Результат интеллектуальной деятельности: ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ
Вид РИД
Изобретение
Область техники. Изобретение относится к техническим средствам обучения механиков-водителей наземного транспорта, а конкретно к тренажерам для подготовки механиков-водителей подвижных комплексов вооружения (ПКВ) в процессе тактической, технической и огневой подготовки боевых расчетов подразделений противовоздушной обороны (ПВО), ракетных войск и артиллерии (РВ и А), береговых войск Военно-морского флота (ВМФ) РФ.
Уровень техники. Анализ известного /1-19/ уровня техники показал, что существующие тренажеры вождения ПКВ в основном предназначены для подготовки механиков-водителей танков, боевых машин пехоты (БМП) и бронетранспортеров (БТР) /RU 38069; RU 156963; RU 174171; RU 2009511; RU 2010341; RU 2396604/, составляющих основу мотострелковых и танковых войск.
Однако, существует значительное количество и других видов подвижных комплексов вооружения в РВ и А, войсках ПВО и береговых войсках ВМФ РФ. Причем шасси, на которых размещены комплексы вооружения, могут быть как гусеничными, так и колесными. Промышленность производит тренажеры для этих комплексов, но в основном они предназначены для подготовки боевых расчетов по применению вооружения /RU 42906; RU 126497; RU 144759; RU 146886; RU 156488/. Что касается тренажеров для подготовки механиков-водителей колесных шасси, то они в большей степени используются на автотранспортных предприятиях и в образовательных учреждениях профессиональной подготовки /RU 43990; RU 71758; RU 78352; RU 82910; RU 118094; RU 2467400/.
Таким образом, существует потребность в тренажерах для подготовки механиков-водителей ПКВ на гусеничном и колесном шасси следующих типов: ГМ-352М, ГМ-5975, ГМ-5955, ГМ-5969, ГМ-569, ГМ-577, ГМ-579, ГМ-380, МТ-ЛБ, МТ-ЛБу, ДТ-30, БАЗ-6402, БАЗ-6309, БАЗ-69092, КамАЗ-6560, МЗКТ-692200, МЗКТ-7930, МЗКТ-69221 для комплексов вооружения РВ и А, войск ПВО и береговых войск ВМФ.
Ближайшим аналогом, который можно принять за прототип, является «Динамический тренажер вождения танка» /RU 174171, кл G09B 9/04 , 17.04.2017/.
Известный тренажер /RU 174171/ для подготовки механиков-водителей подвижных комплексов вооружения (ПКВ) включает аппаратно-программный комплекс (АПК), рабочее место инструктора (РМИ), имитатор кабины механика-водителя (ИКМВ) танка, установленный на динамической платформе (ДП), соединенные цифровыми линиями связи через цифровой интерфейс.
При этом динамическая платформа (ДП) выполнена трехстепенной, аппаратно-программный комплекс тренажера содержит два вычислителя, объединенных между собой в единую локальную сеть посредством сетевого коммутатора. Рабочее место инструктора включает в себя два видеомонитора, к одному из которых подключены клавиатура и манипулятор «мышь». Имитатор кабины рабочего места механика-водителя танка выполнен с возможностью имитации пультовой аппаратуры, средств управления и визуализации для механика- водителя танка.
Недостатком известного /RU 174171/ тренажера являются его недостаточные функциональные возможности, из-за того, что он предназначен для обучения механиков-водителей исключительно одного вида ПКВ на гусеничном шасси, а именно механиков-водителей танков.
Задачей и техническим результатом изобретения является расширение функциональных возможностей тренажера путем обеспечения возможности обучения на нем механиков-водителей как колесных, так и гусеничных средств ПКВ с использованием единого АПК.
Сущность изобретения. Достижение заявленного технического результата и решение указанной задачи обеспечивается тем, что тренажер для подготовки механиков-водителей подвижных комплексов вооружения (ПКВ), содержит аппаратно-программный комплекс (АПК), рабочее место инструктора (РМИ) и имитатор кабины механика-водителя (ИКМВ), установленный на динамической платформе (ДП) и соединенный с АПК и РМИ через цифровой интерфейс связи.
Согласно изобретению АПК выполнен в виде электронно-вычислительной машины (ЭВМ), в интерфейсную плату сопряжения которой интегрированы блок моделей взаимодействия рабочих систем шасси ПКВ, блок моделей движения шасси ПКВ в виртуальном пространстве, блок моделей акселерационных нагрузок, блок моделей управления ДП, блок визуализации дорожной обстановки, а также модуль памяти с библиотеками упражнений, условий обстановки, базой данных программ обучения механиков-водителей ПКВ и оценки степени их обученности.
РМИ оснащено радиотелефонной гарнитурой голосовой связи инструктора с механиком-водителем ПКВ и содержит персональную электронно-вычислительную машину (ПЭВМ) инструктора, средства ввода программ обучения и устройство документирования, соединенные через АПК и универсальный цифровой интерфейс связи с имитационной аппаратурой ИКМВ и ДП.
При этом ИКМВ содержит дисплей для визуализации дорожной обстановки, имитатор средства наблюдения, имитаторы средств управления противопожарным оборудованием (ППО) и противоатомной защитой (ПАЗ), имитаторы средств управления системами шасси и его движением, имитаторы щитков приборов механика-водителя с элементами индикации и световой сигнализации, имитатор устройства ориентирования шасси на местности, имитатор воздушного пуска двигателя, измерительные устройства положения имитаторов органов управления с механизмами имитации нагрузок, а также устройства сопряжения указанных имитируемых органов управления и индикации (ОУИ) с АПК.
Динамическая платформа (ДП), на которой установлен ИКМВ, выполнена с шестью степенями свободы и содержит последовательно соединенные адаптер динамической платформы (АДП), шесть инверторов и шесть электродвигателей, валы которых являются кинематическими приводами ИКМВ и снабжены энкодерами для обратной сигнальной связи с адаптером.
Интерфейсные средства цифровой связи выполнены универсальными на базе сетевого протокола за счет упорядочивания и группирования однотипных функций, выполняемых механиком-водителем при управлении разными типами шасси, а также за счет моделирования и имитации функционирования однотипных систем шасси.
Доказательство достижения заявленного технического результата.
Выполнение АПК в виде ЭВМ, в интерфейсную плату сопряжения которой интегрированы блок моделей взаимодействия рабочих систем шасси ПКВ на гусеничном и колесном ходу, блок моделей движения различных видов шасси ПКВ в виртуальном пространстве, блок моделей акселерационных нагрузок на различные виды шасси, блок моделей управления ДП, имитирующих динамику перемещения ПКВ по пересеченной местности, блок визуализации дорожной обстановки, а также модуль памяти с библиотеками упражнений, условий обстановки, базой данных программ обучения механиков-водителей ПКВ, позволяет моделировать с высокой степенью подобия функционирование всех основных систем шасси ПКВ (силовой установки, трансмиссии, различных приводов трансмиссии, электрообобудования) при их управлении с имитатора рабочего места механика-водителя.
Моделируемое в АПК поведение гусеничного и колесного движителя в трехмерном виртуальном пространстве учитывает характеристики поверхности, включая скальный грунт, мягкий грунт, песок, болото, грязь.
Разработанные модели акселерационных нагрузок в совокупности с программными модулями управления исполнительными механизмами ДП 4 позволяют адекватно имитировать воздействие на механика-водителя силовых нагрузок, возникающих при движении шасси ПКВ по пересеченной местности.
Блок визуализации позволяет отображать на экранах имитаторов приборов наблюдения весь спектр наземной обстановки в дневных и ночных условиях как при имитации выполнения упражнений на танкодроме или автодроме, так и при имитации выполнения боевых задач, включая пыль, дым на местности, осадки (снег, дождь, туман различной интенсивности), следы на грунте от гусениц и колес, трассы полета снарядов, задымление при пуске ракет, разрывы снарядов и мин при стрельбе противника, горение пораженных объектов.
Разработанные библиотеки упражнений и условий обстановки содержат в себе комплекс упражнений Курса вождения боевых машин, а также учебных задач с фрагментами боевых действий.
Таким образом, разработанный АПК 1 позволяет с высокой степенью подобия моделировать и имитировать функционирование шасси ПКВ указанных типов без доработки и изменения программного обеспечения.
Оснащение РМИ радиотелефонной гарнитурой голосовой связи инструктора с механиком-водителем ПКВ, снабжение его ПЭВМ инструктора, средствами ввода программ обучения и устройством документирования, соединенным через АПК и универсальный цифровой интерфейс связи с имитационной аппаратурой ИКМВ и ДП позволили оперативно управлять процессом обучения и тренировки, моделировать типовые аварийные ситуации технического характера, а также фатальные ошибки, допускаемые механиком-водителем при управлении шасси ПКВ в различных условиях обстановки, документировать процесс выполнения упражнения обучаемыми с автоматической фиксацией ошибок, адекватно оценивать уровень обученности механиков-водителей с помощью адаптивной программы оценки, содержащей весь комплекс показателей и позволяющей выбрать их них требуемую совокупность для данной конкретной задачи (упражнения, комплекса упражнений).
Использование универсального адаптера ввода-вывода с оригинальным программным обеспечением в качестве устройства сопряжения имитируемых органов управления и индикации с ЭВМ позволяет создавать недорогие ИКМВ для шасси ПКВ указанных типов, легко интегрируемые с АПК.
Выполнение динамической платформы (ДП) с шестью степенями свободы позволяет имитировать углы наклона шасси и возникающие при имитации его движения акселерационные эффекты для всех перечисленных типов шасси ПКВ, устранить рывки, увеличить скорость перемещения ДП по степеням свободы и, тем самым, расширить функциональные возможности тренажера и качество обучения механиков-водителей за счет повышения качества имитации движения ПКВ в виртуальном пространстве.
Выполнение интерфейсных средств связи универсальными стало возможным за счет упорядочивания и группирования однотипных функций, выполняемых механиком-водителем, а также моделирования и имитации работы однотипных систем гусеничных и колесных машин. Они позволяют связать АПК с любым типом ИКМВ с помощью сетевого протокола, в котором прописаны все возможные правила обмена данными ЭВМ АПК с имитаторами органов управления и индикации в ИКМВ. Сетевой протокол позволяет интегрировать тренажеры для подготовки механиков-водителей в комплексные тренажеры боевых средств (комплексные тренажерные системы) без доработки программного обеспечения.
Следствием указанных технических преимуществ представленного тренажера является расширение его функциональных возможностей и решение проблемы создания тренажера для подготовки механиков-водителей подвижных комплексов вооружения (ПКВ) подразделений ПВО, РВ и А, береговых войск ВМФ РФ на базе единого аппаратно-программного комплекса (АПК) и средств имитации движения шасси ПКВ в виртуальном пространстве, приближенном к реальной климатической и боевой обстановке применения ПКВ.
Сущность изобретения поясняется чертежами, представленными на фиг. 1 - фиг. 6.
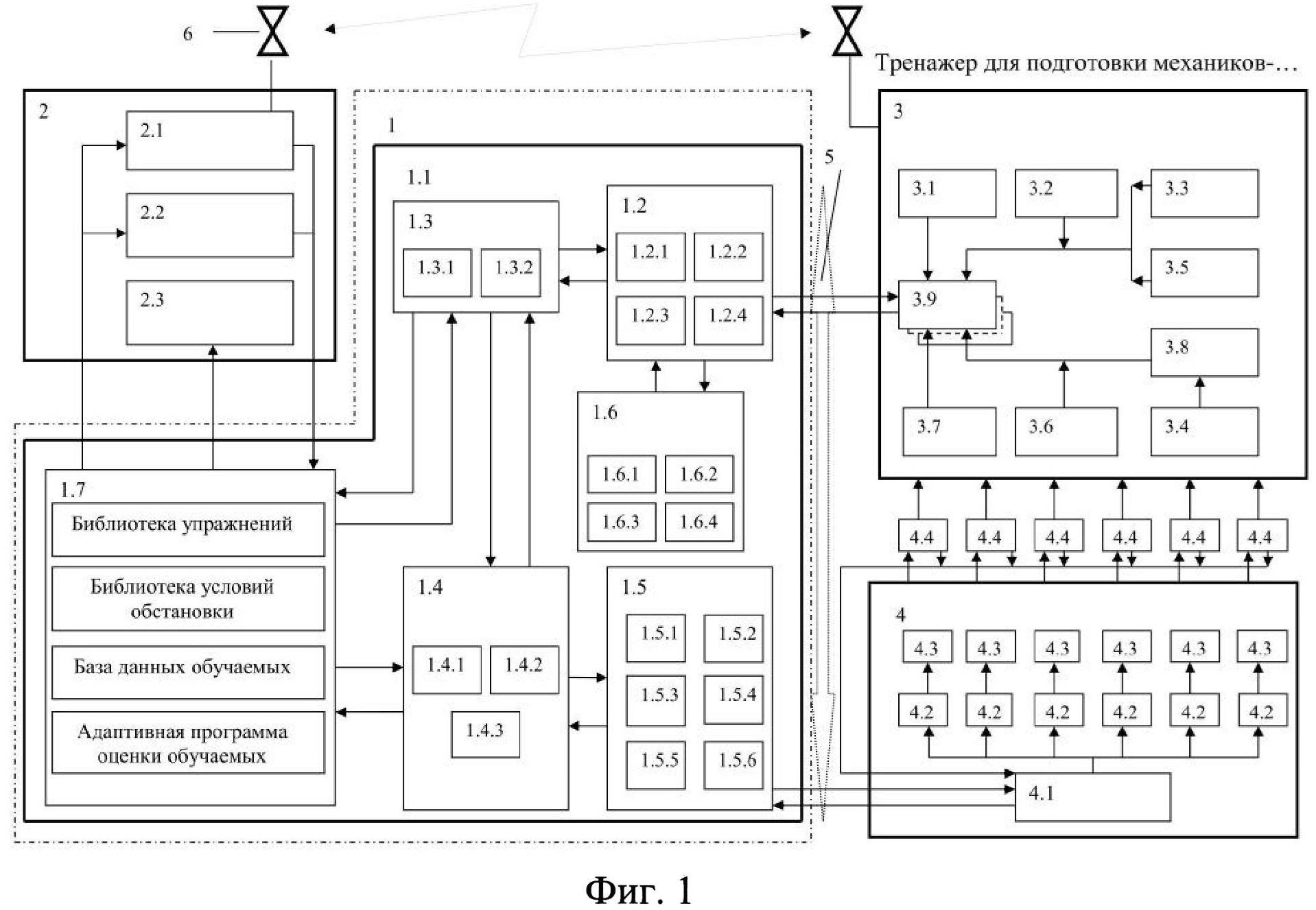
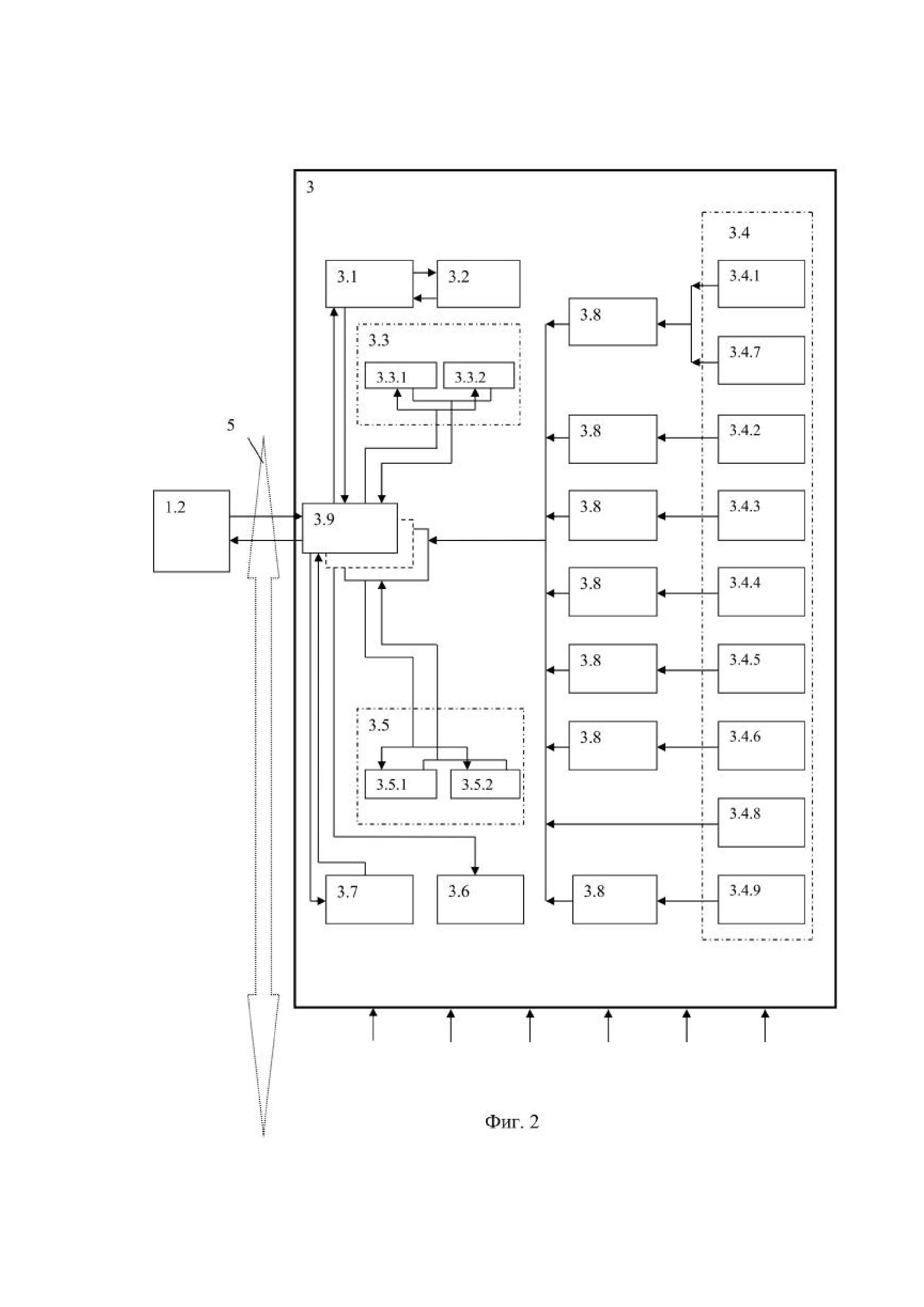
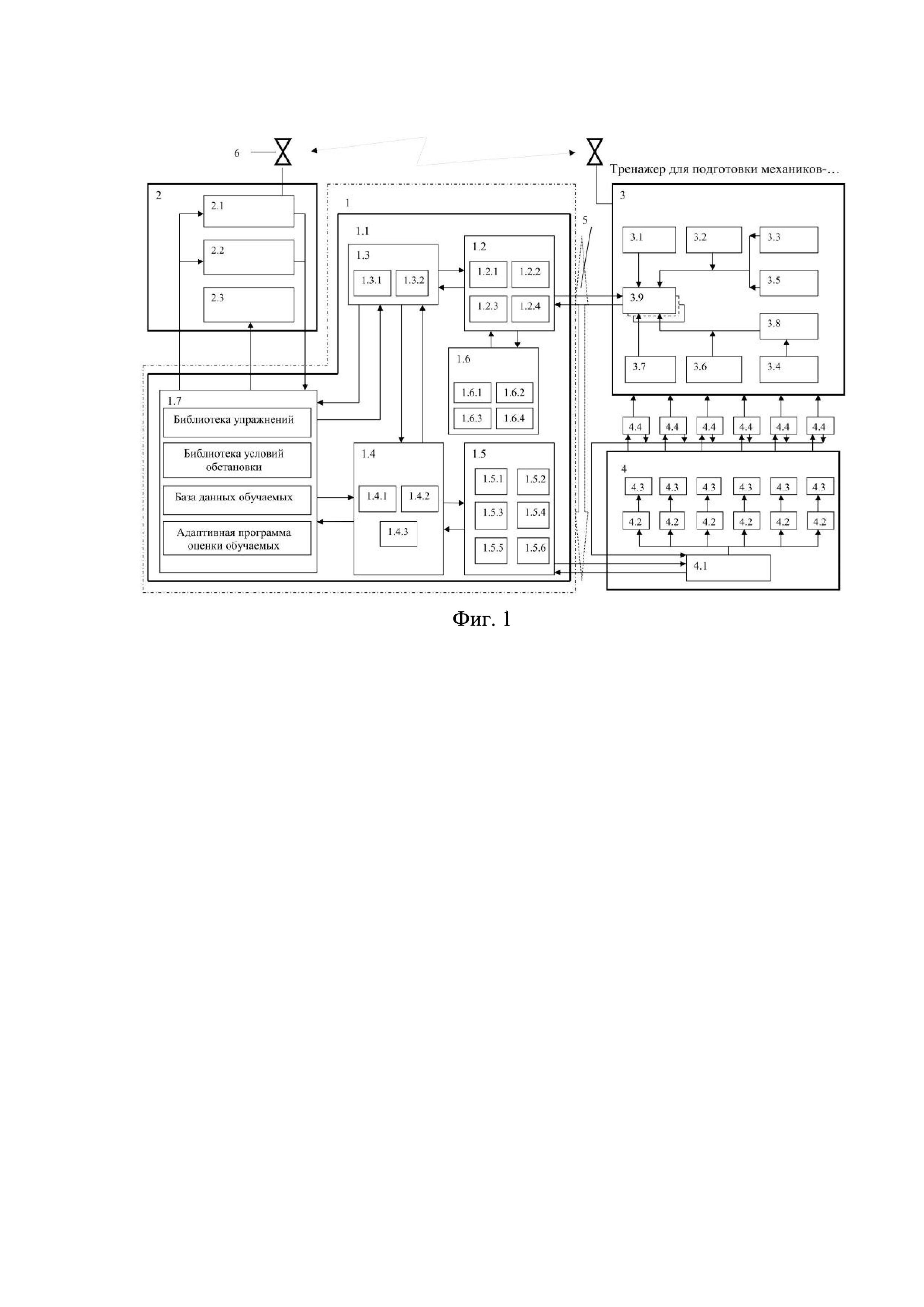
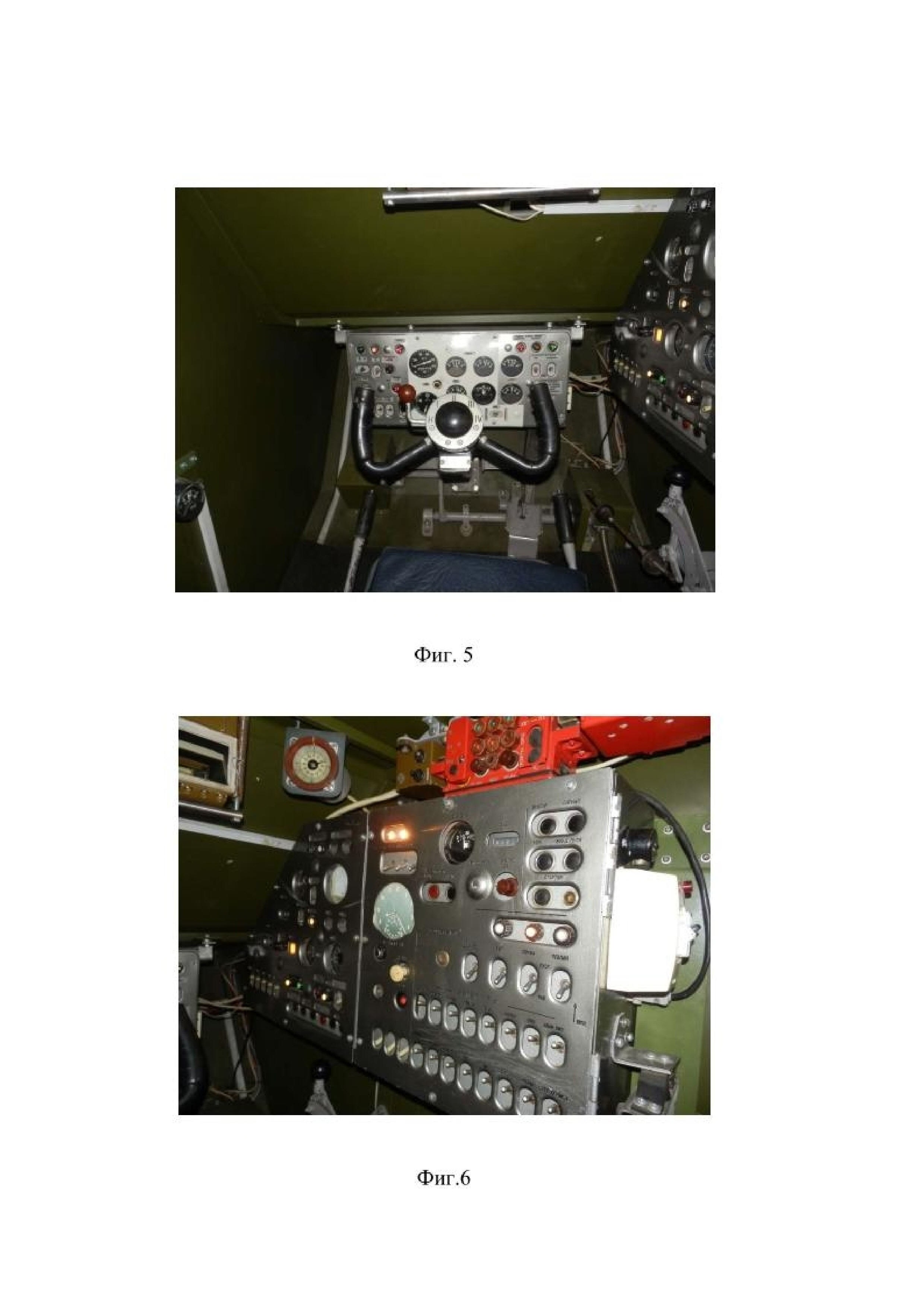
На фиг. 1 представлена функциональная схема тренажера для подготовки механиков-водителей подвижных комплексов вооружения, на фиг. 2 - функциональная схема имитатора 1 кабины механика-водителя (ИКМВ), на фиг. 3 - пример внешнего вида тренажера для подготовки механиков-водителей на трех степенной динамической платформе, на фиг. 4 - съемный имитатор рабочего места механика-водителя гусеничной машины ГМ-5955 боевой машины (БМ) зенитного ракетного комплекса (ЗРК) «Тор-М2МУ»; на фиг. 5 - съемный имитатор переднего щитка приборов механика-водителя ГМ-5955; на фиг. 6 - съемный имитатор бокового щитка приборов механика-водителя ГМ-5955.
На фиг. 1- 6 обозначены:
1 - аппаратно-программный комплекс (АПК) для имитации функционирования систем гусеничных (ГМ) и колесных машин (КМ) и их движения, визуализации дорожной обстановки для дневного и ночного вождения:
1.1 - интерфейсная плата сопряжения ЭВМ;
1.2 - блок моделей взаимодействия рабочих систем шасси ПКВ:
1.2.1 - модуль силовой установки с имитаторами двигателя, топливной системы, систем смазки и охлаждения, системы пуска двигателя;
1.2.2 - модуль трансмиссии с имитаторами гидромеханической передачи (ГМП), механизмов поворота, бортовых редукторов с тормозами, системы управления;
1.2.3 - модуль специальных приводов, включающий имитаторы привода стартера, редуктора отбора мощности (РОМ) и газотурбинного двигателя (ГТД);
1.2.4 - модуль электрооборудования шасси с имитаторами системы электрического пуска двигателя, приборов освещения, сигнализации и контрольно-измерительных приборов;
1.3 - блок моделей движения шасси ПКВ в виртуальном пространстве:
1.3.1 - модуль ходовой части с имитаторами гусеничного и колесного движителя, подвески и системы регулирования положения корпуса (СРПК) ПКВ;
1.3.2 - модуль характеристик виртуальной наземной поверхности движения шасси ПКВ;
1.4 - блок моделей акселерационных нагрузок:
1.4.1 - модуль имитации сил, действующих на шасси ПКВ;
1.4.2 - модуль имитации скоростей;
1.4.3 - модуль имитации ускорений для воспроизведения динамических эффектов, возникающих во время движения ПКВ на гусеничном и колесном ходу в трехмерном виртуальном пространстве;
1.5 - блок моделей управления динамической платформой (ДП);
1.6 - блок визуализации дорожной обстановки:
1.6.1 - модуль параметров местности с элементами инфраструктуры, естественными и искусственными препятствиями, включая горную, пустынную, равнинную, пересеченную, прибрежную, тундровую и городскую местность;
1.6.2 - модуль имитации атмосферных эффектов разной интенсивности, включая дождь, снег, туман;
1.6.3 - модуль имитации времени года и времени суток;
1.6.4 - модуль имитации визуальных эффектов, включая пыль, дым на местности, следы на грунте от гусениц и колес, трассы полета снарядов, задымление при пуске ракет, разрывы снарядов и мин при стрельбе противника по прикрываемым объектам, горение пораженных объектов;
1.7 - модуль памяти с библиотеками упражнений, условий обстановки, базой данных обучаемых и адаптивной программой оценки обучаемых;
2 - рабочее место инструктора (РМИ):
2.1 - персональная электронно-вычислительная машина (ПЭВМ) инструктора;
2.2 - средства ввода данных;
2.3 - устройство документирования;
3 - имитатор кабины механика-водителя (ИКМВ):
3.1 - дисплей для визуализации дорожной обстановки;
3.2 - имитатор средства наблюдения;
3.3 - имитаторы средств управления противопожарным оборудованием (ППО) и противоатомной защитой (ПАЗ):
3.3.1 - имитатор пульта управления и сигнализации типа П11-5;
3.3.2 - имитатор коробки управления КУВ11 нагнетателем фильтровентиляционной установки (ФВУ);
3.4 - имитатор средств управления системами шасси и его движением:
3.4.1 - имитатор рулевой колонки со штурвалом и рукояткой переключения передач;
3.4.2 - имитатор педали подачи топлива;
3.4.3- имитатор педали остановочного тормоза;
3.4.4 - имитаторы рычагов горного тормоза;
3.4.5 - имитатор рычага управления разъединительной муфтой ГМП;
3.4.6 - имитатор рычага РОМ;
3.4.7 - имитатор рукоятки ручного управления подачей топлива;
3.4.8 - имитатор рукоятки управления приводом жалюзи системы охлаждения двигателя;
3.4.9 - имитатор рукоятки управления насосом СРПК;
3.5 - имитаторы щитков приборов механика-водителя с элементами индикации и световой сигнализации:
3.5.1 - передний щиток рабочего места механика-водителя;
3.5.2 - боковой щиток рабочего места механика-водителя;
3.6 - имитатор устройства ориентирования шасси на местности (гирополукомпаса ГПК-59);
3.7 - имитатор воздушного пуска двигателя (баллон со сжатым воздухом и вентилем);
3.8 - измерительные устройства положения имитаторов рулевой колонки, педалей, рычагов и рукояток (энкодеры абсолютного положения типа MAB25 на эффекте Холла с разрешением 10 бит на оборот);
4 - динамическая платформа (ДП):
4.1 - адаптер динамической платформы;
4.2 - инверторы (устройства управления частотой вращения валов электродвигателей);
4.3 - электродвигатели;
4.4 - энкодеры (датчики обратной связи MAB25 на эффекте Холла с разрешением 10 бит);
5 - универсальный цифровой интерфейс связи имитатора 3 кабины механика-водителя (ИКМВ) и его динамической платформы (ДП) 4 с аппаратно-программным комплексом (АПК) 1 и с рабочим местом 4 инструктора (РМИ);
6 - средства связи инструктора с обучаемым механиком-водителем (радиотелефонная гарнитура).
Раскрытие сущности изобретения.
Согласно фиг. 1 - 6 тренажер для подготовки механиков-водителей подвижных комплексов вооружения (ПКВ) содержит аппаратно-программный комплекс (АПК) 1, рабочее место инструктора (РМИ) 2 и имитатор 3 кабины механика-водителя (ИКМВ), установленный на динамической платформе (ДП) 4 и соединенный с АПК 1 и РМИ 2 через цифровой интерфейс 5 связи.
Согласно изобретению АПК 1 выполнен в виде электронно-вычислительной машины (ЭВМ), в интерфейсную плату 1.1 сопряжения которой интегрированы блок 1.2 моделей взаимодействия рабочих систем шасси ПКВ, блок 1.3 моделей движения шасси ПКВ в виртуальном пространстве, блок 1.4 моделей акселерационных нагрузок, блок 1.5 моделей управления ДП 4, блок 1.6 визуализации дорожной обстановки, а также модуль памяти 1.7 с библиотеками упражнений, условий обстановки, базой данных программ обучения механиков-водителей ПКВ и адаптивной программой оценки степени их обученности.
При этом плата 1.1 сопряжения АПК 1 выполнена в виде двунаправленной активной шины сопряжения, связанной по управлению с ПЭВМ 2.1 инструктора.
Блок 1.2 моделей взаимодействия рабочих систем шасси АПК 1 содержит модуль 1.2.1 силовой установки, включающий имитаторы двигателя, топливной системы, системы смазки и охлаждения, пуска двигателя, модуль 1.2.2 трансмиссии, включающий имитаторы гидромеханической передачи (ГМП), механизмов поворота, бортовых редукторов с тормозами, системы управления, модуль приводов 1.2.3, включающий имитаторы привода стартера, редуктора отбора мощности (РОМ) и газотурбинного двигателя (ГТД), модуль электрооборудования шасси 1.2.4, включающий имитаторы системы электрического пуска двигателя, приборов освещения, сигнализации и контрольно-измерительных приборов.
Блок 1.3 моделей движения шасси ПКВ в виртуальном пространстве содержит модуль 1.3.1 ходовой части с соответствующим имитаторами гусеничного и колесного движителя, их подвески и системы регулирования положения корпуса, модуль 1.3.2 характеристик виртуальной наземной поверхности движения шасси, включая скальный грунт, мягкий грунт, песок, болото, грязь.
Блок 1.4 моделей акселерационных нагрузок, воздействующих на механика-водителя, содержит модуль 1.4.1 имитации сил, действующих на шасси, модуль 1.4.2 имитации скоростей и модуль 1.4.3 имитации ускорений, имитирующих величину динамических эффектов, возникающих во время движения шасси ПКВ в трехмерном виртуальном пространстве.
Используемая в блоке моделей акселерационных нагрузок разработанная заявителями динамическая подключаемая библиотека DLL (Dynamic Link Library) процедур и функций позволяет имитировать с помощью ДП любые виды движения ГМ (КМ) (вперед, назад, вверх, вниз, ускорение, торможение, вращение вокруг трех осей, крен, тангаж, рыскание и другие производные). Реализованные в библиотеке DLL процедуры и функции специфичны для данной конструкции динамической платформы, но в то же время универсальны для всей линейки имитируемых шасси. Это позволяет использовать совокупность АПК и ДП в качестве единой базовой платформы для изготовления тренажеров вождения различных типов шасси ПКВ.
Блок 1.5 моделей управления ДП 4 содержит шесть модулей 1.5.1-1.5.6 преобразования сигналов, зависящих от геометрических размеров ДП 4 и технических характеристик ее приводов, которые соединены по сигнальным входам с блоком 1.4 моделей акселерационных нагрузок, а по управляющим цифровым выходам имитации движения и нагрузок на кабину механика-водителя через последовательно соединенные адаптер 4.1, инверторы 4.2 и электродвигатели 4.3 ДП 4 с приводами ИКМВ 3.
Блок 1.6 визуализации АПК 1 содержит модуль 1.6.1 параметров местности с элементами инфраструктуры, естественными и искусственными препятствиями, включая горную, пустынную, равнинную, пересеченную, прибрежную, тундровую, городскую местность, модуль 1.6.2 атмосферных эффектов, включая дождь, снег, туман, модуль 1.6.3 времени года и времени суток, модуль 1.6.4 имитации визуальных эффектов, включая пыль, дым на местности, следы на грунте от гусениц и колес, трассы полета снарядов, задымление при пуске ракет, разрывы снарядов и мин при стрельбе противника по прикрываемым объектам, а также горения последних.
Модуль памяти 1.7 АПК 1 содержит библиотеки упражнений и условий обстановки, базу данных обучаемых и адаптивную программу оценки обучаемых, содержащую комплекс показателей и позволяющую выбрать из них требуемую совокупность для данной конкретной задачи (упражнения) обучения механиков-водителей ПКВ.
РМИ 2 оснащено радиотелефонной гарнитурой 6 голосовой связи инструктора с механиком-водителем ПКВ и содержит персональную электронно-вычислительную машину (ПЭВМ) 2.1 инструктора, средства 2.2 ввода программ обучения и устройство документирования 2.3, соединенные через АПК 1 и универсальный цифровой интерфейс 5 связи с имитационной аппаратурой ИКМВ 3 и ДП 4.
Средства 2.2 ввода данных РМИ 2 выполнены в виде клавиатуры, а его устройство документирования 2.3 - в виде принтера или флеш памяти.
При этом ИКМВ 3 содержит дисплей 3.1 для визуализации дорожной обстановки, имитатор 3.2 средства наблюдения, имитаторы 3.3 средств управления противопожарным оборудованием (ППО) и противоатомной защитой (ПАЗ), имитаторы 3.4 средств управления системами шасси и его движением, имитаторы 3.5 щитков приборов механика-водителя с элементами индикации и световой сигнализации, имитатор 3.6 устройства ориентирования шасси на местности, имитатор 3.7 воздушного пуска двигателя, измерительные устройства 3.8 положения имитаторов органов управления с механизмами имитации нагрузок, а также устройства сопряжения 3.9 указанных имитируемых органов управления и индикации с АПК 1.
Имитатор 3.2 средства наблюдения выполнен в виде перископического прибора дневного наблюдения ТНПО-168В и/или в виде прибора ТВН-5 ночного наблюдения.
Имитаторы 3.3 средств управления ППО и ПАЗ содержат имитатор 3.3.1 пульта управления и сигнализации типа П11-5, имитатор 3.3.2 коробки управления КУВ11 нагнетателем фильтровентиляционной установки.
Имитаторы 3.4 средств управления и движения шасси ПКВ содержат имитатор 3.4.1 рулевой колонки со штурвалом и рукояткой переключения передач, имитатор 3.4.2 педали подачи топлива, имитатор 3.4.3 педали остановочного тормоза, имитаторы 3.4.4 рычагов горного тормоза, имитатор 3.4.5 рычага управления разъединительной муфтой ГМП, имитатор 3.4.6 рычага РОМ, имитатор 3.4.7 рукоятки ручного управления подачей топлива, имитатор 3.4.8 рукоятки управления приводом жалюзи системы охлаждения двигателя, имитатор 3.4.9 рукоятки управления насосом системы регулирования положения корпуса (СРПК), соединенные через измерительные устройства 3.8 с устройствами сопряжения 3.9 имитируемых ОУИ с ЭВМ.
Имитаторы щитков 3.5 приборов механика-водителя с элементами индикации и световой сигнализации содержат передний 3.5.1 и боковой 3.5.2 щиток относительно рабочего места механика-водителя.
Имитатор 3.6 устройства для ориентирования шасси на местности выполнен в виде гирополукомпаса ГПК-59.
Имитатор 3.7 воздушного пуска двигателя выполнен в виде баллона со сжатым воздухом и вентилем.
Измерительные устройства 3.8 ИКМВ 3 положения имитаторов рулевой колонки, педалей, рычагов и рукояток выполнены в виде энкодеров абсолютного положения типа MAB25 на эффекте Холла с разрешением 10 бит на оборот.
Устройства сопряжения 3.9 имитируемых ОУИ с ЭВМ АПК 1 выполнены в виде универсального адаптера ввода-вывода (УА), включающего процессор с долговременным запоминающим устройством (ДЗУС) и оперативным запоминающим устройством (ОЗУ), соединенного по аналоговым входам/выходам через аналого-цифровой преобразователь (АЦП) и много контактную шину аналоговых сигналов с имитатором щитка или ОУИ механика-водителя, а по цифровым входам/выходам через цифро-аналоговый преобразователь (ЦАП), шину цифровых сигналов с портом USB или LAN связи с блоком 1.2 моделей АПК 1, причем в ДЗУС процессора устройства 3.9 встроена базовая программа оперативной обработки вводных/выводных сигналов, выполненная с возможностью упаковки/распаковки сигналов в «пакеты» и мультиплексирования проходящей через УА информации.
Такая конструкция УА в сочетании с оригинальным программным обеспечением позволяет реализовать любой ИКМВ 3 ПКВ подразделений войск ПВО, РВ и А, береговых войск ВМФ РФ с использованием не более 5-6 УА.
Аппаратура 1.2-1.6 АПК 1 и 3.1-3.7 ИКМВ 3 выполнена с возможностью имитации органов управления и индикации, условий движения и применения шасси ПКВ, включая гусеничные машины ГМ-352М, ГМ-5975, ГМ-5955, ГМ-5969, ГМ-569, ГМ-577, ГМ-579, ГМ-380, МТ-ЛБ, МТ-ЛБу, ДТ-30 и колесные машины БАЗ-6402, БАЗ-6309, БАЗ-69092, БАЗ-6909, БАЗ-69096, БАЗ-6909-022, БАЗ-6403, БАЗ-6306, КамАЗ-6560, МЗКТ-692200, МЗКТ-7930, МЗКТ-69221.
Динамическая платформа (ДП) 4, на которой установлен ИКМВ 3, выполнена с шестью степенями свободы и содержит последовательно соединенные адаптер 4.1, шесть инверторов 4.2 и шесть электродвигателей 4.3, валы которых являются кинематическими приводами ИКМВ 3 и снабжены энкодерами 4.4 для обратной сигнальной связи с адаптером 4.1.
Адаптер 4.1 ДП 4 выполнен в виде электронного устройства сопряжения и информационного обмена между блоком 1.5 моделей управления динамической платформой АПК 1, инверторами 4.2 и энкодерами 4.4, выполняющими функцию обратной связи.
Применение адаптера 4.1 в ДП 4 позволяет улучшить динамические характеристики платформы (устранить рывки и увеличить скорость ее перемещения) за счет уменьшения времени обработки потока сигналов, так как цикл обмена между адаптером 4.1 и инверторами 4.2 значительно короче, чем цикл обмена ЭВМ АПК 1 и инверторами 4.2 по стандартному протоколу.
Инверторы 4.2 ДП 4 выполнены в виде устройств управления частотой вращения валов электродвигателей 4.3.
Энкодеры 4.4 абсолютного положения ДП 4, как элементы обратной связи, выполнены типа MAB25 на эффекте Холла с разрешением 10 бит.
Использование шести степенной динамической платформы 4 с её элементами 4.1-4.4 позволяет имитировать углы наклона (крен, тангаж) до величин ±30°, а угол рыскания - до ±25°, характерных для типовых шасси ПКВ, применяемых в подразделениях ПВО, РВ и А, береговых войск ВМФ РФ.
Интерфейсные средства 5 цифровой связи выполнены универсальными за счет упорядочивания и группирования однотипных функций, выполняемых механиком-водителем при управлении разными типами шасси, а также за счет моделирования и имитации функционирования однотипных систем шасси.
Универсальный цифровой интерфейс 5 связи имитатора кабины механика-водителя (ИКМВ) 3 и его динамической платформы (ДП) 4 с аппаратно-программным комплексом (АПК) 1 имитации движения шасси ПКВ и через него с рабочим местом 2 инструктора (РМИ) разработан Заявителем на основе сетевого протокола Ehertnet и языка Delphi.
Универсальный интерфейс 5 связи позволил обеспечить оперативную передачу данных о состояния имитируемых органов управления и индикации с рабочего места механика-водителя ИКМВ 3 на АПК 1 и одновременно – обратную передачу данных о состоянии систем имитируемого шасси с АПК 1 на ИКМВ 3, а также данные о воздействии на шасси акселерационных нагрузок при имитации его движения с АПК 1 на ДП 4.
Таким образом, универсальный интерфейс 5 связи в совокупности с динамической подключаемой библиотекой DLL 1.4 процедур и функций позволил устанавливать на динамическую платформу имитаторы рабочих мест механиков-водителей всех существующих типов шасси ПКВ подразделений ПВО, РВ и А, береговых войск ВМФ РФ без переработки программного обеспечения тренажера.
Сетевой протокол, в свою очередь, позволяет интегрировать предлагаемый тренажер вождения ПКВ без существенной доработки его программного обеспечения в комплексный тренажер боевого средства или комплексную тренажерную систему для подготовки боевых расчетов (экипажей) ПКВ подразделений ПВО, РВ и А, береговых войск ВМФ РФ.
Средства 6 голосовой связи инструктора с механиком-водителем ПКВ выполнены в виде радиотелефонной гарнитуры.
Данное изобретение не ограничивается представленным примером его осуществления. В рамках данного изобретения возможны и другие варианты его осуществления и применения. Так АПК 1 и динамическая платформа 4 могут быть выполнены с возможностью имитации вождения воздушных и водных судов различного назначения с соответствующей доработкой программного обеспечения АПК 1 и динамической платформы 4 тренажера.
Описание работы тренажера. Представленный вариант конструкции тренажера для подготовки механиков-водителей подвижных комплексов вооружения (ПКВ) согласно фиг. 1 - 6 работает следующим образом.
Перед началом тренажа к АПК 1 выбирают требуемый имитатор 3 кабины механика-водителя (ИКМВ) с имитационными элементами 3.1-3.7 рабочего места механика-водителя. Далее ИКМБ 3 через устройство 3.9 сопряжения и универсальные интерфейсные средства 5 связи соединяют с АПК 1 и через него с рабочим местом инструктора (РМИ) 2 и динамической платформой 4.
Затем инструктор и механик-водитель ПКВ занимают свои рабочие места, связываются между собой через радиотелефонную гарнитуру 6. и включают аппаратуру тренажера. После выхода тренажерной аппаратуры 1-5 в рабочий режим инструктор вводит в базу данных обучаемых модуля памяти 1.7 сведения о прибывшем впервые на тренировку механике-водителе или выбирает из нее обучаемого при повторных тренировках. Далее инструктор выбирает из библиотеки упражнение Курса вождения боевых машин или иную учебно-тренировочную задачу (УТЗ), подлежащую отработке, а из библиотеки условий обстановки выбирает требуемые для условий задачи.
В интерфейсе тренажера инструктор выбирает тип шасси ПКВ, вождению которого предстоит обучение, и тем задает в блоках 1.2-1.4, 1.6 АПК 1 требуемые модели имитации.
Обучаемый механик-водитель проверяет исходное положение органов управления, запускает силовую установку и задействует требуемые для начала движения в заданных условиях обстановки органы управления.
Инструктор на своем рабочем месте запускает упражнение. Механик-водитель управляет движением шасси в виртуальном пространстве в соответствии с условиями упражнения (УТЗ), наблюдая за дорожной обстановкой в имитатор 3.2 прибора наблюдения. Инструктор дает вводные, моделируя типовые аварийные ситуации технического характера и контролирует действия обучаемого по их устранению.
По окончании выполнения упражнения инструктор документирует результаты тренировки в виде протокола, в котором автоматически зафиксированы допущенные ошибки и выведена итоговая оценка в соответствии с требованиями Курса вождения боевых машин и Программы боевой подготовки.
Тренировки механиков-водителей на тренажере проводятся до получения необходимых устойчивых навыков вождения шасси ПКВ в условиях, приближенных к боевой обстановке, применения средств пожаротушения и защиты от оружия массового поражения, а также оперативного устранения типовых неисправностей систем шасси.
Результаты тренажа фиксируются устройством 2.3 документирования на бумажном и/или магнитном носителе информации.
Изобретение не ограничивается приведенным примером его осуществления. В рамках данного изобретения возможны и другие варианты исполнения тренажера, не выходящие за пределы первичных материалов заявки. В частности он может быть легко приспособлен для подготовки механиков-водителей существующих и перспективных средств движения подвижных комплексов вооружения (ПКВ) /1-3/ без существенной доработки АПК тренажера.
Промышленная применимость. Тренажер для подготовки механиков-водителей подвижных комплексов вооружения (ПКВ) разработан на уровне физической модели аппаратно-программного комплекса (АПК) 1 и модуля памяти 1.7 с библиотеками упражнений и условий обстановки. Отдельные элементы заявленного тренажера, такие как универсальный интерфейс связи 5 и универсальные адаптеры ввода-вывода, разработанные ранее Заявителем в рамках изобретений /RU 126497, RU 2666039/ и программы для ЭВМ /RU 2014612580/ прошли испытания в тренажерах ЗРК «Куб», «Бук», «Тор», ЗСУ «Шилка», «Тунгуска» и в прототипе комплексной тренажерной системы для подготовки специалистов ПВО. Также разработан и испытан Заявителем имитатор кабины механика-водителя гусеничной машины ГМ-5955 БМ ЗРК «Тор-М2МУ» на трех степенной динамической платформе (фиг. 3).
Проведенные испытания составных элементов тренажера для подготовки механиков-водителей ПКВ, а также его математической модели показали реализуемость предложенного изобретения и достижение заявленного технического результата, заключающегося в расширении функциональных возможностей тренажера для подготовки механиков-водителей ПКВ подразделений ПВО, РВ и А береговых войск ВМФ РФ.
Источники информации:
1. «Зенитное ракетное оружие мира», изд-во ИНТИРОСП, 2005 с.95-256.
2. Страхов А.Ф., Слипко Ю.Г. «Имитационно-моделирующие комплексы и тренажеры». «Вопросы радиоэлектроники», серия ОТ, вып.6, 2009, с.97-108.
3. Перевалов В.Н. «Тренажерный комплекс для подразделений ПВО», журнал «Военный парад». № 6 (108), 2011.
4. RU 101567, 10.06.2010.
5. RU 118094, 10.01.2012.
6. RU 2396604.
7. RU 2410756.
8. RU 2433483.
9. RU 89265.
10. RU 146886.
11. RU 43990.
12. US 3516175.
13. RU 101567.
14. RU 118094.
15. RU 43990.
16. US 3516175.
17. RU 126497.
18. RU 2666039.
19. RU 2014612580.

Комплексная тренажерная система для подготовки специалистов противовоздушной обороны
Способ лечения ингаляционной травмы в сочетании с ожогами шеи
Система безопасного мониторинга и диагностики систем управления железнодорожной автоматикой
Комплексная тренажерная система для подготовки специалистов противовоздушной обороны
Строительный блок конструктора
Способ хирургического лечения рубцовых деформаций шеи
Способ хирургического лечения множественных рубцовых деформаций кисти
Способ хирургического лечения тотальных глубоких ожогов туловища
Способ лечения донорской раны живота
Способ забора кожного трансплантата на животе
Способ наложения вакуумной повязки

