Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С БИПОЛЯРНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Предполагаемое изобретение относится к электротехнике и может быть использовано в системах управления шаговыми двигателями (ШД) в дискретных электроприводах. Данное техническое решение может применяться преимущественно при решении задачи определения механического упора электропривода с работающим в полношаговом режиме биполярным шаговым двигателем без потери синхронизма и установке этого привода в начальное положение.
Известны способы установки в начальное положение электропривода с шаговыми двигателями с применением контактного датчика начального положения [1], или оптического щелевого датчика «нуль-метки», производства компании Honeywell НОА08 [2]. Использование таких решений приводит к увеличению габаритов привода, и требует дополнительной механической связи выходного вала с датчиком. Наиболее целесообразным способом определения начального (нулевого) положения, в настоящее время, считаются бездатчиковые методы. Они основаны на контроле изменений электрических параметров (обычно напряжений или токов) в обмотках ШД при встрече с механическим упором в процессе движения.
Например, в [3] и [4] для обнаружения механического упора в ШД, измеряют напряжение на обесточенной обмотке, равное значению наведенной в ней обратной ЭДС, которое выпрямляют, интегрируют на интервале шага, определяют локальные максимумы и минимумы этого интеграла и их разность. Полученные значения сравнивают с предопределенными порогами и по полученному результату определяют состояние двигателя. Применение данного способа требует использования значительных программных и аппаратных ресурсов для преобразования, хранения и обработки результатов преобразования нескольких значений аналоговых сигналов. Кроме того, данное техническое решение применимо только в случае работы ШД с поочередным включением обмоток (так называемый «волновой режим»). Такой способ управления ШД называют волновой последовательностью "one phase on" full step или wave drive mode [5]. В настоящее время чаще применяется полношаговый режим с двумя одновременно включенными обмотками, обеспечивающий примерно на 40% больший момент, чем в случае с поочередным включением обмоток. Его называют "two-phase-on" full step или full step mode.
Известны также технические решения, (например [6-8]), в которых для обнаружения механического упора используют измерение процесса изменения тока в одной обмотке или суммы токов во всех обмотках ШД при выполнении очередного шага. В качестве критерия, определяющего достижение ротором ШД механического упора, в [6] и [7] используется взятая на отрезке измерения сумма квадратов разностей отсчетов синхронных измерений тока в обмотке на текущем и предыдущем шагах или сумма квадратов разностей отсчетов измерений тока в обмотке и его среднего значения на текущем шаге. Когда эта сумма превышает заранее заданный порог, принимается решение о достижении ротором ШД механического упора. Реализация этих операций требует значительных аппаратных и программных ресурсов, в том числе большого объема памяти. К тому же такой способ обладает невысокой помехозащищенностью.
Наиболее близким к предполагаемому изобретению является техническое решение по патенту [8], выбранное в качестве прототипа. В нем ШД работает в микрошаговом режиме, а определение достижения механического упора включает следующие операции:
а) измерение по крайней мере одного тока фазы и/или измерение суммы всех токов фаз на регулярных временных интервалах, синхронных с микрошагами;
б) вычисление разности между измеренным током фазы в первый момент и измеренным током той же самой фазы в предыдущий момент и/или разность между измеренной суммой всех токов фазы в первый момент и измеренной суммой всех токов фазы в предыдущий синхронный момент;
в) анализ серии полученных текущих разностей, чтобы сформировать сигнал обнаружения упора.
Реализация описанного способа [8] требует значительных аппаратных и программных ресурсов для преобразования аналоговых сигналов в цифровые значения в строго определенные моменты времени, хранение результатов отсчетов измеряемых процессов, полученных в разные моменты времени на текущем и предыдущем шагах, последовательное выполнение арифметических и логических операций. Кроме того, установка дополнительного датчика тока внутри готового прибора (драйвера шагового двигателя) требует его доработки, что ограничивает его применение в эксплуатирующихся устройствах. Также существенным недостатком прототипа является тот факт, что для принятия решения о достижении упора необходимо выполнить, по крайней мере, два шага.
Задачами предполагаемого изобретения являются: упрощение способа и устройства для определения момента достижения электроприводом механического упора, расширение их области применения, снижение аппаратных и программных затрат, а также повышение помехозащищенности.
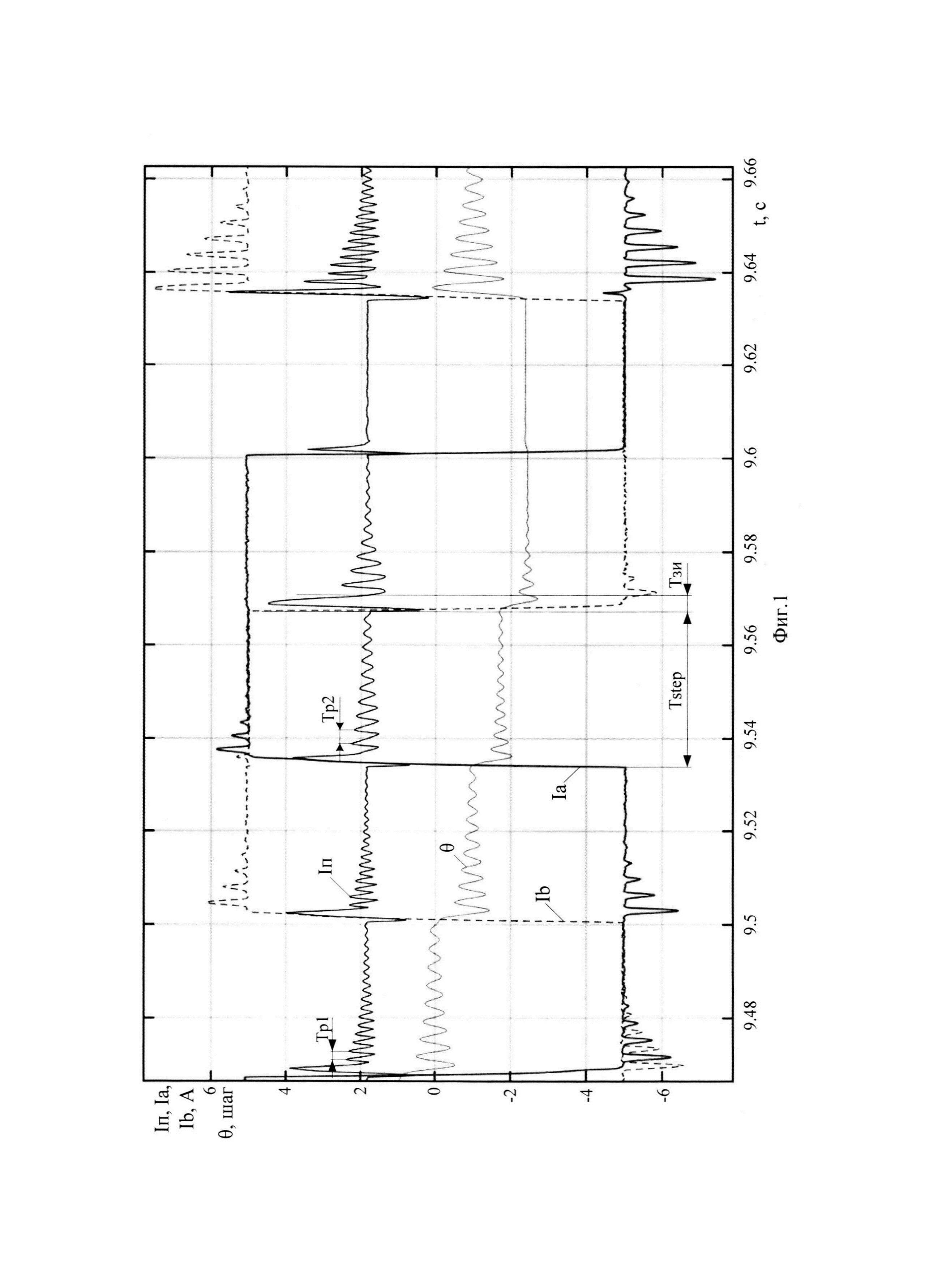
Предлагаемое техническое решение предназначено для определения момента достижения механического упора электроприводом с биполярным шаговым двигателем, работающим в полношаговом режиме с двумя одновременно включенными обмотками. Способ основан на характерном изменении тока питания драйвера при встрече ротора шагового двигателя с препятствием. Соответствующий процесс изменения тока питания Iп драйвера ШД, полученный экспериментально, приведен на фиг. 1. На этом же графике показаны процессы изменения тока обмоток Ia, Ib и процесс изменения углового положения ротора θ. Можно заметить, что после реверса тока каждой из обмоток ШД при совершении очередного шага наступает интервал времени, на котором происходят свободные колебания ротора привода со всеми присоединенными к нему элементами, сопровождающиеся пульсациями тока питания драйвера. При касании ротора ШД механического упора на него начинает действовать нагрузка, вызывающая упругую деформацию, и ротор уже не может повернуться на полную величину шага (см. третий по счету шаг, показанный на фиг. 1). Одновременно на том же шаге, как хорошо видно на графике, происходит резкое увеличение периода пульсаций тока питания драйвера на отрезке времени, начинающимся сразу после завершения реверса тока в активной на текущем шаге обмотке ШД. Это наблюдение послужило физической основой предполагаемого изобретения.
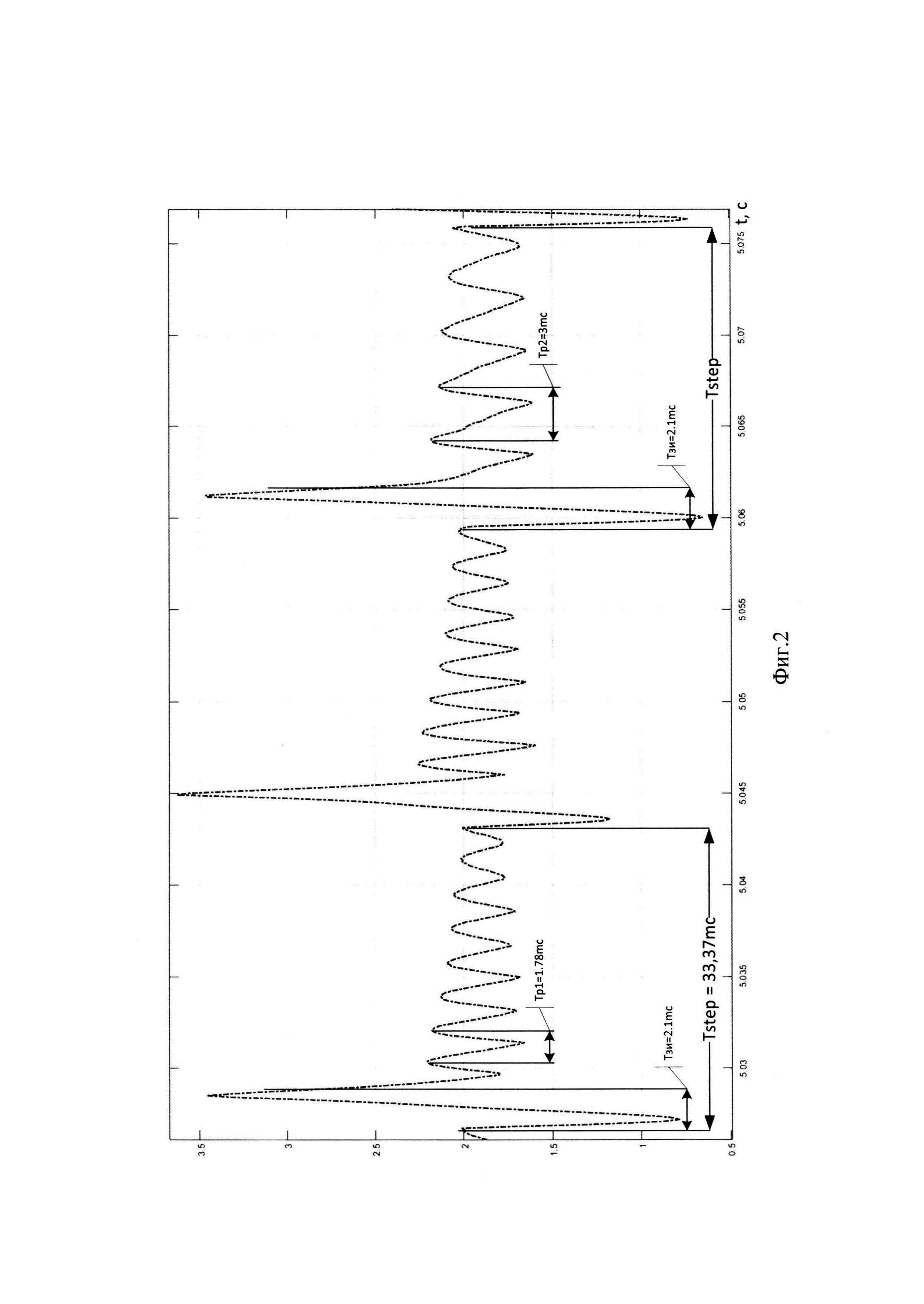
Период пульсаций тока питания драйвера при беспрепятственном движении ротора ШД электропривода в сторону механического упора равен Tp1 (см. фиг. 1), а при возникновении упругой деформации становится равным Тр2. Период выполнения шагов для приведенного эксперимента был установлен Tstep, а отрезок времени, который требовался для осуществления реверса тока в активной обмотке ШД равнялся Тзи. На фиг. 2 в увеличенном масштабе показан процесс изменения тока питания драйвера ШД на первых трех шагах, приведенных на фиг. 1. Здесь же указаны конкретные числовые значения упомянутых выше временных параметров экспериментальных процессов. Для исследования влияния различных факторов на количественную характеристику изменения периода пульсаций тока питания драйвера при касании механического упора было проведено компьютерное моделирование поведения электропривода в соответствующих условиях. Главное внимание было уделено влиянию на период пульсаций тока питания драйвера коэффициента упругости механической системы при возникновении упругой деформации, вызванной касанием ротора ШД к механического упора. Проведенные на компьютерной модели исследования показали, что в области допустимых значений нагрузки период пульсаций тока питания драйвера при касании механического упора увеличивается не менее чем в полтора раза. В частном случае по экспериментальным данным, приведенным на фиг. 2, это увеличение составляет приблизительно 1,685 раза.
Для решения задачи предполагаемого изобретения определяют период пульсаций тока питания драйвера ненагруженного электропривода (Tp1), а при движении ротора в сторону механического упора на отрезке времени, вмещающем не менее двух периодов пульсаций тока питания драйвера ненагруженного электропривода и отстоящем от момента подачи управляющего сигнала на интервал времени, достаточный для изменения полярности тока в активной фазе шагового двигателя, измеряют период пульсаций тока питания драйвера шагового двигателя, возникающих после подачи управляющего сигнала, и, когда этот период превысит заранее выбранное пороговое значение, формируют сигнал, являющийся признаком достижения электроприводом механического упора. При этом под интервалом времени, достаточным для изменения полярности тока в активной фазе шагового двигателя, понимается интервал времени, на котором происходит изменение направления тока в обмотке активной фазы ШД и достижение его абсолютной величиной стабилизируемого драйвером значения.
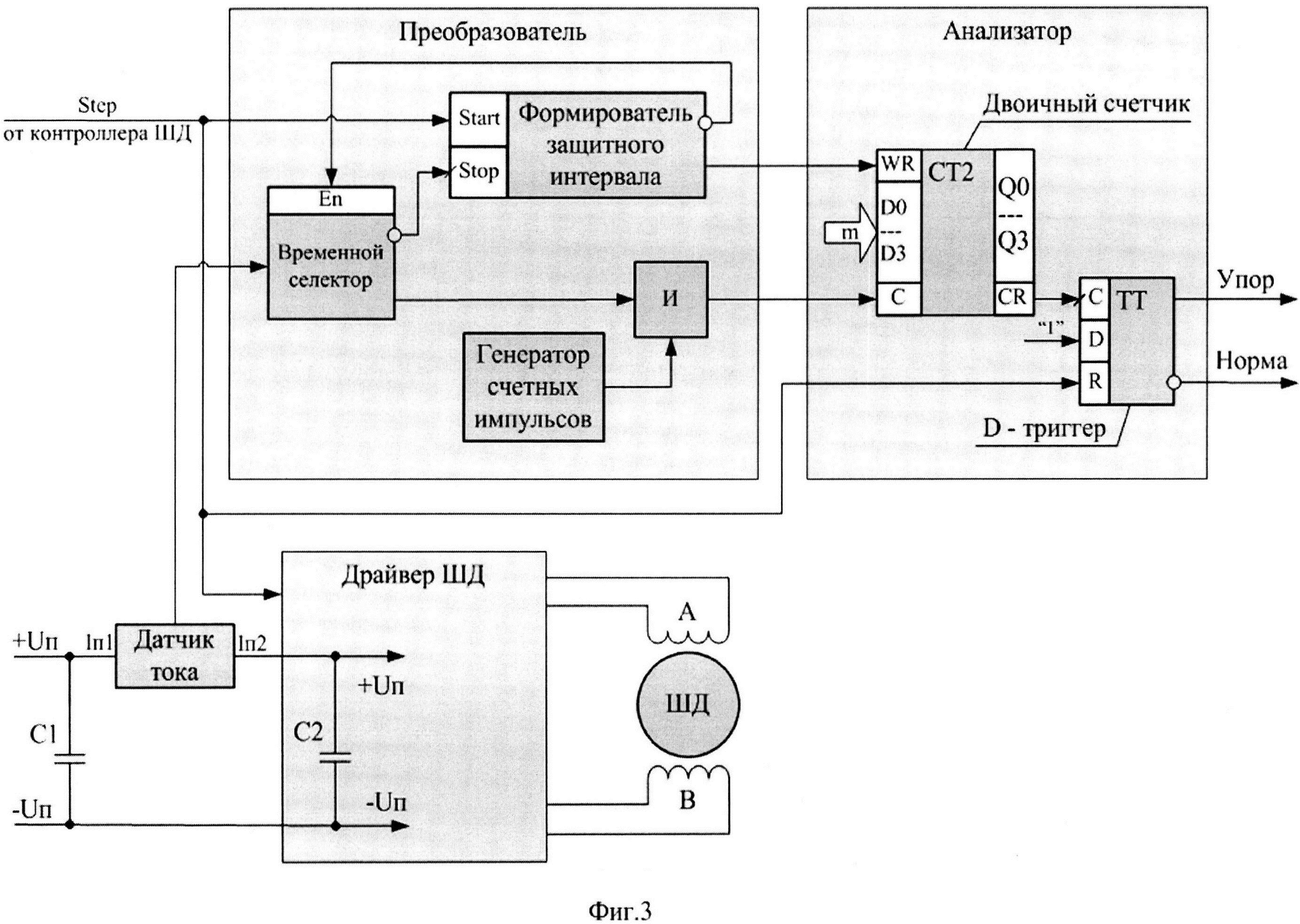
Для реализации предлагаемого способа определения момента достижения механического упора электроприводом с биполярным ШД, работающим в полношаговом режиме, разработано устройство, у которого выводы датчика тока подключаются в разрыв цепи питания драйвера ШД, преобразователь снабжен дополнительным входом и дополнительным выходом, а анализатор - двумя дополнительными входами. При этом дополнительные входы преобразователя и анализатора связаны с соответствующим выходом контроллера шагового двигателя, а дополнительный выход преобразователя соединен со вторым дополнительным входом анализатора. Преобразователь содержит временной селектор, элемент И, формирователь защитного интервала и генератор счетных импульсов. Выход генератора счетных импульсов соединен с первым входом элемента И. Прямой выход формирователя защитного интервала является дополнительным выходом преобразователя, а его инверсный выход соединен с входом разрешения временного селектора, аналоговый вход которого является входом преобразователя. Прямой выход временного селектора соединен со вторым входом элемента И, выход которого является выходом преобразователя, а инверсный выход временного селектора соединен с динамическим входом Stop формирователя защитного интервала, потенциальный вход Start которого является дополнительным входом преобразователя. Анализатор содержит двоичный счетчик и D-триггер, прямой и инверсный выходы которого являются соответствующими выходами анализатора. Вход сброса D-триггера является дополнительным входом анализатора. Вход данных D-триггера соединен с источником высокого логического потенциала, а его тактовый вход - с выходом переноса двоичного счетчика, тактовый вход которого является входом анализатора, а вход записи двоичного счетчика является вторым дополнительным входом анализатора.
Сущность предлагаемого технического решения поясняется чертежами.
Фиг. 1. Полученные экспериментально осциллограммы процессов изменения токов в обмотках ШД, тока питания драйвера ШД и углового положения ротора при его движении в сторону механического упора.
Фиг. 2. Экспериментальная осциллограмма процесса изменения тока питания драйвера ШД и числовые значения его временных параметров.
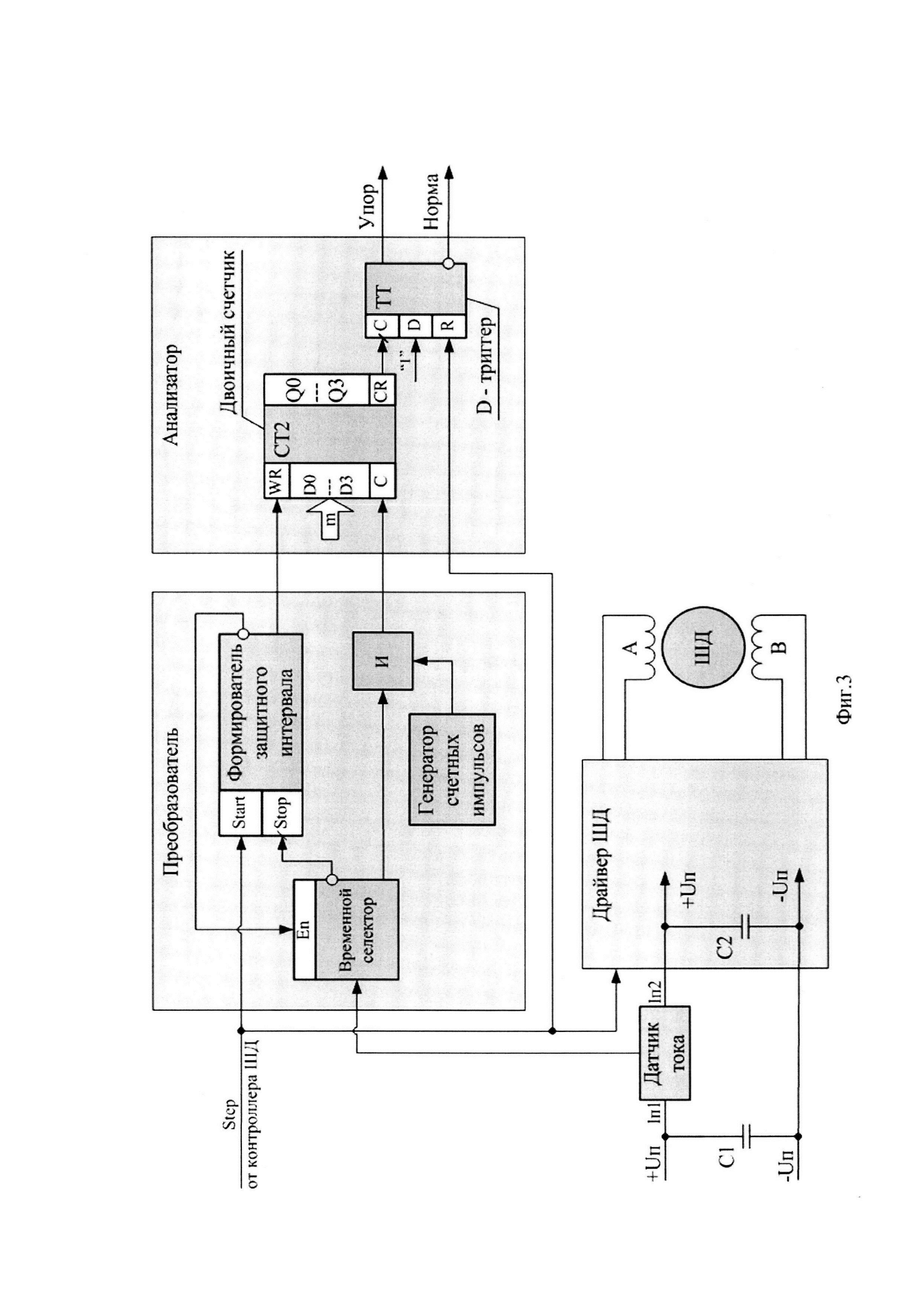
Фиг. 3. Функциональная схема устройства для определения момента достижения электроприводом с биполярным ШД, работающим в полношаговом режиме, механического упора и схема его включения в цепь питания драйвера.
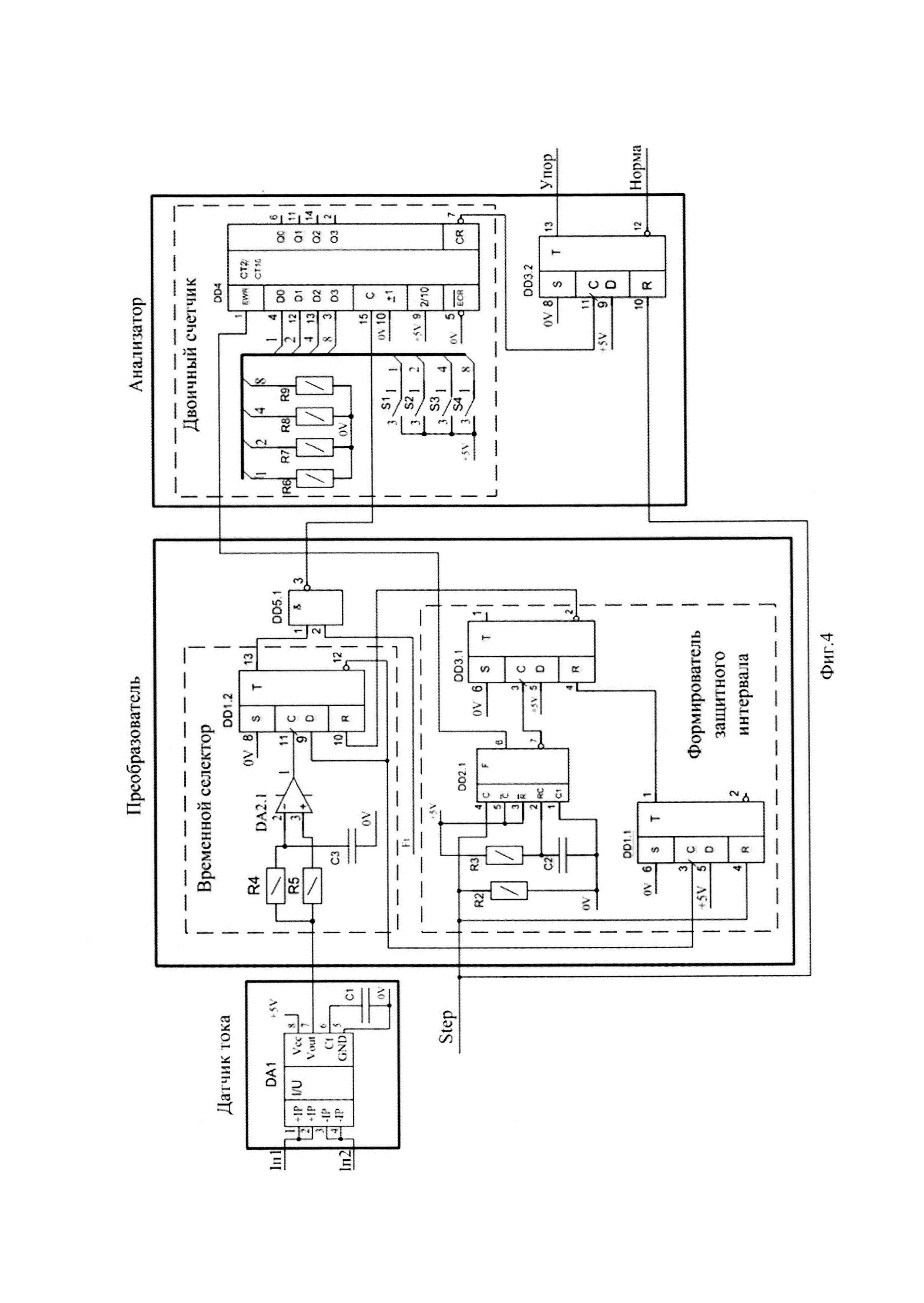
Фиг. 4. Электрическая принципиальная схема возможного исполнения устройства для определения момента достижения электроприводом с биполярным ШД механического упора.
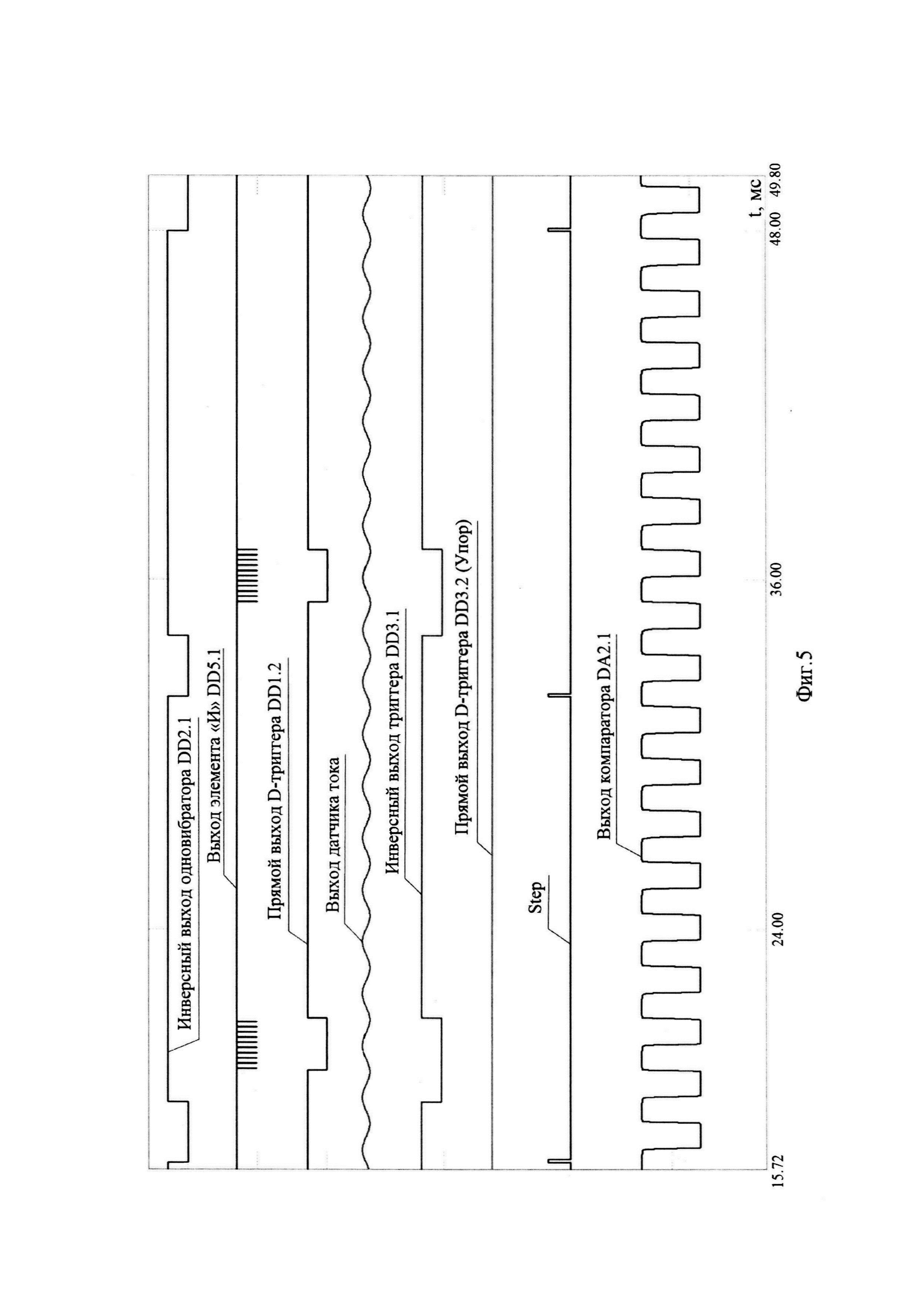
Фиг. 5. Результаты компьютерного моделирования работы электрической принципиальной схемы возможного исполнения устройства для определения момента достижения электроприводом с биполярным ШД механического упора на отрезке времени, где электропривод не достигает механического упора.
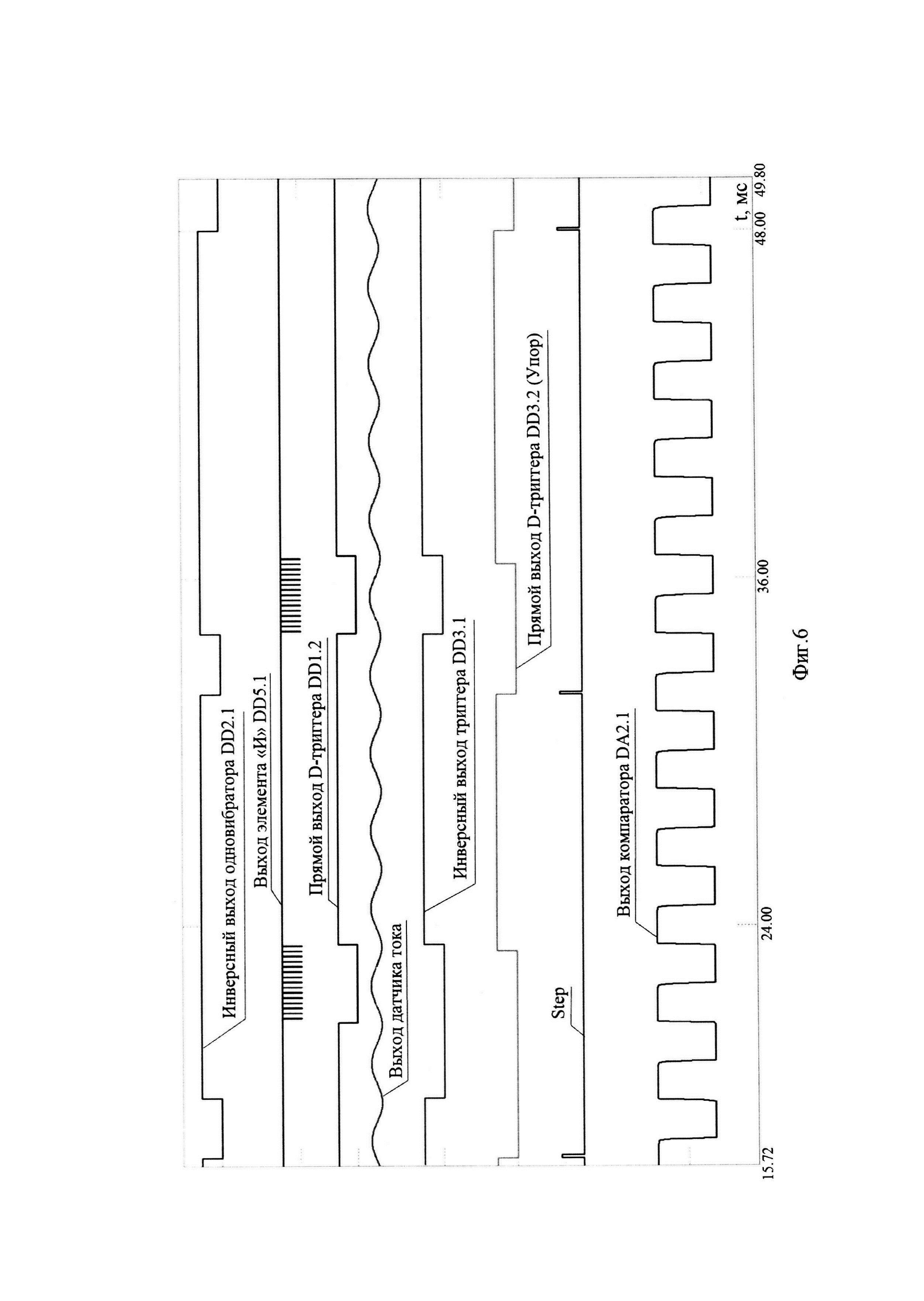
Фиг. 6. Результаты компьютерного моделирования работы электрической принципиальной схемы возможного исполнения устройства для определения момента достижения электроприводом с биполярным ШД механического упора на отрезке времени, где движение электропривода ограничено механическим упором.
Предлагаемый способ определения момента достижения механического упора электроприводом с биполярным шаговым двигателем, работающим в полношаговом режиме, основан на определении информационного параметра процесса изменения тока в цепях питания на текущем шаге при движении ротора в сторону механического упора синхронно с выполнением шага под действием управляющего сигнала. В качестве такого информационного параметра в предлагаемом техническом решении используется период пульсаций тока питания драйвера ненагруженного электропривода, который позволяет определить его заранее выбранное пороговое значение. Этот период (Tp1 на осциллограмме фиг. 1 и 2) определяют с помощью любого стандартного измерительного средства (например, осциллографа) при наблюдении за процессом изменения тока питания драйвера ненагруженного электропривода во время движения ротора его ШД в сторону механического упора. Далее, при работе привода на каждом текущем шаге, выполняемым в соответствии с управляющим сигналом, на отрезке времени, вмещающем не менее двух периодов пульсаций тока питания драйвера ненагруженного электропривода и отстоящем от момента подачи управляющего сигнала на интервал времени (Тзи на фиг. 1 и фиг. 2), достаточный для установления абсолютной величины тока после изменения его полярности в активной фазе шагового двигателя, измеряют период пульсаций тока питания драйвера ШД, возникающих после подачи управляющего сигнала. Когда этот период (значение Тр2 на фиг. 1 и фиг. 2) превысит заранее выбранное пороговое значение, формируют сигнал, являющийся признаком достижения электроприводом механического упора.
Пороговое значение периода пульсаций тока питания драйвера на основе экспериментальных данных и результатов, полученных при компьютерном моделировании, выбирают на 25% больше периода пульсаций тока питания драйвера ненагруженного электропривода. Этот выбор сделан потому, что величина периода пульсаций тока питания драйвера ненагруженного электропривода Tp1 достаточно стабильна, а величина периода пульсаций тока питания драйвера при касании ротора ШД механического упора (на фиг. 1 и фиг. 2 это значение Тр2) не менее чем в полтора раза выше Tp1. Таким образом, пороговое значение периода пульсаций тока питания драйвера для обеспечения помехозащищенности выбрано как среднее арифметическое между Tp1 и Тр2. Возможен выбор и другого порогового значения. Важно, что на текущем шаге, когда только возникает упругая деформация, периода пульсаций тока питания драйвера сразу существенно увеличивается по сравнению с предыдущим шагом. Важно также, что определение момента достижения электроприводом механического упора происходит без выпадения ШД из синхронизма. Как видно (см. фиг. 1) из осциллограммы процесса изменения углового положения ротора 9 потеря синхронизма, сопровождающаяся «отскоком» ротора в направлении, противоположном его движению в сторону механического упора, происходит только через два шага после превышения периодом пульсаций тока питания драйвера порогового значения и формирования признака достижения электроприводом механического упора.
При реализации предлагаемого способа в силу высокой помехозащищенности период пульсаций тока питания драйвера приближенно определяют как отрезок времени между соседними моментами перехода тока в одинаковом направлении через уровень, соответствующий текущему значению его постоянной составляющей. При этом текущее значение постоянной составляющей тока питания драйвера формируют как сигнал, полученный после обработки тока питания драйвера фильтром нижних частот (ФНЧ) с постоянной времени в 6…8 раз превышающей величину периода пульсаций тока питания драйвера ненагруженного электропривода. Такой выбор постоянной времени ФНЧ и результаты моделирования его работы будут приведены ниже.
Один из вариантов реализации предлагаемого способа состоит в том, что период пульсаций тока питания драйвера шагового двигателя определяют как отрезок времени между его соседними максимумами.
При реализации предлагаемого способа с помощью предлагаемого устройства величину отрезка времени, равного периоду пульсаций тока питания драйвера, определяют, подсчитывая помещающееся внутри него число квантующих импульсов с периодом повторения, величину которого выбирают в восемь раз меньше величины периода пульсаций тока питания драйвера ненагруженного электропривода. Возможно определение периода пульсаций тока питания драйвера с использованием любого другого известного метода измерения временных интервалов.
Интервал времени, достаточный для изменения полярности тока в активной фазе шагового двигателя, в предлагаемом устройстве для реализации заявляемого способа определяют как промежуток времени от момента подачи управляющего сигнала на выполнение очередного шага до достижения током питания при его уменьшении значения, на 30% превышающего среднее значение постоянной составляющей тока питания драйвера. Возможно определение интервала времени, достаточного для изменения полярности тока в активной фазе шагового двигателя, другим способом и другими аппаратными средствами, обеспечивающими точность не хуже 10%.
Схема включения датчика тока показана на фиг. 3. В качестве драйвера ШД может быть использован любой драйвер, обеспечивающий управление биполярным шаговым двигателем с требуемым уровнем тока. Таким драйвером может быть, например [9]. В качестве датчика тока можно использовать датчик холла с гальванической развязкой ACS724LLCTR-05AB-T [10]. Конденсатор С2 входит в состав драйвера и имеет относительно небольшую емкость несколько сотен микрофарад, необходимую для нормальной работы вторичного источника питания (ВИП) драйвера. Конденсатор С1 - буферная емкость с номиналом несколько тысяч или десятков тысяч микрофарад, предназначенная для накопления и возврата энергии при ускорении и торможении ШД. Минимальная величина емкости выбирается исходя из рекомендаций изготовителя драйвера (например, APPENDIX А2 [11]) или определяется исходя из баланса энергии, как описано, например, в Section 1.1 [12]. Таким образом, включение датчика тока в разрыв цепи между С1 и С2 позволяет снизить влияние помех, вызванных работой регуляторов токов обмоток и ВИП, обеспечив полосу пропускания достаточную для полезного сигнала, содержащегося в пульсациях тока питания драйвера ШД. Включение датчика тока на входе драйвера ШД позволяет встраивать предлагаемое техническое решение в находящиеся в эксплуатации электроприводы с биполярными ШД. Выбор в качестве информационного параметра для обнаружения механического упора в шаговом двигателе, частоты пульсаций тока питания драйвера ШД позволяет значительно упростить критерий определения момента достижения механического упора, и, как следствие, схему его реализующего.
Функциональная схема устройства для определения момента достижения механического упора электроприводом с биполярным шаговым двигателем, реализующего предложенный способ, приведена на фиг. 3. Устройство состоит из датчика тока, преобразователя аналогового сигнала в импульсный сигнал пропорциональный периоду пульсаций тока после окончания переходного процесса вызванного переключением полярности тока в одной из обмоток ШД, и анализатора, обеспечивающего формирование сигнала - признака достижения механического упора по критерию превышения периодом пульсаций тока порогового значения.
Преобразователь имеет два входа и два выхода и содержит (см. схему фиг. 3) временной селектор, элемент И, формирователь защитного интервала (ФЗИ) и генератор счетных импульсов (ГСИ), выход которого соединен с первым входом элемента И. Аналоговый вход временного селектора является входом преобразователя. Прямой выход временного селектора соединен со вторым входом элемента И, выход которого является выходом преобразователя. Инверсный выход временного селектора соединен с динамическим входом Stop ФЗИ, потенциальный вход Start которого является дополнительным входом преобразователя. Прямой выход ФЗИ является дополнительным выходом преобразователя, а его инверсный выход соединен с входом разрешения временного селектора.
Анализатор содержит двоичный счетчик, тактовый вход которого является входом анализатора, и D-триггер, прямой и инверсный выходы которого являются соответствующими выходами анализатора. Вход сброса D-триггера является дополнительным входом анализатора. Вход данных D-триггера соединен с источником высокого логического потенциала, а его тактовый вход - с выходом переноса двоичного счетчика. Вход записи двоичного счетчика является вторым дополнительным входом анализатора.
Работа предлагаемого устройства для определения момента достижения механического упора электроприводом начинается с момента поступления на дополнительный вход преобразователя импульса Step - управляющего сигнала на выполнение шага ШД. Этот импульс, поступающий на потенциальный вход Start формирователя защитного интервала, блокирует работу временного селектора на время, необходимое для изменения направления тока в одной из обмоток ШД и начала работы алгоритма стабилизации уровня тока. По окончании защитного интервала формируется сигнал на инверсном выходе ФЗИ, который поступает на вход разрешения временного селектора, что разрешает формирование сигнала на его прямом выходе. Передний фронт разрешающего сигнала на прямом выходе временного селектора формируется в момент, когда начинается измерительный интервал, равный периоду пульсаций сигнала датчика тока. Задний фронт разрешающего сигнала на прямом выходе временного селектора формируется в момент окончания интервала времени, равного периоду пульсаций сигнала датчика тока. Сигнал с выхода временного селектора поступает на вход элемента И, на другой вход которого с выхода ГСИ приходят квантующие импульсы. Таким образом, получаемый на выходе элемента И сигнал представляет собой последовательность квантующих импульсов, помещающихся внутри интервала времени, равного периоду пульсаций тока питания драйвера ШД. В результате количество импульсов, передаваемых на выход элемента И, пропорционально периоду анализируемого сигнала. Одновременно с формированием заднего фронта разрешающего сигнала на инверсном выходе временного селектора формируется сигнал, поступающий на динамический вход Stop ФЗИ. При появлении нарастающего фронта этого сигнала ФЗИ возвращается в закрытое состояние и до поступления следующего импульса Step снимает сигнал разрешения со входа En временного селектора, обнуляя его прямой выход.
Поступление сигнала Step на дополнительный вход анализатора и, соответственно, на вход сброса D-триггера приводит к его установке в исходное состояние. При этом на прямом выходе D-триггера формируется сигнал низкого потенциала, а на инверсном выходе - сигнал высокого потенциала, что соответствует признаку «Норма» и свидетельствует, что электропривод не достиг механического упора. Когда на прямом выходе ФЗИ формируется сигнал высокого потенциала, он поступает на вход записи двоичного счетчика анализатора, обеспечивая в начале каждого шага запись в память двоичного счетчика числа m, равного пороговому значению периода пульсаций тока питания драйвера. Квантующие импульсы с выхода элемента И по окончании защитного интервала поступают на счетный вход двоичного счетчика анализатора. Приход каждого квантующего импульса уменьшает записанное в него число m на единицу. И при поступлении (m+l)-го импульса на выходе переноса CR двоичного счетчика формируется импульс, поступающий на тактовый вход D-триггера, что приводит к появлению на его прямом выходе сигнала высокого потенциала, соответствующего признаку «Упор» на прямом выходе анализатора. Если число импульсов пришедших на вход анализатора на текущем шаге меньше или равно пороговому значению, записанному в двоичный счетчик, то сигнал переноса не формируется и состояние выходов триггера остается в прежнем исходном состоянии.
Предлагаемое техническое решение может быть реализовано на дискретных элементах, с использованием ПЛИС (программируемая логическая интегральная схема), БМК (большой матричный кристалл) или на программно - аппаратных средствах микроконтроллера.
Электрическая принципиальная схема возможной реализации предлагаемого устройства на дискретных элементах приведена на фиг. 4. Питание схемы осуществляется от однополярного источника питания +5 В. На схеме цепи питания микросхем не показаны.
Датчик тока, для ШД мощностью до 100 Вт, может быть выполнен на микросхеме ACS724LLCTR-05AB-T [10], имеющей коэффициент преобразования 400 мВ/А в диапазоне токов ±5А и обладающей сопротивлением измерительной цепи 1,2 мОм. Использованная схема включения приведена на рисунке «Typical Application)) в [10]. Конденсатор С1, образующий RC фильтр первого порядка с внутренним сопротивлением Rf=1.8 кОм, выбран исходя из обеспечения полосы пропускания в 1,5 раза выше частоты пульсаций тока питания драйвера ШД ненагруженного электропривода.
Выходной сигнал датчика тока поступает на аналоговый вход временного селектора преобразователя, построенного на компараторе DA2.1 и D-триггере DD1.2 (см. схему на фиг. 4). Компаратор может быть выполнен на микросхеме MIC7211 [13].
На прямой вход компаратора сигнал Uвх с выхода датчика тока поступает напрямую, а на инверсный - его среднее значение Ucp, формируемое на выходе ФНЧ, образуемого цепью R4, С3. В результате, на выходе компаратора будет логическая единица, когда Uвx-Ucp>0, и логический ноль - в остальных случаях. Сигнал с выхода компаратора поступает на тактовый вход D-триггера DD1.2, обеспечивающего деление частоты на 2 при наличии логического нуля на входе R, разрешающего работу временного селектора. В качестве D-триггера DD1.2 может быть использована микросхема 564ТМ2 [0].
Сигнал разрешения для временного селектора поступает с выхода ФЗИ, который выполнен на D-триггерах DD1.1, DD3.1 (могут быть также использованы микросхемы 564ТМ2 [14]) и одновибраторе DD2.1, выполненным, например, на микросхеме 564АГ1В [15]. Работа ФЗИ начинается с прихода сигнала Step на вход запуска DD2.1, по переднему фронту которого начинается формирование защитного интервала. Одновременно сигнал Step поступает на вход сброса D-триггера DD1.1. Он снимает блокировку на установку сигнала разрешения нулевого уровня на инверсном выходе D-триггера DD3.1 по приходу на его тактовый вход по окончании защитного интервала нарастающего фронта с выхода одновибратора DD2.1. С этого момента разрешена работа временного селектора, который формирует измерительный интервал, равный периоду пульсаций тока питания драйвера ШД. По окончании этого измерительного интервала положительный фронт сигнала с инверсного выхода D-триггера DD1.2 поступает на тактовый вход D-триггера DD1.1, блокируя работу преобразователя до поступления на его дополнительный вход следующего импульса Step.
С прямого выхода временного селектора сигнал поступает на вход элемента И DD5.1, на второй вход которого приходят квантующие импульсы Ft от ГСИ (на схеме не показан и может быть выполнен, например, по схеме, приведенной на рис. 5.33 в [06]).
С выхода элемента И сигнал поступает на счетный вход двоичного счетчика анализатора. Двоичный счетчик может быть реализован на базе микросхемы DD4 типа 564ИЕ14 ЭП [07], работающей в режиме вычитания. Число m, с которого начинается подсчет импульсов, считывается со входов D0÷D3 микросхемы DD4 при поступлении на ее вход EWR сигнала записи с прямого выхода одновибратора DD2.1. Выбор значения числа m производится установкой переключателей S1÷S4 и записывается в двоичный счетчик во время защитного интервала. Сигнал на выходе CR двоичного счетчика появится с приходом (m+1)-го импульса на его счетный вход С. Задний фронт сигнала переноса CR поступает на тактовый вход D-триггера DD3.2. По этому сигналу на его выходе УПОР установится логическая единица. Это состояние выхода триггера будет сохраняться до поступления на его вход R очередного сигнала Step, по которому начнется новый цикл работы анализатора.
Для подтверждения работоспособности заявляемого технического решения было выполнено компьютерное моделирование работы принципиальной схемы возможного исполнения устройства, реализующего предлагаемый способ. При этом использовался программный пакет Micro-Cap (Microcomputer Circuit Analysis Program) для компьютерного моделирования аналоговых и цифровых электронных устройств [18, 19]. Полученные при компьютерном моделировании переходные процессы работы устройства для двух отрезков времени, когда происходит вращение электропривода без нагрузки и при достижении механического упора, приведены соответственно на фиг. 5 и фиг. 6. Здесь показаны эпюры напряжений, снимаемых в характерных точках электрической принципиальной схемы устройства. Анализ представленных на фиг. 5 и фиг. 6 осциллограмм показывает, что в случае, когда количество счетных импульсов, помещающееся на периоде пульсаций выходного напряжения датчика тока, меньше заданного порогового значения (числа m), на прямом выходе D-триггера DD3.2 (выходе УПОР устройства) установлен низкий потенциал (см. фиг. 5). Когда же количество счетных импульсов, помещающееся на периоде пульсаций выходного напряжения датчика тока, больше заданного порогового значения (числа m=13 в рассматриваемом примере), на прямом выходе D-триггера DD3.2 (выходе УПОР) устанавливается высокий потенциал (см. фиг. 6), что свидетельствует о достижении электроприводом механического упора.
Таким образом, использование предполагаемого изобретения позволяет существенно упростить процесс получения и преобразования информации для принятия решения о достижении электроприводом механического упора. Это соответственно позволяет упростить устройство, реализующее способ определения момента достижения электроприводом механического упора, и приводит к снижению аппаратных и программных затрат. Кроме того, достигается повышение помехозащищенности за счет использования информационного параметра, который резко изменяет свое значение при касании ротора ШД механического упора. Расширение области применения предлагаемого технического решения достигается возможностью его включения в отработанную и эксплуатирующуюся систему управления приводом без доработки драйвера ШД.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Принципы позиционирования для контроллеров шаговых двигателей. Руководство MA 1267-А005 EN ПЕРЕВОД АНГЛОЯЗЫЧНОГО РУКОВОДСТВА 06.2012 г. ООО «Микропривод».
http://www.microprivod.ru/assets/files/pdf/catalogue/phytron/phyMotion/Positioning-ru.pdf.
2. Губанова А.А., Гузаревич А.С., Таридонов Н.Е. Система управления шаговым двигателем // Электроника и электротехника. - 2018. - №2. - С. 41-47. DOI: 10.7256/2453-8884.2018.2.26014. URL: http://e-notabene.ru/elektronika/article_26014.html.
3. US 7880423 В2 «METHOD AND APPARATUS FOR STEPPER MOTOR STALL DETECTION». Date of Patent: Feb. 1, 2011.
4. US 9,013,133 B2 «METHOD AND APPARATUS FOR STEPPER MOTOR STALL, DETECTION». Date of Patent: Apr. 21, 2015.
5. Емельянов A.B., Шилин A.H. Шаговые двигатели: учебное пособие. Волг.ГТУ. Волгоград, 2005. ISBN №5-230-04591-4.
6. US 2006/0176007 Al «METHOD FOR STEPPER MOTOR POSITION REFERENCING». Pub. Date: Aug. 10, 2006.
7. US 7,239,108 B2 «METHOD FOR STEPPER MOTOR POSITION REFERENCING» Date of Patent: Jul. 3, 2007.
8. EP 3 261 245 A1 «METHOD AND ELECTRONIC CIRCUIT FOR STALL DETECTION». Date of publication 27.12.2017 Bulletin 2017/52.
9. Контроллеры шагового двигателя OSM-88RA Прошивка OSM MB Полное описание и руководство по эксплуатации Версия 15-0313.
http://onitex.ru/files/Documentation/OSM/datasheet_OSM88RA_rev.2.pdf
10. ACS724-Datasheet.pdf ACS724-DS, Rev. 8 www.allegromicro.com
11. Р70530 (DC) High Performance MicroStepping Drive AN2650 Application note Reference Guide Revision С 2/2012.
https://www.kollmorgen.com/sites/default/files/public_downloads/P70530%20DC%20Manual.pdf
12. AN2650 Application note L9942 stepper motor driver for bipolar stepper motors https://www.st.com/content/ccc/resource/technical/document/application_note/71/ed/ee/de/19/2c/40/74/CD00175369.pdf/files/CD00175369.pdf/jcr:content/translations/en.CD00175369.pdf
13. MIC7211.pdf http://ww1.microchip.com/downloads/en/DeviceDoc/mic7211.pdf
14. АЕЯР.431200.610-01 ТУ
15. бК0.347.064 ТУ32
16. Хоровиц П., Хилл У. Искусство схемотехники: Пер. с англ. - Изд. 2-е. - М.: Издательство БИНОМ. - 2014. - 704 с., ил.
17. АЕЯР.431200.610-16 ТУ
18. www.spectrum-soft.com
19. Амелина М.А., Амелин С.А.. Программа схемотехнического моделирования Micro-Cap. Версии 9, 10. - Смоленск, Смоленский филиал НИУ МЭИ, 2013. - 618 с., ил.
Высокотемпературная установка для испытаний механических свойств токопроводящих материалов
Способ экспериментального определения поправки к суммарному импульсу тяги двигателя при стендовых огневых испытаниях
Трубопровод горячего газа
Устройство соединения разделяемых элементов летательного аппарата
Ракетный двигатель твердого топлива с однократно изменяемым вектором тяги
Регулятор расхода горячего газа
Способ установки двух заслонок относительно регулируемых расходных отверстий газораспределительного клапана с одним валом и линейной расходной характеристикой
Поворотное управляющее сопло с гибким раскладным насадком
Регулятор давления
Способ охлаждения внутренней поверхности транспортно-пускового контейнера (тпк) при воздействии на нее продуктов сгорания стартового порохового аккумулятора давления (пад) при минометном старте твердотопливной ракеты и тпк для его осуществления
Способ определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем и устройство для его осуществления
Способ продления репродуктивного периода кур родительского стада
Способ определения положения якоря электромагнита и устройство для его осуществления
Способ управления электромагнитным клапаном и устройство для его осуществления
Способ стабилизации уровня тока в обмотке двухобмоточного шагового двигателя, работающего в полношаговом режиме, и драйвер для его осуществления
Способ контроля работы электропривода на основе двухобмоточного шагового двигателя, работающего в полношаговом режиме, и устройство для его осуществления

