Результат интеллектуальной деятельности: Способ определения текущих координат цели в бистатическом режиме гидролокации
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для оценки текущих координат морских подводных объектов при решении задач обнаружения с использованием гидролокаторов с гибкими протяженными буксируемыми антеннами.
При решении задач обнаружения подводных объектов с использованием ненаправленного излучателя и приемной гибкой протяженной буксируемой антенны (ГПБА) возникает неопределенность оценки курсового угла (пеленга) на цель. Такой эффект обусловлен тем, что ГПБА, представляющая собой линейную антенну из ненаправленных преобразователей, симметрична относительно своей оси [Смарышев М.Д. Направленность гидроакустических антенн. Л.: Судостроение, 1973].
В том случае, когда ненаправленный излучатель буксируется совместно с ГПБА одним носителем (режим моностатической гидролокации), неоднозначность определения пеленга устраняется путем изменения курса ГПБА и последующего сравнения пеленгов истинной и ложной (фантомной) цели до и после выполнения маневра. Таким же образом может решаться задача устранения неоднозначности определения пеленга на цель в режиме бистатической гидролокации (БГЛ), когда ненаправленный излучатель и приемная ГПБА находятся на разных носителях.
Известны способы устранения неоднозначности курсового угла цели для линейных протяженных буксируемых антенн без маневрирования по курсу [см. Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. СПб.: Наука, 2004, с. 195, 197]. Однако это требует усложнение конструкции ГПБА (кардиоидные приемники, двухлинейные схемы буксировки и т.п.) и алгоритмов обработки.
Выполнение собственного маневра носителя в реальных условиях не всегда допустимо, что ведет к невозможности устранить неоднозначность оценки пеленга и дистанции до цели.
Наиболее близким аналогом к заявленному предмету изобретения является способ (патент RU №2653956 С1 от 14.04.2017 г. МПК: G01S 15/87), позволяющий устранить неоднозначность определения пеленга на цель на основе использования эффекта Доплера при обнаружении цели ГПБА, состоящей из ненаправленных преобразователей, в режиме бистатической гидролокации при подвижных излучателе и приемнике и курсе носителя ГПБА, не совпадающем с базой разнесенных излучающей и приемной систем.
Данный способ [3, 4] предполагает определение скорости и курса истинной и ложной цели двумя методами: методом, использующим оценки координат цели, полученных на основе определения пеленга и дистанции истинной и ложной цели, а также курса и скорости приемника, и методом, использующим измеренное значение радиальной скорости цели, полученное в приемном тракте ГПБА на основе оценки доплеровского смещения частоты эхосигнала и значения курса и скорости излучателя и приемника. При совпадении в пределах заданной погрешности оценок скорости и курса, полученных двумя методами, пеленг на цель считается верным.
Недостатком указанного способа является некорректность решения задачи устранения неоднозначности пеленга и дистанции цели для некоторых схем маневрирования носителей излучателя, приемника и цели. В частности, когда сумма пеленгов от излучателя на цель и от приемника на цель кратна 180°. Например, если траектория цели совпадает с биссектрисой угла равнобедренного треугольника, основанием которого является расстояние между излучателем и приемником. В этом случае знаменатель в формуле для расчета курса с использованием эффекта Доплера принимает нулевые значения. Если положение цели совпадает линией базы разнесенных излучающей и приемной систем, то знаменатель в формуле для расчета скорости с использованием эффекта Доплера принимает нулевые значения. Хотя данная ситуация исключена в способе-прототипе, однако вблизи этих направлений возрастает чувствительность алгоритмов расчета курса и скорости к случайным ошибкам определения координат целей.
В этих условиях достоверность решения задачи устранения неоднозначности определения пеленга на цель по способу-прототипу, может оказаться недостаточной.
Задачей предлагаемого изобретения является повышение достоверности определения истинных координат цели в режиме бистатической гидролокации путем решения задачи устранения неоднозначности пеленга цели приемной однолинейной ГПБА в условиях ограничений по маневрированию носителя приемника и ограничений по времени решения задачи.
Технический результат предлагаемого технического решения заключается в повышении достоверности определения координат цели при обнаружении однолинейной ГПБА, состоящей из ненаправленных преобразователей, в режиме бистатической гидролокации.
Указанный технический результат достигается тем, что в способе определения текущих координат цели в бистатическом режиме гидролокации, при обнаружении цели ГПБА в режиме бистатической гидролокации, при курсе носителя ГПБА, не совпадающем с базой разнесенных излучающей и приемной систем, включающем:
- излучение гидроакустического сигнала,
- обнаружение отраженного сигнала от цели,
- определение пеленга и дистанции, а также скорости и курса цели, условно находящейся по левому или правому борту,
- определение относительной радиальной скорости цели с использованием эффекта Доплера,
- уточнение оценок скорости или курса истинной цели,
введены новые признаки, а именно:
- определение расчетных значений относительной радиальной скорости цели для условного положения цели по правому и левому борту,
- определение расхождения между оценкой радиальной скорости цели, полученной с использованием эффекта Доплера, и расчетными значениями радиальных скоростей цели для условного положения цели по левому и правому борту,
- при минимальном расхождении между полученными оценками, превышающем пороговое значение, принимают решение об истинных значениях пеленга, дистанции, а также курса и скорости цели.
Поясним достижение технического результата на примере решения задачи устранения неоднозначности определения пеленга на цель с использованием эффекта Доплера в бистатическом режиме гидролокации для типовой тактической ситуации поиска цели с учетом координат и параметров ее движения.
Рассмотрим типовую тактическую ситуацию (см. фиг. 1), когда два корабля-носителя (КН) гидроакустической станции (ГАС) типа «Виньетка-ЭМ» [2] КН(1) и КН(2) двигаются строем «фронта» параллельными курсами и с одинаковыми скоростями V1 и V2.
При этом ГАС одного из КН, например КН(2), используется для излучения, а ГПБА КН(1) используется для приема сигнала (далее КНизл и КНпр). В этом случае пеленг от приемника на излучатель Ппр_и=Кпр+90°.
Предположим, что цель (Ц) маневрирует на прорыв строя «фронта» и курс цели равен Кц=Кпр+180°, скорость цели Vц=3 м/с, скорость приемника V1=Vпр=7 м/с, скорость излучателя V2=Vи=7 м/с. Расстояние между излучателем и приемником (фазовым центром ГПБА) примем L=20 км.
При обнаружении эхосигнала от цели в i-й момент времени (i=1) и решении триангуляционной задачи в эллиптической системе координат в приемнике определяются оценки пеленга Пц, дистанции Dц и суммарной радиальной скорости Vr цели, а начиная со 2-го контакта могут быть получены оценки курса и полной скорости целей для правого (Кц, Vц) и левого (Кц', Vц') борта.
Дистанция до цели определяется по известному расстоянию между излучателем и приемником L, курсовому углу цели КУц и суммы расстояний «излучатель-цель» и «цель-ГПБА» RΣ=(tпр-tи)⋅С, где: tпр - время приема сигнала, tи - время излучения сигнала, С - скорость звука в воде.
Суммарная радиальная скорость Vr определяется на основе оценки доплеровского смещения частоты эхосигнала  где fизл, fпр - частоты излученного и принятого сигналов, С - скорость звука.
где fизл, fпр - частоты излученного и принятого сигналов, С - скорость звука.
Суммарная радиальная скорость Vr цели, обусловленная эффектом Доплера при эхолокации, складывается [5] из относительной скорости перемещения излучателя и цели (Vотн.и-ц), а также относительной скорости перемещения цели и приемника (Vотн.ц-пр).
В нашем случае Vотн.и-ц=V2*cosϕ1+Vц*cosϕ2, Vотн.ц-пр=V1*cosq1+Vц*cosq2, где ϕ1, ϕ2 - углы между вектором скорости излучателя, вектором скорости цели и направлением «излучатель-цель» соответственно, q1, q2 - аналогично углы между вектором скорости приемника, вектором скорости цели и направлением «цель-приемник».
Суммарная радиальная скорость Vr цели численно равна взятому с противоположным знаком общему временному изменению расстояния (ОВИР) «излучатель-цель-приемник». ОВИР цели, например, по правому борту и расчетный ОВИР ложной цели по левому борту, определенные по двум циклам «излучение-прием» при малом времени между измерениями, равном длительности цикла обработки для выбранной шкалы дистанций, за счет геометрии эллипса практически одинаковы

Для второго и последующих эпизодов обнаружения цели (i=2, 3, 4 …) определяют курс и скорость цели по правому и по левому борту по формулам


где: для правого борта


для левого борта


Δt=ti-t1, i=2, 3, 4 …, если X<0, то Кц=2*π-Кц.
Считаем, что в пределах расчетного интервала времени Δt скорость и курс цели постоянны.
По полученным координатам и параметрам движения цели (КПДЦ), а также по известным координатам и параметрам движения излучателя и приемника, как показано в работе [2], могут быть определены расчетные значения радиальной скорости Vpaсч ПБ для цели, условно находящейся по правому борту, радиальной скорости Vрасч ЛБ для цели, условно находящейся по левому борту, по формулам (4) и (5)


где: Пц, Кц - пеленг и курс цели, условно находящейся по правому борту,
Пц'=2π-Пц - пеленг цели, условно находящейся по левому борту,
Кц' - курс цели, условно находящейся по левому борту,
Пеленг от излучателя на цель Пи-ц для цели по правому борту и для цели по левому борту Пи-ц' определяют по формулам (6) и (7)


Для схемы маневрирования, приведенной на рис. 1, выполнены расчетные оценки радиальной скорости цели для левого и правого борта по формулам (4), (5) и ОВИР по формуле (1) в условиях ограничений по времени решения задачи без учета ошибок измерения параметров. Начальный пеленг цели принят равным 40°, начальная дистанция 15 км. Расчеты выполнены для Nц=25 циклов излучение-прием. Длительность одного цикла принята равной Т=40с, Vц=3 м/с, V1=V2=7 м/с, Кц=180°, Кпр=Ки=0°, Ппр_и=90°, L=20 км.
На Фиг. 2 приведены результаты моделирования и показаны зависимости расчетных значений радиальных скоростей цели для правого и левого борта и ОВИР.
Как следует из фиг. 2, до 6-го цикла сопровождения цели с момента обнаружения значения VрасчПБ, VрасчЛБ и ОВИР практически неразличимы, и идентификация борта невозможна. После 10-го цикла сопровождения абсолютное значение разности ⎜VрасчЛБ - ОВИР⎜ более чем в 2 раза превышает абсолютное значение разности ⎜VрасчПБ - ОВИР⎜, что позволяет сделать предварительный вывод о принадлежности истинной цели правому борту. На 16-ом цикле сопровождения цели разность значений VрасчПБ и VрасчЛБ составляет более 2 м/с и при погрешности оценки радиальной скорости цели на основе эффекта Доплера ±0.5 м/с можно уверенно определить борт расположения цели и истинные КПДЦ.
Сущность изобретения поясняется фиг. 1 - фиг. 3.
На Фиг. 1 приведен пример схемы маневрирования корабля-носителя приемника (КНпр), имеющего скорость V1, корабля-носителя излучателя (КНизл), имеющего скорость V2, и цели - Ц, имеющей скорость Vц.
На Фиг. 2 приведены зависимости расчетных значений радиальных скоростей цели правого VрасчПБ и левого борта VрасчЛБ и ОВИР для пеленга от приемника на излучатель Ппр-и=Кпр+90° (Кпр - курс приемника) при курсе цели Кц=Кпр+180°.
На Фиг. 3 приведена блок-схема устройства, реализующего заявленный способ.
Для реализации способа считаем известными следующие величины:
- пеленг (курсовой угол) от приемника на излучатель (Ппр_и), расстояние между приемником (фазовым центром ГПБА) и излучателем (L), скорость (Vи) и курс (Ки) излучателя, скорость (Vпр) и курс (Кпр) приемника, время излучения зондирующего сигнала (tui) и время приема эхосигнала от цели (tпрi) в i-той посылке.
Реализация способа осуществляется следующим образом.
1. Излучателем, установленным на одном из кораблей-носителей ГАС (КНизл) излучают зондирующий сигнал в момент времени tui,
2. Принимают отраженный от цели (Ц) сигнал ГПБА (фиг. 1), буксируемой за другим кораблем-носителем (КНпр), в моменты времени tпрi, i=1 - номер посылки первичного обнаружения цели,
3. Для каждой i-той (i=1, 2, 3 …) посылки определяют курсовой угол цели КУпб, условно находящейся по правому борту, курсовой угол цели, условно находящейся по левому борту КУлб=-КУпб. Соответственно, пеленг цели, условно находящейся по правому борту, равен Пц=Кпр+КУпб, пеленг цели, условно находящейся по левому борту, Пц'=Кпр+КУлб или Пц'=2π-Пц.
4. Для каждой i-той посылки определяют дистанцию до цели, условно находящейся по правому борту по формуле  , а также дистанцию до цели, условно находящейся по левому борту по формуле
, а также дистанцию до цели, условно находящейся по левому борту по формуле  , где:
, где:  - суммарное расстояние «излучатель-цель» (D1) и «цель-приемник» (D2) в каждой i-той посылке, т.е.
- суммарное расстояние «излучатель-цель» (D1) и «цель-приемник» (D2) в каждой i-той посылке, т.е.  , С - скорость звука в воде, Li - расстояние между приемником (фазовым центром ГПБА) и излучателем в каждой i-той посылке, α - угол между отрезками «излучатель-приемник» и «цель-приемник», для цели, условно находящейся по правому борту αпб, и для цели, условно находящейся по левому борту αлб,
, С - скорость звука в воде, Li - расстояние между приемником (фазовым центром ГПБА) и излучателем в каждой i-той посылке, α - угол между отрезками «излучатель-приемник» и «цель-приемник», для цели, условно находящейся по правому борту αпб, и для цели, условно находящейся по левому борту αлб,

При этом αпб определяется для П1=Пц, а αлб для П1=Пц'.
5. Для каждой i-той посылки определяют относительную радиальную скорость цели (Vr) по сдвигу частоты эхосигнала, обусловленному эффектом Доплера,
где: fизл, fпр - частоты излученного и принятого сигналов, С - скорость звука,
6. Для второй посылки (i=2 и последующих) определяют полную скорость и курс цели по правому борту (VПБ, КПБ) и по левому борту (VЛБ, КЛБ) по формулам

где: для правого борта


для левого борта


Δt=tu1-tui - время между первой и i-той посылкой.
7. Определяют пеленг от излучателя на цель Пи-ц для цели по правому борту и для цели по левому борту Пи-ц,
 где
где 
 где
где 
8. Определяют расчетные значения относительной радиальной скорости цели для цели по правому борту VрасчПБ и для цели по левому борту VрасчЛБ по формулам


9. Определяют модуль разности абсолютных значений радиальной скорости цели, полученной с использованием эффекта Доплера, и абсолютных значений радиальных скоростей цели для условного положения цели по левому и правому борту.
Если модуль разности  меньше модуля разности
меньше модуля разности  и модуль разности
и модуль разности  , где ξ - заранее заданное пороговое значение погрешности оценки скорости цели, то положение цели по правому борту считается истинным. Соответственно, если
, где ξ - заранее заданное пороговое значение погрешности оценки скорости цели, то положение цели по правому борту считается истинным. Соответственно, если  и
и  , то принимают решение, что цель расположена цели по левому борту. Выбор истинных координат и параметров движения цели из ранее определенных для левого и правого борта производится с учетом решения об истинном борте расположения цели.
, то принимают решение, что цель расположена цели по левому борту. Выбор истинных координат и параметров движения цели из ранее определенных для левого и правого борта производится с учетом решения об истинном борте расположения цели.
Устройство (фиг. 3), реализующее предлагаемый способ, содержит: излучающий тракт 1, размещаемый на КНизл и включающий генератор 2 сигналов излучения и соединенный с ним всенаправленный излучатель 3, приемный тракт 4 ГПБА, размещаемый на КНпр и включающий последовательно соединенные однолинейную ГПБА 5, блок 6 формирования характеристик направленности (ФХН), блок 7 вычисления пеленга, дистанции, курса и скорости цели, находящейся по правому и левому борту, блок 8 вычисления радиальных скоростей цели правого и левого борта, блок 9 сравнения измеренной и расчетных радиальных скоростей цели. Устройство также содержит блок измерения 10 радиальной скорости цели на основе эффекта Доплера, вход которого подключен к выходу блока 6 формирования ХН, а выход соединен со вторым входом блока 9 сравнения расчетных и измеренной радиальных скоростей цели. Выход блока 9 сравнения расчетных и измеренной радиальных скоростей цели подключен к первому входу блока 12 уточнения координат и параметров движения цели, второй вход которого подключен к выходу блока 7 вычисления пеленга, дистанции, курса и скорости цели (ПDKV). Также содержит буферное запоминающее устройство 10, содержащее данные для вычислений в блоках 7 и 8 (линии связей не показаны).
Реализация данного устройства может быть выполнена с использованием известных технических решений. В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности и обработку сигнала.
Реализация способа с помощью устройства (фиг. 3) осуществляется следующим образом.
С использованием излучающего тракта 1, размещаемого на корабле-носителе излучателя КНизл, включающего генератор сигналов 2 и излучатель 3, в момент времени tui каждую i-ю посылку излучают зондирующие сигналы (ЗС), параметры которых установлены заранее. Отраженный от цели (Ц) сигналы ГПБА 5, буксируемой за другим кораблем-носителем (КНпр), принимают в моменты времени tпрi, i=1, 2, 3 … - отсчеты времени, которые поступают в блок 6 формирования характеристик направленности. С выхода пространственного канала, в котором обнаружен эхосигнал от цели, в блоке 7 вычисляют пеленга, дистанции, курсы и скорости целей, условно находящихся по правому и левому борту. Одновременно выход пространственного канала, в котором обнаружен эхосигнал от цели, поступает на вход блок 10 измерения радиальной скорости цели Vr на основе эффекта Доплера, где путем сравнения частоты ЗС и эхосигнала определяют относительную радиальную скорость цели. С выхода блока 7 данные поступают на первый вход блока 8 вычисления радиальных скоростей цели правого и левого борта, в который из буферного запоминающего устройства 11 поступают данные необходимые для расчетов, в том числе: пеленг (курсовой угол) от приемника на излучатель (Ппр_и), расстояние между приемником (фазовым центром ГПБА) и излучателем (L), скорость (Vи) и курс (Ки) излучателя, скорость (Vпр) и курс (Кпр) приемника, время излучения зондирующего сигнала (tui). В блоке 8 с использованием данных из буферного запоминающего устройства 11 производится вычисление радиальных скоростей цели правого и левого борта по формулам (4) и (5), которые поступают на первый вход блока 9 сравнения расчетных и измеренной радиальных скоростей цели. На второй вход блока 9 поступают данные с выхода блока 10 измерения радиальной скорости цели на основе эффекта Доплера. В блоке 9 производятся логические операции сравнения модулей разности между оценками абсолютных значений радиальной скорости цели, полученной с использованием эффекта Доплера, и радиальных скоростей цели для условного положения цели по левому и правому борту. Результат сравнения поступает на первый вход блока 12 уточнения координат и параметров движения цели, на второй вход которого с выхода блока 7 поступают данные пеленга, дистанции, курса и скорости цели (ПDKV). Выход блока 12 с принятыми в качестве истинных координатами и параметрами движения цели, относящимися к определенному борту ее расположения, является выходом приемного тракта.
Таким образом, поставленная задача повышения достоверности определения истинных координат цели при обнаружении однолинейной ГПБА, состоящей из ненаправленных преобразователей, в режиме бистатической гидролокации в условиях ограничений по маневрированию носителя приемника и ограничений по времени, решена.
Источники информации
1. Смарышев М.Д. Направленность гидроакустических антенн. Л.: Судостроение, 1973].
2. Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. СПб.: Наука, 2004, 410 с. 177 ил.
3. Патент RU №2653956 С1 от 14.04.2017 г., МПК: G01S 15/87, Опубл. Бюл. №14, 15.05.2018 г.
4. Матвеева И.В., Шейнман Е.Л. Определение текущих координат цели в бистатическом режиме гидролокации при неопределенности оценки пеленга на цель // Гидроакустика. 2017. Вып. 31 (3). С. 9-12.
5. Сташкевич А.П. Акустика моря. - Л: Судостроение, - 1966. - 354 с.
Способ определения текущих координат цели в бистатическом режиме гидролокации, при обнаружении цели гибкой протяженной буксируемой антенной (ГПБА) в режиме бистатической гидролокации, при курсе носителя ГПБА, не совпадающем с базой разнесенных излучающей и приемной систем, включающий излучение гидроакустического сигнала, обнаружение отраженного сигнала от цели ГПБА, определение пеленга и дистанции, а также скорости и курса цели, условно находящейся по левому или правому борту, определение относительной радиальной скорости цели с использованием эффекта Доплера, отличающийся тем, что определяют расчетные значения относительной радиальной скорости цели для условного положения цели по левому и правому борту, определяют модуль разности абсолютных значений радиальной скорости цели, полученной с использованием эффекта Доплера, и абсолютных значений радиальных скоростей цели для условного положения цели по левому и правому борту и при минимальном расхождении между полученными оценками, не превышающем пороговое значение, принимают решение об истинных значениях пеленга и дистанции, а также скорости и курса цели.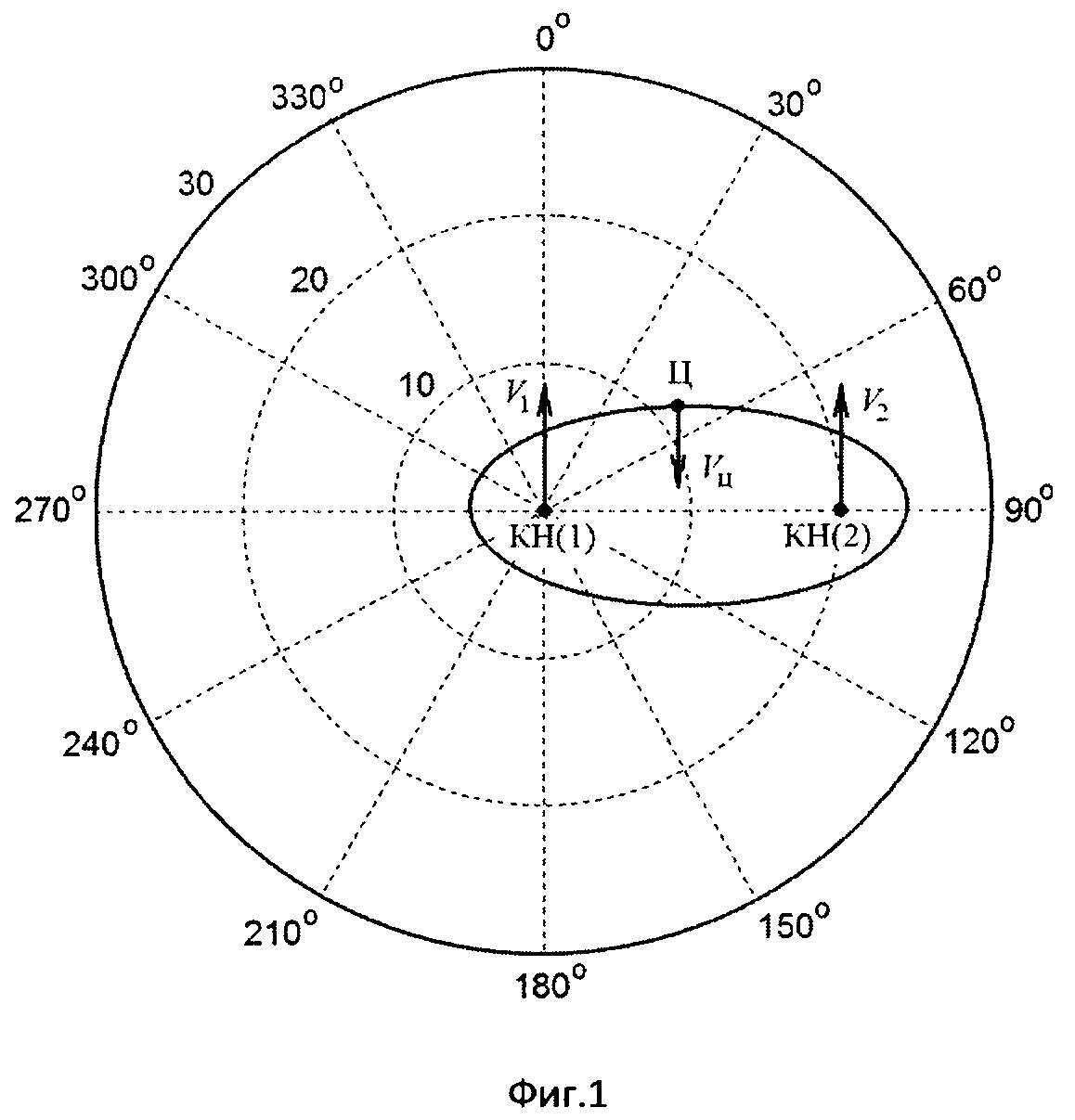
Приемный тракт гидролокатора
Передающий тракт для возбуждения гидроакустической антенны
Система обеспечения гидроакустической совместимости корабельных гидроакустических средств
Способ отображения гидролокационной информации
Способ пассивного определения координат движущегося слабого источника излучения
Способ обработки и классификации гидролокационной информации
Способ оперативного контроля приемного тракта гидроакустического комплекса корабля
Способ многоканальной асинхронной широтно-импульсной модуляции и устройство для его реализации
Способ обнаружения шумящих в море объектов
Способ обнаружения и классификации гидроакустических сигналов шумоизлучения морского объекта
Прозрачный керамический материал и способ его получения
Способ получения солей олова (iv) из солей олова (ii)

