Результат интеллектуальной деятельности: Корректор угла крена для уточнения траектории летательного аппарата
Вид РИД
Изобретение
Изобретение относится к области авиации, в частности к области устройств помощи в навигации для уточнения траектории летательного аппарата. Изобретение предназначено для применения в области авиационного приборостроения в пилотажно-навигационном оборудовании летательных аппаратов (ЛА).
Помощь в навигации заключается в уточнении углов пространственного положения ЛА после отделения от носителя с целью исключения отклонения беспилотного автономного ЛА от заданной траектории. По причине воздействия вихревых потоков, создаваемых носителем, неравномерного срабатывания замков подвеса или из-за воздействия набегающего потока на несимметричную аэродинамику при отделении ЛА может получить большие крутящие моменты. Как показывает практика, угловые скорости вращения могут превысить максимальный порог измерения датчиков угловых скоростей (ДУС). В результате после остановки вращения стабилизированный угол крена может отличаться от нуля на десятки градусов, что приводит к сильному отклонению ЛА от заданной траектории. Предлагаемый корректор позволяет автономно уточнить угол крена после устранения вращения ЛА. Во многих ЛА используются инерциальные системы управления, а спутниковые корректоры отсутствуют. Даже при наличии спутниковых приемников время захвата сигналов от спутников или намеренно установленные помехи не позволяют их использовать на начальном этапе полета. Случай, приведенный выше, имеет вероятностный характер и используется единожды после отделения носимого ЛА от носителя. По этой причине установка на ЛА нескольких ДУС с разными диапазонами измерений сопряжена с необходимостью значительных финансовых затрат и в ряде случаев нецелесообразна.
Известен способ коррекции угла крена и корректор угла крена, патент РФ №2362108, МКП F41G 7/00, опубликован 20.07.2009 г., бюл. №20.
В первоначальный момент времени измеряют либо устанавливают заранее известное значение начального угла крена ЛА, а также измеряют в двух взаимно перпендикулярных плоскостях, пересекающих ось ЛА, составляющие магнитного поля Земли, по которым определяют исходный угол крена. В ЛА, вращающемся по углу крена, введены датчик магнитного поля Земли, корректор угла крена и последовательно соединенные задатчик начального угла крена и вычислитель. Коррекция угла крена осуществляется путем формирования в каждом из двух каналов для двух плоскостей управления движением ЛА сигналов коррекции соответственно в виде первой и второй алгебраических сумм. В корректор угла крена, в каждый канал введены управляемый инвертор и два умножителя.
Недостатком является низкая точность измерения углов магнитометрическим способом, необходимость установки большого количества магнитных датчиков.
Известен также способ помощи в навигации для определения траектории летательного аппарата, патент № RU 2523183, МКП G08G 5/02, G05D 1/06, приоритет от 28.04.2009 г. FR 09/02066, опубликован 20.07.2014 г., бюл. №20, выбранный нами за прототип.
Помощь в навигации заключается в определении будущей траектории захода на посадку путем произведения оценки прогнозируемых безопасных радиусов на будущей траектории, основанной на вычислении предельного момента, начиная с которого прогнозируемый безопасный радиус превышает или равен пределу выдачи тревожного сигнала, и вычисления предельного момента ухода, который соответствует максимальному моменту, в который летательный аппарат должен покинуть заранее определенную траекторию, по которой он двигался, чтобы иметь возможность выйти на безопасную высоту.
В приведенном выше изобретении отсутствует режим автономной коррекции углов ориентации при потере сигнала от спутниковых систем коррекции ИНС, что может привести к отклонению ЛА от заданной траектории.
Целью заявляемого изобретения является повышение точности формирования текущей траектории ЛА путем автономной коррекции угла крена.
Поставленная цель достигается за счет того, что в корректор угла крена для уточнения траектории летательного аппарата, содержащий датчики угловых скоростей (ДУС), датчики линейных ускорений (ДЛУ), бесплатформенную инерциальную навигационную систему (БИНС), первый и второй входы которого подключены соответственно к выходам ДУС и ДЛУ, дополнительно введены первое пороговое устройство, последовательно соединенные блок определения мгновенного значения крена, блок определения скользящих средних крена и его среднеквадратического отклонения (СКО), второе пороговое устройство, первое логическое устройство и второе логическое устройство, причем вход первого порогового устройства подключен ко второму выходу ДУС, первый вход блока определения мгновенного значения крена подключен к первому выходу ДЛУ, второй вход этого же блока подключен ко второму выходу БИНС, второй вход блока определения скользящей средней оценки крена и его СКО подключен к первому выходу БИНС, а его выход подключен ко второму логическому устройству, второй вход первого логического устройства подключен к первому выходу БИНС, а третий вход - к выходу первого порогового устройства, первый вход БИНС подключен к первому выходу ДУС, выход второго логического устройства соединен с третьим входом БИНС, выходом устройства является третий выход БИНС.
Сущность изобретения поясняется чертежом фиг. 1, на котором представлена структурная схема заявляемого устройства и графиками фиг. 2, на котором представлены результаты моделирования коррекции угла крена.
Устройство содержит датчик 1 угловой скорости, датчик 2 линейных ускорений, БИНС 3, первое пороговое устройство 4, блок 5 определения мгновенного значения крена, блок 6 определения скользящей средней оценки крена и его СКО, второе пороговое устройство 7, первое логическое устройство 8, второе логическое устройство 9. Выходным сигналом устройства является скорректированный угол крена БИНС.
Суть работы корректора помощи в навигации для уточнения траектории летательного аппарата излагается ниже.
Коррекцию выполняют при стабилизации ЛА в положении, близкому к невозмущенному полету после отделения его от носителя.
Момент коррекции определяют по СКО оценки крена на скользящем интервале наблюдения с заданной длительностью.
По истечении времени t1, после отделения и при условии того, что СКО оценки крена на скользящем интервале меньше «П», корректирующее значение определяют соотношением:

черта сверху означает усреднение на скользящем интервале.
Учитывают интервал времени, на котором происходит интенсивное вращение изделия после его отделения от носителя. Для этого задают время t1, отсчитываемое от момента команды на отделение изделия, в течение которого происходит основное вращение изделия: - в течение t1 определяют наличие выхода ωx на ограничение; - по истечении t1 находят «площадку» крена, на которой он достаточно стабилен для использования статической оценки крена  - поскольку поиск «площадки» необходимо выполнять в процессе счисления ориентации, то коррекция включается в «Быстрый цикл» решения навигационного алгоритма БИНС по Δt.
- поскольку поиск «площадки» необходимо выполнять в процессе счисления ориентации, то коррекция включается в «Быстрый цикл» решения навигационного алгоритма БИНС по Δt.
Момент обнаружения «площадки» крена фиксируют по величине скользящего СКО крена - σ(γ), которое вычисляют на скользящем интервале с заданной длиной. Момент обнаружения «площадки» заранее не определен и может варьироваться в зависимости от продолжительности и интенсивности вращения, но этот момент всегда больше t1.
Конкретное значение момента времени обнаружения «площадки» фиксируют в виде номера отсчета измерений от команды на отделение  до убывания скользящего СКО крена σ(γ) ниже заданного порога «П». Обнаружение «площадки» свидетельствует о достаточно стабильном положении изделия по крену, при этом само значение крена может быть различным в зависимости от того, насколько удачно оно стабилизировалось в данном полете.
до убывания скользящего СКО крена σ(γ) ниже заданного порога «П». Обнаружение «площадки» свидетельствует о достаточно стабильном положении изделия по крену, при этом само значение крена может быть различным в зависимости от того, насколько удачно оно стабилизировалось в данном полете.
Параллельно с вычислением скользящего СКО крена σ(γ) вычисляют скользящее среднее статической оценки крена  Для этого мгновенные значения статической оценки крена
Для этого мгновенные значения статической оценки крена  усредняют на текущем положении скользящего интервала. Для коррекции используют скользящее среднее статической оценки крена
усредняют на текущем положении скользящего интервала. Для коррекции используют скользящее среднее статической оценки крена  на отсчете
на отсчете  момента обнаружения «площадки», которое обозначают как
момента обнаружения «площадки», которое обозначают как  Заметим, что успех использования формулы
Заметим, что успех использования формулы  обеспечивается только совместно с правильным обнаружением «площадки» и при усреднении мгновенных статических оценок на заданном интервале.
обеспечивается только совместно с правильным обнаружением «площадки» и при усреднении мгновенных статических оценок на заданном интервале.
Как только скользящее СКО крена σ(γ) становится меньше порога «П», фиксируют корректирующее значение крена  которое присваивают текущей оценке крена γ в алгоритме ориентации БИНС при условии, что за время t1 был зафиксирован выход ωх на ограничение.
которое присваивают текущей оценке крена γ в алгоритме ориентации БИНС при условии, что за время t1 был зафиксирован выход ωх на ограничение.
Таким образом, коррекцию выполняют на «площадке» установившегося углового положения по крену. Само угловое положение по крену при этом может быть произвольным. Момент времени обнаружения «площадки» определяют по скользящему СКО крена - σ(γ), где γ - оценка крена, вычисляемая в БИНС изделия. «Площадка» характеризуется тремя величинами:
- номером отсчета ее обнаружения - 
- величиной скользящего СКО крена - σ(γ) < «П»;
- величиной скользящего среднего статической оценки крена на момент обнаружения «площадки» - 
Коррекция крена заключается в присваивании оценке крена значения  при условии, что в течение t1 имел место выход угловой скорости ωx на ограничение. Если же «площадка» крена не обнаруживается, то это означает, что изделие постоянно вращается и коррекция крена по ДЛУ невозможна, тогда необходимо дождаться остановки вращения.
при условии, что в течение t1 имел место выход угловой скорости ωx на ограничение. Если же «площадка» крена не обнаруживается, то это означает, что изделие постоянно вращается и коррекция крена по ДЛУ невозможна, тогда необходимо дождаться остановки вращения.
Описание работы устройства коррекции. Время основного вращения изделия t1, отсчитывается от команды на отделение. Датчик 1 угловых скоростей измеряет величину угловой скорости по оси X. В первом пороговом устройстве 4 выполняется проверка выхода ωx на ограничение: - если модуль |ωx|>ωзад превысил ограничение, устанавливается признак 
Датчик 2 линейных ускорений измеряет перегрузку вдоль оси Z ЛА.
В блоке 5 определения мгновенного значения крена определяются мгновенные значения крена согласно выражению  на интервале времени t1-tn.
на интервале времени t1-tn.
В блоке 6 определяется скользящее среднее оценки значения крена  за определенное время tn и его СКО согласно выражению
за определенное время tn и его СКО согласно выражению  Выполняется сдвиг буфера для скользящего СКО крена σ(γ) и буфера для скользящего среднего оценки крена
Выполняется сдвиг буфера для скользящего СКО крена σ(γ) и буфера для скользящего среднего оценки крена  На массивах этих буферов вычисляется скользящее СКО крена σ(γ) и скользящее среднее оценки крена
На массивах этих буферов вычисляется скользящее СКО крена σ(γ) и скользящее среднее оценки крена 
Во втором пороговом устройстве 7 скользящее СКО крена σ(γ) сравнивается с порогом «П» для обнаружения площадки для коррекции.
Первое логическое устройство 8 собирает все признаки:
- Порог скользящего СКО крена σ(γ) для обнаружения «площадки»;
- Начальное значение признака обнаружения «площадки» крена γi=0;
- Начальное значение признака выхода на ограничение 
Если скользящее среднее СКО крена σ(γ)ct меньше порога «П» и текущее время от момента команды на отделение больше t1, тогда:
- устанавливает признак обнаружения «площадки» крена γi=1;
- запоминает номер отсчета обнаружения «площадки» крена 
- запоминает корректирующее значение крена  равное скользящему среднему статической оценки крена
равное скользящему среднему статической оценки крена  на момент обнаружения «площадки».
на момент обнаружения «площадки».
Во втором логическом устройстве 9 при наличии признака обнаружения площадки крена γi=1 происходит запоминание корректирующего значения крена  Если скользящее среднее СКО крена σ(γ)ct меньше порога «П» и номер текущего отсчета равен
Если скользящее среднее СКО крена σ(γ)ct меньше порога «П» и номер текущего отсчета равен  и признак выхода на ограничение установлен в единицу
и признак выхода на ограничение установлен в единицу  тогда в алгоритме ориентации СПО изделия выполняется замена текущей оценки крена ЛА γ на корректирующее значение
тогда в алгоритме ориентации СПО изделия выполняется замена текущей оценки крена ЛА γ на корректирующее значение 
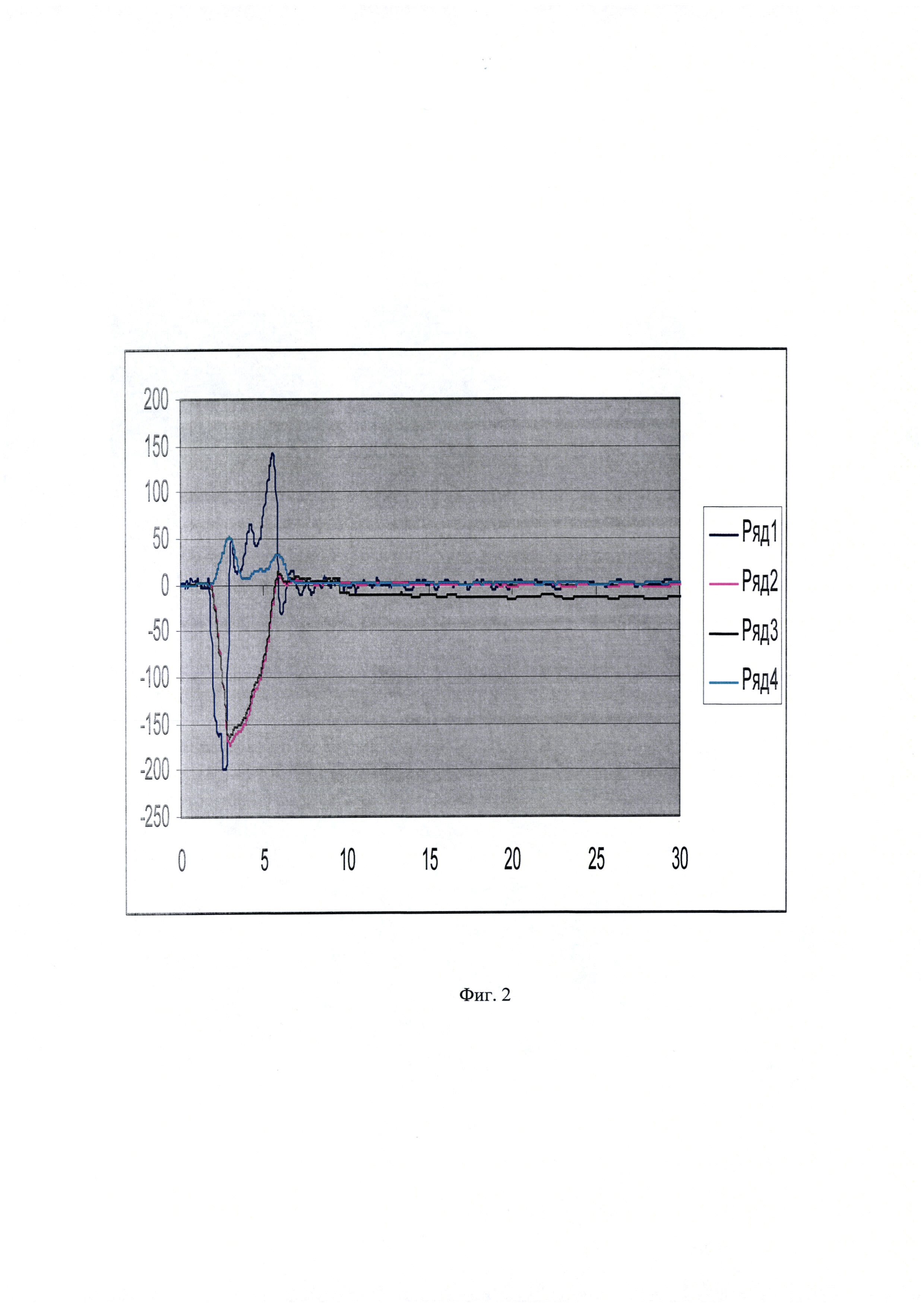
Результаты моделирования коррекции угла крена при наличии признака выхода на ограничение  представлены на фиг. 2, где: ряд 1 - угловая скорость ωx; ряд 2 - оценка крена по СПО изделия; ряд 3 - оценка крена, вычисленная по данным мультиплексного канала информационного обмена (МКИО) с учетом коррекции; ряд 4 - СКО оценки крена по СПО изделия на скользящем интервале. По истечении 5 секунд СКО оценки крена убывает и в момент времени 9.6 секунды становится меньше 0.5 градуса. Корректирующее значение, вычисленное по (1) равно -8.88 градуса. Без коррекции оценка крена в этот момент равна 2.60 градуса. Коррекция компенсирует ограничение отрицательной полуволны угловой скорости ωx.
представлены на фиг. 2, где: ряд 1 - угловая скорость ωx; ряд 2 - оценка крена по СПО изделия; ряд 3 - оценка крена, вычисленная по данным мультиплексного канала информационного обмена (МКИО) с учетом коррекции; ряд 4 - СКО оценки крена по СПО изделия на скользящем интервале. По истечении 5 секунд СКО оценки крена убывает и в момент времени 9.6 секунды становится меньше 0.5 градуса. Корректирующее значение, вычисленное по (1) равно -8.88 градуса. Без коррекции оценка крена в этот момент равна 2.60 градуса. Коррекция компенсирует ограничение отрицательной полуволны угловой скорости ωx.
Заявляемый корректор угла крена для уточнения траектории летательного аппарата может быть использован как на высокоманевренных, так и на маломаневренных ЛА. Технический результат - повышение точности формирования текущей траектории автономно управляемого ЛА путем определения угла крена управляемого ЛА после отделения его от носителя, используя сигналы бортовых инерциальных датчиков ЛА при возникновении вращения.
Корректор угла крена для уточнения траектории летательного аппарата, содержащий датчики угловых скоростей (ДУС), датчики линейных ускорений (ДЛУ), бесплатформенную инерциальную навигационную систему (БИНС), первый и второй входы которого подключены соответственно к выходам ДУС и ДЛУ, отличающийся тем, что в него дополнительно введены первое пороговое устройство, последовательно соединенные блок определения мгновенного значения крена, блок определения скользящих средних крена и его среднеквадратического отклонения (СКО), второе пороговое устройство, первое логическое устройство и второе логическое устройство, причем вход первого порогового устройства подключен ко второму выходу ДУС, первый вход блока определения мгновенного значения крена подключен к первому выходу ДЛУ, второй вход этого же блока подключен ко второму выходу БИНС, второй вход блока определения скользящей средней оценки крена и его СКО подключен к первому выходу БИНС, а его выход подключен ко второму логическому устройству, второй вход первого логического устройства подключен к первому выходу БИНС, а третий вход - к выходу первого порогового устройства, первый вход БИНС подключен к первому выходу ДУС, выход второго логического устройства соединен с третьим входом БИНС, выходом устройства является третий выход БИНС.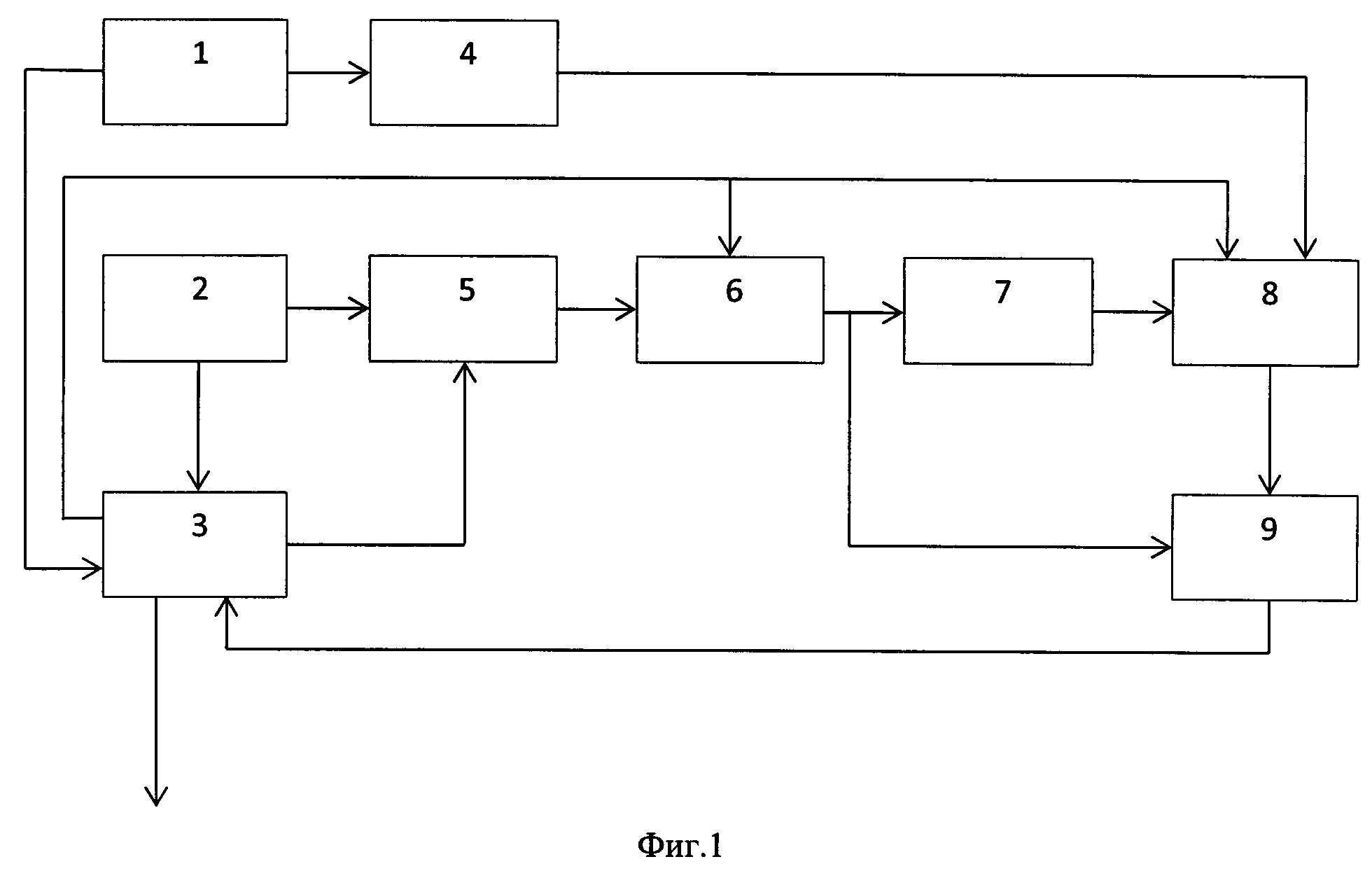
Способ идентификации нелинейных систем
Гибридный способ измерения углового положения
Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков дус
Способ повышения точности калибровки блока микромеханических датчиков угловой скорости
Гибридный датчик измерения углового положения
Способ коррекции углов ориентации бинс
Устройство определения тяги двигателей самолета
Способ контроля данных от спутниковых навигационных систем и устройство для его осуществления
Способ определения углов пространственной ориентации летательного аппарата и устройство для его осуществления
Способ определения углов пространственной ориентации летательного аппарата и устройство для его осуществления
Исполнительный механизм системы управления
Способ определения тяги при изменении режима работы двигателей самолета и устройство для его осуществления
Устройство определения углов пространственной ориентации летательного аппарата
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Исполнительный механизм системы управления
Способ управления полетом летательного аппарата

