Результат интеллектуальной деятельности: ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ
Вид РИД
Изобретение
Летательный аппарат вертикального взлета и посадки относится к области авиастроения.
Известны летательные аппараты вертикального взлета и посадки с соосной схемой расположения двух несущих вертолетных винтов: вертолеты Ка - 15, Ка - 18, Ка - 20, Ка - 25, Ка - 26, Ка - 27, Ка - 29, Ка - 32, Ка - 50, Ка - 52 «Неизвестный Камов: гений вертикального взлета» / Лидия Кузьмина. - М.: Яуза: Эксмо, 2009.
Несущие вертолетные винты в данных аппаратах расположены над фюзеляжем, вращаются в противоположных направлениях, оснащены автоматом перекоса. Соосная схема расположения несущих вертолетных винтов позволила исключить рулевой винт, увеличить подъемную силу летательных аппаратов за счет сложения аэродинамических сил обеих несущих вертолетных винтов.
В данных аппаратах фюзеляж находится в воздушном потоке обеих несущих вертолетных винтов, оказывает сопротивление воздушному потоку, снижает подъемную силу. Увеличение горизонтальных габаритных размеров фюзеляжа приведет к дальнейшему снижению подъемной силы.
Технической задачей заявленного изобретения является создание конструкции летательного аппарата вертикального взлета и посадки с более высокими силовыми и размерными характеристиками.
Технический результат, обеспечиваемый изобретением, заключается в уменьшении влияния габаритных размеров фюзеляжа на подъемную силу, увеличении грузоподъемности летательного аппарата вертикального взлета и посадки.
Поставленная техническая задача в летательном аппарате вертикального взлета и посадки, содержащем корпус в виде полого цилиндра, расположенного вертикально, и двух горизонтальных платформ круглой формы, силовую установку на верхней платформе, закрытую сверху обтекателем, по форме близким к полусфере, вал по оси корпуса, в верхней части которого установлен несущий вертолетный винт с автоматом перекоса, кабину с системой управления под нижней платформой, достигается тем, что между верхней и нижней платформами устанавливается осевой аксиальный вентилятор, состоящий из ротора и лопастей, ось вращения осевого аксиального вентилятора совпадает с осью корпуса.
Осевой аксиальный вентилятор имеет направление вращения, противоположное направлению вращения несущего вертолетного винта, это позволяет устранить реактивный момент от вращения несущего вертолетного винта, отказаться от второго несущего вертолетного винта, исключить его воздействие на фюзеляж.
Установленный на верхней платформе обтекатель, по форме близкий к полусфере, дополнительно уменьшает сопротивление воздушному потоку, создаваемому несущим вертолетным винтом, направляет воздушный поток к лопастям осевого аксиального вентилятора.
Осевой аксиальный вентилятор создает дополнительную аэродинамическую силу, увеличивает грузоподъемность летательного аппарата. Увеличение аэродинамической силы, создаваемой осевым аксиальным вентилятором, может быть достигнуто не только увеличением угловой скорости вращения ротора осевого аксиального вентилятора, но и за счет количества лопастей, устанавливаемых по периметру ротора. Длина окружности ротора позволяет разместить по его периметру большее количество лопастей.
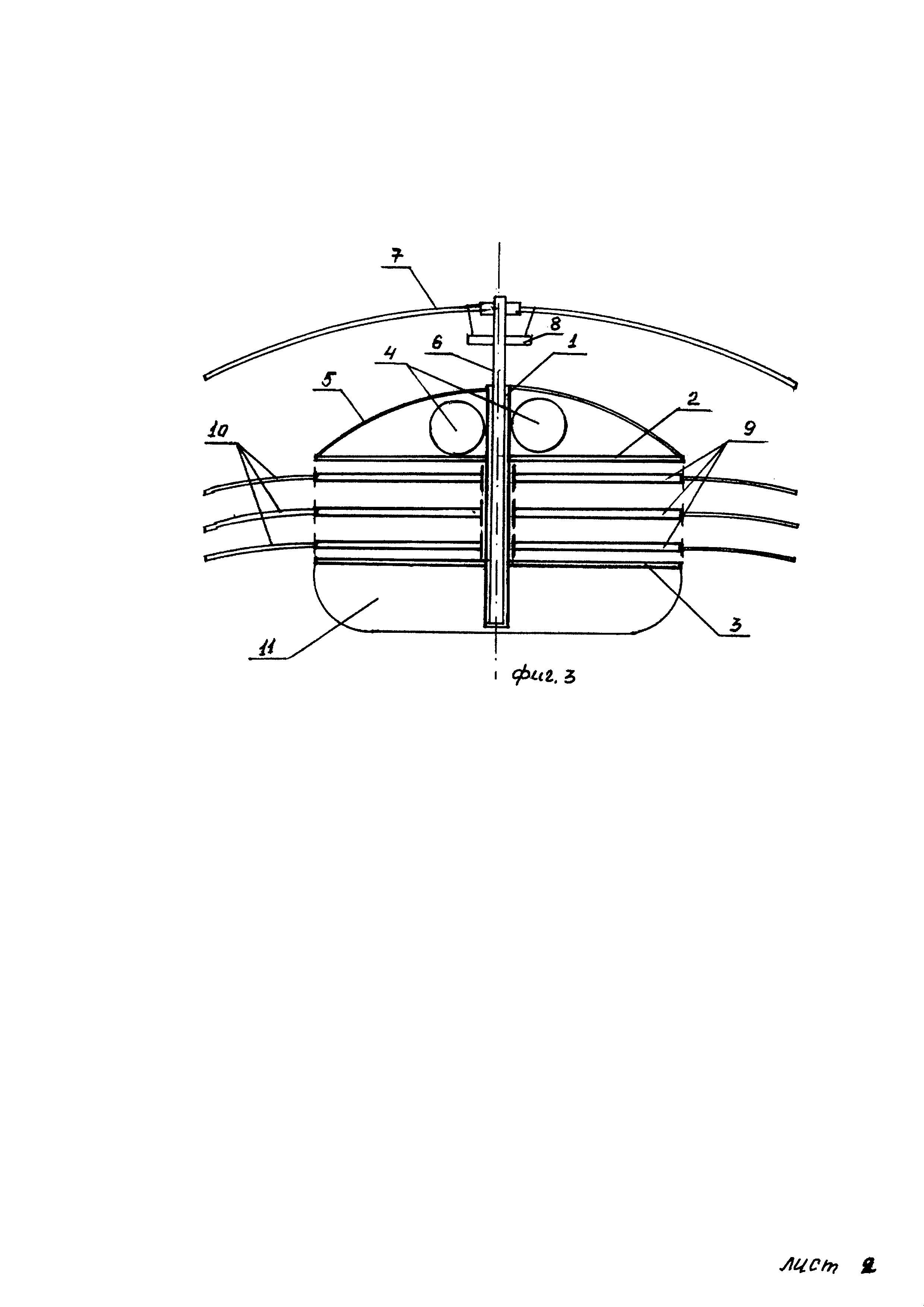
При установке на летательном аппарате многоярусного осевого аксиального вентилятора вентилятор будет работать по принципу компрессора. Скорость и давление потока воздуха, создаваемого несущим вертолетным винтом, будет увеличиваться кратно количеству ярусов вентилятора. Направление вращения роторов при установке трех ярусного осевого аксиального вентилятора должно быть следующим, направление вращения среднего ротора совпадает с направлением вращения несущего вертолетного винта, верхний и нижний роторы должны вращаться в сторону, противоположную направлению вращения несущего вертолетного винта.
Применение многоярусного осевого аксиального вентилятора позволит создать летательный аппарат вертикального взлета и посадки с высокими аэродинамическими характеристиками. Габаритными горизонтальными размерами летательного аппарата будет являться диаметр платформ.
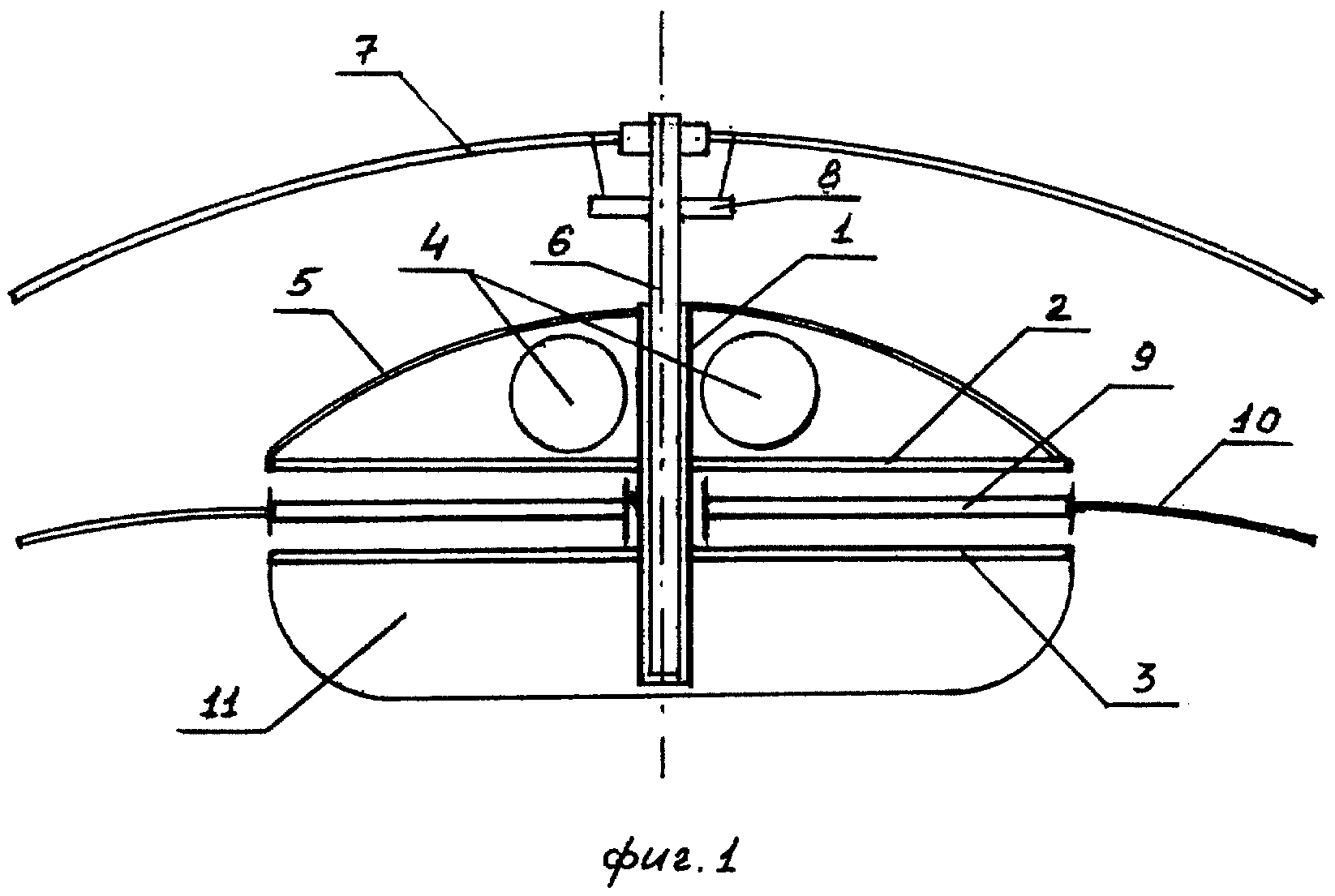
Изобретение поясняется чертежами, где на фиг. 1 изображен летательный аппарат, вид сбоку в разрезе по оси корпуса с осевым аксиальным вентилятором, состоящим из одного ротора и лопастей; на фиг. 2 изображен летательный аппарат, вид сверху; на фиг. 3 изображен летательный аппарат, вид сбоку в разрезе по оси корпуса с многоярусным осевым аксиальным вентилятором, состоящим из трех роторов и лопастей.
Летательный аппарат вертикального взлета и посадки содержит корпус 1 в виде полого цилиндра и двух горизонтальных платформ 2, 3 круглой формы. На верхней платформе 2 размещается силовая установка 4, закрытая сверху обтекателем 5, по форме близким к полусфере. По оси корпуса 1 расположен вал 6, в верхней части вала 6 установлен несущий вертолетный винт 7 с автоматом перекоса 8. Между верхней платформой 2 и нижней платформой 3 установлен осевой аксиальный вентилятор, состоящий из ротора 9 и лопастей 10. Под нижней платформой 3 размещается кабина 11 с системой управления летательным аппаратом.
Летательный аппарат вертикального взлета и посадки работает следующим образом. При стоянке летательный аппарат опирается на основание, являющееся нижней частью кабины 11. Перед выполнением взлета пилот производит запуск двигателей, от которых через редукторы и вал 6 вращение передается на несущий вертолетный винт 7 и ротор 9 осевого аксиального вентилятора. При вертикальном взлете увеличивается частота вращения несущего вертолетного винта 7 и ротора 9 осевого аксиального вентилятора, пилотом с помощью системы управления автоматом перекоса 8 увеличивается общий шаг несущего вертолетного винта 7 для образования аэродинамической силы, необходимой для подъема летательного аппарата, при этом величина крутящего момента несущего вертолетного винта 7 равна величине крутящего момента ротора 9 осевого аксиального вентилятора. Для компенсации реактивного момента ротор 9 осевого аксиального вентилятора имеет направление вращения, противоположное направлению вращения несущего вертолетного винта 7. Для поворота летательного аппарата в горизонтальной плоскости необходимо увеличить или уменьшить разность между величиной крутящего момента несущего вертолетного винта 7 и величиной крутящего момента ротора 9 осевого аксиального вентилятора. Маневрирование летательного аппарата при горизонтальном полете обеспечивает автомат перекоса 8 путем изменения направления вектора аэродинамической силы, создаваемой несущим вертолетным винтом 7. При посадке пилот уменьшает скорость полета, переводит летательный аппарат в режим зависания, снижает частоту вращения несущего вертолетного винта 7 и ротора 9 осевого аксиального вентилятора, летательный аппарат приземляется.
Летательный аппарат вертикального взлета и посадки, содержащий корпус в виде полого цилиндра, расположенного вертикально, и двух горизонтальных платформ круглой формы, силовую установку на верхней платформе, закрытую сверху обтекателем, по форме близким к полусфере, вал по оси корпуса, в верхней части которого установлен несущий вертолетный винт с автоматом перекоса, кабину с системой управления под нижней платформой, отличающийся тем, что между верхней и нижней платформами установлен осевой аксиальный вентилятор, состоящий из ротора и лопастей, ось вращения осевого аксиального вентилятора совпадает с осью корпуса.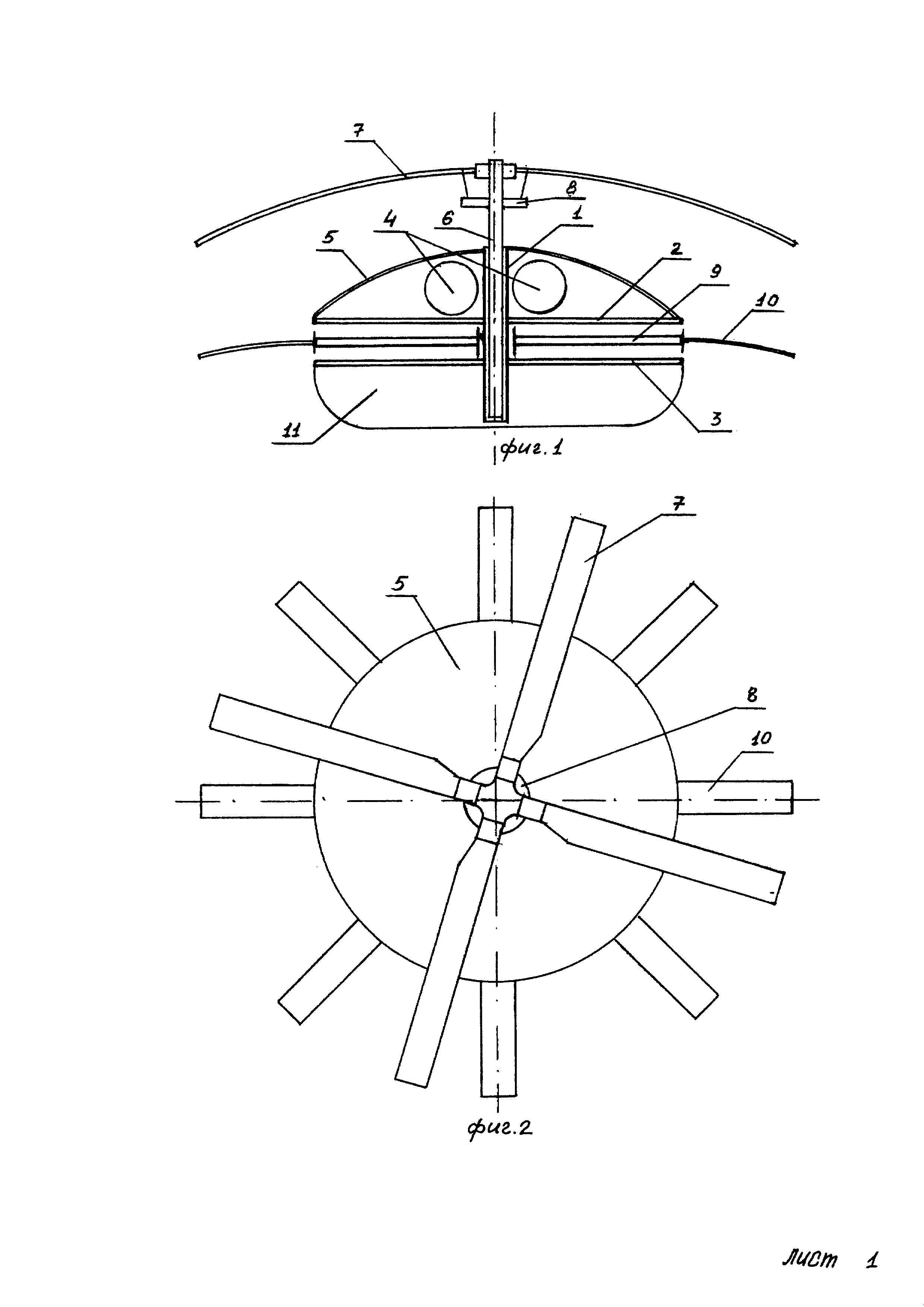
Способ и устройство определения содержания питательных веществ в почве
Летательный аппарат вертикального взлёта и посадки
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"
Способ и устройство определения содержания питательных веществ в почве
Способ обнаружения атак перебора на веб-сервис
Устройство ускоренного компостирования органических отходов
Летательный аппарат вертикального взлёта и посадки
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"
Способ ускоренного компостирования органических отходов
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"

