 14 соответственно равны:





где  угол внутреннего крена,
угол внутреннего крена,  угол курса,
угол курса,  коэффициенты передачи в каналах датчиков 10, 8 и 14 соответственно.
коэффициенты передачи в каналах датчиков 10, 8 и 14 соответственно.
Напряжения  являются напряжениями переменного тока. Приведенные выше выражения отражают только амплитудные значения, которые и являются информативной частью сигналов.
являются напряжениями переменного тока. Приведенные выше выражения отражают только амплитудные значения, которые и являются информативной частью сигналов.
Работа устройства при выполнении самолетом неограниченных маневров в продольной плоскости.
Для пояснения работы устройства выделим характерные области изменения угла тангажа  , которые влияют на вид законов управления первым двигателем отработки.
, которые влияют на вид законов управления первым двигателем отработки.
Область 1.  .
.
Область 2.. 
Область 3. 
Область 4. 
В областях 1-2 достаточно использовать для управления первым двигателем сигнал индуктивного датчика 10 с коррекцией на угол тангажа.
В областях 3-4 необходимо произвести переключение управлением первым двигателем с индуктивного датчика 10 на датчик курса 14 с коррекцией на угол тангажа.
В прототипе курсовертикали в КВ-2Н принято, что  .
.
Последовательность работы регулятора рамы, выполненного в виде микроконтроллера, состоит из следующих этапов.
1. Опрос преобразователей аналог-код 26-30, которые формируют n – разрядные коды напряжений  и размещение их в ячейках памяти микроконтроллера, например,
и размещение их в ячейках памяти микроконтроллера, например,  , содержимое которых соответственно равно:
, содержимое которых соответственно равно: 
2. В соответствии с принятой информацией вычисление улов тангажа и курса с применением подпрограммы 

Для пояснения вычисленные значения углов тангажа и курса приведены с нижнем индексом «в».
3. Проверка условий по углу тангажа:
Если угол тангажа находится в первой области, то происходит запоминание угла курса  и формирование управляющего напряжения первым двигателем отработки 16, которое вычисляется по формуле
и формирование управляющего напряжения первым двигателем отработки 16, которое вычисляется по формуле  .
.
Введение множителя  делает закон управления первым двигателем отработки 16 по сигналу индуктивного датчика 10 инвариантным к углу тангажа, так как действительное значение угла тангажа
делает закон управления первым двигателем отработки 16 по сигналу индуктивного датчика 10 инвариантным к углу тангажа, так как действительное значение угла тангажа  и вычисленное
и вычисленное  практически совпадают.
практически совпадают.
Если условие первой области не выполняется, то программа переходит к проверке условия второй области. При его выполнении происходит запоминание угла курса  и формирование управляющего напряжения первым двигателем отработки 16, которое также вычисляется по формуле .
и формирование управляющего напряжения первым двигателем отработки 16, которое также вычисляется по формуле .
Если условия первой и второй областей не выполняются, то программа проверяет принадлежность угла тангажа к третьей области. При его выполнении происходит формирование управляющего напряжения первым двигателем отработки 16, которое вычисляется по формуле  .
.
Если условие принадлежности угла тангажа к третьей области не выполняются, то программа проверяет принадлежность угла тангажа к четвертой области. При его выполнении происходит формирование управляющего напряжения первым двигателем отработки 16, которое вычисляется по формуле  .
.
Если условие принадлежности угла тангажа к четвертой области не выполняются, то программа возвращается в начало проверки условий по углу тангажа.
4. В конечном счете, в регистр обмена микроконтроллера будет направлена величина, соответствующая выполнению условий из первой-второй областей или третьей-четвертой, что является окончанием работы программы в течение очередного цикла работы.
5. После завершения очередного цикла работы программа возвращается в начало к первому пункту для организации работы в реальном масштабе времени.
6. Преобразователь код-аналог 32, опрашивая регистр обмена микроконтроллера 31, преобразует цифровой эквивалент в аналоговое напряжение  , которое усиливаясь в первом усилителе 17,
, которое усиливаясь в первом усилителе 17,
 подается на первый двигатель отработки 16 для управления креновой рамой 3.
подается на первый двигатель отработки 16 для управления креновой рамой 3.
По сравнению с прототипом устройство управления креновой рамой курсовертикали будет более компактным, и занимать одну плату, а, следовательно, иметь меньший вес. Цифровой вычислитель на базе микроконтроллера не имеет погрешностей присущих электромеханическим вычислителям, и в частности температурных погрешностей.





Система контроля и управления медико-биологическими параметрами воздуха в стоматологической установке
Система воздушных сигналов вертолета
Способ получения охватывающего барьерного разряда и устройство для осуществления способа получения охватывающего барьерного разряда
Мобильная поверочная установка для счетчиков газораспределительных станций
Устройство для равномерного распределения потока
Способ одновременного измерения частоты, фазы, начальной фазы и амплитуды гармонического сигнала
Гироинерциальный модуль гироскопического инклинометра
Синхронный электродвигатель
Гироинерциальный модуль гироскопического инклинометра
Гиростабилизатор оптических элементов
Тренажер для изучения авиагоризонта
Система формирования выходного сигнала блоков демпфирующих гироскопов
Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости
Установка для снятия механических характеристик гиромотора
Одноосный силовой горизонтальный гиростабилизатор
Колесный датчик линейной скорости наземного транспортного средства

