Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при парковке и к устройству помощи при парковке.
Уровень техники
[0002] Относительно этого вида технологии, известна технология, которая включает в себя обнаружение места, на котором может парковаться рассматриваемое транспортное средство, и представление доступного места для парковки пользователю в соответствии с уровнем приоритета, полученным с использованием предварительно зарегистрированной уникальной информации рассматриваемого транспортного средства и водителя (патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2009-205191A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, патентный документ 1 не содержит сведений относительно способа обработки, когда место для парковки не обнаруживается в качестве доступного места для парковки. Ввиду этого, проблема заключается в том, что даже если парковка фактически возможна на месте для парковки, место для парковки может не быть доступным.
[0005] Задача, которая должна решаться посредством настоящего изобретения, заключается в том, чтобы позволять использовать место для парковки, когда место для парковки фактически доступно, даже в случае, если место для парковки не обнаруживается в качестве доступного места для парковки.
Средство решения задач
[0006] Настоящее изобретение решает вышеуказанную задачу посредством обнаружения первого места для парковки, которое удовлетворяет предварительно заданному условию парковки, и когда информация выбора второго места для парковки, отличного от первого места для парковки, вводится, повторного обнаружения первого места для парковки.
Преимущества изобретения
[0007] Согласно настоящему изобретению, когда второе место для парковки, отличное от первого места для парковки, выбирается водителем, процесс обнаружения для первого места для парковки выполняется снова. Эта операция позволяет использовать место для парковки, когда место для парковки фактически доступно, даже в случае, если место для парковки не обнаруживается в качестве доступного места для парковки.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей пример системы помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры управления в системе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 3 является видом, иллюстрирующим пример позиций, в которых размещаются бортовые камеры согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4A является первым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4B является вторым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4C является третьим видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4D является четвертым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 5 является графиком, иллюстрирующим взаимосвязь между скоростью транспортного средства (V (км)) и расстоянием до точки взгляда (Y (м)).
Фиг. 6 является набором видов, иллюстрирующих примеры шаблонов (A), (B) и (C) парковки, к которым применяется процесс помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 7 является видом, иллюстрирующим пример информации помощи при парковке, представленной в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей первый пример процесса управления в процессе повторного обнаружения места для парковки.
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей второй пример процесса управления в процессе повторного обнаружения места для парковки.
Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей третий пример процесса управления в процессе повторного обнаружения места для парковки.
Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей четвертый пример процесса управления в процессе повторного обнаружения места для парковки.
Фиг. 12 является первым набором видов, иллюстрирующих примеры (A), (B) и (C) функционального экрана, представленного во время процесса повторного обнаружения места для парковки.
Фиг. 13 является вторым набором видов, иллюстрирующих примеры (A), (B) и (C) функционального экрана, представленного во время процесса повторного обнаружения места для парковки.
Осуществление изобретения
[0009] Далее описываются один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, настоящее изобретение описывается посредством примерной иллюстрации примера, в котором устройство помощи при парковке согласно настоящему изобретению применяется к системе помощи при парковке, оснащенной в транспортном средстве. Устройство помощи при парковке может применяться к портативному терминальному устройству (такому оборудованию, как смартфон и карманный персональный компьютер, PDA), выполненному с возможностью обмен информацией с бортовыми устройствами. Способ отображения информации помощи при парковке согласно настоящему изобретению может использоваться в устройстве помощи при парковке. Информация помощи при парковке, связанная с изобретением этого способа отображения, в частности, отображается с использованием дисплея 21.
Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения также может иметь полуавтоматический тип, в котором операция руления автоматически выполняется в то время, когда водитель выполняет операцию нажатия педали акселератора/тормоза. Помимо этого или альтернативно, устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения может иметь тип с дистанционным управлением, в котором транспортное средство без водителя паркуется на предварительно определенном месте для парковки посредством управления перемещением транспортного средства от внешнего оператора.
[0010] Фиг. 1 является блок-схемой системы 1000 помощи при парковке, имеющей устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Система 1000 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения помогает при операции перемещения (парковки) рассматриваемого транспортного средства на месте для парковки. Система 1000 помощи при парковке включает в себя камеры 1a-1d, устройство 2 обработки изображений, устройство 3 измерения дальности, устройство 5 ввода, устройство 100 помощи при парковке, контроллер 30 транспортного средства, приводную систему 40, датчик 50 угла поворота при рулении и датчик 60 скорости транспортного средства. Устройство 100 помощи при парковке включает в себя устройство 10 управления и устройство 20 вывода.
[0011] Устройство 20 вывода включает в себя дисплей 21. Эти компоненты соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией. Устройство 20 вывода информирует водителя в отношении информации помощи при парковке. Дисплей 21 уведомляет водителя в отношении информации помощи при парковке в соответствии с содержанием текста, содержанием выводимого изображения и/или формой выводимого изображения. Дисплей 21 согласно одному или более вариантов осуществления настоящего изобретения представляет собой дисплей с сенсорной панелью, имеющий функцию ввода и функцию вывода.
[0012] Устройство 10 управления устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения представляет собой конкретный компьютер, содержащий ROM (постоянное запоминающее устройство) 12, которое сохраняет программу помощи при парковке, CPU (центральный процессор) в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 12, так что он служит в качестве устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, и RAM (запоминающее устройство с произвольным доступом) 13, которое служит в качестве доступного устройства хранения данных.
[0013] Программа помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения представляет собой программу для выполнения процедуры управления для представления информации помощи при парковке, которая включает в себя информацию относительно доступных мест для парковки, на дисплее 21 и помощи при операции парковки рассматриваемого транспортного средства V на месте для парковки, заданном водителем. В программе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, место для парковки для парковки может автоматически задаваться.
Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения может применяться к системе автоматизированной парковки, с помощью которой транспортное средство автоматически паркуется посредством операций руления, акселератора и тормоза, а также может применяться к системе полуавтоматизированной парковки, с помощью которой часть операций руления, акселератора и тормоза выполняется вручную, а другие операции выполняются автоматически. В другом варианте осуществления настоящего изобретения, устройство 100 помощи при парковке может применяться к системе, которая помогает парковке посредством представления намеченного пути на место для парковки и навигации на основе инструкций рассматриваемого транспортного средства на место для парковки.
[0014] Устройство 10 управления устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения имеет функции выполнения процесса получения информации, процесса обнаружения доступных мест для парковки, процесса обнаружения рекомендованных мест для парковки, процесса управления отображением и процесса управления парковкой. Каждый из вышеуказанных процессов выполняется посредством взаимодействия программного обеспечения для реализации процесса и вышеописанных аппаратных средств.
[0015] Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления процесса помощи при парковке, выполняемого посредством системы 1000 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Триггер для начала процесса помощи при парковке не ограничен конкретным образом, и процесс помощи при парковке может быть инициирован посредством операции пускового переключателя устройства 100 помощи при парковке.
[0016] Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения имеет функцию для автоматического перемещения рассматриваемого транспортного средства V на место для парковки. В этом процессе согласно одному или более вариантов осуществления настоящего изобретения, используется устройство 5 ввода. Устройство 5 ввода включает в себя переключатель, к примеру, переключатель автоблокировки, который включается только при нажатии. Устройство 100 помощи при парковке имеет такую конфигурацию, в которой автоматизированное вождение рассматриваемого транспортного средства V выполняется, когда переключатель 51 автоблокировки нажимается, и автоматизированное вождение рассматриваемого транспортного средства V приостанавливается, когда нажатие переключателя 51 автоблокировки прекращается. Устройство 5 ввода согласно одному или более вариантов осуществления настоящего изобретения может располагаться в качестве бортового устройства в салоне транспортного средства. Помимо этого или альтернативно, устройство 5 ввода может быть сконфигурировано как портативное устройство, которое может носиться за пределами салона транспортного средства таким образом, что рассматриваемое транспортное средство V может управляться внешним оператором. Устройство ввода включает в себя устройство связи и может обмениваться информацией с устройством 100 помощи при парковке. Устройство ввода обменивается данными с устройством 100 помощи при парковке с использованием сигнала, включающего в себя уникальный идентификационный код. Устройство 100 помощи при парковке может находить позицию устройства 5 ввода, т.е. позицию водителя, который носит устройство 5 ввода, на основе уровня радиосигнала устройства 5 ввода и позиционной информации, в которую добавляется идентификационная информация.
[0017] На этапе 101, устройство 10 управления устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения получает изображения, захваченные посредством камер 1a-1d, присоединяемых к нескольким местам рассматриваемого транспортного средства V. Камеры 1a-1d захватывают изображения граничных линий мест для парковки рядом с рассматриваемым транспортным средством V и объектов, присутствующих вокруг мест для парковки. Камеры 1a-1d могут представлять собой CCD-камеры, камеры для съемки в инфракрасном диапазоне или другие соответствующие устройства формирования изображений. Устройство 3 измерения дальности может предоставляться в позиции, идентичной позиции любой из камер 1a-1d, или также может предоставляться в другой позиции. Устройство 3 измерения дальности может представлять собой радарное устройство, такое как радар миллиметрового диапазона, лазерный радар и ультразвуковой радар или сонар. Устройство 3 измерения дальности обнаруживает присутствие или отсутствие объектов, позиции объектов и расстояния до объектов на основе принимаемого сигнала радарного устройства. Такие объекты включают в себя помехи, пешеходов и другие транспортные средства вокруг транспортного средства. Принимаемый сигнал используется для того, чтобы определять то, представляет собой место для парковки или нет незанятое место (паркуется или нет транспортное средство на месте для парковки). Помехи могут обнаруживаться с использованием стереотехнологии движения посредством камер 1a-1d.
[0018] Фиг. 3 является видом, иллюстрирующим примерную компоновку камер 1a-1d, расположенных на рассматриваемом транспортном средстве V. В примере, проиллюстрированном на фиг. 3, камера 1a располагается в части решетки радиатора рассматриваемого транспортного средства V, камера 1d располагается около заднего бампера, и камеры 1b и 1c располагаются в нижних частях правого и левого боковых зеркал. Камеры 1a-1d могут представлять собой камеру, имеющую широкоугольную линзу с широким углом обзора.
[0019] На этапе 101, устройство 10 управления также получает сигналы измерения дальности из устройства 3 измерения дальности, которое может представлять собой множество модулей, присоединенных к нескольким местам рассматриваемого транспортного средства.
[0020] На этапе 102, устройство 10 управления устройства 100 помощи при парковке управляет устройством 2 обработки изображений таким образом, чтобы формировать снятое сверху изображение. На основе полученного множества захваченных изображений, устройство 2 обработки изображений формирует снятое сверху изображение, в котором окружающее состояние, включающее в себя рассматриваемое транспортное средство V и место для парковки для парковки рассматриваемого транспортного средства V, просматривается из виртуальной точки P обзора (см. фиг. 3) выше рассматриваемого транспортного средства V. Обработка изображений, выполняемая посредством устройства 2 обработки изображений, может проводиться, например, с использованием способа, раскрытого в работе "Development of Around View System, Proceedings of Society of JSAE Annual Congress, 116-07 (октябрь 2007 года), стр. 17-22, SUZUKI Masayasu, CHINOMI Satoshi, TAKANO Teruhisa". Один пример сформированного снятого сверху изображения 21a проиллюстрирован на фиг. 7, который описывается ниже. Этот чертеж иллюстрируют пример отображения, который одновременно отображает снятое сверху изображение 21a (вид сверху) вокруг рассматриваемого транспортного средства V и изображение 21b для мониторинга (нормальный вид) вокруг рассматриваемого транспортного средства V.
[0021] Снова ссылаясь на фиг. 2, на этапах 103 и 104, устройство 10 управления обнаруживает места для парковки на основе "условия парковки", которое предварительно задается. В одном или более вариантов осуществления настоящего изобретения, ниже описывается примерный случай, в котором процесс указания доступных мест для парковки и рекомендованного места для парковки представляет собой процесс обнаружения доступных мест для парковки и рекомендованного места для парковки. В одном или более вариантов осуществления настоящего изобретения, устройство 100 помощи при парковке (устройство 10 управления) обнаруживает места для парковки, которые удовлетворяют "условию парковки", чтобы за счет этого указывать "доступные места для парковки" и "рекомендованное место(а) для парковки". Процессы указания "доступных мест для парковки" и "рекомендованного места для парковки" не ограничены процессом обнаружения, и "доступные места для парковки", и "рекомендованное место(а) для парковки", которые должны обрабатываться, могут указываться с использованием идентификационной информации "доступных мест для парковки" и "рекомендованного места для парковки", которые обнаруживаются посредством внешнего устройства.
[0022] Сначала будет описано "условие парковки".
Условие парковки согласно одному или более вариантов осуществления настоящего изобретения включает в себя следующие элементы:
1. Условие обнаружения для линий парковочных рамок;
2. Условие обнаружения для мест для парковки;
3. Условие возможности парковки; и
4. Условие рекомендации по парковке.
[0023] "Условие обнаружения для линий парковочных рамок" представляет собой условие для обнаружения схемы, которая представляет места для парковки, из захваченных изображений поверхности дороги. "Условие обнаружения для мест для парковки" представляет собой условие для обнаружения мест для парковки из схемы поверхности дороги. "Условие возможности парковки" представляет собой условие для обнаружения доступных мест для парковки, на которых возможна парковка. "Условие рекомендации по парковке" представляет собой условие для сокращения доступных мест для парковки до рекомендованного места для парковки, на котором парковка рекомендуется для рассматриваемого транспортного средства V. Эти условия могут использоваться отдельно в качестве "условия парковки", или комбинация двух или более из этих условий также может использоваться в качестве "условия парковки".
[0024] На этапе 103, устройство 10 управления обнаруживает линии парковочных рамок для того, чтобы обнаруживать места для парковки, на основе изображений, захваченных посредством камер 1a-1d, и/или данных, принимаемых посредством устройства 3 измерения дальности, и использует эти информационные элементы для того, чтобы обнаруживать доступные места Me для парковки. В одном или более вариантов осуществления настоящего изобретения, доступные места для парковки обнаруживаются из изображений, захваченных посредством камер 1a-1d, но процесс обнаружения доступных мест для парковки не ограничен конкретным образом. В альтернативном варианте осуществления, информация может получаться из внешнего сервера, чтобы обнаруживать или указывать доступные места для парковки.
[0025] Ниже описывается способ обнаружения доступных мест Me для парковки. Устройство 10 управления определяет то, движется или нет рассматриваемое транспортное средство V в зоне, которая включает в себя места для парковки (такая зона также упоминается как "зона парковки" в дальнейшем), на основе скорости транспортного средства для рассматриваемого транспортного средства V. Например, когда скорость транспортного средства для рассматриваемого транспортного средства V составляет предварительно определенное пороговое значение скорости транспортного средства или меньше, и это состояние продолжается в течение предварительно определенного времени или больше, устройство 10 управления определяет то, что рассматриваемое транспортное средство V движется в зоне парковки. Устройство 10 управления определяет то, движется или нет рассматриваемое транспортное средство V в зоне парковки, на основе атрибута позиционной информации навигационной системы (не проиллюстрирована) (такой информации, что точка включена в автомобильную парковку). Когда обнаруженная позиционная информация имеет атрибут, который представляет зону парковки, к примеру, зону, включающую в себя места для парковки шоссе, например, выполняется определение в отношении того, что рассматриваемое транспортное средство V движется в зоне парковки. В одном или более вариантов осуществления настоящего изобретения, может выполняться определение в отношении того, представляет собой обнаруженная зона или нет зону, включающую в себя места для парковки, через связь с окружением транспортного средства, т.е., через так называемую связь между транспортным средством и дорожной инфраструктурой или связь между транспортными средствами.
[0026] Когда выполняется определение в отношении того, что рассматриваемое транспортное средство V движется в зоне парковки, устройство 10 управления обнаруживает сигнальные линии дорожной разметки на основе захваченных изображений, полученных для формирования снятого сверху изображения. Сигнальные линии дорожной разметки представляют граничные линии, которые задают рамки (области) мест для парковки. Устройство 10 управления выполняет обнаружение краев для захваченных изображений, чтобы вычислять яркостную разность (контрастность). Устройство 10 управления указывает пиксельную линию, имеющую яркостную разность в предварительно определенное значение или больше относительно снятого сверху изображения, и вычисляет ширину и длину линии. В одном или более вариантов осуществления настоящего изобретения, линии рамок, представляющие места для парковки, не обязательно могут быть белыми, и также могут использоваться другие цвета, такие как красный.
Устройство 10 управления обнаруживает линии, которые удовлетворяют следующему условию "1. Условие обнаружения для линий парковочных рамок", в качестве линий парковочных рамок. В одном или более вариантов осуществления настоящего изобретения, схема, которая удовлетворяет всем из (1)-(6), обнаруживается в качестве представления линий парковочных рамок. В альтернативном варианте осуществления, любые одно или более из (1)-(6) могут выбираться и применяться.
[0027] 1. Условие обнаружения для линий парковочных рамок
(1) Яркостная разность краев составляет предварительно определенное пороговое значение или больше.
(2) Угол линии составляет предварительно определенное пороговое значение или меньше.
(3) Ширина линии составляет предварительно определенное пороговое значение или меньше.
(4) Длина непрерывного края (линии) составляет предварительно определенное значение или больше.
(5) Яркостная разность шума между линиями меньше предварительно определенного порогового значения.
(6) Правдоподобность, представляющая вероятность в качестве линий парковочных рамок, вычисленных на основе значений количественной оценки/оценки вышеуказанных (1)-(5), составляет предварительно определенное значение или больше.
[0028] Устройство 10 управления обнаруживает места для парковки от возможных вариантов обнаруженных линий парковочных рамок с использованием известной технологии обработки изображений, такой как сопоставление с шаблоном. В частности, устройство 10 управления обнаруживает линии парковочных рамок, которые удовлетворяют следующему условию "2. Условие обнаружения для мест для парковки", в качестве мест для парковки. В одном или более вариантов осуществления настоящего изобретения, линии парковочных рамок, которые удовлетворяют всем из (1)-(3), обнаруживаются в качестве мест для парковки. Устройство 10 управления описывается как обнаруживающее места для парковки из возможных вариантов обнаруженных линий парковочных рамок с использованием известной технологии обработки изображений, такой как сопоставление с шаблоном, но один или более вариантов осуществления настоящего изобретения не ограничены этим, и места для парковки могут непосредственно обнаруживаться без обнаружения линий парковочных рамок. Например, незанятые места, имеющие предварительно определенный диапазон (размер), могут обнаруживаться в качестве мест для парковки, либо местоположения, в которых маневры при парковке выполнены в предыдущие разы, могут обнаруживаться в качестве мест для парковки. Если условие, которое предварительно задается для того, чтобы задавать вероятность мест для парковки, удовлетворяется, места для парковки могут непосредственно обнаруживаться без обнаружения линий парковочных рамок.
[0029] 2. Условие обнаружения для мест для парковки
(1) Линии, извлеченные в качестве возможных вариантов линий парковочных рамок, не включают в себя линию, имеющую длину, равную или большую первого порогового значения, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 15 (м)).
(2) Линии, извлеченные в качестве возможных вариантов линий парковочных рамок, не включают в себя линию, имеющую длину, равную или меньшую второго порогового значения, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 3-5 (м)), и пара приблизительно параллельных линий не включает в себя линию, имеющую длину, равную или большую третьего порогового значения, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 7 (м)).
(3) Линии, извлеченные в качестве возможных вариантов линий парковочных рамок, не включают в себя линию, имеющую длину, равную или меньшую четвертого порогового значения, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 2,5-5 (м)), и пара приблизительно параллельных линий не включает в себя линию, имеющую длину, равную или большую четвертого порогового значения, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 15 (м)).
Позиционная информация мест для парковки может сохраняться таким образом, что она включена в картографическую информацию навигационной системы, либо также может получаться из внешнего сервера или устройства управления инфраструктурных объектов (автомобильных парковок).
[0030] Фиг. 4A является первой схемой, иллюстрирующей пример процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Как проиллюстрировано на фиг. 4A, позиция движения рассматриваемого транспортного средства представляет собой P1, и скорость транспортного средства представляет собой V1. Устройство 10 управления обнаруживает места для парковки, на которых может парковаться рассматриваемое транспортное средство V, перемещающееся в направлении стрелки (указываемой вперед относительно рассматриваемого транспортного средства V). Позиция рассматриваемого транспортного средства V может быть представлена позицией центра V0 тяжести рассматриваемого транспортного средства V, позицией переднего бампера рассматриваемого транспортного средства V или позицией заднего бампера рассматриваемого транспортного средства V.
[0031] После обнаружения мест для парковки, устройство 10 управления сначала обнаруживает незанятые места для парковки с использованием обнаруживаемых данных из устройства 3 измерения дальности/устройства 2 обработки изображений в соответствии со следующим условием возможности парковки.
[0032] Устройство 10 управления сохраняет "условие возможности парковки" для извлечения доступных мест Me для парковки. "Условие возможности парковки" задается с точки зрения извлечения мест для парковки, на которых возможна парковка. "Условие возможности парковки" предпочтительно задается с точки зрения расстояния от рассматриваемого транспортного средства V, с точки зрения в отношении того, паркуются или нет другие транспортные средства, и с точки зрения присутствия или отсутствия помех. На основе "условия возможности парковки", устройство 10 управления обнаруживает доступные места Me для парковки, на которых может парковаться рассматриваемое транспортное средство V. Доступные места Me для парковки представляют собой места для парковки, на которых может парковаться рассматриваемое транспортное средство V.
[0033] 3. Условие возможности парковки
"Условие возможности парковки" согласно одному или более вариантов осуществления настоящего изобретения задается с точки зрения извлечения мест для парковки, на которых может парковаться рассматриваемое транспортное средство V.
(1) Расстояние находится в пределах предварительно определенного расстояния от рассматриваемого транспортного средства V.
(2) Место для парковки является незанятым.
(3) Помехи не присутствуют.
[0034] Устройство 10 управления определяет то, присутствуют или нет помехи на местах для парковки. В зоне парковки, проиллюстрированной на фиг. 4A, устройство 10 управления не обнаруживает места PR1, PR4, PR6 и PL3 для парковки в качестве доступных мест Me для парковки, поскольку другие транспортные средства паркуются на них. Аналогично, устройство 10 управления не обнаруживает место PR8 для парковки в качестве доступного места Me для парковки, поскольку помеха M1 присутствует на нем.
[0035] Устройство 10 управления обнаруживает место для парковки, на которое может перемещаться рассматриваемое транспортное средство V. Когда намеченный путь для перемещения рассматриваемого транспортного средства V на место для парковки может извлекаться, устройство 10 управления определяет то, что рассматриваемое транспортное средство V может парковаться на месте для парковки. Фиг. 4A иллюстрирует намеченный путь L, когда рассматриваемое транспортное средство V паркуется посредством автоматизированного вождения. Намеченный путь L представляет собой намеченный путь, по которому рассматриваемое транспортное средство V перемещается из текущей позиции в промежуточную позицию Mw, расположенную впереди рассматриваемого транспортного средства V, и перемещается задним ходом, чтобы завершать маневр при парковке на месте PL для парковки. Такой маневр при парковке включает в себя один или более поворотов для парковки. Места для парковки, намеченные пути на которые на поверхности дороги не могут получаться вследствие наличия помех, таких как стена, не обнаруживаются в качестве мест для парковки, на которых возможна парковка. Например, намеченный путь (представленный посредством стрелок L пунктирных линий) на место PL8 для парковки не может получаться, поскольку стена W представляет собой помеху. Ввиду этого устройство 10 управления не обнаруживает место PL8 для парковки в качестве доступного места Me для парковки.
[0036] Хотя не ограничено конкретным образом, в позиции P1 рассматриваемого транспортного средства V, устройство 10 управления обнаруживает места для парковки, которые расположены перед исходной позицией рассматриваемого транспортного средства V и принадлежат диапазону предварительно определенного расстояния от рассматриваемого транспортного средства V, в качестве доступных мест для парковки. Исходная позиция рассматриваемого транспортного средства V может свободно задаваться. Хотя не ограничено конкретным образом, на фиг. 4A, места PL2-PL5 и PR2-PR5 для парковки принадлежат диапазону обнаружения доступных мест Me для парковки. Устройство 10 управления может быть сконфигурировано таким образом, чтобы не обнаруживать место PL1 для парковки в качестве доступного места Me для парковки, поскольку место PL1 для парковки должно быть расположено позади рассматриваемого транспортного средства V в пределах определенного времени. Диапазон обнаружения может быть расширен в соответствии с рабочими характеристиками камер 1a-1d и устройства 3 измерения дальности. Хотя не ограничено конкретным образом, устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения представляет информацию парковки относительно этого диапазона обнаружения водителю. Следует понимать, что диапазон обнаружения не ограничен диапазоном мест PL2-PL5 и PR2-PR5 для парковки и также, например, может представлять собой диапазон мест PL1-PL8 и PR1-PR8 для парковки. Диапазон обнаружения может быть ограничен диапазоном, который включает в себя места PR1 для парковки в PR8 в правой стороне от рассматриваемого транспортного средства V и также может быть ограничен диапазоном, который включает в себя место PL1 для парковки в PL8 в левой стороне от рассматриваемого транспортного средства V.
[0037] Хотя не ограничено конкретным образом, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения обнаруживает те из мест для парковки, которые являются незанятыми (другие транспортные средства не паркуются) и принадлежат предварительно определенному диапазону обнаружения, и для которых могут извлекаться намеченные пути L, в качестве доступных мест Me для парковки. Такая ситуация, что намеченные пути L могут извлекаться, означает такое условие, что траектории намеченных путей L могут подготавливаться посредством рендеринга в системе координат поверхности дороги без препятствия для помех (включающих в себя припаркованные транспортные средства).
[0038] В примере, проиллюстрированном на фиг. 4A, устройство 10 управления обнаруживает места PL2, PL4, PL5, PR2, PR3 и PR5 для парковки в качестве доступных мест Me для парковки в диапазоне обнаружения. Обнаруженные доступные места Me для парковки отображаются с помощью круга Me с пунктирной линией, который представляет собой метку доступности парковки.
[0039] Затем, процедура переходит к этапу 104, на котором устройство 10 управления обнаруживает рекомендованное место Mr для парковки в соответствии со следующим условием рекомендации по парковке.
[0040] 4. Условие рекомендации по парковке
"Условие рекомендации по парковке" согласно одному или более вариантов осуществления настоящего изобретения задается с точки зрения извлечения места для парковки, для которого затраты, требуемые для парковки (также называемые "связанными с парковкой затратами", здесь и в дальнейшем), являются низкими.
(1) Число поворотов для парковки составляет предварительно определенное число или меньше.
(2) Время, требуемое для парковки, составляет предварительно определенное время или меньше.
(3) Проезжаемое расстояние, требуемое для парковки, составляет предварительно определенное расстояние или меньше.
[0041] Устройство 10 управления обнаруживает рекомендованное место Mr для парковки в соответствии с состоянием движения рассматриваемого транспортного средства V из обнаруженного множества доступных мест для парковки. Устройство 10 управления сохраняет "условие рекомендации по парковке" для извлечения рекомендованного места Mr для парковки. "Условие рекомендации по парковке" задается с точки зрения извлечения места для парковки, для которого связанные с парковкой затраты являются низкими. "Условие рекомендации по парковке" предпочтительно задается с точек зрения числа поворотов для парковки, времени, требуемого для парковки, и проезжаемого расстояния, требуемого для парковки. На основе "условия рекомендации по парковке", устройство 10 управления извлекает рекомендованное место Mr для парковки, для которого связанные с парковкой затраты являются низкими, из числа доступных мест для парковки.
[0042] Ниже описывается способ обнаружения рекомендованного места Mr для парковки. Устройство 10 управления вычисляет связанные с парковкой затраты для каждого доступного места для парковки. Связанные с парковкой затраты включают в себя затраты, которые связаны со временем, требуемым для парковки, числом операций, требуемых для парковки (к примеру, числом операций руления и числом операций нажатия педали тормоза/акселератора), и проезжаемым расстоянием, требуемым для парковки. Устройство 10 управления получает намеченный путь для парковки на каждом доступном месте Me для парковки и вычисляет время, требуемое для парковки, число операций и проезжаемое расстояние по намеченному пути. Устройство 10 управления вычисляет связанные с парковкой затраты на основе результатов вычисления каждого намеченного пути.
[0043] Устройство 10 управления вычисляет намеченный путь при парковке рассматриваемого транспортного средства V на каждом доступном месте Me для парковки. Намеченный путь представляет собой траекторию из позиции, в которой начинается процесс помощи при парковке (начальной позиции), в позицию, в которой рассматриваемое транспортное средство V прибывает в позицию завершения парковки на каждом доступном месте Me для парковки. Устройство 10 управления задает начальную позицию для каждого доступного места Me для парковки. Устройство 10 управления вычисляет намеченный путь из начальной позиции на каждое доступное место Me для парковки. Число намеченных путей для автоматизированного вождения не ограничено одним, и устройство 10 управления может вычислять множество намеченных путей в соответствии с окружающими ситуациями.
[0044] Связанные с парковкой затраты отличаются, к примеру, затраты, которые связаны с числом поворотов для парковки по намеченному пути, длиной намеченного пути, временем для прохождения намеченного пути (временем для парковки) и максимальным углом поворота при рулении, которые вычисляются для каждого доступного места Me для парковки. Чем меньше число поворотов для парковки, тем меньше время, требуемое для парковки (связанные с парковкой затраты являются небольшими). Чем короче длина намеченного пути, тем меньше время, требуемое для парковки (связанные с парковкой затраты являются небольшими). Чем меньше максимальный угол поворота при рулении, тем меньше время, требуемое для парковки (связанные с парковкой затраты являются небольшими). С другой стороны, чем больше число поворотов для парковки, тем больше время, требуемое для парковки (связанные с парковкой затраты являются большими). Чем больше длина намеченного пути, тем больше время, требуемое для парковки (связанные с парковкой затраты являются большими). Чем больше максимальный угол поворота при рулении, тем больше время, требуемое для парковки (связанные с парковкой затраты являются большими).
[0045] Ниже приводится описание, например, для примерного случая, в котором рассматриваемое транспортное средство V паркуется на доступном месте PL6 или PL7 для парковки, проиллюстрированном на фиг. 4A. Расстояние от места PL7 для парковки до стены W меньше расстояния от места PL6 для парковки до стены W. Число поворотов для парковки при парковке на месте PL7 для парковки превышает число поворотов для парковки при парковке на месте PL6 для парковки (связанные с парковкой затраты являются более высокими в первом случае). Время, требуемое для парковки на месте PL7 для парковки, превышает время, требуемое для парковки на месте PL6 для парковки (связанные с парковкой затраты являются более высокими в первом случае).
[0046] Устройство 10 управления вычисляет связанные с парковкой затраты (включающие в себя время для парковки) для парковки на каждом доступном месте для парковки и сохраняет связанные с парковкой затраты таким образом, что они ассоциированы с идентификатором каждого доступного места для парковки. Устройство 10 управления вычисляет связанные с парковкой затраты для парковки на каждом доступном месте Me для парковки с использованием одного или более из связанных с парковкой затрат в соответствии с числом поворотов для парковки по намеченному пути, связанных с парковкой затрат в соответствии с длиной намеченного пути, связанных с парковкой затрат в соответствии со временем для прохождения намеченного пути (временем для парковки) и связанных с парковкой затрат в соответствии с максимальным углом поворота при рулении. Каждые связанные с парковкой затраты могут вычисляться таким образом, что взвешивание задается в соответствии с типом.
[0047] После этого обнаруживается рекомендованное место для парковки в соответствии с расстоянием до точки взгляда.
Устройство 10 управления вычисляет расстояние до точки взгляда на основе скорости транспортного средства для рассматриваемого транспортного средства V. Расстояние до точки взгляда означает расстояние от позиции рассматриваемого транспортного средства V до позиции (точки взгляда), на которую смотрит водитель рассматриваемого транспортного средства V. Устройство 10 управления обнаруживает место для парковки, соответствующее позиции, на которую смотрит водитель, в качестве рекомендованного места для парковки.
[0048] В общем, чем выше скорость транспортного средства, тем дальше смотрит водитель, и чем ниже скорость транспортного средства, тем ближе смотрит водитель. С точки зрения рекомендации места для парковки в соответствии с точкой наблюдения водителя, устройство 10 управления задает большее расстояние до точки взгляда по мере того, как скорость транспортного средства для рассматриваемого транспортного средства V является более высокой, и задает меньшее расстояние до точки взгляда по мере того, как скорость транспортного средства для рассматриваемого транспортного средства V является более низкой. Это обеспечивает возможность выполнения помощи при парковке на месте для парковки в соответствии с намерением водителя. Расстояние до точки взгляда не обязательно является линейным и также может задаваться вдоль кривой. Направление расстояния до точки взгляда может задаваться в соответствии с углом поворота при рулении рассматриваемого транспортного средства V.
[0049] Фиг. 5 является графиком, иллюстрирующим взаимосвязь между скоростью транспортного средства (V [км/ч]) и расстоянием до точки взгляда (Y (м)). Сплошная линия представляет вышеуказанную взаимосвязь, когда скорость транспортного средства увеличивается, тогда как когда пунктирная линия представляет вышеуказанную взаимосвязь, когда скорость транспортного средства уменьшается. Как проиллюстрировано на фиг. 5, когда скорость транспортного средства составляет Va или ниже, расстояние до точки взгляда составляет Ya. Также, когда скорость транспортного средства составляет Va или выше и Vc или ниже, расстояние до точки взгляда составляет Ya. Когда скорость транспортного средства составляет Vc или выше и Vd или ниже, расстояние Y до точки взгляда увеличивается пропорционально скорости V транспортного средства. Когда скорость транспортного средства Vd или выше, расстояние до точки взгляда составляет Yb. С другой стороны, когда скорость транспортного средства понижается ниже Vd, расстояние до точки взгляда уменьшается вдоль пунктирной линии по фиг. 5. Хотя скорость транспортного средства понижается с Vd до Vb, расстояние до точки взгляда составляет Yb. В то время, когда скорость транспортного средства понижается с Vb до Va, расстояние Y до точки взгляда уменьшается пропорционально скорости V транспортного средства. Таким образом, взаимосвязь между скоростью V транспортного средства и расстоянием Y до точки взгляда имеет гистерезисную характеристику между направлением увеличения и направлением уменьшения скорости V транспортного средства.
[0050] ROM 12 устройства 10 управления сохраняет карту (например, взаимосвязь, проиллюстрированную на фиг. 5) между скоростью V транспортного средства и расстоянием Y до точки взгляда. Устройство 10 управления получает информацию относительно скорости V транспортного средства из датчика 60 скорости транспортного средства и обращается к карте, чтобы вычислять расстояние Y до точки взгляда в соответствии со скоростью V транспортного средства. Устройство 10 управления обнаруживает место для парковки около точки взгляда, которая отстоит от рассматриваемого транспортного средства V на расстояние Y до точки взгляда (т.е. место для парковки расположено в пределах предварительно определенного расстояния от точки взгляда).
[0051] Если скорость транспортного средства уменьшается, когда рекомендованное место для парковки представляется, расстояние до точки взгляда водителя уменьшается, и точки взгляда приближается к рассматриваемому транспортному средству V (перемещается к ближней стороне рассматриваемого транспортного средства V). Если в ответ на этот приближение точки взгляда, рекомендованное место для парковки должно изменяться из удаленного (например, места PL5 для парковки) на близлежащее (например, место PL4 для парковки), позиция рекомендованного места Mr для парковки должна перемещаться в направлении приближения к рассматриваемому транспортному средству V (в обратном направлении), даже если рассматриваемое транспортное средство V перемещается вперед на экране. Такое перемещение рекомендованного места Mr для парковки является неестественным и может смущать водителя. Как проиллюстрировано на фиг. 5, устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения спроектировано таким образом, что расстояние до точки взгляда, когда скорость транспортного средства уменьшается, имеет гистерезисную характеристику. Такая гистерезисная характеристика обеспечивает возможность поддержания расстояния Yd до точки взгляда, даже когда скорость транспортного средства уменьшается. Это позволяет предотвращать неестественное отображение таким образом, что позиция рекомендованного места Mr для парковки перемещается назад в направлении движения рассматриваемого транспортного средства V и приближается к рассматриваемому транспортному средству V. В устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, вышеописанное условие рекомендации по парковке может включать в себя расстояние до точки взгляда. Это обеспечивает рекомендацию места для парковки в соответствии с точкой наблюдения водителя.
[0052] Фиг. 4B иллюстрирует состояние, в котором рассматриваемое транспортное средство V перемещается вперед из позиции P1, проиллюстрированной на фиг. 4A, в позицию P2. Скорость рассматриваемого транспортного средства V в позиции P2 составляет V2 (<V1). Устройство 10 управления обращается к карте, чтобы вычислять расстояние до точки взгляда, соответствующее скорости V2 транспортного средства. Устройство 10 управления указывает точку G2, которая отстоит от позиции P2 на расстояние до точки взгляда, в качестве точки (G2) взгляда. Рассматриваемое транспортное средство V находится в состоянии выбора места для парковки с пониженной скоростью V2 транспортного средства (<V1). Расстояние между точкой G2 взгляда и рассматриваемым транспортным средством V меньше расстояния между точкой G1 взгляда, проиллюстрированной на фиг. 4A, и рассматриваемым транспортным средством V, поскольку скорость транспортного средства понижается.
[0053] В состоянии, проиллюстрированном на фиг. 4B, устройство 10 управления обнаруживает рекомендованное место для парковки из числа мест PL2, PL4, PL5, PR2, PR3 и PR5 для парковки около точки G2 взгляда. Парковка возможна на этих местах для парковки. Устройство 10 управления обнаруживает рекомендованное место для парковки на основе связанных с парковкой затрат для каждого из мест PL2, PL4, PL5, PR2, PR3 и PR5 для парковки.
[0054] Устройство 10 управления назначает идентификационные номера для доступных мест Me для парковки около точки G2 взгляда. Устройство 10 управления вычисляет связанные с парковкой затраты для парковки на каждом доступном месте Me для парковки. Устройство 10 управления может считывать связанные с парковкой затраты для парковки, которые ранее вычислены. Связанные с парковкой затраты для парковки на каждом доступном месте Me для парковки отражают нагрузку, к примеру, время для парковки, требуемое для перемещения рассматриваемого транспортного средства V на место для парковки посредством автоматизированного вождения, число операций и расстояние перемещения. Связанные с парковкой затраты для парковки представляют собой индекс, отличающийся от уровня сложности, когда водитель завершает маневр при парковке. Устройство 10 управления вычисляет время, требуемое для парковки на каждом доступном месте Me для парковки. В примере по фиг. 4B, устройство 10 управления вычисляет время, требуемое для парковки на каждом из мест PL2, PL4, PL5, PR2, PR3 и PR5 для парковки, на которых возможна парковка, и сохраняет время, требуемое для парковки, таким образом, что оно ассоциировано с каждым идентификационным номером.
[0055] Устройство 10 управления сравнивает связанные с парковкой затраты для парковки на каждом доступном месте Me для парковки и предварительно определенное пороговое значение, которое предварительно задается. Предварительно определенное пороговое значение является верхним предельным пороговым значением связанных с парковкой затрат, которые включают в себя время, требуемое для парковки посредством автоматизированного вождения. Когда время (связанные с парковкой затраты), требуемое для парковки на доступном месте Me для парковки, меньше предварительно определенного порогового значения, устройство 10 управления обнаруживает доступное место Me для парковки в качестве рекомендованного места Mr для парковки. С другой стороны, когда время (связанные с парковкой затраты), требуемое для парковки на доступном месте Me для парковки, не меньше предварительно определенного порогового значения, устройство 10 управления не обнаруживает доступное место Me для парковки в качестве рекомендованного места Mr для парковки. Доступное место Me для парковки, для которого время, требуемое для парковки, является минимальным (связанные с парковкой затраты являются наименьшими), может обнаруживаться в качестве единственного рекомендованного места Mr для парковки.
[0056] Устройство 10 управления обнаруживает доступное место Me для парковки из доступных мест Me для парковки, для которых связанные с парковкой затраты являются наименьшими, в качестве рекомендованного места Mr для парковки. В примере, проиллюстрированном на фиг. 4B, место PL4 для парковки обнаруживается в качестве рекомендованного места Mr для парковки, поскольку связанные с парковкой затраты (время, требуемое для парковки) ниже предварительно определенного порогового значения, и точка взгляда является ближайшей (связанные с парковкой затраты являются наименьшими).
[0057] Устройство 10 управления выполняет процесс обнаружения для рекомендованного места Mr для парковки с предварительно определенным периодом. Как проиллюстрировано на фиг. 4C, также когда рассматриваемое транспортное средство V перемещается вперед в позицию P3 на скорости транспортного средства в V3, устройство 10 управления обнаруживает новое рекомендованное место Mr для парковки. Устройство 10 управления вычисляет новую точку взгляда G3 и связанные с парковкой затраты, требуемые для перемещения из текущей позиции на каждое доступное место Me для парковки, и обнаруживает место PL5 для парковки, для которого связанные с парковкой затраты являются наименьшими, в качестве рекомендованного места Mr для парковки.
[0058] На этапе 105, устройство 10 управления отображает доступные места Me для парковки и рекомендованное место Mr для парковки на дисплее 21. Ниже подробнее поясняется Способ отображения доступных мест Me для парковки и рекомендованного места Mr для парковки согласно одному или более вариантов осуществления настоящего изобретения.
[0059] На этапе 106, выполняется определение в отношении того, вводится или нет целевое место Mo для парковки. Целевое место Mo для парковки означает место для парковки, на котором рассматриваемое транспортное средство V паркуется посредством автоматизированного вождения, т.е. целевую позицию при автоматизированном вождении. Целевое место Mo для парковки вводится водителем или пассажиром (оператором/человеком, занимающим место в транспортном средстве). Например, когда дисплей 21 представляет собой дисплей с сенсорной панелью, водитель или пассажир касается участка, представляющего требуемое место для парковки, чтобы за счет этого указывать целевое место Mo для парковки, и информация относительно целевого места Mo для парковки вводится в устройство 10 управления. Когда целевое место Mo для парковки вводится на этапе 106, последовательность операций управления переходит к этапу 107. С другой стороны, когда целевое место Mo для парковки не вводится, последовательность операций управления возвращается к этапу 104, и выполняется последовательность операций управления от этапа 104 до этапа 106.
[0060] Когда целевое место Mo для парковки вводится, это место для парковки задается в качестве целевого места Mo для парковки на этапе S107.
[0061] На этапе 108, устройство 10 управления вычисляет намеченный путь для перемещения рассматриваемого транспортного средства V на целевое место Mo для парковки.
[0062] Фиг. 4D является видом, иллюстрирующим окружение, в котором место PL5 для парковки указывается в качестве целевого места Mo для парковки. Устройство 10 управления вычисляет намеченный путь для парковки на основе позиционной взаимосвязи между позицией P4 рассматриваемого транспортного средства V, в которой начинается маневр при парковке (перемещение), и позицией целевого места Mo для парковки. Хотя не ограничено конкретным образом, устройство 10 управления вычисляет намеченный путь, который включает в себя кривую L1 и кривую L2. Кривая L1 лежит от позиции остановки рассматриваемого транспортного средства V, т.е. позиции, в которой начинается помощь при парковке, до промежуточной позиции Mw, в которой выполняется поворот для парковки. Кривая L2 лежит от промежуточной позиции Mw до целевого места Mo (PL5) для парковки.
[0063] Устройство 10 управления считывает намеченные пути, соответствующие выбранному режиму парковки, и вычисляет намеченный путь на основе позиционной взаимосвязи между позицией рассматриваемого транспортного средства V при начале процесса автоматизированной парковки и позицией целевого места Mo для парковки. Когда водитель нажимает вышеописанный переключатель автоблокировки в ходе работы в режиме автоматизированной парковки, устройство 10 управления управляет контроллером 30 транспортного средства, чтобы выполнять процесс перемещения рассматриваемого транспортного средства V на целевое место Mo для парковки для вычисленного намеченного пути.
[0064] Устройство 10 управления вычисляет намеченный путь, соответствующий каждой из парковки (A) под прямым углом, параллельной парковки (B) и парковки (C) под непрямым углом, проиллюстрированной на фиг. 6. В одном или более вариантов осуществления настоящего изобретения, намеченный путь описывается как вычисляемый, но настоящее изобретение не ограничено этим. В альтернативном варианте осуществления, намеченный путь, соответствующий типу места для парковки, сохраняется в запоминающем устройстве (ROM), и намеченный путь может считываться при парковке. Намеченный путь и режим парковки (такой как парковка под прямым углом, параллельная парковка и парковка под непрямым углом) может выбираться водителем рассматриваемого транспортного средства V.
[0065] На этапе 109, устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения выполняет процесс помощи при парковке или процесс автоматизированной парковки. Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения управляет работой приводной системы 40 через контроллер 30 транспортного средства таким образом, что рассматриваемое транспортное средство V перемещается вдоль намеченного пути.
[0066] Устройство 100 помощи при парковке вычисляет сигналы команд управления в приводную систему 40 рассматриваемого транспортного средства V, к примеру, в электромотор электронного усилителя руля, при возврате выходного значения датчика 50 угла поворота при рулении устройства рулевого управления таким образом, что траектория движения рассматриваемого транспортного средства V совпадает с вычисленным намеченным путем, и отправляет сигналы команд управления в приводную систему 40 или в контроллер 30 транспортного средства, который управляет приводной системой 40.
[0067] Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения включает в себя модуль управления помощью при парковке. Модуль управления помощью при парковке получает информацию диапазона переключения передач из модуля AT/CVT-управления, информацию скорости вращения колес из модуля ABS-управления, информацию угла поворота при рулении из модуля управления углом поворота при рулении, информацию частоты вращения двигателя из ECM и другую необходимую информацию. На ее основе, модуль управления помощью при парковке вычисляет и выводит информацию с инструкциями по автоматизированному рулению в модуль управления электронного усилителя руля, информацию с инструкциями, такую как предупреждение, в модуль управления измерительными приборами и т.д. Устройство 10 управления получает информационные элементы, которые получаются посредством датчика 50 угла поворота при рулении устройства рулевого управления рассматриваемого транспортного средства V и датчика 60 скорости транспортного средства и других датчиков транспортного средства через контроллер 30 транспортного средства.
[0068] Приводная система 40 согласно одному или более вариантов осуществления настоящего изобретения обеспечивает возможность рассматриваемому транспортному средству V перемещаться (двигаться) из текущей позиции на целевое место Mo для парковки посредством вождения на основе сигналов команд управления, полученных из устройства 100 помощи при парковке. Устройство рулевого управления согласно одному или более вариантов осуществления настоящего изобретения представляет собой приводной механизм, который перемещает рассматриваемое транспортное средство V в направлениях вправо и влево. электромотор электронного усилителя руля, включенный в приводную систему 40, приводит в действие механизм усилителя рулевого управления устройства рулевого управления на основе сигналов команд управления, полученных из устройства 100 помощи при парковке, чтобы управлять величиной руления, и помогает при операции при перемещении рассматриваемого транспортного средства V на целевое место Mo для парковки. Содержание помощи при парковке и процесс работы не ограничены конкретным образом, и процессы, известные на момент подачи этой заявки, могут надлежащим образом применяться.
[0069] Когда устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения управляет рассматриваемым транспортным средством V таким образом, что оно перемещается на целевое место Mo для парковки по намеченному пути, вычисленному на основе позиции P4 рассматриваемого транспортного средства V и позиции целевого места Mo для парковки, акселератор и тормоз автоматически управляются на основе указанной управляющей скорости транспортного средства (заданной скорости транспортного средства), и работа устройства рулевого управления также автоматически управляется в соответствии со скоростью транспортного средства. Таким образом, во время помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, операция руления и операция нажатия педали акселератора/тормоза автоматически выполняются. Кроме того, устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения также является применимым к парковке вручную, при которой водитель выполняет операцию с акселератором, тормозом и механизмом рулевого управления.
Помимо этого, также можно выполнять процесс парковки посредством дистанционного управления, которое включает в себя передачу команды задания для целевого места Mo для парковки, команды начала процесса парковки, команды приостановки/отмены парковки и т.д. в рассматриваемое транспортное средство V без водителя от внешнего оператора.
[0070] Следует понимать, что водитель также может нажимать педаль акселератора/тормоза, и только работа устройства рулевого управления автоматически управляется. В этом случае, устройство 100 помощи при парковке управляет приводной системой 40 на основе заданной скорости транспортного средства, которая предварительно вычисляется таким образом, что рассматриваемое транспортное средство V придерживается намеченного пути для перемещения, и управляет устройством рулевого управления рассматриваемого транспортного средства V на основе заданного угла поворота при рулении, который также предварительно вычисляется.
[0071] Таким образом, устройство 100 помощи при парковке имеет автоматизированный режим движения, который не требует операции водителя, и режим операции вручную, который требует операции водителя. Автоматизированный режим движения включает в себя бортовой рабочий режим, в котором водитель находится на борту и управляет рассматриваемым транспортным средством V, и дистанционный рабочий режим, в котором оператор (водитель) удаленно управляет рассматриваемым транспортным средством V извне рассматриваемого транспортного средства V.
[0072] Ниже описывается способ представления информации помощи при парковке в устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. В одном или более вариантов осуществления настоящего изобретения, информация помощи при парковке представляется с использованием устройства 20 вывода, которое включает в себя дисплей 21.
[0073] Во-первых, описывается способ отображения информации помощи при парковке с использованием дисплея 21.
Фиг. 7 иллюстрирует пример способа отображения информации помощи при парковке.
В примерах отображения, проиллюстрированных на фиг. 7, снятое сверху изображение 21a (вид сверху) отображается в левой стороне экрана дисплея 21, изображение 21b для мониторинга (нормальный вид) отображается в правой стороне экрана дисплея 21, и сообщения 21c отображаются выше изображения 21b для мониторинга. Снятое сверху изображение 21a включает в себя изображение (граничные линии мест для парковки), которое указывает выбираемые места для парковки. Центр снятого сверху изображения 21a отображается со значком рассматриваемого транспортного средства V, указывающим позицию рассматриваемого транспортного средства V. Изображение 21b для мониторинга может отображаться с различными изображениями, захваченными посредством камер 1a-1d в соответствии с рабочим состоянием рассматриваемого транспортного средства V. Изображение 21b для мониторинга, проиллюстрированное на фиг. 7, отображается в качестве изображения, захваченного посредством камеры 1a, которая располагается на части решетки радиатора рассматриваемого транспортного средства V. Когда рассматриваемое транспортное средство V перемещается назад, изображение 21b для мониторинга может отображаться в качестве изображения, захваченного посредством камеры 1d, которая располагается около заднего бампера. В этом примере, снятое сверху изображение 21a и изображение 21b для мониторинга одновременно отображаются на дисплее 21, но только снятое сверху изображение 21a может отображаться на дисплее 21, или только изображение 21b для мониторинга может отображаться на дисплее 21.
[0074] Фиг. 7 иллюстрирует информацию помощи при парковке, отображаемую, когда выполняется поиск целевого места Mo для парковки. Рассматриваемое транспортное средство V перемещается вперед, и устройство 10 управления ожидает ввода информации выбора целевого места Mo для парковки. Фиг. 7 иллюстрирует окружение, в котором вышеописанное место PL4 для парковки, проиллюстрированное на фиг. 4B, обнаруживается в качестве рекомендованного места Mr для парковки.
[0075] Снятое сверху изображение 21a отображается с доступными местами Me для парковки и рекомендованным местом Mr для парковки. В окружении, в котором рассматриваемое транспортное средство V выполняет поиск доступного места Me для парковки при перемещении на автомобильной парковке, доступные места Me для парковки и рекомендованное место Mr для парковки изменяются по мере того, как рассматриваемое транспортное средство V перемещается. Устройство 100 помощи при парковке отображает доступные места Me для парковки и рекомендованное место Mr для парковки, которые последовательно обнаруживаются. Устройство 100 помощи при парковке отображает доступные места Me для парковки с метками доступности парковки в круглой форме и отображает рекомендованное место Mr для парковки с меткой рекомендации в прямоугольной форме.
[0076] Как проиллюстрировано на фиг. 7, когда рассматриваемое транспортное средство V перемещается, доступные места Me для парковки и рекомендованное место Mr для парковки последовательно изменяются по мере того, как рассматриваемое транспортное средство V перемещается. Когда доступное место Me для парковки или рекомендованное место Mr для парковки изменяется, устройство 100 помощи при парковке изменяет и отображает позицию доступного места для парковки или рекомендованного места для парковки. Когда скорость транспортного средства для рассматриваемого транспортного средства V является высокой, если доступное место Me для парковки или рекомендованное место Mr для парковки находится близко к рассматриваемому транспортному средству V, позиция отображения метки доступности парковки или метки рекомендации изменяется каждый раз, когда доступное место Me для парковки и рекомендованное место Mr для парковки изменяются. Если позиция отображения внезапно изменяется, время для выбора доступного места Me для парковки или рекомендованного места Mr для парковки может быть недостаточным.
[0077] Как описано выше, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения обнаруживает место для парковки из доступных мест для парковки, которое удовлетворяет условию парковки для извлечения места для парковки, которое должно рекомендоваться для водителя, в качестве рекомендованного места для парковки.
Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения отображает рекомендованное место для парковки в первой форме для отображения. Рекомендованное место для парковки представляет собой место для парковки из доступных мест для парковки, которое требует короткого времени для процесса парковки рассматриваемого транспортного средства V. Нельзя сказать, что место для парковки, которое требует длительного времени для процесса парковки (требует высоких связанных с парковкой затрат) является удобным для водителя, который использует устройство 100 помощи при парковке. Примеры такого места для парковки включают в себя место для парковки, которое находится далеко от текущей позиции, и место для парковки, которое требует определенного числа поворотов для парковки. С таких точек зрения, в одном или более вариантов осуществления настоящего изобретения, место для парковки, которое требует короткого времени для процесса парковки рассматриваемого транспортного средства V, извлекается в качестве рекомендованного места для парковки.
[0078] По мере того, как рассматриваемое транспортное средство V перемещается рекомендованное место для парковки, которое присутствует впереди рассматриваемого транспортного средства V, может перебазироваться (относительно) в мето позади рассматриваемого транспортного средства V. Другими словами, рекомендованное место для парковки изменяется (переходит) на другое место для парковки по мере того, как рассматриваемое транспортное средство V перемещается. Это также является истинным для доступных мест для парковки. В одном или более вариантов осуществления настоящего изобретения, первое место для парковки, которое должно отображаться, представляет собой место для парковки, которое удовлетворяет вышеописанному условию парковки, и примеры первого места для парковки включают в себя доступные места для парковки и рекомендованное место для парковки (здесь и в дальнейшем).
[0079] Предполагается, что место для парковки, которое присутствует впереди рассматриваемого транспортного средства V, обнаруживается в качестве первого места для парковки (примеры первого места для парковки включают в себя доступные места для парковки и рекомендованное место для парковки, здесь и в дальнейшем), и его позиция отображается. После этого, если первое место для парковки, обнаруженное перед перемещением, становится позади рассматриваемого транспортного средства V по мере того, как рассматриваемое транспортное средство V перемещается, первое место для парковки, обнаруженное до перемещения, больше не представляет собой место для парковки, которое является подходящим в качестве целевого места Mo для парковки. При парковке на первом месте для парковки, обнаруженном до перемещения, если первое место для парковки расположено позади, проезжаемое расстояние является большим, и число поворотов для парковки увеличивается. Следовательно, в этом случае, время, требуемое для процесса парковки посредством автоматизированного вождения, является большим и увеличивает связанные с парковкой затраты.
[0080] Аналогично, если, после того, как первое место для парковки обнаруживается, другое первое место для парковки (его примеры включают в себя доступные места для парковки и рекомендованное место для парковки, здесь и в дальнейшем) обнаруживается, первое место для парковки, которое ранее обнаружено, больше не представляет собой место для парковки, которое является подходящим в качестве целевого места для парковки. Очевидно, что время, требуемое для процесса парковки, меньше (связанные с парковкой затраты являются более низкими) при парковке на первом месте для парковки, обнаруженном при текущем условии (в текущей позиции), чем при парковке на первом месте для парковки, обнаруженном при предыдущем условии (в предыдущей позиции). Другими словами, когда автоматизированная парковка выполняется, парковка на первом месте для парковки, обнаруженном при текущем условии (в текущей позиции), является более удобной, чем парковка на первом месте для парковки, обнаруженном при предыдущем условии (в предыдущей позиции).
[0081] В дальнейшем в этом документе, подробно описываются устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения и способ помощи при парковке, используемый в нем. Этот способ помощи при парковке включает в себя процесс указания места для парковки (целевого места для парковки), на котором фактически паркуется рассматриваемое транспортное средство V. Один или более вариантов осуществления настоящего изобретения относятся к способу управления в случае, если место для парковки, отличное от места для парковки (его примеры включают в себя вышеописанные доступные места для парковки и рекомендованное место для парковки, здесь и в дальнейшем), обнаруженное посредством устройства 100 помощи при парковке, выбирается водителем.
[0082] Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения обнаруживает места для парковки с использованием изображений, захваченных посредством камер 1a-1d, и информации дальности из устройства 3 измерения дальности.
Тем не менее, в зависимости от позиций размещения камер 1a-1d, окружения захвата изображений, способа обработки, осуществляемого посредством устройства 2 обработки изображений, позиции размещения устройства 3 измерения дальности и размера и позиции трехмерного объекта, места для парковки могут не обнаруживаться в качестве доступных мест для парковки, даже если они фактически доступны.
В таких случаях, доступное место для парковки (его примеры включают в себя вышеописанные доступные места для парковки и рекомендованное место для парковки, здесь и в дальнейшем), которое устройство 100 помощи при парковке представляет водителю, не может указываться водителем, и другое место для парковки может указываться водителем. Это обусловлено тем, что водитель может подтверждать доступное место для парковки посредством собственного зрения/слуха водителя.
Водитель может выполнять ввод на основе выбора места для парковки, которое устройство 100 помощи при парковке представляет в качестве недоступного места для парковки (места для парковки, отличного от места для парковки, которое устройство 100 помощи при парковке представляет как доступное), в качестве целевого места для парковки.
Если обработка устройства 100 помощи при парковке ограничивается посредством своего результата обнаружения, обработка в соответствии с вводом на основе выбора водителем не может выполняться.
Таким образом, проблема состоит в том, что водитель может испытывать беспокойство касательно того, что даже если водитель выполняет ввод на основе выбора целевого места для парковки, определенного водителем, устройство 100 помощи при парковке не работает в соответствии с вводом на основе выбора водителя.
[0083] В одном или более вариантов осуществления настоящего изобретения, когда второе место для парковки, отличное от первого места для парковки, обнаруженного посредством устройства 100 помощи при парковке, выбирается водителем, процесс обнаружения для первого места для парковки выполняется снова. Например, в зависимости от окружения парковки и окружающей среды рассматриваемого транспортного средства, при парковке транспортного средства, условие парковки не может удовлетворяться даже на месте для парковки (его примеры включают в себя доступные места для парковки и рекомендованное место для парковки), которое является подходящим для парковки. Такой место для парковки может не обнаруживаться в качестве первого места для парковки (доступного места для парковки). Водитель может испытывать беспокойство касательно того, что даже если водитель может подтверждать место для парковки, подходящее для парковки, устройство 100 помощи при парковке не отображает место для парковки в качестве доступного места для парковки. Когда водитель выбирает второе место для парковки, отличное от первого места для парковки, устройство 10 управления определяет снова то, удовлетворяет или нет место для парковки условию парковки, и обнаруживает место для парковки, удовлетворяющее условию парковки, в качестве первого места для парковки. Посредством обнаружения мест для парковки снова, место для парковки, которое не может обнаруживаться в предыдущее время, может возможно обнаруживаться в качестве первого места для парковки. "Выполнение процесса обнаружения снова" упоминается как "повторное обнаружение" или его производные, здесь и в дальнейшем.
[0084] Хотя не ограничено конкретным образом, устройство 10 управления выполняет процесс повторного обнаружения для мест для парковки на втором месте для парковки, отличном от первого места для парковки, выбранного на основе результата предыдущего процесса обнаружения. Таким образом, выполняется определение в отношении того, удовлетворяет или нет второе место для парковки предварительно определенному условию парковки, и когда второе место для парковки удовлетворяет предварительно определенному условию парковки, второе место для парковки обнаруживается (указывается) в качестве первого места для парковки. Следует понимать, что места для парковки, которые должны подвергаться процессу повторного обнаружения, могут не быть ограничены.
[0085] Ниже описываются процессы управления, выполняемые в устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, со ссылкой на фиг. 8-13. Фиг. 8-11 являются блок-схемами последовательности операций способа, иллюстрирующими процессы управления, выполняемые в устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Блок-схемы последовательности операций способа фиг. 8-11 представляют процесс, когда целевое место для парковки вводится водителем на этапе 106, проиллюстрированном на фиг. 2. Здесь, место для парковки, которое должно подвергаться процессу, может представлять собой любое из доступных мест для парковки, обнаруженных на этапе 103 по фиг. 2, и рекомендованного места для парковки, обнаруженного на этапе 104 по фиг. 2. Работа и преимущества одного или более вариантов осуществления настоящего изобретения может получаться в любом случае, в котором место для парковки, которое должно подвергаться процессу, представляет собой "доступное место для парковки" или "рекомендованное место(а) для парковки".
[0086] Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей первый пример управления. На этапе S1, устройство 10 управления определяет то, представляет собой или нет целевое место для парковки, введенное водителем на этапе 106, проиллюстрированном на фиг. 2, место для парковки, представленное на этапе 105. Когда целевое место для парковки, введенное водителем, отличается от представленного места для парковки, процедура переходит к этапу S3. С другой стороны, когда целевое место для парковки, введенное водителем, является представленным местом для парковки, процедура переходит к этапу S2, и процесс этапа 107 по фиг. 2 и последующие процессы выполняются.
[0087] Когда второе место для парковки, отличное от первого места для парковки, выбирается водителем на этапе S1, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения управляет рассматриваемым транспортным средством V таким образом, что оно приближается ко второму месту для парковки (целевому месту Mo для парковки), которое вводится водителем. Устройство 10 управления направляет рассматриваемое транспортное средство V на второе место для парковки некоторое время в соответствии с инструкцией водителем. Устройство 10 управления передает позицию входного целевого места Mo для парковки в контроллер 30 транспортного средства. Контроллер 30 транспортного средства использует приводную систему 40 и датчик 50 угла поворота при рулении, чтобы перемещать рассматриваемое транспортное средство V таким образом, что оно приближается к целевому месту Mo для парковки. Перемещение рассматриваемого транспортного средства V может представлять собой перемещение посредством автоматизированного вождения, как описано выше, или перемещение посредством операции водителя.
[0088] Устройство 10 управления выполняет повторное обнаружение (процессы этапа S3 и следующих этапов) в то время, когда рассматриваемое транспортное средство V перемещается. По мере приближения к объекту, который должен быть обнаружен, могут получаться более точные захваченные изображения/данные дальности. Процесс повторного обнаружения этапа S3 и следующих этапов выполняется при перемещении на целевое место Mo для парковки, которое требуется водителю, и более точные результаты обнаружения для целевого места Mo для парковки ввиду этого могут получаться.
[0089] С идентичной точки зрения, когда второе место для парковки выбирается водителем, устройство 10 управления выполняет повторное обнаружение во временном интервале, в который рассматриваемое транспортное средство V приближается к выбранному второму месту для парковки. Временной интервал, в который рассматриваемое транспортное средство V приближается ко второму месту для парковки, может представлять собой временной интервал, в который расстояние между рассматриваемым транспортным средством V и вторым местом для парковки становится предварительно определенным значением или меньше, или временной интервал, в который предварительно определенное время прошло после временного интервала, в который второе место для парковки выбирается водителем. Процесс повторного обнаружения этапа S3 и следующих этапов выполняется после приближения к целевому месту Mo для парковки, которое требуется водителю, и более точные результаты обнаружения для целевого места Mo для парковки ввиду этого могут получаться.
[0090] Этот процесс предпочтительно выполняется после того, как рекомендованное место для парковки обнаруживается на этапе 104. Когда первое место для парковки из доступных мест для парковки, которое удовлетворяет условию парковки относительно рассматриваемого транспортного средства V, обнаруживается в качестве рекомендованного места для парковки, и после этого водитель выбирает второе место для парковки, отличное от первого места для парковки, устройство 10 управления повторно обнаруживает первое место для парковки (другое первое место для парковки). Очевидно, что точность результатов обнаружения является высокой на стадии, на которой рекомендованное место для парковки извлекается из доступных мест для парковки. Процесс повторного обнаружения выполняется на этой стадии, чтобы за счет этого не допускать ненадлежаще высокой частоты выполнения процесса повторного обнаружения, и может повышаться надежность устройства 100 помощи при парковке.
[0091] На этапе S3, устройство 10 управления снижает критерии условия парковки (ослабляет критерии) и выполняет повторное обнаружение. Устройство 10 управления определяет то, может или нет процесс повторного обнаружения со сниженными критериями обнаруживать входное целевое место для парковки в качестве места для парковки, на котором возможна парковка. Когда устройство 10 управления определяет то, что парковка возможна на входном целевом месте для парковки, процедура переходит к этапу S6, на котором входное целевое место для парковки задается в качестве цели парковки. После этапа 6 выполняется этап S2, и процесс этапа S107 по фиг. 2 и последующие процессы выполняются. После этапа S3, устройство 20 вывода может использоваться для того, чтобы представлять результаты процесса повторного обнаружения.
[0092] Когда, на этапе S3, устройство 10 управления не может обнаруживать входное целевое место для парковки в качестве места для парковки, на котором возможна парковка, процедура переходит к этапу S7. На этапе S7, водитель запрашивается на предмет того, чтобы повторно вводить целевое место для парковки. Устройство 20 вывода может использоваться для того, чтобы представлять запрос на повторный ввод.
[0093] В одном или более вариантов осуществления настоящего изобретения, когда водитель выбирает второе место для парковки, отличное от первого места для парковки, обнаруженного посредством устройства 100 помощи при парковке, процесс обнаружения для первого места для парковки выполняется снова. Это позволяет повышать вероятность парковки на месте для парковки, которое не обнаружено в качестве доступного места для парковки, несмотря на тот факт, что место для парковки фактически доступно.
[0094] Ниже описывается процесс повторного обнаружения этапа S3. Устройство 10 управления выполняет процесс повторного обнаружения для определенной области около второго места для парковки, которое выбирается водителем. Цель процесса повторного обнаружения состоит в том, чтобы повторно обнаруживать то, возможна или нет парковка на втором месте для парковки, которое не может обнаруживаться однократно в качестве места для парковки, на котором возможна парковка. Процесс обнаружения выполняется для области около второго места для парковки, и процесс повторного обнаружения ввиду этого может эффективно выполняться.
[0095] В процессе повторного обнаружения первого места для парковки (его примеры включают в себя доступные места для парковки и рекомендованное место для парковки, здесь и в дальнейшем), устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения изменяет вышеописанное условие парковки таким образом, что первое место для парковки может легко обнаруживаться.
В процессе повторного обнаружения первого места для парковки (доступного места для парковки, рекомендованного места для парковки), устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения изменяет, по меньшей мере, часть условия парковки таким образом, что первое место для парковки может легко обнаруживаться. Устройство 10 управления повторно обнаруживает место для парковки при другом условии парковки относительно второго места для парковки, которое не может обнаруживаться в предыдущее время, в качестве места для парковки, на котором возможна парковка.
В первом процессе изменения условия парковки, устройство 10 управления уменьшает вышеописанные пункты "условия парковки". Посредством уменьшения числа пунктов, заданных в качестве условия парковки, первое место для парковки может легко обнаруживаться, и ввиду этого можно обнаруживать первое место для парковки, которое не может обнаруживаться в первом процессе обнаружения.
[0096] Во втором процессе изменения условия парковки, предыдущий результат обнаружения игнорируется относительно определенного условия парковки. Когда, в предыдущем процессе обнаружения для первого места для парковки, устройство 10 управления определяет то, что второе место для парковки, выбранное водителем, уже использовано для парковки, или помеха присутствует на втором месте для парковки, устройство 10 управления определяет, в процессе повторного обнаружения, то, что второе место для парковки является незанятым, либо помехи не присутствуют на втором месте для парковки. Другими словами, при допущении относительно того факта, что водитель выбирает второе место для парковки после визуального подтверждения того, что второе место для парковки доступно, "результат обнаружения как уже использования для парковки" и "результат обнаружения того, что помеха присутствует" трактуются как игнорируемые.
[0097] Результаты обнаружения трехмерных объектов, включающих в себя другие транспортные средства и помехи, зачастую затрагиваются посредством окружающей ситуации для захвата изображений. В местоположении под сильным солнечным светом, может выполняться определение в отношении того, что трехмерный объект присутствует, на основе границы между светом и тенью. В местоположении с лужей после дождя, может выполняться определение в отношении того, что трехмерный объект присутствует, на основе отраженного света от водной поверхности. В местоположении с освещением, может выполняться определение в отношении того, что трехмерный объект присутствует, на основе освещения ночью. Таким образом, предусмотрено множество режимов возмущений для определения трехмерного объекта на основе захваченных изображений, которые может быть затруднительным преодолевать. Предпочтительно предоставлять значимость присутствию места для парковки без помех/незанятого места для парковки, которое визуально подтверждает сам водитель.
[0098] В одном или более вариантов осуществления настоящего изобретения, "результат обнаружения как уже использования для парковки" и "результат обнаружения того, что помеха присутствует" отбрасываются относительно целевого места для парковки от водителя. Повторное обнаружение в отношении того, является или нет место для парковки незанятым/присутствует или нет помеха, может выполняться для второго места для парковки, которое не может обнаруживаться в качестве места для парковки, на котором возможна парковка, вследствие эффекта возмущений в окружении захвата изображений.
[0099] В третьем процессе изменения условия парковки, устройство 10 управления изменяет вышеописанное "пороговое значение" "условия парковки" таким образом, что первое место для парковки может легко обнаруживаться. Ниже поясняются конкретные примеры.
1. Относительно обнаружения линий парковочных рамок
Пороговое значение изменяется, как пояснено ниже, чтобы за счет этого обеспечивать возможность простого обнаружения линий парковочных рамок.
(1) Пороговое значение яркостной разности краев уменьшается.
(2) Диапазон порогового значения угла линии расширяется.
(3) Диапазон порогового значения ширины линии расширяется.
(4) Пороговое значение длины непрерывного края (линии) уменьшается.
(5) Пороговое значение яркостной разности шума между линиями уменьшается.
(6) Пороговое значение вероятности, представляющей вероятность в качестве линий парковочных рамок, вычисленных на основе значений количественной оценки/оценки вышеуказанных (1)-(5), уменьшается.
2. Относительно обнаружения мест для парковки
Пороговое значение изменяется, как пояснено ниже, чтобы за счет этого обеспечивать возможность простого определения места для парковки.
(1) Пороговое значение длины линии, которая должна исключаться из возможных вариантов линий парковочных рамок, увеличивается.
(2) Пороговое значение (верхний предел/нижний предел) длины линии в качестве возможного варианта линии парковочной рамки изменяется.
3. Относительно определения того, возможна или нет парковка
Пороговое значение изменяется, как пояснено ниже, чтобы за счет этого предоставлять возможность простого определения того, что парковка возможна.
(1) Область, которая должна определяться, расширяется.
(2) Пороговое значение для определения того, что место для парковки является незанятым, уменьшается (определение незанятого места упрощается).
(3) Пороговое значение для определения того, что помеха присутствует, уменьшается (определение отсутствия помех упрощается).
[0100] 4. Относительно критериев для рекомендации парковки
Пороговое значение изменяется, как пояснено ниже, чтобы за счет этого предоставлять возможность простой рекомендации.
(1) Пороговое значение числа поворотов для парковки уменьшается.
(2) Пороговое значение времени, требуемого для парковки, уменьшается.
(3) Пороговое значение проезжаемого расстояния, требуемого для парковки, уменьшается.
Таким образом, пороговое значение условия парковки для обнаружения первого места для парковки (доступного места для парковки, рекомендованного места для парковки) регулируется. Через эту операцию, относительно второго места для парковки, которое не может обнаруживаться в качестве места для парковки, на котором возможна парковка, вследствие эффекта возмущений в окружении захвата изображений, эффекта позиции, размера и т.д. помехи, эффекта диапазона захвата изображений и т.п., повторное обнаружение может выполняться в отношении того, доступно или нет место для парковки.
[0101] Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей второй пример управления. Процессы этапов S1, S2, S3, S6 и S7 являются общими с процессами первого примера управления, описанного со ссылкой на фиг. 8, и вышеприведенное описание заимствуется в данном документе.
Когда устройство 10 управления определяет то, что целевое место для парковки, вводимое водителем на этапе 106, проиллюстрированном на фиг. 2, отличается от представленного места для парковки, процедура переходит к этапу S3. На этапе S3, устройство 10 управления снижает критерии условия парковки (ослабляет критерии) и определяет то, может или нет место для парковки обнаруживаться, на основе условия парковки со сниженными критериями. Когда место для парковки может обнаруживаться в повторном обнаружении, процедура переходит к этапу S4, на котором отображаются результаты повторного обнаружения. Форма для отображения не ограничена. Альтернативно, процедура может переходить к этапу S5 без такого отображения.
[0102] На этапе S5, устройство 10 управления определяет то, продолжается или нет операция включения устройства 5 ввода. Устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения задает второе место для парковки в качестве целевого места Mo для парковки. Когда выполняется определение в отношении того, что ввод информации выбора второго места для парковки непрерывно выполняется через устройство 5 ввода, устройство 10 управления помогает в парковке на целевом месте Mo для парковки. То, продолжается или нет нажатие устройства 5 ввода, может определяться посредством непрерывности сигнала выбора, который вводится с использованием устройства 5 ввода. Хотя не ограничено конкретным образом, в одном или более вариантов осуществления настоящего изобретения, переключатель 51 автоблокировки используется в качестве устройства 5 ввода.
[0103] Только тогда, когда переключатель 51 автоблокировки находится во включенном рабочем состоянии, устройство 10 управления задает место для парковки, ассоциированное с вводом на основе выбора водителем, в качестве целевого места Mo для парковки и помогает в парковке на целевом месте Mo для парковки. Таким образом, только когда водитель продолжает операцию ввода на основе выбора, процесс помощи при парковке для парковки рассматриваемого транспортного средства V на целевом месте Mo для парковки, которое представляет собой выбранный объект, непрерывно выполняется, и процесс помощи при парковке ввиду этого может выполняться в соответствии с намерением водителя.
[0104] В одном или более вариантов осуществления настоящего изобретения, относительно места для парковки, которое не может обнаруживаться, определению водителем на основе визуального подтверждения придается значимость, и когда водитель вводит информацию выбора второго места для парковки, второе место для парковки задается в качестве целевого места Mo для парковки. Кроме того, в то время как информация выбора второго места для парковки непрерывно вводится через устройство 5 ввода, устройство 10 управления оценивает то, что водитель подтверждает, что парковка возможна на втором месте для парковки, и продолжает процесс помощи при парковке для парковки рассматриваемого транспортного средства V на целевом месте Mo для парковки. Через эту операцию, даже когда результат обнаружения не является точным, результат обнаружения может корректироваться на основе входной информации, чтобы выполнять соответствующую помощь при парковке.
[0105] Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей третий пример управления. Этот пример управления является примером, когда водитель за пределами транспортного средства управляет устройством 100 помощи при парковке рассматриваемого транспортного средства V с использованием портативного устройства 5 ввода. Процессы этапов S1, S2, S3, S4, S6 и S7 являются общими с процессами первого и второго примеров управления, описанных со ссылкой на фиг. 8 и 9, и вышеприведенное описание заимствуется в данном документе.
Устройство 10 управления снижает критерии условия парковки (ослабляет критерии), чтобы определять то, может или нет место для парковки обнаруживаться, на основе условия парковки со сниженными критериями (этап S3) и отображает результаты повторного обнаружения (этап S4).
[0106] На этапе S51, устройство 10 управления определяет то, присутствует либо нет водитель (или пассажир) внутри транспортного средства или за пределами транспортного средства. Когда водитель или пассажир присутствует в транспортном средстве, процедура переходит к этапу S5. Этот процесс является общим для этапа S5 по фиг. 9. Помимо этого, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения получает входную информацию из устройства 5 ввода, которое может носиться за пределами транспортного средства. Устройство 10 управления может использовать информацию, принимаемую из портативного устройства 5 ввода, чтобы определять то, продолжается или нет операция включения устройства 5 ввода.
[0107] Когда информация выбора второго места для парковки вводится через портативное устройство 5 ввода, устройство 10 управления задает второе место для парковки в качестве целевого места Mo для парковки. Кроме того, в то время как информация выбора второго места для парковки непрерывно вводится через портативное устройство 5 ввода, устройство 10 управления оценивает то, что водитель подтверждает, что второе место для парковки доступно, и продолжает процесс помощи при парковке для парковки рассматриваемого транспортного средства V на целевом месте Mo для парковки. Через эту операцию, даже когда результат обнаружения не является точным, результат обнаружения может корректироваться на основе информации, которая вводится через портативное устройство 5 ввода, чтобы выполнять соответствующую помощь при парковке.
[0108] Четвертый пример управления начинается с процесса повторного обнаружения этапа S3, проиллюстрированного на фиг. 8-10. На этапе S12 по фиг. 11, устройство 10 управления выполняет процесс повторного обнаружения, когда целевое место для парковки, вводимое водителем на этапе 106, проиллюстрированном на фиг. 2, отличается от представленного места для парковки. Этот процесс повторного обнаружения может выполняться при перемещении к целевому месту Mo для парковки, указываемому водителем, или также может выполняться после приближения в пределах предварительно определенного расстояния от целевого места Mo для парковки.
[0109] На этапе S13, устройство 10 управления определяет то, возможна или нет парковка на целевом месте Mo для парковки, указываемом водителем. Устройство 10 управления повторно обнаруживает присутствие другого припаркованного транспортного средства и присутствие помехи относительно целевого места Mo для парковки, указываемого водителем. Когда парковка возможна на целевом месте Mo для парковки, устройство 10 управления вычисляет намеченный путь на этапе S14. Дополнительно, на этапе S15, устройство 10 управления определяет то, может или нет рассматриваемое транспортное средство V придерживаться вычисленного намеченного пути для перемещения, т.е. то, присутствует либо нет помеха на намеченном пути. Когда парковка возможна на целевом месте Mo для парковки, указываемом водителем ("Да" на S13), и рассматриваемое транспортное средство V может перемещаться вдоль намеченного пути ("Да" на S15), процедура переходит к этапу S16, и процесс S107, проиллюстрированного на фиг. 2, и последующие процессы выполняются.
[0110] Когда на этапе S13 выполняется определение в отношении того, что помеха присутствует в целевом месте Mo для парковки, указываемом водителем, и парковка невозможна, либо когда на этапе S15 помеха присутствует на вычисленном намеченном пути, и перемещение является невозможным, процедура переходит к этапу S17.
Эта ситуация представляет окружение, в котором устройство 100 помощи при парковке определяет то, что выполнение процесса парковки является затруднительным, когда рассматриваемое транспортное средство V фактически приближается к целевому месту Mo для парковки, либо когда рассматриваемое транспортное средство V пытается парковаться на целевом месте Mo для парковки. Первый пример этого типа окружения является случаем, в котором помеха не может обнаруживаться, поскольку помеха скрывается вследствие относительно большого расстояния между рассматриваемым транспортным средством V и целевым местом Mo для парковки, но когда рассматриваемое транспортное средство V приближается к целевому месту Mo для парковки, скрытая помеха обнаруживается в/около целевого места Mo для парковки. Второй пример является случаем, в котором когда рассматриваемое транспортное средство V находится далеко от целевого места Mo для парковки, выполняется определение в отношении того, что управление парковкой может выполняться (управление парковкой должно выполняться), но когда рассматриваемое транспортное средство V должно фактически приближаться к целевому месту Mo для парковки, либо когда управление парковкой на целевом месте Mo для парковки начинается, выполняется определение в отношении того, что парковка невозможна на целевом месте Mo для парковки.
В частности, теперь предполагается, что когда место PL8 для парковки, проиллюстрированное на фиг. 4A, выбирается в качестве целевого места для парковки, выполнение управления парковкой определяется, поскольку место PL8 для парковки является незанятым. После этого, когда рассматриваемое транспортное средство V приближается к месту для парковки PL8, либо когда управление парковкой на месте PL8 для парковки начинается, может выполняться определение в отношении того, что намеченный путь для парковки не может извлекаться вследствие присутствия стены W.
[0111] Тем не менее, к счастью, даже в ситуации, которая обусловливает отказ от парковки рассматриваемого транспортного средства V на целевом месте Mo для парковки, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения может не допускать отказа от выполнения процесса помощи при парковке. Другими словами, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения продолжает процесс помощи при парковке для рассматриваемого транспортного средства V до тех пор, пока рассматриваемое транспортное средство V не въезжает на одно из мест для парковки.
В частности, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения выполняет процесс в соответствии с ситуацией, к примеру, в соответствии с тем, находится процесс помощи при парковке в режиме парковки вручную, в режиме автоматизированной парковки, в режиме дистанционной парковки, в режиме бортовой парковки и т.п. Ниже описывается процесс.
[0112] На этапе S17, устройство 10 управления выполняет запрос к водителю в отношении того, следует или нет переключаться на "режим парковки вручную". Таким образом, устройство 10 управления подтверждает то, пробует или нет водитель парковку вручную. Часть (A) по фиг. 12(A) иллюстрирует пример отображения сообщения для подтверждения. Сообщение для подтверждения может отображаться на дисплее устройства 5 ввода.
[0113] "Режим парковки вручную" в одном или более вариантов осуществления настоящего изобретения означает режим, в котором водитель рассматриваемого транспортного средства V выполняет любое одно или более из операции руления и операции нажатия педали тормоза/акселератора. Примеры "режима парковки вручную" также включают в себя режим полуавтоматической парковки, в котором устройство 100 помощи при парковке выполняет часть операции.
"Режим автоматизированной парковки" означает режим, в котором водитель рассматриваемого транспортного средства V не выполняет ни одно из операции руления и операции нажатия педали тормоза/акселератора, и устройство 100 помощи при парковке (включающее в себя ассоциированные бортовые устройства) рассматриваемого транспортного средства V выполняет весь процесс парковки.
"Режим автоматизированной парковки" может использоваться как когда водитель находится на борту рассматриваемого транспортного средства V, так и когда водитель не находится на борту рассматриваемого транспортного средства V. В "режиме дистанционной парковки", когда водитель не находится на борту рассматриваемого транспортного средства V, вышеописанное портативное устройство 5 ввода может использоваться для того, чтобы вводить команды в устройство 100 помощи при парковке рассматриваемого транспортного средства V, чтобы за счет этого дистанционно управлять операцией парковки рассматриваемого транспортного средства V.
[0114] Когда "режим парковки вручную" выбирается на этапе S17, процедура переходит к этапу S18. На этапе S18, устройство 10 управления определяет то, находится или нет рассматриваемое транспортное средство V в "режиме дистанционной парковки". То, находится или нет рассматриваемое транспортное средство V в режиме дистанционной парковки, может определяться на основе информации выбора режима, которая предварительно вводится, или также может определяться на основе местоположения устройства 5 ввода. Устройство 100 помощи при парковке продолжает связь с устройством 5 ввода в предварительно определенный период. Устройство 10 управления может определять то, что устройство 5 ввода присутствует за пределами рассматриваемого транспортного средства V, на основе того, возможна или нет связь с устройством 5 ввода.
[0115] Когда, на этапе S18, выполняется определение в отношении того, что рассматриваемое транспортное средство V не находится в режиме дистанционной парковки, считается, что водитель находится на борту рассматриваемого транспортного средства V. В этом случае, процедура переходит к этапу S21. Устройство 10 управления оставляет выполнение процесса парковки на усмотрение водителя в этом местоположении. Часть (B) по фиг. 12 иллюстрирует пример отображения сообщения переключения на парковку вручную.
[0116] Когда, на этапе S18, выполняется определение в отношении того, что рассматриваемое транспортное средство V находится в режиме дистанционной парковки, считается, что водитель не находится на борту рассматриваемого транспортного средства V. В этом случае, процедура переходит к этапу S19.
[0117] При условии, что рассматриваемое транспортное средство V находится в режиме дистанционной парковки, в котором устройство 5 ввода расположено за пределами рассматриваемого транспортного средства V, когда выполняется определение в отношении того, что первое место для парковки не удовлетворяет условию парковки, устройство управления согласно одному или более вариантов осуществления настоящего изобретения выполняет процесс перемещения рассматриваемого транспортного средства V в позицию переключения, которая определяется на основе позиции устройства 5 ввода.
[0118] На этапе S19, устройство 10 управления вычисляет позицию переключения, в которой рассматриваемое транспортное средство V переключается на режим парковки вручную. Позиция переключения представляет собой позицию, которая является подходящей для оставления управляющей инициативы процесса помощи при парковке для рассматриваемого транспортного средства V на усмотрение водителя. В позиции переключения, устройство 10 управления переключает режим парковки устройства 100 помощи при парковке на режим парковки вручную. Таким образом, устройство 10 управления продолжает управление процессом помощи при парковке до тех пор, пока рассматриваемое транспортное средство V не прибывает в позицию переключения.
[0119] Устройство 10 управления вычисляет "позицию переключения" со следующих точек зрения.
(1) Позиция переключения должна находиться в местоположении, в котором водитель может легко садиться.
(2) Позиция переключения должна находиться в местоположении, которое не создает помехи перемещению других транспортных средств и пешеходов.
(3) Позиция переключения должна находиться в местоположении, которое обеспечивает возможность простого выполнения процесса парковки в режиме парковки вручную.
[0120] Ниже описываются вышеприведенные пункты (1)-(3).
"Местоположение, в котором которого водитель может легко садиться", получается со следующих точек зрения.
(a) Расстояние от текущей позиции водителя должно быть небольшим. Текущая позиция водителя определяется на основе позиции устройства 5 ввода, носимого водителем.
(b) Дверь может открываться и закрываться. Определение выполняется с учетом пространства, в котором может открываться дверь на стороне водительского сиденья.
"Местоположение, которое не создает помехи перемещению других транспортных средств и пешеходов", получается со следующих точек зрения.
(a) Другие транспортные средства и пешеходы не присутствуют.
(b) Местоположение не должно создавать помехи проезду/прохождению других транспортных средств и пешеходов.
"Местоположение, которое обеспечивает возможность простого выполнения процесса парковки в режиме парковки вручную", получается со следующих точек зрения.
(a) Местоположение должно находиться близко к месту для парковки с достаточным допустимым запасом.
(b) Смежное место или места для парковки являются незанятыми.
(c) Область для операции около места для парковки (область, в которой транспортное средство может двигаться для парковки) является широкой.
Устройство 10 управления может вычислять местоположение, которое удовлетворяет всем вышеприведенным пунктам (1)-(3), в качестве позиции переключения либо также может вычислять местоположение, которое удовлетворяет одному или более из (1)-(3), в качестве позиции переключения.
Хотя не ограничено конкретным образом, ниже описывается пример вычисления позиции переключения. Устройство 10 управления вычисляет намеченный путь от позиции рассматриваемого транспортного средства V, когда выполняется определение в отношении того, что парковка на целевом месте Mo для парковки является невозможной, до позиции устройства 5 ввода, носимого водителем. На этом намеченном пути, устройство 10 управления обнаруживает зоны, в которых не присутствуют другие транспортные средства и пешеходы и/или которые не создают помехи проезду/прохождению других транспортных средств и пешеходов. Устройство 10 управления извлекает зоны, имеющие размер, который обеспечивает возможность рассматриваемому транспортному средству V останавливаться и обеспечивает возможность открытия двери на стороне водительского сиденья. Устройство 10 управления задает приоритеты для этих зон в порядке их близости к устройству 5 ввода (т.е. водителю). Устройство 10 управления предпочтительно извлекает широкое место для парковки или место для парковки с незанятыми соседними местами из числа зон, имеющих высокий приоритет. Позиция, соответствующая извлеченному месту для парковки, используется в качестве позиции переключения.
[0121] Устройство 10 управления передает позиционную информацию позиции переключения или карту, указывающую позицию для позиции переключения, в устройство 5 ввода. Часть (C) по фиг. 12 иллюстрирует пример отображения сообщения, передающего позицию переключения. Это сообщение отображается на дисплее устройства 5 ввода.
[0122] На этапе S20, после передачи вышеуказанного сообщения, передающего позицию переключения, устройство 10 управления перемещает рассматриваемое транспортное средство V в позицию переключения. Перемещение в позицию переключения может начинаться после приема сигнала подтверждения приема из устройства 5 ввода.
[0123] Снова ссылаясь на этап S17, когда "режим парковки вручную" не выбирается, процедура переходит к этапу S22. Процесс этапа 22 и последующие процессы представляют собой процессы, когда выбирается "режим автоматизированной парковки". Часть (A) по фиг. 13(A) иллюстрирует пример отображения сообщения для подтверждения. Сообщение для подтверждения может отображаться на дисплее устройства 5 ввода.
[0124] На этапе S22, устройство 10 управления определяет то, выбирает или нет водитель другое место для парковки. Другое место для парковки при использовании в данном документе означает место для парковки, отличное от целевого места Mo для парковки, которое определяется на этапе S13 в качестве объекта повторного обнаружения. Когда другое место для парковки выбирается, процедура переходит к этапу S28, на котором устройство 10 управления определяет то, представляет собой выбранное место для парковки или нет доступное место для парковки (или рекомендованное место для парковки). Когда выбранное место для парковки представляет собой доступное место для парковки или рекомендованное место для парковки, процедура переходит к этапу S29, на котором рассматриваемое транспортное средство V паркуется на месте для парковки. Когда выбранное место для парковки не представляет собой ни одно из доступного места для парковки или рекомендованного места для парковки, процедура возвращается к этапу S12, с которого повторно обнаруживается выбранное место для парковки.
[0125] Когда, на этапе S22, устройство 10 управления определяет то, что водитель не выбирает другое место для парковки, процедура переходит к этапу S23. Когда место для парковки не выбирается, считается, что водитель определяет не парковаться, и, следовательно, предпочтительно завершать процесс помощи при парковке.
[0126] Примеры окружения, в котором водитель не выбирает другое место для парковки, включают в себя окружение, в котором водитель хочет парковать рассматриваемое транспортное средство V на месте для парковки, которое находится дальше, чем места для парковки, которые может выбирать водитель (на месте для парковки, которое не отображается на экране выбора). В одном или более вариантов осуществления настоящего изобретения, предложен процесс обработки в таком окружении.
[0127] Когда, в результате повторного обнаружения, выполняется определение в отношении того, что второе место для парковки не удовлетворяет условию парковки ("Нет" на этапе S13, "Нет" на этапе S15), устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения представляет место для парковки, которое расположено дальше от рассматриваемого транспортного средства V, чем выбираемые места для парковки, в качестве места для парковки, которое может выбираться. Водитель может выбирать одно целевое место Mo для парковки из числа мест для парковки, представленных в качестве мест для парковки, которые могут выбираться. В результате повторного обнаружения, второе место для парковки (целевое место Mo для парковки), указываемое водителем, не может удовлетворять условию парковки. Если нет других выбираемых мест для парковки, процесс помощи при парковке может заходить в тупик. Также в ситуации, в которой, в результате повторного обнаружения, второе место для парковки (целевое место Mo для парковки), указываемое водителем, не удовлетворяет условию парковки, водитель может захотеть пройти пешком, с тем чтобы найти удаленное место для парковки.
[0128] Когда, в результате повторного обнаружения, второе место для парковки (целевое место Mo для парковки), указываемое водителем, не удовлетворяет условию парковки, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения расширяет область выбираемых мест для парковки к направлению движения рассматриваемого транспортного средства V. Как результат, опции мест для парковки увеличиваются по сравнению с текущим моментом. Это позволяет представлять новые опции (места для парковки, которые могут выбираться) водителю даже в окружении, в котором второе место для парковки (целевое место Mo для парковки), указываемое водителем, не удовлетворяет условию парковки, и место для парковки не может выбираться. Это обеспечивает возможность продолжения процесса помощи при парковке.
[0129] В одном или более вариантов осуществления настоящего изобретения, выполняется запрос в отношении того, хочет или нет водитель парковать рассматриваемое транспортное средство V на месте для парковки, которое находится дальше, чем места для парковки, которые может выбирать водитель (на месте для парковки, которое не отображается на экране выбора). Например, единственное незанятое место для парковки представляется в дополнение к целевому месту Mo для парковки, на котором парковка невозможна, но водитель может отказываться парковаться на нем и хотеть парковаться на еще более удаленном месте для парковки. В одном или более вариантов осуществления настоящего изобретения, как проиллюстрировано в части (B) по фиг. 13, другое место для парковки, на котором возможна парковка, представляется, и выполняется запрос в отношении того, следует или нет парковаться. Когда "Нет" вводится в ответ на запрос "Парковаться здесь?", устройство 10 управления расширяет область выбираемых мест для парковки впереди рассматриваемого транспортного средства V и представляет место для парковки, отличное от места для парковки, которое отображается в данный момент, в качестве места для парковки, которое может выбираться.
[0130] Таким образом, когда водитель хочет парковать рассматриваемое транспортное средство V на месте для парковки, которое не отображается на экране выбора (на месте для парковки, которое находится дальше, чем выбираемые места для парковки), устройство 10 управления расширяет выбираемый диапазон и представляет место для парковки, которое принадлежит расширенному новому выбираемому диапазону, в качестве места для парковки, которое может выбираться. На этапе S22, случай, в котором место для парковки не выбирается, может представляться посредством случая, в котором функциональный ввод от водителя не выполняется в течение предварительно определенного времени или больше.
[0131] На этапе S23, устройство 10 управления представляет места для парковки, отличные от мест для парковки, отображаемых на экране выбора, водителю. Устройство 10 управления выполняет процесс этапа S24 и следующих этапов, чтобы перемещаться на другое место для парковки, выбранное водителем.
[0132] После этапа S23 выполняется этап S24, на котором устройство 10 управления определяет то, находится или нет рассматриваемое транспортное средство V в "режиме дистанционной парковки". Процесс определения того, находится или нет рассматриваемое транспортное средство V в режиме дистанционной парковки, является общим с процессом этапа S18.
[0133] Когда, на этапе S24, выполняется определение в отношении того, что рассматриваемое транспортное средство V не находится в режиме дистанционной парковки, считается, что водитель находится на борту рассматриваемого транспортного средства V, так что процедура переходит к этапу S27.
[0134] Когда, на этапе S24, выполняется определение в отношении того, что рассматриваемое транспортное средство V находится в режиме дистанционной парковки, считается, что водитель не находится на борту рассматриваемого транспортного средства V. В этом случае, процедура переходит к этапу S25.
На этапе S25, устройство 10 управления вычисляет позицию переключения, в которой режим парковки переключается в режим парковки вручную. Позиция переключения представляет собой позицию, которая является подходящей для оставления управляющей инициативы процесса помощи при парковке для рассматриваемого транспортного средства V на усмотрение водителя. Позиция переключения может получаться с использованием процесса, описанного на этапе S19.
[0135] Устройство 10 управления передает позиционную информацию позиции переключения или карту, указывающую позицию для позиции переключения, в устройство 5 ввода. Часть (C) по фиг. 13 иллюстрирует пример отображения сообщения, передающего позицию переключения. Это сообщение отображается на дисплее устройства 5 ввода.
[0136] На этапе S26, после передачи вышеуказанного сообщения, которое передает позицию переключения, как проиллюстрировано в части (C) по фиг. 13, устройство 10 управления перемещает рассматриваемое транспортное средство V в позицию переключения. Перемещение в позицию переключения может начинаться после приема сигнала подтверждения приема из устройства 5 ввода.
[0137] Таким образом, согласно устройству 100 помощи при парковке в одном или более вариантов осуществления настоящего изобретения, даже в ситуации, которая обусловливает отказ от парковки рассматриваемого транспортного средства V на целевом месте Mo для парковки, можно не допускать отказа от непосредственно выполнения процесса помощи при парковке. Когда процесс помощи при парковке выполняется в режиме дистанционной парковки, позиция переключения, подходящая для переключения на режим парковки вручную, вычисляется на основе местоположения устройства 5 ввода, используемого для дистанционного управления, и управляющая инициатива процесса помощи при парковке для рассматриваемого транспортного средства V оставляется на усмотрение водителя в позиции переключения. Это позволяет увеличивать вероятность того, что устройство 100 помощи при парковке может завершать процесс помощи при парковке.
[0138] Способ помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения используется в устройстве помощи при парковке, как указано выше, и ввиду этого имеет следующие преимущества. Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения сконфигурировано и работает так, как указано выше, и ввиду этого имеет следующие преимущества.
[0139] (1) Согласно способу помощи при парковке в одном или более вариантов осуществления настоящего изобретения, обнаруживается первое место для парковки, которое удовлетворяет предварительно заданному условию парковки, и когда информация выбора второго места для парковки, отличного от первого места для парковки, вводится, повторное обнаружение места для парковки, которое удовлетворяет условию парковки, выполняется снова. Это позволяет узнать вероятность того, что рассматриваемое транспортное средство V может парковаться на месте для парковки, которое не обнаружено в качестве доступного места для парковки, несмотря на тот факт, что место для парковки фактически доступно.
[0140] (2) Согласно способу парковки в одном или более вариантов осуществления настоящего изобретения, в процессе повторного обнаружения первого места для парковки, выполняется определение в отношении того, удовлетворяет или нет второе место для парковки, для которого вводится информация выбора, условию парковки, и второе место для парковки, удовлетворяющее условию парковки, обнаруживается в качестве первого места для парковки. Это ограничивает область обнаружения для первого места для парковки и может уменьшать время обнаружения.
[0141] (3) Согласно способу в одном или более вариантов осуществления настоящего изобретения, в процессе повторного обнаружения первого места для парковки, часть условий, включенных в условие парковки, изменяется таким образом, что место для парковки легко обнаруживается. Таким образом, в процессе повторного обнаружения первого места для парковки (доступного места для парковки, рекомендованного места для парковки), устройство 10 управления устройства 100 помощи при парковке изменяет, по меньшей мере, часть условия парковки таким образом, что место для парковки легко обнаруживается. Относительно второго места для парковки, которое не может обнаруживаться однократно в качестве места для парковки, на котором возможна парковка, то, возможна или нет парковка, может быть подтверждено при другом условии парковки.
[0142] (4) Согласно способу в одном или более вариантов осуществления настоящего изобретения, в процессе повторного обнаружения первого места для парковки, пороговое значение условия парковки изменяется таким образом, что первое место для парковки легко обнаруживается. Таким образом, пороговое значение условия парковки для обнаружения первого места для парковки (доступного места для парковки, рекомендованного места для парковки) регулируется. Через эту операцию, относительно второго места для парковки, которое не может обнаруживаться в качестве места для парковки, на котором возможна парковка, вследствие эффекта возмущений в окружении захвата изображений, эффекта позиции, размера и т.д. помехи, эффекта диапазона захвата изображений и т.п., подтверждение может осуществляться в отношении того, доступно или нет место для парковки.
[0143] (5) Согласно способу в одном или более вариантов осуществления настоящего изобретения, при повторном обнаружении первого места для парковки, повторно обнаруживается определенная область около второго места для парковки, выбранного водителем. Устройство 10 управления выполняет процесс повторного обнаружения для определенной области около второго места для парковки. Процесс обнаружения выполняется для области около второго места для парковки, и процесс повторного обнаружения ввиду этого может эффективно выполняться.
[0144] (6) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда выполняется определение в отношении того, что второе место для парковки, выбранное водителем, уже использовано для парковки, или помеха присутствует на втором месте для парковки пр обнаружении первого места для парковки, выполняется определение в отношении того, что второе место для парковки является незанятым, либо помехи не присутствуют на втором месте для парковки, в процессе повторного обнаружения. В одном или более вариантов осуществления настоящего изобретения, "результат обнаружения как уже использования для парковки" и "результат обнаружения того, что помеха присутствует" отбрасываются относительно целевого места для парковки от водителя. Это обеспечивает возможность выполнения подтверждения в отношении того, является или нет место для парковки незанятым, для второго места для парковки, которое не может обнаруживаться в качестве места для парковки, на котором возможна парковка, вследствие эффекта возмущений в окружении захвата изображений.
[0145] (7) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда второе место для парковки выбирается водителем, повторное обнаружение выполняется в то время, когда рассматриваемое транспортное средство перемещается. Процесс повторного обнаружения выполняется при перемещении на целевое место Mo для парковки, которое требуется водителю, и более точные результаты обнаружения для целевого места Mo для парковки ввиду этого могут получаться.
[0146] (8) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда второе место для парковки выбирается водителем, устройство 10 управления выполняет повторное обнаружение в то время, когда рассматриваемое транспортное средство V приближается к выбранному второму месту для парковки. Процесс повторного обнаружения выполняется после приближения к целевому месту Mo для парковки, которое требуется водителю, и более точные результаты обнаружения для целевого места Mo для парковки ввиду этого могут получаться.
[0147] (9) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда первое место для парковки из доступных мест для парковки, которое удовлетворяет условию парковки относительно рассматриваемого транспортного средства V, обнаруживается в качестве рекомендованного места для парковки, и после этого водитель выбирает второе место для парковки, отличное от первого места для парковки, устройство 10 управления повторно обнаруживает первое место для парковки (другое первое место для парковки). Очевидно, что точность результатов обнаружения является высокой на стадии, на которой рекомендованное место для парковки извлекается из доступных мест для парковки. Процесс повторного обнаружения выполняется на этой стадии, чтобы за счет этого не допускать ненадлежаще высокой частоты выполнения процесса повторного обнаружения. Таким образом, частота выполнения процесса повторного обнаружения может подавляться, чтобы за счет этого повышать надежность устройства 100 помощи при парковке. Кроме того, константа обработки может уменьшаться, поскольку процесс повторного обнаружения выполняется только для соответствующих окружений.
[0148] (10) Согласно способу в одном или более вариантов осуществления настоящего изобретения, дополнительно предоставляется устройство 5 ввода, выполненное с возможностью обмена сигналом с устройством 100 помощи при парковке. Когда выполняется определение в отношении того, что ввод информации выбора второго места для парковки непрерывно выполняется через устройство 5 ввода, второе место для парковки задается в качестве целевого места для парковки, и выполняется помощь при парковке на целевом месте для парковки. Только тогда, когда переключатель 51 автоблокировки находится во включенном рабочем состоянии, устройство 10 управления задает место для парковки, ассоциированное с вводом на основе выбора водителем, в качестве целевого места Mo для парковки и помогает в парковке на целевом месте Mo для парковки. Таким образом, только когда водитель продолжает операцию ввода на основе выбора, процесс помощи при парковке для парковки рассматриваемого транспортного средства V на целевом месте Mo для парковки, которое представляет собой выбранный объект, непрерывно выполняется, и процесс помощи при парковке ввиду этого может выполняться в соответствии с намерением водителя.
[0149] (11) Согласно способу в одном или более вариантов осуществления настоящего изобретения, дополнительно предоставляется устройство 5 ввода, выполненное с возможностью обмена сигналом с устройством 100 помощи при парковке, и используется устройство 100 помощи при парковке. Устройство 100 помощи при парковке включает в себя устройство 5 ввода, которое является портативным и выполнено с возможностью обмена информацией с устройством 10 управления. Процесс помощи при парковке для рассматриваемого транспортного средства V ввиду этого может дистанционно управляться.
[0150] (12) В одном или более вариантов осуществления настоящего изобретения, дополнительно предоставляется устройство 5 ввода, выполненное с возможностью обмена информацией с устройством 100 помощи при парковке, и предложен способ помощи при парковке, когда устройство 5 ввода расположено за пределами рассматриваемого транспортного средства V (т.е. когда выполняется дистанционное управление). Когда, в результате повторного обнаружения второго места для парковки, выполняется определение в отношении того, что второе место для парковки не удовлетворяет условию парковки, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения перемещает рассматриваемое транспортное средство V в позицию переключения, которая определяется на основе местоположения устройства 5 ввода. Когда процесс помощи при парковке выполняется в режиме дистанционной парковки, позиция переключения, подходящая для того, чтобы переключаться на режим парковки вручную, вычисляется на основе местоположения устройства 5 ввода, используемого для дистанционного управления, и управляющая инициатива процесса помощи при парковке для рассматриваемого транспортного средства V оставляется на усмотрение водителя в позиции переключения. Это позволяет увеличивать вероятность того, что устройство 100 помощи при парковке может завершать процесс помощи при парковке.
[0151] (13) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда, в результате повторного обнаружения, выполняется определение в отношении того, что второе место для парковки не удовлетворяет условию парковки, выполняется запрос водителю или пассажиру в отношении того, следует или нет парковаться вручную на втором месте для парковки. Это позволяет стимулировать водителя или пассажира, с тем чтобы пробовать парковку вручную, даже когда для устройства 100 помощи при парковке затруднительно завершать парковку на втором месте для парковки. Ввиду этого может увеличиваться вероятность парковки на втором месте для парковки.
[0152] (14) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда, в результате повторного обнаружения, выполняется определение в отношении того, что второе место для парковки не удовлетворяет условию парковки, место для парковки, которое расположено дальше, чем выбираемые места для парковки со ссылкой на рассматриваемое транспортное средство V, представляется в качестве места для парковки, которое может выбираться. Это позволяет представлять новые опции (места для парковки, которые могут выбираться) водителю даже в окружении, в котором, в результате повторного обнаружения, второе место для парковки (целевое место Mo для парковки), указываемое водителем, не удовлетворяет условию парковки, и место для парковки не может выбираться. Это обеспечивает возможность продолжения процесса помощи при парковке.
[0153] (15) Вышеописанный способ помощи при парковке/способ отображения информации помощи при парковке может осуществляться с использованием устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения ввиду этого имеет вышеописанную работу и преимущества.
[0154] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0155] Таким образом, в настоящем описании, пример устройства 100 помощи при парковке, имеющего устройство 10 управления, дисплей 21 и устройство 5 ввода, описывается как вариант осуществления устройства помощи при парковке согласно настоящему изобретению, но настоящее изобретение не ограничено этим.
Описание позиционных обозначений
[0156] 1000 - система помощи при парковке
100 - устройство помощи при парковке
10 - устройство управления
11 - CPU
12 - ROM
13 - RAM
20 - устройство вывода
21 - дисплей
1a-1d - бортовые камеры
2 - устройство обработки изображений
3 - устройство измерения дальности
5 - устройство ввода
30 - контроллер транспортного средства
40 - приводная система
50 - датчик угла поворота при рулении
60 - датчик скорости транспортного средства
V - рассматриваемое транспортное средство
Me - доступное место для парковки, метка доступности парковки
Mr - рекомендованное место для парковки, метка рекомендации
Mo - целевое место для парковки.
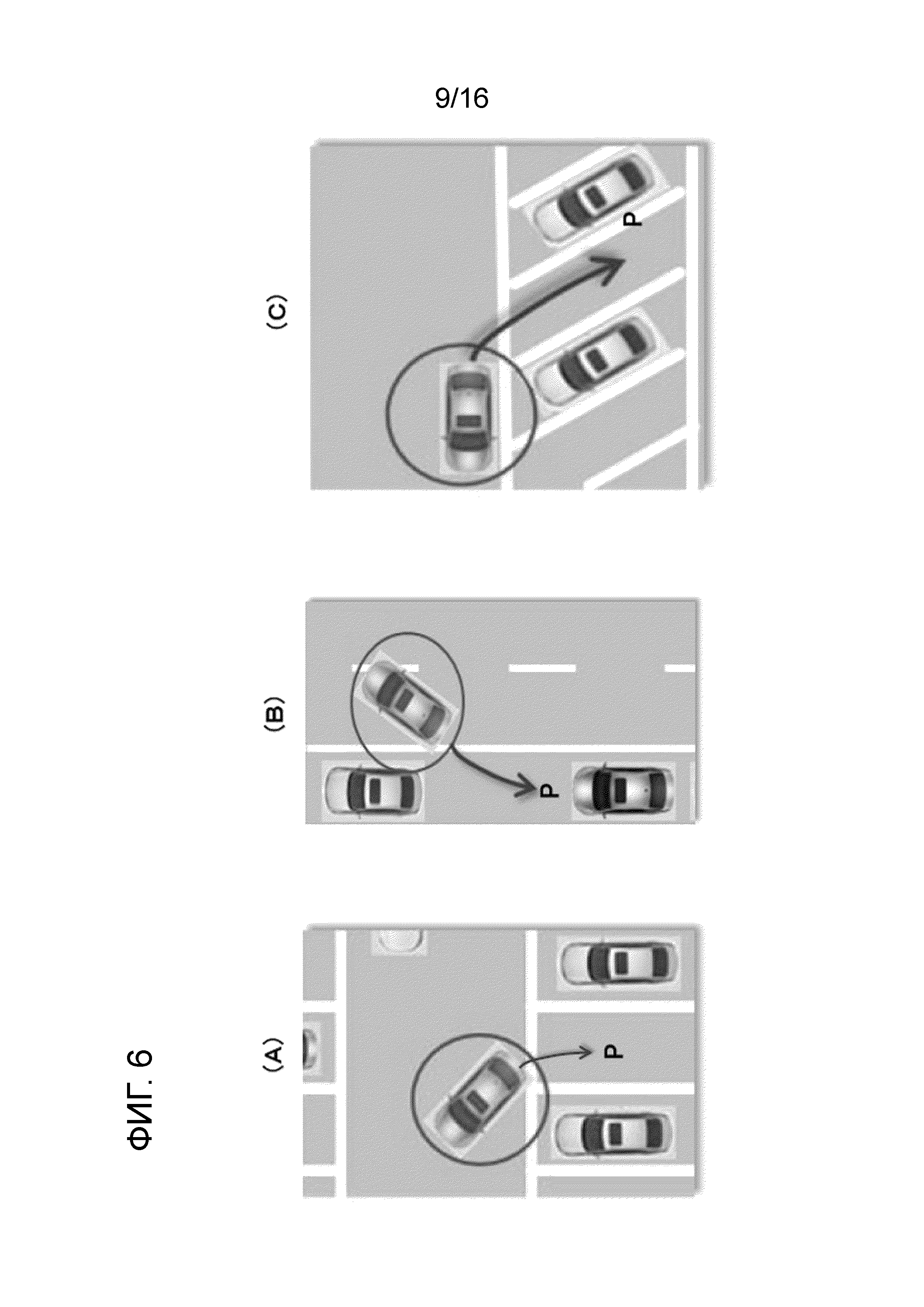
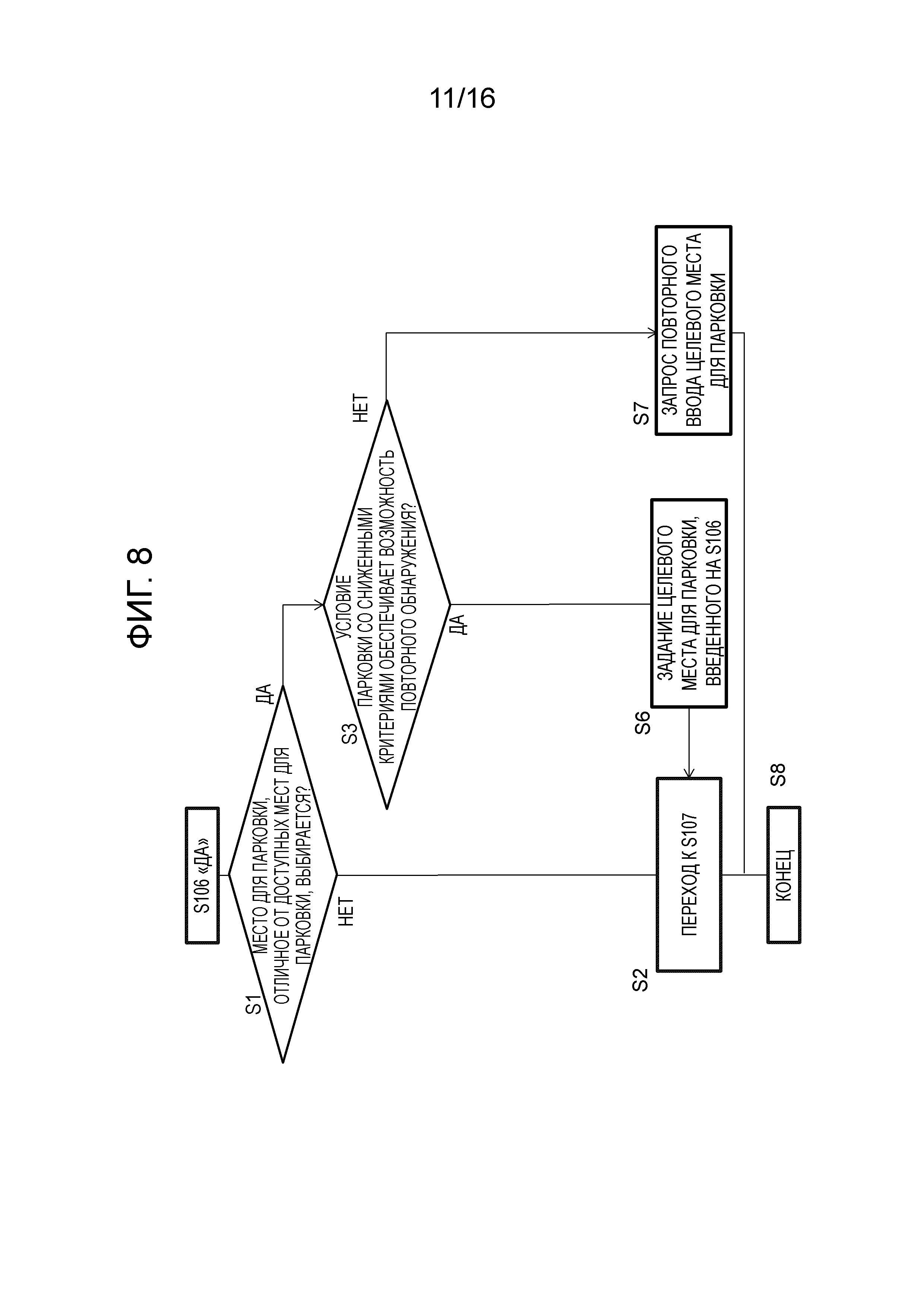
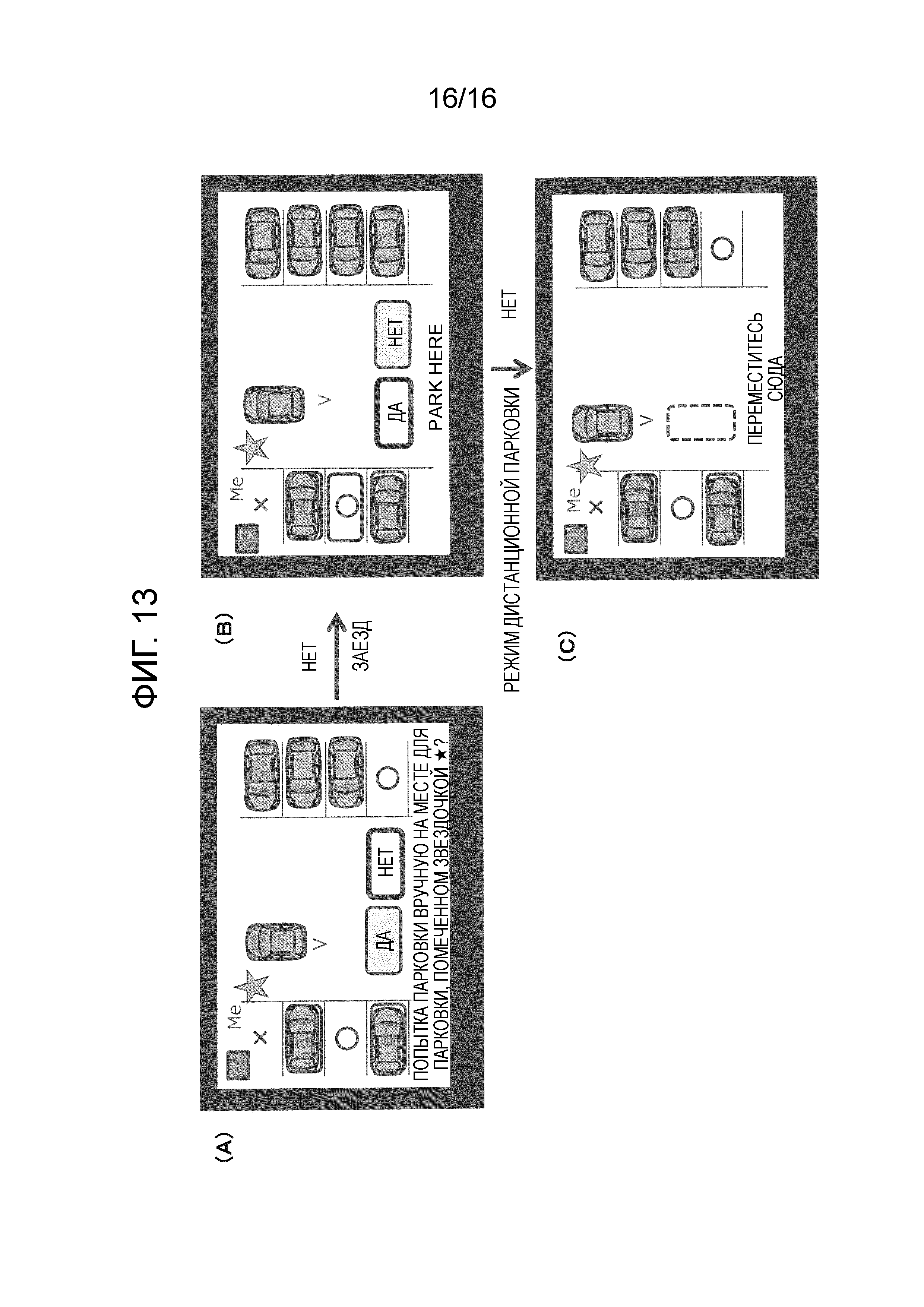
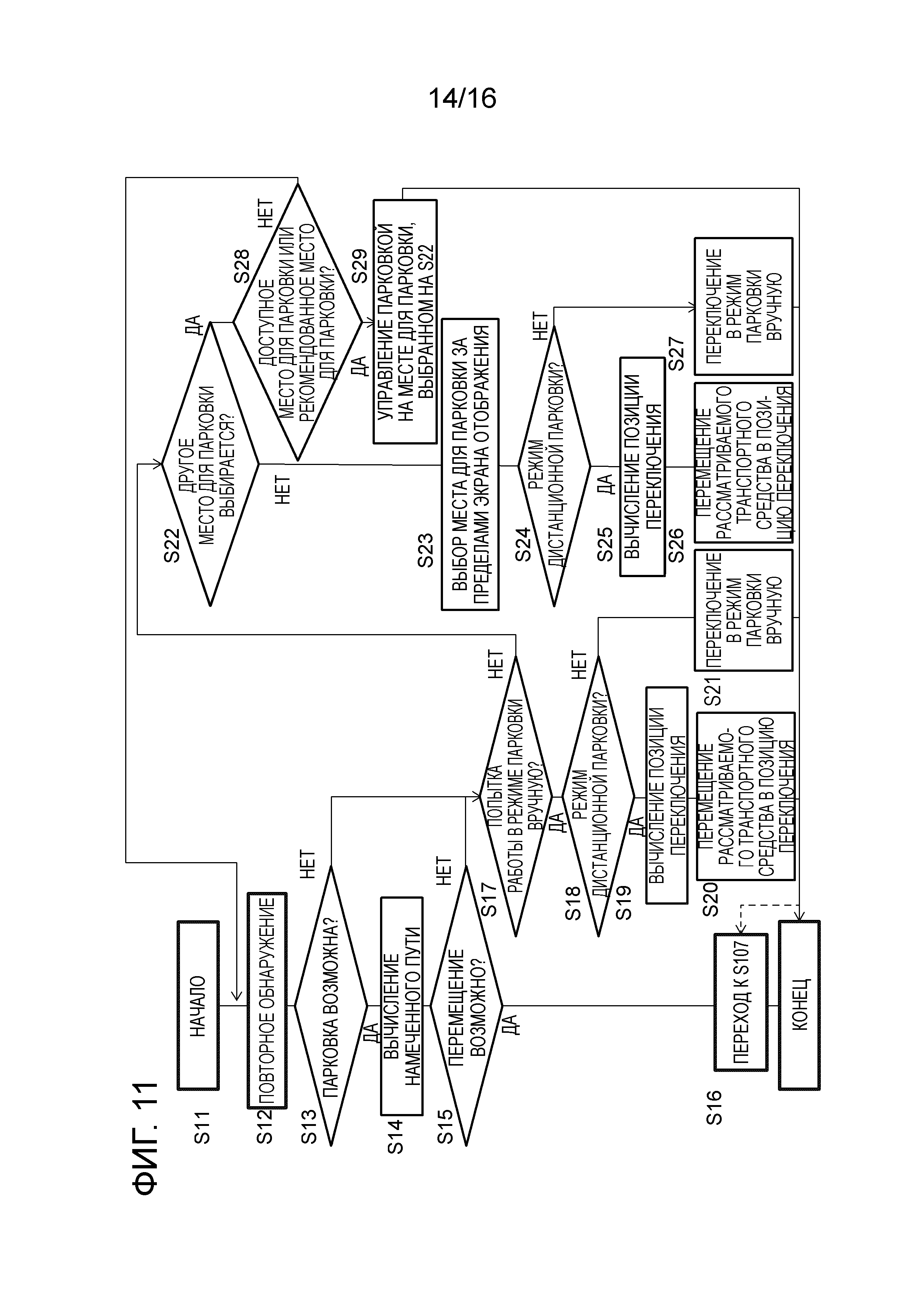
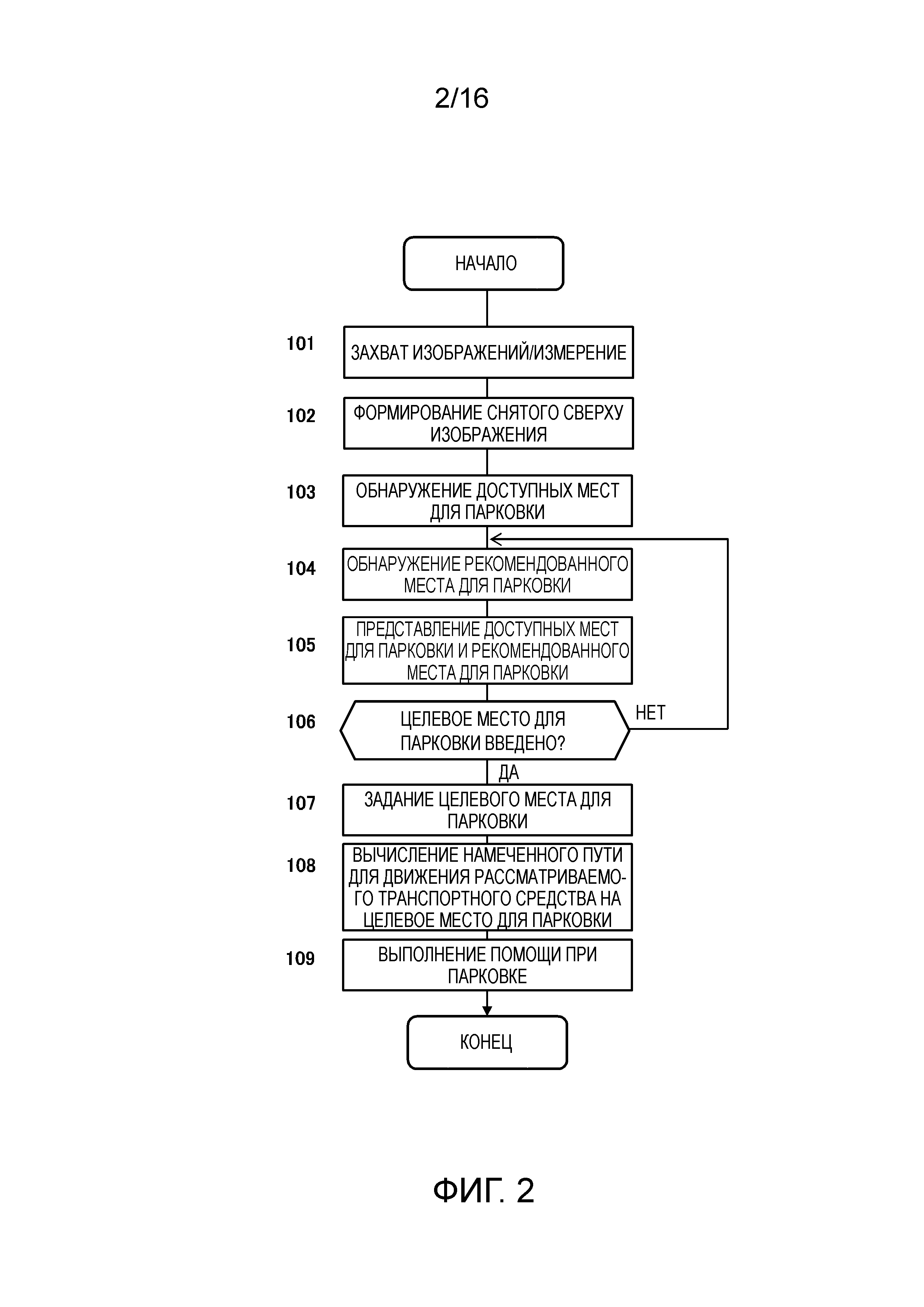
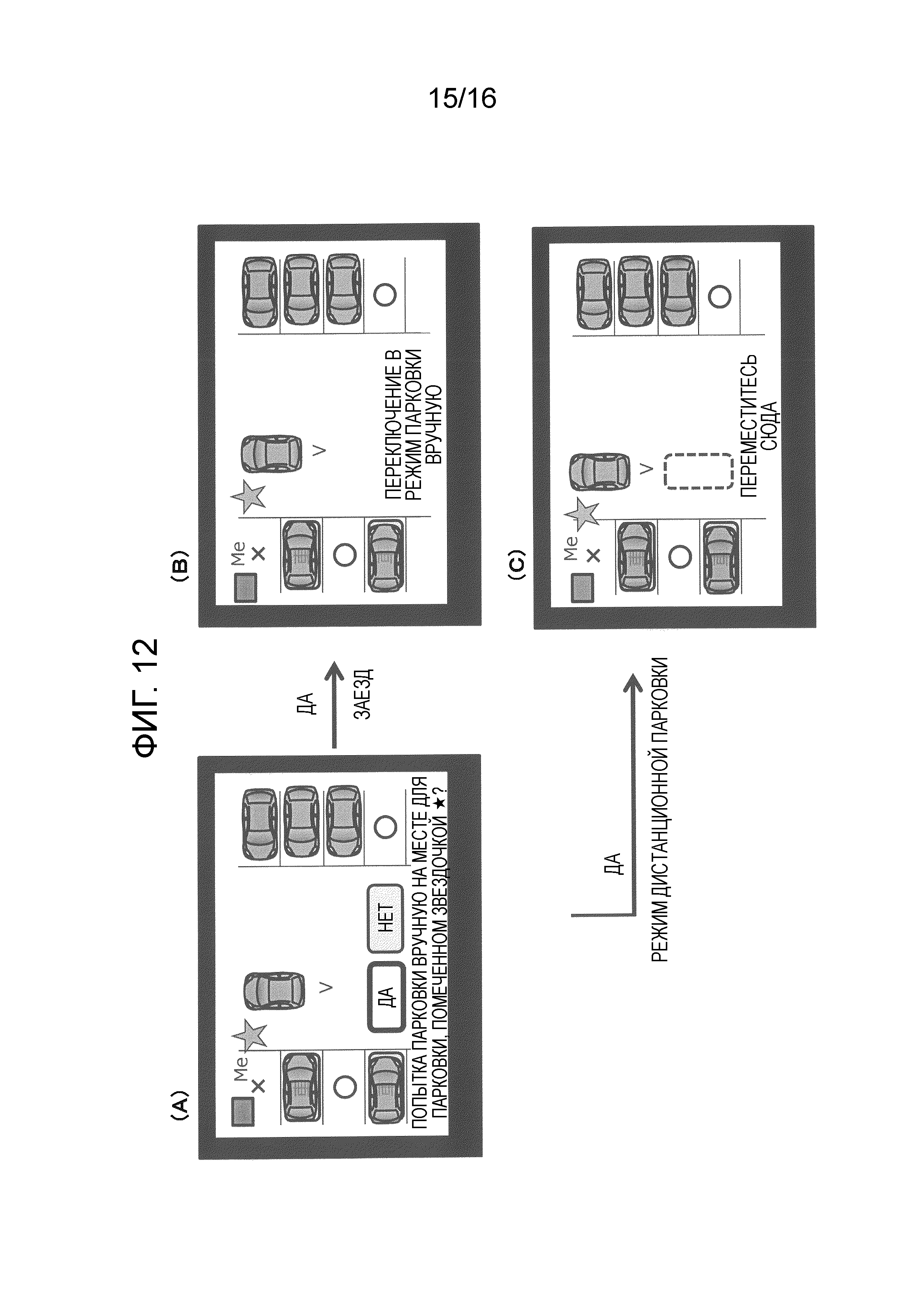
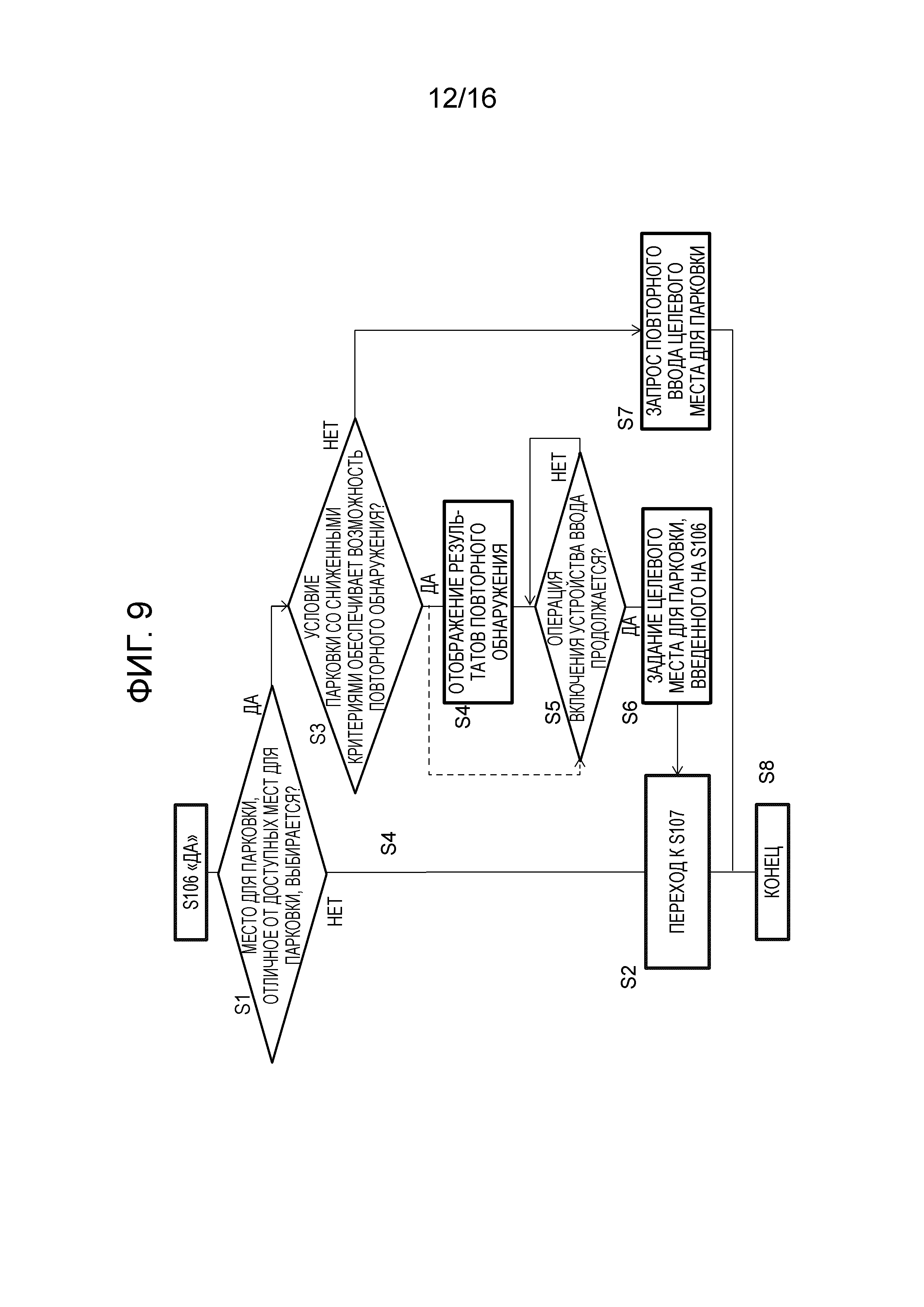
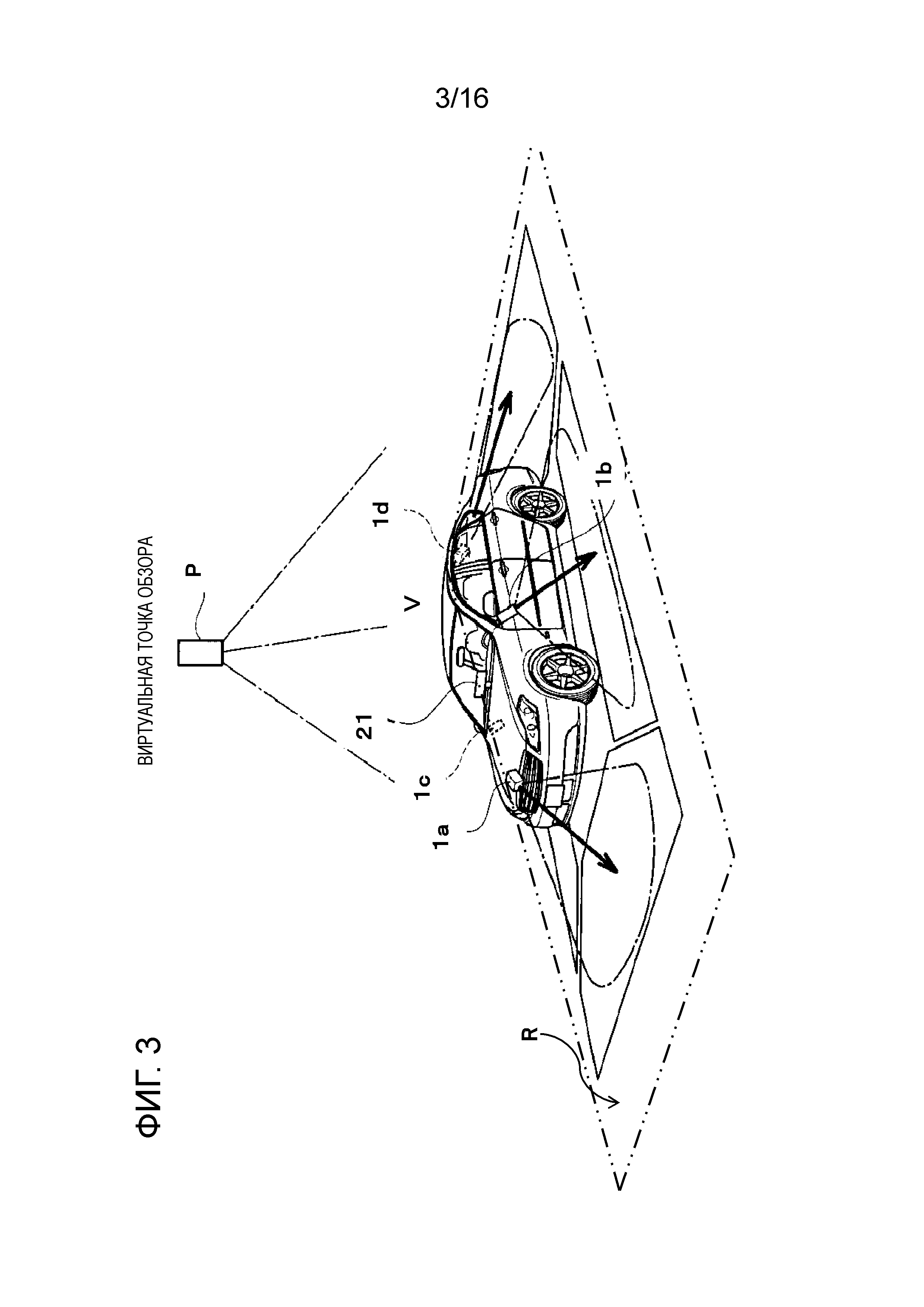
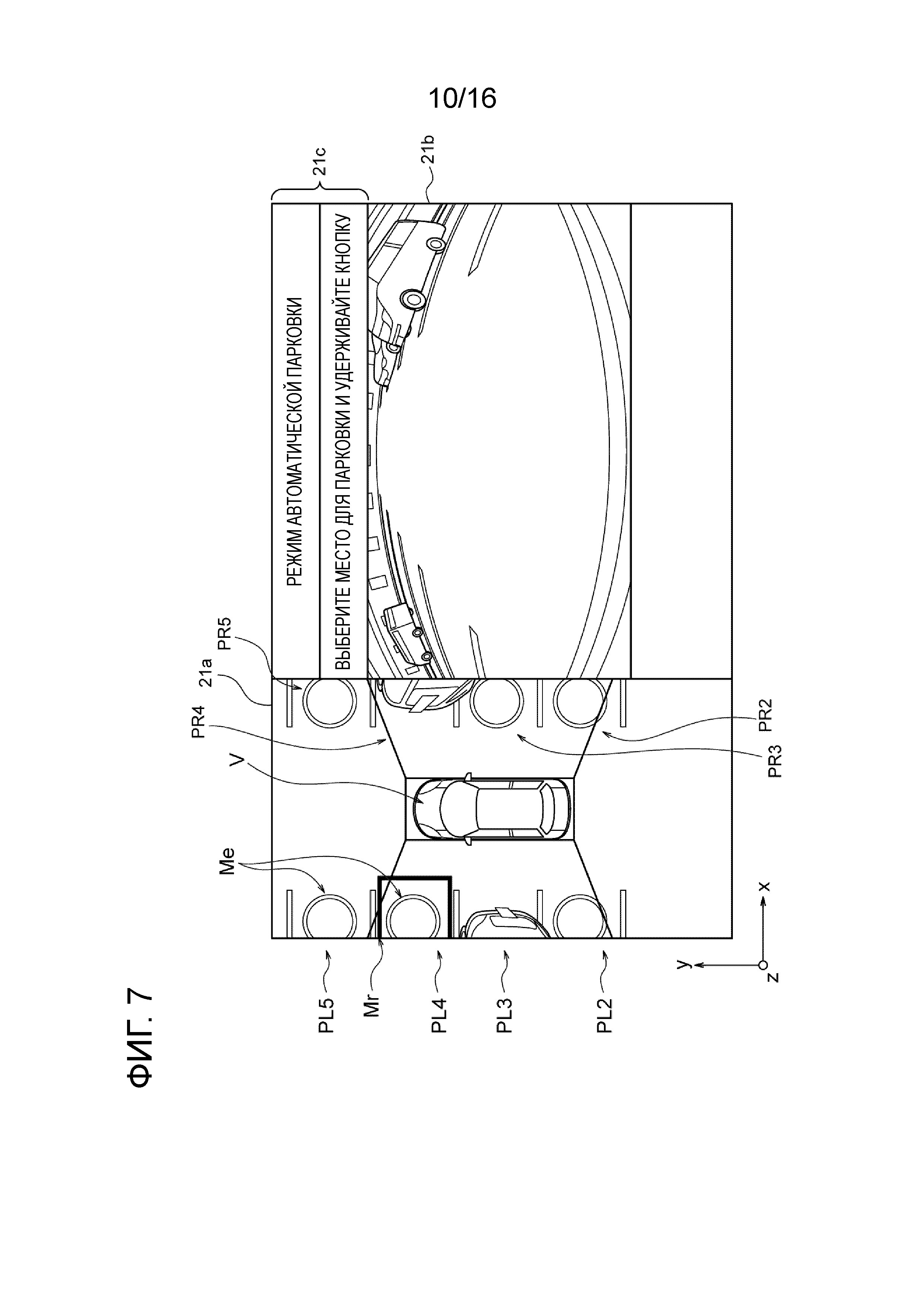
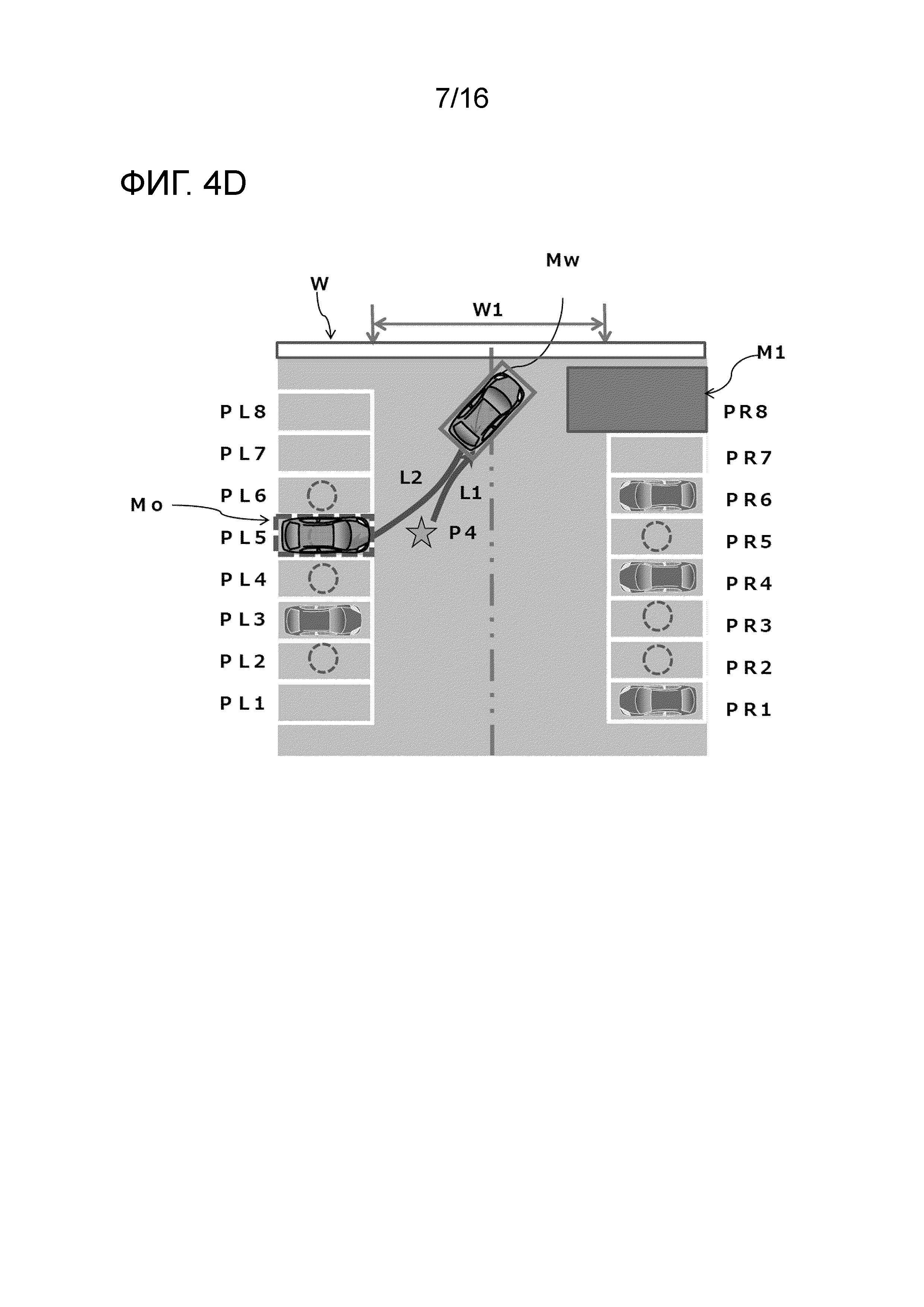
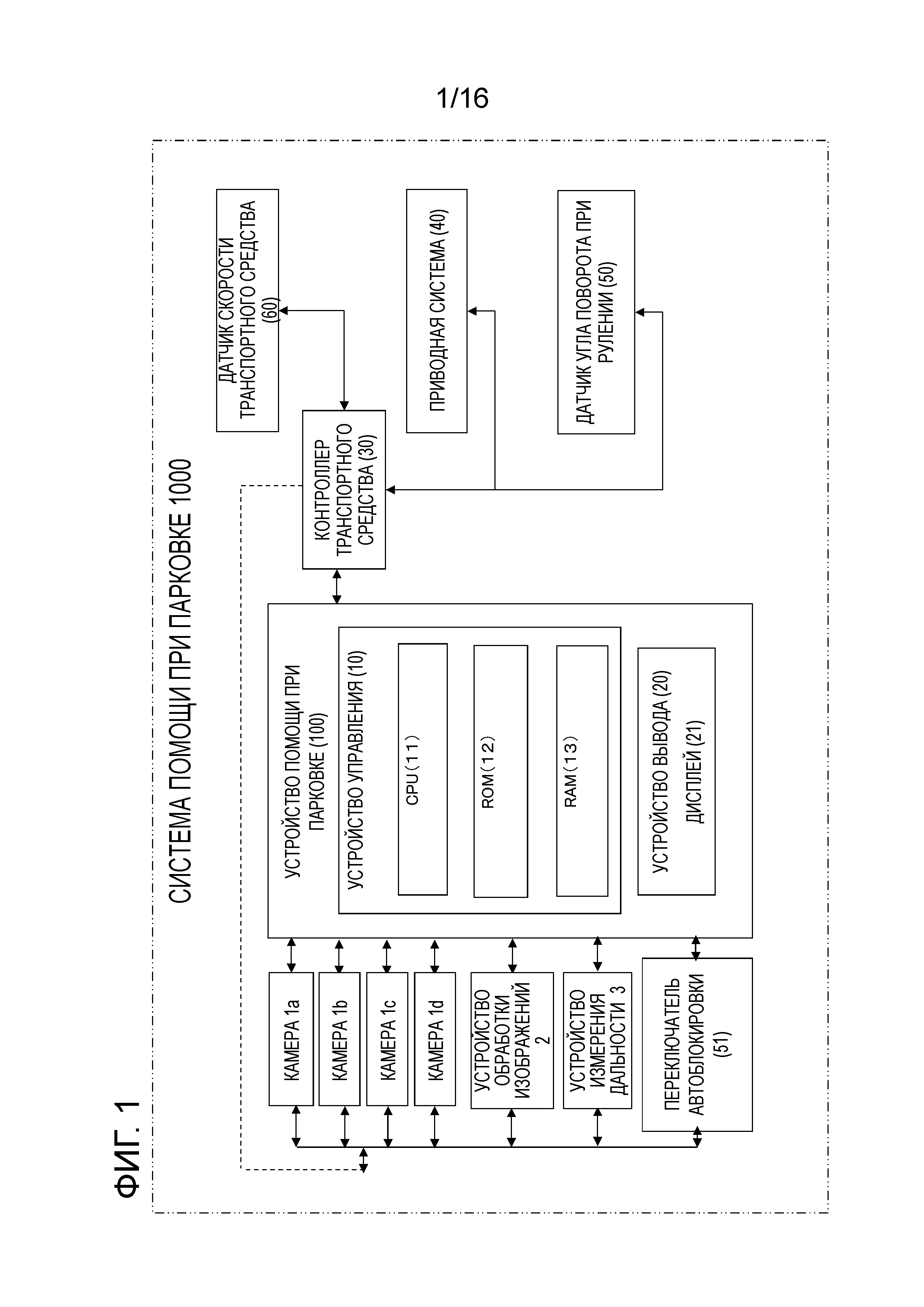
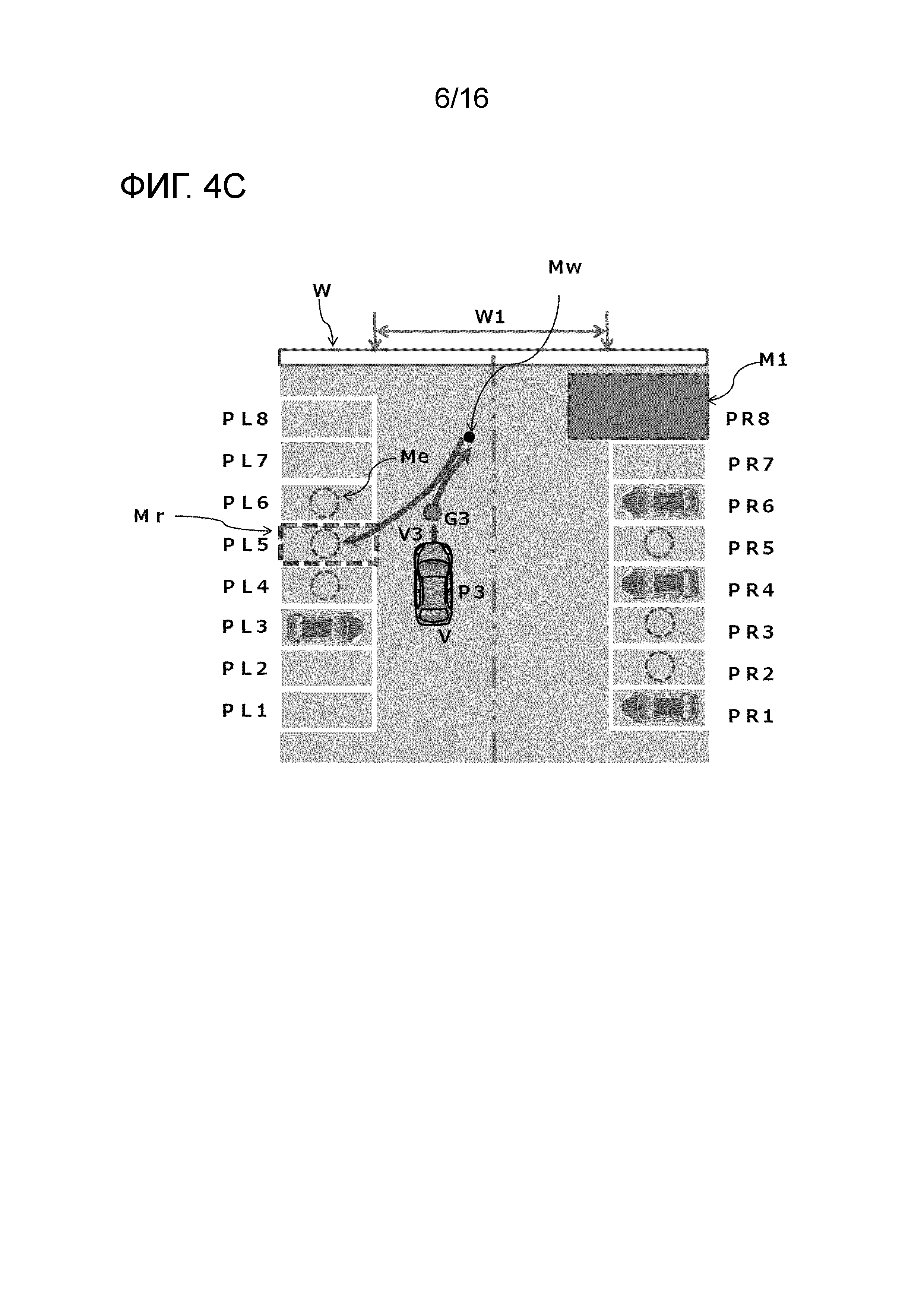
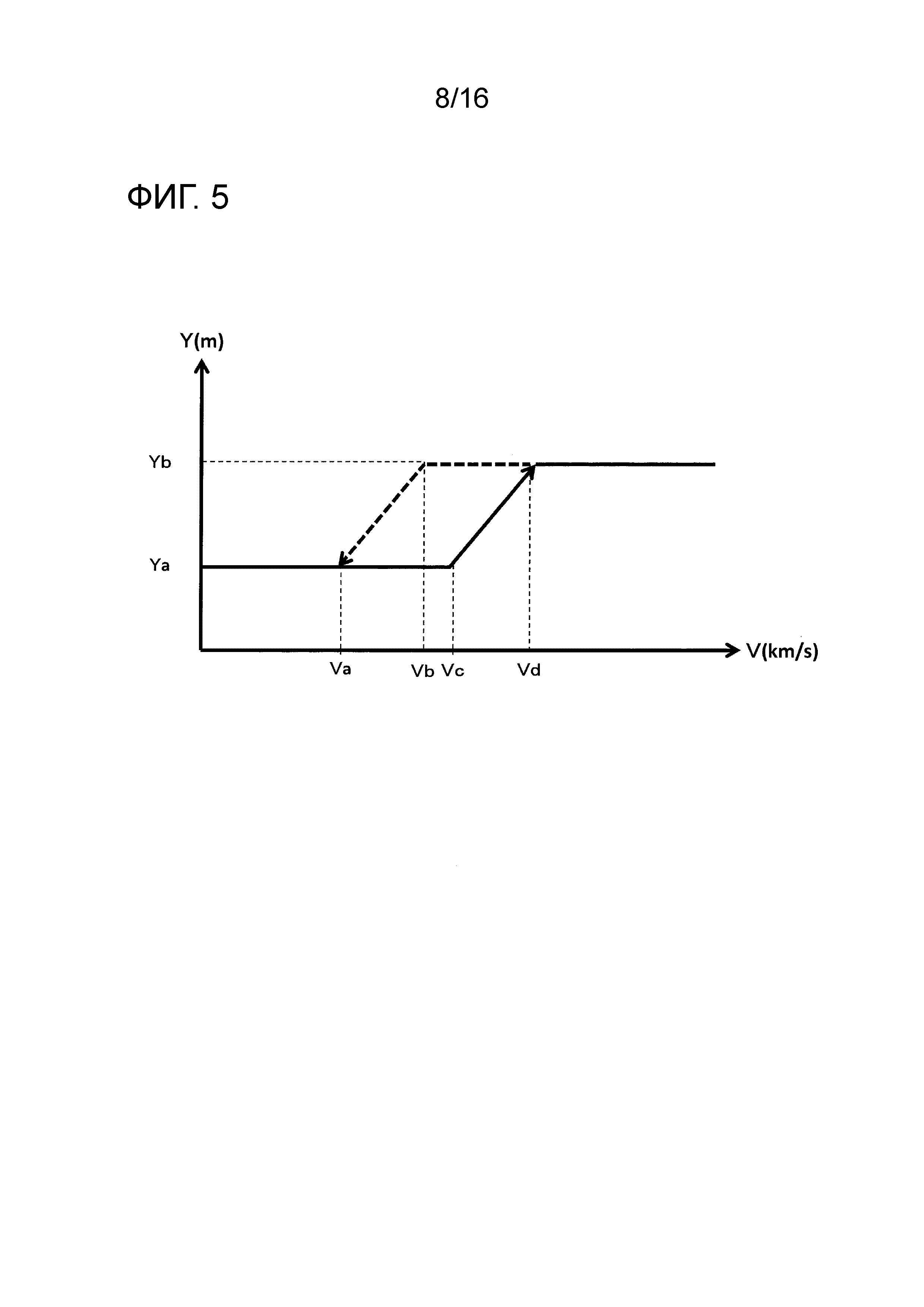
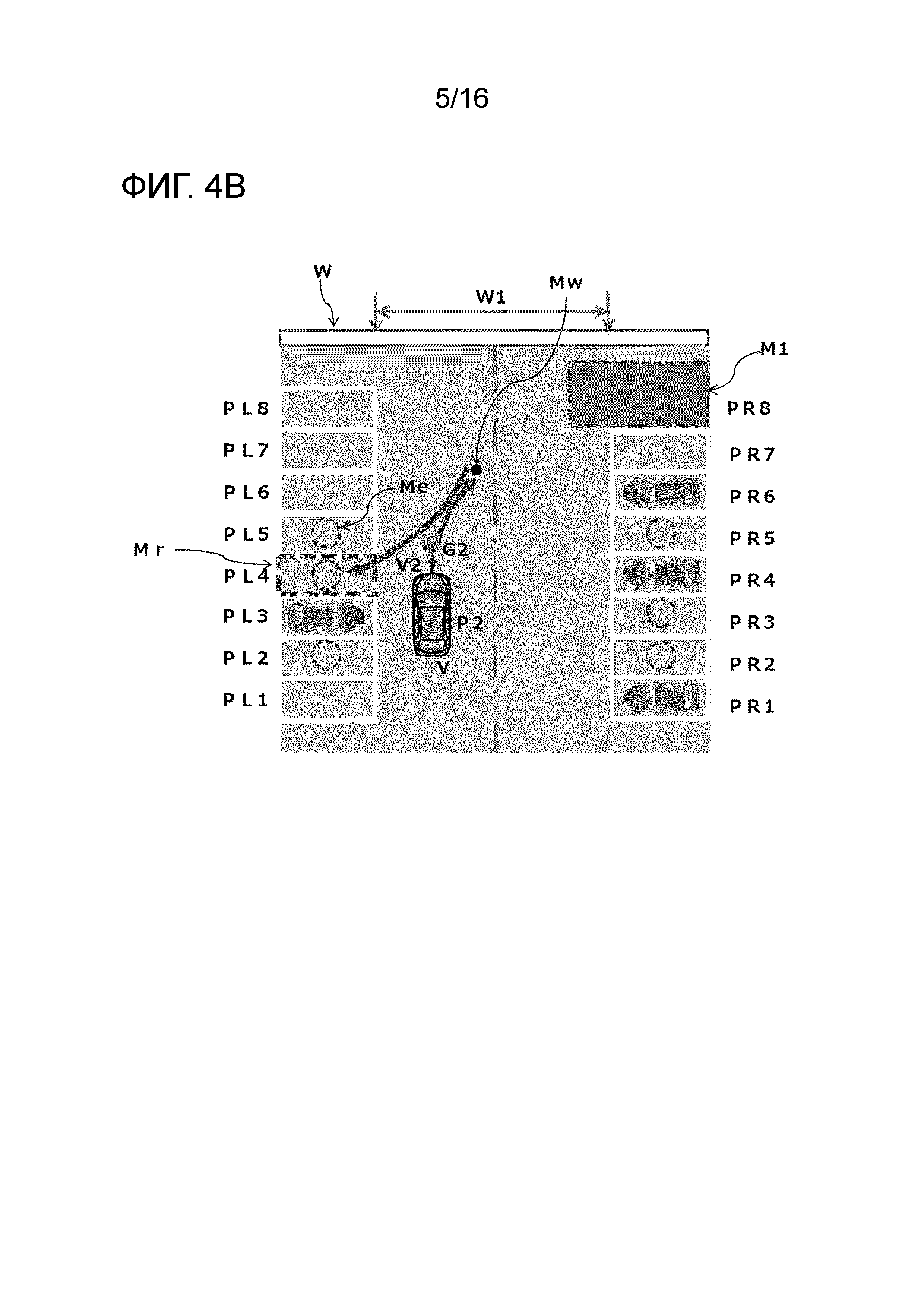
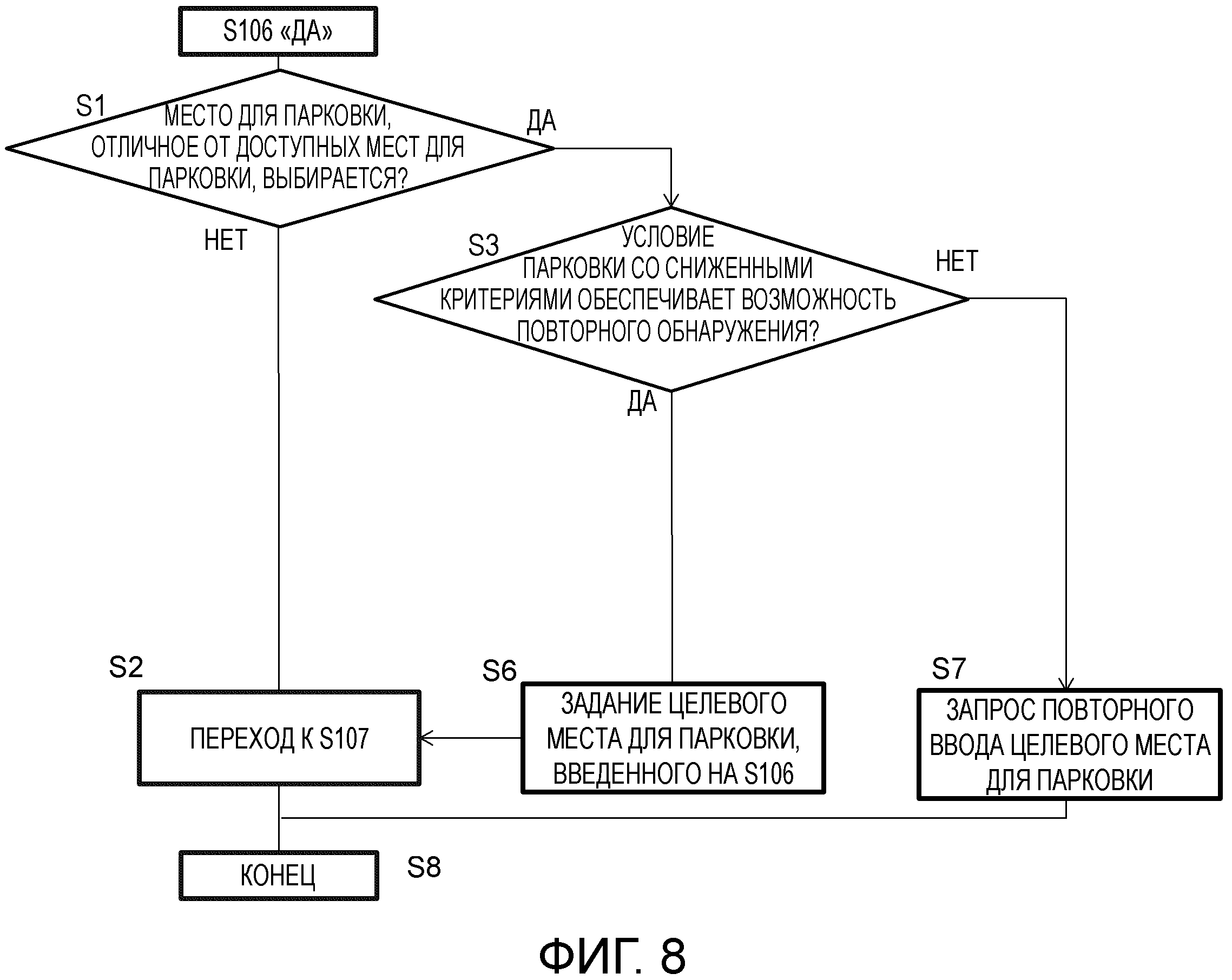
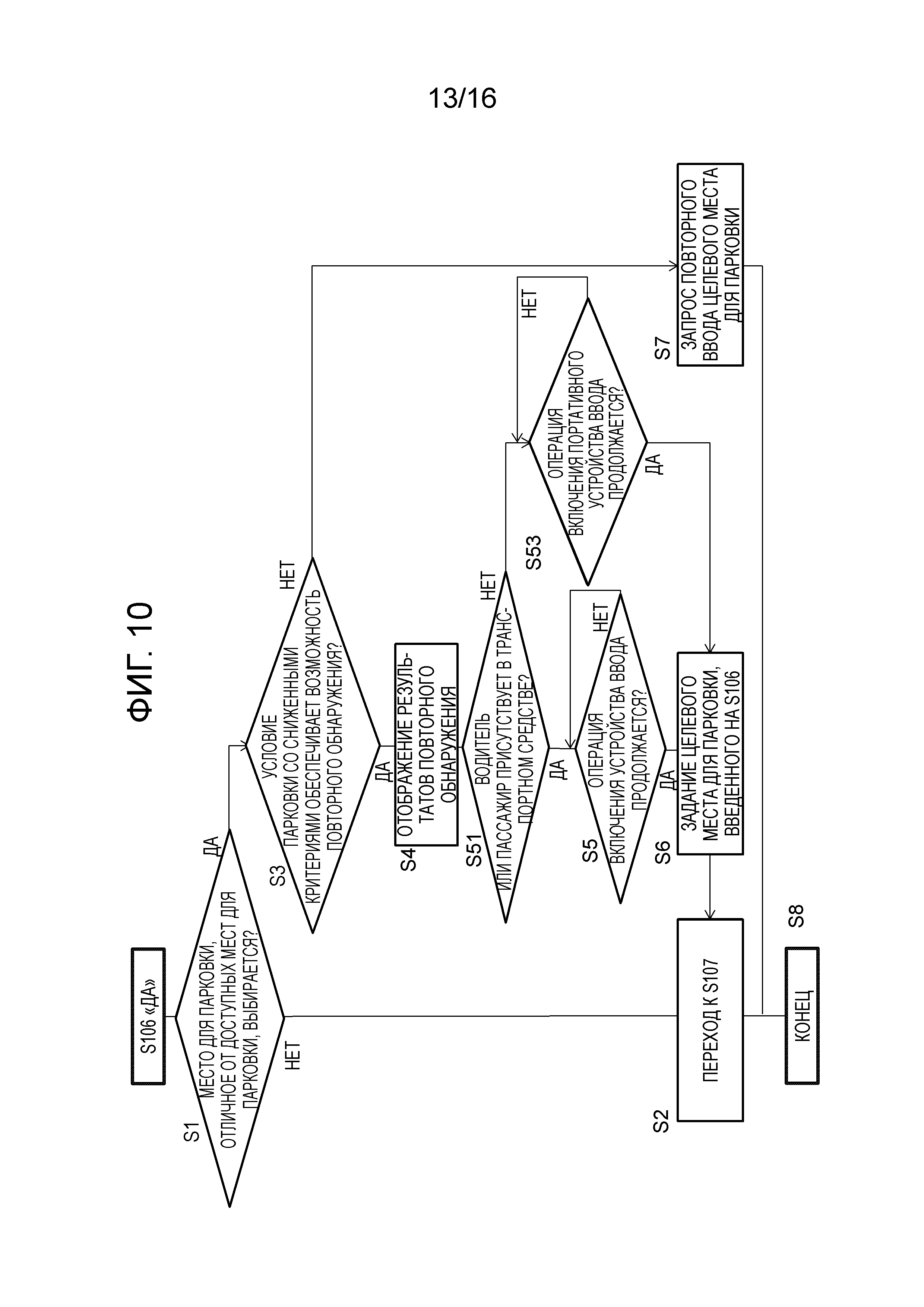
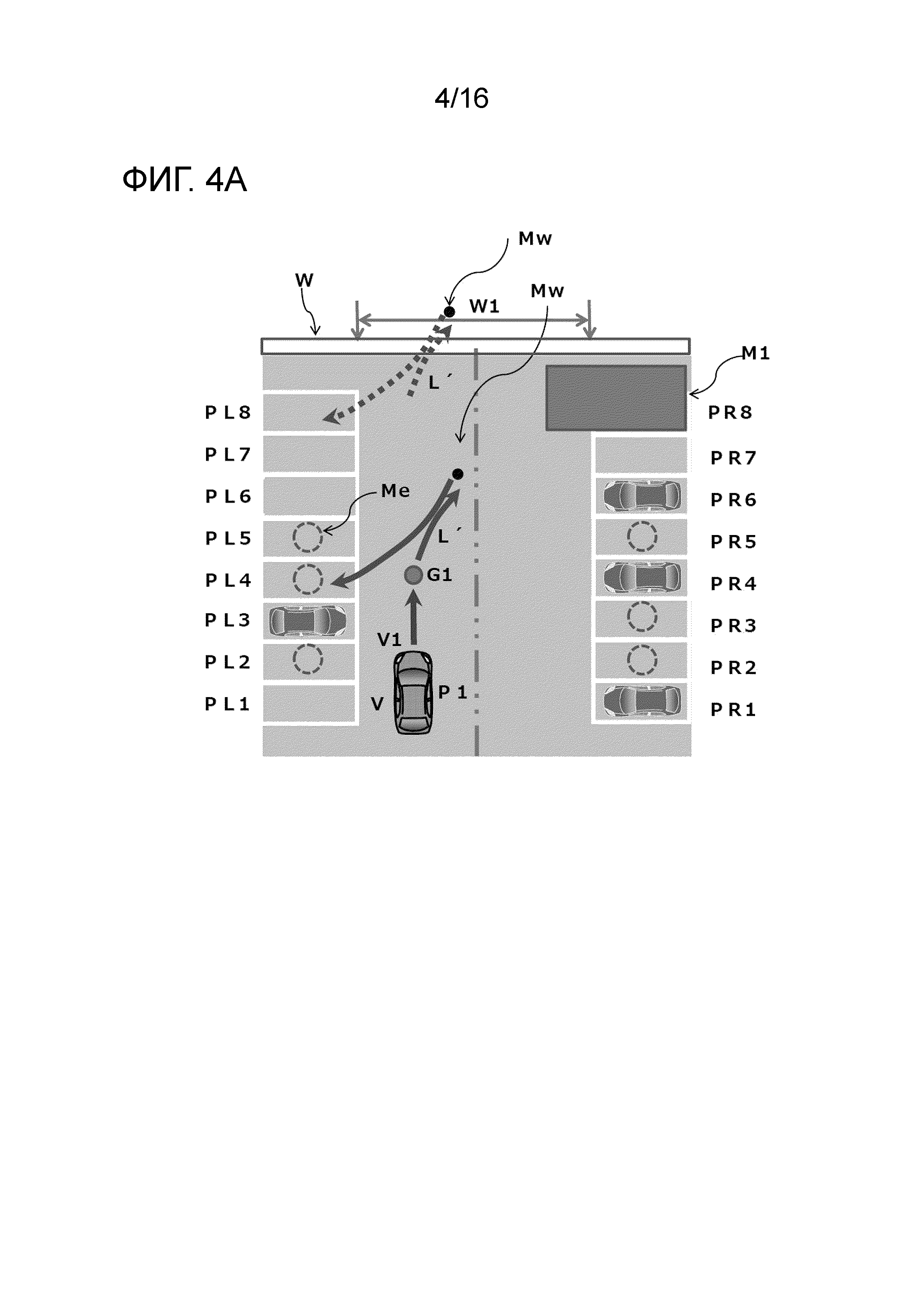
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Помощник при вождении транспортного средства и способ помощи при вождении транспортного средства
Устройство помощи при вождении транспортного средства и способ помощи при вождении транспортного средства
Устройство контроля вождения
Устройство обнаружения трехмерного объекта и способ обнаружения трехмерного объекта
Устройство обнаружения трехмерных объектов
Устройство помощи при вождении и способ обнаружения транспортного средства рядом с ним
Система обнаружения периодических стационарных объектов и способ обнаружения периодических стационарных объектов
Система помощи при вождении и способ определения дождевых капель для нее
Устройство обнаружения сплошных объектов и способ обнаружения сплошных объектов
Устройство помощи при вождении транспортного средства

