Результат интеллектуальной деятельности: Система замещения зеркал и система помощи водителю
Вид РИД
Изобретение
Область изобретения
Изобретение относится к системе оптического наблюдения для транспортного средства, прежде всего коммерческого транспортного средства. Кроме того, изобретение относится к содержащей такую систему оптического наблюдения системе замещения зеркал для автомобиля и содержащей такую систему оптического наблюдения системе помощи водителю.
Уровень техники
В настоящее время системы оптического наблюдения во все большей степени используются на транспортных средствах или в транспортных средствах, например система оптического наблюдения используется на транспортном средстве в контексте дополнительной системы обычных зеркал, например для обеспечения помощи при парковке для водителя пассажирского транспортного средства. Кроме того, системы оптического наблюдения во все большей степени используются в контексте так называемых систем замещения зеркал, где зеркала, которые предназначены для транспортных средств, например внешние зеркала (основные зеркала), внутренние зеркала легковых автомобилей или широкоугольные зеркала и зеркала обзора переднего бампера коммерческих транспортных средств, полностью замещены. В таких системах замещения зеркал соответствующее поле зрения, которое обычно делается видимым посредством зеркала, постоянно и в реальном времени демонстрируется водителю транспортного средства на мониторе или другом устройстве отображения, например внутри транспортного средства, так что водитель транспортного средства может видеть соответствующее поле зрения в любое время, хотя зеркала отсутствуют. Кроме того, системы оптического наблюдения на транспортном средстве используются в контексте так называемой продвинутой системы помощи водителю, где или захваченные системой оптического наблюдения данные, например в зависимости от соответствующей текущей дорожной ситуации, демонстрируются водителю транспортного средства, или где захваченные данные изображения оцениваются для управления другими компонентами транспортного средства, например в контексте расстояния и/или обнаружения препятствий, обнаружения состояния дороги, помощи в удержании в пределах полосы движения, распознавания дорожных знаков и т.п.
Зачастую для использования в транспортном средстве или из-за юридических предписаний, или из-за объекта и, соответственно, предполагаемой области применения системы оптического наблюдения, захватывающее устройство (например, оптическая камера) системы оптического наблюдения должно удовлетворять специфическим требованиям, например в отношении подлежащего захвату системой оптического наблюдения разрешения, углового диапазона, требованиям в отношении резкости с учетом глубины изображения и т.п. Эти требования, например разрешение на извлечение требуемых данных из захваченных данных изображения, являются во временном отношении противоположными, так что, например, в одно и то же время должен записываться широкий угловой диапазон и одновременно по меньшей мере в одной области/части захваченного углового диапазона должны быть достигнуты высокое разрешение и глубина фокуса. Таким образом, в комплексной системе оптического наблюдения на транспортном средстве обычно необходимо обеспечить несколько захватывающих устройств, даже если они направлены к одной и той же или к перекрывающимся областям вокруг транспортного средства, и затем объединять захваченные несколькими захватывающими устройства данные изображения, например, в объединенное изображение. Факультативно, за счет использования нескольких захватывающих устройств каждому захватывающему устройству может быть назначена его собственная функция в отношении разных, возможно противоположных требований, и затем захваченные несколькими захватывающими устройствами данные изображения могут быть проанализированы так, что из каждого изображения, например для системы помощи водителю, извлекается соответствующим образом заданная и размещенная информация.
На практике это означает, что обычно, например в системе замещения зеркал, отдельные поля зрения должны захватываться соответственно отдельными захватывающими устройствами, то есть по меньшей мере одним захватывающим устройством на поле зрения. Для этой цели уровень техники, прежде всего, обеспечивает системы оптического наблюдения на транспортном средстве, где обеспечиваются несколько отдельных датчиков изображения и оптических систем, то есть обеспечиваются отдельные устройства захвата, данные изображения которых затем объединяются путем сшивки. Факультативно, также известно обеспечение общей оптической системы, имеющей несколько датчиков изображения, которые затем объединяются в большую поверхность датчика изображения, делая, таким образом, возможным захват более крупного изображения посредством общей оптической системы, но отдельных (нескольких) датчиков изображения.
Цель изобретения
Исходя из этого, целью изобретения является разработка системы оптического наблюдения для транспортного средства, в которой комплексные требования к качеству и диапазону данных изображения могут быть также реализованы как можно гибко посредством одного захватывающего устройства, которое содержит единственный датчик изображения с единственной поверхностью датчика изображения и единственным оптическим элементом. Кроме того, целью является разработка системы замещения зеркал, а также системы помощь водителю, которая способна реализовать с малыми усилиями комплексные требования к захвату изображения для системы замещения зеркал и системы помощи водителю, соответственно, посредством системы оптического наблюдения.
Раскрытие изобретения
Эта цель достигнута содержащей признаки п. 1 системой замещения зеркал и содержащей признаки п. 27 формулы системой помощи водителю. Предпочтительные варианты осуществления определены в зависимых пунктах формулы изобретения.
Предлагаемая в изобретении система замещения зеркал является частью коммерческого транспортного средства (в частности грузового автомобиля или автобуса) и содержит по меньшей мере одну систему оптического наблюдения, содержащую захватывающее устройство, включающее в себя оптический элемент и датчик изображения, имеющий поверхность датчика изображения и выполненный для захвата части окружающей обстановки транспортного средства. Оптический элемент имеет дисторсию с кривой r=f(α) дисторсии, где r является расстоянием от отображенной на поверхности датчика изображения точки объекта до точки пересечения оптической оси с поверхностью датчика изображения, и α является углом между оптической осью оптического элемента и падающим в оптический элемент лучом от точки объекта. Кривая дисторсии r=f(α) для rw=f (αw) имеет точку (αw; rw) перегиба в области 0<r<rmax, для которой применимо r''=f''(αw)=d2r/dα2(αw)=0, причем rmax является расстоянием r=f(αmax) на поверхности (304) датчика изображения от оптической оси (302) до наиболее удаленной граничной точки поверхности (304) датчика изображения. Для кривизны кривой дисторсии применимо
r''=f''(α)<0 для 0°<α<αw
r''=f''(α)>0 для αw<α<αmax.
Кроме того, предлагаемая в изобретении система замещения зеркал также содержит блок обработки для обработки данных захватывающего устройства и/или устройство отображения для отображения видимым для водителя транспортного средства образом захваченной захватывающим устройством информации. При этом захватывающее устройство выполнено для захвата по меньшей мере одного из следующих полей зрения: поля зрения основного зеркала, или поля зрения широкоугольного зеркала на борту коммерческого транспортного средства, или поля зрения бордюрного зеркала, или поля зрения зеркала обзора переднего бампера. Оптическая ось оптического элемента захватывающего устройства пересекает поле зрения или одно из полей зрения, причем оптическая ось оптического элемента пересекает одно из полей зрения в точке пересечения на максимальном расстоянии в 5 м от боковой граничной линии транспортного средства, причем боковая граничная линия является линией пересечения плоскости, параллельной центральной продольной плоскости транспортного средства и проходящей через самую крайнюю боковую точку транспортного средства, с горизонтальной плоской дорогой.
В данном описании систему оптического наблюдения, содержащую устройство захвата, включающее в себя оптический элемент и датчик изображения, имеющий поверхность датчика, следует понимать как систему оптического наблюдения, содержащую по меньшей мере одно устройство захвата, как оно определено в п. 1 формулы изобретения. Кроме того, захватывающие устройства могут быть обеспечены в контексте системы оптического наблюдения, которая или также выполняет требования п. 1 формулы изобретения или выполнена по-другому, например для захвата поля зрения слева и справа от транспортного средства. Важно, что определенное в п. 1 формулы изобретения захватывающее устройство системы оптического наблюдения содержит точно один оптический элемент и точно один имеющий поверхность датчика датчик изображения, и дополнительно выполненное как определено в п. 1 формулы изобретения.
Система оптического наблюдения основана на идее выполнения оптического элемента захватывающего устройства (например, оптического наблюдения) так, что на единственном датчике изображения может отображаться как требующая высокого разрешения область, так и посредством захватывающего устройства может быть захвачен относительно большой угол (широкий угол), и они могут отображаться на датчике изображения совместно. Датчик изображения может пониматься как по существу плоская записывающая поверхность, причем эта поверхность датчика изображения, где захваченное оптическим элементом изображение фактически отображается, называется поверхностью датчика изображения. Поверхность датчика изображения, а также датчик изображения, являются прямоугольными, то есть поверхность датчика изображения является прямоугольной поверхностью, имеющей кромку с точками кромки на соответственно двух кромках прямоугольника, который параллельны друг другу. Также датчик изображения обычно является прямоугольным и соответствует по существу форме поверхности датчика изображения.
Оптический элемент содержит, например, структуру из нескольких линз, которые расположены одна после другой и, если необходимо, дополнительные оптические компоненты, и служит для направления падающего светового луча к датчику изображения и поверхности датчика изображения, соответственно, для формирования луча и т.д. Характеристики оптического элемента, прежде всего его дисторсии, определяются выбором линз и оптических компонентов. Оптический элемент имеет оптическую ось, которая в случае вращательно-симметричной системы является осью вращения системы. Как во вращательно-симметричной системе, так и в системе, которая не является вращательно-симметричной относительно оптической оси, вдоль оптической оси в любом случае обеспечивается, что подвергшееся осуществляемый захват изображения и путь падающего светового луча через оптический элемент, соответственно, являются свободными от дисторсии, в то время как с увеличивающимся расстоянием от оптической оси возникают дисторсии, что является вызывающей местные изменения масштаба изображения геометрической аберрацией. Зачастую изменение масштаба является изменением увеличения с возрастающим расстоянием точки изображения от оптической оси и, во вращательно-симметричной системе, вращательно-симметричным вокруг точки, так называемого центра дисторсии, которая соответствует точке пересечения оптической оси и поверхности датчика изображения. В зависимости от оптической системы, дисторсии могут различаться. Например, при подушкообразных дисторсиях увеличение возрастает по направлению к кромкам поля изображения, а при бочкообразных дисторсиях оно по направлению к кромкам уменьшается.
Кроме того, оптическая ось является осью, вдоль которой падающий световой луч обычно проходит через оптический элемент неотклоненным и падает на поверхность датчика изображения.
Таким образом, система оптического наблюдения для автомобиля основывается на идее активного конфигурирования дисторсии оптического элемента путем использования и выбора образующих оптический элемент специфических линзовых структур, так что одновременно могут быть достигнуты такие требования, как, например, широкоугольное изображение, то есть изображение, имеющее большой угол изображения, и изображение, которое по существу свободно от дисторсии или имеет только небольшие дисторсии, с высоким разрешением для желательных/требуемых частей изображения. Для этой цели оптический элемент имеет дисторсию с кривой дисторсии r=f(α), причем r - это расстояние от отображаемой на поверхности датчика изображения точки объекта до точки пересечения оптической оси с поверхностью датчика изображения, а α - это угол между оптической осью оптического элемента и падающим на оптический элемент от точки объекта лучом. Кривая дисторсии r=f(α) имеет точку (αw; rw) перегиба, предпочтительно точно одну точку (αw; rw) перегиба в области 0<r(α)<rmax, причем rmax - это расстояние r=f(αmax) на поверхности датчика изображение от оптической оси до краевой точки поверхности, которая находится от нее на наибольшем расстоянии. В данном случае точка объекта является точкой, из которой излучается падающий луч света, который отображается на поверхности датчика изображения за счет прохождения падающего луча света через оптический элемент. Угол α между оптической осью оптического элемента и падающим на оптический элемент от точки объекта лучом соответствует минимальному требуемому для соответствующей точки объекта апертурному углу объектива, и в дальнейшем называется углом α объекта. Другими словами, угол α объекта является углом, заключенным между оптической осью и падающим на оптическую систему от точки объекта лучом света, пока он находится за пределами оптической системы или оптического элемента. Следовательно, угол (90°-α) является углом между падающим лучом в точке, где световой луч входит в оптический элемент, и плоскостью, которая проходит через эту точку и является перпендикулярной оптической оси.
Таким образом, угол α объекта относится к углу, заключенному между падающим на оптический элемент от точки объекта за пределами оптического элемента световым лучом и оптической осью. После прохождения через оптический элемент эта точка объекта соответствующим образом отображается на поверхности датчика изображения.
Таким образом, кривая r=f(α) дисторсии оптического элемента имеет на поверхности датчика изображения точку перегиба, для которой применима вторая производная кривой r=f(α) дисторсии, то есть r''=f''(α)=0. Одновременно в системе координат α, r в области между началом кривой дисторсии и краевой точкой поверхности датчика изображения, которая является самой дальней от начала на поверхности датчика изображения, кривая дисторсии имеет изогнутый влево участок на одной стороне точки перегиба и изогнутый вправо участок на другой стороне точки перегиба, причем изогнутый вправо участок (r''=f''(α)<0) присутствует в области 0°<α<αw, а изогнутый влево участок (r''=f''(α)>0) присутствует в области of αw<α<αmax, причем αmax задается ограничением поверхности датчика изображения. αmax является углом α, который соответствует максимальному расстоянию rmax от оптической оси до самой дальней краевой точки поверхности датчика изображения. Например, если оптическая ось расположена центрально на поверхности датчика изображения, то есть в центроиде по существу прямоугольного датчика изображения, тогда rmax соответствует расстоянию от оптической оси на поверхности датчика изображения до (произвольной) краевой точки прямоугольника. Если оптическая ось расположена эксцентрично относительно центра, то есть не в центроиде поверхности датчика изображения, тогда rmax определяется расстоянием от оптической оси до кромки прямоугольника, которая в случае по существу прямоугольного датчика изображения является самой далекой от оптической оси. Начало системы координат α, r соответствует оптической оси на поверхности датчика изображения.
За счет использования привой r=f(α) в том виде, как она была описана, таким образом может быть достигнут специфический или определенный относительно большой свободный от дисторсии или по существу свободный от дисторсии отображенный участок с высоким разрешением вблизи точки пересечения оптической оси с датчиком изображения и оптической осью на датчике изображения, в то время как одновременно может быть захвачена большая часть угла где, для больших значений α, то есть для расположенных дальше от оптической оси точек объекта, может быть достигнуто относительно высокое разрешение, которое, например, еще достаточно для отображения, например, законодательно установленных полей зрения. В данном случае нет необходимости в использования захватывающего устройства, которое имеет чрезвычайно высокое разрешение и, следовательно, приводит к большим наборам данных. Как результат, для коррекции дисторсии не требуется или требуется лишь небольшая постобработка данных изображения для коррекции дисторсии, которая во всяком случае не должна оказывать влияние, прежде всего увеличивать, действующее/существующее разрешение.
Прежде всего, имеющая S-образную форму кривая дисторсии делает возможным единственный датчик изображения с относительно низким разрешением для того чтобы, несмотря на это, обеспечить представление изображения, которое в отношении резкости, разрешения и подобных требования, а также области изображения, позволяет захватывать два поля зрения вокруг коммерческого транспортного средства посредством единственного захватывающего устройства и отображать их в контексте системы замещения зеркал на мониторе или устройстве отображения, даже если одно из полей зрения является полем зрения широкоугольного зеркала. Вследствие того, что могут быть использованы датчик изображения и устройство захвата соответственно с относительно низким разрешением, можно выполнить систему экономичным и упрощенным образом, поскольку в блоке обработки, который обрабатывает данные захватывающего устройства, должен обрабатываться меньший объем данных и, соответственно, обрабатывающие объем данных компоненты, такие как, например, вычислительный блок и рабочая память захватывающего устройства, могут быть выполнены меньшими и, таким образом, более экономичными. Кроме того, в случае похожих конструкций блока обработки скорость обработки выше и загрузка системы, соответственно, ниже, так что, с одной стороны, может выполняться быстрая обработка данных, а другой стороны, блок обработки, прежде всего основная электронная система, нагревается меньше и, таким образом, делает возможным упрощенное управление теплообменом.
Помимо факта, что единственное общее/объединенное захватывающее устройство может, например, захватывать данные двух полей зрения, нет необходимости в объединении данных разных захватывающих устройств, по меньшей мере не в той степени, в которой одно общее захватывающее устройство захватывает требуемые подобласти окружающей обстановки транспортного средства. Кроме того, легче объединять и размещать уменьшенное число требуемых захватывающих устройств на автомобиле.
В то же время посредством кривой дисторсии может быть достигнуто очень высокое разрешение, где оно необходимо или требуется, то есть в наиболее важной области окружающей обстановки транспортного средства, которая находится в захваченной подобласти окружающей обстановки транспортного средства. Наконец, можно использовано всю поверхности датчика изображения так, что достаточно высокие разрешения могут быть достигнуты по всей поверхности датчика изображение, так что часть датчика изображения, считываемая блоком обработки данных, при необходимости может быть перемещена/сдвинута, то есть изменена, на датчике изображения. Такое перемещение (панорамирование) считаной части может выполняться, например, в зависимости от дорожной ситуации или если водитель транспортного средства хочет отрегулировать вручную захваченную захватывающим устройством область, которая может отображаться на устройстве отображения транспортного средства. Это означает, что нет необходимости обеспечивать механическую регулировку захватывающего устройства для регулировки видимой площади/области. Напротив, это может выполняться путем "сдвига" данных считываемой части на поверхности датчика изображения, так что система оптического наблюдения является более экономичной и надежной со сниженной вероятностью выхода из строя.
Во вращательно-симметричном оптическом элементе кривая r=f(α) дисторсии также является вращательно-симметричной, то есть одинаковой для всех углов β вокруг оптической оси датчика изображения, причем оптическая ось отображается как точка. В не вращательно-симметричном оптическом элементе можно обеспечить для разных отображаемых вокруг оптической оси частичных угловых диапазонов разные кривые r=f(α) дисторсии, то есть rβ1=fβ1(α), rβ2=fβ2(α) … rβn=fβn(α), которые применимы к конкретным частичным угловым диапазонам вокруг оптической оси датчика изображения. По существу частичные угловые диапазоны, к которым является применимой общая кривая дисторсии, могут быть произвольно большими до тех пор, пока структуры из линз и других оптических компонентов относительно оптического элемента это позволяют.
Предпочтительно, кривая r=f(α) дисторсии системы оптического наблюдения имеет точно одну точку перегиба (αw; rw) в диапазоне 0<r(α)<rmax. Это делает возможным оптимальное использование имеющейся поверхности датчика изображение в отношении требований к системам оптического наблюдения на транспортном средстве, прежде всего, в отношении разрешения и точности, с одной стороны, и угловым диапазоном захваченного системой оптического наблюдения угла, с другой стороны.
Согласно особо предпочтительному варианту осуществления градиент r'=dr/dα кривой r=f(α) дисторсии в области 0<α<αw является максимальным в начале или в нулевой точке (r=f(0)=0) кривой дисторсии. Это означает, что в непосредственной близости к оптической оси на поверхности датчика изображения градиент кривой r=f(α) дисторсии является максимальным и затем уменьшается к точке перегиба. Максимум кривой дисторсии в нулевой точке не должен быть обязательным; однако это не исключается. Обычно достаточно, если в отображенной части кривой r=f(α) дисторсии кривая дисторсии имеет максимум относительно области 0<α<αw в нулевой точке. Это делает возможным отображение относительно большой площади вокруг оптической оси или, начиная от оптической оси в этой области, она может отображаться с максимальным или относительно большим градиентом кривой дисторсии, прежде всего относительно или по сравнению с обычными кривыми дисторсии как, например, эквидистантной кривой дисторсии. В этом случае расстояние r для одинаковых углов α на поверхности датчика изображения меньше, чем в случае кривой дисторсии, которая имеет наибольший возможный градиент в области нулевой точки или непосредственно в нулевой точке α=0, r=0.
Согласно другому особо предпочтительному варианту осуществления градиент r'=dr/dα для кривой r=f(α) дисторсии минимален в точке (αw; rw) перегиба. Подобно наибольшему возможному градиенту в нулевой точке кривой дисторсии, и в данном случае минимум следует понимать как относительный минимум для отображенной части кривой дисторсии на датчике изображения и не обязательно как абсолютный минимум по всей (виртуальной) кривой дисторсии (которая, возможно, располагается за пределами датчика изображения). Достаточно, если минимум является минимумом в отображенной части и на площади поверхности датчика изображения, соответственно, то есть минимумом в области 0°<α<αmax.
Также является предпочтительным, что градиент r'=dr/dα кривой r=f(α) дисторсии находится в диапазоне 0°<α<αmax для αmax, то есть максимален при максимальном радиусе rmax. Также этот максимум не должен быть абсолютным максимумом кривой дисторсии. Достаточно, если в этом положении расположен максимум кривой дисторсии для области αw<α<αmax.
Согласно одному варианту осуществления имеющая вышеописанные характеристики кривая дисторсии может быть реализована полиномиальной функцией  Факультативно, кривая r=f(α) может быть также обеспечена сплайном n-го порядка, то есть рисуемой не отрывая карандаша от бумаги линией. То есть она может быть также обеспечена как функция, которая шаг за шагом составлена из полиномов максимально n-го порядка. В этом случае полином, следовательно, не обеспечивается единственным полиномом, а несколькими полиномами, которые собраны шаг за шагом. Еще одной возможностью является обеспечение кривой Безье, которая является параметрически смоделированной кривой и, следовательно, также может выполнять требование наличия (точно) одной точки перегиба в диапазоне 0<r<rmax. Эти математические функции делают возможным относительно простое моделирование оптического элемента и, соответственно, кривой дисторсии оптического элемента.
Факультативно, кривая r=f(α) может быть также обеспечена сплайном n-го порядка, то есть рисуемой не отрывая карандаша от бумаги линией. То есть она может быть также обеспечена как функция, которая шаг за шагом составлена из полиномов максимально n-го порядка. В этом случае полином, следовательно, не обеспечивается единственным полиномом, а несколькими полиномами, которые собраны шаг за шагом. Еще одной возможностью является обеспечение кривой Безье, которая является параметрически смоделированной кривой и, следовательно, также может выполнять требование наличия (точно) одной точки перегиба в диапазоне 0<r<rmax. Эти математические функции делают возможным относительно простое моделирование оптического элемента и, соответственно, кривой дисторсии оптического элемента.
В одном особо предпочтительном варианте осуществления центроид поверхности обычного прямоугольного датчика изображения и точка пересечения оптической оси с поверхностью датчика изображения и изображение оптической оси на поверхности датчика изображения, соответственно, смещены относительно друг друга. Прежде всего, оптическая ось расположена эксцентрично относительно поверхности датчика изображения, то есть не расположена в центроиде. Это делает возможным задание и моделирование требуемых областей в отношении дисторсии на поверхности датчика изображений более определенным и улучшенным образом и, если необходимо, вырезать или извлекать их посредством блока обработки, например, для отображения их на устройстве отображения, или оценивать их в отношении определенных данных. Таким образом, представляющая интерес область может быть выбрана почти по всей поверхности датчика изображения или по всей поверхности датчика изображения, и может быть вырезана или считана и затем обработана блоком обработки данных.
Предпочтительно, оптический элемент реализован посредством нескольких расположенных в ряд линз, если необходимо, дополнен добавочными оптическими компонентами, например фильтрами. Например, оптический элемент содержит по меньшей мере одну имеющую отличную от частично сферической поверхности линзу, по меньшей мере одну асферическую линзу и/или по меньшей мере одну имеющую поверхность произвольной формы линзу. Особо предпочтительно объединять по меньшей мере две линзы, которые являются разными в отношении их характеристик и форм, поскольку это делает возможным обеспечение оптического элемента, имеющего (точно) одну точку (αw; rw) перегиба на его кривой r=f(α) дисторсии. Если несколько имеющих разные поверхности вращательно-симметричных линз расположены в ряд одна за другой, это приводит к кривой r=f(α) дисторсии, которая одинакова для каждого угла β поворота вокруг оптической оси. Следовательно, в этом случае оптический элемент, как целое, является вращательно-симметричным относительно своей оптической оси. Это является особо предпочтительным, когда захватывающее устройство имеет по существу вращательно-симметричные требования, например в отношении разрешения.
Факультативно, можно также обеспечить оптический элемент, имеющий дисторсии, которые не являются вращательно-симметричными относительно его оптической оси, так что первая кривая rβ1=f(α) дисторсии для угла поворота β1 вокруг оптической оси отличается от второй кривой rβ2=f(α) дисторсии для угла поворота β2 вокруг оптической оси. Однако, предпочтительно, кривые дисторсии, по меньшей мере, частично, то есть для определенным угловых диапазонов вокруг оптической оси, идентичны или очень похожи, так что могут выполняться соответствующие требования в отношении разрешения, углового диапазона и тому подобного конкретной области захваченного изображения. В принципе может быть обеспечено произвольное число кривых rβn дисторсии. Однако для не вращательно-симметричной дисторсии является достаточным, если обеспечены, по меньшей мере, участки соответственно с первой кривой rβ1=f(α) дисторсии и второй кривой rβ2=f(α) дисторсии. В случае, когда планируется не вращательно-симметричная дисторсия, желательно, что оптический элемент является анаморфотным, то есть по существу не вращательно-симметричным, так что в зависимости от угла поворота вокруг оптической оси присутствуют разные кривые дисторсии. Например, возможно, что одна или несколько образующих оптический элемент линз являются анаморфотными. Факультативно, например, может быть выбрана структура из отдельных линз или оптических компонентов оптического элемента, которая, по меньшей мере, частично является эксцентричной относительно оптической оси оптического элемента.
Кроме того, система оптического наблюдения, предпочтительно, содержит по меньшей мере один блок обработки для обработки данных захватывающего устройства и/или устройство отображения для визуального отображения захваченной посредством захватывающего устройства информации для водителя транспортного средства. Блок обработки для обработки данных может быть, например, обеспечен в контексте общего бортового компьютера транспортного средства, или может быть специально разработанным для системы оптического наблюдения отдельным блоком, или может быть встроен в саму систему оптического наблюдения. Устройство отображения выполнено, например, как монитор, как несколько мониторов, как проекция на другие компоненты транспортного средства и т.д. Наряду с визуальным устройством отображения, устройство отображения, кроме того или дополнительно, может быть встроено в звуковоспроизводящее устройство. Кроме того, оно может быть устройством отображения, которое, например в контексте системы помощи водителю, предупреждает водителя только в некоторых дорожных ситуациях, что, в свою очередь, может быть осуществлено посредством визуального отображения, акустического сигнала или осязательного сигнала, подобного, например, вибрации рулевого колеса, когда оценка посредством блока обработки захваченных системой оптического наблюдения данных изображения приводит к направлению соответствующего сигнала к устройству отображения.
Особо предпочтительным использованием системы оптического наблюдения является использование в контексте системы замещения зеркал. Системы замещения зеркал для транспортных средств использовались во все возрастающей степени, замещая таким образом обычные зеркала на транспортном средстве или в транспортном средстве. Типы зеркал, которые предписаны для транспортного средства и поэтому могут быть замещены в контексте системы замещения зеркал, обычно определяются правовыми положениями, например, в Европе регламентом No. 46 экономической комиссии объединенных наций для Европы (UN/ЕСЕ)(дополнение 45, имеющаяся в настоящее время редакция 6). Другим предметом являются так называемые дополнительные системы визуализации, которые не являются предписанными системами визуальной поддержки, которые делают возможным обзор области, которая не требуется быть постоянно и непрерывно видна водителю согласно правовым положениям. Примером такого типа дополнительной системы визуализации является, например в контексте помощи при парковке, камера заднего вида на транспортном средстве.
Во многих странах мира для автомобилей предписаны обеспечиваемое в транспортном средстве (согласно ECE-R46 "внутреннее зеркало группы I") внутреннее зеркало и (небольшое) основное зеркало (согласно ECE-R46 "главное (небольшое) зеркало группы III") на стороне водителя, а также зачастую на стороне пассажира. Для коммерческих транспортных средств внутреннее зеркало обычно не предписано, поскольку беспрепятственный обзор через заднюю часть транспортного средства через кабину водителя обычно невозможен. Напротив, наряду с другими зеркалами, предписаны основное (большое) зеркало (согласно ECE-R46 "основное (большое) зеркало группы II") и широкоугольное зеркало (согласно ECE-R46 "широкоугольное зеркало группы IV"). Основными зеркалами являются те зеркала, которые закреплены снаружи транспортного средства и являются видимыми водителю как внешние зеркала. В зависимости от нормативных документов страны для коммерческих транспортных средств могут быть предписаны добавочные зеркала, такие как, например, бордюрное зеркало (согласно ECE-R46 "бордюрное зеркало группы V") и/или зеркало обзора переднего бампера (согласно ECE-R46 "зеркало обзора переднего бампера группы VI".
Области вокруг транспортного средства, которые должны быть просматриваемыми посредством разных зеркал и, таким образом, должны быть просматриваемыми посредством системы управления видеокамерой, соответствующим образом определены/предписаны в соответствующих правовых положениях отдельных стран и территорий/регионов. Обычно определяется так называемое поле зрения, которое обозначает плоскую и горизонтальную часть дороги вокруг транспортного средства и которое должно быть видимым водителю транспортного средства постоянно, в любое время и в реальном времени.
Поле зрения внутреннего зеркала легкового автомобиля определено, например, в ECE-R46 так, что водитель транспортного средства может видеть плоскую и горизонтальную часть дороги, которая расположена центрально относительно продольной центральной плоскости транспортного средства, имеет ширину 20 м и простирается от горизонта до 60 м за местонахождением глаз водителя транспортного средства. Поле зрения для основного зеркала заднего вида для легковых автомобилей может быть определена относительно водительской стороны автомобиля так, что водитель автомобиля может видеть по меньшей плоскую и горизонтальную часть дороги, имеющую ширину 5 м, которая ограничена на борту транспортного средства плоскостью, которая параллельна продольной центральной плоскости транспортного средства и простирается через самую внешнюю часть водительской стороны транспортного средства, и которая простирается от горизонта до 30 м за местонахождением глаз водителя транспортного средства. Поле зрения основного зеркала заднего вида, кроме того, включает в себя имеющую ширину в 1 м полосу дороги, которая ограничена на борту транспортного средства плоскостью, которая параллельна вертикальной центральной продольной плоскости транспортного средства и проходит через самую внешнюю точку водительской стороны транспортного средства, и которая начинается в 4 м за проходящей через местонахождение глаз водителя вертикальной плоскостью. Поле зрения внешнего зеркала на пассажирской стороне определяется на пассажирской стороне транспортного средства аналогичным образом.
Поле зрения основного зеркала (основного зеркала заднего вида) на стороне водителя (это же относится к стороне пассажира) коммерческого транспортного средства определяется, например, в ECE-R46 так, что водитель транспортного средства может видеть по меньшей мере имеющую ширину 4 м плоскую и горизонтальную часть дороги, которая ограничена на борту транспортного средства плоскостью, которая параллельна вертикальной центральной продольной плоскости транспортного средства и проходит через самую внешнюю точку водительской стороны транспортного средства и которая простирается от горизонта до 20 м за местонахождением глаз водителя. Это поле зрения, кроме того, включает в себя полосу дороги шириной 1 м, которая ограничена на борту транспортного средства плоскостью, которая параллельна вертикальной центральной продольной плоскости транспортного средства и проходит через самую внешнюю точку водительской стороны транспортного средства, и которая начинается в 4 м за проходящей через местонахождение глаз водителя вертикальной плоскостью. Поле зрения широкоугольного зеркала, которое обеспечивается только на коммерческих транспортных средства, но не на легковых автомобилях, определяется так, что водитель транспортного средства может видеть, по меньшей мере, плоскую и горизонтальную часть дороги, которая имеет ширину 15 м и ограничена на борту транспортного средства плоскостью, которая параллельна вертикальной центральной продольной плоскости транспортного средства и проходит через самую внешнюю точку водительской стороны транспортного средства, и которая простирается по меньшей мере от 10 м до 25 м за местонахождением глаз водителя. Поле зрения широкоугольного зеркала, кроме того, дополнительно включает в себя полосу дороги, которая имеет ширину 4,5 м и ограничена на борту транспортного средства плоскостью, параллельной вертикальной центральной продольной плоскости транспортного средства, и проходит через самую внешнюю точку водительской стороны транспортного средства, и которая начинается в 1,5 м за проходящей через местонахождение глаз водителя вертикальной плоскостью.
Согласно ECE-R46, поле зрения бордюрного зеркала обеспечивается, например, так, что водитель транспортного средства может видеть, по меньшей мере, плоскую и горизонтальную часть дороги с внешней стороны транспортного средства, которая ограничена: плоскостью, параллельной вертикальной центральной продольной плоскости транспортного средства и проходящей через самую внешнюю точку пассажирской стороны транспортного средства; плоскостью, простирающейся параллельно и расположенной в 2 м от этой плоскости; плоскостью, простирающейся параллельно и в 1,75 м за плоскостью, проходящей через местонахождение глаз водителя транспортного средства; вертикальной плоскостью, простирающейся в 1 м перед и параллельно плоскости, проходящей через местонахождение глаз водителя транспортного средства, или плоскостью, которая проходит через самую внешнюю точку бампера транспортного средства, если эта плоскость простирается ближе 1 м перед вертикальной плоскостью, простирающейся параллельно через местонахождение глаз водителя транспортного средства. В транспортных средствах, где поле зрения бордюрного зеркала закреплено более чем в 2,4 м от грунта или захвачено соответствующим захватывающим устройством, описанное поле зрения простирается так, что водитель может видеть плоскую горизонтальную часть дороги вдоль борта транспортного средства и за пределами определенного выше поля зрения бордюрного зеркала, которое может быть закругленным спереди с радиусом 2 м и ограничено следующими линиями: в поперечном направлении плоскостью, которая простирается на расстоянии 4,5 м перед боковой плоскостью транспортного средства; сзади плоскостью, параллельной вертикальной плоскости, простирающейся через местонахождение глаз водителя транспортного средства, и расположенной в 1,75 м за этой плоскостью; спереди плоскостью, параллельной вертикальной плоскости, простирающейся через местоположение глаз водителя и расположенной в 3 м перед этой плоскостью.
Согласно ECE-R46, поле зрения зеркала обзора переднего бампера должно быть обеспечено так, что водитель транспортного средства может видеть/обозревать плоскую и горизонтальную часть дороги, которая ограничена следующими плоскостями: перпендикулярной поперечной плоскостью, которая проходит через самую переднюю точку в передней части транспортного средства, перпендикулярной поперечной плоскостью, простирающуюся в 2 м перед этой плоскостью; плоскостью, параллельной вертикальной центральной продольной плоскости транспортного средства, которая проходит через самую внешнюю точку водительской стороны транспортного средства, и плоскостью, параллельной вертикальной центральной продольной оси транспортного средства, которая простирается на расстоянии 2 м от самой внешней точки пассажирской стороны транспортного средства.
В описании, когда дается ссылка на поля зрения основного зеркала, широкоугольного зеркала, внутреннего зеркала, бордюрного зеркала, зеркала обзора переднего бампера и т.п., имеются в виду, соответствующим образом определенные в национальных нормативных документах соответствующие поля зрения, которые соответствуют описанным полям зрения. Если соответствующие национальные нормативные документы или определения для полей зрения отсутствуют, то описанные размеры следует рассматривать как определения для соответствующего поля зрения.
Предпочтительно, система замещения зеркал, которая, наряду с блоком обработки для захваченных системой оптического наблюдения данных, содержит устройство отображения для визуального отображения для водителя захваченной захватывающим устройством информации, выполнена так, что отображающее устройство отображает данные видимыми для водителя транспортного средства. Это может быть выполнено, например, посредством мониторов, расположенных внутри или снаружи транспортного средства или посредством проекции на компоненты транспортного средства.
Предпочтительно, система замещения зеркал выполнена для отображения на устройстве отображения средства по меньшей мере одного поля зрения видимым для водителя транспортного средства образом. Конкретно, это поле зрения может быть одним из вышеописанных полей зрения.
Согласно другому предпочтительному варианту осуществления система замещения зеркал выполнена для захвата поля зрения основного зеркала и поля зрения широкоугольного зеркала на одном и том же борту транспортного средства посредством общей/объединенной системы захвата системы оптического наблюдения, имеющей общий/объединенный датчик изображения, то есть единственный датчик изображения, и отображения их для водителя на устройстве отображения. Прежде всего, благодаря характерной кривой дисторсии оптического элемента захватывающего устройства, которое является общим/объединенным единственным захватывающим устройством для поля зрения основного зеркала и поля зрения широкоугольного зеркала, можно обеспечить как относительно большой подлежащий отображению угол, который требуется для поля зрения широкоугольного зеркала коммерческого транспортного средства, так и достаточное разрешение, прежде всего в отношении поля зрения основного зеркала, и также в отношении глубины, то есть протяжения поля зрения основного зеркала в заднем направлении вдоль коммерческого транспортного средства.
То же справедливо, когда вместо поля зрения основного зеркала и поля зрения широкоугольного зеркала общей/объединенной системой оптического наблюдения и, прежде всего, единственным захватывающим устройством, одновременно захватываются поле зрения бордюрного зеркала и поле зрения зеркала обзора переднего бампера.
Согласно одному предпочтительному варианту осуществления, когда по меньшей мере два поля зрения вокруг транспортного средства визуально отображаются для водителя и захватываются одним и тем же захватывающим устройство, то есть одним и тем же оптическим элементом и одним и тем же датчиком изображения, первое поле зрения визуально отображается в первой области отображающего устройства, а второе поле зрения визуально отображается во второй области отображающего устройства, которая оптически отделена от первой области. Это оптическое разделение может выполняться, например, путем отображения первого и второго полей зрения, соответственно, в двух отдельных областях общего монитора, то есть общего устройства отображения, посредством способа разделенного экрана. Если, например, захватываются поля зрения основного зеркала и широкоугольного зеркала, то поле зрения основного зеркала может отображаться в первой области, а поле зрения широкоугольного зеркала может отображаться во второй области, расположенной ниже или выше первой части, причем, предпочтительно, обеспечивается постоянное разделение, например в виде полосы, или наложенных оптических разделений, например линии. То есть из захваченных данных блок обработки извлекает данные, которые должны быть отображены в первой области, и данные, которые должны быть отображены во второй области. Таким образом, для водителя транспортного средства является ясно распознаваемым, где отображается соответствующее поле зрения. Отображение полей зрения в первой и второй части на устройстве отображения в отношении вопроса, где отображается соответствующее поле зрения, предпочтительно, во время эксплуатации транспортного средства не изменяется.
Является предпочтительным, что блок обработки выполнен для разделения данных или извлечения данных, полученных от захватывающего устройства, в данные, которые должны отображаться в первой части устройства отображения, и данные, которые должны отображаться во второй части устройства отображения. Конечно, дополнительная обработка изображения может выполняться посредством блока обработки так, что, например, накладывается дополнительная информация, она указывает на опасность или в контексте всего поля зрения визуально отображается все время, она же увеличивается или уменьшается в соответствующей области, например в зависимости от направления движения и/или скорости.
В данном случае возможно, что данные для первой области и данные для второй области извлекаются из перекрывающихся площадей датчика изображения, то есть площадь на датчике изображения, из которой извлекается информация для первой области, и площадь датчика изображения, из которой извлекается информация для второй области, перекрываются, например, в горизонтальном направлении. После извлечения информации от датчика изображения, извлеченные области могут быть подвергнуты цифровому увеличения, если необходимо, с разными коэффициентами масштабирования.
Вместо отображения двух отдельных областей на устройстве отображения, два поля зрения могут быть отображены в единственное бесшовное смежное изображение на устройстве отображения (панорамный вид). Это возможно, поскольку подлежащие отображению данные захватываются посредством общего датчика изображения и, таким образом, для захвата двух полей зрения используется одна и та же оптика, так что нет необходимости объединять две разные имеющие разные дисторсии оптики в бесшовное изображение, что возможно только со значительными дополнительными затратами на регулировку и вычисления. Тем не менее, две области, по меньшей мере в направлении, которое является перпендикулярным их (виртуальному) интерфейсу, могут быть увеличены или уменьшены с разными коэффициентами масштабирования, то есть, например, с одним и тем же коэффициентом масштабирования в вертикальном направлении, но с разным коэффициентом масштабирования в горизонтальном направлении.
Предпочтительно, блок обработки выполнен для настройки в зависимости от захваченной датчиком и переданной блоком обработки информации, такой как, например, направление движения транспортного средства, информации для первой и/или второй области, которая извлечена из захваченных захватывающим устройством данных в отношении их положения в изображении, захваченном захватывающим устройством на датчике изображения. Если, например, поля зрения широкоугольного зеркала и основного зеркала коммерческого транспортного средства захвачены посредством захватывающего устройства, то, например, датчик направления движения, то есть регистрирующий угол поворота датчик, может обеспечить данные, которые заставят блок обработки отрегулировать область, из которой извлекается показываемая на устройстве отображения водителю транспортного средства информация. Например, при направления движения прямо вперед подлежащая отображению информация может быть обеспечена первой областью поверхности датчика изображения для поля зрения основного зеркала, в то время как при движении по кривой, то есть при повороте, эта информация может быть обеспечена на второй части поверхности датчика изображения. Следовательно, требуемая видимая область регулируется/обновляется без фактической регулировки захватывающего устройства. Кривая дисторсии с точкой перегиба в области поверхности датчика изображения делает возможным обеспечение наиболее возможной и адекватной резкости изображения даже в случае, когда извлеченная область смещается на датчике изображения. Конкретно, считываемая часть поверхности датчика изображения смещается так (так называемое панорамирование), что это позволяет водителю лучше видеть поля зрения и, благодаря кривой дисторсии захватывающего устройства, она может быть сдвинута так, что она может быть использована без существенной коррекции или обработки изображения. Поэтому механическая настройка захватывающего устройства больше не требуется.
Это может быть также использовано, если водитель транспортного средства хочет вручную отрегулировать реализованное системой управления видеокамерой виртуальное зеркало аналогично зеркалу.
В зависимости от требований единственный датчик транспортного средства может быть использован как датчик, или может быть использована комбинация по меньшей мере из двух датчиков транспортного средства, например функционально идентичных датчиков на разных бортах транспортного средства (например, колесные датчики), или разные датчики.
Также датчик, отличный от указывающего направления движения транспортного средства датчика, может вызывать/запускать смещение области извлеченной информации на поверхности датчика изображения.
Согласно одному предпочтительному варианту осуществления в системе замещения зеркал оптическая ось захватывающего устройства, прежде всего оптического элемента захватывающего устройства, ориентирована так, что она пересекает поле зрения или одно из полей зрения. Предпочтительно, если захваченные и отображенные поля зрения являются полями зрения основного зеркала и широкоугольного зеркала, оптическая ось пересекает поле зрения в плоской горизонтальной части дороги на пересечении, имеющем расстояние максимально 5 м от боковой граничной линии транспортного средства, причем боковая граничная линия является линией пересечения плоскости, параллельной центральной продольной плоскости транспортного средства, которая проходит через самую внешнюю или боковую самую внешнюю точку транспортного средства. Поэтому возможно, что прямой сегмент линии зрения, который проходит через эту точку пересечения и который органичен ограничением поля зрения основного зеркала, расположен в области кривой дисторсии, которая изогнута вправо, то есть в области, для которой вторая производства кривой дисторсии меньше 0 (r''=f''(α)<0). Предпочтительно, в данном случае точка перегиба кривой дисторсии расположена за этим сегментом линии прямого зрения. Поэтому по сравнению с обычными кривыми дисторсии возможно, что эта область перекрывает относительно большую площадь датчика изображения для угла α падающего светового луча и, таким образом, может быть отображена с высоким разрешением.
Согласно одному предпочтительному варианту осуществления система замещения зеркал выполнена для захвата посредством захватывающего устройства части транспортного средства и отображения его на отображающем устройстве видимым для водителя транспортного средства. Это позволяет водителю самому легко ориентироваться и, сверх того, прежде всего в коммерческих транспортных средствах, иметь хороший обзор пространственной ситуации коммерческого транспортного средства и возможных препятствий.
Факультативно или дополнительно к системе замещения зеркал, система оптического наблюдения может быть использована для продвинутой системы помощи водителю (ADAS). В данном случае можно оценивать захваченную информацию, например, в отношении другой информации об окружающей обстановке транспортного средства, например наличия линий разметки, дорожных знаков, других пользователей дороги и тому подобного и, например, направлять эту информацию к адаптивной системе круиз-контроля (АСС, ADR, STA), системе экстренного торможения (ABA), активной системе удержания в пределах полосы движения (LKA, LKAS), системе помощи при изменении полосы движения и тому подобному, которые являются частью или образуют систему помощи водителю (ADAS,) и обеспечивать посредством устройства управления соответствующую выходную информацию для других компонентов транспортного средства.
В одном особо предпочтительном варианте осуществления видеокамера направлена вперед, при взгляде в направлении движения вперед транспортного средства. Это особо важно для автоматического контроля дистанции и тому подобного. Дополнительно захваченная системой помощи водителю информация может быть выведена и/или отображена водителю или в контексте система замещения зеркал, или в контексте других систем помощи. Например, можно подавать соответствующий предупреждающий сигнал посредством звуковых сигналов, осязательных сигналов и тому подобного, например, вибрации рулевого колеса, водителю и предупреждать водителя, например, о возможной опасной ситуации.
Краткое описание чертежей
Ниже изобретение для примера описывается с помощью прилагаемых чертежей, на которых:
Фиг. 1 является схематическим видом системы замещения зеркал с использованием системы оптического наблюдения согласно изобретению,
Фиг. 2 является видом в перспективе коммерческого транспортного средства с системой оптического наблюдения согласно изобретению,
Фиг. 3 является упрощенным видом в разрезе основных компонентов системы оптического наблюдения,
Фиг. 4 является видом в перспективе основных компонентов системы оптического наблюдения в соответствии с фиг. 3,
Фиг. 5 демонстрирует схематический перспективный вид в разрезе варианта осуществления структуры оптического элемента захватывающего устройства системы оптического наблюдения,
Фиг. 6 является еще одним перспективным видом в разрезе подробной структуры оптического элемента захватывающего устройства системы оптического наблюдения,
Фиг. 7 показывает кривую дисторсии оптического элемента в системе координат α, r,
Фиг. 8 показывает первую производную кривой дисторсии оптического элемента захватывающего устройства захватывающей системы,
Фиг. 9 показывает вторую производную кривой дисторсии оптического элемента захватывающего устройства системы оптического наблюдения,
Фиг. 10А показывает кривую дисторсии оптического элемента захватывающего устройства системы оптического наблюдения по сравнению с обычными кривыми дисторсии,
Фиг. 10Б является частью фиг. 10А, показывающей кривые дисторсии вокруг начала кривой дисторсии,
Фиг. 11 является схематическим видом датчика изображения захватывающего устройства, где показаны поля зрения основного зеркала и широкоугольного зеркала согласно фиг. 2,
Фиг. 12 показывает подробности кривой дисторсии захватывающего устройства системы оптического наблюдения показанного на фиг. 11 варианта осуществления,
Фиг. 13 является схематическим видом сверху коммерческого транспортного средства, который схематически показывает движение области, которая должна отображаться в зависимости от условий движения транспортного средства, и
Фиг. 14 является схематическим видом поверхности датчика изображения захватывающего устройство системы оптического наблюдения, который иллюстрирует сдвиг/смещение представляющих интерес областей на поверхности датчика изображения согласно фиг. 13.
Описание предпочтительных вариантов осуществления
На фиг. 1 показан схематический вид системы 100 замещения зеркал, например, для коммерческого транспортного средства. Система 100 замещения зеркал может быть встроена в систему помощи водителю или может быть использована как отдельная система 100 замещения зеркал. Система 100 замещения зеркал содержит систему 130 оптического наблюдения, блок 120 обработки и устройство 110 отображения. Захваченные системой 130 оптического наблюдения данные изображения направляются к блоку 120 обработки, которое после подходящей обработки направляет эти данные изображения к устройству 110 отображения для из визуального отображения водителю транспортного средства. Кроме того, система 100 замещения зеркал может быть связана с одним или более датчиками 140 транспортного средства, которые также направляют к блоку 120 обработки данные, например текущее состояния движения (угол поворота, скорость движения, направление движения) транспортного средства, эти данные принимаются во внимание блоком 120 обработки при обработке полученных от системы 130 оптического наблюдения данных. Факультативно, датчик(-и) 140 транспортного средства могут быть напрямую связаны с системой 130 оптического наблюдения, так что система оптического наблюдения управляется непосредственно в зависимости от полученных датчиком(-ами) 140 данных. Поэтому также возможно, что блок 120 обработки выдает данные для управления системой 130 оптического наблюдения система 130 оптического наблюдения.
Блок 120 обработки может быть обеспечен как отдельный от системы 130 оптического наблюдения блок обработки, например в виде бортового компьютера транспортного средства, или, факультативно, он может быть встроен в систему 130 оптического наблюдения. Устройство 110 отображения является, например, установленным в транспортном средстве монитором, где собранные блоком 120 обработки данные визуально отображаются для водителя транспортного средства. Факультативно, вместо установленного в транспортном средстве монитора может быть обеспечено присоединенное снаружи транспортного средства устройство отображения, например в области обычных зеркал транспортного средства. Кроме того, устройство отображения может быть реализовано в виде проекции на элементе конструкции интерьера транспортного средства. В отношении устройства 110 отображения следует отметить, что, наряду с показанным вариантом осуществления, где для отображения поставляемых блоком 120 обработки данных предусмотрен монитор, устройство отображения могут образовывать несколько отдельных мониторов или устройств отображения. В зависимости от требований эти мониторы могут быть выполнены одинаково или отличаться друг от друга.
Кроме того, прежде всего, при использовании в контексте системы помощи водителю (ADAS), система 100 замещения зеркал и, прежде всего, ее блок 120 обработки, соединены при необходимости с дополнительными информационными или управляющими компонентами 150 транспортного средства, эти компоненты могут быть устройствами отображения для водителя, например звуковыми устройствами передачи сообщений или компонентами, которые непосредственно управляют транспортным средством, например усилителем рулевого управления.
Система 130 оптического наблюдения содержит по меньшей мере одно захватывающее устройство 30, которое будет подробно описано ниже. Однако она может содержать несколько захватывающих устройств 30 описанного выше типа. Кроме того, могут быть обеспечены дополнительные захватывающие устройства 31, которые не обязательно должны соответствовать требованиям, предъявляемым к захватывающим устройствам 30. Поэтому возможно, что блок 120 обработки, как показано на фиг. 1, непосредственно получает данные изображения соответственно от отдельных захватывающих устройств 30 и 31 вместо получения данных изображения от главной системы 130 оптического наблюдения. Соответственно, блок 120 обработки также может направлять сигналы управления к отдельным захватывающим устройствам 30, 31.
На фиг. 2 показан вид в перспективе коммерческого транспортного средства 10, которое оснащено системой 100 замещения зеркал согласно фиг. 1. Соответственно, одно или более захватывающих устройств 30 установлены на коммерческом транспортном средстве 10. Как показано на фиг. 2, представленная в качестве примера система 100 замещения зеркал, которая установлена на транспортном средстве, выполнена для захвата поля 11 зрения основного зеркала и поля 12 зрения широкоугольного зеркала посредством захватывающего устройства 30 и отображения их в кабине водителя транспортного средства 10 видимым для водителя коммерческого транспортного средства 10 образом. На фиг. 2 поле 11 зрения основного зеркала и поле 12 зрения широкоугольного зеркала схематически показаны штриховыми линиями (поле 11 зрения основного зеркала - длинными штрихами, поле 12 зрения широкоугольного зеркала - более короткими штрихами) на плоской поверхности дороги рядом с транспортным средством 10.
Кроме того, на фиг. 2 стрелкой D обозначено направление движения вперед. Все указанные в этом описании направления, то есть переднее, заднее, левое, правое и т.п., относятся к направлению D движения вперед транспортного средства.
Поле 11 зрения основного зеркала, которое показано на фиг. 2, простирается от боковой граничной линии 13 транспортного средства в боковом направления от транспортного средства и назад. Боковая граничная линия 13 является линией, определенной пересечением плоской горизонтальной дороги с плоскостью, параллельной центральной продольной линии (не показана) транспортного средства и проходящей, в боковом направлении, через самую дальнюю точку транспортного средства.
Оптическая ось 302 оптического элемента 301 (фиг. 3, 4) захватывающего устройства 30, которое, например, обеспечено оптической камерой, простирается в боковом направлении под углом относительно центральной продольной плоскости транспортного средства и поверхностью дороги так, что она пересекает поле 11 зрения основного зеркала на поверхности дороги. Это означает, что точка S пересечения или точка пересечения оптической оси 302 и поверхность дороги, в варианте осуществления на фиг. 2 находится в поле 11 зрения основного зеркала. Предпочтительно, точка S пересечения расположена максимально в 6 м за захватывающим устройством 30, при взгляде в продольном направлении транспортного средства, более предпочтительно в диапазоне 4-5 м.
Кроме того, на фиг. 2 тонкими точечными линиями показан сегмент 14 линии прямого зрения, этот сегмент прямого зрения определяется линейным сегментом линии, перпендикулярной боковой граничной линии 13 и проходящим через точку S пересечения оптической оси 302 и поверхности дороги, которая расположена в области поля 11 зрения основного зеркала.
В дальнейшем, захватывающее устройство 31 системы 130 оптического наблюдения описывается более подробно со ссылкой на фиг. 3 и 4, которые схематически показывают путь луча через схематически показанный соответственно в сечении и в перспективе (разрезанный) оптический элемент, а также посредством фигур 5 и 6, которые схематически показывают варианты осуществления структуры оптического элемента.
Оптический элемент 301 и датчик 302 изображения образуют главные компоненты устройства 30 захвата для системы оптического наблюдения для автомобиля. Как можно видеть на фиг. 3 и 4, в настоящем варианте осуществления оптический элемент 301 является по существу вращательно-симметричным вокруг оптической оси 302. Это означает, что любой луч света, падающий на захватывающее устройство 30 от подлежащей отображению при одинаковом угле, например α1, относительно оптической оси 302 точки объекта, отображается на поверхности 304 датчика изображения вращательно-симметрично вокруг оптической оси с одинаковой дисторсией. Угол α, в дальнейшем называемый также углом α объекта, соответствует углу, который является углом падения светового луча на оптический элемент 301, имеющий перпендикулярную к оптической оси 302 поверхность падения (фактически не показана). Соответственно, любой падающий под углом α1 объекта луч света отображается на поверхности 304 датчика изображения с расстоянием r1 от оптической оси 302. В данном случае поверхность 304 датчика изображения является поверхностью, которая фактически обеспечивается для отображения во всей апертуре изображения/угле раскрытия элемента 301, то есть поверхностью датчика 302 изображения, которая пригодна для отображения и которая обращена к оптическому элементу 301.
Фиг. 3 и 4 схематические показывают пути луча через оптический элемент 301 и их соответствующее отображение на поверхности 304 датчика изображения датчика 303 изображения на расстояниях r1, r2, …, rn для разных углов α1, α2, … αn. Поскольку в показанном варианте осуществления оптический элемент 301 является вращательно-симметричным, то расстояние r1, r2, …, rn и путь луча через оптический элемент 301 являются также вращательно-симметричными относительно оптической оси 302. Оптическая ось 302, для которой α=α0=0°, r=r0=0 проходит через поверхность 304 датчика изображения в начале (α=0; r=0) кривой дисторсии системы координат α, r.
Оптический элемент 301, который, как схематически показано на фиг. 5 и фиг. 6, состоит из системы линз и, при необходимости, дополнительных оптических компонентов и содержит несколько вращательно-симметричных линз, которые расположены в ряд одна за другой, имеет так называемую кривую r=f(α) дисторсии, которая является геометрической ошибкой формирования изображения оптического элемента, вызывающей локальное изменение в масштабе изображения. Вследствие вращательной симметрии оптического элемента 301 кривая r=f(α) дисторсии показанного на фиг. 3 и 4 варианта осуществления также является вращательно-симметричной относительно оптической оси 302.
Один вариант осуществления линзовой конструкции показан на фиг. 5. Здесь семь линз 314-320 расположены в ряд на пути падающего света (слева направо на фиг. 5). Линза 314 является сферической выпукло-вогнутой линзой, линза 315 является сферической выпукло-вогнутой линзой. Линза 316 образована сферической вогнуто-выпуклой линзой, линза 317 является линзой свободной формы (асферической линзой), имеющей выпукло-вогнутую поверхность и вогнутую поверхность, линза 318 является сферической двояковыпуклой линзой, линза 319 является асферической линзой, имеющей выпуклую поверхность и выпукло-вогнутую поверхность, и линза 320 является асферической линзой, имеющей вогнутую и выпукло-вогнутую поверхность. Поверхности свободной формы линз 317 и 320 также являются вращательно-симметричными, так что оптический элемент 301 варианта осуществления фиг. 5, который образован семью линзами, является вращательно-симметричным относительно оптической оси 302. В варианте осуществления фиг. 6 перед датчиком 303 изображения (см. вариант осуществления фиг. 6) может быть обеспечено защитное стекло 305 датчика и инфракрасный фильтр 329. Также в этом случае оптический элемент 301 имеет схематически показанный путь луча, а также имеющую точку перегиба в области 0<r<rmax кривую r=f(α) дисторсии.
В показанном на фиг. 6 факультативном варианте осуществления оптического элемента 301, оптический элемент 301 содержит восемь линз 306, 307, 308, 309, 310, 311, 312, 313, расположенных в ряд вдоль пути луча падающего света (слева направо на фиг. 6). В порядке, в котором падающий свет проходит линзы на его путем к датчику 303 изображения, линза 306 является сферической выпукло-вогнутой линзой, линза 307 является сферической выпукло-вогнутой линзой, линза 308 является сферической вогнуто-выпуклой линзой, линзы 309 и 310 являются, соответственно, сферическими двояковогнутыми линзами, линза 311 является сферической двояковогнутой линзой, линза 312 является линзой свободной формы (асферической линзой), имеющей вращательно-симметричную выпукло-вогнутую поверхность и выпуклую поверхность, и линза 313 является асферической вогнутой-сферической выпуклой линзой. Кроме того, в качестве дополнительных оптических компонентов перед датчиком 303 изображения обеспечены защитной стекло 305 датчика, а также инфракрасный фильтр 329. Посредством такой линзовой структуры падающий свет, как в качестве примера показано для некоторых лучей на фиг. 6, направляется через оптический элемент 301 и отклоняется оптическим элементом. Поэтому и благодаря соответствующей линзовой структуре оптический элемент как целое имеет кривую r=f(α) дисторсии, которая имеет точку перегиба в области 0<r<rmax поверхности 304 датчика изображения.
Как показанная на фиг. 5 оптическая система, так и показанная на фиг. 6 оптическая система в качестве дополнительного компонента содержит диафрагму 303. При необходимости могут быть обеспечены дополнительные фильтры, диафрагмы и т.п.Линзы могут быть выполнены, например, из стекла (особенно сферические линзы) или из синтетического материала. Где требуется, могут совместно использоваться разные материалы. Кроме того, линзы могут быть обеспечены, например, осажденным из паровой фазы металлическим покрытием или другим покрытием, которое обычно не влияет на преломление света, а служит только для оказания влияния на рассеяние, устранения нежелательных отражений и т.п.
Большинство показанных в вариантах осуществления на фиг. 5 и 6 линз 307-320 являются линзами, имеющими, по меньшей мере, частично сферическую поверхность. Однако, например, линзы 312, 317 и 320 являются так называемыми асферическими линзами, которые имеют по меньшей мере одну поверхность, которая не является частично сферической. Хотя на фиг. 5 и 6 не показано, путем выбора подходящих линз, которые не являются вращательно-симметричными относительно оптической оси 302, также можно выполнить оптический элемент 301 анаморфотным, так что оптический элемент имеет кривую дисторсии, которая не является вращательно-симметричной относительно оптической оси.
Посредством приведенной в качестве примера показанной на фиг. 5 и 6 линзовой структуры могут быть образованы вращательно-симметричные кривые r=f(α) дисторсии оптического элемента, которые являются функцией r=f(α), имеющей точку (αw; rw) перегиба на максимальном расстоянии rmax, которое является максимальным расстоянием точки поверхности 304 датчика изображения относительно оптической оси 302 на поверхности 304 датчика изображения. Для достижения точки перегиба в области 0<r(α)<rmax для кривой r=f(α) дисторсии, для αw, соответствующего радиусу rw на поверхности 304 датчика изображения, который меньше, чем rmax, должно применяться следующее: r''=f''(αw)=d2/dα2(α=αw)=0; r''=f''(α)<0 для 0<α<αw; r''=f''(α)>0 для αw<α<αmax. Такой тип кривой дисторсии, который может быть, например, достигнут посредством линзовой структуры оптического элемента согласно фиг. 5 и 6, схематически показан на фиг. 7. Ее первая производная показана на фиг. 8, а ее вторая производная показана на фиг. 9.
Как показано на фиг. 7, в системе координат α, r в области [0; rmax] присутствует точка (dw; rw) перегиба. Кроме того, при особом угле α=α2=αw объекта вторая производная (фиг. 9) кривой дисторсии равна нулю, то есть имеет пересечение нуля при αw. Как показано на фиг. 9, перед точкой перегиба, то есть в области 0°<α<αw, вторая производная кривой r=f(α) является отрицательной; для области αw<α<αmax вторая производная кривой дисторсии является положительной. Это означает, что, как можно увидеть на фиг. 7, кривая r(α) дисторсии изогнута вправо в первой области 0°<α<αw и изогнута влево во второй области αw<α<αmax.
Начало системы координат α, r на фиг. 7, то есть r=0 мм, α=0°, соответствует точке оптической оси 302 на датчике изображения. rmax является максимальным расстоянием, которое точка на датчике изображения может иметь от оптической оси 302. Если на прямоугольном датчике изображения оптическая ось является центральной, то есть расположена в центроиде, и прямоугольный датчик изображения имеет длину кромки b, то применимо уравнение  . Если оптическая ось не расположена на датчике изображения центрально, то расстояние rmax является расстоянием между оптической осью 302 на поверхности 304 датчика изображения до наиболее удаленного угла поверхности 304 датчика изображения.
. Если оптическая ось не расположена на датчике изображения центрально, то расстояние rmax является расстоянием между оптической осью 302 на поверхности 304 датчика изображения до наиболее удаленного угла поверхности 304 датчика изображения.
На фиг. 10А и 10Б также в системе координат α, r показана кривая r=f(α) для оптического элемента 301 захватывающего устройства 30 по сравнению с несколькими кривыми дисторсии согласно уровню техники. На фиг. 10Б показан увеличенный участок Z в области начала системы координат α, r. Имеющая точку (αw; rw) перегиба в области 0<α<αmax кривая r=f(α) дисторсии показана сплошной линией и обозначена через f1. f2 обозначает гномическую (без дисторсии) кривую дисторсии, f3 является стереографической кривой дисторсии, то есть конформной кривой дисторсии, f4 является эквидистантной кривой дисторсии, f5 является равноплощадной кривой дисторсии и f6 является ортографической кривой дисторсии. Фокусные расстояния с учетом кривых дисторсии выбраны так, что все кривые дисторсии проходят через точку (αw, rw).
Как можно увидеть на фиг. 10А и 10Б, кривая f1 дисторсии имеет точку (αw; rw) перегиба, где кривизна кривой дисторсии изменяется от изогнутой вправо (в области 0<α<αw) до изогнутой влево (в области αw<α<αmax). Кроме того, как можно увидеть, прежде всего, на фиг. 10Б, градиент кривой f1 дисторсии в области вблизи начала системы координат α, r больше, прежде всего, по сравнению с другими кривыми дисторсии. Это означает, что на датчике 303 изображения обеспечивается относительно большое пространство для отображения относительно малого угла, результатом чего является то, что площадь в этой области может быть отображена с высоким разрешением. Кроме того, градиент дисторсии кривой r=f1(α) дисторсии в точке (αw; rw)перегиба минимален, то есть в самой точке перегиба и в ее непосредственной близости присутствует сравнительно низкий градиент. Наконец, для αmax градиент кривой дисторсии, предпочтительно, является максимальным или относительно большим, что, прежде всего, можно увидеть из изображения на фиг. 10А.
Показанная на фиг. 7-10Б кривая дисторсии описывается, например, полиномиальной функцией  . Факультативно, кривую дисторсии может описывать сплайн-функция, причем эта сплайн-функция является частично полиномиальной функцией, то есть функцией, состоящей из нескольких полиномных кусков/блоков кривой Безье, которая является математически сформулированной кривой (сгенерированной численно кривой).
. Факультативно, кривую дисторсии может описывать сплайн-функция, причем эта сплайн-функция является частично полиномиальной функцией, то есть функцией, состоящей из нескольких полиномных кусков/блоков кривой Безье, которая является математически сформулированной кривой (сгенерированной численно кривой).
Со ссылкой на фиг. 11 и фиг. 12 разъясняется отображение на поверхности 304 датчика изображения полей зрения 11, 12 для коммерческого транспортного средства 10 (фиг. 2), которые захвачены посредством системы 130 оптического наблюдения. Показанная на фиг. 11 поверхность 304 датчика изображения датчика 303 изображения является прямоугольной с длинами сторон а и b. Как можно увидеть на фиг. 11, в показанном варианте осуществления оптическая ось 302 расположена эксцентрично относительно поверхности 304 датчика изображения, то есть за центроидом поверхности 304 датчика изображения. В особенности, оптическая ось 302 является эксцентричной относительно стороны поверхности 304 прямоугольного датчика изображения. Это приводит к максимальному расстоянию r3=rmax от оптической оси 302 на поверхности 304 датчика изображения до самым дальним углам поверхности 304 датчика изображения. Кроме того, в соответствии фиг. 10А и 10Б показаны те имеющие в качестве центра оптическую ось 302 радиусы, которые проходят через точку (r2=rw) перегиба кривой r=f(α) дисторсии, радиус rSB, соответствующий максимальному расстоянию от оптической оси 302 до параллельной боковой линии а кромки поверхности датчика; радиус rSH, соответствующий максимальному расстоянию от оптической оси 302 на поверхности 304 датчика до параллельной кромке b датчика кромки поверхности датчика; а также радиус r1 который соответствует показанному первому радиусу r1 при угле α1, как показано на фиг. 10А и 10Б. Кроме того, на фиг. 11 показаны отображенное изображения 11' поля 11 зрения основного зеркала (см. фиг. 2), а также отображенное изображение 12' поля 12 зрения широкоугольного зеркала (см. фиг. 2), а также отображенное изображение 15' горизонтальной линии. Как можно увидеть, особенно отображенное изображения 11' поля 11 зрения основного зеркала расположено в значительной степени в пределах радиуса r1, так что это область в пределах радиуса r1 отображается с повышенным разрешением по сравнению с обычными кривыми дисторсии согласно уровню техники. Кроме того, все отображенное изображение 12' поля 12 зрения широкоугольного зеркала может быть отображено на том же датчике тем же оптическим элементом. Нет необходимости в обеспечении второго оптического элемента и/или второго датчика изображения и последующем объединении изображений для отображения.
Кроме того, на фиг. 11 показано отображенное изображение 14' сегмента 14 линии прямого зрения (см. фиг. 2). Как можно увидеть на фиг. 11, этот сегмент линии по существу простирается параллельно боковой кромке поверхности 304 датчика изображения (боковая кромка а).
На фиг. 12 это отображенное изображение 14' сегмента линии прямого зрения в дополнение к отображенному изображению кривой r=f1(α) дисторсии также представлено в системе координат α, r. Ясно видно, что вся ширина отображенного изображения поля 11 зрения основного зеркала находится в области 0<α<αw, которая находится в области кривой r=f(α) дисторсии, которая изогнута вправо и, таким образом, обеспечивает высокое разрешение (особенно при сравнении с кривыми дисторсии обычных оптических систем).
В описываемом сейчас варианте осуществления, где система 130 оптического наблюдения используется в системе 100 замещения зеркал транспортного средства, блок 120 обработки системы 100 замещения зеркал может затем оценивать захваченные датчиком 303 изображения данные изображения и отображать их, например, на мониторе, расположенным видимым для водителя образом, например, в кабине водителя коммерческого транспортного средства. В настоящем варианте осуществления отдельные области считываются для поля 11 зрения основного зеркала и поля 12 зрения широкоугольного зеркала и, в одном предпочтительном варианте осуществления (не показан), отображаются для водителя в отдельных областях устройства 110 отображения. Отдельные области могут быть обеспечены на общем мониторе или отдельных мониторах. Поэтому можно моделировать обычный внешний вид основного зеркала и широкоугольного зеркала для водителя коммерческого транспортного средства. Если система 130 оптического наблюдения используется, например, в контексте системы помощь водителю, то представляющие интерес области поверхности 304 датчика изображения могут также оцениваться блоком обработки с учетом специфической информации об окружающей среде (например, полос дороги, дорожных знаков, других пользователей дороги и т.д.), и в зависимости от захваченной и определенной информации может происходить вмешательство в систему управления движением, водителю может отображаться предостережение или информация и т.д.
В описанной выше системе 100 замещения зеркал дополнительно можно в зависимости от условий движения транспортного средства, например коммерческого транспортного средства 10, извлекать подлежащие отображению водителю на устройстве 100 отображения данные из разных областей поверхности 304 датчика изображения, то есть оценивать разные части поверхности 304 датчика изобретения в разные моменты времени во время движения. Это в качестве примера описано со ссылкой на фиг. 13 и 14.
На фиг. 13 показан вид сверху коммерческого транспортного средства во время направления движения вперед или направления движения прямо вперед, причем схематически показаны поле 11 зрения основного зеркала и поле 12 зрения широкоугольного зеркала. На фиг. 14 показана, также для направления движения прямо вперед, поверхность 304 датчика изображения с отображенным изображением 11' поля 11 зрения и отображенное изображение 12' поля 12 зрения. Как уже разъяснено выше, во время нормального направления движения прямо вперед область 21' для показа/отображения поля 11 зрения основного зеркала и для обеспечения водителя видом поля 11 зрения основного зеркала, соответственно, извлекается из данных в особой первой части поверхности 304 датчика изображения. Если ситуация при движения изменяется, то может случиться так, что в то время как ориентация захватывающего устройства 30 на транспортном средстве не изменяется, представляющая интерес область смещается от исходной представляющей интерес области 21 к смещенной/сдвинутой области 22. Это может иметь место, когда транспортное средство, прежде всего коммерческое транспортное средство с трейлером, движется вдоль кривой или выполняет процесс маневрирования. В этом случае представляющая интерес область, которая соответствует полю 11 зрения основного зеркала, как показано на фиг. 13, сдвигается к области 22. Посредством системы 130 оптического наблюдения, содержащей захватывающе устройство 30, которое включает в себя оптический элемент 301, который имеет кривую r=f(α) дисторсии вышеописанного типа, можно также сдвинуть область на поверхности 304 датчика изображения, из которой извлекаются данные датчика так, что, как показано на фиг. 14, извлекаются данные изображения области 22' на поверхности 304 датчика изображения. Это возможно без потери требуемой точности данных изображения, то есть, прежде всего, разрешения, поскольку кривая r=f(α) может обеспечивать требуемое разрешения и дисторсию во всех областях, из которым могут быть извлечены данные, без требования постобработки данных. Таким образом, поле 11 зрения и, соответственно, его отображенное изображение 11' могут быть обновлены в соответствии с дорожной ситуацией. Механическая регулировка захватывающего устройство 30 не требуется. Напротив, регулировка может выполняться исключительно путем извлечения данных изображения датчика 304 изображения в выбранных областях.
Эти преимущества достигнуты за счет использования по меньшей мере одного захватывающего устройства 30, содержащего оптический элемент 301, имеющий кривую r=f(α) дисторсии, которая имеет точку перегиба на максимальном расстоянии точки на поверхности 304 датчика изображения от оптической оси 302 на поверхности 304 датчика изображения.
Явно указано, что все раскрытые в описании и/или пунктах формулы изобретения признаки следует понимать подлежащими раскрытию для целей исходного раскрытия отдельно и независимо друг от друга, а также для целей ограничения заявленного изобретения независимо от состава признаков в вариантах осуществления и/или пунктах формулы изобретения.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
10 коммерческое транспортное средство
11 поле зрения основного зеркала
12 поле зрения широкоугольного зеркала
13 боковая граничная линия
14 сегмент линии прямого зрения
11' (отображенное) изображение поля 11 зрения
12' (отображенное) изображение поля 12 зрения
14' (отображенное) изображение сегмента 14 линии прямого зрения
15' (отображенное) изображение лини горизонта
21' извлеченная часть
22' извлеченная часть
30 захватывающее устройство
31 захватывающее устройство
301 оптический элемент
302 оптическая ось
303 датчик изображения
304 поверхность датчика изображения
305 защитное стекло датчика
306 линза
307 линза
308 линза
309 линза
310 линза
311 линза
312 линза
313 линза
314 линза
315 линза
316 линза
317 линза
318 линза
319 линза
320 линза
329 инфракрасный фильтр
330 диафрагма
100 система замещения зеркал
110 устройство отображения
120 блок обработки
130 система оптического наблюдения
140 датчик транспортного средства
150 устройство управления
f кривая дисторсии
f1 кривая дисторсии
f2 кривая дисторсии (без дисторсии, гномоническая)
f3 кривая дисторсии (конформная, стереографическая)
f4 кривая дисторсии (эквидистантная)
f5 кривая дисторсии (равноплощадная, ортографическая)
f6 кривая дисторсии (ортографическая)
fβi кривая дисторсии
а боковая кромка поверхности датчика изображения
b боковая кромка поверхности датчика изображения
D направление движения вперед транспортного средства
S точка пересечения
α угол объекта падающего света
β угол поворота вокруг оптической оси
r расстояние от точки на поверхности датчика изображения до оптической оси
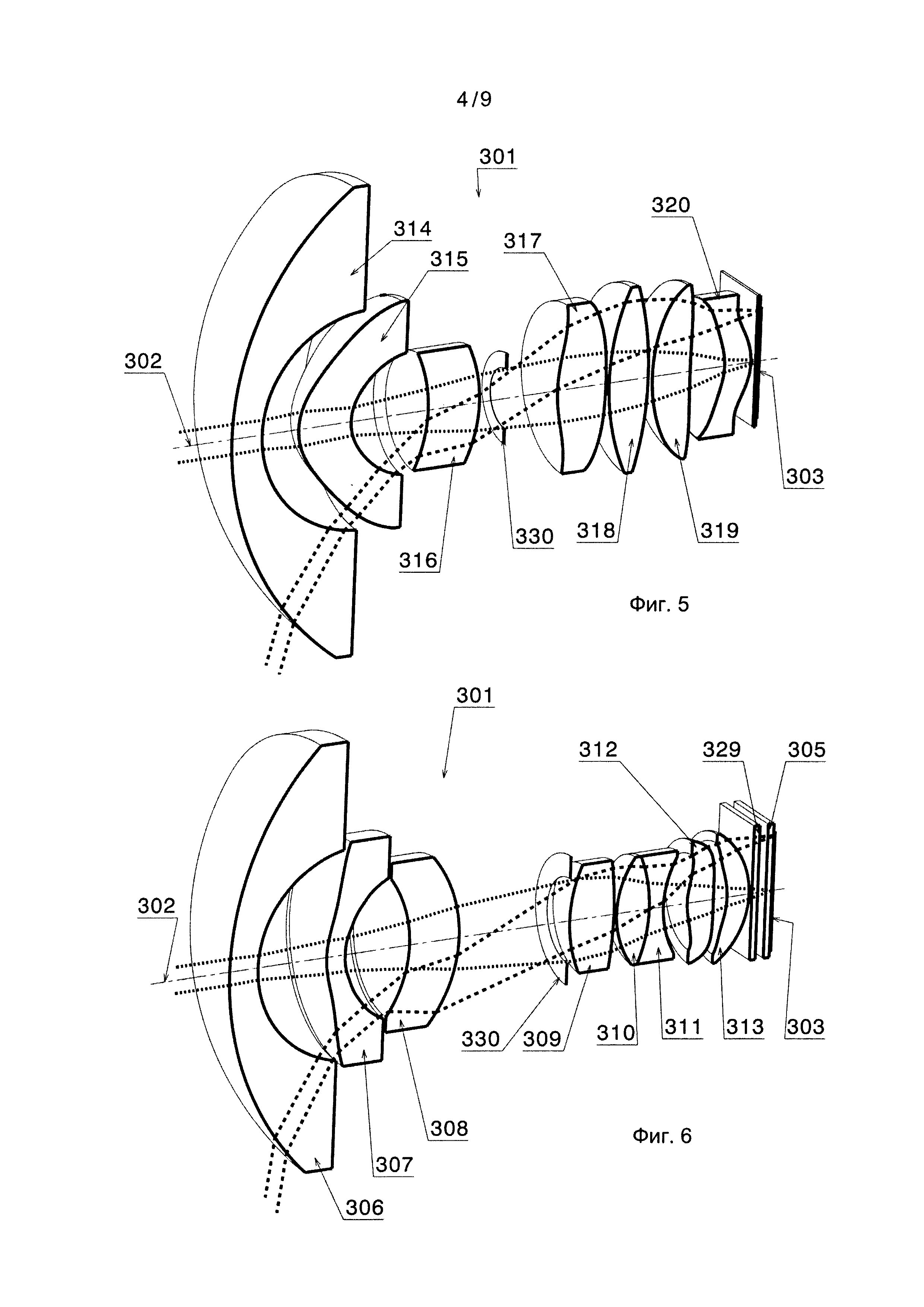
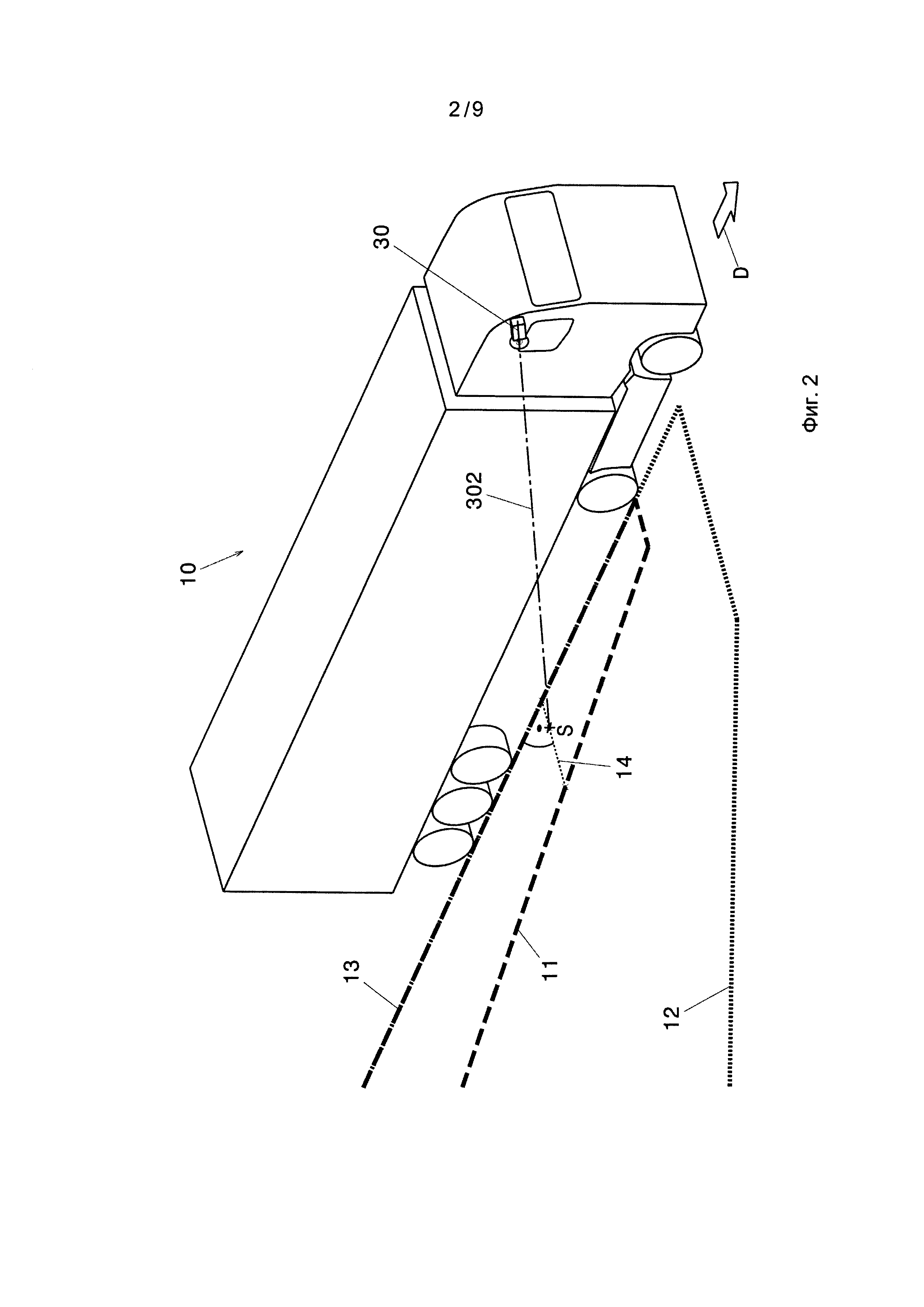
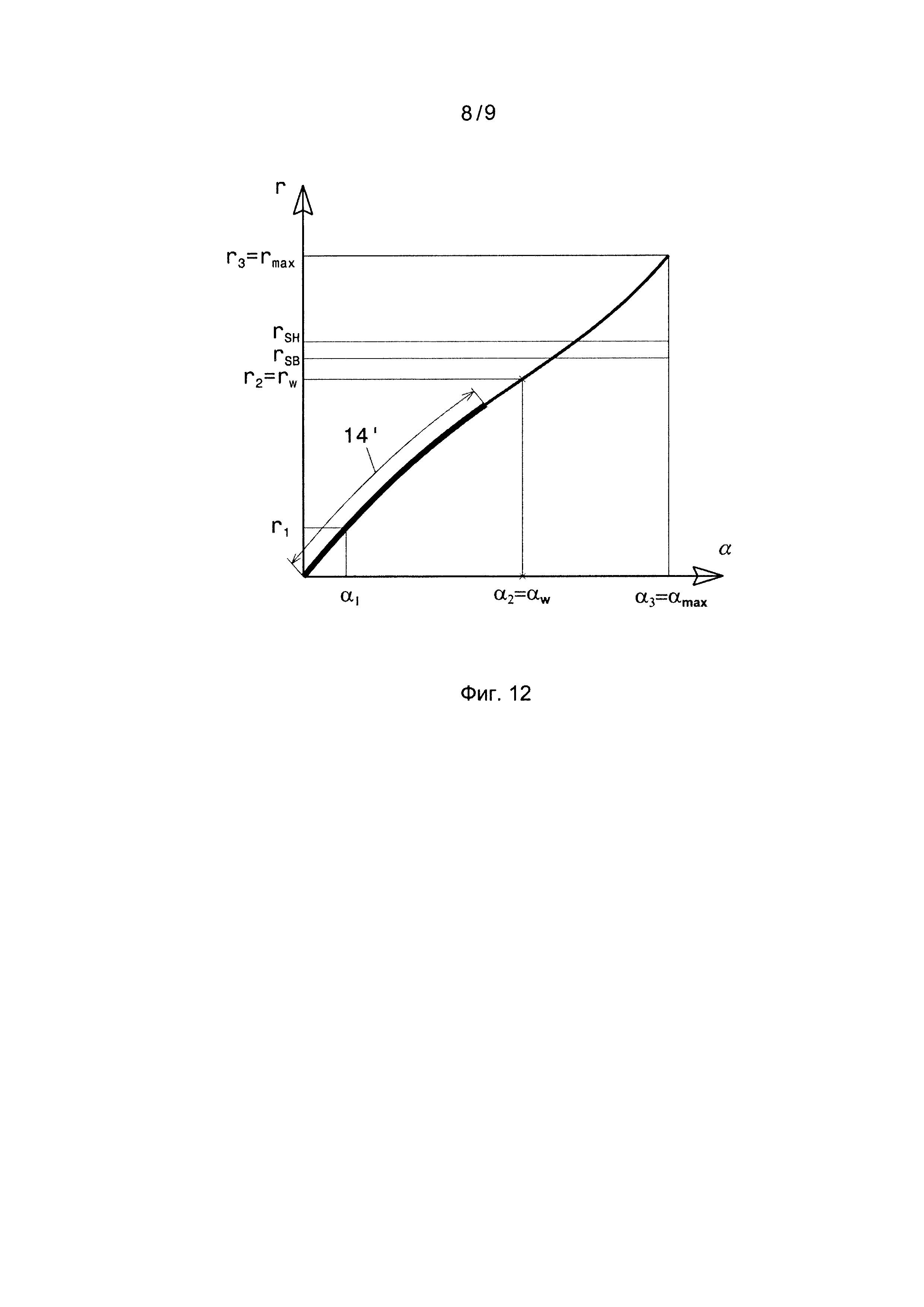
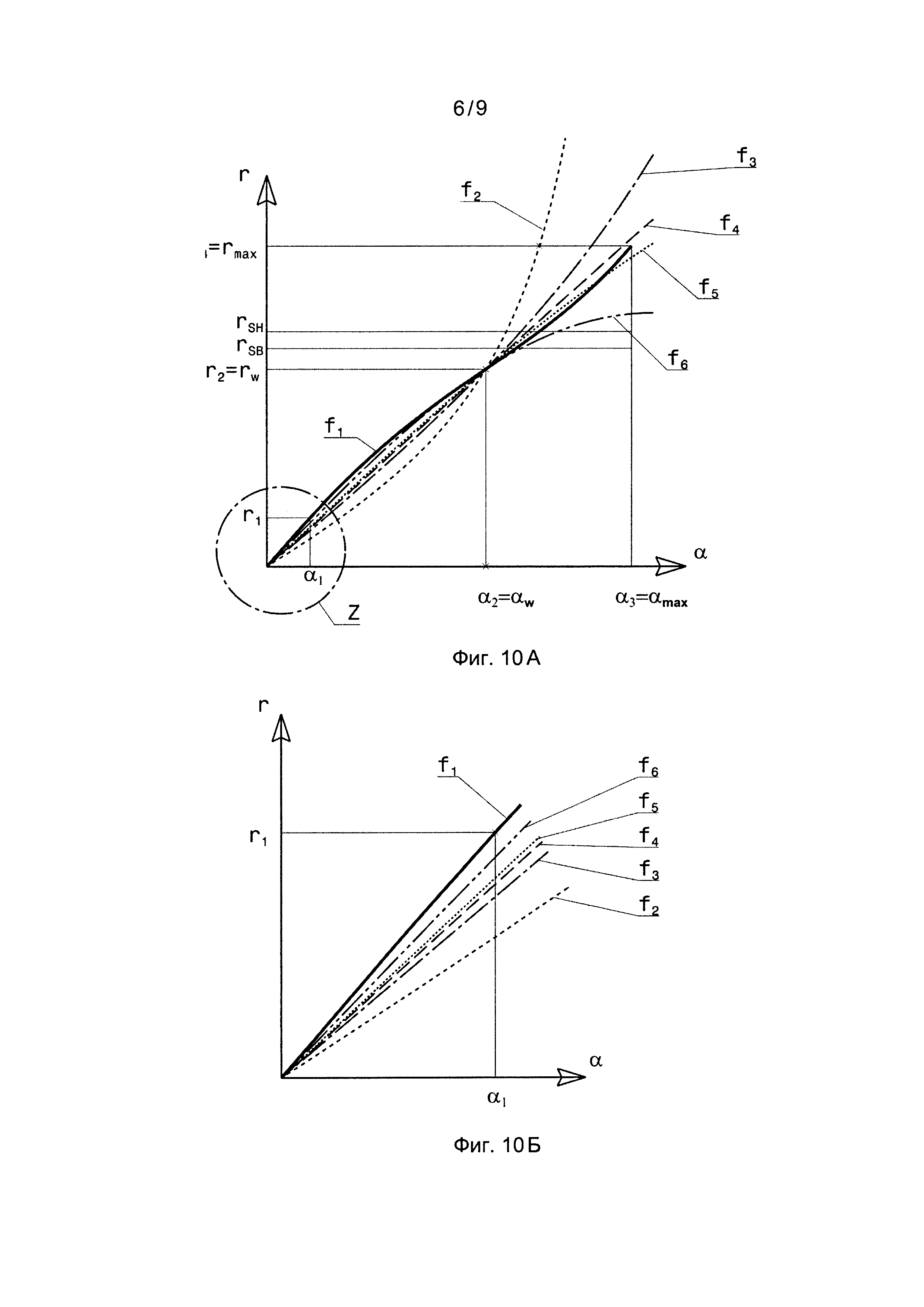
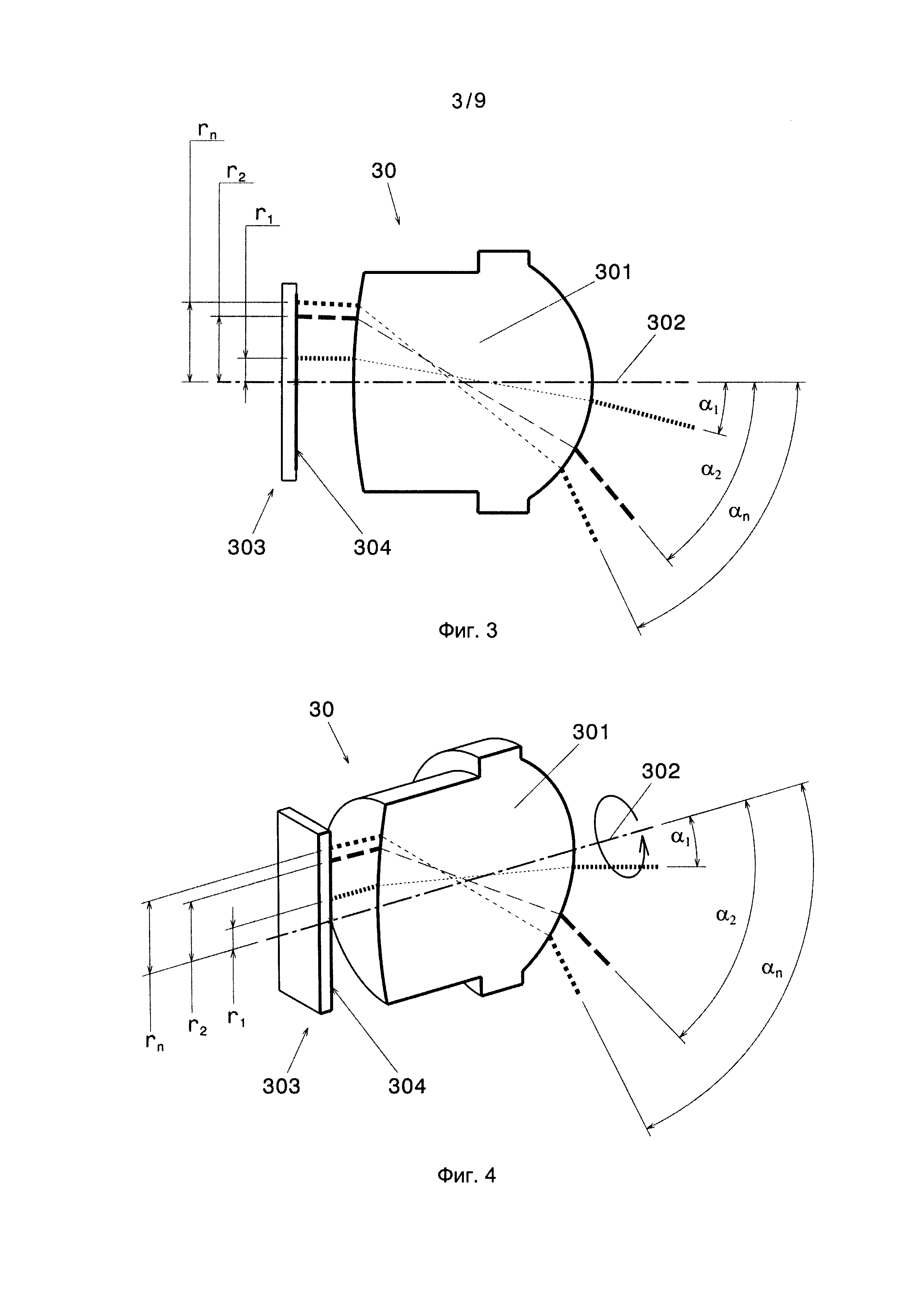
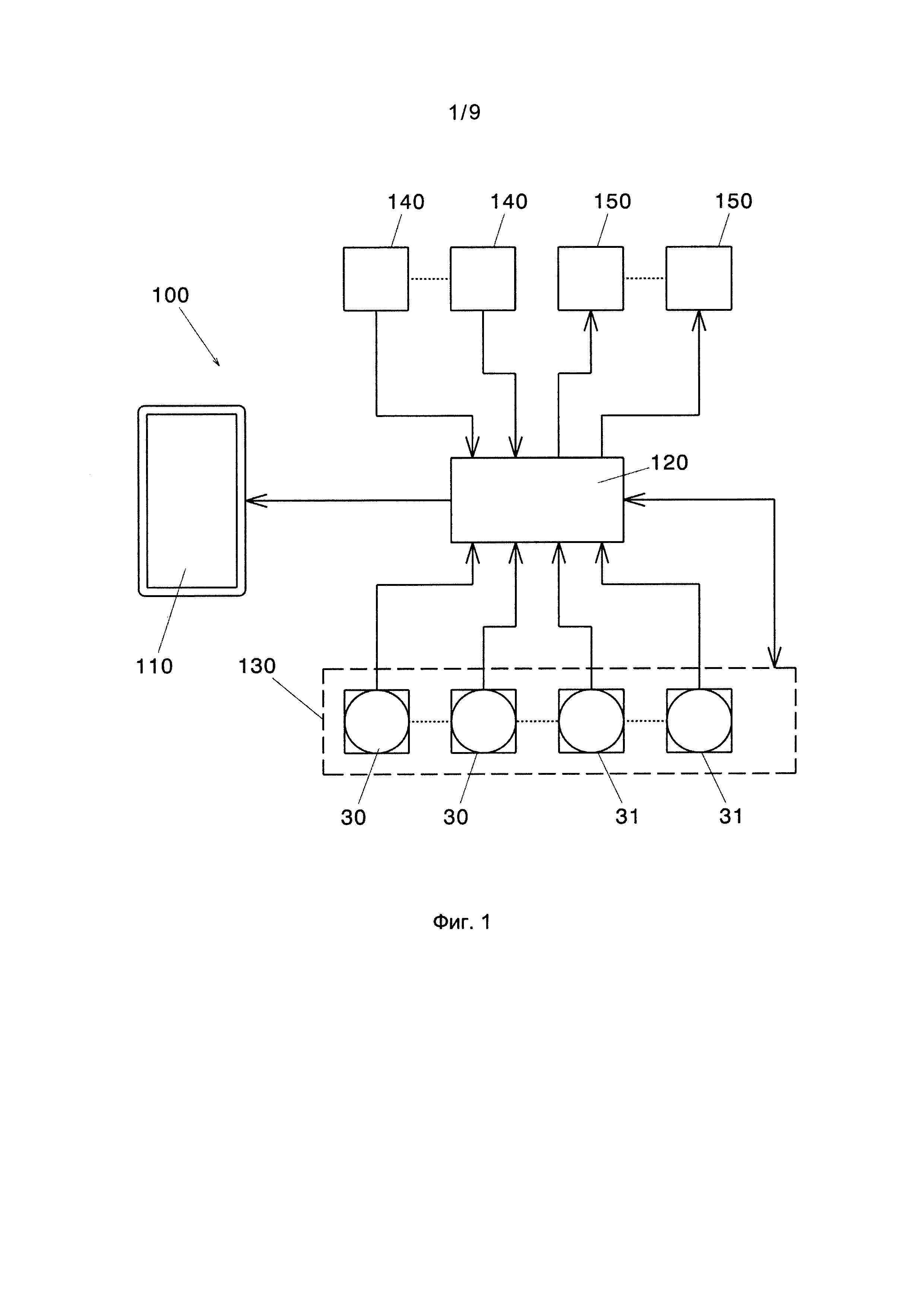
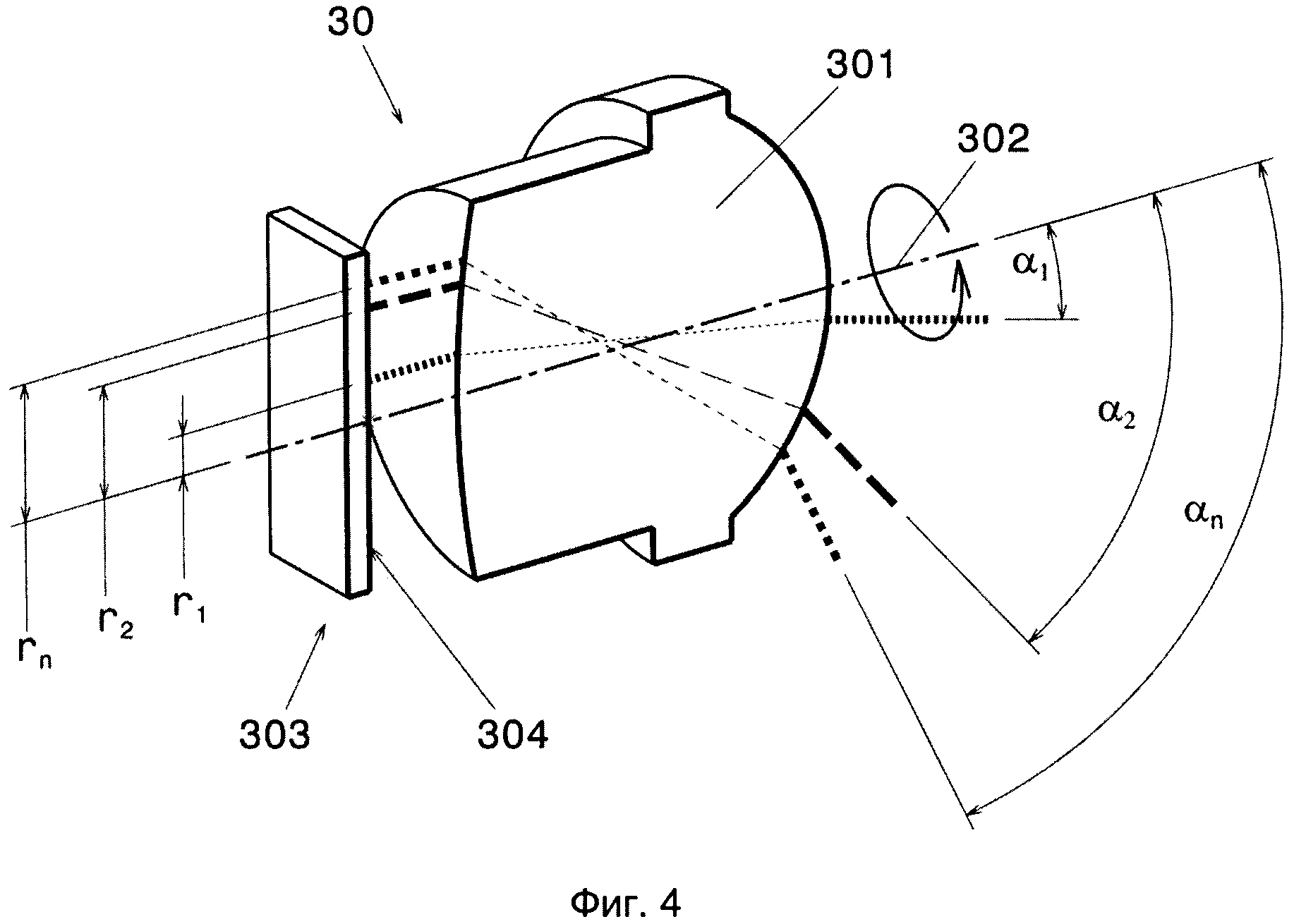
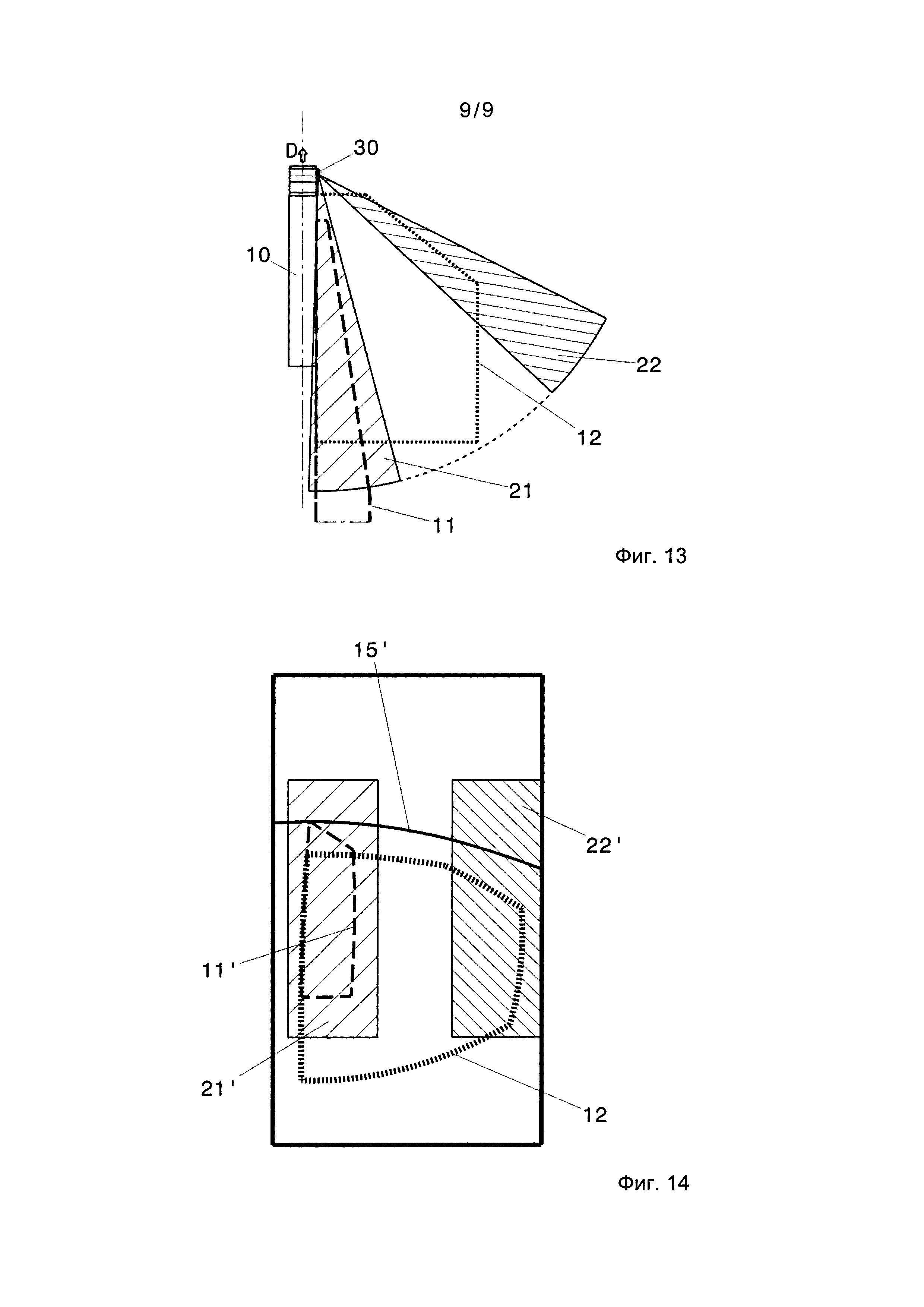
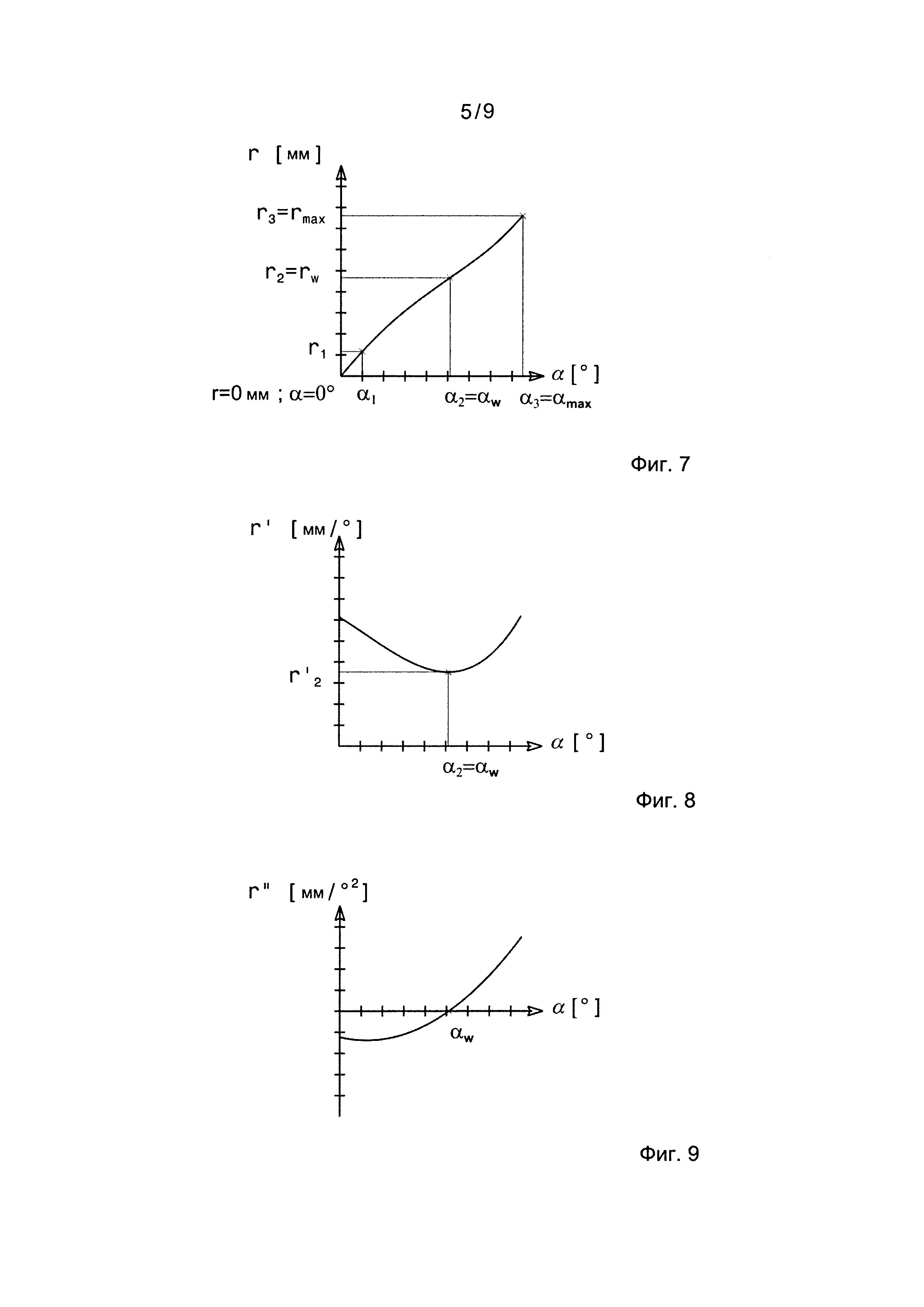
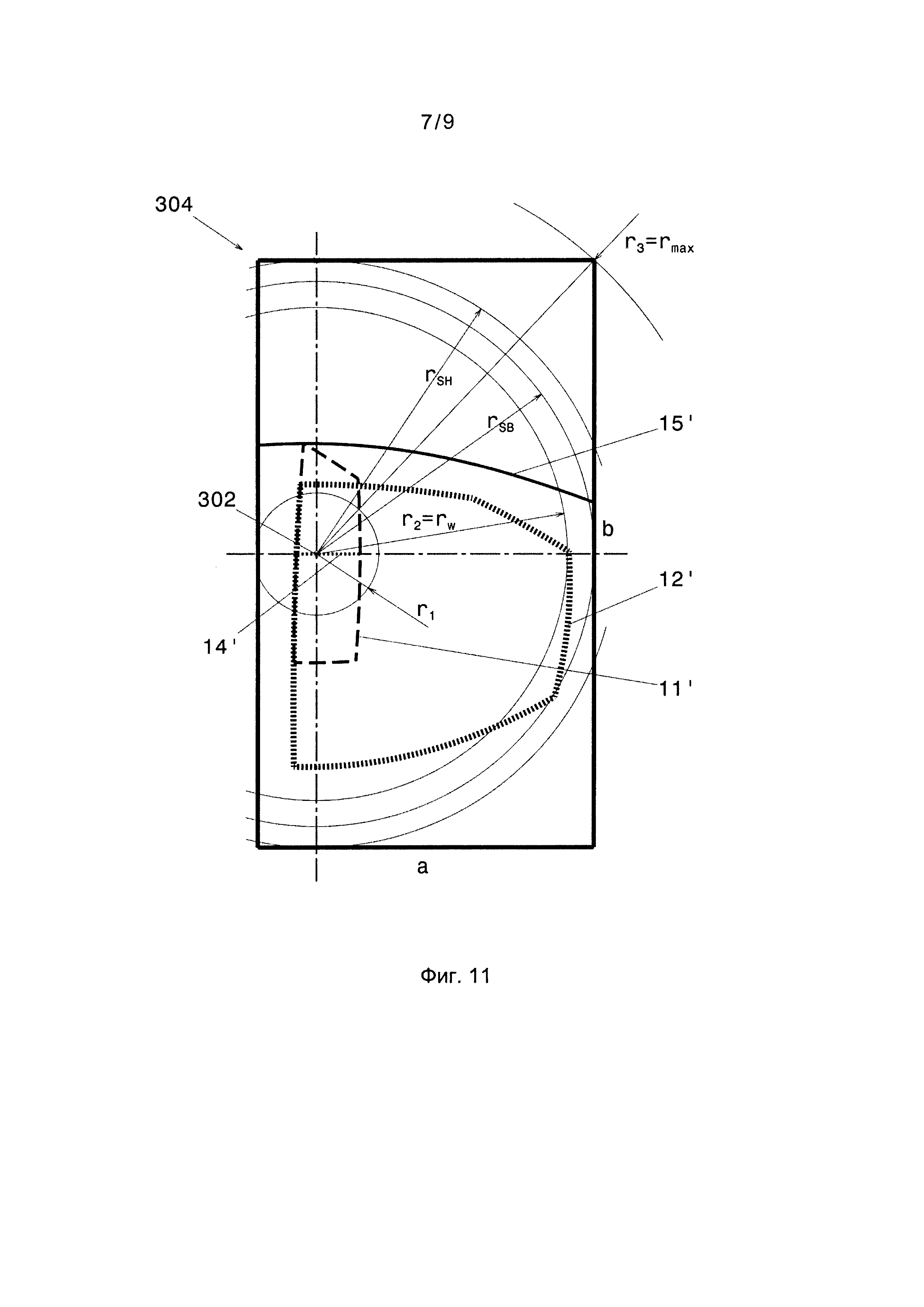
Электрически вращательный регулирующий блок, в частности, для непрямых визуальных систем для транспортных средств
Система визуального отображения и оснащенное ею транспортное средство
Система съёмочной камеры c модульным расположением печатных плат
Система визуализации для транспортных средств
Система замещения зеркал для транспортного средства
Опорный узел, имеющий крепежное устройство, и крепежная часть для транспортных средств, содержащая такое крепежное устройство
Шаровое шарнирное устройство, крепежное устройство и система непрямого наблюдения для транспортного средства
Внешнее оптическое устройство, регулируемое по длине
Автоматически переключающийся сцепляющий механизм для средства регулировки наружного зеркала автомобильного транспортного средства
Оптическое устройство, в частности, для внешнего зеркала транспортного средства
Электрически вращательный регулирующий блок, в частности, для непрямых визуальных систем для транспортных средств
Система визуального отображения и оснащенное ею транспортное средство
Система съёмочной камеры c модульным расположением печатных плат
Система визуализации для транспортных средств
Система и способ видеозахвата задней части транспортного средства
Система замещения зеркал для транспортного средства
Шаровое шарнирное устройство, крепежное устройство и система непрямого наблюдения для транспортного средства

