Результат интеллектуальной деятельности: Способ определения местоположения приёмника сигналов авиационных телекоммуникационных систем
Вид РИД
Изобретение
Изобретение относится к области радиотехнических систем и может быть использовано, например, для пассивного определения местоположения приемника сигналов авиационных телекоммуникационных систем на основе обработки этих сигналов.
Известен разностно-дальномерный способ определения местоположения объекта - источника радиоизлучения (ИРИ) (1 - Клименко Н.Н., Клименко С.В. Современное состояние теории и практики радиоинтерферометрии // Зарубежная радиоэлектроника, 1990. - №1. - С. 3-14), (2 - Патент РФ №2204145, МПК: (2006.01) G01S 3/46. Разностно-дальномерный способ пеленгования - источника радиоизлучения, Военный инженерно-космический университет. Сайбель А.Г. Публ. - 10.05.2003 г.); (3 - Патент РФ №2521084, МПК: (2006.01) G01S 3/46. Разностно-дальномерный способ определения координат источника радиоизлучения, ООО НПП «Новые Технологии Телекоммуникаций». Овчаренко Л.А., Панков А.В., Погорелов В.А., Потапов С.Г., Тимофеев С.С., Шуст М.П. Публ. - 27.06.2014 г.). Он заключается в приеме сигналов этого ИРИ несколькими взаимосвязанными измерительными пунктами с известными координатами, вычислении задержки времени прихода сигналов для каждой пары измерительных пунктов, формировании гиперболоида, на основе которого определяют угловое положение ИРИ.
Недостатком способа является необходимость использования не менее трех измерительных пунктов и системы связи между ними. При этом все измерения должны производиться синхронно, что влечет необходимость применения сложной системы единого времени и, следовательно, усложняет техническую реализацию. Кроме того с точки зрения объекта, координаты которого требуется определить, этот способ является активным, т.к. объект должен быть источником радиоизлучения.
Известен способ определения местоположения объекта, реализованный в навигационной аппаратуре потребителя (НАП) глобальных навигационных спутниковых систем (ГНСС) на основе приема сигналов навигационных спутников разнесенных источников навигационных сигналов (4 - ГОСТ Р 52928-2010. Система спутниковая навигационная глобальная. Термины и определения. - М.: Стандартинформ, 2011. - 16 с.), (5 - Тяпкин В.Н., Гарин Е.Н. Методы определения навигационных параметров подвижных средств с использованием спутниковой радионавигационной системы ГЛОНАСС: монография. - Красноярск: СФУ, 2012. - 260 с.). Для его реализации координаты источников должны быть известны НАП, источники должны иметь высокоточную систему единого времени. Т.е. все измерения должны производиться синхронно, что влечет необходимость применения сложной системы единого времени и, следовательно, усложняет техническую реализацию.
Известен способ определения местоположения объекта, реализованный на основе приема навигационных сигналов разнесенных ИРИ. Способ реализован, например, в таких радионавигационных системах как «Чайка» (6 - ГОСТ Р 54025-2010. Система радионавигационная «Чайка». Приемные устройств. Требования к техническим характеристикам. Методы испытаний и требуемые результаты. - М.: Стандартинформ, 2011. - 20 с.) и (7 - Быков В.И., Никитенко Ю.И. Импульсно-фазовая радионавигационная система «Лоран-С». - М.: Транспорт, 2067. - 95 с.). Способ позволяет определить местоположение объекта - приемника сигналов радионавигационных систем. При этом такая радионавигационная система должна быть реализована, а все измерения должны производиться синхронно, что влечет необходимость применения сложной системы единого времени и, следовательно, усложняет техническую реализацию.
Известен способ определения местоположения источника радиоизлучения с периодической структурой сигнала и вращающейся направленной антенной (8 - Патент РФ №2670976, МПК: (2006.01) G01S 5/10. Способ определения местоположения источника радиоизлучения с периодической структурой сигнала и вращающейся направленной антенной, Российская Федерация, от имени которой выступает Министерство обороны Российской Федерации. Ломанцова Ю.А., Морозов А.П., Строцев А.А., Щегров А.А. Публ. - 26.10.2018 г.), принятый за прототип. Он реализуется в виде следующей последовательности операций: на пункте приема (ПП) с известными координатами принимают сигналы ИРИ от N' одновременно облучаемых ретрансляторов с известными координатами, последовательно принимают сигналы ИРИ от N'' последовательно облучаемых ретрансляторов с известными координатами, определяют характеристики ИРИ: структуру сигнала для одного периода излучения и период вращения направленной антенны, выбирают «опорный» ретранслятор из числа всех ретрансляторов, экстраполируют сигналы, принятые от «опорного» ретранслятора на основе данных о структуре сигнала для одного периода излучения и периоде вращения направленной антенны, измеряют первичные пространственно-информационные параметры (ППИП) первой группы, представляющие задержки времени между принятыми сигналами «опорного» ретранслятора и оставшимися одновременно облучаемыми ретрансляторами, измеряют ППИП второй группы, представляющие задержки времени между экстраполированными сигналами «опорного» ретранслятора и принятыми сигналами последовательно облучаемых ретрансляторов, измеряют ППИП третьей группы, представляющие длительности интервалов времени между моментом положения вращающейся направленной антенны ИРИ, соответствующего направлению главного лепестка ее диаграммы направленности на «опорный» ретранслятор, и моментом положения вращающейся направленной антенны ИРИ, соответствующего направлению главного лепестка ее диаграммы направленности на оставшиеся последовательно облучаемые ретрансляторы, формируют по измеренным ППИП соответствующие первичные координаты первой группы - разности расстояний между ИРИ и «опорным» ретранслятором и между ИРИ и каждым одновременно облучаемым ретранслятором, формируют по измеренным ППИП соответствующие первичные координаты второй группы - разности расстояний между ИРИ и «опорным» ретранслятором и между ИРИ и каждым оставшимся последовательно облучаемым ретранслятором, формируют по измеренным ППИП соответствующие первичные координаты третьей группы - азимутальные углы визирования в плоскости местного горизонта топоцентрической системы координат, связанной с точкой местоположения источника радиоизлучения, пары объектов, составленной из «опорного» ретранслятора и каждого оставшегося последовательно облучаемого ретранслятора, формируют для каждой из трех групп первичных координат соответствующие три группы поверхностей положения, формируют возможные группы линий положения как геометрическое место точек пересечения поверхностей положения соответствующих групп с поверхностью Земли, определяют местоположение ИРИ с периодической структурой сигнала и вращающейся направленной антенной: если N'≥3, при дополнительном условии N''<1 - на основе пересечений линий положения первой группы, если N'≥2 и N''≥1 - на основе пересечений линий положения первой, второй и третьей групп, если N'<2 и N''≥3 - на основе пересечений линий положения второй и третьей групп, если N'≤2 и N''<1 или если N'<2 и N''≤2 - пересечение линий положения не формируют и местоположение ИРИ не определяют.
Способ обеспечивает определение местоположения источника радиоизлучения с периодической структурой сигнала и вращающейся направленной антенной на основе приема сигналов авиационных телекоммуникационных систем без развертывания многопозиционной радионавигационной системы со сложной подсистемой единого времени.
Недостатком способа-прототипа является невозможность определения местоположения ПП - приемника сигналов авиационных телекоммуникационных систем.
Технической проблемой является расширение арсенала технических средств определения местоположения ПП - приемника сигналов авиационных телекоммуникационных систем, отличающихся простой реализацией без развертывания многопозиционной радионавигационной системы со сложной подсистемой единого времени.
Для решения данной технической проблемы предлагается способ определения местоположения приемника сигналов авиационных телекоммуникационных систем, для реализации которого определяют характеристики ИРИ: структуру сигнала для одного периода излучения и период вращения направленной антенны, выбирают «опорный» ретранслятор из числа всех ретрансляторов, экстраполируют сигналы, принятые от «опорного» ретранслятора на основе данных о структуре сигнала для одного периода излучения и периоде вращения направленной антенны, измеряют ППИП, представляющие задержки времени между экстраполированными сигналами «опорного» ретранслятора и принятыми сигналами оставшихся последовательно облучаемых ретрансляторов, формируют для первичных координат соответствующие поверхности положения, формируют возможные группы линий положения как геометрическое место точек пересечения поверхностей положения соответствующих групп с поверхностью Земли.
Согласно изобретению, дополнительно до определения характеристик ИРИ на ПП с неизвестными координатами последовательно принимают сигналы от N'' последовательно облучаемых ретрансляторов - приемоответчиков авиационных телекоммуникационных систем, инициируемых ИРИ с периодической структурой сигнала и вращающейся направленной антенной - запросчиком авиационных телекоммуникационных систем с известными координатами, одновременно принимают и обрабатывают сигналы приемоответчиков авиационных телекоммуникационных систем, содержащие информацию об их местоположении, после измерения ППИП формируют по измеренным ППИП соответствующие первичные координаты - разности расстояний между ПП и «опорным» ретранслятором и между ПП и каждым оставшимся последовательно облучаемым ретранслятором, а после формирования возможных групп линий положения определяют местоположение ПП - приемника сигналов авиационных телекоммуникационных систем.
Техническим результатом является возможность определения местоположения приемника радиосигналов на основе приема и обработки им сигналов приемоответчиков авиационных телекоммуникационных систем, расположенных на воздушных судах.
Указанный технический результат достигают за счет введения новых операций: последовательного приема сигналов на ПП с неизвестными координатами от N'' последовательно облучаемых ретрансляторов - приемоответчиков авиационных телекоммуникационных систем, инициируемых ИРИ с периодической структурой сигнала и вращающейся направленной антенной - запросчиком авиационных телекоммуникационных систем с известными координатами, одновременного приема и обработки сигналов приемоответчиков авиационных телекоммуникационных систем, содержащих информацию об их местоположении, выполняемых до определения характеристик ИРИ, формирования по измеренным ППИП соответствующих первичных координат - разностей расстояний между ПП и «опорным» ретранслятором и между ПП и каждым оставшимся последовательно облучаемым ретранслятором, выполняемого после измерения ППИП, а также определения местоположения ПП - приемника сигналов авиационных телекоммуникационных систем, выполняемого после формирования возможных групп линий положения.
На фиг. приведена структурная схема устройства, реализующего предлагаемый способ определения местоположения приемника сигналов авиационных телекоммуникационных систем.
Сочетание отличительных признаков и свойств предлагаемого способа из литературы не известны, поэтому он соответствует критериям новизны и изобретательского уровня.
Способ определения местоположения приемника сигналов авиационных телекоммуникационных систем реализуется следующим образом:
1. На ПП с неизвестными координатами последовательно принимают сигналы от N'' последовательно облучаемых ретрансляторов - приемоответчиков авиационных телекоммуникационных систем, инициируемых ИРИ с периодической структурой сигнала и вращающейся направленной антенной - запросчиком авиационных телекоммуникационных систем с известными координатами.
2. Одновременно принимают и обрабатывают сигналы приемоответчиков авиационных телекоммуникационных систем, содержащие информацию об их местоположении.
3. Определяют характеристики ИРИ: структуру сигнала для одного периода излучения и период вращения направленной антенны.
4. Выбирают «опорный» ретранслятор из числа всех ретрансляторов.
5. Экстраполируют сигналы, принятые от «опорного» ретранслятора на основе данных о структуре сигнала для одного периода излучения и периоде вращения направленной антенны.
6. Измеряют ППИП, представляющие задержки времени между экстраполированными сигналами «опорного» ретранслятора и принятыми сигналами оставшихся последовательно облучаемых ретрансляторов.
7. Формируют по измеренным ППИП соответствующие первичные координаты - разности расстояний между ПП и «опорным» ретранслятором и между ПП и каждым оставшимся последовательно облучаемым ретранслятором.
8. Формируют для первичных координат соответствующие поверхности положения.
9. Формируют возможные группы линий положения как геометрическое место точек пересечения поверхностей положения соответствующих групп с поверхностью Земли.
10. Определяют местоположение ПП - приемника сигналов авиационных телекоммуникационных систем.
Для реализации пункта 1 на ПП, координаты которого неизвестны и требуется определить, например, в геоцентрической прямоугольной экваториальной системе координат (ГПЭСК)
 ,
,
где T - знак операции транспонирования,
посредством приемника сигналов авиационных телекоммуникационных систем принимают сигналы последовательно облучаемых ретрансляторов Sk,  , где k - индекс ретранслятора, выбранный из группы последовательно облучаемых ретрансляторов, а N'' - количество последовательно облучаемых ретрансляторов, отвечающих выбранному ИРИ с периодической структурой и вращающейся направленной антенной.
, где k - индекс ретранслятора, выбранный из группы последовательно облучаемых ретрансляторов, а N'' - количество последовательно облучаемых ретрансляторов, отвечающих выбранному ИРИ с периодической структурой и вращающейся направленной антенной.
При этом в качестве ретрансляторов рассматриваются - приемоответчики авиационных телекоммуникационных систем. Их сигналы-ответы инициируются ИРИ с периодической структурой сигнала и вращающейся направленной антенной, т.е. радиолокационным запросчиком (РЛЗ) авиационных телекоммуникационных систем с известными координатами. Таким РЛЗ может быть вторичный обзорный радиолокатор (9 - Руководство по вторичным обзорным радиолокационным (ВОРЛ) системам. Doc 9684. Международная организация гражданской авиации, 2004. - 257 с.). РЛЗ формирует запросную последовательность некоторой длительности, которая циклически повторяется, а его вращающаяся антенна с узкой диаграммой направленности в азимутальной плоскости излучает эту последовательность, обеспечивая пространственную селекцию. Отдельные запросы в запросной последовательности имеют содержательный смысл. Например, запрос в режиме «А» системы ВОРЛ (10 - Приложение 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь. Том IV. ИКАО, 2014. - 318 с.) подразумевает получение в качестве ответа кода опознавания воздушного судна, а в режиме «С» - его барометрической высоты. Поскольку рассматриваемые РЛЗ входят в состав систем управления воздушным движением и являются стационарными сооружениями, то их координаты известны. Эти координаты могут быть представлены в ГПЭСК:

Для реализации пункта 2 одновременно с приемом сигналов приемоответчиков, инициализированных запросами РЛЗ в режимах «А» и «С», принимают и обрабатывают сигналы приемоответчиков авиационных телекоммуникационных систем, содержащие информацию об их местоположении. К таким сигналам относятся сигналы приемоответчиков режима «S» (11 - Технические положения, касающиеся услуг режима S и расширенного сквиттера. Doc 9871. Международная организация гражданской авиации, 2008. - 245 с.), обработка которых позволяет выделить широту  долготу
долготу  и высоту
и высоту  воздушного судна с приемоответчиком. Эти координаты преобразуются в координаты ГПЭСК, например, по (12 - ГОСТ 32453-2017. Глобальная навигационная спутниковая система. Системы координат. Методы преобразования координат определяемых точек. М.: Стандартинформ, 2017. - 23 с.):
воздушного судна с приемоответчиком. Эти координаты преобразуются в координаты ГПЭСК, например, по (12 - ГОСТ 32453-2017. Глобальная навигационная спутниковая система. Системы координат. Методы преобразования координат определяемых точек. М.: Стандартинформ, 2017. - 23 с.):

Для реализации пункта 3 определяют характеристики ИРИ: структуру его сигнала для одного периода излучения и период вращения направленной антенны Твр. Для этого используют принятые сигналы ретрансляторов - ответы приемоответчиков на запросы РЛЗ в режимах А» и «С». В частности, для анализа структуры сигнала определяются последовательности информационных элементов в сигналах, полученных за время облучения ретранслятора ИРИ. Структура сигнала ИРИ определяется посредством накопления статистических данных, например, в соответствии с (13 - патент РФ №2504797, МПК: (2006.01) G01S 5/00. Способ определения координат воздушных объектов при пассивной бистатической радиолокации, Министерство обороны Российской Федерации. Верещагина Г.Н., Жихарев Д.С., Козьев В.О. Публ. - 20.01.2014, бюл. №2.). После идентификации структуры сигнала ИРИ выполняется его сравнение с сигналами ИРИ, принятыми от ретрансляторов и определяется период вращения направленной антенны, например, по выражению, представленному в (13, с. 7, выражение (14)).
Для реализации пункта 4 выбирают «опорный» ретранслятор  например, по следующему правилу:
например, по следующему правилу:
Для реализации пункта 5 сигналы «опорного» ретранслятора Sопор экстраполируются на основе данных о периоде излучения, структуре сигнала ИРИ и периоде вращения его направленной антенны для каждого последовательно облученного ретранслятора - приемоответчика авиационных телекоммуникационных систем в соответствии с процедурой, описанной, например, в (4).
Для реализации пункта 6 измеряют ППИП, которые представляют собой задержки времени λk между экстраполированным временем приема сигнала «опорного» Sопор и моментами времени приема сигналов каждого из группы последовательно облучаемых ретрансляторов Sk,  если в качестве Sопор выбирается ретранслятор S1.
если в качестве Sопор выбирается ретранслятор S1.
Для реализации пункта 7 по измеренным ППИП формируют первичные координаты

где  если в качестве Sопор выбирается ретранслятор S1;
если в качестве Sопор выбирается ретранслятор S1;
ξk - разность расстояний между ПП и «опорным» ретранслятором Sопор и между ПП и ретранслятором Sk из группы последовательно облучаемых ретрансляторов;
 если в качестве Sопор выбирается ретранслятор S1;
если в качестве Sопор выбирается ретранслятор S1;
 - расстояние между РЛЗ и каждым ретранслятором.
- расстояние между РЛЗ и каждым ретранслятором.
Для реализации пункта 8 формируют для первичных координат {ξk}, { } - обозначение множества, соответствующие поверхности положения {Lk}.
При этом каждая поверхность положения из {Lk} является гиперболоидом с фокусами в точках ςопор и ςk, т.е. в точках местоположения «опорного» ретранслятора Sопор и соответствующего ретранслятора Sk. Для каждой точки поверхности Lk разность расстояний между ней и ретранслятором Sопор и между этой точкой и ретранслятором Sk, равна ξk. В параметрическом виде в соответствии с (14, с. 37 - Розендорн Э.Р. Теория поверхностей. - 2-е изд., перераб. и доп. - М.: ФИЗМАТЛИТ, 2006. - 304 с.) каждую поверхность положения Lk можно представить в виде
где ϕ, θ - криволинейные координаты на поверхности Lk, град;
Mz, My - матрицы поворота для ГПЭСК, углы поворота которых определяются относительно оси ОХ ГПЭСК вектором ςопор-ςk, если λk<0, или вектором ςk-ςопор, если λk>0.
Пункт 9 можно реализовать, например, путем составления и нахождения общего решения системы двух уравнений с тремя неизвестными или численно на основе параметрического представления поверхностей положения {Lk} и нахождения криволинейных координат на них, при которых для точки с координатами (X Y Z)T выполняется равенство

где аэл, bэл - полуоси эллипсоида в ГПЭСК.
Таким образом, линии положения можно представить в виде:

где  если в качестве Sопор выбирается ретранслятор S1,
если в качестве Sопор выбирается ретранслятор S1,
где Взем, Lзем, Нзем - широта, долгота и высота в выбранной системе координат;
 - радиус кривизны нормального сечения эллипсоида в плоскости первого вертикала;
- радиус кривизны нормального сечения эллипсоида в плоскости первого вертикала;
е2=α(2-α) - квадрат первого эксцентриситета меридианного эллипса;
α - полярное сжатие земного эллипсоида (15, с. 13 - Машимов М.М. Теоретическая геодезия. - М.: Недра, 1991. - 268 с.).
Для реализации пункта 10 определение местоположения ПП - приемника сигналов авиационных телекоммуникационных систем получают возможные для значений N'' оценки местоположения вида:

где  и
и  если в качестве Sопор выбирается ретранслятор S1.
если в качестве Sопор выбирается ретранслятор S1.
Совокупность полученных точечных единственных оценок нумеруется ρ=1, 2, …, Р:  и может быть использована для применения статистических методов с целью повышения точности итоговой оценки местоположения ПП, например, путем усреднения:
и может быть использована для применения статистических методов с целью повышения точности итоговой оценки местоположения ПП, например, путем усреднения:
или на основе реализации процедур оценивания координат по методу наименьших квадратов (16, с. 185 - Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. - М.: Радио и связь, 1986. - 264 с.), при этом группирование измерений по комплексам условий методом наименьших квадратов позволяет соотнести положение ПП точке, равноудаленной от точек пересечения всех поверхностей положения.
Таким образом, предлагаемый способ имеет следующие отличительные признаки в последовательности его реализации от способа-прототипа, которые представлены в таблице 1.
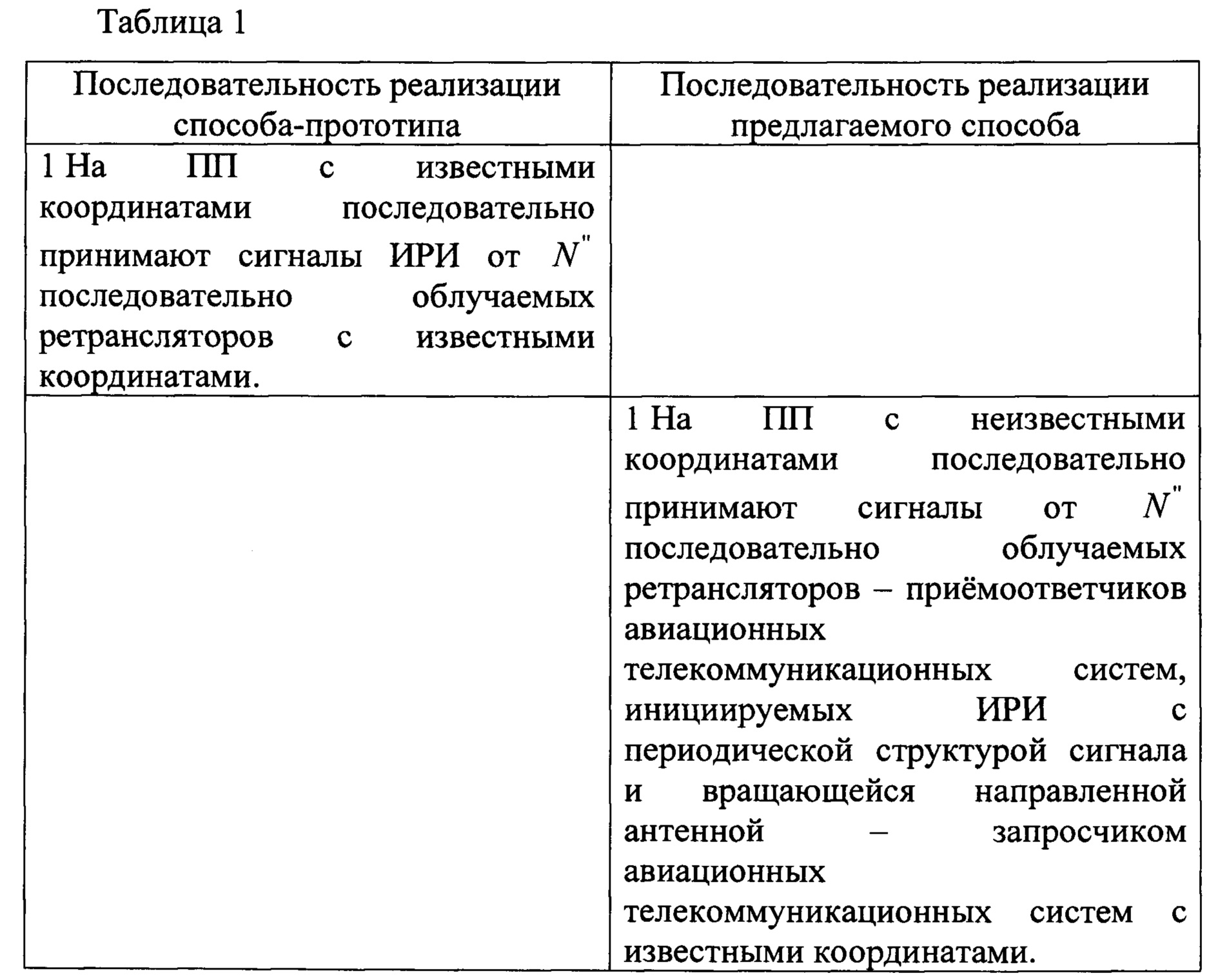
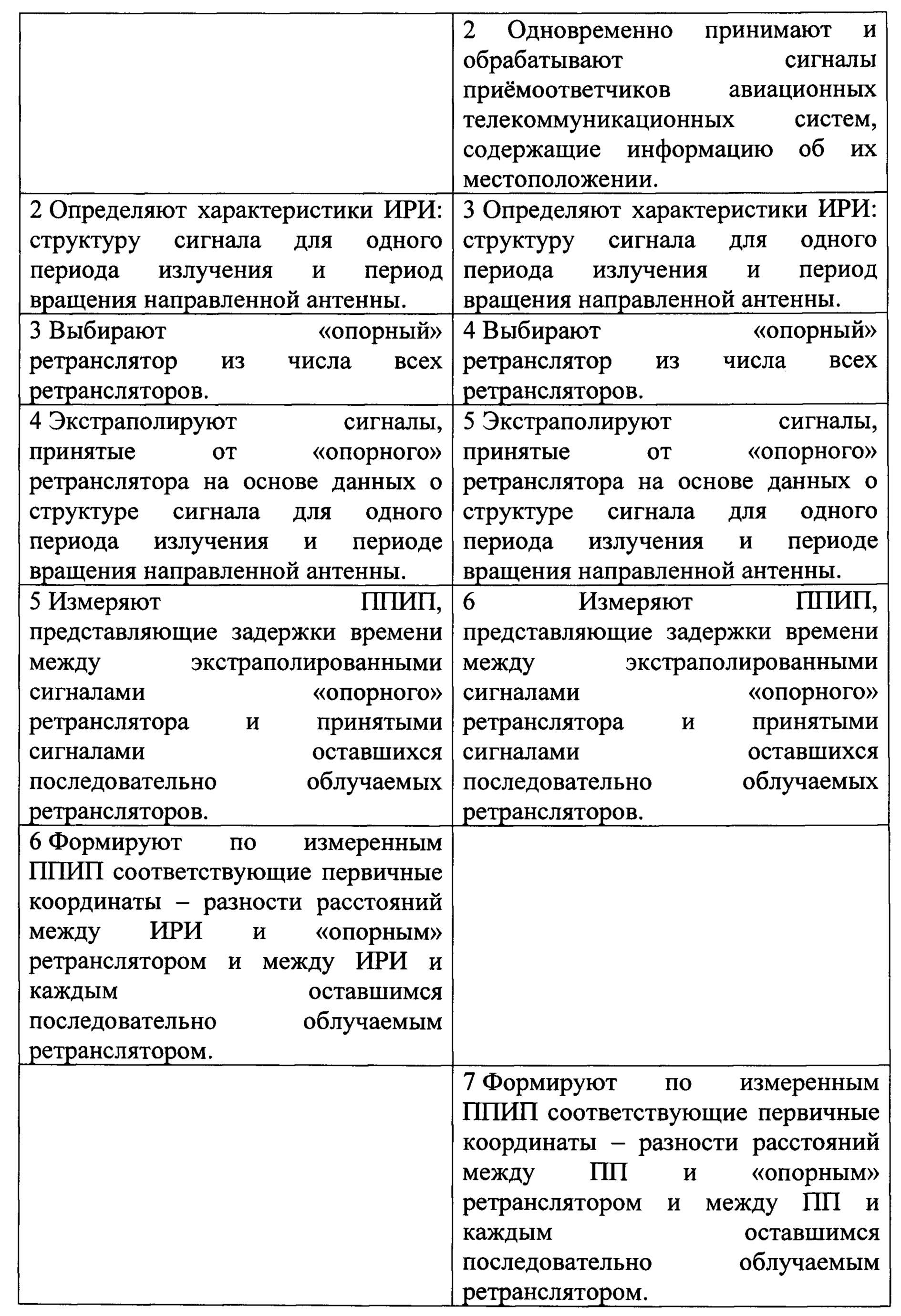
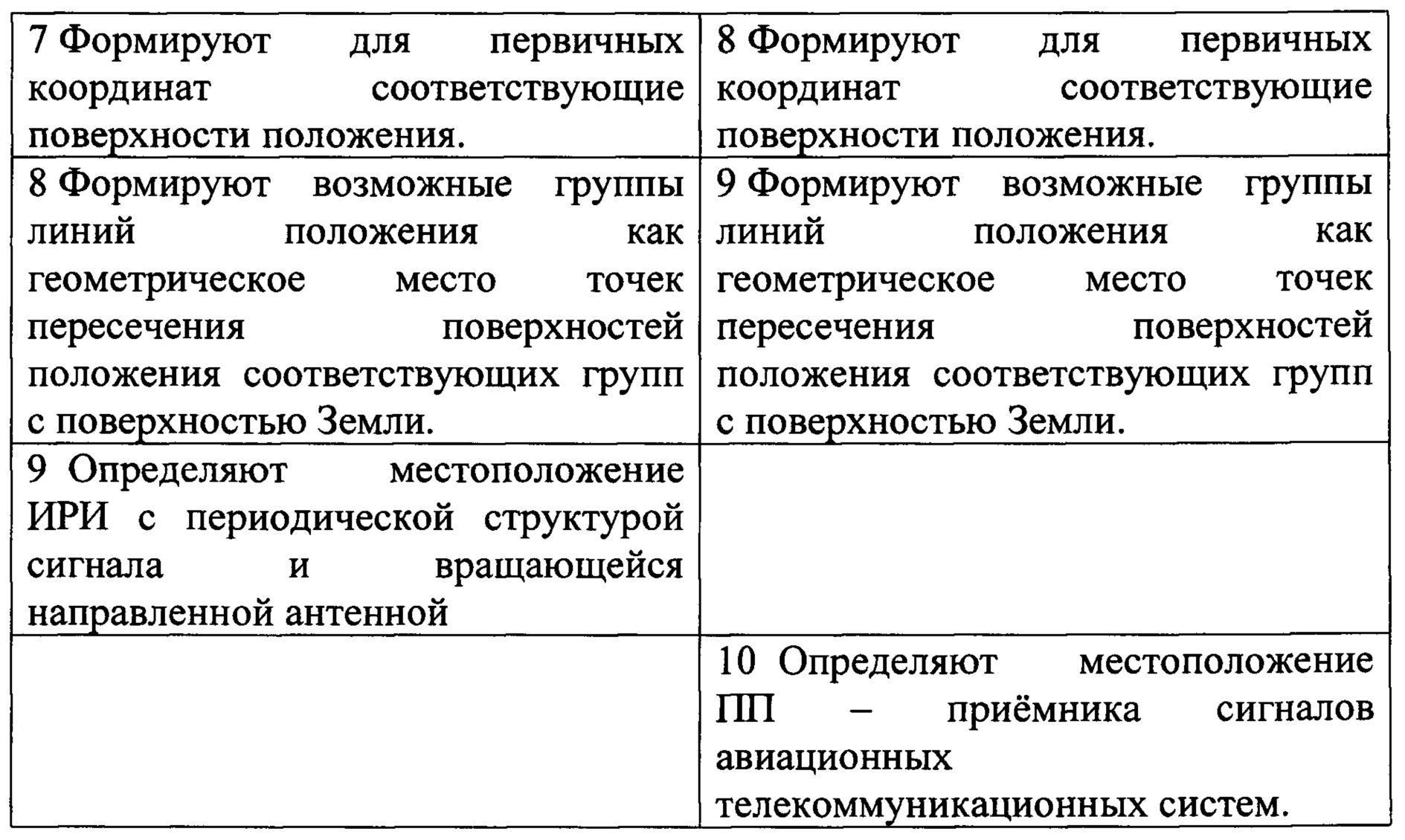
Из представленной таблицы 1 сравнения последовательностей реализации способа-прототипа и предлагаемого способа видно, что в предлагаемом способе относительно способа-прототипа дополнительно на ПП с неизвестными координатами последовательно принимают сигналы от N'' последовательно облучаемых ретрансляторов - приемоответчиков авиационных телекоммуникационных систем, инициируемых ИРИ с периодической структурой сигнала и вращающейся направленной антенной - запросчиком авиационных телекоммуникационных систем с известными координатами, одновременно принимают и обрабатывают сигналы приемоответчиков авиационных телекоммуникационных систем, содержащие информацию об их местоположении, формируют по измеренным ППИП соответствующие первичные координаты - разности расстояний между ПП и «опорным» ретранслятором и между ПП и каждым оставшимся последовательно облучаемым ретранслятором, определяют местоположение ПП - приемника сигналов авиационных телекоммуникационных систем.
Структурная схема устройства, реализующего предлагаемый способ, изображена на фигуре. В состав устройства входят:
01 - антенная система (АС);
02 - радиоприемное устройство (РПУ);
03 - устройство регистрации сигналов (УРС);
04 - декодер сигналов (ДС);
05 - блок оценки времени принятых сигналов (БОВПС);
06 - блок оценки структуры сигнала (БОСС);
07 - запоминающее устройство (ЗУ);
08 - вычислительное устройство (ВУ);
09 - блок индикации (БИ).
Выход АС 01 соединен с входом РПУ 02. Выход РПУ 02 соединен с входом УРС 03, выход которого последовательно соединен с входом ДС 04. Выход ДС 04 соединен с первыми входами БОВПС 05 и БОСС 06. Второй выход БОВПС 05 соединен с вторым входом БОСС 06, второй выход БОСС 06 соединен с вторым входом БОВПС 05. Первые выходы БОВПС 05 и БОСС 06 соединены с входом ЗУ 07, выход которого соединен с входом ВУ 08. Выход ВУ 08 соединен со входом с БИ 09.
АС 01 принимает сигнал от ретрансляторов, передает его в РПУ 02, в котором выполняется аналого-цифровое преобразование с выделением квадратурных каналов, цифровая фильтрация и получение амплитудных значений. Из РПУ 02 обработанный сигнал переходит в УРС 03 для регистрации сигнала, из которого последовательно переходит в ДС 04. В ДС 04 получают информацию из принятых сигналов, необходимую для их дальнейшей обработки. Из ДС 04 обработанная информация переходит в БОВПС 05, где происходит формирование временных зависимостей, и в БОСС 06, где определяется структура сигнала для одного периода излучения для дальнейшей экстраполяции, в БОВПС 05 и БОСС 06 осуществляется взаимообмен информации для формирования временных зависимостей и структуры сигнала. Из БОВПС 05 и БОСС 06 информация переходит в ЗУ 07, где сохраняется, и передается на ВУ 08 для дальнейшей обработки и определения местоположения ПП - приемника сигналов авиационных телекоммуникационных систем на основе первичных координат - разностей расстояний между ПП и «опорным» ретранслятором и между ПП и каждым оставшимся последовательно облучаемым ретранслятором. Полученные данные передаются из ВУ 08 на БИ 09 для визуализации полученных результатов.
Таким образом, предлагаемый способ позволяет определить местоположение ПП - приемника сигналов авиационных телекоммуникационных систем на основе приема и обработки сигналов от приемоответчиков воздушных судов, что расширяет арсенал технических средств оценки местоположения объектов в случае приема только сигналов авиационных телекоммуникационных систем.
Способ определения местоположения приемника сигналов авиационных телекоммуникационных систем, при котором определяют характеристики источника радиоизлучения: структуру сигнала для одного периода излучения и период вращения направленной антенны, выбирают «опорный» ретранслятор из числа всех ретрансляторов, экстраполируют сигналы, принятые от «опорного» ретранслятора на основе данных о структуре сигнала для одного периода излучения и периоде вращения направленной антенны, измеряют первичные пространственно-информационные параметры, представляющие задержки времени между экстраполированными сигналами «опорного» ретранслятора и принятыми сигналами оставшихся последовательно облучаемых ретрансляторов, формируют для первичных координат соответствующие поверхности положения, формируют возможные группы линий положения как геометрическое место точек пересечения поверхностей положения соответствующих групп с поверхностью Земли, отличающийся тем, что дополнительно до определения характеристик источника радиоизлучения на пункте приема с неизвестными координатами последовательно принимают сигналы от N'' последовательно облучаемых ретрансляторов - приемоответчиков авиационных телекоммуникационных систем, инициируемых источником радиоизлучения с периодической структурой сигнала и вращающейся направленной антенной - запросчиком авиационных телекоммуникационных систем с известными координатами, одновременно принимают и обрабатывают сигналы приемоответчиков авиационных телекоммуникационных систем, содержащие информацию об их местоположении, после измерения первичных пространственно-информационных параметров формируют по измеренным первичным пространственно-информационным параметрам соответствующие первичные координаты - разности расстояний между пунктом приема и «опорным» ретранслятором и между пунктом приема и каждым оставшимся последовательно облучаемым ретранслятором, а после формирования возможных групп линий положения определяют местоположение пункта приема - приемника сигналов авиационных телекоммуникационных систем.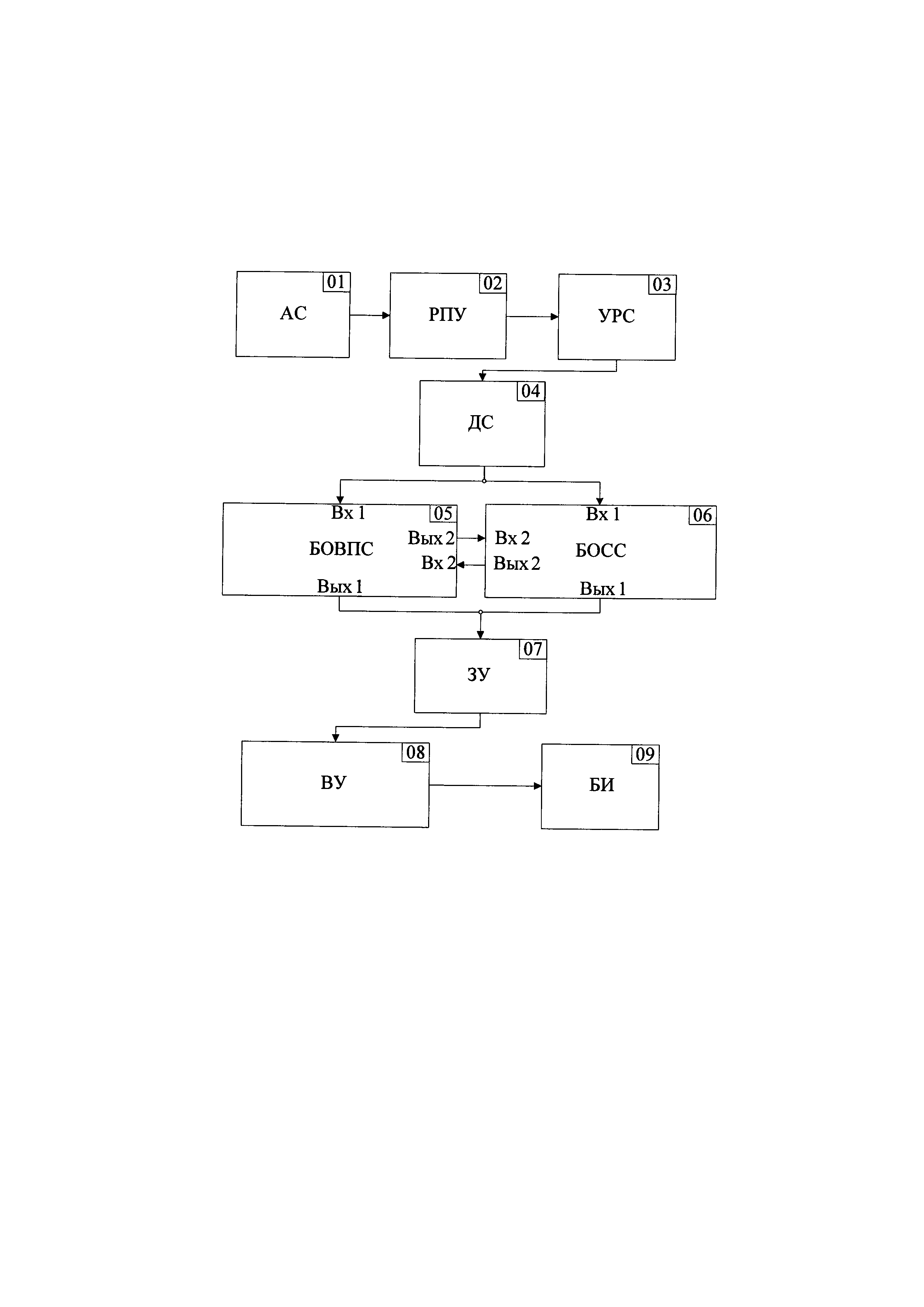
Способ обзора воздушного пространства радиолокационной станцией с активной фазированной антенной решеткой
Способ углового сверхразрешения в приемных цифровых антенных решетках
Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов
Способ построения радиолокационного запросчика
Способ формирования провалов в диаграммах направленности активных фазированных антенных решеток в направлениях источников помех
Способ построения вибраторного излучателя
Способ построения активной фазированной антенной решетки
Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов
Способ построения планарного трансформатора
Способ обучения искусственной нейронной сети
Способ обнаружения малых беспилотных летательных аппаратов
Мультисенсорный способ обнаружения беспилотных летательных аппаратов
Мультисенсорный способ обнаружения беспилотных летательных аппаратов
Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса
Уравновешенное опорно-поворотное устройство

