Результат интеллектуальной деятельности: Колесный датчик линейной скорости наземного транспортного средства
Вид РИД
Изобретение
Изобретение относится к измерительной технике, в частности к измерителям линейной скорости, работающим на основе измерений акселерометров, и может быть использовано для измерения линейной скорости движения наземных транспортных средств.
Известен датчик линейной скорости (Плохоцкий, М.А. Машины и механизмы для путевого хозяйства. М.: Изд-во «Транспорт», – 1970 г. с. 260-261), который построен на измерении угловой скорости вращения колесной пары и который состоит тахогенератора, кинематически через редуктор соединенного с осью колесной пары.
Недостатком этого устройства является излишняя громоздкость, наличие редуктора и пониженная точность измерения скорости.
Известно устройство измерения линейной скорости подвижного объекта на основании измерения ускорений с последующим интегрированием, (Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем. СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ Электроприбор», 2009, стр. 20), взятое в качестве прототипа. Устройство состоит из двух акселерометров с взаимно перпендикулярными осями чувствительности и закрепленными жестко на подвижном объекте, которые подключены к блоку пересчета (микроконтроллеру), выход которого соединен с двумя последовательно соединенными интеграторами. Данная бесплатформенная инерциальная навигационная система относится к классу сложных навигационных систем и формирует много параметров движения кроме скоростей.
Однако в силу наличия операции интегрирования данная система будет иметь нарастающую со временем погрешность и для ее нормальной работы требуется периодическая коррекция.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в повышении точности измерения линейной скорости наземного транспортного средства за счет осреднения сигналов акселерометров посредством соответствующего их включения и исключения операции интегрирования в алгоритме определения скорости.
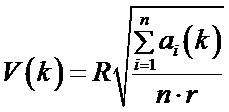
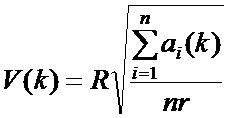
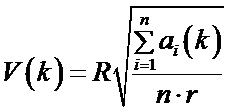
Технический результат достигается тем, что в колесном датчике линейной скорости наземного транспортного средства, содержащем акселерометры, жестко закрепленные на транспортном средстве, и микроконтроллер, новым является то, что акселерометры жестко закреплены на колесе транспортного средства и равномерно расположены по окружности с радиусом, определяемым используемыми акселерометрами, с осями чувствительности, ориентированными перпендикулярно к оси вращения колеса, при этом диаметрально расположенные акселерометры подключены к соответствующим входам сумматоров, выходы которых соединены с соответствующими входами преобразователей аналог-код, выходы которых подключены к соответствующим портам микроконтроллера, в котором линейная скорость определяется согласно формуле
 ,
,
где  – радиус колеса транспортного средства;
– радиус колеса транспортного средства;  – заданный радиус установки акселерометров на колесе;
– заданный радиус установки акселерометров на колесе;  (k) – ускорение, измеряемое
(k) – ускорение, измеряемое  -м акселерометром на
-м акселерометром на  -ом шаге работы микроконтроллера;
-ом шаге работы микроконтроллера;  – четное количество акселерометров,
– четное количество акселерометров,
при этом выходной порт микроконтроллера соединен с входом устройства беспроводной передачи информации, являющимся выходом колесного датчика линейной скорости транспортного средства.
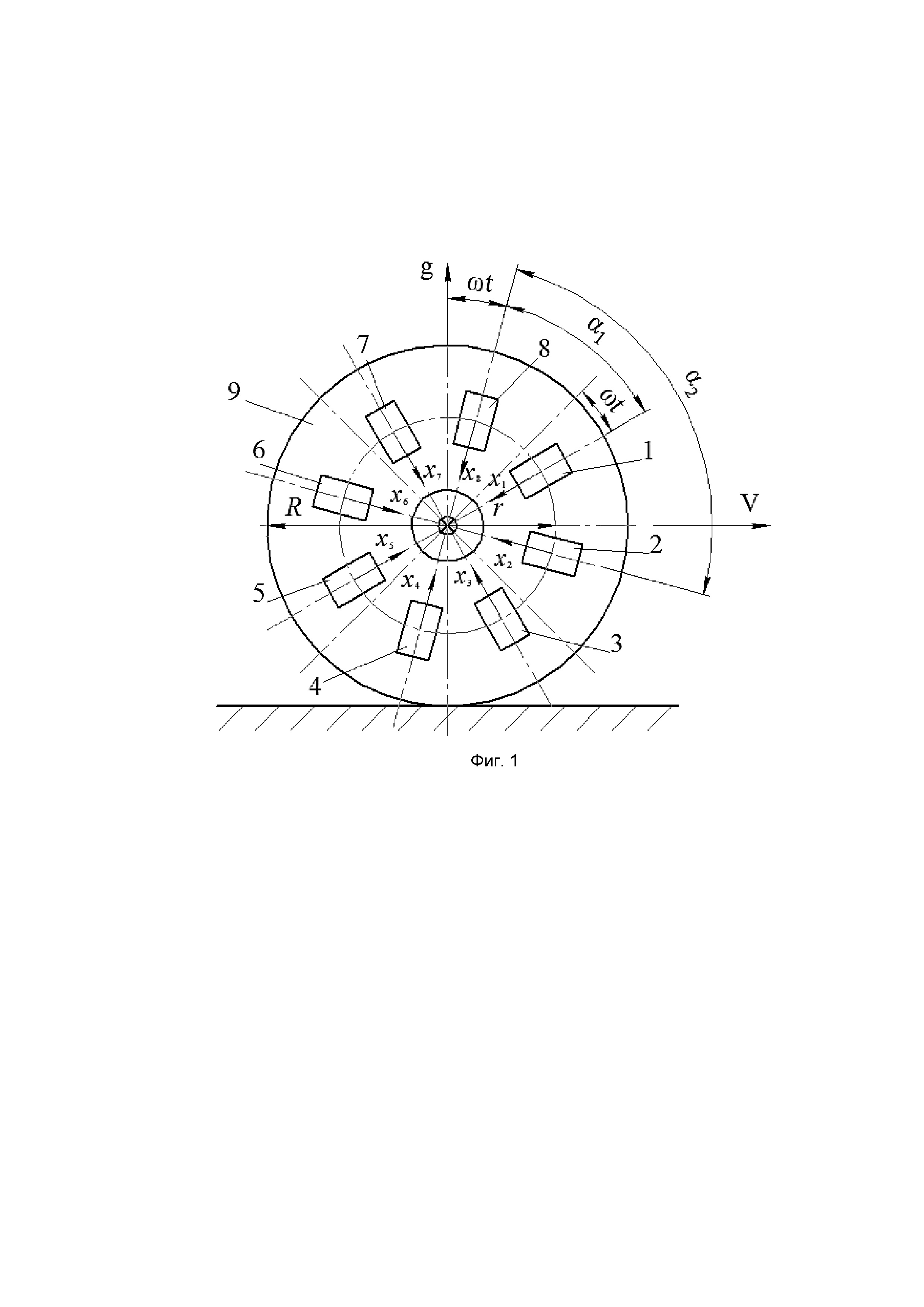
Сущность изобретения поясняется на фиг.1 и фиг.2, где фиг.1 – схема расположения акселерометров на колесе в текущий момент времени, фиг.2 – структурная схема колесного датчика линейной скорости. Здесь:
1 – 8 – акселерометры (для примера показано 8 акселерометров);
9 – колесо транспортного средства;
10 – 13 – сумматоры;
14 – 17 – преобразователи аналог-код (АЦП);
18 – 21 – входные порты микроконтроллера;
22 – микроконтроллер;
23– выходной порт микроконтроллера;
24 – устройство беспроводной передачи информации (Bluetooth);
 – линейная скорость транспортного средства;
– линейная скорость транспортного средства;
 – угловая скорость колеса;
– угловая скорость колеса;
 – оси чувствительности акселерометров (для примера показано 8 акселерометров);
– оси чувствительности акселерометров (для примера показано 8 акселерометров);
 – местная вертикаль;
– местная вертикаль;
 – углы установки акселерометров на колесе, (
– углы установки акселерометров на колесе, ( );
);
 – ускорение силы тяжести;
– ускорение силы тяжести;
 – ускорения, измеряемые акселерометрами, ();
– ускорения, измеряемые акселерометрами, ();
 ,
,  ,
,  ,
,  – обозначение суммарных сигналов диаметрально расположенных акселерометров.
– обозначение суммарных сигналов диаметрально расположенных акселерометров.
Колесный датчик линейной скорости включает в себя  акселерометров (для примера показано 8 акселерометров 1–8), вмонтированных в колесо транспортного средства (автомобиль, путеизмеритель и др.) и равномерно расположенных по окружности радиусом r с осями чувствительности, ориентированными перпендикулярно к оси вращения колеса. Количество акселерометров – четное число, что необходимо для исключения из показаний акселерометров проекций ускорения силы тяжести на ось чувствительности акселерометра для упрощения алгоритма вычисления линейной скорости. Для исключения влияния ускорения силы тяжести на работу колесного датчика сигналы диаметрально установленных акселерометров 1 и 5, 2 и 6, 3 и 7, 4 и 8 суммируются на соответствующих сумматорах 10-13, выходы которых соединены с соответствующими входами преобразователей аналог-код 14-17, выходы которых подключены к соответствующим входным портам 18-21 микроконтроллера 22. А выходной порт 23 микроконтроллера соединен со входом устройства беспроводной передачи информации 24, выход которого является выходом колесного датчика линейной скорости.
акселерометров (для примера показано 8 акселерометров 1–8), вмонтированных в колесо транспортного средства (автомобиль, путеизмеритель и др.) и равномерно расположенных по окружности радиусом r с осями чувствительности, ориентированными перпендикулярно к оси вращения колеса. Количество акселерометров – четное число, что необходимо для исключения из показаний акселерометров проекций ускорения силы тяжести на ось чувствительности акселерометра для упрощения алгоритма вычисления линейной скорости. Для исключения влияния ускорения силы тяжести на работу колесного датчика сигналы диаметрально установленных акселерометров 1 и 5, 2 и 6, 3 и 7, 4 и 8 суммируются на соответствующих сумматорах 10-13, выходы которых соединены с соответствующими входами преобразователей аналог-код 14-17, выходы которых подключены к соответствующим входным портам 18-21 микроконтроллера 22. А выходной порт 23 микроконтроллера соединен со входом устройства беспроводной передачи информации 24, выход которого является выходом колесного датчика линейной скорости.
При движении транспортного средства с линейной скоростью V, колесо 9 вращается с угловой скоростью  , которая создает центростремительное ускорение
, которая создает центростремительное ускорение  . При этом каждый акселерометр будет измерять сумму центростремительного ускорения и проекцию ускорения силы тяжести g на свою ось чувствительности
. При этом каждый акселерометр будет измерять сумму центростремительного ускорения и проекцию ускорения силы тяжести g на свою ось чувствительности  .
.
Для исключения влияния ускорения силы тяжести оси чувствительности акселерометров ориентированы перпендикулярно оси вращения колеса и сигналы диаметрально расположенных акселерометров суммируются. Рассмотрим для примера формирование сигнала с акселерометров 1 и 5 на сумматоре 10
 ;
;
 ;
;
 .
.
Аналогично будет формироваться сумма для двух любых диаметрально расположенных акселерометров
 .
.
Полученные суммы сигналов с сумматоров 10-13 поступают на входы преобразователей аналог-код 14-17 и далее через входные порты 18-21 в микроконтроллер 22, в котором из уравнения
определяется линейная скорость  с учетом формирования ее на каждом шаге k опроса
с учетом формирования ее на каждом шаге k опроса
 .
.
Вычисленная в микроконтроллере 22 линейная скорость транспортного средства через выходной порт 23 с помощью беспроводного устройства передачи информации (например, Bluetooth) 24 передается потребителям.
Работа колесного датчика линейной скорости была апробирована на примере движения железнодорожного путеизмерителя с помощью компьютерной модели, выполненной в Simulink прикладного пакета MatLab. Для модели использовались следующие характеристики:
Скорость путеизмерителя: V=60км/час=16,7 м/с.
Радиус колеса: R=0,475 м.
Радиус установки акселерометров: r=0,3м.
Центростремительное ускорение:  .
.
Шаг опроса по времени:  .
.
Результаты моделирования приведены на фиг.3, где горизонтальной осью является время t, с; а вертикальной осью – линейная скорость путеизмерителя V, м/с.
По приведенному графику видно, что смоделированная скорость имеет такое же значение, как заданная скорость путеизмерителя (V= 60км/час =16,7 м/с), но с колебаниями этого значения в пределах от -0,0278 до +0,0317 м/с. Эти колебания вызваны неточностью установки акселерометров на колесе и погрешностью работы самих акселерометров, которые были заданы в виде случайных процессов в определенном диапазоне: для первого, второго, пятого и седьмого акселерометров погрешность составляет ±0,1%, для третьего и четвертого – ±0,05%, для шестого и восьмого – ±0,08%. Таким образом, точность колесного датчика линейной скорости будет равна 0,2% или ±0,032 м/с. Погрешность же можно осреднить с помощью апериодических фильтров, включенных, например, на выходах сумматоров.
В рамках апробации разработан эскиз конструкции для железнодорожного колеса, полностью герметичный. Питание от аккумулятора емкостью 6 Ачас (при работе в течение 4-х часов), напряжением ± 15В. Акселерометр АТ1104-50. Разъем для зарядки аккумулятора герметичный. Включение-выключение системы дистанционное, беспроводное.
Таким образом, предложенное изобретение – колесный датчик линейной скорости – технически реализуем и работоспособен, а прошедшая апробацию моделированием работоспособность показывает, что в используемом схемном решении нет накапливаемой со временем погрешности в результате осреднения сигналов акселерометров за счет соответствующего их включения и исключения операции интегрирования в алгоритме определения скорости.












Двухканальный датчик угловой скорости
Тренажер для изучения гирополукомпаса
Устройство управления креновой рамой курсовертикали
Устройство создания нагрузочного момента двигателя постоянного тока
Способ определения параметров моментного двигателя постоянного тока

