Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ВИДЕОЗАХВАТА ЗАДНЕЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Изобретение относится к системе и способу видеозахвата задней части транспортного средства, прежде всего коммерческого транспортного средства, имеющего полуприцеп, прицеп или любой другой простирающийся назад сегмент, который выполнен с возможностью поворота относительно кабины водителя, и изображение задней части которого должно быть захвачено.
В транспортных средствах с прицепами используют обычные системы зеркал для транспортного средства и системы замены зеркал на основе камер, соответственно, с целью обеспечения для водителя транспортного средства возможности в достаточной мере отслеживать окружение транспортного средства в любое время, также и в случае отличной ориентации прицепа относительно транспортного средства, то есть, под различными углами продольной оси транспортного средства относительно продольной оси прицепа.
В транспортных средствах с прицепами, прежде всего, задняя часть прицепа должна быть показана водителю транспортного средства для помощи водителю, например, во время процессов маневрирования и езды по кривым, поскольку прицеп поворачивается относительно кабины водителя в этих ситуациях вождения.
В смысле настоящей идеи изобретения термин «прицеп» включает в себя прицепы, соединяемые с транспортным средством (тягачом) посредством жесткой сцепки, например полуприцепы (так называемые прицепы), которые располагаются в заднем пониженном сегменте тягача, и тем самым присоединяются поворотным образом, по меньшей мере, вокруг вертикальной оси. В общих чертах, прицеп является простирающимся назад сегментом, расположенным позади кабины водителя транспортного средства и имеющим боковую (шарнирную) подвижность относительно кабины водителя, причем при езде по кривым сегмент поворачивается вокруг вертикальной оси.
DE 102013214368 А1 описывает использование модуля видеозахвата изображения и модуля отображения изображения, служащих в качестве системы замены зеркал для отслеживания и отображения бокового и/или заднего окружения транспортного средства. Однако недостатком этого типа модуля видеозахвата изображения и модуля отображения изображения является то, что изображение, захваченное модулем видеозахвата изображения, должно быть приспособлено путем подходящего выбора соответствующей секции изображения, изменения масштаба изображения и/или изменения разрешения изображения таким образом, что изображение окружения транспортного средства, показываемое на отображаемом сегменте изображения, предпочтительно, является не заслоненным или только в малой степени заслоненным прицепом транспортного средства.
Одним из недостатков в использовании устройства распознавания изображения является то, что различные контуры прицепа (например, рамного тентованного прицепа, низкой автомобильной платформы, прицепов для сыпучих грузов и т.д.) или плохо различимые контуры (например, ночью, по цвету, в тумане, в снегу и т.д.) усложняют распознавание.
Целью изобретения является обеспечение для транспортного средства с прицепом системы и способа, посредством которых положение задней части прицепа может быть надежно определено с целью обеспечения того, что задний сегмент прицепа может быть показан водителю в зависимости от соответствующей ситуации вождения в любое время.
Прежде всего, целью изобретения является надлежащая поддержка визуальной системы для транспортного средства с прицепом, в которой улучшено использование заданной ограниченной поверхности дисплея модуля отображения для показа сегментов изображения, важных для соответствующей ситуации вождения, в зависимости от ситуации вождения, например при езде по кривым или в процессе маневров по повороту, когда прицеп поворачивается в стороны относительно транспортного средства.
Вышеупомянутые цели достигнуты системой, содержащей признаки по п. 1 формулы изобретения, и способом, содержащим признаки по п. 14 формулы изобретения.
Другие предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения.
Система согласно изобретению для транспортного средства, имеющего кабину водителя и простирающийся назад сегмент, который выполнен с возможностью поворота относительно кабины водителя, служит для видеозахвата задней части простирающегося назад сегмента, и содержит по меньшей мере два колесных датчика, расположенные на противоположных концах оси простирающегося назад сегмента, на которой монтируются колеса. Колесные датчики, прежде всего, получают информацию о вращательном перемещении колес. Кроме того, система согласно изобретению содержит управляющий модуль, соединенный с колесными датчиками, который определяет положение задней части простирающегося назад сегмента на основании полученной информации о вращательном перемещении колес.
При помощи колесных датчиков является возможной помощь для уже существующей обзорной системы, используемой для определения (положения) задней части прицепа, таким образом, что положение задней части прицепа может быть надежно определено даже в случае плохой ситуации с обзором, такой как дождь, снег, туман и т.д. Определенное положение задней части прицепа может, например, использоваться для регулирования (оптимизации) отображения задней части прицепа на устройстве слежения, имеющем ограниченную область отображения.
В предпочтительном варианте осуществления системы управляющий модуль на основании полученной информации о вращательном перемещении колес определяет угол поворота и/или направление поворота кабины водителя относительно простирающегося назад сегмента.
В другом предпочтительном варианте управляющий модуль на основании полученной информации о вращательном перемещении колес определяет дугу окружности, по которой перемещается транспортное средство, причем информация о вращательном перемещении, предпочтительно, включает в себя информацию о скорости вращения и/или направлении вращения колес.
В другом предпочтительном варианте осуществления система содержит два или более колесных датчика, соответственно расположенные на противоположных концах оси, на которой монтируются колеса, вращательное перемещение которых должно быть получено. Предпочтительно, колесный датчик присоединен к ступице колеса оси.
В другом предпочтительном варианте осуществления изобретения управляющий модуль является устройством управления антиблокировочной тормозной системы (ABS) или устройством управления тормозной системы с электронным управлением (EBS), которое обычно уже является смонтированным на обычном транспортном средстве. Посредством интеграции с существующей антиблокировочной тормозной системой является, например, возможным совместное использование синергетических аспектов (электроснабжение, датчики, размещение и т.д.) и сокращение затрат. В данном случае, уже существующие датчики этих устройств управления могут использоваться для сбора информации о вращательном перемещении колес, дополнительно или в качестве альтернативы вышеупомянутым колесным датчикам.
В другом предпочтительном варианте осуществления системы согласно изобретению система содержит систему для непрямого обзора, например систему замены зеркал и/или зеркальную систему для обеспечения поля зрения, расположенного вне кабины водителя, причем поле зрения, предпочтительно, простирается по бокам назад от кабины водителя и включает в себя, по меньшей мере, часть боковой стороны транспортного средства и простирающегося назад сегмента. В данном случае, управляющий модуль управляет системой для непрямого обзора на основании полученной информации о вращательном перемещении колес для адаптации (регулировки) поля зрения таким образом, что задняя часть простирающегося назад сегмента всегда расположена в пределах поля зрения. Этим обеспечивается, что в зависимости от ситуации вождения (вождение по кривым, маневры по повороту, езда задним ходом, процессы маневрирования и т.д.), относящаяся к делу задняя часть простирающегося назад сегмента (прицепа) транспортного средства в любое время отображается для водителя. Предпочтительно, отображение задней части является по существу, соответственно, неискаженным и несжатым.
В другом предпочтительном варианте осуществления системы согласно изобретению посредством приспосабливания или изменения поля зрения обеспечивается, что задняя часть всегда расположена в пределах поля зрения путем соответствующего смещения и/или расширения поля зрения.
В другом предпочтительном варианте осуществления системы согласно изобретению информация, включающая в себя геометрию транспортного средства, угол поворота рулевого колеса, скорость транспортного средства и/или дополнительные сигналы от транспортного средства, используется в дополнение к информации о вращательном перемещении колес с целью поддержки в определении положения задней части. В предпочтительном варианте изобретения геометрия транспортного средства может быть получена посредством смонтированной на транспортном средстве системы распознавания изображения, причем система, предпочтительно, основана на использовании ультразвука. Геометрия транспортного средства может также быть получена заранее, и заранее постоянно сохранена в системе. Например, следующие виды информации (данных) могут быть заранее сохранены в памяти: число осей, число прицепов (простирающихся назад сегментов), число осей для каждого прицепа, величины длины и ширины, соответственно, прицепа и транспортного средства, центр поворота прицепа, положения верхнего и нижнего краев прицепа и/или транспортного средства и т.д.
Предлагаемый способ для транспортного средства, имеющего кабину водителя и простирающийся назад сегмент, который выполнен с возможностью поворота относительно кабины водителя, определяет положение задней части простирающегося назад сегмента путем получения первой информации о вращательном перемещении первого колеса простирающегося назад сегмента и путем получения второй информации о вращательном перемещении второго колеса простирающегося назад сегмента, причем первое колесо и второе колесо размещены друг напротив друга на той же оси, путем вычисления различия между первой и второй информацией о вращательном перемещении, и путем определения положения задней части простирающегося назад сегмента на основании различия между первой и второй информацией о вращательном перемещении.
В предпочтительном варианте осуществления, при определении положения задней части, различие между первой и второй информацией о вращательном перемещении сравнивается с заданным пороговым значением. Это пороговое значение может, например, быть заранее сохраненным в справочной таблице памяти. Таким образом, также могут быть определены угол поворота и/или направление поворота кабины водителя относительно простирающегося назад сегмента.
В другом предпочтительном варианте осуществления способ, кроме того, содержит отображение поля зрения, которое расположено вне кабины водителя и простирается назад к задней части, а также адаптация поля зрения таким образом, что задняя часть простирающегося назад сегмента всегда расположена в пределах поля зрения.
В данном случае, адаптация поля зрения содержит смещение и/или расширение поля зрения, и выполняется в режиме реального времени таким образом, что водитель транспортного средства получает поддержку при вождении в зависимости от ситуации вождения.
В другом предпочтительном варианте осуществления способ содержит дополнительный шаг получения информации о геометрии транспортного средства, угле поворота рулевого колеса, скорости транспортного средства и/или дополнительных сигналах от транспортного средства, причем определение положения задней части простирающегося назад сегмента основано на этой информации, в дополнение к информации о вращательном перемещении колес.
В предпочтительном варианте изобретения способ содержит определение того, находится ли задняя часть в пределах поля зрения, причем, если задняя часть не находится в пределах поля зрения, поле зрения приспосабливается путем смещения и/или расширения поля зрения и отображения приспособленного поля зрения на системе замены зеркал и/или на зеркальной системе таким образом, что водитель транспортного средства может отследить заднюю часть простирающегося назад сегмента в любое время. Система замены зеркал и/или зеркальная система этого типа, предпочтительно, располагается в кабине водителя и является хорошо видимой для водителя транспортного средства.
Краткое описание чертежей
В последующем, изобретение для примера описывается посредством приложенных чертежей, причем одинаковые ссылочные обозначения на чертежах обозначают одинаковые детали. Чертежи показывают:
Фиг. 1 схематическое представление системы для транспортного средства согласно предпочтительному варианту осуществления,
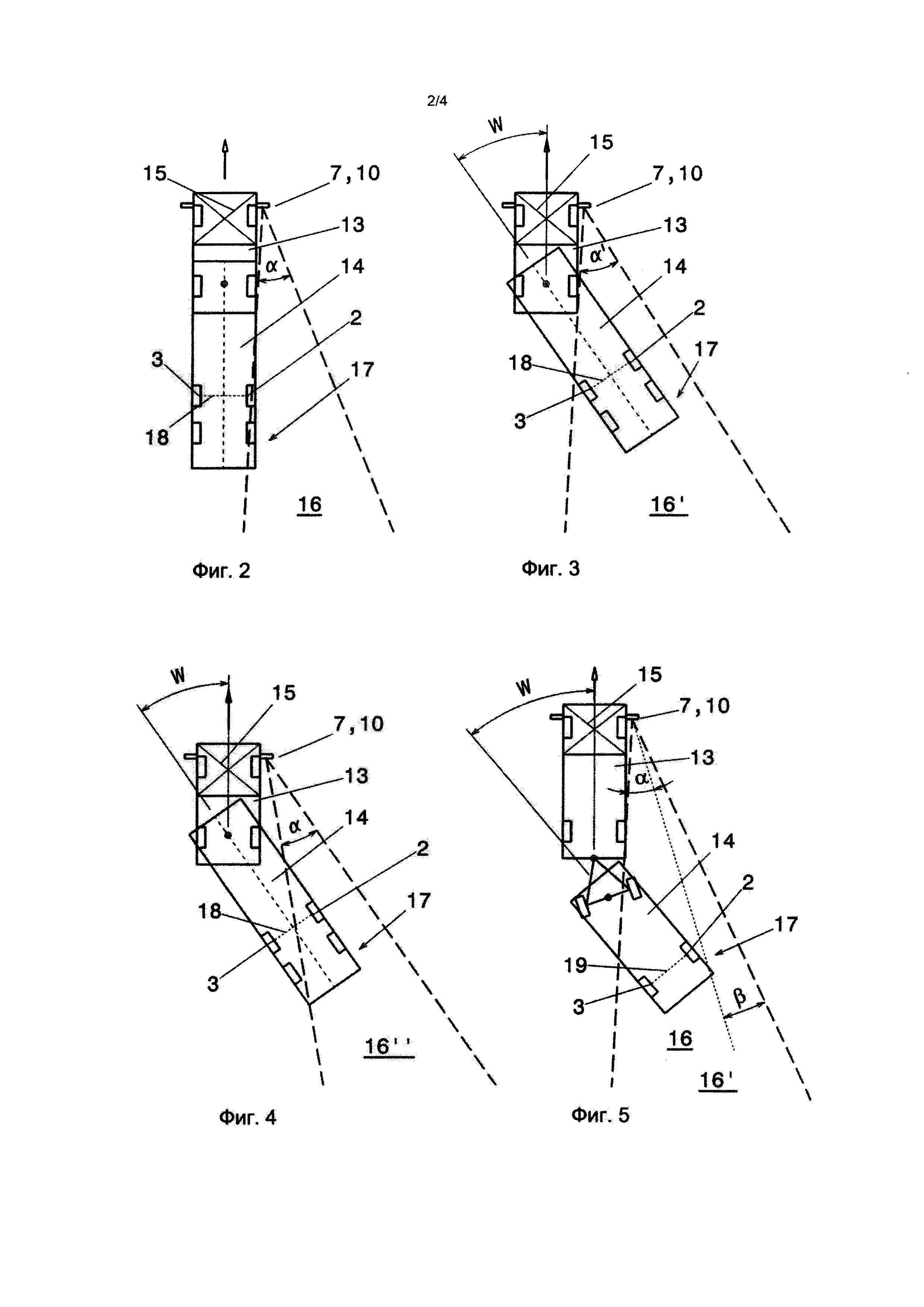
Фиг. 2 вид сверху коммерческого транспортного средства с прицепом, причем транспортное средство использует систему согласно изобретению в первой ситуации вождения,
Фиг. 3 вид сверху коммерческого транспортного средства согласно фиг. 2 во второй ситуации вождения,
Фиг. 4 вид сверху коммерческого транспортного средства согласно фиг. 2 в ситуации вождения согласно фиг. 3,
Фиг. 5 вид сверху коммерческого транспортного средства с прицепом, причем транспортное средство использует систему согласно изобретению в ситуации вождения согласно фиг. 3,
Фиг. 6 схематическое представление частей дуг окружности, по которым колеса коммерческого транспортного средства и прицепа перемещаются в процессе второй ситуации вождения на фиг. 3 и 4, для определения угла W поворота, и
Фиг. 7 схематическое представление частей дуг окружности, по которым колеса коммерческого транспортного средства и прицепа перемещаются в процессе второй ситуации вождения на фиг. 3 и 4, для альтернативного определения угла W поворота.
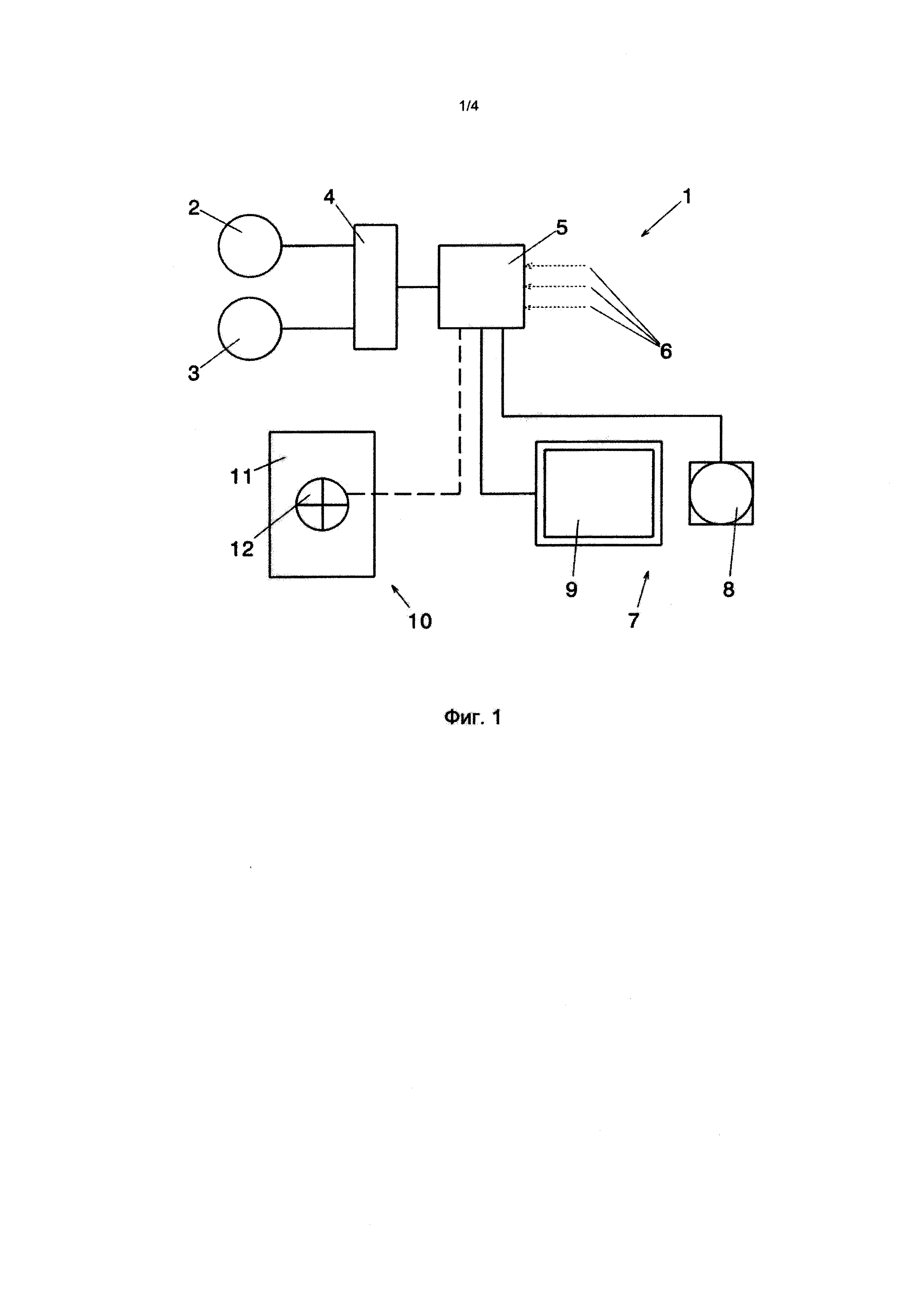
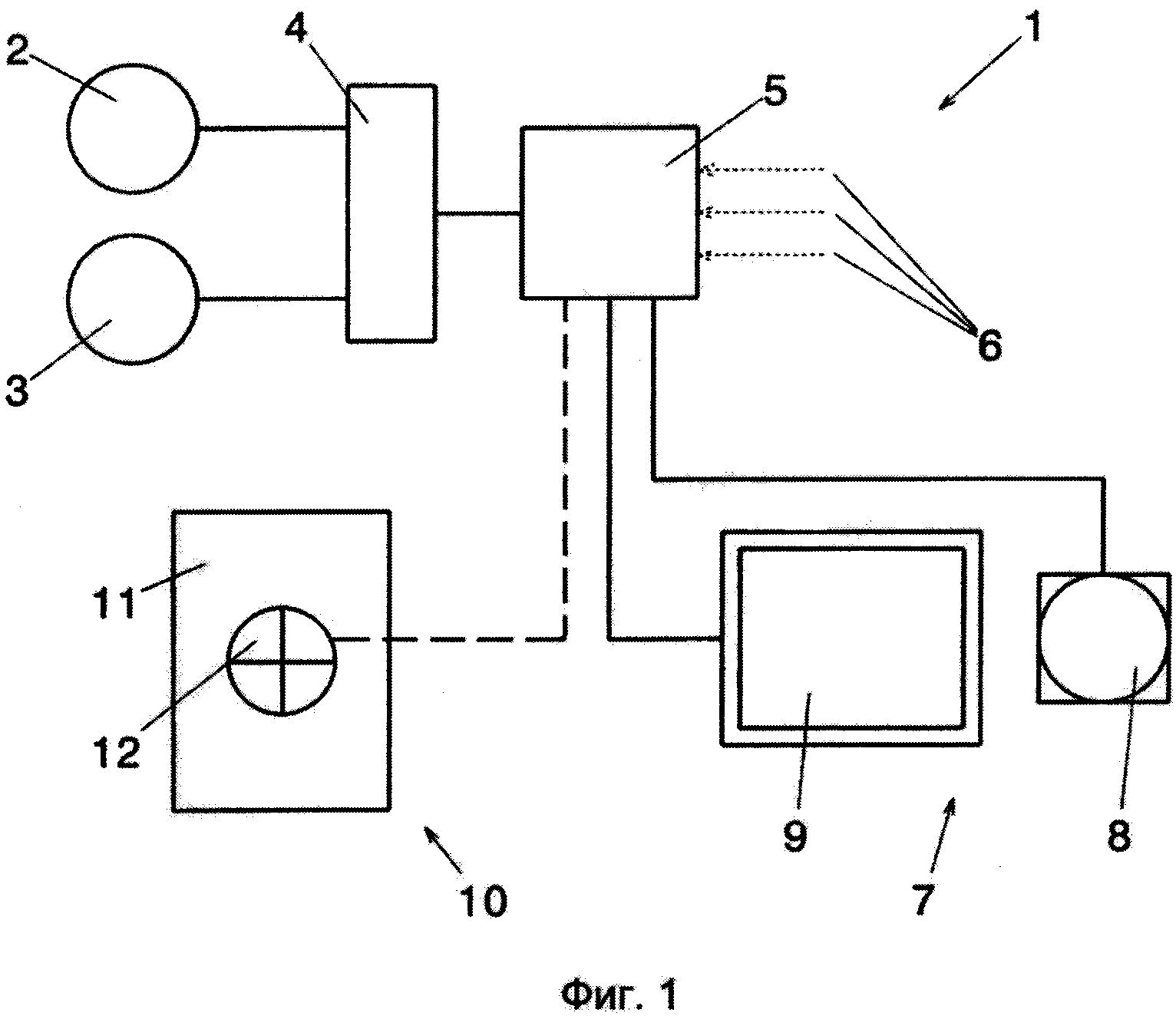
Фиг. 1 показывает схематический вид сверху системы 1 для транспортного средства, причем система получает положение задней части прицепа транспортного средства согласно предпочтительному варианту осуществления изобретения.
Система 1 содержит два колесных датчика 2, 3, которые расположены на противоположных концах оси прицепа, на которой также монтируются колеса. Колесные датчики 2, 3 являются, например, датчиками для получения информации о вращательном перемещении колес, прежде всего для получения информации о скорости вращения и/или направлении вращения колес.
Информация, полученная колесными датчиками 2, 3, обеспечивается управляющему модулю 4, который электрическим образом присоединен к колесным датчикам 2, 3, и обрабатывает полученную информацию с целью определения положения задней части прицепа, угла поворота и/или направления поворота транспортного средства относительно прицепа. Такое определение положения основывается, прежде всего, на полученном различии в скорости вращения между колесом на левой стороне прицепа, где присоединяется колесный датчик 2, и колесом на правой стороне прицепа, где присоединяется другой колесный датчик 3.
Как показано на фиг. 1, управляющий модуль 4 соединен с обрабатывающим модулем 5, который получает информацию (информацию об управлении) от управляющего модуля, причем информация основывается на результатах обработки информации от колесных датчиков 2, 3.
Как показано на фиг. 1, обрабатывающий модуль 5 может дополнительно получать один или несколько сигналов 6 от транспортного средства, таких как, например, сигналы от указателя поворота, заднего хода, данные по протоколу CAN, сигнал скорости, сигнал торможения и т.д.
Хотя управляющий модуль 4 и обрабатывающий модуль 5 на фиг. 1 показаны как отдельные части, управляющий модуль 4 и обрабатывающий модуль 5 также могут быть объединены друг с другом в единый модуль. Прежде всего, управляющий модуль 4 и/или обрабатывающий модуль 5 могут быть частью существующего устройства управления антиблокировочной тормозной системы и/или устройства управления тормозной системы с электронным управлением, причем в этом случае в качестве колесных датчиков 2, 3 могут использоваться имеющиеся там датчики.
Как показано на фиг. 1, обрабатывающий модуль 5, кроме того, служит для получения информации из системы 7 для непрямого обзора. Согласно предпочтительному варианту, показанная на фиг. 1 система 7 для непрямого обзора содержит модуль 8 видеозахвата, а также модуль 9 отображения.
Согласно предпочтительному варианту модуль 8 видеозахвата является камерой, а модуль 9 отображения является видеомонитором. Камера, например, может быть представлена обычной черно-белой камерой, цветной камерой, инфракрасной камерой, ультразвуковой камерой и т.д.
Согласно предпочтительному варианту осуществления модуль 8 видеозахвата, как он показан на фиг. 8, кроме того, способен получать данные о геометрии транспортного средства, например размеры тягача и прицепа, соответственно, полную длину, расстояние системы 7 для непрямого обзора относительно заднего края прицепа транспортного средства и т.д. Прежде всего, для оптического распознавания геометрии транспортного средства модуль 8 видеозахвата может использовать распознавание изображения.
Как показано на фиг. 1, модуль 8 видеозахвата и модуль 9 отображения электрически соединяются с обрабатывающим модулем 5 таким образом, что последний является способным к получению и обработке информации от модуля 8 видеозахвата в дополнение к сигналам 6 от транспортного средства, а также информации об управлении от управляющего модуля 4, и к отображению для водителя транспортного средства соответствующим образом обработанного изображения в модуле 9 отображения.
Согласно предпочтительному варианту в модуле 9 отображения отображается, прежде всего, задняя часть прицепа транспортного средства. Модуль 9 отображения может, например, быть расположенным в кабине водителя таким образом, что водитель может легко и незамедлительно рассмотреть заднюю часть прицепа, которая отображается на модуле 9 отображения. Альтернативно, модуль 9 отображения может использоваться в качестве замены бокового зеркала, и присоединяться в положении, на котором обычно монтируется боковое зеркало.
Как показано на фиг. 1, система 1 согласно предпочтительному варианту осуществления, кроме того, содержит зеркальную систему 10 с зеркальным стеклом 11 и регулировочным механизмом 12. Посредством регулировочного механизма 12 зеркальное стекло 11 может быть надлежащим образом перемещено с целью изменения поля зрения, отображаемого в зеркальном стекле 11.
Зеркальная система 10 электрически соединена с обрабатывающим модулем 5, причем обрабатывающий модуль 5 может, прежде всего, управлять регулировочным механизмом 12 с целью перемещения зеркального стекла 11 таким образом, что отображаемое на зеркальном стекле 11 поле зрения всегда показывает заднюю часть прицепа.
Таким образом, на основании информации, полученной колесными датчиками 2, 3 и, в соответствующих случаях, на основании дополнительно полученных сигналов 6 от транспортного средства, система 1 согласно изобретению выполнена с возможностью регулированию зеркального стекла 11 таким образом, что во время процесса маневрирования, процесса парковки, поворотов налево, поворотов направо и т.д., задняя часть прицепа всегда расположена в пределах поля зрения, отображенного на зеркальном стекле 11.
Подобно зеркальной системе 10, модуль 8 видеозахвата в составе показанной на фиг. 1 системы 7 для непрямого обзора, может быть отрегулирован таким образом, что на основании информации, полученной колесными датчиками 2, 3 и, в соответствующих случаях, на основании дополнительно полученных сигналов 6 от транспортного средства, задняя часть прицепа всегда отображается на модуле 9 отображения.
Хотя фиг. 1 показывает как систему 7 для непрямого обзора, так и зеркальную систему 10, в качестве альтернативы, также является возможным использование только одной из этих систем.
Кроме того, зеркальная система 10, предпочтительно, является зеркальной системой, заменяющей боковое зеркало в кабине водителя для надежного отображения для водителя простирающегося назад поля зрения (простирающегося к задней части прицепа).
Фиг. 2 показывает вид сверху транспортного средства 13, содержащего систему 1, показанную на фиг. 1.
Как показано на фиг. 2, транспортное средство 13 содержит простирающийся назад сегмент 14, который в этом варианте осуществления образован прицепом.
Как показано на фиг. 2, кабина водителя 15 транспортного средства 13 содержит систему 7 для непрямого обзора и/или зеркальную систему 10. Прежде всего, зеркальная система 10 и система 7 для непрямого обзора, соответственно, образованы в качестве бокового зеркала с целью отображения для водителя транспортного средства 13 простирающегося назад поля 16 зрения.
Как показано на фиг. 2, поле 16 зрения простирается в направлении простирающегося назад сегмента 14 транспортного средства, причем, прежде всего, задняя часть 17 располагается в пределах поля 16 зрения.
Фиг. 2 показывает ситуацию вождения, в которой транспортное средство едет прямо вперед, то есть, в которой продольная ось кабины 15 водителя совпадает с продольной осью простирающегося назад сегмента 14, что формирует прямую линию.
Как показано на фиг. 2, колесные датчики 2 и 3, соответственно, монтируются на задней оси 18 простирающегося назад сегмента 14 на противоположных сторонах (то есть, слева и справа от прицепа). Согласно предпочтительному варианту осуществления, колесные датчики 2, 3 особым образом присоединены к ступице колеса. В качестве альтернативы, также является возможным присоединение колесных датчиков непосредственно к колесам, при этом должна быть обеспечена возможность получения по меньшей мере одной скорости вращения и направления вращения колеса, соответственно. Хотя показаны только два колесных датчика, также могут использоваться и более двух колесных датчиков.
Фиг. 3 показывает вид сверху транспортного средства 13 согласно фиг. 2 в ситуации вождения, которая соответствует, например, процессу поворота. В такой ситуации вождения, простирающаяся назад секция 14 отклоняется в боковом направлении таким образом, что образуется угол W между продольной осью транспортного средства 13 и простирающимся назад сегментом. Этот угол W поворота может быть определен посредством колесных датчиков 2, 3 на основании различия в скорости вращения колес.
Согласно фиг. 2, полученные колесными датчиками 2, 3 скорости вращения равняются друг другу, когда транспортное средство 13 едет прямо вперед, тогда как в ситуации вождения согласно фиг. 3, полученная колесным датчиком 3 скорость вращения превышает полученную колесным датчиком 2 скорость вращения, поскольку дуга окружности, по которой колесный датчик 3 перемещается при езде по кривой, является более длинной, чем дуга окружности, по который перемещается при езде по кривой колесный датчик 2.
Знание различия в скоростях вращения, полученных колесными датчиками (не показаны), присоединенными на противостоящих концах одной или нескольких осей транспортного средства 13 и/или простирающегося назад сегмента 14 (прицепа), позволяет произвести вычисление угла поворота. Чем больше информации относительно геометрии транспортного средства 13 и простирающегося назад сегмента 14 является доступной, тем более точным является такое вычисление.
Прежде всего, информация относительно длины и ширины транспортного средства 13 и простирающегося назад сегмента 14, информация относительно расстояния между колесными датчиками на оси, относительно вращательного центра между транспортным средством 13 и простирающимся назад сегментом 14, относительно скорости транспортного средства, относительно езды вперед или назад и т.д. может быть использована для повышения точности вычисления угла W поворота и, как следствие, видеозахвата задней части 17 транспортного средства.
Таким образом, управляющий модуль 4 согласно фиг. 1 может определять как положение задней части 17 простирающегося назад сегмента 14, так и угол поворота или направление поворота, соответственно, кабины 15 водителя относительно простирающегося назад сегмента 14.
Как показано на фиг. 3, в такой ситуации вождения, задняя часть 17 простирающегося назад сегмента 14 отклоняется за пределы поля зрения 16 согласно фиг. 2 таким образом, что без приспосабливания поля зрения 16 согласно фиг. 2, водитель транспортного средства оказывается неспособным к обзору задней части 17 на системе 7 для непрямого обзора и на зеркальной системе 10, соответственно.
Тем не менее, поскольку положение задней части 17 может быть определено на основе информации о вращательном перемещении колес, как описано выше, является возможным управление системой 7 для непрямого обзора и зеркальной системой 10, соответственно, в этой ситуации вождения таким образом, что поле 16 зрения согласно фиг. 2 расширяется с целью обеспечения расположения задней части 17 в пределах поля 16' зрения, как показано на фиг. 3. Таким образом, угол α' поля 16' зрения согласно фиг. 3 превышает угол α поля 16 зрения согласно фиг. 2.
Фиг. 4 показывает ту же ситуацию вождения транспортного средства 13, как она показана на фиг. 3, причем, в противоположность фиг. 3, поле 16 зрения согласно фиг. 2 является не расширенным, но смещенным таким образом, что задняя часть 17 простирающегося назад сегмента 14 может быть отображена для водителя посредством системы 7 для непрямого обзора и зеркальной системы 10, соответственно.
Таким образом, поле 16'' зрения, как изображено на фиг. 4, показывает тот же угол α, что и поле 16 зрения согласно фиг. 2. Путем смещения поля зрения в этом способе, по существу только задняя часть 17 простирающегося назад сегмента 14 отображается для водителя, в противоположность расширению поля 16' зрения согласно фиг. 3, где отображается по существу весь простирающийся назад сегмент 14, включающий в себя заднюю часть 17.
Фиг. 5 показывает вид сверху транспортного средства 13, имеющего простирающийся назад отдельный сегмент 14, в той же ситуации вождения, как на фиг. 3 и 4.
В противоположность фиг. 3 и 4, фиг. 5 показывает колесные датчики 2, 3, которые расположены на противоположных концах оси 19, причем в отличие от показанного на фиг. 2-4, ось 19 является самой задней осью простирающегося назад сегмента 14. Таким образом, задняя часть 17 может быть приближена к заднему краю простирающегося назад сегмента 14.
Подобно показанному на фиг. 3, в варианте осуществления согласно фиг. 5, положение задней части 17 простирающегося назад сегмента 14 определяется посредством колесных датчиков 2, 3, и, отображаемое системой 7 для непрямого обзора и зеркальной системой 10, соответственно, поле зрения соответствующим образом обновляется (отслеживается). В варианте осуществления согласно фиг. 5, поле 16 зрения согласно фиг. 2 расширяется на угол β, подобно показанному на фиг. 3. Согласно предпочтительному варианту на фиг. 5, поле 16' зрения тем самым соответствует полю 16' зрения согласно фиг. 3, причем угол α' согласно фиг. 3 соответствует сумме углов α и β согласно фиг. 5.
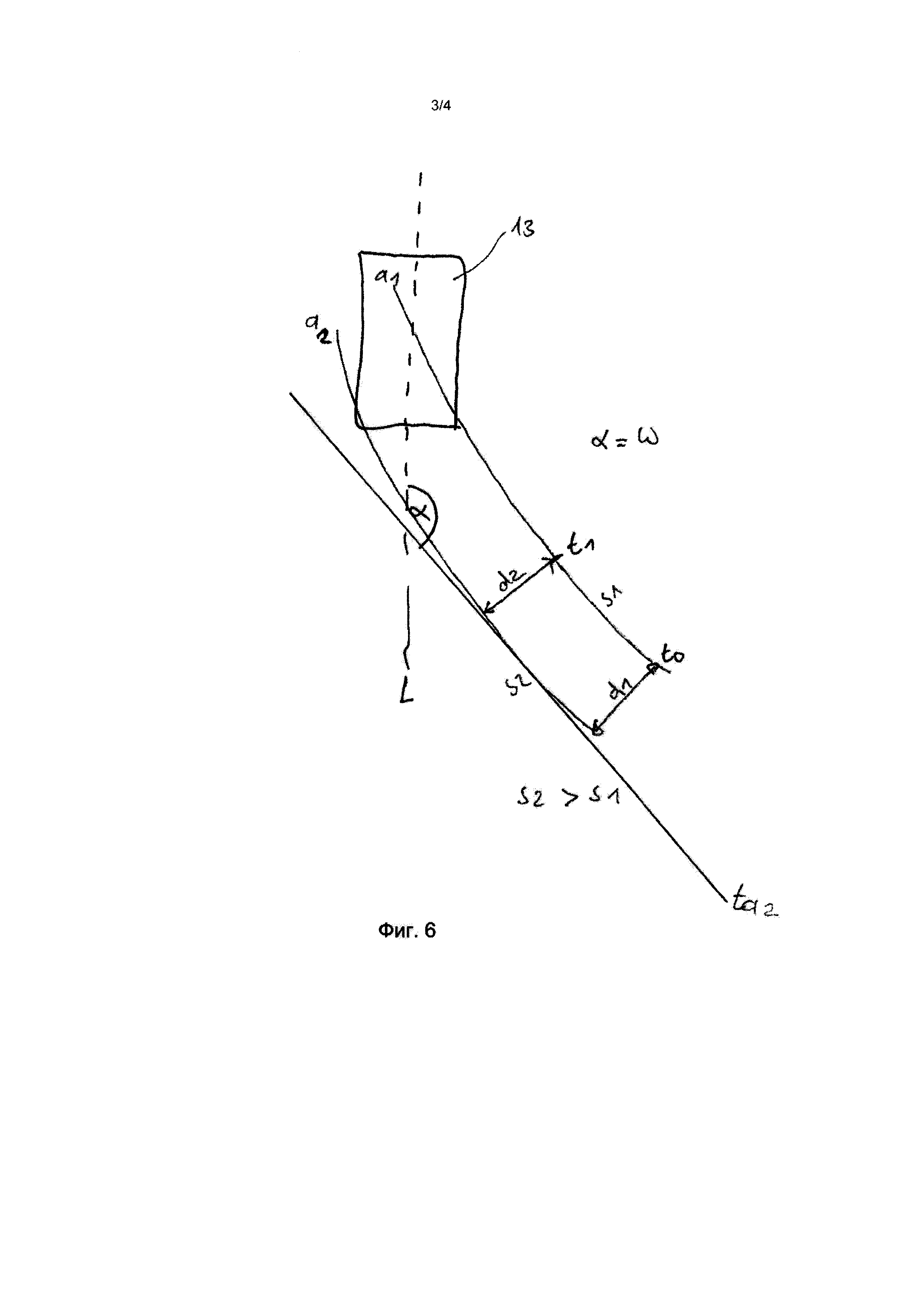
Фиг. 6 показывает схематическое представление частей дуг a1, а2 окружности, по которым колеса коммерческого транспортного средства и прицепа перемещаются в процессе второй ситуации вождения согласно фиг. 3 и 4, для определения угла W поворота.
Как показано на фиг. 6, колеса (не показаны) перемещаются по дугам a1, а2 окружности в процессе этой ситуации вождения. Прежде всего, колеса на правой стороне простирающегося назад сегмента 14 (прицепа) движутся по дуге a1 окружности, тогда как колеса на левой стороне простирающегося назад сегмента 14 движутся по дуге а2 окружности. Как показано на фиг. 6, в течение временного периода t0-t1, колеса на левой и правой стороне простирающегося назад сегмента 14 проходят расстояние s1, s2, соответственно.
Как показано на фиг. 6, при определении прямого участка ta2 пути дуги а2 окружности, например, в показанной на фиг. 6 ситуации вождения, угол W поворота может быть вычислен, например, как угол между продольной осью транспортного средства 13 и прямым участком ta1 пути. Альтернативно или дополнительно, прямой участок пути (не показан) дуги a1 окружности может использоваться для вычисления угла поворота.
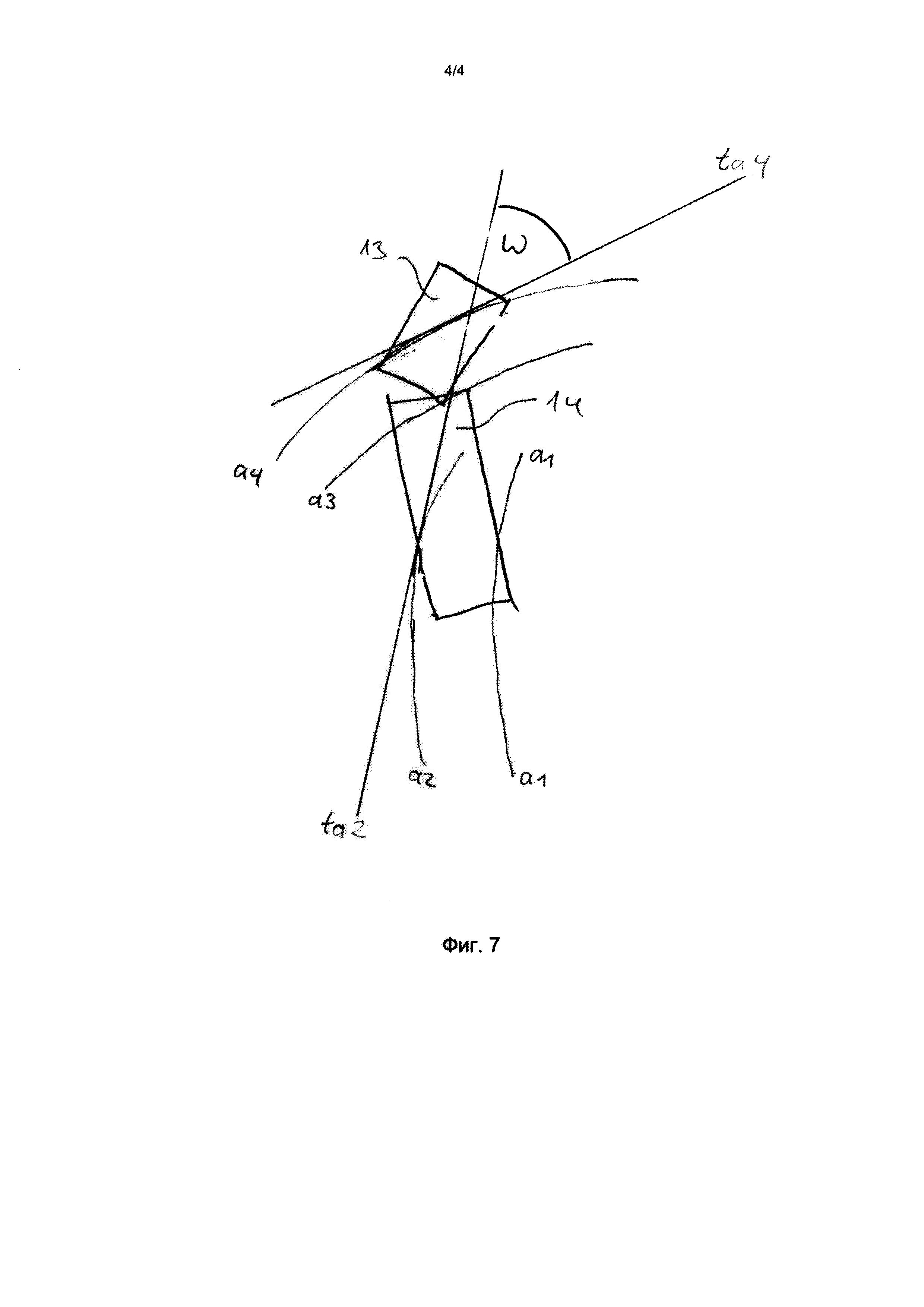
Фиг. 7 показывает схематическое представление частей дуг окружности, по которым колеса коммерческого транспортного средства и прицепа перемещаются в процессе второй ситуации вождения согласно фиг. 3 и 4, для определения угла W поворота.
Как показано на фиг. 7, подобно фиг. 6, определяются дуги a1, а2 окружности, по которым движутся колеса простирающегося назад сегмента 14. Кроме того, определяются дуги а3, а4 окружности, по которым движутся колеса транспортного средства 13. Например, угол между прямым участком ta4 пути дуги а4 окружности и прямым участком ta2 пути дуги а2 окружности может использоваться в качестве соответствующего углу W поворота.
Альтернативно или дополнительно, угол между прямым участком пути (не показан) дуги а3 окружности и прямым участком пути (не показан) дуги a1 окружности могут быть использованы для вычисления угла W поворота.
Прежде всего, угол поворота между транспортным средством 13 и прицепом 14 определяют путем анализа данных по меньшей мере от двух колесных датчиков транспортного средства и/или прицепа, размещенных на противоположных сторонах на оси, и путем рассмотрения дополнительных данных, обеспеченных посредством дополнительных датчиков, например скорости, направление движения, движения вперед/назад, а также рассмотрения дополнительной информации о геометрии транспортного средства и/или прицепа, полученной в режиме реального времени или сохраненной заранее. Как упомянуто выше, чем больше информации и данных используются, тем более точным является определение угла поворота.
При помощи, по меньшей мере, части вышеупомянутых данных и информации, уже оснащающий транспортное средство блок управления двигателем, например, является способным к вычислению угла поворота между транспортным средством и прицепом при помощи математической модели.
Кроме того, при помощи расчетного угла поворота, является возможным видеозахват задней части прицепа и регулировка обзора системы замены зеркал или системы мониторинга на основе камер, которая постоянно обеспечивает водителю наилучший обзор задней части прицепа.
Несмотря на то, что вышеупомянутые варианты осуществления, прежде всего, показывают ситуацию вождения, которая соответствует операции поворота, согласно изобретению также является возможным и в различных других ситуациях вождения, например езде задним ходом, маневрировании, езде по кривым и т.д., определение положения задней части простирающегося назад сегмента (прицепа) на основании информации по вращению колес, причем информация обеспечивается посредством колесных датчиков с целью надлежащего изменения и приспосабливания поля зрения, которое отображается для водителя транспортного средства посредством системы для непрямого обзора и зеркальной системы, соответственно. Такое приспосабливание (регулирование) посредством смещения и расширения, соответственно, поля зрения может иметь место в режиме реального времени при вождении. Этим обеспечивается постоянное нахождение в поле зрения водителя задней части транспортного средства по существу в неискаженном (несжатом) представлении, что обеспечивает, таким образом, безопасное вождение.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 система
2, 3 колесные датчики
4 управляющий модуль
5 обрабатывающий модуль
6 сигналы от транспортного средства
7 система для непрямого обзора
8 модуль видеозахвата
9 модуль отображения
10 зеркальная система
11 зеркальное стекло
12 регулировочный механизм
13 транспортное средство
14 сегмент
15 кабина водителя
16 поле зрения
17 задняя часть
18 ось
19 ось
Внешнее оптическое устройство, регулируемое по длине
Автоматически переключающийся сцепляющий механизм для средства регулировки наружного зеркала автомобильного транспортного средства
Оптическое устройство, в частности, для внешнего зеркала транспортного средства
Электрически вращательный регулирующий блок, в частности, для непрямых визуальных систем для транспортных средств
Система визуального отображения и оснащенное ею транспортное средство
Система съёмочной камеры c модульным расположением печатных плат
Система визуализации для транспортных средств
Система замещения зеркал для транспортного средства
Шаровое шарнирное устройство, крепежное устройство и система непрямого наблюдения для транспортного средства
Цепной соединитель

