Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ (ВАРИАНТЫ) ПАРАЛЛЕЛЬНОЙ ПАРКОВКИ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится в общем к системам содействия парковке и, в частности, к улучшенным системе и способу содействия парковке для параллельной парковки транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Параллельная парковка транспортного средства может быть трудна для многих водителей. Таким образом, есть необходимость в системе содействия парковке, которая может выполнять маневр параллельной парковки на целевое место стоянки при минимальном требуемом действии водителя.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Согласно одному из аспектов настоящего изобретения, предусмотрена система для параллельной парковки транспортного средства на целевом месте стоянки. Сенсорная система выполнена с возможностью обнаружения объектов, расположенных вблизи целевого места стоянки. Система содействия парковке соединена с возможностью связи с сенсорной системой. Система содействия парковке выполнена с возможностью автоматического управления направлением движения транспортного средства во время маневра движения задним ходом на целевое место стоянки, при этом ограничивая скорость транспортного средства на основании угла поворота рулевого колеса. Сенсорная система также выполнена с возможностью автоматического управления направлением движения транспортного средства во время маневров в пределах целевого места стоянки, при этом ограничивая скорость транспортного средства на основании относительного положения по меньшей мере одного из ограничивающего сзади объекта и ограничивающего спереди объекта.
Согласно еще одному аспекту настоящего изобретения предусмотрен способ параллельной парковки транспортного средства на целевом месте стоянки. Способ включает в себя этапы: (a) обнаружения объектов, расположенных вблизи целевого места стоянки; (b) автоматического управления направлением движения транспортного средства во время маневра движения задним ходом на целевое место стоянки, при этом ограничивая скорость транспортного средства на основании угла поворота рулевого колеса; и (c) автоматического управления направлением движения транспортного средства во время маневров в пределах целевого места стоянки, при этом ограничивая скорость транспортного средства на основании относительного положения по меньшей мере одного из ограничивающего сзади объекта и ограничивающего спереди объекта.
Согласно еще одному другому аспекту настоящего изобретения предусмотрен способ параллельной парковки транспортного средства на целевом месте стоянки. Способ включает в себя этапы: (a) обнаружения объектов, расположенных вблизи целевого места стоянки; (b) автоматического управления направлением движения транспортного средства во время маневра движения задним ходом на целевое место стоянки, при этом ограничивая скорость транспортного средства первой скоростью, когда угол поворота рулевого колеса является меньшим, чем пороговый угол поворота рулевого колеса; (c) автоматического управления направлением движения транспортного средства во время маневра движения задним ходом и ограничения скорости транспортного средства второй скоростью, когда угол поворота рулевого колеса является равным или большим, чем пороговый угол поворота рулевого колеса; (d) автоматического управления направлением движения транспортного средства, когда транспортное средство движется задним ходом в пределах целевого места стоянки, и ограничения скорости транспортного средства третьей скоростью, если ограничивающий сзади объект обнаружен на более чем первом расстоянии от транспортного средства; (e) автоматического управления направлением движения транспортного средства, когда транспортное средство движется задним ходом в пределах целевого места стоянки, и ограничения скорости транспортного средства четвертой скоростью, если ограничивающий сзади объект находится на первом расстоянии или в пределах первого расстояния от транспортного средства; (f) автоматического управления направлением движения транспортного средства, когда транспортное средство движется вперед в пределах целевого места стоянки, и ограничения скорости транспортного средства пятой скоростью, если ограничивающий спереди объект обнаружен на более чем втором расстоянии от транспортного средства; и (g) автоматического управления направлением движения транспортного средства, когда транспортное средство движется вперед в пределах целевого места стоянки, и ограничения скорости транспортного средства шестой скоростью, если ограничивающий спереди объект обнаружен на втором расстоянии или в пределах второго расстояния от транспортного средства.
Эти и другие аспекты, цели и признаки настоящего изобретения будут поняты и оценены по достоинству специалистами в данной области техники по изучению следующего описания изобретения, формулы изобретения и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
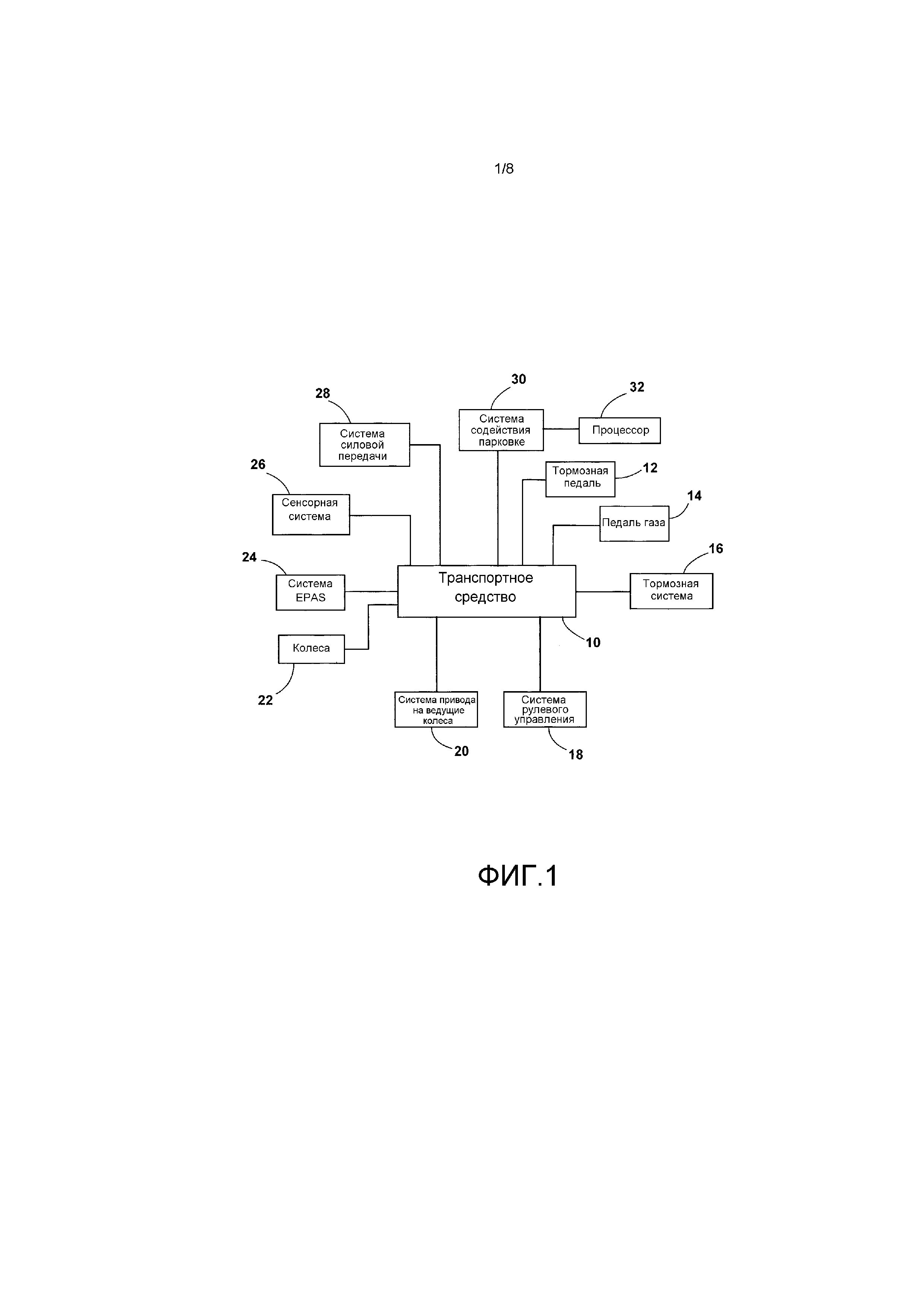
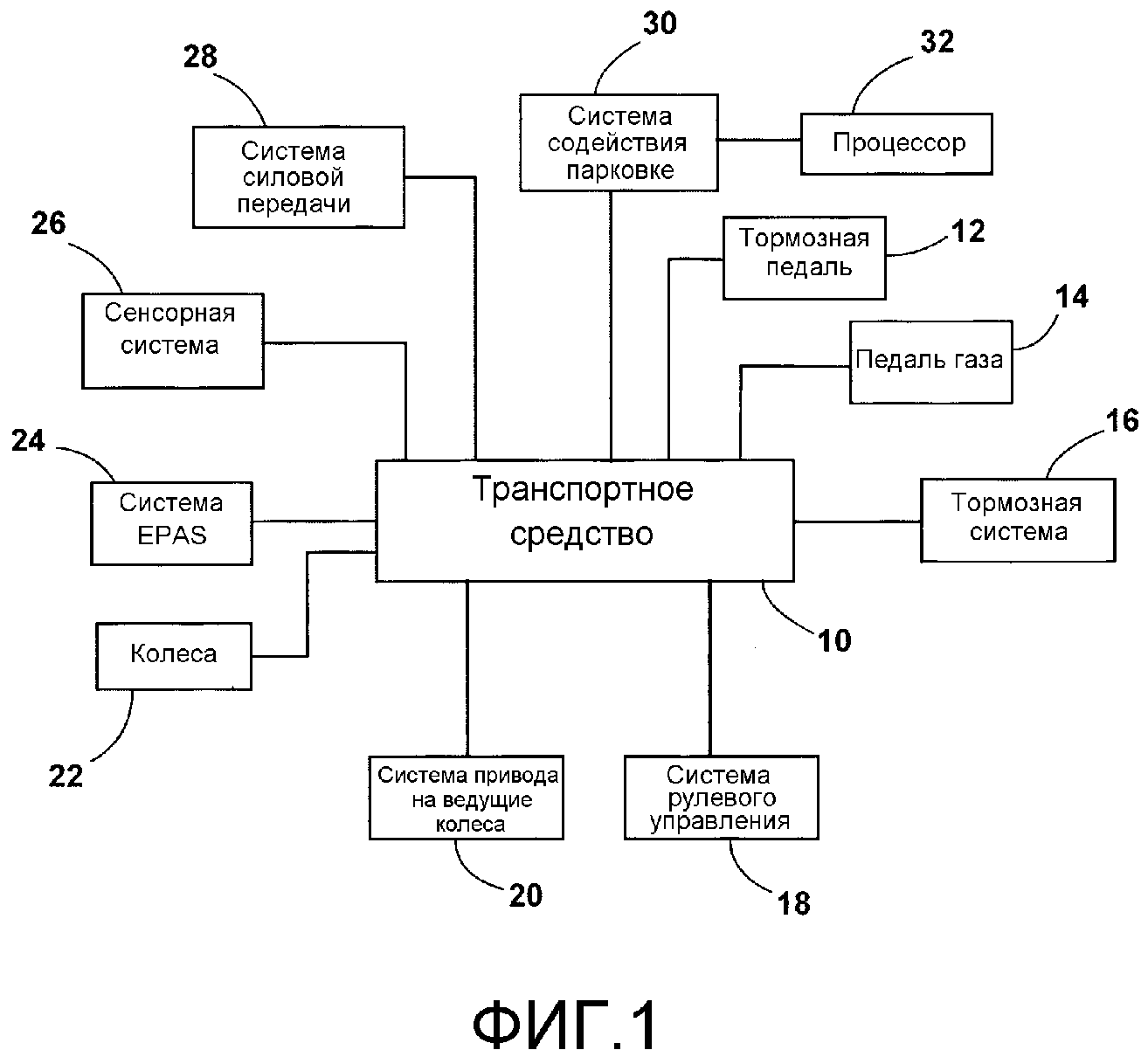
фиг.1 - принципиальная схема транспортного средства, оборудованного системой содействия парковке и другими связанными компонентами и оборудованием;
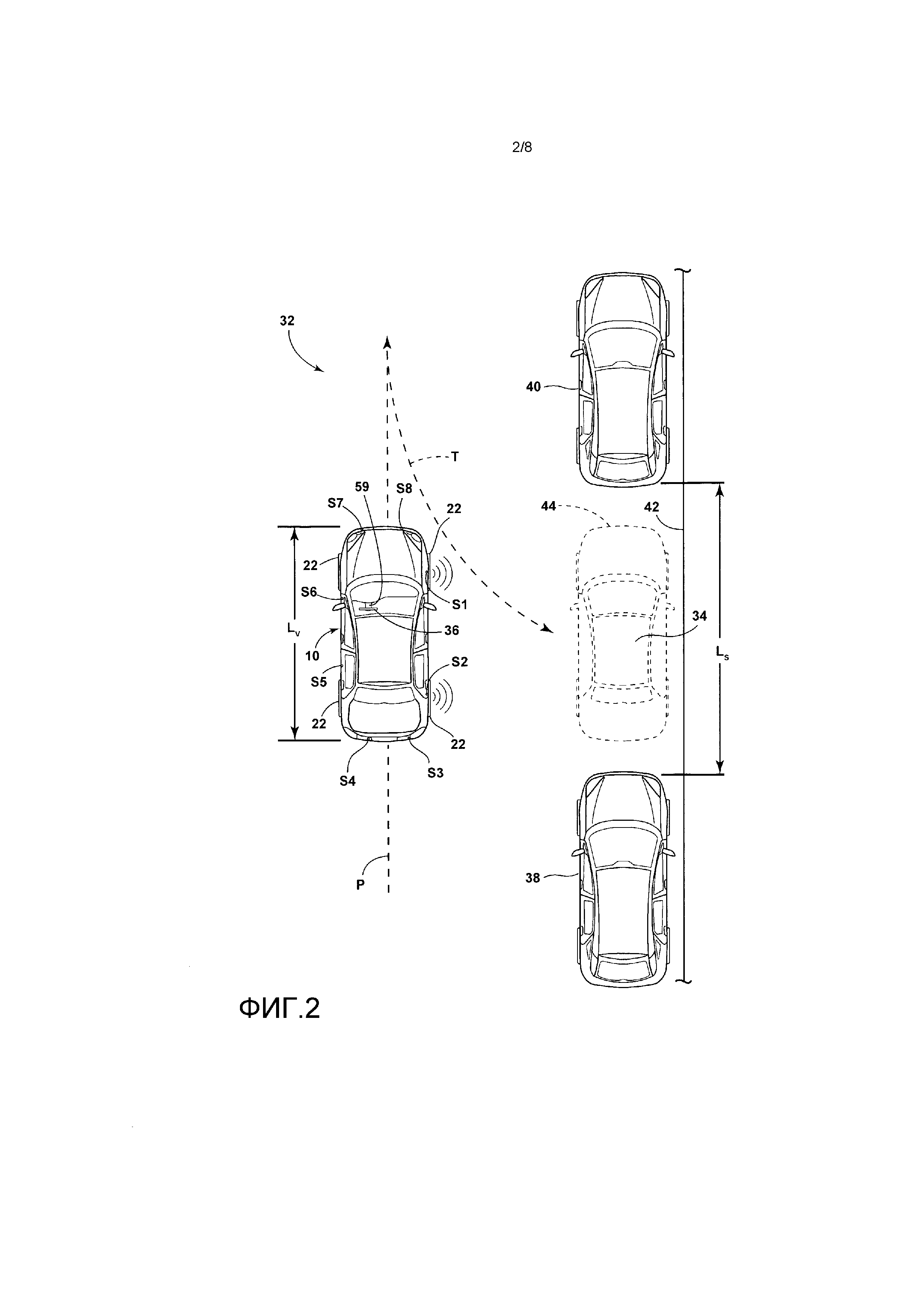
фиг.2 иллюстрирует траекторию рулевого управления для движения задним ходом транспортного средства, оборудованного системой содействия парковке на целевое место стоянки;
фиг.3 - блок-схема способа параллельной парковки транспортного средства на целевое место стоянки;
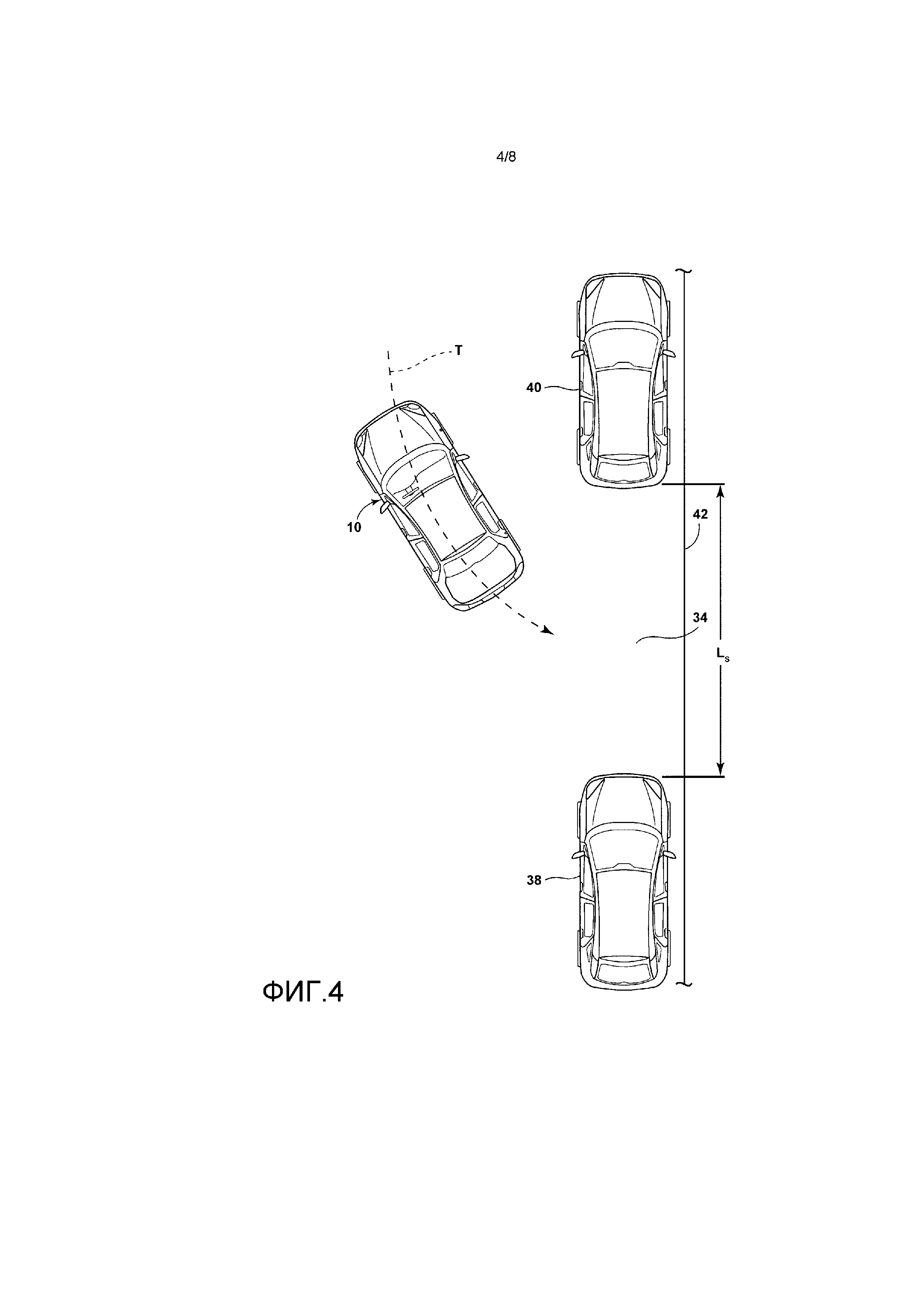
фиг.4 иллюстрирует маневр движения задним ходом вдоль траектории управления направлением движения на целевое место стоянки;
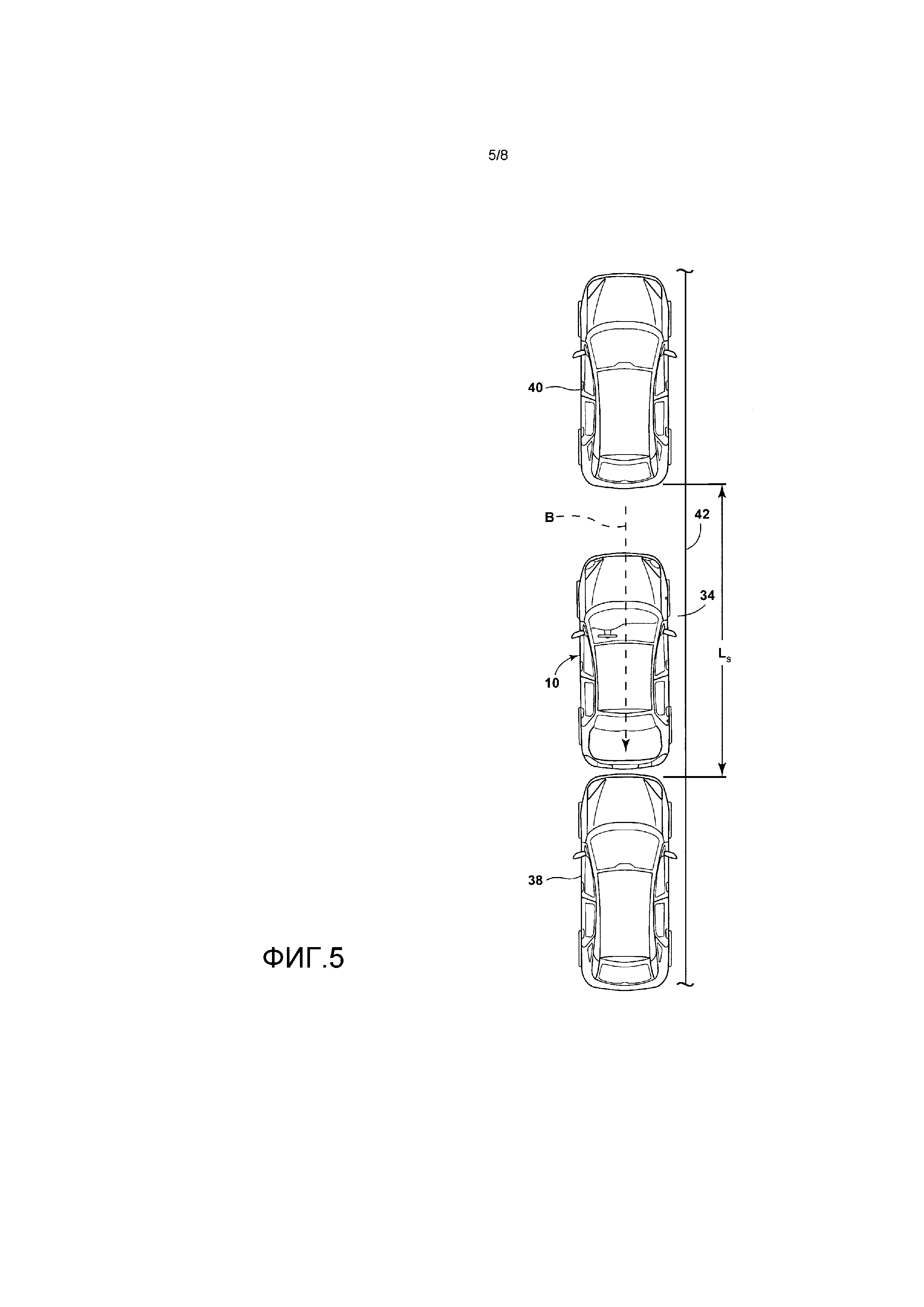
фиг.5 иллюстрирует маневр движения задним ходом вдоль траектории в обратном направлении в пределах целевого места стоянки;
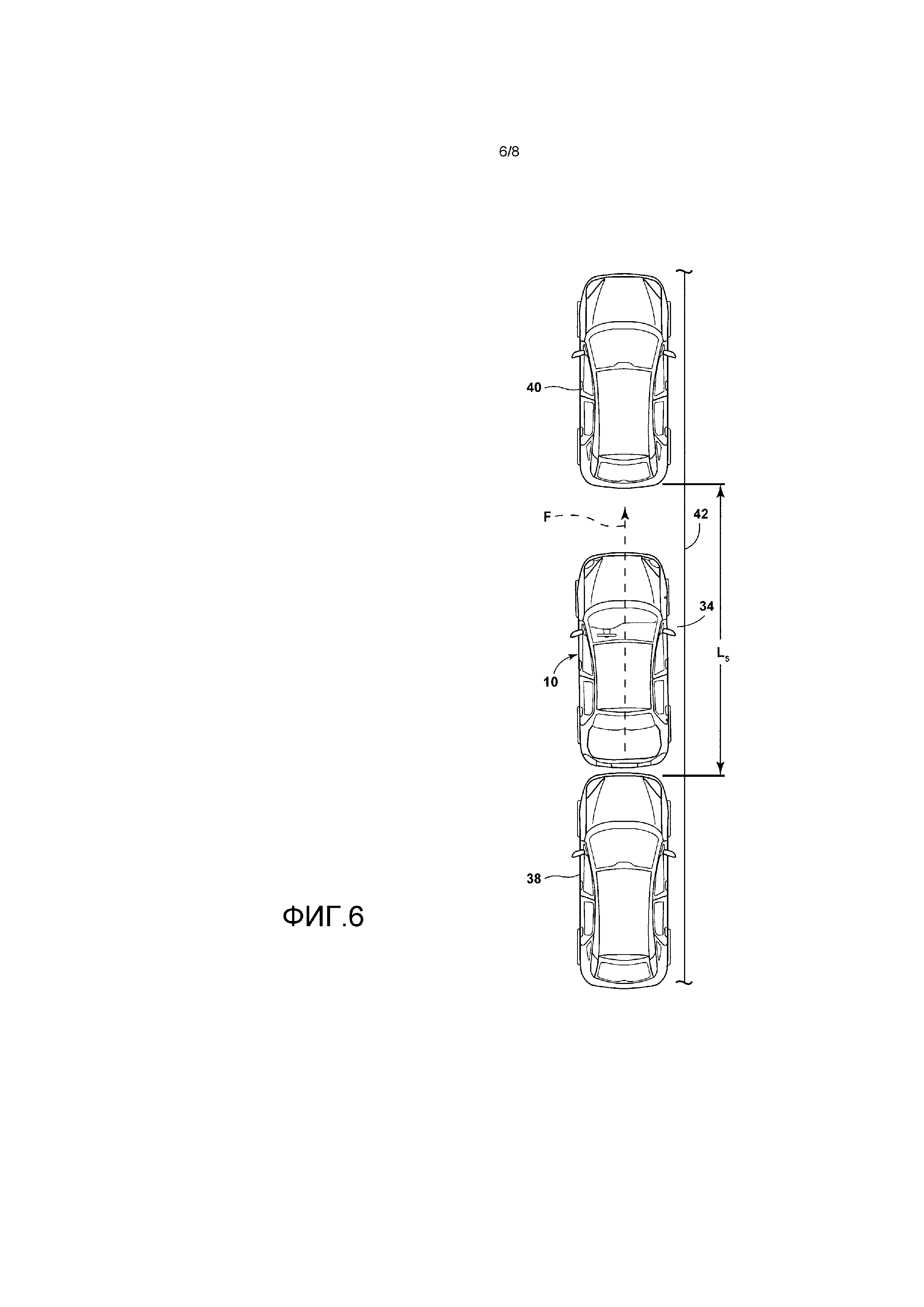
фиг.6 иллюстрирует направленный вперед маневр вдоль траектории в переднем направлении в пределах целевого места стоянки;
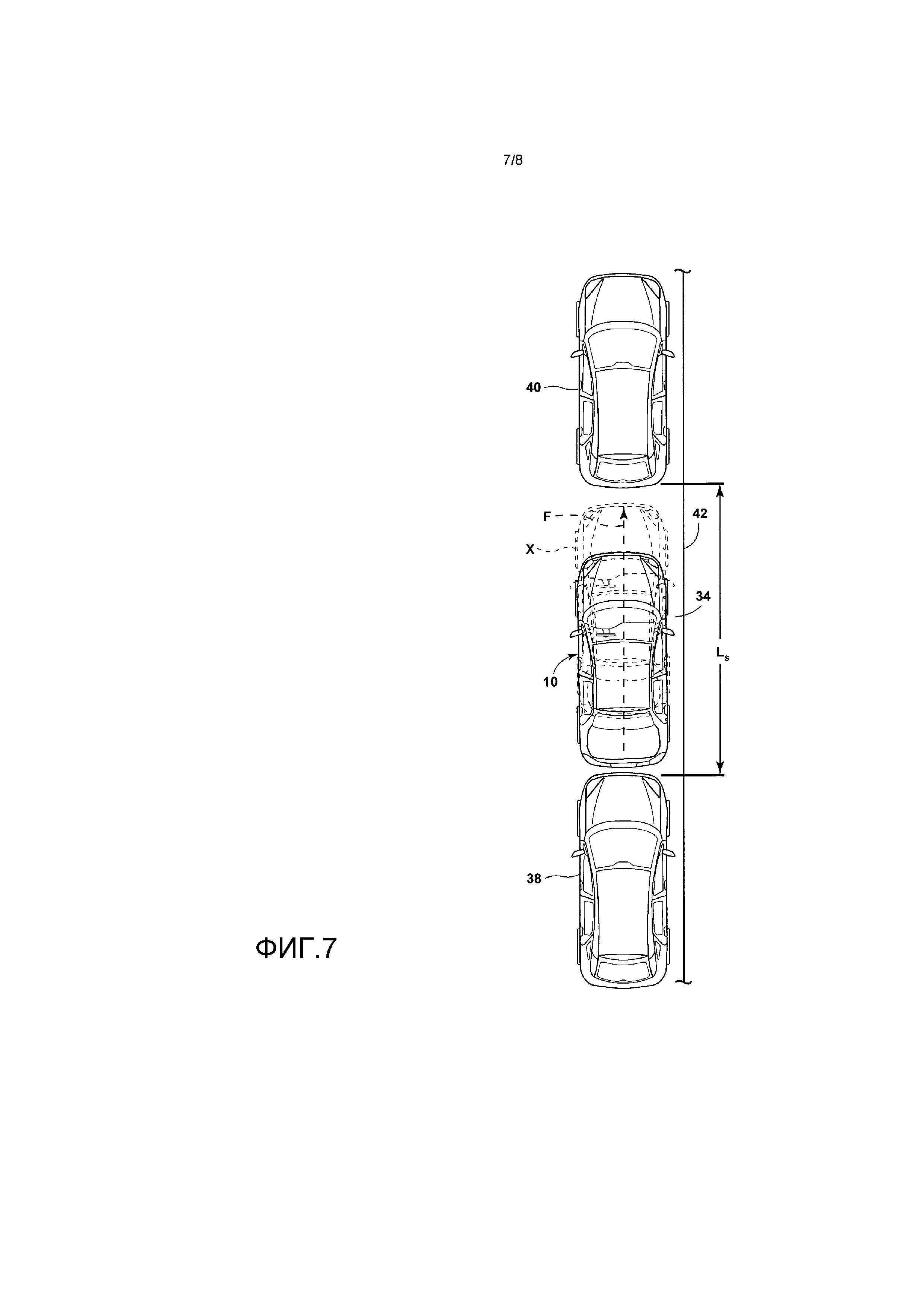
фиг.7 иллюстрирует конечное положение парковки транспортного средства в пределах целевого места стоянки; и
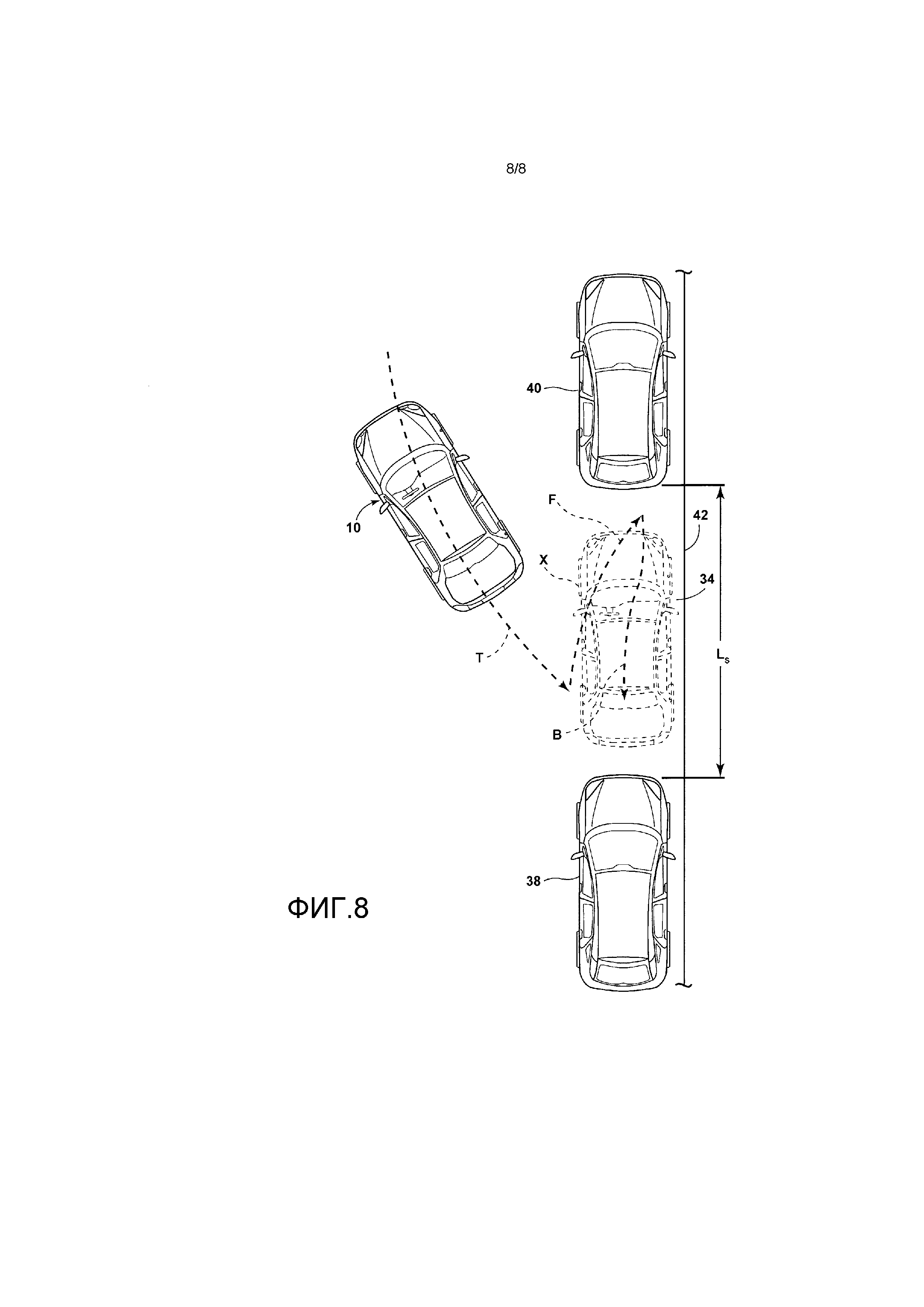
фиг.8 иллюстрирует несколько маневров для параллельной парковки транспортного средства в пределах целевого места стоянки.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Обращаясь к фиг.1, показана принципиальная схема транспортного средства 10 согласно одному из вариантов осуществления. Транспортное средство 10 включает в себя по меньшей мере следующее оборудование или системы: тормозную педаль 12, педаль 14 газа, тормозную систему 16, систему 18 рулевого управления, систему 20 привода на ведущие колеса, колеса 22, систему 24 рулевого управления с электрическим усилителем (EPAS), которая может быть частью системы 18 рулевого управления, сенсорную систему 26, систему 28 силовой передачи и систему 30 содействия парковке, имеющую процессор 32. В качестве альтернативы, система рулевого управления с усилителем с электрическим приводом может использоваться вместо системы 24 EPAS. Кроме того, транспортное средство 10, описанное в материалах настоящей заявки, может включать в себя другое пригодное оборудование или системы вместо описанных выше.
Обращаясь к фиг.2, показана принципиальная схема системы 31 для параллельной парковки транспортного средства 10 на целевое место 34 стоянки согласно одному из вариантов осуществления. В проиллюстрированном варианте осуществления сенсорная система 26 включает в себя ультразвуковые датчики S1-S8, расположенные по-разному на передней части, боковых сторонах и задней части транспортного средства 10. Однако следует учитывать, что количество и/или расположение ультразвуковых датчиков S1-S8 могут быть отличными от проиллюстрированного, если это необходимо. Сенсорная система 26 также включает в себя датчик S9 рулевого колеса, который может быть расположен на рулевом колесе 36 транспортного средства 10. Дополнительно или в качестве альтернативы, сенсорная система 26 может включать в себя радар, лазерный радар, камеры, лазеры, тепловые датчики, датчики GPS, одометрические датчики или их сочетание.
В действии, ультразвуковые датчики S1-S8 выполнены с возможностью обнаружения соседних объектов и их расположения относительно положения транспортного средства 10, когда транспортное средство 10 движется мимо объектов. В проиллюстрированном варианте осуществления, транспортное средство 10 движется по траектории P, а объекты соответствуют ограничивающему сзади объекту, показанному как припаркованное транспортное средство 38, ограничивающему спереди объекту, показанному в качестве припаркованного транспортного средства 40, и ограничивающему сбоку объекту, показанному в качестве бордюрного камня 42, все из которых могут обнаруживаться ультразвуковыми датчиками S1 и S2, когда транспортное средство 10 едет мимо них на низкой скорости. Процессор 32 системы 30 содействия парковке обрабатывает информацию, принятую с ультразвуковых датчиков S1 и S2, чтобы определять длину Ls участка целевого места 34 стоянки, а затем, определяет, достаточна ли длина Ls участка на основании известной длины Lv транспортного средства 10.
На практике, длина Ls участка может быть достаточной, если она достаточно велика, чтобы предоставлять транспортному средству 10 возможность парковаться параллельно в пределах целевого места 34 стоянки, не входя в контакт с объектами, обнаруженными ультразвуковыми датчиками S1-S8 транспортного средства 10. По определению, что длина Ls участка достаточна, процессор 32 вычисляет траекторию T управления направлением движения для парковки транспортного средства 10 на целевое место 34 стоянки на основании информации, принятой из одного или более компонентов сенсорной системы 26, и положения транспортного средства 10 относительно соседних объектов. Водитель транспортного средства 10 в таком случае может быть уведомлен, что маневр параллельной парковки может быть успешно выполнен на целевое место 34 стоянки, и проинструктирован, что следует остановить транспортное средство 10, чтобы начать маневр параллельной парковки. Уведомления водителю могут включать в себя наглядные уведомления, такие как текстовые сообщения, появляющиеся на устройстве отображения внутри транспортного средства 10, звуковые уведомления, тактильные уведомления и/или другие сенсорные уведомления.
В зависимости от длины Ls участка целевого места 34 стоянки, маневр параллельной парковки может выполняться по-разному в виде последовательности маневров. Такие маневры как правило включают в себя движение задним ходом транспортного средства 10 по траектории T управления направлением движения, остановку транспортного средства 10 вскоре в пределах целевого места 34 стоянки и перемещение транспортного средства назад и/или вперед в пределах целевого места 34 стоянки до остановки транспортного средства 10 в конечном положении 44 парковки. Как будет подробнее описано ниже, каждый маневр может выполняться полуавтономно при содействии водителя. Однако следует учитывать, что маневры также могут выполняться автономно в транспортных средствах, оснащенных такими функциональными возможностями. Таким образом, следует понимать, что способы и изображения, описанные ниже, приведены в отношении одной из возможных конфигураций транспортного средства и не должны рассматриваться как ограничивающие.
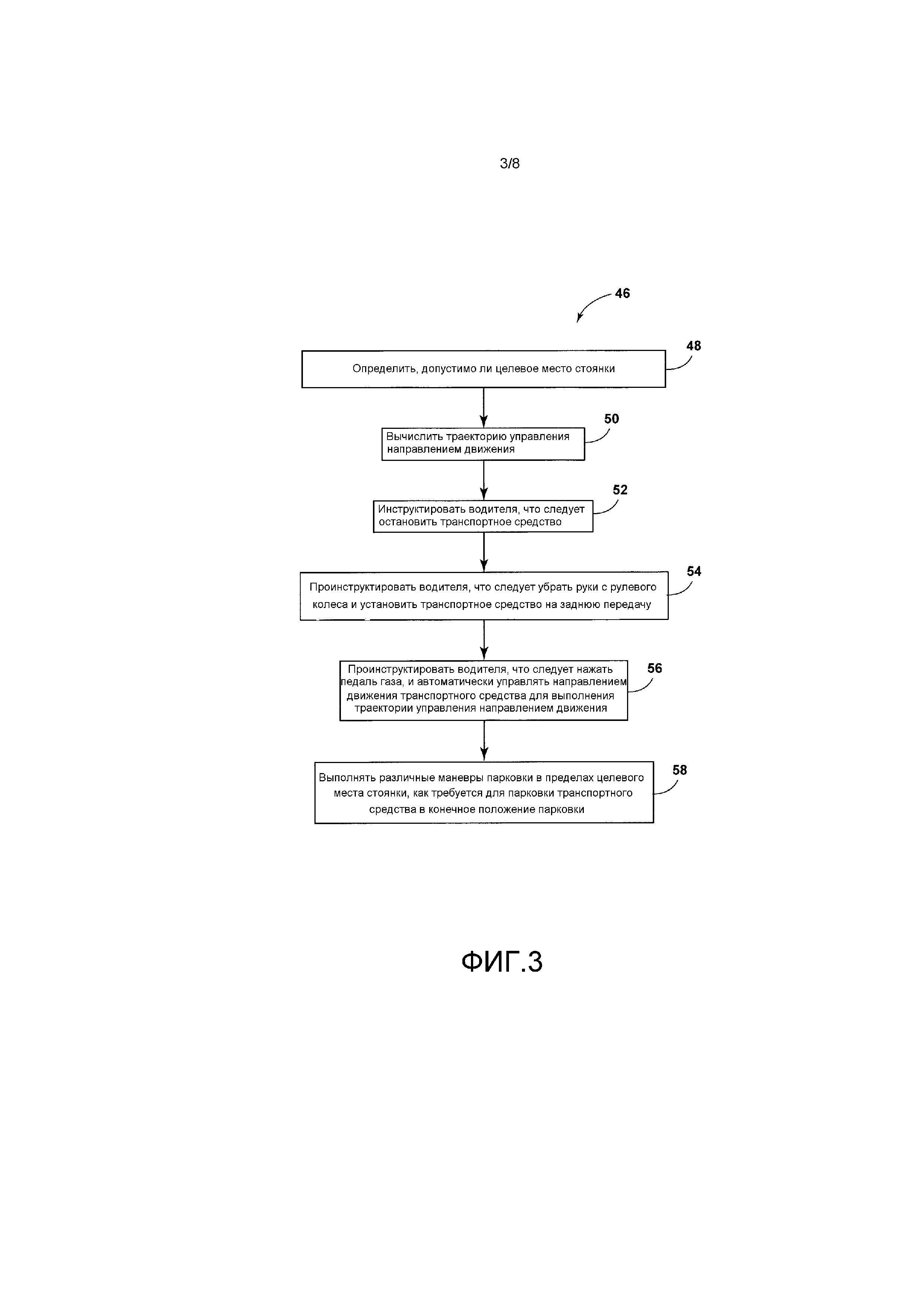
Со ссылкой на фиг.3 проиллюстрирована блок-схема способа варианта осуществления способа 46 для параллельной парковки транспортного средства 10 на целевое место 34 стоянки с использованием сенсорной системы 26 и системы 30 содействия парковке, описанных в материалах настоящей заявки. Как подробнее описано ниже, способ 46 параллельной парковки транспортного средства 10 может быть разбит на последовательность маневров, выполняемых с использованием системы 30 содействия парковке вместе с одним или более действий водителя. При таком маневре, система 30 содействия парковке принимает на себя управление направлением движения транспортного средства 10 и управляет скоростью, с которой перемещается транспортное средство 10, чтобы помочь гарантировать, что транспортное средство 10 успешно припарковано на целевое место 34 стоянки. Для обеспечения лучшего понимания, многообразие маневров показано на фиг.4-7 и будет упоминаться соответствующим образом при описании способа 46. На фиг.4-7, целевое место 34 стоянки описано как находящееся по правую сторону от транспортного средства 10. Однако следует учитывать, что сенсорная система 26 и система 30 содействия парковке могут применяться подобным образом при необходимости параллельной парковки на целевое место стоянки, расположенное по левую сторону от транспортного средства 10.
Способ 46 включает в себя этап 48, на котором система 30 содействия парковке определяет, допустимо ли целевое место 34 стоянки, или, иначе говоря, имеется ли в распоряжении достаточная длина Ls участка для парковки транспортного средства 10 на целевое место 34 стоянки. Если определено, что целевое место 34 стоянки допустимо, процессор 32 вычисляет траекторию T управления направлением движения на целевое место 34 стоянки на этапе 50, и водитель транспортного средства 10 инструктируется, что следует остановиться, на этапе 52. Как только транспортное средство 10 остановлено, водитель инструктируется, что следует убрать его или ее руки с рулевого колеса 36 и включить или переключить трансмиссию системы 28 силовой передачи на заднюю передачу на этапе 54. Затем, на этапе 56, водитель инструктируется, что следует нажать педаль 14 газа, и система 30 содействия парковке автоматически управляет направлением движения транспортного средства 10 для выполнения траектории T управления направлением движения (фиг.4).
Согласно одному из вариантов осуществления, транспортное средство 10 может двигаться задним ходом вдоль траектории T управления направлением движения на целевое место 34 стоянки с управляемой скоростью, основанной на угле поворота рулевого колеса, измеренном датчиком S9 рулевого колеса и выдаваемом в процессор 32 системы 30 содействия парковке. Например, система 30 содействия парковке может ограничивать скорость транспортного средства 10 первой скоростью, когда угол поворота рулевого колеса является меньшим, чем пороговый угол поворота рулевого колеса (например, 10 градусов), и второй скоростью, когда угол поворота рулевого колеса является равным или большим, чем пороговый угол поворота рулевого колеса. Вторая скорость может быть меньшей, чем первая скорость, так что транспортное средство 10 едет на меньшей скорости по частям траектории T управления направлением движения, которая имеет большую кривизну.
При выполнении этапа 56, транспортное средство будет находиться в пределах целевого места 34 стоянки, и система 30 содействия парковке будет выдавать инструкции водителю для выполнения различных маневров парковки в пределах целевого места 34 стоянки, как требуется для парковки транспортного средства 10 в конечном положении парковки, на этапе 58. Такие маневры могут включать в себя вождение транспортного средства 10 назад, вождение транспортного средства 10 вперед или их комбинацию. Конечное положение парковки может соответствовать припаркованному положению, в котором транспортное средство 10 находится параллельно и расположено на сходных расстояниях от ограничивающих сзади и спереди объектов, и при этом удалено на заданное расстояние от любого ограничивающего сбоку объекта. Когда транспортное средство 10 выполняет каждый маневр, система 30 содействия парковке управляет направлением движения транспортного средства 10 на управляемой скорости, определяемой на основании относительного положения ограничивающего сзади объекта и/или ограничивающего спереди объекта, при этом избегая столкновения с любыми ограничивающими сборку объектами. В целях иллюстрации, направленный назад маневр парковки и направленный вперед маневр парковки описаны ниже для парковки транспортного средства 10 на целевое место 34 стоянки, имеющее относительно большую длину Ls участка.
Как показано на фиг.5, водитель может продолжать сдавать назад транспортное средство 10 в пределах целевого места 34 стоянки вдоль направленной назад траектории B, когда система 30 содействия парковке продолжает автоматически управлять направлением движения транспортного средства 10. Когда транспортное средство 10 движется задним ходом в пределах целевого места 34 стоянки, система 30 содействия парковке может ограничивать скорость транспортного средства 10 третьей скоростью, которая может быть меньшей, чем первая и вторая скорость, если только ограничивающий сзади объект (например, припаркованное транспортное средство 38) не обнаружено или обнаружено на более чем первом расстоянии (например, 1 метра) от транспортного средства 10. Если ограничивающий сзади объект обнаружен на первом расстоянии или в пределах первого расстояния от транспортного средства 10, система 30 содействия парковке может ограничивать скорость транспортного средства 10 четвертой скоростью, которая является меньшей, чем третья скорость, чтобы обеспечивать отвечающее требованиям время, чтобы транспортное средство 10 останавливалось до столкновения с ограничивающим сзади объектом. В настоящем варианте осуществления, водитель может быть проинструктирован, что следует остановить транспортное средство 10, когда ограничивающий сзади объект обнаружен на некотором заданном расстоянии, меньшем, чем первое расстояние.
Как только транспортное средство 10 остановлено, водитель инструктируется, что следует переключить трансмиссию системы 28 силовой передачи на ведущую передачу и нажать на педаль 14 газа, тем самым перемещая транспортное средство 10 вперед вдоль направленной вперед траектории F, при этом система 30 содействия парковке продолжает автоматически управлять направлением движения транспортного средства 10, как показано на фиг.6. Когда транспортное средство 10 движется вперед в пределах целевого места 34 стоянки, система 30 содействия парковке может ограничивать скорость транспортного средства 10 пятой скоростью, которая может быть аналогичной третьей скорости, если только ограничивающий спереди объект (например, припаркованное транспортное средство 40) не обнаружено или обнаружено на более чем втором расстоянии (например, 1 м) от транспортного средства 10. Если ограничивающий спереди объект обнаружен на первом расстоянии или в пределах первого расстояния от транспортного средства 10, система 30 содействия парковке может ограничивать скорость транспортного средства 10 шестой скоростью, которая является меньшей, чем пятая скорость, и может быть аналогичной четвертой скорости, чтобы обеспечивать отвечающее требованиям время, чтобы транспортное средство 10 останавливалось до столкновения с ограничивающим спереди объектом. В настоящем варианте осуществления, водитель может быть проинструктирован, что следует остановить транспортное средство 10, когда ограничивающий спереди объект обнаружен на некотором заданном расстоянии, меньшем, чем второе расстояние, или когда транспортное средство 10 достигло конечного положения X парковки, как показано на фиг.7.
Хотя маневры парковки были описаны выше для параллельной парковки транспортного средства 10 на целевое место 34 стоянки, имеющее относительно большую длину Ls участка, следует учитывать, что в других случаях может требоваться иной порядок маневров для парковки. Например, если целевое место 34 стоянки имеет относительно небольшую длину Ls участка, может быть необходимо перемещать транспортное средство 10 вперед по вхождению на целевое место 34 стоянки, с последующим перемещением назад до того, как транспортное средство 10 способно достигнуть конечного положения парковки. Например, фиг.8 иллюстрирует маневр параллельной парковки, в котором транспортное средство сначала движется задним ходом по траектории T управления направлением движения с последующим направленным вперед маневром вдоль траектории F в переднем направлении, а затем направленным назад маневром по траектории B в заднем направлении до того, как транспортное средство 10 останавливается в конечном положении X парковки.
Соответственно, система и способ параллельной парковки транспортного средства на целевое место были описаны в материалах настоящей заявки на основании применения многочисленных маневров автономного управления направлением движения на управляемых по скорости этапах, чтобы гарантировать, что транспортное средство успешно припарковано в конечном положении парковки. В результате последовательность операций параллельной парковки сильно упрощена.
Следует понимать, что в описанной выше конструкции могут быть выполнены изменения и модификации, не выходящие за рамки концепций настоящего изобретения, а кроме того следует понимать, что такие концепции подразумеваются охваченными нижеследующей формулой изобретения, если формулировка формулы изобретения явным образом не указывает на иное.
Транспортное средство (варианты) и способ предупреждения о столкновении транспортного средства на основе времени до столкновения
Система хранения для транспортного средства, багажное отделение для транспортного средства и транспортное средство
Узел направляющей ремня безопасности, сиденье транспортного средства, узел ремня безопасности и транспортное средство (варианты)
Сигнальный беспилотный аппарат для автомобиля
Узел подлокотника транспортного средства и способ обеспечения опоры для поворачиваемого подлокотника в транспортном средстве
Кузов транспортного средства с пассажирской кабиной и система вытяжного вентилятора для кабины транспортного средства
Способ и система для защиты транспортного средства
Узел надувной подушки безопасности (варианты)
Активный буфер для автомобиля (варианты)
Осветительное устройство и система освещения для транспортного средства
Транспортное средство, система напоминания о перестановке шин и способ для выявления интервала обслуживания шин для транспортного средства
Управление транспортным средством для автоматического выезда с места стоянки автомобилей
Система и способ параллельной парковки транспортного средства
Система содействия парковке транспортного средства и способ парковки

