Результат интеллектуальной деятельности: Способ пассивного определения координат движущегося слабого источника излучения
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано в пассивной гидролокации в зоне излучения источника с круговым (сферическим, цилиндрическим) волновым фронтом, а также в атмосферной акустике и пассивной радиолокации.
Для пассивного определения двух, или, в общем случае трех координат источника излучения используют широкоапертурные приемные системы из М разнесенных в пространстве антенн, М≥3, расположенных в пространстве известным образом, а также протяженные антенны большого волнового размера. В локации источников излучения актуальной является задача пассивного определения координат движущегося слабого источника в смешанном, анизотропном поле помех, содержащем рассеянную, фоновую составляющую, а также когерентные составляющие, обусловленные другими, мешающими источниками излучения. Не менее актуальной является задача дальнейшей обработки последовательности измерений в интересах определения параметров движения источника, безопасности, классификации и пр. Мешающее воздействие суммарного поля помехи, в особенности его анизотропных составляющих, в частности, других мешающих источников, приводит к ошибкам оценки координат, особенно дальности, и затрудняет решение актуальных задач наблюдения и автоматического сопровождения объекта, поэтому в плосковолновой гидроакустике широко применяются адаптивные методы подавления поля мешающих источников излучения. Однако в пассивной гидролокации с широкоапертурными приемными системами из разнесенных приемников или антенн они оказываются неприменимы, т.к. они решают задачу определения только одной координаты - направления и только в плоско-волновом поле источника.
Известен способ [1] оптимального обнаружения плосковолновых сигналов с антенной решеткой (АР) из М элементов, основанный на объединении приемных элементов АР в группы (подрешетки), обработке вектора измерений X с выходов устройств формирования характеристик направленности (ФХН) таких групп многомерным фильтром пространственно-временного спектра помехи (ПВФ), квадрировании и интегрировании. Параллельно оценивают произведение вектора измерений  на вектор компенсации Lpf с направления локальной помехи αр и вычитают (режектируют) из предыдущего произведения. Результат этой разности возводят в квадрат и суммируют по частоте с умножением на hsƒ - оптимальную характеристику частотного фильтра для искомого сигнала. Преимуществом этого способа является возможность подавления составляющих поля помехи и повышения отношения сигнал/помеха слабого источника. Недостатки этого способа: способ сформулирован для определения оптимального отклика одного («полезного») плосковолнового сигнала в направлении его прихода, требует измерения каким-то образом матрицы фоновой помехи и специального канала измерения сильной локальной помехи и предварительного определения уровней и направлений на мешающие источники помех. Способ сформулирован для приема сигнала с плоским волновым фронтом, для пассивной локации в зоне Френеля этот метод не может быть использован, тем не менее интересен как вариант решения задачи, аналогичной той, которая решается в данном предложении, а также использованием приема объединения элементов антенны в группы (подрешетки).
на вектор компенсации Lpf с направления локальной помехи αр и вычитают (режектируют) из предыдущего произведения. Результат этой разности возводят в квадрат и суммируют по частоте с умножением на hsƒ - оптимальную характеристику частотного фильтра для искомого сигнала. Преимуществом этого способа является возможность подавления составляющих поля помехи и повышения отношения сигнал/помеха слабого источника. Недостатки этого способа: способ сформулирован для определения оптимального отклика одного («полезного») плосковолнового сигнала в направлении его прихода, требует измерения каким-то образом матрицы фоновой помехи и специального канала измерения сильной локальной помехи и предварительного определения уровней и направлений на мешающие источники помех. Способ сформулирован для приема сигнала с плоским волновым фронтом, для пассивной локации в зоне Френеля этот метод не может быть использован, тем не менее интересен как вариант решения задачи, аналогичной той, которая решается в данном предложении, а также использованием приема объединения элементов антенны в группы (подрешетки).
Известен адаптивный способ обнаружения слабого сигнала антенной из М приемников и определения направления на источник излучения на фоне суммарной помехи, включающей изотропный шум, анизотропные составляющие и локальные источники помехи [2]. Т.к. метод оптимального приема при обнаружении широкополосного сигнала [1] предполагает, что матрица взаимного спектра плотности мощности (ВСПМ) суммарной помехи NƒΣ на выходах приемной системы (ПС) известна или определяется каким-нибудь образом в процессе приема, то в этом способе предлагается использовать ее приближенную оценку. В частности, если обнаруживаемый сигнал слабый по сравнению с суммарной помехой, то ее матрицу ВСПМ NƒΣ в [2] предлагают заменить на оценку ВСПМ суммарного (включающего слабый «полезный сигнал») векторного сигнала Xk с выходов антенны. Для этого на каждом цикле ПФ на каждой частоте ƒk измеряют попарные ВСПМ с выходов всех приемников в виде таблиц размерности М×М и сглаживают все элементы в скользящем временном окне из заданного числа последовательных циклов ПФ, получая таблицы оценок попарных ВСПМ всех элементов ПС  на каждой частоте на момент текущего цикла ПФ. На каждом очередном цикле ПФ векторного сигнала Xk каждую таблицу оценок попарных ВСПМ подвергают известному преобразованию «обращение матрицы» [3]
на каждой частоте на момент текущего цикла ПФ. На каждом очередном цикле ПФ векторного сигнала Xk каждую таблицу оценок попарных ВСПМ подвергают известному преобразованию «обращение матрицы» [3]  и суммируют по индексу mn с умножением каждого элемента на коэффициент компенсации времен прихода сигнала к m-му и n-му приемникам с предполагаемого направления. Затем суммируют по частоте ƒk в пределах заданного диапазона с умножением на коэффициент заданной частотной характеристики hk, повторяют все эти действия для дискретных направлений в секторе обзора и выдают на индикатор. Обнаружение производят по появлению сигнальной отметки (СО) и сравнению ее с заданным порогом, а направление определяют по положению экстремума СО на шкале направлений. Преимуществами этого способа являются уменьшение влияния суммарного поля фонового шума и локальных помех, отсутствие необходимости априорных знаний о свойствах поля суммарной помехи и расположении локальных помех, причем чем сильнее мешающий источник, тем глубже он подавляется. Недостатками способа являются следующие: способ применим для приема сигнала от неподвижного источника и приемной системы и предполагает статическое интегрирование, которое при переменных координатах источников и приемника приводит к ошибкам их оценок из-за инерционности накопителя, что снижает эффективность решения последующих задач: трассового анализа, определения параметров движения объекта, классификации и пр. Способ может быть использован только для определения одной координаты: угла прихода сигнала с плоским волновым фронтом, в то время как пассивная локация в принципе работает в зоне со сферическим или цилиндрическим фронтом и ее целью является определение и направления и дальности (в общем случае также и угла места). Для пассивной локации этот метод не может быть использован, т.к. не предназначен для работы с криволинейным фронтом поля источника и определения всех координат, тем не менее он содержит полезный способ приближенной фильтрации когерентной составляющей помехи.
и суммируют по индексу mn с умножением каждого элемента на коэффициент компенсации времен прихода сигнала к m-му и n-му приемникам с предполагаемого направления. Затем суммируют по частоте ƒk в пределах заданного диапазона с умножением на коэффициент заданной частотной характеристики hk, повторяют все эти действия для дискретных направлений в секторе обзора и выдают на индикатор. Обнаружение производят по появлению сигнальной отметки (СО) и сравнению ее с заданным порогом, а направление определяют по положению экстремума СО на шкале направлений. Преимуществами этого способа являются уменьшение влияния суммарного поля фонового шума и локальных помех, отсутствие необходимости априорных знаний о свойствах поля суммарной помехи и расположении локальных помех, причем чем сильнее мешающий источник, тем глубже он подавляется. Недостатками способа являются следующие: способ применим для приема сигнала от неподвижного источника и приемной системы и предполагает статическое интегрирование, которое при переменных координатах источников и приемника приводит к ошибкам их оценок из-за инерционности накопителя, что снижает эффективность решения последующих задач: трассового анализа, определения параметров движения объекта, классификации и пр. Способ может быть использован только для определения одной координаты: угла прихода сигнала с плоским волновым фронтом, в то время как пассивная локация в принципе работает в зоне со сферическим или цилиндрическим фронтом и ее целью является определение и направления и дальности (в общем случае также и угла места). Для пассивной локации этот метод не может быть использован, т.к. не предназначен для работы с криволинейным фронтом поля источника и определения всех координат, тем не менее он содержит полезный способ приближенной фильтрации когерентной составляющей помехи.
Известен «Способ пассивного определения координат источников излучения» [4], содержащий прием сигналов с круговым волновым фронтом приемной системой (ПС) из М антенн (М≥3), расположенных в пространстве известным образом, предварительную обработку, двухкоординатный индикатор с координатной сеткой размером P×Q, с интервалом между ее узлами δα и δD соответственно. В каждом pq-м узле координатной сетки определяют суммарные по индексу mn значения попарных взаимно-корреляционных функций Cmn(τmn(αp, Dq)) всех mn-х пар антенн, накопленные за заданное время Тн и определяют координаты максимума сигнальной отметки на индикаторе α и D по ее положению на координатных шкалах индикатора. Недостатком данного способа является то, что в нем используется статическое накопление, жестко привязанное к координатной сетке индикатора и при движущемся источнике и/или носителе приемной системы и большом времени накопления Тн возникают значительные динамические ошибки определения координат из-за инерционности накопителя, зависящие от скорости относительного перемещения источника и приемников. Другим недостатком является искажение формы сигнальной отметки на индикаторе и смещение положения ее максимума в присутствии сильных мешающих источников излучения.
Наиболее близким по совокупности общих признаков к предлагаемому способу является «Способ пассивного определения координат движущегося источника излучения» [5], содержащий: приемную систему (ПС) с М антеннами, М≥3, расположенными в пространстве известным образом, предварительную обработку, включающую: преобразование акустических сигналов в электрические, синхронную дискретизацию, цифровое преобразование, циклическое дискретное преобразование выборок сигналов антенн объемом NПФ в массивы спектральных частотных отсчетов Xm(ƒk) в полосе приема ƒн≤ƒk≤ƒв (преобразование Фурье), наблюдение сигнальных отметок (СО) источников излучения в заданном секторе углов и интервале дальностей, включающее наведение визира на СО по координатной сетке «направление-дальность» индикатора обзора (например, по известному способу [4] и дискриминацию (различение отклонения от опорного уровня по знаку и величине) текущих оценок координат от истинного положения источника. При дискриминации измеряемых параметров αs, Ds сигнал на выходе дискриминаторов является функцией (по αs в некоторых пределах линейной, по Ds - существенно нелинейной) величины отклонения текущего направления αt, от αs и дальности Dt от Ds с обратной связью на фокусирование ПС по направлению и дальности и далее динамическое сглаживание до требуемого времени осреднения. Текущие оценки  ,
,  определяют корректируя αопi, Dопi на оценки величин δαi, δDi соответственно, а текущие координаты источника излучения αS(ti), DS(ti) на момент i-го цикла и прогноз опорных значений αопi+1, Dопi+1 на следующий (i+1)-й цикл определяют по результатам динамического сглаживания [6] последовательностей оценок координат на предыдущих циклах, включая i-й цикл. Ввиду того, что сечения СО: по направлению симметричное, а по дальности асимметричное [7], выходные характеристики дискриминаторов имеют вид: по направлению - антисимметрична, а по дальности - асимметрична, в способе-прототипе описаны способы дискриминации отклонений по направлению и по дальности. Метод дискриминации отклонений по направлению δαi: на каждом i-м цикле ПФ определяют комплексные взаимные спектры плотности мощности (ВСПМ) сигналов всех пар антенн и суммируют по частоте ƒk мнимые части ВСПМ каждой mn-й пары антенн в полосе приема [ƒн, ƒв] с умножением каждого слагаемого на коэффициент частотной характеристики hk, на частоту ƒk и на коэффициент компенсации разности времен прихода сигнала от ОТ к центрам антенн каждой mn-й пары ekmni=exp(-j2πƒk τmni(αопi, Dопi, rm, rn)), определяя τmni по формулам тригонометрии с использованием координат ОТ i-го шага и координат центров антенн rm, rn. В результате получают для каждой mn-й пары суммарные величины c1mnj i-го цикла ПФ на i-м шаге, затем суммируют по частоте ƒk вещественные части ВСПМ с умножением каждого слагаемого на hk, на коэффициент компенсации ekmni и на квадрат частоты
определяют корректируя αопi, Dопi на оценки величин δαi, δDi соответственно, а текущие координаты источника излучения αS(ti), DS(ti) на момент i-го цикла и прогноз опорных значений αопi+1, Dопi+1 на следующий (i+1)-й цикл определяют по результатам динамического сглаживания [6] последовательностей оценок координат на предыдущих циклах, включая i-й цикл. Ввиду того, что сечения СО: по направлению симметричное, а по дальности асимметричное [7], выходные характеристики дискриминаторов имеют вид: по направлению - антисимметрична, а по дальности - асимметрична, в способе-прототипе описаны способы дискриминации отклонений по направлению и по дальности. Метод дискриминации отклонений по направлению δαi: на каждом i-м цикле ПФ определяют комплексные взаимные спектры плотности мощности (ВСПМ) сигналов всех пар антенн и суммируют по частоте ƒk мнимые части ВСПМ каждой mn-й пары антенн в полосе приема [ƒн, ƒв] с умножением каждого слагаемого на коэффициент частотной характеристики hk, на частоту ƒk и на коэффициент компенсации разности времен прихода сигнала от ОТ к центрам антенн каждой mn-й пары ekmni=exp(-j2πƒk τmni(αопi, Dопi, rm, rn)), определяя τmni по формулам тригонометрии с использованием координат ОТ i-го шага и координат центров антенн rm, rn. В результате получают для каждой mn-й пары суммарные величины c1mnj i-го цикла ПФ на i-м шаге, затем суммируют по частоте ƒk вещественные части ВСПМ с умножением каждого слагаемого на hk, на коэффициент компенсации ekmni и на квадрат частоты  получая для каждой пары суммарную величину c2mni, затем определяют отклонение по α, а именно δαi, суммируя по индексу mn величины c1mni с весовыми коэффициентами wαmni, равными производной по α разности времен распространения τmni(αопi, Dопi), получая величину c1i, которую делят на сумму по индексу mn величин c2mni с тем же весовым коэффициентом в квадрате
получая для каждой пары суммарную величину c2mni, затем определяют отклонение по α, а именно δαi, суммируя по индексу mn величины c1mni с весовыми коэффициентами wαmni, равными производной по α разности времен распространения τmni(αопi, Dопi), получая величину c1i, которую делят на сумму по индексу mn величин c2mni с тем же весовым коэффициентом в квадрате  , получая c2i. Затем выполняют осреднение оценок отклонения δαi по j=1, 2, … J циклам ПФ, получая малоосредненную оценку отклонения δαj. Метод дискриминации отклонений по дальности δDi предлагается следующим: используют Мп=(М2-М)/2 нечетных попарных взаимно-корреляционных функций (НВКФ) сигналов антенн
, получая c2i. Затем выполняют осреднение оценок отклонения δαi по j=1, 2, … J циклам ПФ, получая малоосредненную оценку отклонения δαj. Метод дискриминации отклонений по дальности δDi предлагается следующим: используют Мп=(М2-М)/2 нечетных попарных взаимно-корреляционных функций (НВКФ) сигналов антенн  на дискретной шкале задержек τ, для чего комплексные частотные элементы ВСПМ каждой mn-й пары антенн j-го цикла умножают на коэффициент заданной частотной характеристики hk (например, эккартовской [1, с. 76-79], прямоугольной, выбеливающей и др., по выбору разработчика) и на частоту ƒk, выполняют их осреднение за J циклов ПФ (отдельно для реальной и мнимой части), затем сканируют величину D=Dp по р=±1, 2, … в окрестностях Dопi, определяя в каждой точке сканирования значения τmni(αопi, Dp), весовые коэффициенты wDmnip, равные производной ∂τmni(αопi, Dp)/∂D. Затем определяют значение zi(D) в каждой точке сканирования путем считывания значений
на дискретной шкале задержек τ, для чего комплексные частотные элементы ВСПМ каждой mn-й пары антенн j-го цикла умножают на коэффициент заданной частотной характеристики hk (например, эккартовской [1, с. 76-79], прямоугольной, выбеливающей и др., по выбору разработчика) и на частоту ƒk, выполняют их осреднение за J циклов ПФ (отдельно для реальной и мнимой части), затем сканируют величину D=Dp по р=±1, 2, … в окрестностях Dопi, определяя в каждой точке сканирования значения τmni(αопi, Dp), весовые коэффициенты wDmnip, равные производной ∂τmni(αопi, Dp)/∂D. Затем определяют значение zi(D) в каждой точке сканирования путем считывания значений  в точках τ=τmni(αопi, Dp), и суммирования их по индексу mn в каждой точке Dp с весовым коэффициентом wDmnip, причем, если значения τmni(αопi, Dp) не совпадают с дискретными значениями τq шкалы временных задержек, используют интерполяцию
в точках τ=τmni(αопi, Dp), и суммирования их по индексу mn в каждой точке Dp с весовым коэффициентом wDmnip, причем, если значения τmni(αопi, Dp) не совпадают с дискретными значениями τq шкалы временных задержек, используют интерполяцию  между дискретными значениями τq, находят положение нулевого значения zi(D) на шкале D, а отклонение δDi определяют по отстоянию нулевой точки z(D)=0 от опорного значения Dопi. Определив оценки текущих координат источника излучения
между дискретными значениями τq, находят положение нулевого значения zi(D) на шкале D, а отклонение δDi определяют по отстоянию нулевой точки z(D)=0 от опорного значения Dопi. Определив оценки текущих координат источника излучения  на момент i-го цикла и прогноз опорных значений αопi+1, Dопi+1 на следующий (i+1)-й цикл, назначают их координатами опорной точки (ОТ) на следующий цикл и повторяют изложенную схему, а фокусировка ПС в опорную точку является обратной связью следящей системы. Преимуществом данного способа является определение координат - направления и дальности движущегося объекта в зоне Френеля поля источника в динамическом режиме слежения и осреднения оценок. Недостатком этого способа является смещение оценки измеряемых параметров (направления и, особенно, дальности) при наличии других источников излучения и анизотропных составляющих поля помехи из-за интерференции полей излучателей на приемниках и антеннах ПС.
на момент i-го цикла и прогноз опорных значений αопi+1, Dопi+1 на следующий (i+1)-й цикл, назначают их координатами опорной точки (ОТ) на следующий цикл и повторяют изложенную схему, а фокусировка ПС в опорную точку является обратной связью следящей системы. Преимуществом данного способа является определение координат - направления и дальности движущегося объекта в зоне Френеля поля источника в динамическом режиме слежения и осреднения оценок. Недостатком этого способа является смещение оценки измеряемых параметров (направления и, особенно, дальности) при наличии других источников излучения и анизотропных составляющих поля помехи из-за интерференции полей излучателей на приемниках и антеннах ПС.
Задачей изобретения является пассивное следящее определение координат движущегося слабого источника излучения М-антенной приемной системой в зоне Френеля, в первую очередь дальности, с подавлением влияния суммарного поля помехи, в том числе его анизотропных составляющих и локальных мешающих источников.
Техническим результатом предлагаемого изобретения является повышение точности определения координат движущегося источника излучения в присутствии когерентных составляющих помехи и эффективности решения последующих задач, таких, как определение параметров движения источника и классификации, обеспечение безопасности и др. благодаря устранению составляющих смещения оценки координат, зависящих от наличия анизотропных помех и мешающих источников излучения.
Для обеспечения указанного технического результата в способ пассивного определения координат движущегося источника излучения, содержащий прием сигналов М антеннами, М≥3, расположенными в пространстве известным образом, предварительную обработку (ПО) в каналах приема, включающую преобразование акустических сигналов в электрические, синхронную дискретизацию, цифровое преобразование, циклическое (по i) дискретное преобразование Фурье (ПФ) временных выборок сигналов антенн объемом Nпф в массивы спектральных комплексных частотных отсчетов Xmi(ƒk) в полосе приема ƒн≤ƒk≤ƒв, k=kн÷kв, наблюдение сигнальных отметок (СО) источников излучения в заданном секторе углов и интервале дальностей, например по способу [4], включающее индикацию и наведение визира на СО источников излучения и в точку предполагаемого расположения слабого источника - «опорную точку» (ОТ), фазирование антенн в направлениях от их центров на ОТ, циклическое измерение текущих координат источника излучения αs(tj), Ds(tj) на момент tj и прогноз опорных значений αопj+1, Dопj+1 на следующий (j+1)-й шаг по результатам динамического сглаживания полученных оценок координат, введены новые признаки, а именно: на каждом j-ом цикле измерений, включающем Н циклов ПФ сигналов приемников ПС, определяют величины отклонения δαj, δDj текущих координат ОТ αот(tj), Dот(tj) от искомых текущих координат источника αs(tj), Ds(tj), используя последовательность Н предыдущих циклов ПФ сигналов Xm(i-j)(ƒk) с выходов М фазированных антенн (i - номер очередного цикла ПФ, i=0, 1, 2, … Н, m - номер антенны, k - номер частотного элемента ПФ, kн<k<kв, kн,kв - номера граничных элементов ПФ в диапазоне приема, kв-kн=К, ƒk - дискретная частота, соответствующая k-му элементу ПФ,), измеряя на каждом i-м цикле ПФ попарные взаимные спектры плотности мощности (ВСПМ) Gik=[gmnik], получая на каждой частоте ƒk таблицы элементов ВСПМ выходных сигналов всех пар антенн, осредняют элементы этих таблиц по Н предыдущим циклам ПФ  и применяют к ним известное [3] преобразование «обращение матрицы», получая новые таблицы обращенных измерений
и применяют к ним известное [3] преобразование «обращение матрицы», получая новые таблицы обращенных измерений  Величину отклонения по направлению δαj определяют, путем измерения величины дискриминации
Величину отклонения по направлению δαj определяют, путем измерения величины дискриминации  и нормирующей величины
и нормирующей величины  а величину отклонения по дальности δDj, определяют путем нахождения нулевого значения величины дискриминации по дальности
а величину отклонения по дальности δDj, определяют путем нахождения нулевого значения величины дискриминации по дальности  на шкале дальностей D, используя таблицы обращенных измерений Bkj и расчеты времен распространения сигнала от ОТ к центрам антенн tотmj, разностей времен распространения сигнала от ОТ к m-й и n-й антеннам τmnj и весовых коэффициентов
на шкале дальностей D, используя таблицы обращенных измерений Bkj и расчеты времен распространения сигнала от ОТ к центрам антенн tотmj, разностей времен распространения сигнала от ОТ к m-й и n-й антеннам τmnj и весовых коэффициентов  и
и  учитывающих геометрию системы «источник-ПС», затем корректируют αопj, Dопj на величину δαj, δDj соответственно, а текущие оценки координат источника излучения
учитывающих геометрию системы «источник-ПС», затем корректируют αопj, Dопj на величину δαj, δDj соответственно, а текущие оценки координат источника излучения  ,
,  на момент tj и прогноз опорных значений αоп(j+1), Dоп(j+1) на следующий (j+1)-й шаг определяют по результатам динамического сглаживания последовательности оценок координат [6].
на момент tj и прогноз опорных значений αоп(j+1), Dоп(j+1) на следующий (j+1)-й шаг определяют по результатам динамического сглаживания последовательности оценок координат [6].
Элементы ВСПМ таблиц Gik=[gmnik] на частоте ƒk могут быть получены путем попарного перемножения k-х составляющих Фурье-изображения выходных сигналов сфокусированных m-ой и n-ой антенн  и сглаживания (отдельно мнимые и вещественные части элементов) за заданное разработчиком (исходя из заданных параметров скорости взаимного перемещения источника и ПС) число Н циклов ПФ (полученных в моменты ti-J, …, ti-2, ti-1, ti) известными методами сглаживания последовательностей: «в скользящем окне», рекурррентными и др. методами [8].
и сглаживания (отдельно мнимые и вещественные части элементов) за заданное разработчиком (исходя из заданных параметров скорости взаимного перемещения источника и ПС) число Н циклов ПФ (полученных в моменты ti-J, …, ti-2, ti-1, ti) известными методами сглаживания последовательностей: «в скользящем окне», рекурррентными и др. методами [8].
Таблица оценок попарных ВСПМ Gik=[gmnik] может быть сформирована из (М2-М)/2 попарных значений произведений выходных сигналов xmik каждой m-ой антенны с сопряженными выходными сигналами  каждой n-й антенны, при m,n=1…М, но m<n, после чего каждую полученную треугольную таблицу
каждой n-й антенны, при m,n=1…М, но m<n, после чего каждую полученную треугольную таблицу  преобразуют в квадратную таблицу Gjk=[gmnjk] размерности М×М путем заполнения ячеек правого верхнего треугольника таблицы Gjk элементами таблицы
преобразуют в квадратную таблицу Gjk=[gmnjk] размерности М×М путем заполнения ячеек правого верхнего треугольника таблицы Gjk элементами таблицы  а ячеек нижнего левого треугольника сопряженными значениями:
а ячеек нижнего левого треугольника сопряженными значениями:  а диагональные элементы gmmjk равны квадратам модуля выходных сигналов m-х антенн, затем преобразуют каждую таблицу Gjk методом обращения
а диагональные элементы gmmjk равны квадратам модуля выходных сигналов m-х антенн, затем преобразуют каждую таблицу Gjk методом обращения  где черта сверху - знак осреднения, (
где черта сверху - знак осреднения, ( ) - знак дефиниции.
) - знак дефиниции.
Для корректировки координат ОТ и определения величин отклонения текущих оценок от искомого направления и дальности до источника, формируют таблицы М×М разностей времен распространения сигнала от ОТ tmотj и tnотj к центрам m-й и n-й антенн τmni=tmотi-tnотi (с учетом того, что τnmj=-τmnj) и таблицы весовых коэффициентов для определения направления  и
и  используя текущие координаты центров антенн rmi и ОТ и скорость распространения звука.
используя текущие координаты центров антенн rmi и ОТ и скорость распространения звука.
Величина отклонения направления δαj может быть определена путем нахождения дискриминационной величины  и деления ее на нормирующую величину
и деления ее на нормирующую величину  .
.
Дискриминационную величину  можно определить путем суммирования по индексу mn элементов каждой k-й таблицы обращенных элементов ВСПМ Bjk=[bmnjk] с умножением каждого слагаемого на свой mn-й весовой коэффициент для направления
можно определить путем суммирования по индексу mn элементов каждой k-й таблицы обращенных элементов ВСПМ Bjk=[bmnjk] с умножением каждого слагаемого на свой mn-й весовой коэффициент для направления  и на коэффициент компенсации разности времен прихода сигнала к m-й и n-й антеннам τmnj, равный emnj=exp(-j2πƒkτmnj), а затем суммирования по частоте ƒk (т.е. по k) с умножением каждого слагаемого на коэффициент частотной характеристики hk и на частоту ƒk.
и на коэффициент компенсации разности времен прихода сигнала к m-й и n-й антеннам τmnj, равный emnj=exp(-j2πƒkτmnj), а затем суммирования по частоте ƒk (т.е. по k) с умножением каждого слагаемого на коэффициент частотной характеристики hk и на частоту ƒk.
Нормирующую величину  можно определить путем суммирования по индексу mn элементов каждой k-й таблицы обращенных элементов ВСПМ Bjk=[bmnjk] с умножением каждого слагаемого на квадрат mn-го весового коэффициента
можно определить путем суммирования по индексу mn элементов каждой k-й таблицы обращенных элементов ВСПМ Bjk=[bmnjk] с умножением каждого слагаемого на квадрат mn-го весового коэффициента  и на коэффициент компенсации τmnj, равный emnj-exp(-j2πƒkτmnj), а затем суммирования по частоте ƒk с умножением каждого слагаемого на коэффициент частотной характеристики hk и на квадрат частоты ƒk.
и на коэффициент компенсации τmnj, равный emnj-exp(-j2πƒkτmnj), а затем суммирования по частоте ƒk с умножением каждого слагаемого на коэффициент частотной характеристики hk и на квадрат частоты ƒk.
Для определения величины отклонения δDj текущей оценки дальности до ОТ  от искомой Dsj можно использовать сканирование величины D=Dp=Dопj±рΔD по р=1, 2, … с заданным шагом ΔD в окрестностях Dопj при фиксированном
от искомой Dsj можно использовать сканирование величины D=Dp=Dопj±рΔD по р=1, 2, … с заданным шагом ΔD в окрестностях Dопj при фиксированном  рассчитывая в каждой точке сканирования р значения τmnp(αопj, Dp), весовые коэффициенты
рассчитывая в каждой точке сканирования р значения τmnp(αопj, Dp), весовые коэффициенты  и значение zpj(Dpj), для чего суммируют по индексу mn элементы каждой k-й таблицы обращенных элементов ВСПМ Bjk=[bmnjk] с умножением каждого слагаемого на свой mn-й весовой коэффициент для дальности
и значение zpj(Dpj), для чего суммируют по индексу mn элементы каждой k-й таблицы обращенных элементов ВСПМ Bjk=[bmnjk] с умножением каждого слагаемого на свой mn-й весовой коэффициент для дальности  и на коэффициент компенсации τmnp, равный emnp=exp(-j2πƒkτmnp), а затем суммируют по частоте ƒk (т.е. по k) с умножением каждого слагаемого на коэффициент частотной характеристики hk и на частоту ƒk. Сканируя таким образом по р, находят положение нулевого значения zpj(Dpj) на шкале D (используя интерполяцию), а отклонение δDj определяют по отстоянию нулевой точки zpj(Dpj)=0 от опорного значения Dопj.
и на коэффициент компенсации τmnp, равный emnp=exp(-j2πƒkτmnp), а затем суммируют по частоте ƒk (т.е. по k) с умножением каждого слагаемого на коэффициент частотной характеристики hk и на частоту ƒk. Сканируя таким образом по р, находят положение нулевого значения zpj(Dpj) на шкале D (используя интерполяцию), а отклонение δDj определяют по отстоянию нулевой точки zpj(Dpj)=0 от опорного значения Dопj.
Затем можно корректировать координаты опорной точки αопj, Dопj на величину δαj, δDj соответственно:  и использовать оценки
и использовать оценки  ,
,  как последнее измерение последовательности предыдущих измерений для динамического сглаживания, применяя какой-либо из известных методов динамического сглаживания последовательностей [2], определяя таким образом текущие сглаженные оценки координат источника излучения
как последнее измерение последовательности предыдущих измерений для динамического сглаживания, применяя какой-либо из известных методов динамического сглаживания последовательностей [2], определяя таким образом текущие сглаженные оценки координат источника излучения  ,
,  на момент tj и прогноз опорных значений αоп(j+1), Dоп(j+1) на следующий (j+1)-й цикл измерений которые используют для нового фазирования антенн, осуществляя таким образом функцию обратной связи следящего измерения координат движущегося слабого источника в поле, содержащем сильные мешающие когерентные составляющие.
на момент tj и прогноз опорных значений αоп(j+1), Dоп(j+1) на следующий (j+1)-й цикл измерений которые используют для нового фазирования антенн, осуществляя таким образом функцию обратной связи следящего измерения координат движущегося слабого источника в поле, содержащем сильные мешающие когерентные составляющие.
Введение новых признаков позволяет повысить точность определения координат движущегося слабого источника излучения пассивной приемной системой, что важно также для эффективности решения последующих задач, таких как определение параметров движения источника, классификации, обеспечения безопасности плавания и др., благодаря подавлению составляющих непредсказуемого смещения оценок координат, зависящих от наличия анизотропных помех и мешающих источников излучения и их взаимного расположения с ПС.
Новизна предлагаемого решения по нашему мнению заключается в том, что каждую из М антенн широкоапертурной ПС фазируют в точку предполагаемого расположения интересующего источника и в обработку выходных сигналов антенн вводят операции приближенной пространственно-временной фильтрации (ПВФ) следующим образом. Известный из плосковолновой акустики оптимальный метод определения координаты θ (в нашем случае - направления α и дальности D) источника излучения можно представить как [1, с. 137]:

где первое слагаемое - опорное значение (точка «наведения» - ОТ), второе слагаемое - поправка δθ к θоп, определяемая из измерений поля X(ti, θ-θоп), LX(θ) - функция правдоподобия выборки X(θ), содержащая информацию об искомой координате θ. Можно показать [1], что числитель и знаменатель второго слагаемого может быть представлен в виде:

где Gk - матрица размерности М×М взаимных спектральных плотностей мощности (ВСПМ) на частоте ƒk суммарной составляющей шума и локальных и других когерентных помех на выходах антенн ПС без сигнала искомого источника, поэтому в общем случае неизвестная, Vk - фокусирующая квадратная матрица, диагональные элементы которой - коэффициенты, компенсирующие время распространения сигнала τmn к центрам антенн ПС, а остальные равны нулю, W - весовая матрица, учитывающая геометрию системы ПС - источник, элементы которой равны производной ∂τmn/∂θ.
Поскольку ВСПМ помех без «полезного» сигнала неизвестны, применяют [2] приближенные методы измерения Gk, в частности, если уровень полезного (искомого) сигнала мал, а уровни когерентных составляющих локальных помех больше фонового шума, и время накопления Т достаточно велико (актуальная ситуация в практике), то оценку таблицы ВСПМ выходного векторного процесса  можно приближенно считать равной ВСПМ суммы составляющей шума и локальных помех, т.е.
можно приближенно считать равной ВСПМ суммы составляющей шума и локальных помех, т.е.  . Тогда выражения (2) можно представить эквивалентным образом как:
. Тогда выражения (2) можно представить эквивалентным образом как:

где bmnk - элементы таблицы М×М, обратной таблице оценок ВСПМ суммарного процесса с выходов антенн ПС  , m,n = 1, …, М, - номера антенн ПС; emnk=exp(-j2πƒτmn(αоп, Dоп, rm, rn)) - коэффициент компенсации разности времен распространения сигнала τmn от точки αоп, Dоп к центрам m-й и n-й антенн с координатами rm, rn, соответственно;
, m,n = 1, …, М, - номера антенн ПС; emnk=exp(-j2πƒτmn(αоп, Dоп, rm, rn)) - коэффициент компенсации разности времен распространения сигнала τmn от точки αоп, Dоп к центрам m-й и n-й антенн с координатами rm, rn, соответственно;  - весовой коэффициент, равный
- весовой коэффициент, равный  , где θ в нашем случае - направление α или дальность D.
, где θ в нашем случае - направление α или дальность D.
Выражения (3) реализуют процедуры приближенно оптимальной обработки по выражениям (1, 2): пространственно-временную фильтрацию, фокусировку, попарное перемножение сигналов антенн, суммирование, временное и частотное осреднение. С точки зрения физики ПВФ принятого векторного процесса Xtk в виде  с одной стороны обеспечивает подавление всех источников когерентного излучения (в том числе и «полезного» сигнала, ожидаемого в точке αоп, Dоп), с другой стороны, благодаря фокусировке emnk (αоп, Dоп), сигнал источника, если он находится в этой точке, становится значимым на фоне подавленных других источников, а степень его дискриминации, благодаря ПВФ соседних направлений, существенно увеличивается по сравнению с традиционной обработкой (по прототипу), тем самым обеспечивая повышение точности определения координат и разрешающей способности как по направлению, так и по дальности.
с одной стороны обеспечивает подавление всех источников когерентного излучения (в том числе и «полезного» сигнала, ожидаемого в точке αоп, Dоп), с другой стороны, благодаря фокусировке emnk (αоп, Dоп), сигнал источника, если он находится в этой точке, становится значимым на фоне подавленных других источников, а степень его дискриминации, благодаря ПВФ соседних направлений, существенно увеличивается по сравнению с традиционной обработкой (по прототипу), тем самым обеспечивая повышение точности определения координат и разрешающей способности как по направлению, так и по дальности.
Сущность предполагаемого изобретения поясняется фигурами 1÷3.
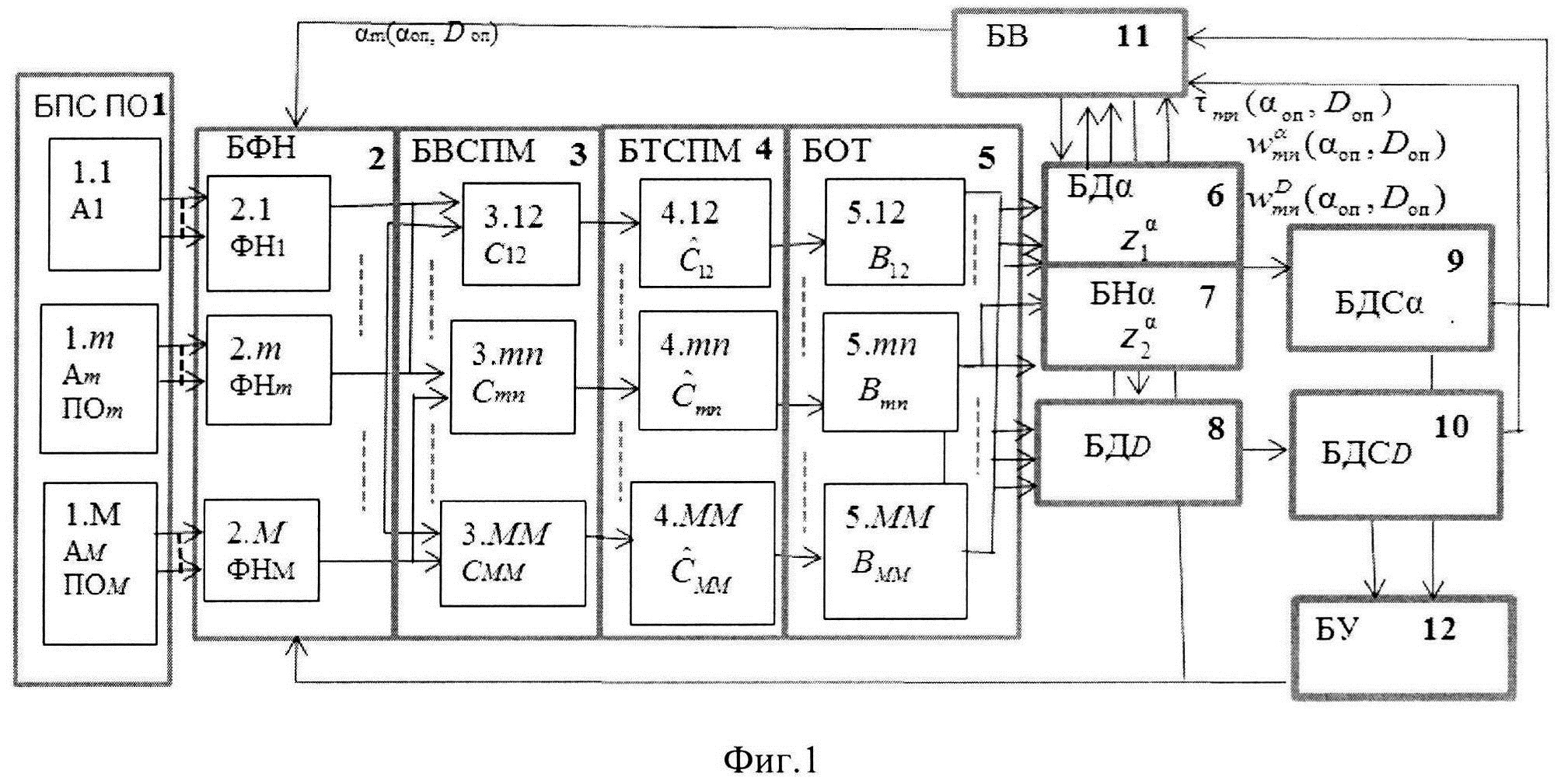
На фиг. 1 изображена схема устройства, реализующего предлагаемый способ определения координат слабого движущегося источника, на фиг. 2 и 3 приведены результаты численного эксперимента, иллюстрирующие примеры сопровождающего определения двух координат слабого движущегося источника (СИ) на фоне сильного мешающего источника когерентного излучения (МИ) способом - прототипом и предлагаемым способом при двух соотношениях уровня МИ и СИ.
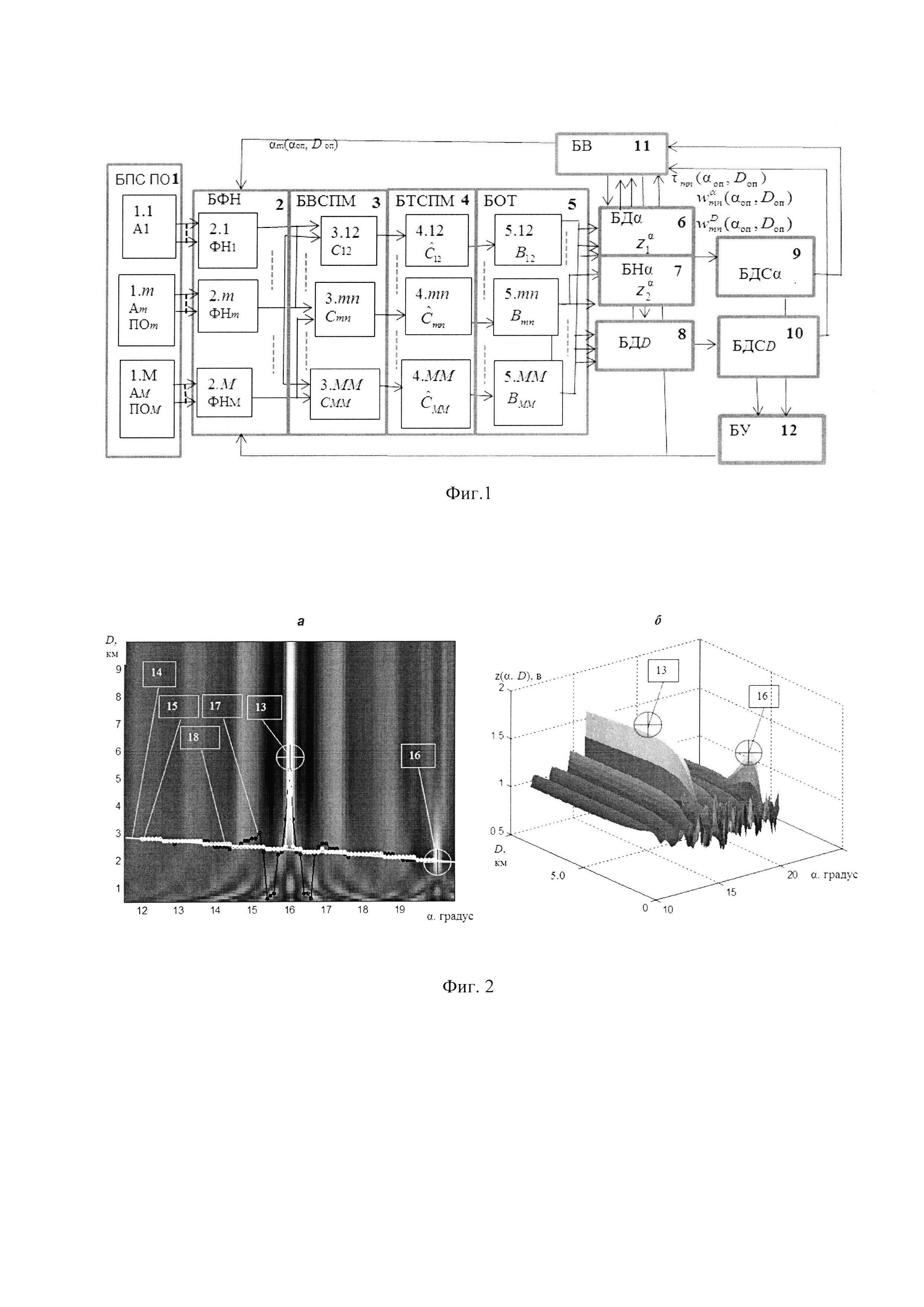
На фиг. 1: 1 БПС ПО - блок приемной системы с модулями предварительной обработки сигналов М антенн А1÷Am, m=1, …, М; 2 БФН - блок формирования направленности антенн; 3 БВСПМ - блок оценки попарных ВСПМ всех антенн Cmnk; 4 БТСПМ - блок накопления ВСПМ и формирования квадратных таблиц спектров плотности мощности:  ; 5 БОТ - блок преобразования (обращения) таблиц ВСПМ:
; 5 БОТ - блок преобразования (обращения) таблиц ВСПМ:  ; 6 БДα - блок суммирования в канале дискриминации направления
; 6 БДα - блок суммирования в канале дискриминации направления  7 БНα - блок суммирования в канале нормирования
7 БНα - блок суммирования в канале нормирования  ; 8 БДD - блок суммирования в канале дискриминации дальности
; 8 БДD - блок суммирования в канале дискриминации дальности  ; 9 БДСα - блок динамического сглаживания последовательности оценок направления; 10 БДСD - блок динамического сглаживания последовательности оценок дальности (9 и 10 - программируемые процессоры); 11 БВ - блок вычислителя (программируемый процессор); 12 БУ - блок управления (программируемый контроллер).
; 9 БДСα - блок динамического сглаживания последовательности оценок направления; 10 БДСD - блок динамического сглаживания последовательности оценок дальности (9 и 10 - программируемые процессоры); 11 БВ - блок вычислителя (программируемый процессор); 12 БУ - блок управления (программируемый контроллер).
На Фиг. 2 и 3: а - индикаторная картина по способу [4] в координатах: направление (ось х) - дальность (ось у), б - индикаторный массив а в аксонометрии; 13 - максимум сигнальной отметки МИ на индикаторной картине,; 14 - истинная траектория СИ от точки 15 к точке 16; 17 - траектория слабого источника по оценкам координат способом-прототипом [5]; 18 - траектория слабого источника по оценкам координат предлагаемым способом.
Реализацию предлагаемого способа пассивного определения координат источника гидроакустического излучения удобно показать на примере работы устройства, схема которого изображена на фиг. 1. Приемная система ПС из М антенн (А1÷АМ) по Nпр элементов каждая принимает акустические сигналы, содержащие распределенные шумы акватории и шумы локальных источников излучения, преобразует их в электрические сигналы и подвергает предварительной обработке в блоке БПС ПО 1, включающей: синхронную дискретизацию, цифровое преобразование, циклическое дискретное преобразование Фурье в полосе приема ƒн≤ƒk≤ƒв. Количество сигнальных выходов БПС ПО М×Nпр, в частотной области с К частотными элементами циклического ПФ в заданной полосе приема. Эти сигналы поступают на входы блока БФН 2 формирования направленности (ФН) каждой антенны на точку αm(αоп, Dоп), координаты которой в начале поступают из блока управления БУ 12 как точки наведения наблюдателем, использующим индикатор по способу [4], представленного на фиг. 2 и 3, и/или другие данные, а затем циклически поступают из вычислителя БВ 11, решающего задачу определения направления от центра каждой антенны на ОТ для данного цикла измерения координат в соответствии с результатами динамического сглаживания в блоках БДСα 9 и БДСD 10 последовательностей измерений на предыдущих циклах. На выходе БФН 2 и входе ВСПМ 3 имеет место М суммарных сигналов антенн по К комплексных частотных элементов ПФ.
В блоке БВСПМ 3 выполняются измерения (М2 - М)/2 попарных взаимных спектров плотности мощности (ВСПМ) сигналов антенн Cmnk на каждой частоте ƒk. Объем данных на выходе БВСПМ 3: К треугольных таблиц по (М2 - М)/2 элементов ВСПМ каждая. В блоке БТСПМ 4 значения ВСПМ осредняются по Н циклам ПФ и формируются в квадратные таблицы М×М для каждой частоты ƒk, которые затем подвергаются известному преобразованию обращения в блоке БОТ 5, получая таблицы Bmnk (специализированные программируемые модули для преобразования обращения выпускаются промышленностью). В блоке БДα 6 выполняется сначала суммирование элементов каждой таблицы Bmnk по индексу mn с умножением каждого слагаемого на коэффициент компенсации разности времен прихода сигнала к центрам m-й и n-й антенн τmn и на весовой коэффициент  , которые поступают из блока БВ 11 - вычислителя (программируемый процессор), затем выполняют суммирование по k с умножением на коэффициент частотной характеристики и на частоту ƒk, получая дискриминационную величину
, которые поступают из блока БВ 11 - вычислителя (программируемый процессор), затем выполняют суммирование по k с умножением на коэффициент частотной характеристики и на частоту ƒk, получая дискриминационную величину  В блоке БНα 7 получают нормирующую величину
В блоке БНα 7 получают нормирующую величину  , суммируя аналогичным образом элементы Bmnk по индексу mn, но с умножением слагаемых на квадрат весового коэффициента
, суммируя аналогичным образом элементы Bmnk по индексу mn, но с умножением слагаемых на квадрат весового коэффициента  и затем по k, но с умножением слагаемых на квадрат частоты. В результате деления
и затем по k, но с умножением слагаемых на квадрат частоты. В результате деления  получают очередную оценку величины отклонения направления на опорную точку данного цикла от фактического, корректируют на эту величину опорное направление и получают очередную оценку направления, которая поступает в блок БДСα 9 динамического сглаживания оценок направления. В блоке БДD 8 выполняется суммирование элементов Bmnk по индексу mn а затем по k аналогично блоку 6, но с использованием весового коэффициента
получают очередную оценку величины отклонения направления на опорную точку данного цикла от фактического, корректируют на эту величину опорное направление и получают очередную оценку направления, которая поступает в блок БДСα 9 динамического сглаживания оценок направления. В блоке БДD 8 выполняется суммирование элементов Bmnk по индексу mn а затем по k аналогично блоку 6, но с использованием весового коэффициента  , так же поступающего из блока БВ 11, получая дискриминационную величину zD(αопj, Dопj), затем пересчитывают zD несколько раз, сканируя положение опорной точки в окрестностях αоп, Dоп: zD(αоп, Dоп±pΔD) находят точку
, так же поступающего из блока БВ 11, получая дискриминационную величину zD(αопj, Dопj), затем пересчитывают zD несколько раз, сканируя положение опорной точки в окрестностях αоп, Dоп: zD(αоп, Dоп±pΔD) находят точку  в которой zD=0 (используя интерполяцию) и принимают ее за оценку дальности данного цикла измерений
в которой zD=0 (используя интерполяцию) и принимают ее за оценку дальности данного цикла измерений  Измеряемое данным, предлагаемым способом, отклонение равно
Измеряемое данным, предлагаемым способом, отклонение равно  Полученная таким образом очередная оценка дальности поступает в блок БДСD 10 динамического сглаживания оценок дальности. В блоках БДСα 9 и БДСD 10 получают сглаженные оценки и их прогноз на следующий (j+1)-й цикл измерения координат известными способами сглаживания последовательностей [2]. Эти координаты назначаются опорной точкой этого цикла и поступают в блок БФН 2 формирования направленности антенн ПС αm(αоп, Dоп), в вычислитель БВ 11 для расчета разностей времен распространения сигнала к центрам антенн τmn, весовых коэффициентов
Полученная таким образом очередная оценка дальности поступает в блок БДСD 10 динамического сглаживания оценок дальности. В блоках БДСα 9 и БДСD 10 получают сглаженные оценки и их прогноз на следующий (j+1)-й цикл измерения координат известными способами сглаживания последовательностей [2]. Эти координаты назначаются опорной точкой этого цикла и поступают в блок БФН 2 формирования направленности антенн ПС αm(αоп, Dоп), в вычислитель БВ 11 для расчета разностей времен распространения сигнала к центрам антенн τmn, весовых коэффициентов  ,
,  и в блок управления БУ 12 (программируемый контроллер), который обеспечивает управление АЦП, циклами ДПФ, индикацией, наведением на ОТ, циклами измерений, формированием последовательностей оценок и динамическим сглаживанием.
и в блок управления БУ 12 (программируемый контроллер), который обеспечивает управление АЦП, циклами ДПФ, индикацией, наведением на ОТ, циклами измерений, формированием последовательностей оценок и динамическим сглаживанием.
Работоспособность предлагаемого способа пассивного определения координат иллюстрирует численный пример, результаты которого наглядно показаны на фиг. 2а и 3а, где изображены два примера измерения координат слабого источника в присутствии сильного МИ. Для иллюстрации выбрана ситуация, когда ПС и МИ неподвижны (МИ в точке 13, начало координат в центре ПС), а слабый источник (СИ) проходит по линейной траектории между ними от точки 15 до 16, в том числе пересекая направление створа с МИ α=16°. Координаты СИ определяются известным способом-прототипом [5] и предлагаемым способом в последовательных точках расположения СИ. В качестве индикатора сигнальных отметок источников 13 и 16 в выбранном секторе углов 11.5°÷20.5° и интервале дальностей 0.0÷10 км принята двухкоординатная индикаторная картина по способу [4], где по оси х - направление α, по оси у - дальность D км. Для наглядности на фиг. 2б и 3б эти картины показаны в аксонометрической проекции с сигнальной отметкой МИ (13) и СИ (16)
В численном примере использованы следующие исходные данные:
Количество антенн приемной системы М=5; базовый размер ПС В=60 м (4×15 м); число приемников в каждой антенне Nпр=20, интервал между приемниками d≈λв/2, где λв - длина волны на верхней частоте диапазона приема λв=0.1875 м, B/λв=320.
Координаты сильного мешающего источника (МИ): <αми=16°, Dми=6.0 км> (точка 13), постоянные.
Координаты интересующего наблюдателя движущегося слабого источника (СИ): от точки 15 <αси=12°, Dси=2.8 км> до точки 16 <αси=20°, Dси=2.0 км. 16 - вершина сигнальной отметки СИ в конечной точке ее траектории.
В точке приема уровень МИ рми больше уровня СИ pси:
на фиг. 2 рми / рси=3 раза (по напряжению),
на фиг. 3 рми / рси=6 раз.
Полоса частот СИ и МИ 3.0÷8.0 кГц, длина волны на верхней частоте ƒвλв=0.1875 м. Время осреднения принято Тн=1.3 с. Динамическое сглаживание не использовалось, чтобы не «дополнять» преимущества пространственной фильтрации предлагаемым способом.
Соотношение уровней сигналов рси и рми и фоновой распределенной помехи рф в точке приема: pми/pф=3,
на фиг. 2 рси/рф=1.0;
на фиг. 3 рси/рф=0.5.
Количественный результат подавления бокового поля сильного МИ по предлагаемому способу: сектор недостоверных измерений координат в окрестностях направления створивания с МИ (16°) при соотношении уровней МИ и СИ 3/1 (фиг. 2):
по способу [7] 16°±1.5°,
по предлагаемому способу 16°±0.3°,
т.е. сектор недостоверных измерений при использовании предлагаемого способа сокращается в 5 раз при отклонениях от истинной траектории за его пределами не более 100 м (3.7% от истинной дальности, по способу [7] до 10%).
При соотношении уровней МИ и СИ 6/1 (фиг. 3):
По способу [7]: оценки дальности практически во всем наблюдаемом секторе 16°±4° искажены боковыми лепестками сигнальной отметки МИ с отклонениями от истинной траектории до 2.5-2.9 км, что практически исключает возможность в данных условиях оперативного определения текущих параметров движения источника, интересующего наблюдателя, с использованием известного способа-прототипа [7]. По предлагаемому способу сектор недостоверных измерений не более 16°±1°, т.е. сектор недостоверных измерений сокращается более чем в 4 раза, при размахе отклонений от истинной траектории за его пределами не более 150 м (5.5% от истинной дальности).
Здесь мы не приводим наглядно сравнительные результаты оценки направления предлагаемым способом и способом-прототипом, чтобы не перегружать объем данного материала. Эти результаты по принципу идентичны описанным, но благодаря большому волновому размеру ПС (В/λв=320) точность и разрешение по направлению количественно высоки настолько, что за пределами сектора створивания отклонения смещения составляют десятые и сотые доли градуса, что в настоящее время удовлетворяет практическим приложениям, в то время как свойства пассивной оценки дальности актуальны, особенно на больших дистанциях.
Источники информации
1. Гусев В.Г. Системы пространственно-временной обработки гидроакустической информации. Л.: Судостроение, 1988.
2. Гусев В.Г., Якубовский A.M., Янутш А.Д. // Радиотехника и электроника, 1997. Т. 42. №6. С. 694.
3. Г. Корн, Т. Корн. Справочник по математике. М.: «Наука», 1974.
4. Способ пассивного определения координат источников излучения. Патент №2507531. Россия. МПК J01S 3/80. Приоритет 08.11.2012, рег. 20.02.14 г.
5. Способ пассивного определения координат движущегося источника излучения. Патент №2623831. Россия. МПК J01S 3/80. Рег. 29.06.17 г.
6. Кузьмин С.З. Цифровая обработка радиолокационной информации. М.: Сов. радио. 1967.
7. Л.Е. Гампер. О пространственных характеристиках трехмерной разнесенной акустической системы. Натурные испытания. Докл. XI школы-семинара им. акад. Л.М. Бреховских "Акустика океана" и XVII сессия Российского Акустического общества, май 2006 г. М.: ГЕОС, 2006.
8. Г. Дженкинс и Д. Ваттс. Спектральный анализ и его приложения. М.: «Мир», 1971.


























Способ обработки сигнала шумоизлучения объекта
Антенная система эхолота для надводного корабля
Способ измерения скорости звука
Гидроакустический способ определения пространственных характеристик объекта на дне
Гидроакустический способ обработки рыбопромысловой информации
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории
Способ измерения радиальной скорости объекта по его шумоизлучению
Способ цветового кодирования информации гидроакустического шумопеленгования
Гидроакустический способ измерения глубины погружения неподвижного объекта
Активный гидролокатор
Способ пассивного определения координат источников излучения
Способ пассивного определения координат движущегося источника излучения
Способ определения координат движущихся источников излучения пассивным гидролокатором
Способ пассивного определения координат источников гидроакустического излучения
Способ пассивного определения координат источников гидроакустического излучения
Способ и устройство обнаружения шумящих в море объектов бортовой антенной

