Результат интеллектуальной деятельности: ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ
Вид РИД
Изобретение
Известен летательный аппарат вертикального взлета и посадки с комбинированной соосной схемой состоящей из несущего вертолетного винта и ротора с лопастями: заявка на изобретение RU №2016104263 от 09.02.2016 г. «Бюллетень №23 от 14.08.2017 г. Федеральной службы по интеллектуальной собственности (Роспатент)».
В данном летательном аппарате вертикального взлета и посадки аэродинамическая сила создается несущим вертолетным винтом и лопастями, закрепленными по периметру ротора, маневрирование летательного аппарата при горизонтальном полете обеспечивается несущим вертолетным винтом. Использование комбинированной соосной схемы расположения несущего вертолетного винта и ротора с лопастями позволило уменьшить влияние горизонтальных габаритных размеров фюзеляжа на подъемную силу.
В данном летательном аппарате несущий вертолетный винт перекрывает пространство над верхней частью фюзеляжа, не позволяет использовать парашютную спасательную систему и катапультирование пилота.
Технической задачей заявленного изобретения является исключение несущего вертолетного винта из конструкции летательного аппарата.
Технический результат, обеспечиваемый изобретением, заключается в создании конструкции летательного аппарата вертикального взлета и посадки со свободным пространством в верхней части фюзеляжа.
Поставленная техническая задача в летательном аппарате вертикального взлета и посадки, содержащем корпус в виде полого цилиндра, расположенного вертикально и две горизонтальные платформы круглой формы, силовую установку и кабину с системой управления летательным аппаратом на верхней платформе, закрытую обшивкой верхней части фюзеляжа, два соосных вертикально-осевых ротора с лопастями, прикрепленными к роторам через вертикальный, горизонтальный и осевой шарниры, верхний и нижний обтекатели по форме близкие к усеченной полусфере, неподвижно закрепленные по периметру роторов, нижнюю часть фюзеляжа под нижней платформой и телескопические опоры, достигается тем, что между роторами устанавливается автомат перекоса.
Лопасти, прикрепленные по периметру к соосным вертикально-осевым роторам, обеспечивают создание аэродинамической силы, а установленный автомат перекоса позволяет изменять направление вектора аэродинамической силы.
Применение автомата перекоса между двух соосных вертикально-осевых роторов с лопастями позволит исключить несущий вертолетный винт и оставить свободным пространство над верхней частью фюзеляжа.
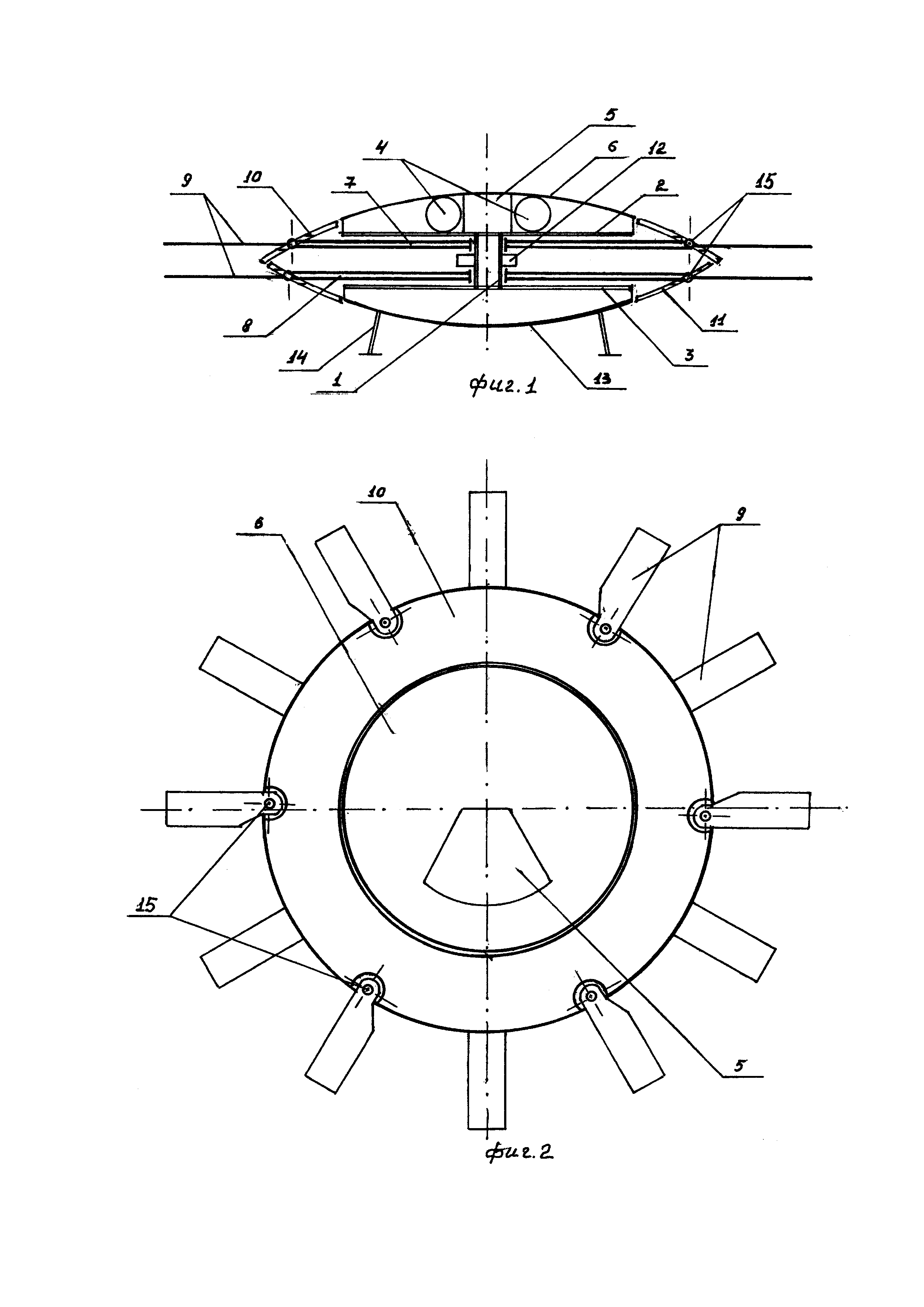
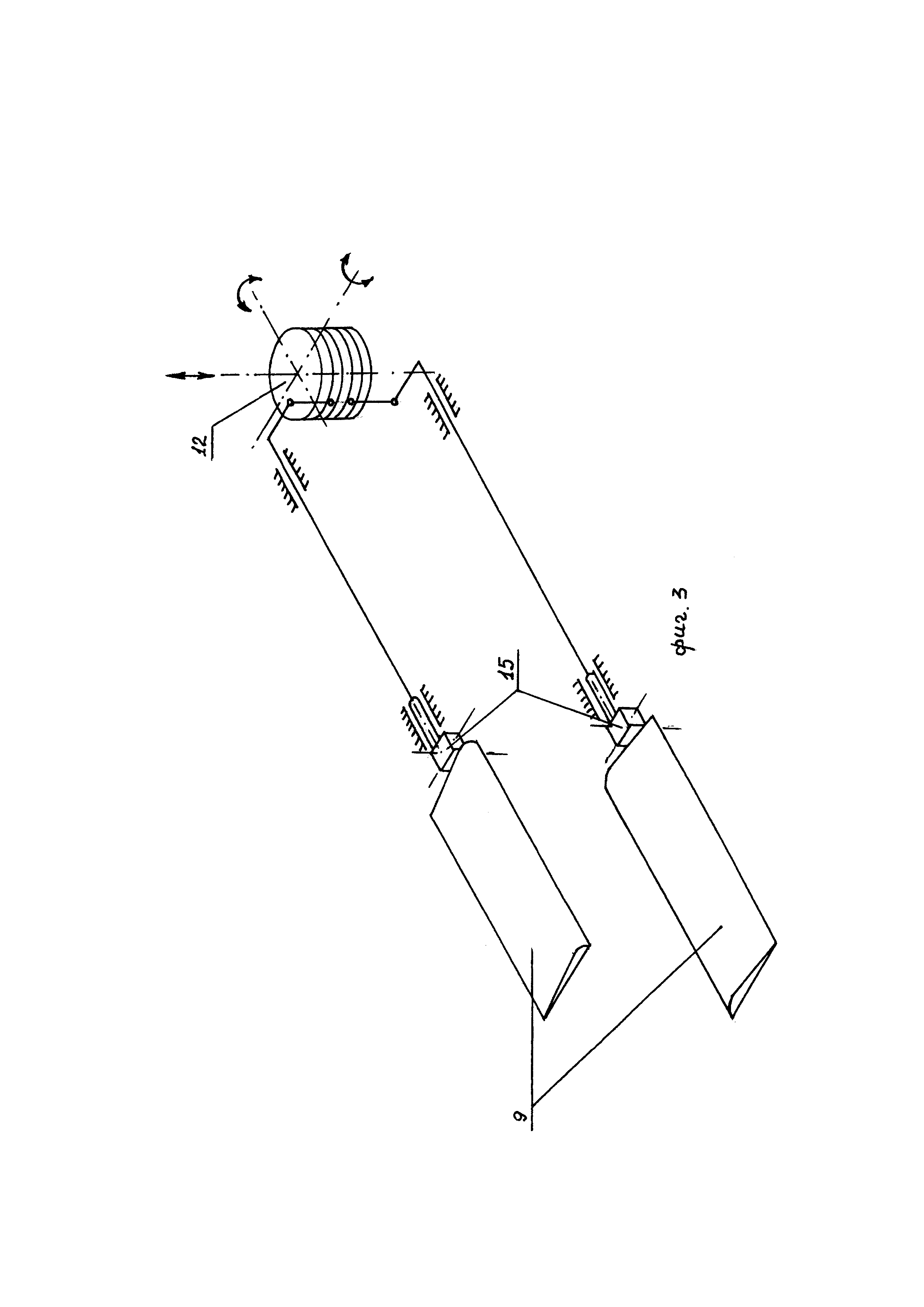
Изобретение поясняется чертежами, где на фиг. 1 изображен летательный аппарат, вид сбоку в разрезе по оси корпуса; на фиг. 2 изображен летательный аппарат, вид сверху, на фиг. 3 изображена схема синхронного изменения угла установки лопастей автоматом перекоса.
Летательный аппарат вертикального взлета и посадки содержит корпус 1 в виде полого цилиндра и две горизонтальные платформы 2, 3 круглой формы. На верхней платформе 2 размещается силовая установка 4 и кабина 5 с системой управления летательным аппаратом, закрытые обшивкой верхней части фюзеляжа 6. Между верхней платформой 2 и нижней платформой 3 установлены два соосных вертикально-осевых ротора 7, 8. К ротору 7 и 8 по периметру закреплены верхний 10 и нижний 11 обтекатели, по форме близкие к усеченной полусфере. Через отверстия в обтекателях 10, 11, с помощью вертикального, горизонтального и осевого шарниров 15, лопасти 9 присоединены к роторам 7, 8. Между роторами 7, 8 установлен автомат перекоса 12. Под нижней платформой 3 размещается нижняя часть фюзеляжа 13, которая опирается на телескопические опоры 14 летательного аппарата.
Летательный аппарат вертикального взлета и посадки работает следующим образом. При стоянке летательный аппарат опирается на телескопические опоры 14. Перед выполнением взлета пилот производит запуск двигателей, от которых через редукторы вращение передается на соосные вертикально-осевые роторы 7, 8. При вертикальном взлете увеличивается частота вращения соосных вертикально-осевых роторов 7, 8, пилотом с помощью системы управления автоматом перекоса 12 синхронно увеличивается общий шаг лопастей 9 для образования аэродинамической силы, необходимой для подъема летательного аппарата, при этом величина крутящего момента ротора 7 равна величине крутящего момента ротора 8. Для компенсации реактивного момента ротор 7 имеет направление вращения противоположное направлению вращения ротора 8. Для поворота летательного аппарата в горизонтальной плоскости необходимо увеличить или уменьшить разность между величиной крутящего момента ротора 7 и величиной крутящего момента ротора 8. Маневрирование летательного аппарата при горизонтальном полете обеспечивает автомат перекоса 12 путем изменения направления вектора аэродинамической силы создаваемой лопастями 9. При посадке пилот уменьшает скорость полета, переводит летательный аппарат в режим зависания, снижает частоту вращения роторов 7, 8, летательный аппарат приземляется.
Летательный аппарат вертикального взлета и посадки, содержащий корпус в виде полого цилиндра, расположенного вертикально, и две горизонтальные платформы круглой формы, силовую установку и кабину с системой управления на верхней платформе, закрытую обшивкой верхней части фюзеляжа, между верхней и нижней платформой два соосных вертикально-осевых ротора с лопастями, верхний и нижний обтекатели, по форме близкие к усеченной полусфере, закрепленные по периметру роторов, нижнюю часть фюзеляжа под нижней платформой, опирающуюся на телескопические опоры, отличающийся тем, что имеет автомат перекоса, установленный между соосными вертикально-осевыми роторами для синхронного изменения угла установки лопастей.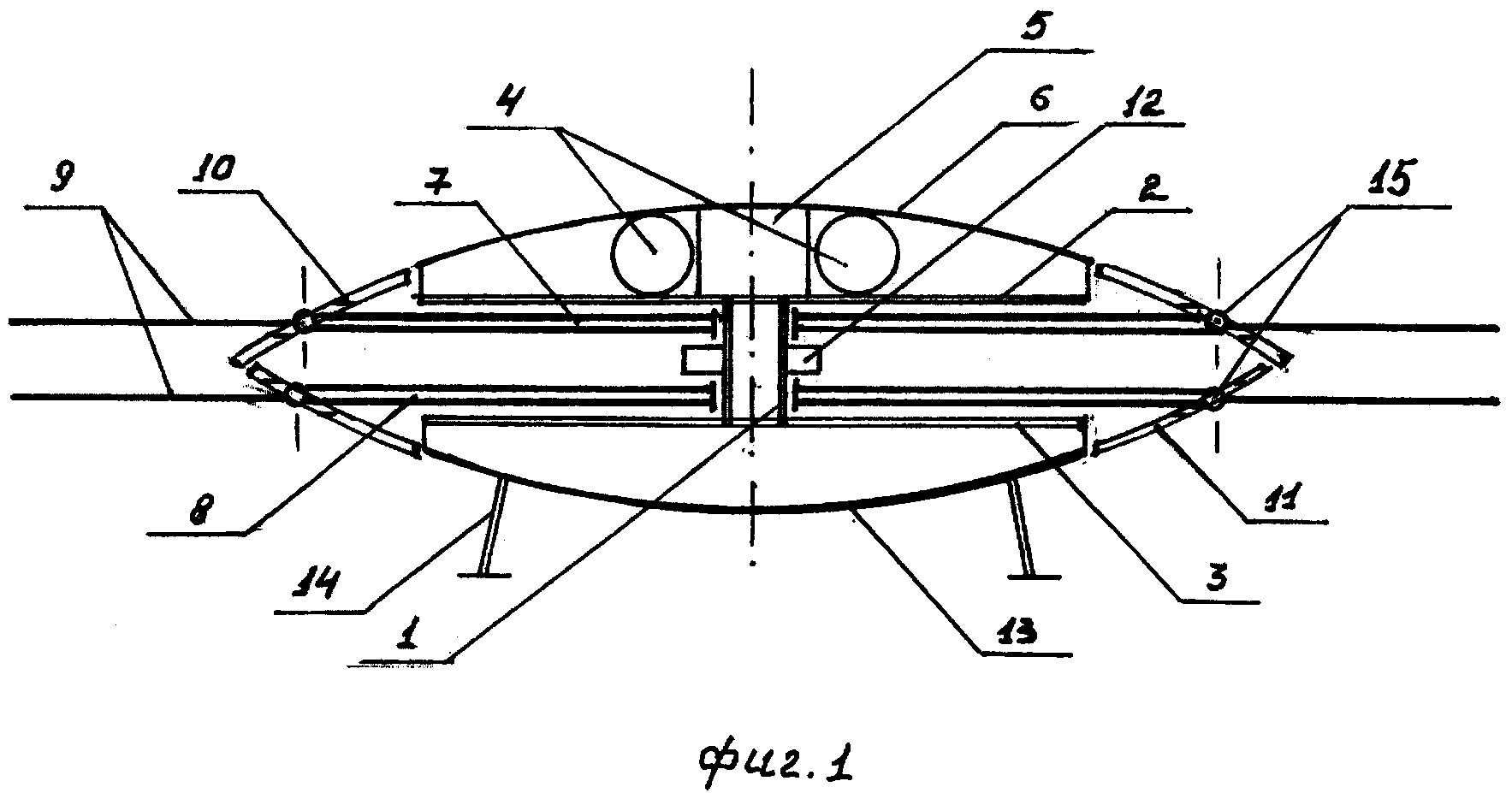
Способ и устройство определения содержания питательных веществ в почве
Летательный аппарат вертикального взлёта и посадки
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"
Способ и устройство определения содержания питательных веществ в почве
Летательный аппарат вертикального взлёта и посадки
Способ обнаружения атак перебора на веб-сервис
Устройство ускоренного компостирования органических отходов
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"
Способ ускоренного компостирования органических отходов
Летательный аппарат вертикального взлёта и посадки - "летающий мотоцикл"

