Результат интеллектуальной деятельности: ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ - "ЛЕТАЮЩИЙ МОТОЦИКЛ"
Вид РИД
Изобретение
Летательный аппарат вертикального взлета и посадки - «летающий мотоцикл» относится к области авиастроения.
Известен летательный аппарат вертикального взлета и посадки - «летающий мотоцикл» выполненный по схеме квадрокоптера: Scorpion-3 компании Hoversurf журнал «Популярная механика» русское издание №3 март 2017 год ООО «Премиум Паблишинг».
В данном летательном аппарате вертикального взлета и посадки - «летающем мотоцикле» аэродинамическая сила создается 4 воздушными винтами, которые приводятся в движение электродвигателями. Встроенный компьютер обрабатывает положение летательного аппарата, обеспечивает стабилизацию и управление. Использование 4 воздушных винтов, управляемых компьютером позволило разместить пилота выше центра тяжести летательного аппарата.
В данном летательном аппарате вертикального взлета и посадки - «летающем мотоцикле» электроника и программное обеспечение являются слабым местом, в котором скрыто максимальное количество рисков и отказов при повышенной турбулентности, из-за этого высота полета ограничена, а так же не возможен режим авторотации.
Технической задачей заявленного изобретения является повышение устойчивости летательного аппарата вертикального взлета и посадки - «летающего мотоцикла» по крену и тангажу при взлете, полете и приземлении, возможность режима авторотации.
Технический результат, обеспечиваемый изобретением, заключается в улучшении управляемости летательным аппаратом вертикального взлета и посадки - «летающим мотоциклом», повышении уровня безопасности пилота.
Поставленная техническая задача в летательном аппарате вертикального взлета и посадки - «летающем мотоцикле» содержащем корпус в виде полого цилиндра, расположенного вертикально, силовую установку, опирающуюся на четырехколесное шасси, два соосных вертикально-осевых ротора с лопастями, автомат перекоса, верхнюю платформу в форме усеченного прямого кругового конуса, образующую кабину пилота, систему управления летательным аппаратом, кресло пилота и парашютную спасательную систему, достигается тем, что на роторах установлены сменяемые грузы.
Лопасти, установленные по периметру двух соосных вертикально-осевых роторов, обеспечивают создание аэродинамической силы, автомат перекоса позволяет изменять направление вектора аэродинамической силы, обеспечить режим авторотации, сменяемые грузы в виде калиброванных по весу металлических деталей, установленные на роторах, служат для изменения величины момента инерции, выполняют функцию гироскопа.
Устойчивость летательного аппарата вертикального взлета и посадки - «летающего мотоцикла» будет находиться в прямой зависимости от веса сменяемых грузов. Грузы большего веса следует устанавливать для учебно-тренировочных полетов, грузы меньшего веса для полетов пилотов, получивших навыки управления летательным аппаратом.
Роторы и верхняя платформа, выполненные в форме усеченного прямого кругового конуса позволяют понизить центр тяжести пилота.
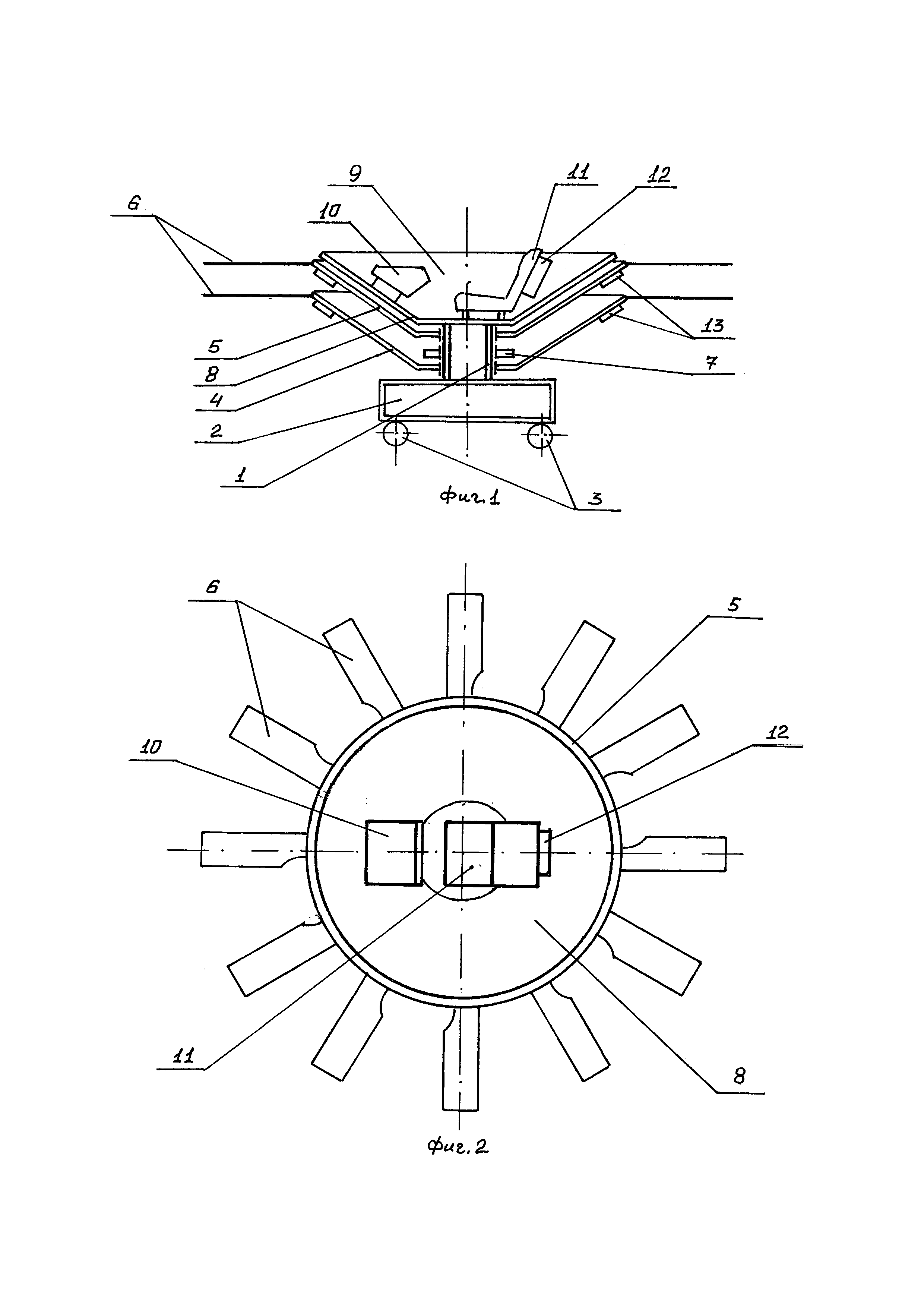
Изобретение поясняется чертежами, где на фиг. 1 изображен летательный аппарат, вид сбоку в разрезе по оси корпуса; на фиг. 2 изображен летательный аппарат, вид сверху.
Летательный аппарат вертикального взлета и посадки - «летающий мотоцикл» содержит корпус 1 в виде полого цилиндра, расположенного вертикально, силовую установку 2, опирающуюся на четырехколесное шасси 3, два соосных вертикально-осевых ротора 4 и 5 на которых закреплены сменяемые грузы 13 и лопасти 6, автомат перекоса 7, верхнюю платформу 8, образующую кабину пилота 9, систему управления летательным аппаратом 10, кресло пилота 11 и парашютную спасательную систему 12.
Летательный аппарат вертикального взлета и посадки - «летающий мотоцикл» работает следующим образом. При стоянке летательный аппарат опирается на четырехколесное шасси 3. Перед выполнением взлета пилот производит запуск двигателя, от которого через редукторы вращение передается на роторы 4 и 5. При вертикальном взлете увеличивается частота вращения роторов 4 и 5, пилотом с помощью системы управления автоматом перекоса 7 синхронно увеличивается общий шаг лопастей 6 для образования аэродинамической силы, необходимой для подъема летательного аппарата, при этом величина крутящего момента ротора 4 равна величине крутящего момента ротора 5. Для компенсации реактивного момента роторы имеют противоположное направление вращения. Для поворота летательного аппарата в горизонтальной плоскости необходимо увеличить или уменьшить разность между величиной крутящего момента ротора 4 и величиной крутящего момента ротора 5. Маневрирование летательного аппарата при горизонтальном полете обеспечивает автомат перекоса 7 путем изменения направления вектора аэродинамической силы создаваемой лопастями 6. При посадке пилот уменьшает скорость полета, переводит летательный аппарат в режим зависания, снижает частоту вращения роторов 4, 5, летательный аппарат приземляется.
Летательный аппарат вертикального взлета и посадки - «летающий мотоцикл», содержащий корпус в виде полого цилиндра, расположенного вертикально, силовую установку, опирающуюся на четырехколесное шасси, два соосных вертикально-осевых ротора с лопастями, автомат перекоса, верхнюю платформу, образующую кабину пилота, содержащую систему управления летательным аппаратом, кресло пилота, парашютную спасательную систему, отличающийся тем, что на роторах установлены сменяемые грузы для изменения величины момента инерции.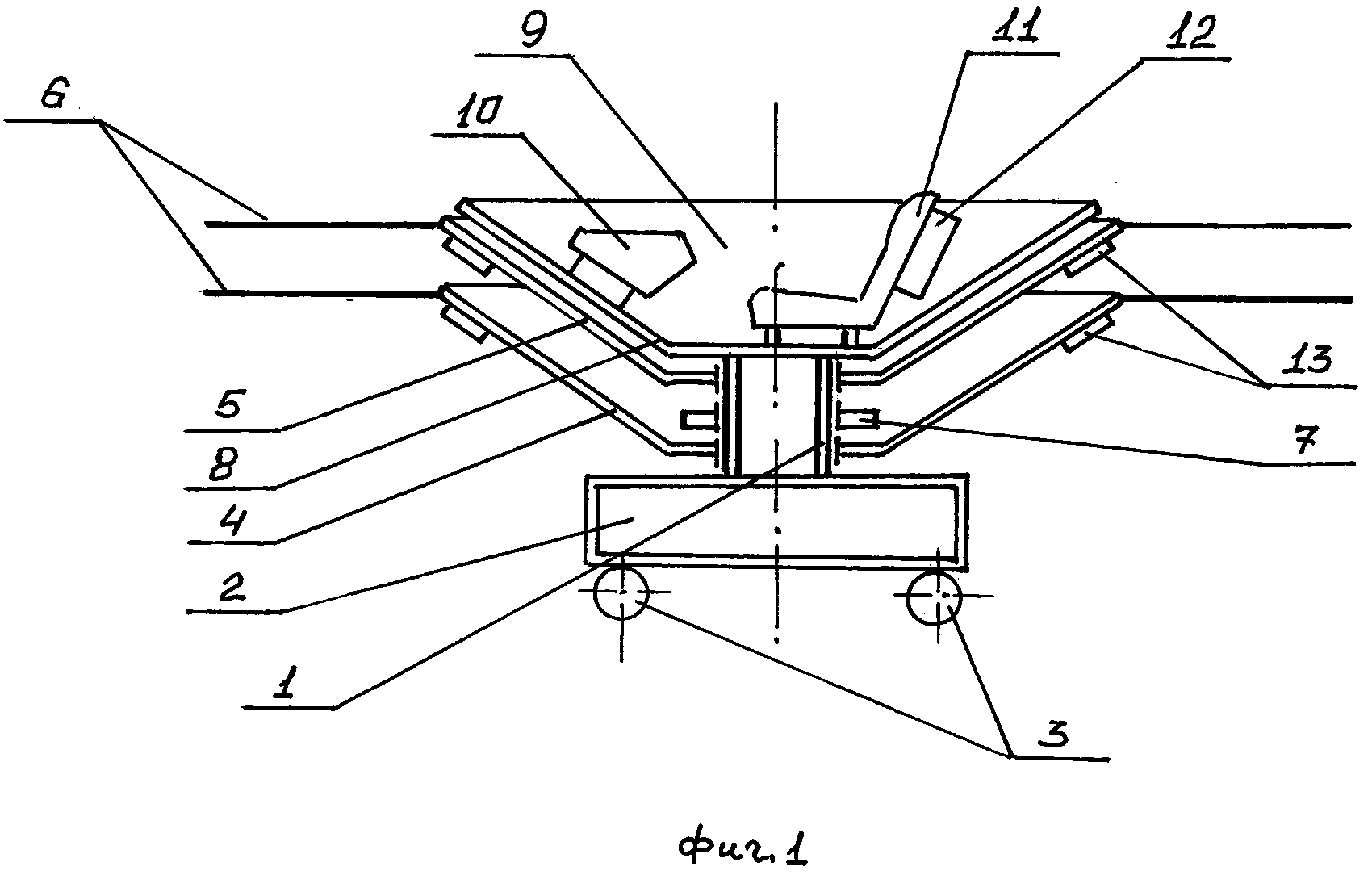
Способ и устройство определения содержания питательных веществ в почве
Летательный аппарат вертикального взлёта и посадки
Летательный аппарат вертикального взлёта и посадки
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"
Способ и устройство определения содержания питательных веществ в почве
Летательный аппарат вертикального взлёта и посадки
Способ обнаружения атак перебора на веб-сервис
Устройство ускоренного компостирования органических отходов
Летательный аппарат вертикального взлёта и посадки
Способ ускоренного компостирования органических отходов
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"

