Результат интеллектуальной деятельности: Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов
Вид РИД
Изобретение
Изобретение относится к области радиотехники и может быть использовано в системах обзорной двухпозиционной радиолокации, обеспечивая снижение ошибок местоопределения авиационно-космических объектов (АКО), определение их скоростей, построение траекторий движения и повышение пространственной разрешающей способности.
В настоящее время основным источником информации о перемещении АКО в пространстве являются радиолокационные системы (РЛС), позволяющие решать задачи обнаружения, определения местоположения и измерения параметров траекторий объектов, а также распознавания их типов. Эти системы должны быть быстродействующими и высокоточными, так как современные АКО могут перемещаться по сложным траекториям с большими (в том числе гиперзвуковыми) скоростями.
Наиболее распространенным типом РЛС являются активные однопозиционные системы, измеряющие дальности и угловые координаты (УК) объектов, то есть РЛС угломерно-дальномерного типа. Высокие точность измерения дальности и разрешающая способность по дальности в этих РЛС могут быть обеспечены путем использования зондирующих сигналов с внутриимпульсной угловой модуляцией и сжатием импульсов при приеме, а точность измерения УК обеспечивается применением в РЛС антенн с узкими диаграммами направленности (ДН). Ошибка местоопределения АКО в пространстве радиолокационными системами угломерно-дальномерного типа определяется, в основном, точностью измерения УК.
Лучшая точность угловых измерений может быть обеспечена, как известно, моноимпульсным методом [1 - Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация - М.: Радио и связь, 1984. - 312 с.]. Необходимое быстродействие РЛС достигается за счет использования обзорных режимов работы, позволяющих одновременно определить координаты всех АКО, находящихся в зоне перекрытия парциальных ДН. Задача повышения точности измерения УК и расширения рабочей зоны при однопозиционной обзорной моноимпульсной пеленгации и повышения скорости измерений УК решена в предложенном ранее способе [2 - патент 2583849, РФ, G01S 3/14, H01Q 25/02. Способ цифровой обработки сигналов при обзорной моноимпульсной амплитудной суммарно-разностной пеленгации с использованием антенной решетки (варианты) и обзорный моноимпульсный амплитудный суммарно-разностный пеленгатор с использованием антенной решетки и цифровой обработки сигналов / Джиоев А.Л., Омельчук И.С, Фоминченко Г.Л., Фоминченко Г.Г., Яковленко В.В. Заявл. 13.04.2015, опубл. 10.05.2016]. Этот способ и пеленгатор на его основе позволяют путем выбора угла разноса парциальных ДН и вида весовой функции (ВФ) сформировать пеленгационную характеристику (ПХ) устройства, практически линейную в рабочей зоне, равной ширине моноимпульсной группы лучей (МГЛ) по уровню половинной мощности, и обеспечить моноимпульсное измерение УК с точностью не хуже 0,01 от размера этой зоны.
Однако способ [2] не предназначен для определения параметров траекторий АКО и скоростей их движения. Частично эта задача решена в [3 - Патент 2617830, РФ, G01S 11/00, G01S 11/10. Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа / Джиоев А.Л., Омельчук И.С., Тюрин Д.А., Фоминченко Г.Л., Фоминченко Г.Г., Яковленко В.В. Заявлен 11.04.2016, опубликован 28.04.2017]. В патенте [3] предложен способ локации, позволяющий определить в пассивном режиме (инверсным кинематическим угломерно-разностно-доплеровским способом при автосопровождении по УК и частоте) направление движения объекта (курсовой угол), величину модуля линейной скорости, значения наклонной дальности и траекторию его движения.
Однако точность измерения этих параметров в [3] для местоопределения АКО не всегда достаточна.
Существенное улучшение точности измерения местоположения АКО возможно при использовании нескольких разнесенных в пространстве РЛС, объединенных в многопозиционную систему [4 - Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. М.: Радио и связь. 1986. 264 с.]. Кроме этого, многопозиционные системы позволяют измерять вектор скорости объекта, увеличить разрешающую способность и повысить защищенность от активных и пассивных помех. Поэтому они представляют интерес для решения рассматриваемых проблем.
Способ измерения координат с повышенной точностью с помощью многопозиционной РЛС известен, например, из [5 - Патент 2515571, РФ, G01S 13/46. Способ определения координат цели в трехпозиционной дальномерной радиолокационной системе / Машков Г.М., Борисов Е.Г. Заявлен 5.10.2012, опубликован 10.05.2014]. Он позволяет, кроме координат, определять скорость цели и ее ускорение. Для этого излучение зондирующих и прием отраженных сигналов осуществляют на каждой позиции системы, там же измеряют дальности до цели и скорости изменения дальности. Далее, как указано в [5], измеряют две суммы дальностей от одной позиции до цели и от цели до двух других позиций, а также три попарные разности дальностей и скорости их изменения, по которым вычисляют их уточненные значения по приведенным формулам.
Однако в [5] не обеспечено определение направлений движения целей (объектов), углов пикирования (кабрирования), не строятся траектории их движения в пространстве. Также не рассмотрены способы улучшения разрешающей способности по УК, хотя это является важным направлением совершенствования РЛС, позволяющим осуществить селекцию элементов групповых объектов (ЭГО).
Для раздельного наблюдения АКО необходимо селектировать отраженные сигналы по доплеровскому изменению частоты, направлению прихода или задержке. В типовых обзорных РЛС стробы сопровождения по дальности и углам существенно различаются - размер строба по дальности намного меньше размера строба по УК [6 - патент 2480782, РФ. Способ и устройство разрешения движущихся целей по угловым направлениям в обзорных РЛС / Ирхин В.И., Замятина И.Н. Заявл. 6.10.2011, опубл. 27.04.2013]. Для обеспечения же улучшенных характеристик РЛС разрешение по угловым координатам (в линейном измерении) должно быть близким к разрешению по дальности. Линейное разрешение составляет в [6] на дальности D величину  где ϑ0,5 - ширина ДН по уровню минус 3 дБ. Так как при равномерном распределении поля по апертуре антенны ϑ0,5=λ/d (d - размер апертуры, λ - длина волны), то линейное разрешение составляет
где ϑ0,5 - ширина ДН по уровню минус 3 дБ. Так как при равномерном распределении поля по апертуре антенны ϑ0,5=λ/d (d - размер апертуры, λ - длина волны), то линейное разрешение составляет  Поэтому очевидный путь улучшения разрешающей способности по УК - увеличение размера апертуры антенны или использование многопозиционных систем.
Поэтому очевидный путь улучшения разрешающей способности по УК - увеличение размера апертуры антенны или использование многопозиционных систем.
Недостатком способа [6] является отсутствие операций по определению параметров траекторий целей.
Известен способ [7 - патент 2279105, РФ, G01S 13/42, G01S 13/72. Комплексный способ определения координат и параметров траекторного движения авиационно-космических объектов, наблюдаемых группировкой станций слежения / Мамошин В.Р. Заявл. 2.08.2004, опубл. 27.06.2006]. В нем на взаимодействующих станциях синхронно измеряют координаты объектов, получают избыточную информацию о параметрах траекторного движения наблюдаемых объектов и «передают ее по межстанционным дуплексным каналам связи на пункты контроля воздушно-космического пространства, где их представляют в единой земной базисной системе координат», и после статистической обработки получают уточненные оценки параметров траекторного движения объектов.
К недостаткам [7] относятся:
- излишние затраты времени на статистическую обработку избыточной неравноточной информации о параметрах движения объектов;
- использование при расчетах на горизонтальной плоскости значений наклонных дальностей и пространственных скоростей вместо значений их проекций на эту плоскость, что вносит дополнительные погрешности при построении траекторий движения.
Таким образом, улучшение точности определения координат и траекторий авиационно-космических объектов, а также их углового разрешения, при локации в расширенной рабочей зоне и сокращение числа позиций радиолокационной системы является актуальным.
Минимальным числом позиций в многопозиционных РЛС являются две, и такие РЛС называют двухпозиционными. Известен способ двухпозиционной радиолокации воздушных объектов [8 - Справочник по радиолокации. Под редакцией М. Сколника. Т. 4. Радиолокационные станции и системы. М.: Сов. радио. 1978. 264 с.], [9 - Справочник по радиолокации. Под редакцией М.И. Сколника. Книга 2. М.: Техносфера. 2014. 680 с.]. Аналогом заявляемого изобретения является способ, более подробно описанный и поясненный рис. 6а [8. С. 204-205]. Определение положения объекта осуществляется за счет измерения расстояний до него и его угловых координат с двух позиций, разнесенных на величину базы d.
К недостаткам аналога [8] относятся:
- зависимость точности определения местоположения объектов от точности измерения угловых координат;
- отсутствие операций по определению параметров траекторий объектов.
Наиболее близким по технической сущности к заявляемому предложению является способ, описанный в [10 - Оценивание дальности и скорости в радиолокационных системах. Часть 3. Под редакцией B.C. Вербы и В.И. Меркулова. М.: Радиотехника. 2010. 468 с. С. 263-364], принятый за прототип. Заявляемому предложению соответствует 3-й тип РЛС по классификации [10], они названы полуактивными [10, стр. 264]. В этих РЛС зондирующий сигнал излучается с одной из позиций, а отраженный сигнал принимается на каждой позиции. По результатам измерений оцениваются дальность и скорость [10, стр. 290-295] перемещения объектов.
Недостатками прототипа [10] являются:
- низкая точность вычислений местоположения воздушных целей (объектов), определяемая точностью измерения УК;
- зависимость точности определения параметров их траекторий (векторов скорости, курсовых углов) от ошибок измерения УК.
Технических решений, устраняющих эти недостатки при определении в расширенной рабочей зоне координат и траекторий перемещающихся в пространстве АКО, авторами предлагаемого изобретения не обнаружено.
Технической проблемой является улучшение точности местоопределения АКО и разрешающей способности системы при определении параметров движения и траекторий АКО, а также улучшение ее помехозащищенности при двухпозиционной радиолокации.
Для решения указанной технической проблемы предлагается способ обзорной трехкоординатной двухпозиционной латерационной радиолокации АКО, для чего
образуют двухпозиционную радиолокационную систему в составе активного трехкоординатного радиолокатора, расположенного в точке 0 - начале системы координат, и ретранслятора отраженных от объектов сигналов, расположенного в точке В на оси абсцисс х на расстоянии d от начала координат,
используют в радиолокаторе цифровую антенную решетку или антенную решетку с цифровой обработкой сигналов, применяя на ее раскрыве весовую функцию Хэмминга, формируют в пространстве моноимпульсную группу парциальных лучей с углами смещения βсм и εсм по азимуту и углу места соответственно, обеспечивающими получение пеленгационной характеристики, линейной в рабочей зоне ΔβПХ по азимуту и ΔεПХ по углу места и перекрывающей всю ширину упомянутой моноимпульсной группы лучей,
разбивают заданную область обзора пространства на участки размером ΔβПХ по азимуту и ΔεПХ по углу места и, последовательно устанавливая равносигнальное направление моноимпульсной группы лучей радиолокатора в центры этих участков, излучая зондирующие импульсы и принимая отраженные от лоцируемых объектов сигналы, осуществляют обзор упомянутой области и определяют пространственное положение всех объектов, перемещающихся в пространстве по траекториям с произвольными углами пикирования или кабрирования, запоминают текущие значения их наклонных дальностей R0,k, где  - номера точек Ak на траекториях объектов, и оценочные значения их угловых координат - азимута
- номера точек Ak на траекториях объектов, и оценочные значения их угловых координат - азимута  и угла места
и угла места  вычисляемых относительно упомянутого равносигнального направления путем решения линейных пеленгационных уравнений,
вычисляемых относительно упомянутого равносигнального направления путем решения линейных пеленгационных уравнений,
используют в ретрансляторе приемную антенну с осесимметричной диаграммой направленности, ширина которой в азимутальной и угломестной плоскостях близка к соответствующей ширине диаграммы направленности суммарного канала антенной решетки радиолокатора,
рассчитывают оценочные прямоугольные координаты объектов относительно точки стояния активного радиолокатора, пересчитывают их к точке стояния ретранслятора, определяют оценочные значения азимутов  и углов места
и углов места  объектов относительно точки стояния ретранслятора, производят наведение антенны ретранслятора на каждый объект, принимают и ретранслируют отраженные от них сигналы в направлении активного радиолокатора, измеряют длительность задержки распространения зондирующих сигналов по пути радиолокатор - объект - ретранслятор - радиолокатор
объектов относительно точки стояния ретранслятора, производят наведение антенны ретранслятора на каждый объект, принимают и ретранслируют отраженные от них сигналы в направлении активного радиолокатора, измеряют длительность задержки распространения зондирующих сигналов по пути радиолокатор - объект - ретранслятор - радиолокатор
где с = 299792458 м/с - скорость распространения электромагнитных волн.
Согласно изобретению,
вычисляют значения дальностей RB,k объектов относительно точки стояния ретранслятора

определяют значения абсцисс объектов для точек Ak траекторий
и точные значения косинусов углов

на наклонных плоскостях 0Akxk между осью абсцисс и наклонными дальностями R0,k,
вычисляют на наклонных плоскостях 0AkD, проходящих через вспомогательную точку D на оси ординат у, отстоящую от начала координат на расстояние d, значения косинусов углов

между наклонными дальностями R0,k и осью ординат и значения дальностей RD,k от точки D до объектов как

определяют средние за М зондирований значения дальностей RD,k как
вычисляют и запоминают усредненные значения прямоугольных координат АКО

определяющие совместно с абсциссой xk их местоположение в пространстве, а также усредненные значения угловых координат
повторяют вышеприведенные вычисления для точек Ak+1 траекторий объектов в моменты времени tk+1, запоминают их значения и определяют приращения прямоугольных координат объектов  за время обзора Тобз=tk+1-tk=Δtk+1,k,
за время обзора Тобз=tk+1-tk=Δtk+1,k,
вычисляют расстояния, пройденные объектами за интервал времени Тобз

модули скоростей движения объектов
значения пространственных курсовых углов
и значения углов пикирования или кабрирования
периодически повторяя операции по обзору заданного сектора пространства, измерению первичных параметров, таких как дальности и угловые координаты, и расчету параметров движения, а именно, курсовых углов, векторов скорости и углов пикирования или кабрирования, для всех лоцируемых объектов, строят траектории их движения, аппроксимируя их векторными отрезками 
Техническим результатом, достигаемым при использовании предлагаемого изобретения, является определение значений дальностей, угловых координат, модулей скоростей движения АКО, пространственных курсовых углов, углов пикирования или кабрирования и траекторий их движения, а также структура радиолокационной системы, реализующей предложенный способ.
Предлагаемое изобретение не известно в современной радиотехнике, а также не известны источники информации, содержащие сведения об аналогичных технических решениях, имеющих признаки, сходные с совокупностью признаков, отличающей заявляемое решение от прототипа, а также имеющих свойства, совпадающие со свойствами заявляемого решения. Поэтому можно считать, что оно обладает существенными отличиями и, следовательно, соответствует критериям «новизна» и «изобретательский уровень».
Сущность изобретения поясняется следующими фигурами:
фигура 1 - геометрия задачи в прямоугольной системе координат;
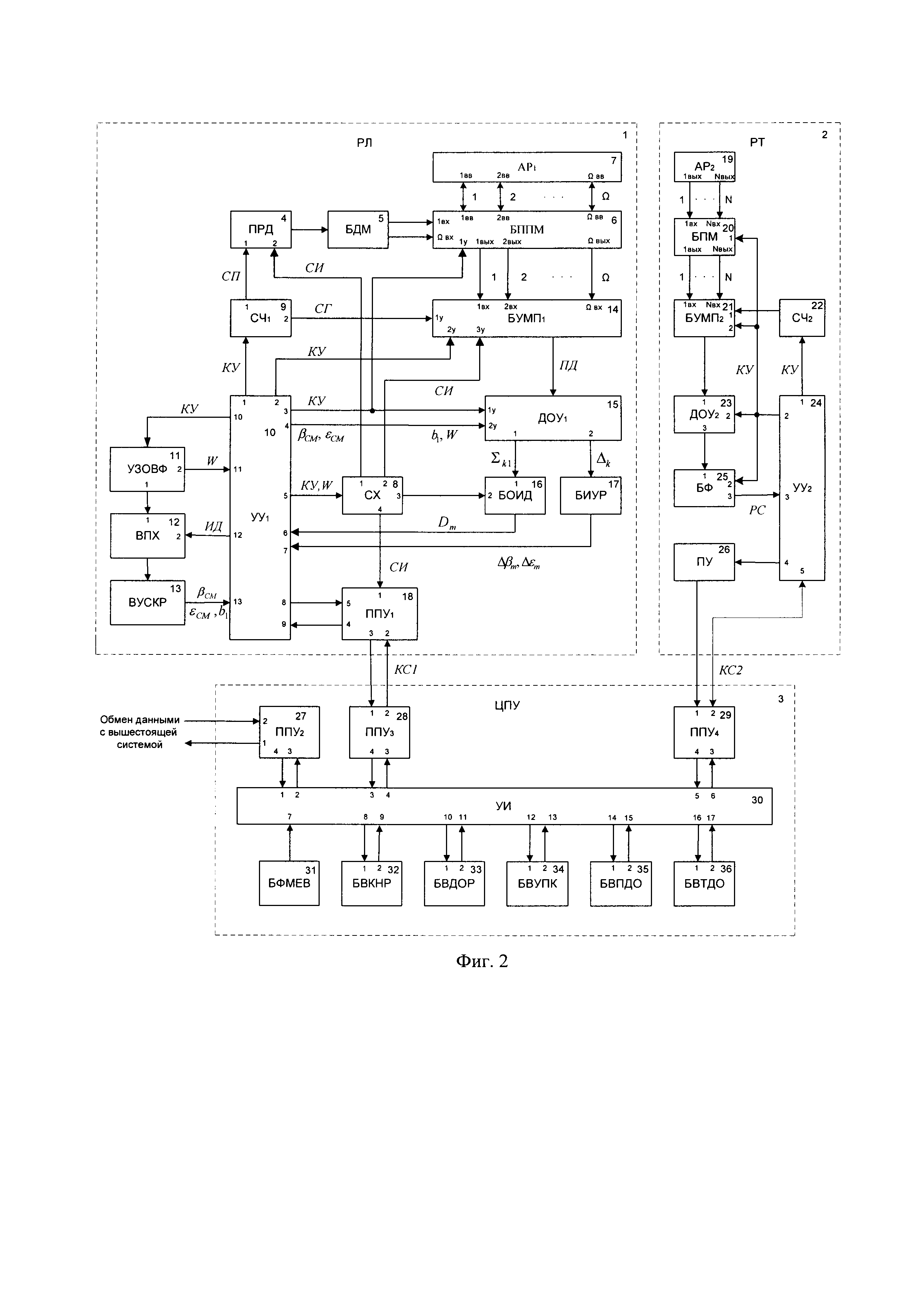
фигура 2 - структурная схема системы, реализующей предложенный способ.
При реализации предложенного способа выполняется следующая последовательность операций.
1. Образуют двухпозиционную радиолокационную систему в составе активного трехкоординатного радиолокатора, расположенного в точке 0 - начале системы координат, и ретранслятора отраженных от объектов сигналов, расположенного в точке В на оси абсцисс х на расстоянии d от начала координат и соединенного с радиолокатором каналом связи для управления наведением антенны ретранслятора.
2. Используют в радиолокаторе цифровую антенную решетку или антенную решетку с цифровой обработкой сигналов, применяя на ее раскрыве весовую функцию Хэмминга, формируют в пространстве моноимпульсную группу парциальных лучей с углами смещения βсм и εсм по азимуту и углу места соответственно, обеспечивающими получение пеленгационной характеристики, линейной в рабочей зоне ΔβПХ по азимуту и ΔεПХ по углу места и перекрывающей всю ширину упомянутой моноимпульсной группы лучей. Величины ΔβПХ и ΔεПХ обоснованы в патенте [2].
3. Разбивают заданную область обзора пространства на участки размером ΔβПХ по азимуту и ΔεПХ по углу места и, последовательно устанавливая равносигнальное направление моноимпульсной группы лучей радиолокатора в центры этих участков, излучая зондирующие импульсы и принимая отраженные от лоцируемых объектов сигналы, осуществляют обзор упомянутой области и определяют пространственное положение всех объектов, перемещающихся в пространстве по траекториям с произвольными углами пикирования или кабрирования, запоминают текущие значения их наклонных дальностей R0,k, где  - номера точек Ak на траекториях объектов, и оценочные значения их угловых координат - азимута
- номера точек Ak на траекториях объектов, и оценочные значения их угловых координат - азимута  и угла места
и угла места  вычисляемых относительно упомянутого равносигнального направления путем решения линейных пеленгационных уравнений.
вычисляемых относительно упомянутого равносигнального направления путем решения линейных пеленгационных уравнений.
4. Используют в ретрансляторе приемную антенну с осесимметричной диаграммой направленности, ширина которой в азимутальной и угломестной плоскостях близка к соответствующей ширине диаграммы направленности суммарного канала антенной решетки радиолокатора.
5. Рассчитывают оценочные прямоугольные координаты объектов относительно точки стояния активного радиолокатора, пересчитывают их к точке стояния ретранслятора, определяют оценочные значения азимутов  и углов места
и углов места  объектов относительно точки стояния ретранслятора, производят наведение антенны ретранслятора на каждый объект, принимают и ретранслируют отраженные от них сигналы в направлении активного радиолокатора.
объектов относительно точки стояния ретранслятора, производят наведение антенны ретранслятора на каждый объект, принимают и ретранслируют отраженные от них сигналы в направлении активного радиолокатора.
Измеряют длительность задержки распространения зондирующих сигналов по пути радиолокатор - объект - ретранслятор - радиолокатор
где с = 299792458 м/с - скорость распространения электромагнитных волн.
6. Вычисляют значения дальностей RB,k объектов относительно точки стояния ретранслятора

7. Определяют значения абсцисс объектов для точек Ak траекторий
и точные значения косинусов углов

на наклонных плоскостях 0Akxk между осью абсцисс и наклонными дальностями R0,k.
8. Вычисляют на наклонных плоскостях 0AkD, проходящих через вспомогательную точку D на оси ординат у, отстоящую от начала координат на расстояние d, значения косинусов углов

между наклонными дальностями R0,k и осью ординат и значения дальностей RD,k от точки D до объектов

9. Определяют средние за М зондирований значения дальностей RD,k

10. Вычисляют и запоминают усредненные значения прямоугольных координат АКО
определяющие совместно с абсциссой xk их местоположение в пространстве, а также усредненные значения угловых координат
11. Повторяют вышеприведенные вычисления для точек Ak+1 траекторий объектов в моменты времени tk+1, запоминают их значения и определяют приращения прямоугольных координат объектов  за время обзора Тобз=tk+1-tk=Δtk+1,k,
за время обзора Тобз=tk+1-tk=Δtk+1,k,
12. Вычисляют расстояния, пройденные объектами за интервал времени Тобз

модули скоростей движения объектов
значения пространственных курсовых углов
и значения углов пикирования или кабрирования
13. Периодически повторяя операции по обзору заданного сектора пространства, измерению первичных параметров, таких как дальности и угловые координаты, и расчету параметров движения, а именно, курсовых углов, векторов скорости и углов пикирования или кабрирования, для всех лоцируемых объектов, строят траектории их движения, аппроксимируя их векторными отрезками 
Примером системы, реализующей предложенный способ, является обзорная трехкоординатная двухпозиционная латерационная радиолокационная система, структурная схема которой приведена на фигуре 2, где приняты следующие обозначения:
1 - радиолокатор (РЛ);
2 - ретранслятор (РТ);
3 - центральный пункт управления (ЦПУ);
4 - передатчик (ПРД);
5 - блок делителей мощности (БДМ);
6 - блок приемо-передающих модулей (БППМ);
7 - антенная решетка (AP1);
8 - синхронизатор (СХ);
9 - синтезатор частот (СЧ1);
10 - устройство управления (УУ1);
11 - устройство запоминания отсчетов весовой функции (УЗОВФ);
12 - вычислитель пеленгационных характеристик (ВПХ);
13 - вычислитель углов смещения максимумов ДН в МГЛ от РСН и коэффициентов разложения функции, описывающей ПХ (ВУСКР);
14 - блок умножителей и маршрутизатор потока данных (БУМП1);
15 - диаграммообразующее устройство (ДОУ1);
16 - блок обнаружителей и измерителей дальностей (БОИД);
17 - блок измерителей угловых рассогласований (БИУР);
18 - приемо-передающее устройство обмена данными (ППУ1);
19 - антенная решетка (АР2);
20 - блок приемных модулей (БПМ);
21 - блок умножителей и маршрутизатор потока данных (БУМП2);
22 - синтезатор частот (СЧ2);
23 - диаграммообразующее устройство (ДОУ2);
24 - устройство управления (УУ2);
25 - блок фильтров (БФ);
26 -передающее устройство ретрансляции сигналов (ПУ);
27 - приемо-передающее устройство обмена данными (ППУ2);
28 - приемо-передающее устройство обмена данными (ППУ3);
29 - приемо-передающее устройство обмена данными (ППУ4);
30 - устройство интерфейсное (УИ);
31 - блок формирования меток единого времени (БФМЕВ);
32 - блок вычислителя координат наведения ретранслятора (БВКНР);
33 - блок вычислителя дальностей объект - ретранслятор (БВДОР);
34 - блок вычислителя усредненных прямоугольных координат (БВУПК);
35 - блок вычислителя параметров движения объектов (БВПДО);
36 - блок вычислителя траекторий движения объектов (БВТДО).
На фигуре 2 использованы дополнительные сокращения:
ИД - исходные данные,
КС - канал связи,
КУ - команда управления,
ПД - поток данных,
PC - ретранслируемый сигнал,
СГ - сигнал гетеродина,
СИ - синхроимпульс,
СП - сигнал передатчика.
Обзорная трехкоординатная двухпозиционная РЛС содержит (фигура 2) РЛ 1 и РТ 2, соединенные с ЦПУ 3 дуплексными КС 1 и КС 2, соответственно. В состав РЛ 1 входит ПРД 4, выход которого подключен ко входу БДМ 5, выходы которого соединены с входами 1вх…Ωвх БППМ 6. Входы-выходы 1вв…Ωвв БППМ 6 соединены с одноименными входами-выходами AP1 7, а выходы 1вых…Ωвых БППМ 6 подключены к сигнальным входам 1вх…Ωвх БУМП1 14.
Первый выход СХ 8 соединен со вторым входом ПРД 4, первый вход которого подключен к первому выходу СЧ1 9, второй выход которого соединен с к первым управляющим входом 1у БУМП1 14, а ко второму управляющему входу 2у БУМП1 14 подключен второй выход УУ1 10, первый выход которого соединен со входом СЧ1 9.
Второй выход СХ 8 соединен с третьим управляющим входом 3у БУМП1 14, а третий выход СХ 8 - со вторым входом БОИД 16. Четвертый выход СХ 8 подключен к первому входу ППУ1 18. Ко входу СХ 8 подключен пятый выход УУ1 10. Сигнальный выход БУМП1 14 подключен к сигнальному входу ДОУ1 15, первый выход которого подключен к первому входу БОИД 16, а второй выход - ко входу БИУР 17, выход которого соединен с седьмым входом УУ1 10. К шестому входу УУ1 10 подключен выход БОИД 16. Третий выход УУ1 10 соединен с первыми управляющими входами 1у БППМ 6 и ДОУ1 15, а четвертый выход УУ1 10 - со вторым управляющим входом 2у ДОУ1 15.
Восьмой выход УУ1 10 подключен к пятому входу ППУ1 18, четвертый выход которого соединен с девятым входом УУ1 10. Десятый выход УУ1 10 подключен ко входу УЗОВФ 11, первый выход которого подключен к первому входу ВПХ 12, а второй выход - к одиннадцатому входу УУ1 10. Двенадцатый выход УУ1 10 подключен ко второму входу ВПХ 12, выход которого соединен со входом ВУСКР 13. Выход ВУСКР 13 подключен к тринадцатому входу УУ1 10.
Второй вход и третий выход ППУ1 18 соединены через КС1 со вторым выходом и первым входом ППУ3 28, входящего в состав ЦПУ 3.
В состав РТ 2 входит АР2 19, выходы 1вых…Nвых которой подключены ко входам 1вх…Nвх БПМ 20, выходы 1вых…Nвых которого соединены с входами 1вх…Nвх БУМП2 21. Выход БУМП2 21 подключен к первому входу ДОУ2 23, третий выход которого соединен с первым входом БФ 25. Первый вход БУМП2 21 подключен к выходу СЧ2 22, вход которого соединен с первым выходом УУ2 24. Второй выход УУ2 24 подключен к первому входу БПМ 20 и ко вторым входам БУМП2 21, ДОУ2 23 и БФ 25. Третий выход БФ 25 соединен с третьим входом УУ2 24.
Четвертый выход УУ2 24 соединен со входом ПУ 26, выход которого через КС2 соединен первым входом ППУ4 29, входящего в состав ЦПУ 3. Пятый вход-выход УУ2 24 через КС2 соединен со вторым входом-выходом ППУ4 29.
Третий вход и четвертый выход ППУ3 28 подключены соответственно к четвертому выходу и третьему входу УИ 30, а третий вход и четвертый выход ППУ4 29 - к шестому выходу и пятому входу УИ 30, к седьмому входу которого подключен выход БФМЕВ 31. Первый вход и второй выход УИ 30 подключены соответственно к четвертому выходу и третьему входу ППУ2 27, первый выход и второй вход которого являются границей РЛС (соединяются с вышестоящей системой). Первый вход и второй выход БВКНР 32 подключены соответственно к восьмому выходу и девятому входу УИ 30, а первый вход и второй выход БВДОР 33 - соответственно к десятому выходу и одиннадцатому входу УИ 30.
В состав РЛС введены вновь БВУПК 34, БВПДО 35 и БВТДО 36. Первый вход и второй выход БВУПК 34 подключены соответственно к двенадцатому выходу и тринадцатому входу УИ 30, а первый вход и второй выход БВПДО 35 - к четырнадцатому выходу и пятнадцатому входу УИ 30. Первый вход и второй выход БВТДО 36 подключены соответственно к шестнадцатому выходу и семнадцатому входу УИ 30.
РЛС работает следующим образом.
Радиолокатор 1 и ретранслятор 2 размещены на местности так, что образуется двухпозиционная РЛС с базой d, ориентированной по оси абсцисс системы координат 0xyz (фигура 1). При этом РЛ 1 находится в точке 0 (начале координат), а РТ 2 - в точке В на оси абсцисс. Лоцируемый объект находится в точке А1 (начальное положение) и на локальном участке траектории движется прямолинейно и равномерно с произвольным углом пикирования (кабрирования) над поверхностью земли, которая считается плоской. Если объект движется по криволинейной траектории, то осуществляется ее кусочно-линейная аппроксимация. АКО движется в пространстве со скоростью V, являющейся модулем вектора скорости V.
В радиолокаторе 1 в качестве АР1 7 применяют цифровую антенную решетку или антенную решетку с цифровой обработкой сигналов и, используя на ее раскрыве весовую функцию Хэмминга, формируют в пространстве моноимпульсную группу парциальных лучей с общим фазовым центром. При этом обеспечивают специальные углы смещения βсм и εсм их максимумов от РСН для получения пеленгационной характеристики, линейной в рабочей зоне ΔβПХ по азимуту и βεПХ по углу места и перекрывающей всю ширину упомянутой МГЛ.
После включения электропитания команда управления с первого выхода УУ1 10 радиолокатора 1 подается на вход СЧ1 9, где синтезируются сигнал передатчика, который с первого выхода СЧ1 9 поступает на первый вход ПРД 4, и сигнал гетеродина, который со второго выхода СЧ1 9 поступает на первый управляющий вход 1у БУМП1 14.
По командам управления с пятого выхода УУ1 10, поступающим на вход СХ 8, с его первого выхода на второй вход ПРД 4 подаются синхроимпульсы, которые подаются также со второго выхода СХ 8 на третий управляющий вход 3у БУМП1 14, и с третьего выхода СХ 8 - на второй вход БОИД 16, а также с четвертого выхода СХ 8 - на первый вход ППУ1 18. При поступлении синхроимпульсов на ПРД 4 он начинает генерировать зондирующие импульсы, которые с его выхода подаются через БДМ 5 на входы 1вх…Ωвх БППМ 6, в котором эти импульсы усиливаются в канальных усилителях мощности каждого приемо-передающего модуля этого блока и, после прохождения через канальные циркуляторы, поступают с входов-выходов 1вв…Ωвв на входы-выходы 1вв…Ωвв AP1 7. Антенные элементы AP1 7 излучают зондирующие импульсы в заданную область пространства.
Отраженные от лоцируемых АКО сигналы принимают антенными элементами АР1 7 и направляют в БППМ 6, где после прохождения через циркуляторы в каждом модуле они усиливаются в последовательно включенных малошумящем усилителе (МШУ) и преобразуются в аналого-цифровом преобразователе (АЦП) на промежуточную частоту. Для этого со второго выхода УУ1 10 на второй управляющий вход 2у БУМП1 14 подаются команды управления, а с третьего выхода УУ1 10 команды управления подаются на первые управляющие входы 1у БППМ 6 и ДОУ1 15. По этим командам осуществляется преобразование частоты принятых сигналов, их дискретизация и формирование потока данных, а в ДОУ1 15 происходит формирование диаграммы направленности.
С выходов 1вых…Ωвых БППМ 6 отсчеты смеси эхо-сигналов и шумов подаются на сигнальные входы 1вх…Ωвх БУМП1 14, в котором формируется поток данных, направляемых на вход ДОУ1 15.
В ДОУ1 15 осуществляется весовая обработка этого потока данных путем умножения их на отсчеты W(x, у) функции Хэмминга и формируется МГЛ с общим фазовым центром. Для этого с четвертого выхода УУ1 10 на второй управляющий вход 2у ДОУ1 15 направляют значения ΔβПХ и ΔεПХ, на этот же вход из УУ1 10 направляют отсчеты ВФ и коэффициенты разложения функции, описывающей ПХ. Отсчеты ВФ извлекаются из УЗОВФ 11 по команде управления, поступающей с десятого выхода УУ1 10, они подаются со второго выхода УЗОВФ 11 на одиннадцатый вход УУ1 10. С первого выхода УЗОВФ 11 на первый вход ВПХ 12 подаются отсчеты ВФ, а на второй вход - ИД с двенадцатого выхода УУ1 10. Значения ПХ с выхода ВПХ 12 направляются на вход ВУСКР 13, где вычисляются углы смещения максимумов ДН в МГЛ от РСН, которые вместе с коэффициентами разложения функции, описывающей ПХ, подаются на тринадцатый вход УУ1 10.
С первого выхода ДОУ1 15 суммарный сигнал поступает на первый вход БОИД 16, где определяют, с учетом поступающего на второй вход БОИД 16 синхроимпульсов, время запаздывания эхо-сигналов и дальности до лоцируемых объектов, эти данные с выхода БОИД 16 направляют на шестой вход УУ1 10. Со второго выхода ДОУ1 15 значения углов отклонения от РСН подаются на вход БИУР 17, где вычисляются значения приращений азимутов и углов места, которые с выхода БИУР 17 поступают на седьмой вход УУ1 10.
Через восьмой выход и девятый вход УУ1 10 осуществляют обмен данными с ППУ1 18. Через третий выход и второй вход ППУ1 18, затем через КС 1 производят обмен данными с ППУ3 28 и, затем, с УИ 30 из состава ЦПУ 3.
В ретрансляторе 2 используют антенную решетку АР2 19, антенными элементами которой также, как и элементами AP1 7, принимают отраженные от лоцируемых АКО эхо-сигналы. После включения электропитания принятые сигналы с выходов 1вых…Nвых АР2 19 поступают на входы 1вх…Nвх БПМ 20, где после прохождения циркуляторов усиливаются в канальных МШУ и далее преобразуются на промежуточную частоту, а затем подвергается аналого-цифровому преобразованию. С выходов 1вых…Nвых БПМ 20 отсчеты смеси эхо-сигналов и шумов подаются на сигнальные входы 1вх…Nвх БУМП2 21, где формируется соответствующий поток данных, направляемый на первый вход ДОУ2 23.
С первого выхода УУ2 24 ретранслятора 2 команда управления подается на вход СЧ2 22, где синтезируется сигнал гетеродина, который с выхода СЧ2 22 поступает на первый вход БУМП2 21. На вторые входы БУМП2 21, ДОУ2 23, БФ 25 и первый вход БПМ 20 подаются команды управления, по которым осуществляется усиление принятых сигналов, преобразование частоты и маршрутизация потока данных, а в ДОУ2 23 формируется осесимметричная диаграмма направленности, ширина которой в азимутальной и угломестной плоскостях близка к соответствующей ширине диаграммы направленности суммарного канала радиолокатора 1.
С третьего выхода ДОУ2 23 соответствующие данные поступают на первый вход БФ 25, в котором они фильтруются и образуют ретранслируемый сигнал, который с третьего выхода БФ 25 подается на третий вход УУ2 24. С четвертого выхода УУ2 24 осуществляется ретрансляция сигналов через ПУ 26 и далее через КС 2 на первый вход ППУ4 29 из состава ЦПУ 3. Со второго входа-выхода ППУ4 29 через КС 2 осуществляют обмен данными с пятым входом-выходом УУ2 24.
Обзор пространства осуществляют за счет сканирования МГЛ, для чего разбивают заданную область обзора пространства (телесный угол) на участки размером ΔβПХ по азимуту и ΔεПХ по углу места и, последовательно устанавливая равносигнальное направление МГЛ радиолокатора в центры этих участков, излучая зондирующие импульсы и принимая отраженные от лоцируемых объектов сигналы, осуществляют обзор. Определяют пространственное положение всех перемещающихся в пространстве объектов, запоминают текущие значения их наклонных дальностей R0,k, где  - номера точек Ak на траекториях объектов, и оценочные значения их угловых координат - азимута
- номера точек Ak на траекториях объектов, и оценочные значения их угловых координат - азимута  и угла места
и угла места  вычисляемых относительно упомянутого равносигнального направления путем решения линейных пеленгационных уравнений.
вычисляемых относительно упомянутого равносигнального направления путем решения линейных пеленгационных уравнений.
Измеряют с привязкой к системе единого времени с использованием данных БФМЕВ 31, направляемых в УИ 30, и запоминают для каждого из обнаруженных объектов значения отсчетов наклонных дальностей и угловых координат, вычисляемых относительно равносигнальных направлений путем решения соответствующих линейных уравнений с использованием коэффициентов линейных частей разложений пеленгационных характеристик в ряды Маклорена как функций углов βсм и εсм.
Используя РЛ 1, определяют оценочные прямоугольные координаты объектов относительно точки стояния радиолокатора, пересчитывают их к точке стояния РТ 2 и определяют оценочные значения азимутов  и углов места
и углов места  объектов относительно точки стояния РТ 2. С помощью БВКНР 32 вычисляют координаты наведения РТ 2 и направляют их в УИ 30, чтобы через ППУ4 29 произвести наведение антенны АР2 19 ретранслятора 2 на объекты. Принимают отраженные от объектов сигналы, ретранслируют их через КС 2 в ППУ4 29, откуда направляют их в УИ 30. Измеряют в ЦПУ 3 величины задержки распространения зондирующих сигналов по пути радиолокатор - объект - ретранслятор - радиолокатор
объектов относительно точки стояния РТ 2. С помощью БВКНР 32 вычисляют координаты наведения РТ 2 и направляют их в УИ 30, чтобы через ППУ4 29 произвести наведение антенны АР2 19 ретранслятора 2 на объекты. Принимают отраженные от объектов сигналы, ретранслируют их через КС 2 в ППУ4 29, откуда направляют их в УИ 30. Измеряют в ЦПУ 3 величины задержки распространения зондирующих сигналов по пути радиолокатор - объект - ретранслятор - радиолокатор
где с = 299792458 м/с - скорость распространения электромагнитных волн.
С помощью БВДОР 33 вычисляют значения дальностей RB,k объектов относительно точки стояния РТ 2

С помощью БВУПК 34 осуществляют операции 7-10. Определяют значения абсцисс объектов для точек Ak траекторий
и точные значения косинусов углов

на наклонных плоскостях 0Akxk между осью абсцисс и наклонными дальностями R0,k.
Вычисляют на наклонных плоскостях 0AkD, проходящих через вспомогательную точку D на оси ординат у, отстоящую от начала координат на расстояние d, значения косинусов углов

между наклонными дальностями R0,k и осью ординат и значения дальностей RD,k от точки D до объектов

Полученные данные направляют в УИ 30.
Определяют средние за М зондирований значения дальностей R
и вычисляют с помощью БВУПК 34 усредненные значения прямоугольных координат АКО

определяющие совместно с абсциссой xk их местоположение в пространстве. Запоминают их и вычисляют усредненные значения угловых координат
Полученные данные направляют в УИ 30.
С помощью БВПДО 35 осуществляют операции 11-12. Повторяют вышеприведенные вычисления для точек Ak+1 траекторий объектов в моменты времени tk+1, запоминают их значения и определяют приращения прямоугольных координат объектов  за время обзора Тобз=tk+1-tk=Δtk+1,k.
за время обзора Тобз=tk+1-tk=Δtk+1,k.
Вычисляют расстояния, пройденные объектами за интервал времени Тобз

модули скоростей движения объектов
значения пространственных курсовых углов
и значения углов пикирования (кабрирования)
Полученные данные направляют в УИ 30.
С помощью БВТДО 36 осуществляют операцию 13. Периодически повторяя операции по обзору заданного сектора пространства, измерению первичных параметров, таких как дальности и угловые координаты, и расчету параметров движения, а именно, курсовых углов, векторов скорости и углов пикирования или кабрирования, для всех лоцируемых объектов, строят траектории их движения, аппроксимируя их векторными отрезками  Полученные данные направляют в УИ 30.
Полученные данные направляют в УИ 30.
Все полученные данные из УИ 30 направляют в приемо-передающее устройство обмена данными ППУ2 27, первый выход и второй вход которого соединяются с вышестоящей системой.
Предложенный способ трехкоординатной латерационной радиолокации обеспечивает измерение прямоугольных координат АКО, их пространственных курсовых углов и модулей векторов скорости, а следовательно прогнозирование положения объектов и построение траекторий их движения на основе измерения двух дальностей с двух позиций, разнесенных на величину базы d по оси абсцисс х, и расчета величины третьей дальности относительно третьей точки, отстоящей также на величину d по оси ординат.
Для комплексной оценки качества предлагаемого способа сравним величины среднеквадратических погрешностей (СКП) местоопределения АКО способом - прототипом и предложенным способом.
В прототипе местоположение АКО находится как область пересечения двух сферических поверхностей измерителей дальностей и конической поверхности, образующей которой является одна из наклонных дальностей [4]. СКП местоопределения объекта в этом случае равна

где  - СКП измерения дальностей;
- СКП измерения дальностей;
 - СКП измерения угловых координат;
- СКП измерения угловых координат;
R0,B - дальности объект измеритель;
ε1 - угол места объекта;
 - угол пересечения линий положения на плоскости (окружностей для дальномерных способов).
- угол пересечения линий положения на плоскости (окружностей для дальномерных способов).
В предложенном способе местоположение АКО находится как область пересечения трех сферических поверхностей с центрами в точках 0, B, D и радиусами R0, RB, RD, а СКП местоположения равна
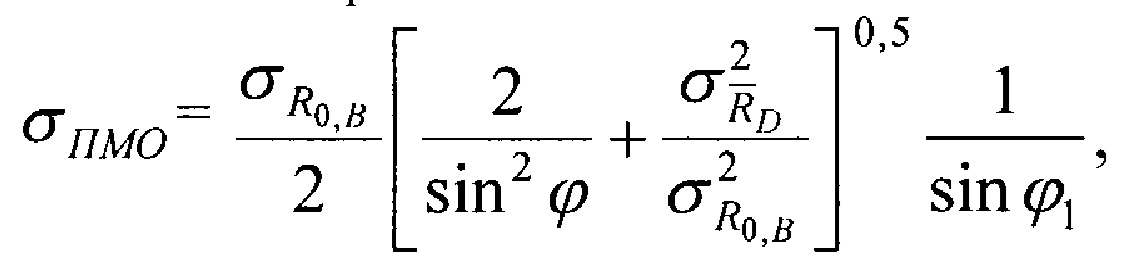
где  - СКП расчета дальности RD;
- СКП расчета дальности RD;
ϕ - угол между дальностями R0 и RB на наклонной плоскости 0AkB;
 - угол между дальностями RD и
- угол между дальностями RD и  на наклонной плоскости DAkxk;
на наклонной плоскости DAkxk;

М - число зондирований, используемых при вычислении усредненного значения дальности 
В случае, когда σR=10 м, σУК=0,3°, R0=105 м, ϕ=30°, ϕ1=40°, βk=45°, εk=45°, М=10 имеем  σМОП=315 м, σПМО=38,2 м, при этом отношение
σМОП=315 м, σПМО=38,2 м, при этом отношение 
Реализация заявляемого способа не встречает затруднений при современном уровне развития радиотехники и устройств цифровой обработки сигналов. Возможность реализации предложенного способа обеспечивает ему критерий «промышленная применимость».
По сравнению с прототипом использование операций предложенного способа обеспечивает определение местоположения объектов с СКП, меньшей в 9,8 раз. При этом достигнуто:
- измерение прямоугольных координат АКО и их наклонных дальностей относительно начала координат с относительными среднеквадратическими погрешностями 
- определение модулей векторов скоростей объектов с относительными СКП 
- измерение пространственных курсовых углов АКО с относительными среднеквадратическими погрешностями 
Все это дает возможность на основе использования двух точно измеренных дальностей до АКО и усредненного значения третьей дальности обеспечить селекцию отдельных элементов перемещающихся в пространстве групповых объектов и раздельное построение траекторий их движения.








Симметричный вибратор укв
Симметричный вибратор
Волноводно-микрополосковый переход с запредельной нагрузкой
Антенная решетка
Резонатор на поверхностных акустических волнах с использованием отражателей в качестве нагревательных элементов
Способ и устройство электрического управления фазой волноводного фазовращателя
Запредельная волноводная нагрузка
Миниатюрный широкополосный квадратурный направленный ответвитель на элементах с сосредоточенными параметрами
Способ формирования диаграммы направленности
Устройство формирования диаграммы направленности активной фазированной антенной решетки
Симметричный вибратор
Антенная решетка
Способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке
Односферовая антенная система с частичной металлизацией радиопрозрачного защитного кожуха
Двухсферовая антенная система с частичной металлизацией радиопрозрачного защитного кожуха
Антенная система
Многодиапазонная зеркальная антенна
Способ цифровой обработки сигналов при обзорной моноимпульсной амплитудной суммарно-разностной пеленгации с использованием антенной решетки (варианты) и обзорный моноимпульсный амплитудный суммарно-разностный пеленгатор с использованием антенной решетки и цифровой обработки сигналов
Радиоприемное устройство цифровой активной фазированной антенной решетки
Симметричный вибратор укв

