Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ПАРАЛЛЕЛЬНОЙ ПАРКОВКИ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение в общем относится к системам помощи при парковке транспортного средства, и, в частности, к улучшенной системе помощи при парковке и способу параллельной парковки транспортного средства.
Уровень техники изобретения
[0002] Параллельная парковка транспортного средства может быть сложной для многих водителей. Таким образом, имеется необходимость системы помощи при парковке транспортного средства, которая может выполнять маневр параллельной парковки на целевое парковочное место с минимальным требуемым действием водителя при удовлетворении уровней комфорта водителя.
Сущность изобретения
[0003] Согласно одному аспекту настоящего изобретения обеспечена система параллельной парковки транспортного средства на целевое парковочное место. Система включает в себя пользовательское устройство ввода, через которое осуществляются один или более выборов параметров парковки. Система также включает в себя систему помощи при парковке для автоматического управления транспортным средством во время выполнения маневра параллельной парковки, причем маневр параллельной парковки регулируется одним или более выборами параметров парковки.
[0004] Согласно другому аспекту настоящего изобретения обеспечена система параллельной парковки транспортного средства на целевое парковочное место. Система включает в себя дисплей для отображения выбираемых параметров парковки и пользовательское устройство ввода, через которое осуществляются один или более выборов параметров парковки. Система также включает в себя систему помощи при парковке для автоматического управления транспортным средством во время выполнения маневра параллельной парковки, причем маневр параллельной парковки регулируется одним или более выборами параметров парковки.
[0005] Согласно еще одному аспекту настоящего изобретения обеспечен способ параллельной парковки транспортного средства на целевое парковочное место. Причем способ содержит этапы, на которых: отображают выбираемые параметры парковки на дисплее; осуществляют один или более выборов параметров парковки посредством пользовательского устройства ввода; и автоматически управляют транспортным средством во время выполнения маневра параллельной парковки, регулируемого одним или более выборами параметров парковки.
Предлагается система параллельной парковки транспортного средства на целевое парковочное место, содержащая: пользовательское устройство ввода, через которое осуществляются один или более выборов параметров парковки; и систему помощи при парковке для автоматического управления транспортным средством во время выполнения маневра параллельной парковки, причем маневр параллельной парковки регулируется одним или более выборами параметров парковки. Причем пользовательское устройство ввода содержит дисплей для отображения выбираемых параметров парковки. Причем дисплей содержит сенсорный экран, выполненный с возможностью регистрации одного или более событий касания для осуществления одного или более выборов параметров парковки. Причем пользовательское устройство ввода содержит по меньшей мере один выбранный элемент из ползунка, вращающейся ручки и одной или более кнопок. Причем один или более выборов параметров парковки накладывают ограничения на скорость транспортного средства и/или предотвращение столкновения с объектом при выполнении транспортным средством маневра параллельной парковки. Причем один или более выборов параметров парковки содержат первый выбор уровня скорости транспортного средства или второй выбор уровня скорости транспортного средства, причем первый выбор уровня скорости ограничивает допустимую скорость транспортного средства первой скоростью при выполнении маневра параллельной парковки, а второй уровень скорости транспортного средства ограничивает допустимую скорость транспортного средства второй скоростью при выполнении маневра параллельной парковки, причем первая скорость меньше, чем вторая скорость. Причем один или более выборов параметров парковки содержат первый выбор уровня предотвращения столкновения с объектом и второй выбор уровня предотвращения столкновения с объектом, причем первый выбор уровня предотвращения столкновения с объектом ограничивает допустимое расстояние между транспортным средством и ограничивающим объектом, расположенным вблизи целевого парковочного места, первым расстоянием, а второй выбор уровня предотвращения столкновения с объектом ограничивает допустимое расстояние между транспортным средством и ограничивающим объектом вторым расстоянием, причем первое расстояние больше, чем второе расстояние. Причем ограничивающий объект представляет собой один из переднего ограничивающего объекта, заднего ограничивающего объекта и бокового ограничивающего объекта.
Также предлагается система параллельной парковки транспортного средства на целевое парковочное место, содержащая:
дисплей для отображения выбираемых параметров парковки; пользовательское устройство ввода, через которое осуществляются один или более выборов параметров парковки; и систему помощи при парковке для автоматического управления транспортным средством во время выполнения маневра параллельной парковки, причем маневр параллельной парковки регулируется одним или более выборами параметров парковки. Причем дисплей содержит сенсорный экран, выполненный с возможностью регистрации одного или более событий касания для осуществления одного или более выборов параметров парковки. Причем пользовательское устройство ввода содержит по меньшей мере один выбранный элемент из ползунка, вращающейся ручки и одной или более кнопок. Причем один или более выборов параметров парковки накладывают ограничения на скорость транспортного средства и/или предотвращение столкновения с объектом при выполнении транспортным средством маневра параллельной парковки. Причем один или более выборов параметров парковки содержат первый выбор уровня скорости транспортного средства или второй выбор уровня скорости транспортного средства, причем первый выбор уровня скорости транспортного средства ограничивает допустимую скорость транспортного средства первой скоростью, а второй выбор уровня скорости транспортного средства ограничивает допустимую скорость транспортного средства второй скоростью, причем первая скорость меньше, чем вторая скорость. Причем один или более выборов параметров парковки содержат первый выбор уровня предотвращения столкновения с объектом и второй выбор уровня предотвращения столкновения с объектом, причем первый выбор уровня предотвращения столкновения с объектом ограничивает допустимое расстояние между транспортным средством и ограничивающим объектом, расположенным вблизи целевого парковочного места, первым расстоянием, а второй выбор уровня предотвращения столкновения с объектом ограничивает допустимое расстояние между транспортным средством и ограничивающим объектом вторым расстоянием, причем первое расстояние больше, чем второе расстояние. Причем ограничивающий объект представляет собой один из переднего ограничивающего объекта, заднего ограничивающего объекта и бокового ограничивающего объекта.
Также предлагается способ параллельной парковки транспортного средства на целевое парковочное место, содержащий этапы, на которых: отображают выбираемые параметры парковки на дисплее; осуществляют один или более выборов параметров парковки посредством пользовательского устройства ввода; и автоматически управляют транспортным средством во время выполнения маневра параллельной парковки, регулируемого одним или более выборами параметров парковки. Причем этап осуществления выбора содержит этап, на котором регистрируют одно или более событий касания для того, чтобы осуществлять один или более выборов параметров, причем один или более выборов параметров относится к скорости транспортного средства и/или предотвращению столкновения с объектом. Причем этап осуществления выбора содержит этап, на котором осуществляют выбор уровня скорости транспортного средства для ограничения допустимой скорости транспортного средства. Причем этап осуществления выбора, содержит этап, на котором осуществляют выбор уровня предотвращения столкновения с объектом для ограничения допустимого расстояния между транспортным средством и ограничивающим объектом, расположенным вблизи целевого парковочного места. Причем ограничивающий объект представляет собой один из переднего ограничивающего объекта, заднего ограничивающего объекта и бокового ограничивающего объекта.
[0006] Эти и другие аспекты, задачи и признаки настоящего изобретения будут понятны и приняты во внимание специалистом в области техники при изучении следующего далее описания, формулы изобретения и приложенных чертежей.
Краткое описание чертежей
[0007] На чертежах:
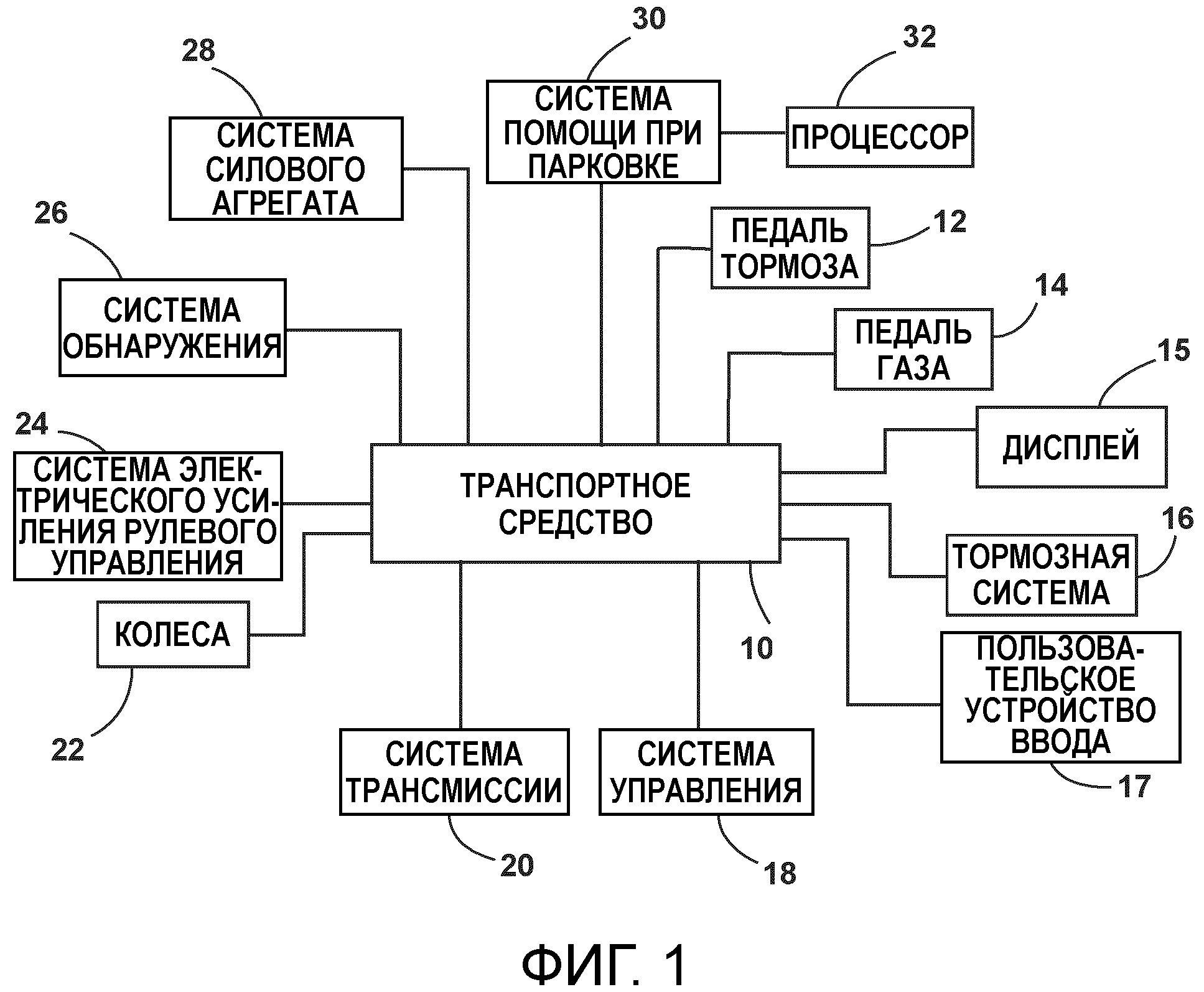
[0008] Фиг.1 иллюстрирует схематическое изображение транспортного средства согласно одному варианту выполнения;
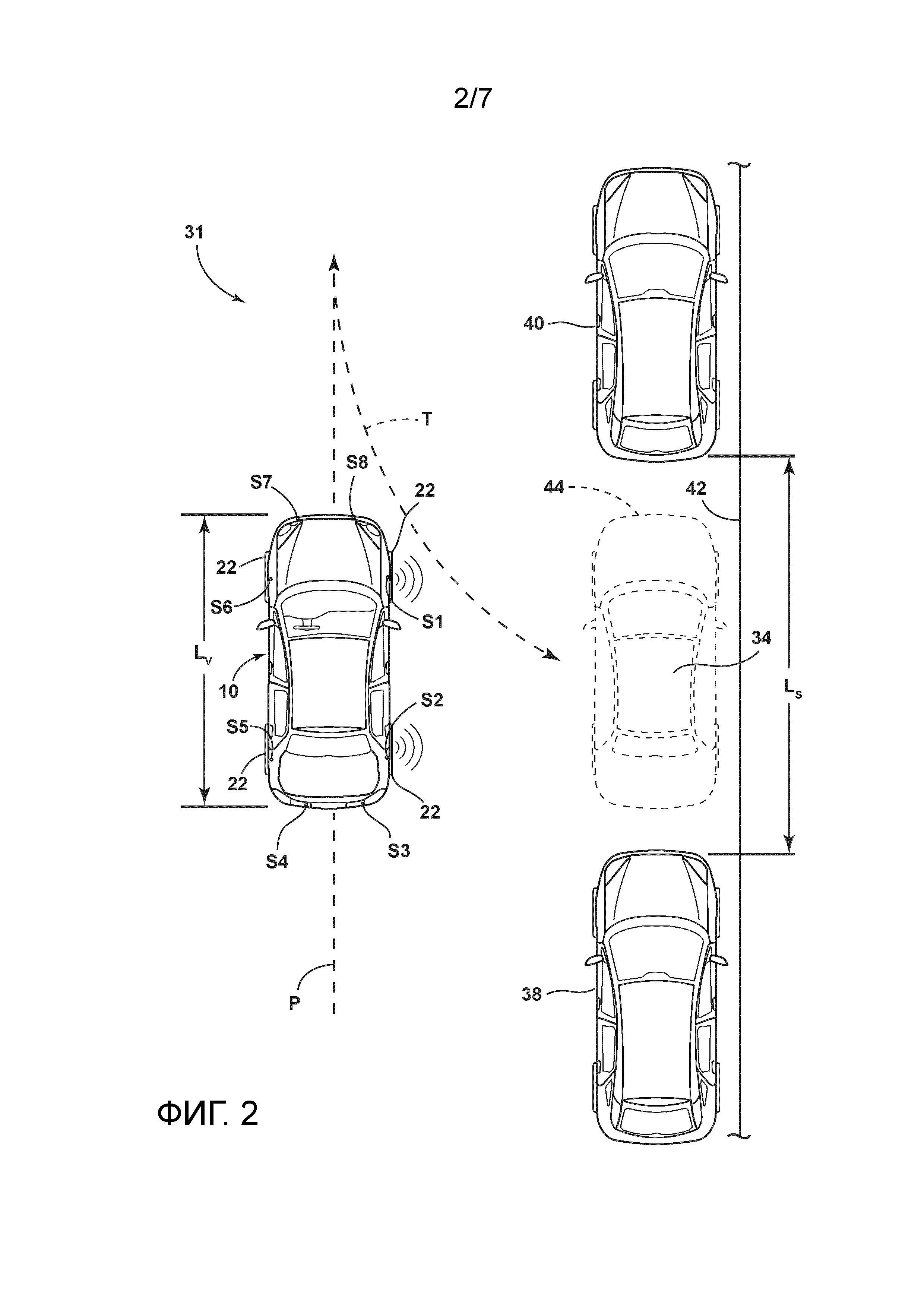
[0009] Фиг.2 иллюстрирует схематическое изображение транспортного средства и траектории управления для заднего хода транспортного средства на целевое парковочное место, ограниченное объектами, согласно одному варианту выполнения;
[0010] Фиг.3 иллюстрирует блок-схему способа параллельной парковки транспортного средства на целевое парковочное место согласно одному варианту выполнения;
[0011] Фиг.4 иллюстрирует схематическое изображение транспортного средства и траектории управления для заднего хода транспортного средства на целевое парковочное место, ограниченное объектами, согласно одному варианту выполнения;
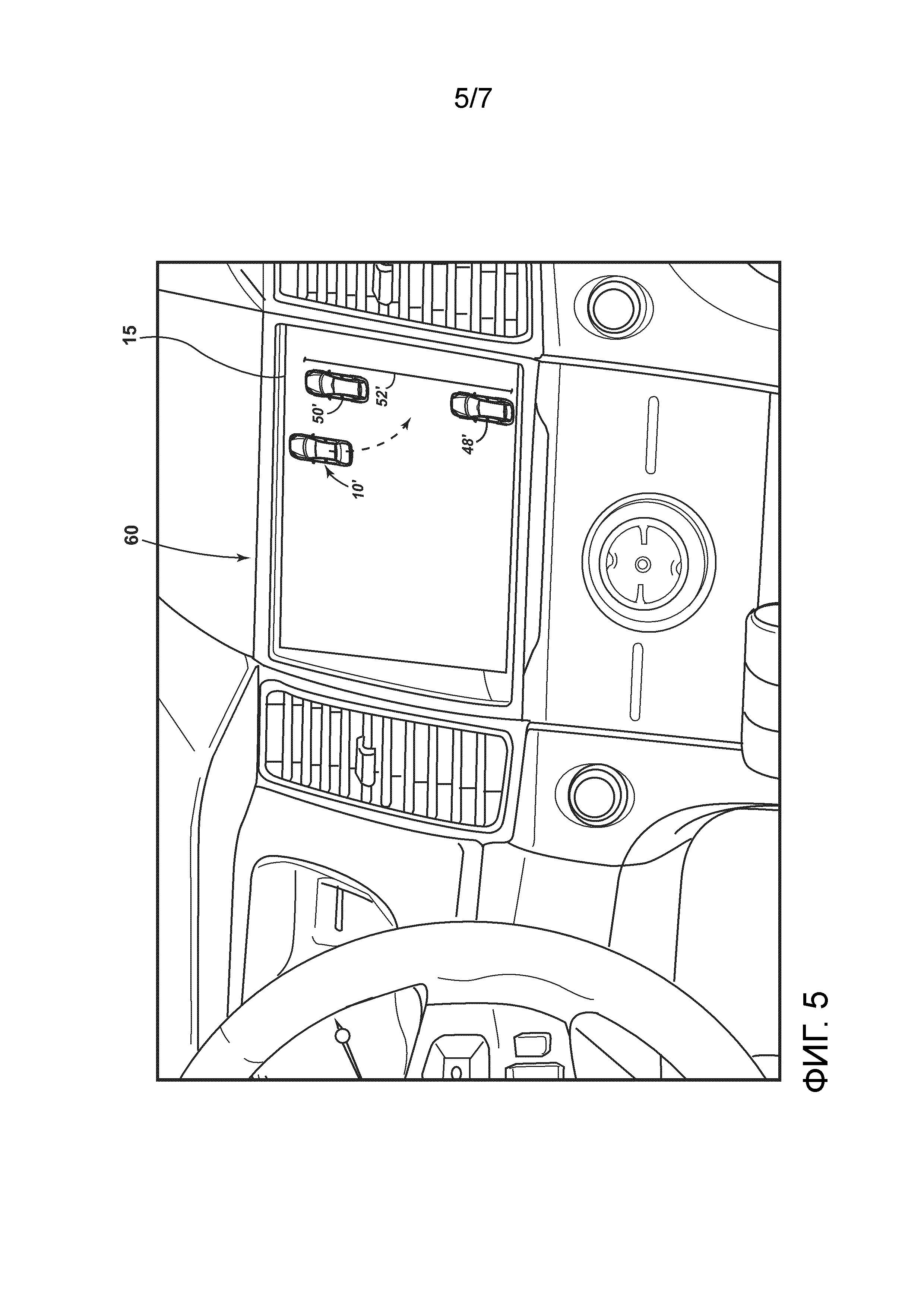
[0012] Фиг.5 иллюстрирует дисплей, на котором создается модель парковки, согласно одному варианту выполнения;
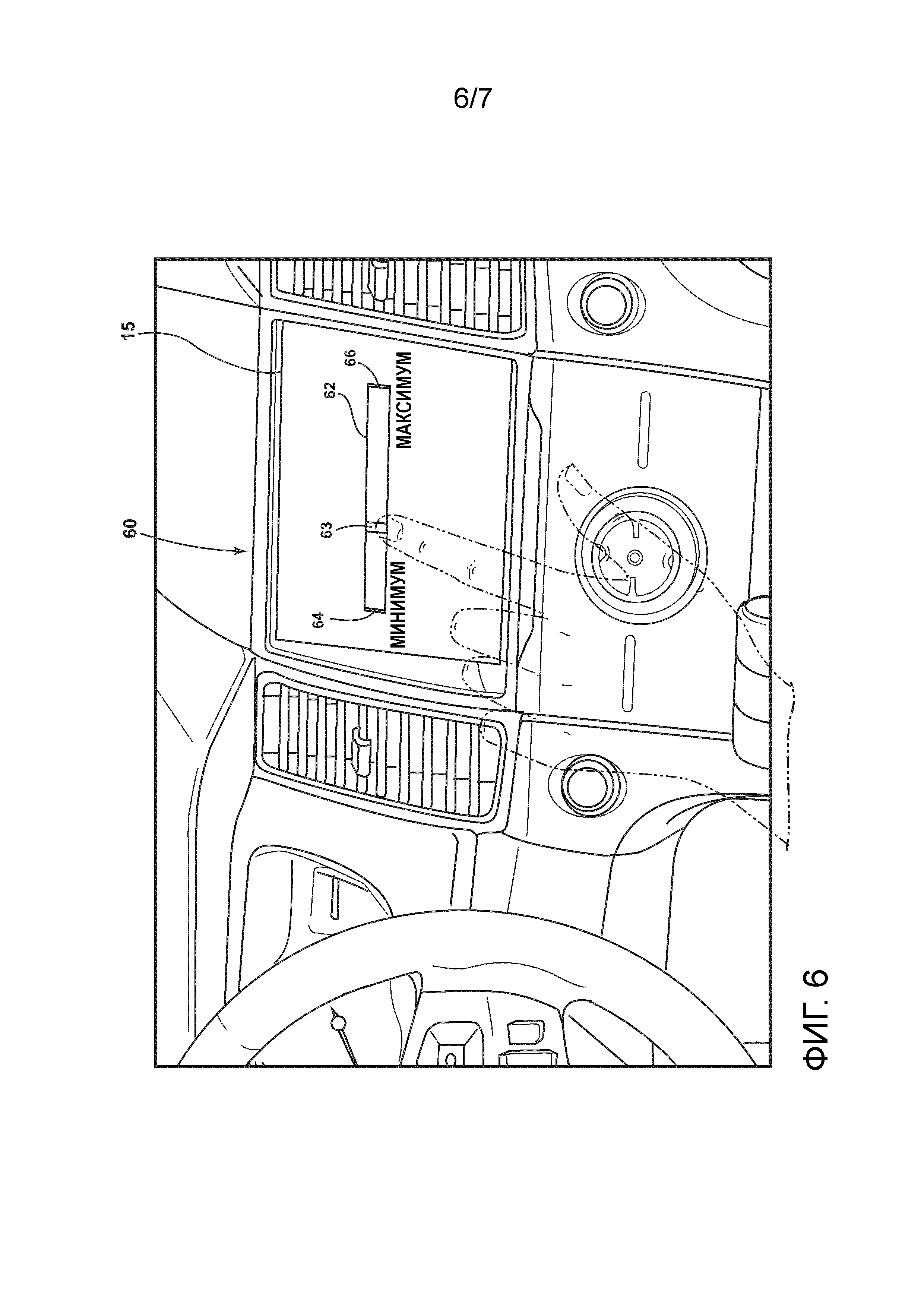
[0013] Фиг.6 иллюстрирует событие касания для осуществления выбора параметра парковки согласно одному варианту выполнения; и
[0014] Фиг.7 иллюстрирует дисплей, на котором параметры парковки показаны в качестве опций меню.
Подробное описание предпочтительных вариантов выполнения
[0015] Как требуется, подробные варианты выполнения настоящего раскрытия раскрыты здесь. Однако должно быть понятно, что раскрытые варианты выполнения являются только примером раскрытия, которое может быть выполнено в различных и альтернативных формах. Фигуры необязательно подробно раскрывают конструкцию, и некоторые схемы могут быть увеличены или уменьшены для демонстрации обзора их функции. В связи с этим конкретные конструктивные и функциональные детали, раскрытые здесь, не должны интерпретироваться как ограничивающие, а только как представляющие основу для изучения специалистом в области техники различного применения настоящего раскрытия.
[0016] В данном контексте выражение «и/или» при использовании в списке из двух или более элементов означает, что любой один из перечисленных элементов может быть применен сам по себе, или может быть применена любая совокупность двух или более перечисленных элементов. Например, если композиция описана как содержащая компоненты A, B и/или C, композиция может содержать один A; один B; один C; A и B в совокупности; A и C в совокупности; B и C в совокупности; или A, B и C в совокупности.
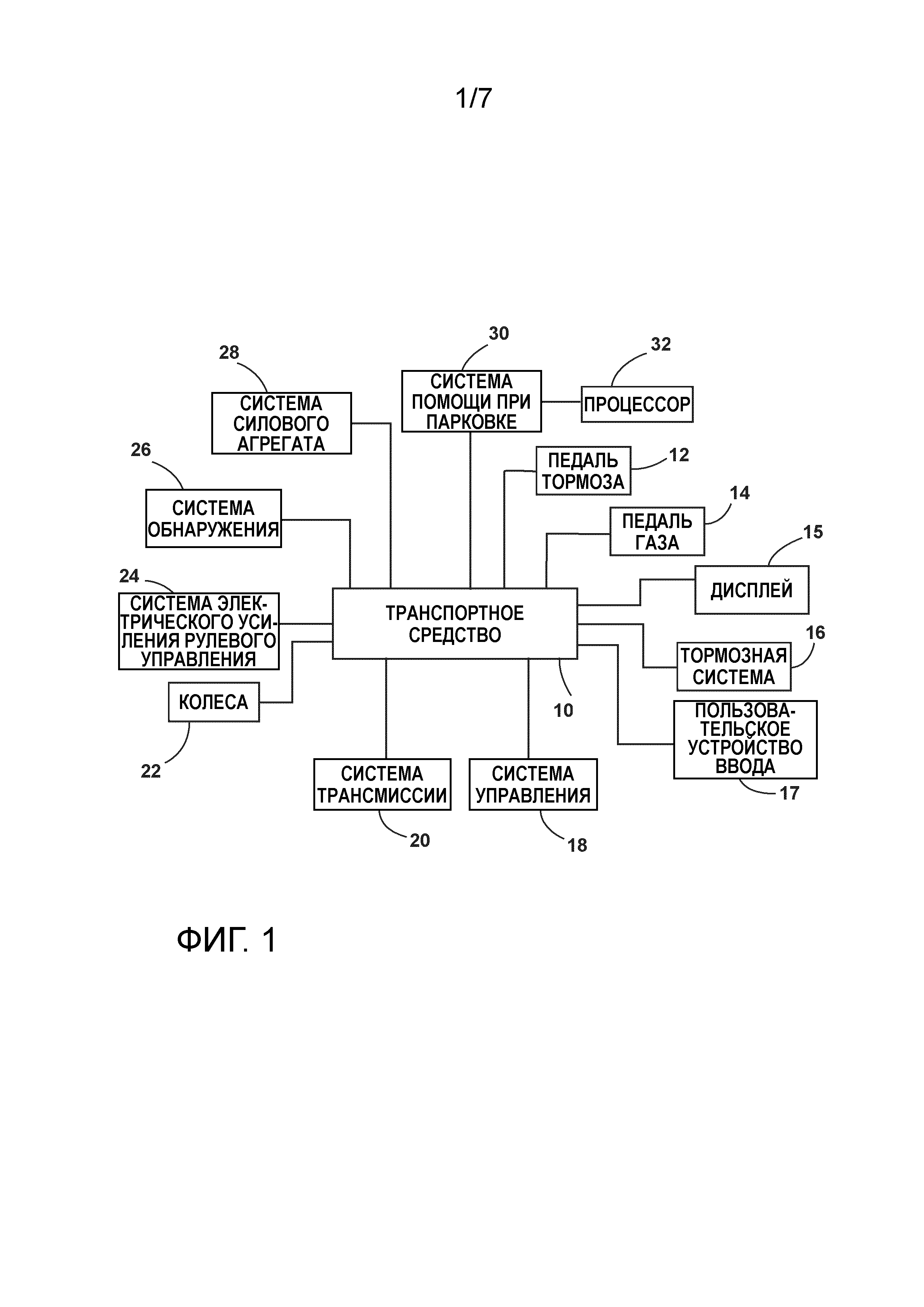
[0017] На Фиг.1 показано схематическое изображение транспортного средства 10 согласно одному варианту выполнения. Транспортное средство 10 включает в себя по меньшей мере следующее оборудование или системы: педаль 12 тормоза, педаль 14 газа, дисплей 15, тормозная система 16, пользовательское устройство 17 ввода, система 18 управления, система 20 трансмиссии, колеса 22, система 24 электрического усиления рулевого управления (EPAS), система 26 обнаружения, система 28 силового агрегата и система 30 помощи при парковке, имеющая процессор 32. Альтернативно система электронного усиления рулевого управления (не показана) может быть использована вместо системы 24 EPAS. Дополнительно транспортное средство 10, описанное здесь, может включать в себя другое подходящее оборудование или системы вместо тех, которые описаны выше.
[0018] На Фиг.2 показано схематическое изображение системы 31 параллельной парковки транспортного средства 10 на целевое парковочное место 34 согласно одному варианту выполнения. В проиллюстрированном варианте выполнения система 26 обнаружения включает в себя ультразвуковые датчики S1-S8, расположенные различным образом на передней стороне, боковых сторонах и задней стороне транспортного средства 10. Однако должно быть принято во внимание, что количество и/или местоположение ультразвуковых датчиков S1-S8 могут быть отличны от проиллюстрированных, если это необходимо. Дополнительно или альтернативно система 26 обнаружения может включать в себя радиолокатор, лазерный локатор, камеры, лазеры, тепловые датчики, датчики GPS, одометрические датчики или их совокупность.
[0019] При работе ультразвуковые датчики S1-S8 выполнены с возможностью обнаружения близлежащих объектов и их местоположения относительно положения транспортного средства 10, при этом транспортное средство 10 приводится в движение, минуя объекты. В проиллюстрированном варианте выполнения транспортное средство 10 приводится в движение вдоль пути P, и объекты соответствуют заднему ограничивающему объекту, показанному в виде припаркованного транспортного средства 38, переднему ограничивающему объекту, показанному в виде припаркованного транспортного средства 40, и боковому ограничивающему объекту, показанному в виде бордюра 42, все из которых могут быть обнаружены ультразвуковыми датчиками S1 и S2, при этом транспортное средство 10 приводится в движение, минуя их на медленной скорости. Процессор 32 системы 30 помощи при парковке обрабатывает информацию, принимаемую от ультразвуковых датчиков S1 и S2, для определения длины Ls области целевого парковочного места 34, и далее определения, является ли достаточной длина Ls области на основании известной длины Lv транспортного средства 10.
[0020] В общем длина Ls области достаточна, если она больше, чем длина Lv транспортного средства 10. Предпочтительно длина Ls области обеспечивает достаточное место, чтобы позволять параллельную парковку транспортного средства 10 на целевом парковочном месте 34 без контакта с объектами, обнаруженными ультразвуковыми датчиками S1-S8 транспортного средства 10. Однако в некоторых примерах может требоваться контакт транспортного средства 10 с объектом для того, чтобы парковаться на целевом парковочном месте 34. Например, колеса 22 транспортного средства 10 могут входить в контакт с бордюром 42. При определении того, что длина Ls области является достаточной, процессор 32 вычисляет траекторию T управления для парковки транспортного средства 10 на целевое парковочное место 34 на основании информации, принимаемой от одного или более компонентов системы 76 обнаружения, и положения транспортного средства 10 относительно близлежащих объектов. Водитель транспортного средства 10 далее может получать уведомление о том, что маневр параллельной парковки может быть успешно выполнен на целевое парковочное место 34, и получать инструкцию для остановки транспортного средства 10 для начала маневра параллельной парковки. Уведомления водителя могут включать в себя визуальные уведомления, такие как текстовые сообщения, появляющиеся на дисплее внутри транспортного средства 10, звуковые уведомления, тактильные уведомления и/или другие воспринимаемые уведомления.
[0021] В зависимости от длины Ls области целевого парковочного места 34 маневр параллельной парковки может быть выполнен различным образом в виде последовательности маневров. Такие маневры в общем включают в себя задний ход транспортного средства 10 вдоль траектории T управления, короткую остановку транспортного средства 10 на целевом парковочном месте 34 и перемещение транспортного средства 10 назад и/или вперед на целевом парковочном месте 34 до остановки транспортного средства 10 в конечном парковочном положении 44. Как будет описано более подробно ниже, каждый маневр может быть выполнен полуавтономно с помощью водителя. Однако должно быть принято во внимание, что маневры также могут быть выполнены автономно в транспортных средствах, оборудованных такими функциональными возможностями. Таким образом, должно быть понятно, что способы и изображения, описанные ниже, обеспечены в отношении одной возможной конфигурации транспортного средства и не должны рассматриваться как ограничивающие.
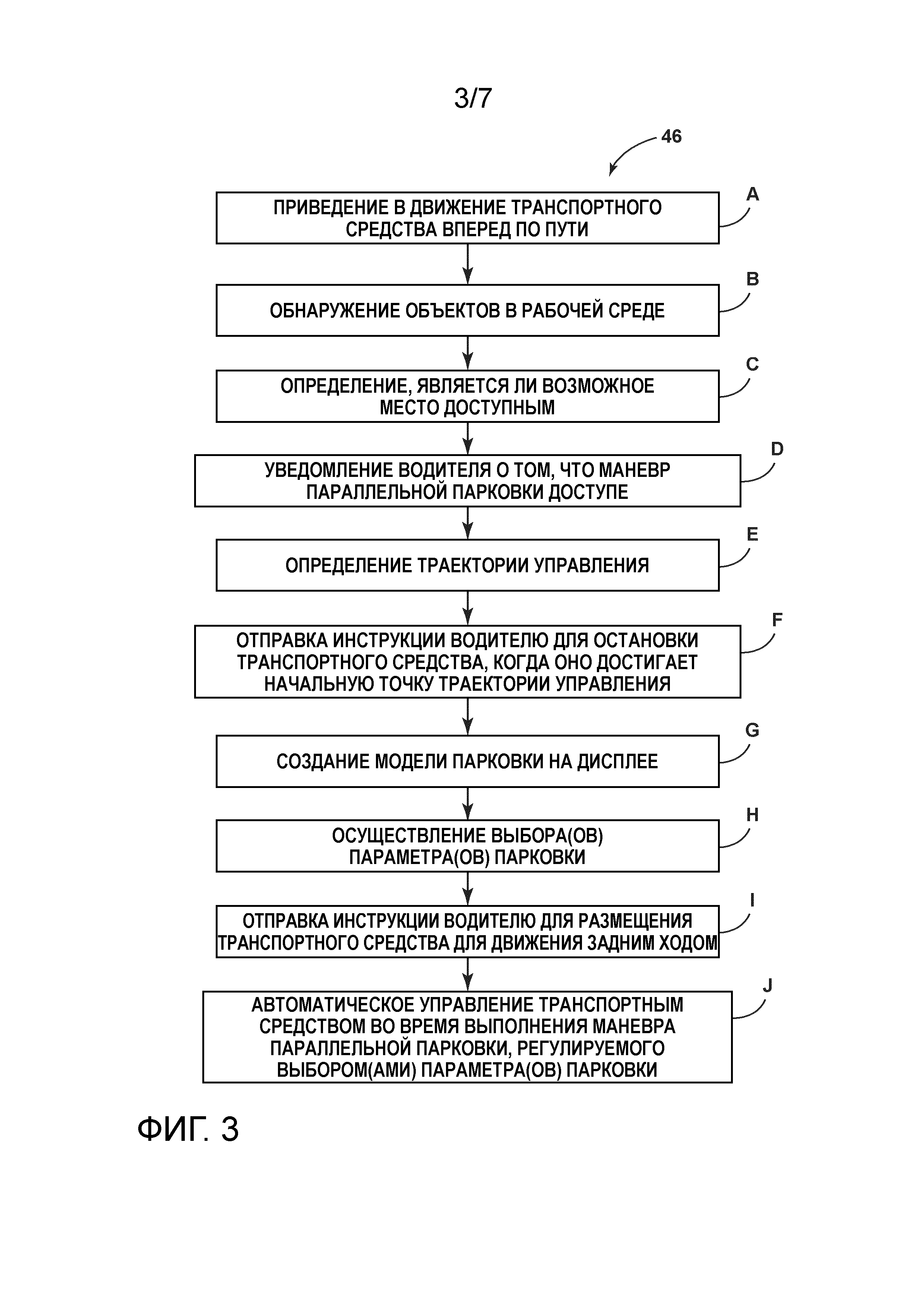
[0022] На Фиг.3 показана блок-схема способа 46 параллельной парковки транспортного средства 10 на целевое парковочное место 34 согласно одному варианту выполнения. Способ 46 может быть выполнен с использованием транспортного средства 10 и связанных компонентов, описанных ранее. В целях иллюстрации различные этапы способа 46 будут описаны со ссылкой Фиг.4-7, которые иллюстрируют сценарии, связанные с одним вариантом выполнения маневра параллельной парковки. Маневр параллельной парковки описан ниже, как выполняемый вправо от транспортного средства 10. Однако должно быть принято во внимание, что подобные парковочные маневры могут быть выполнены влево от транспортного средства 10 путем использования описанного здесь способа 46. Более того, хотя этапы способа 46 показаны линейно на Фиг.3, должно быть принято во внимание, что некоторые этапы могут быть выполнены в другом порядке и/или одновременно с другими этапами.
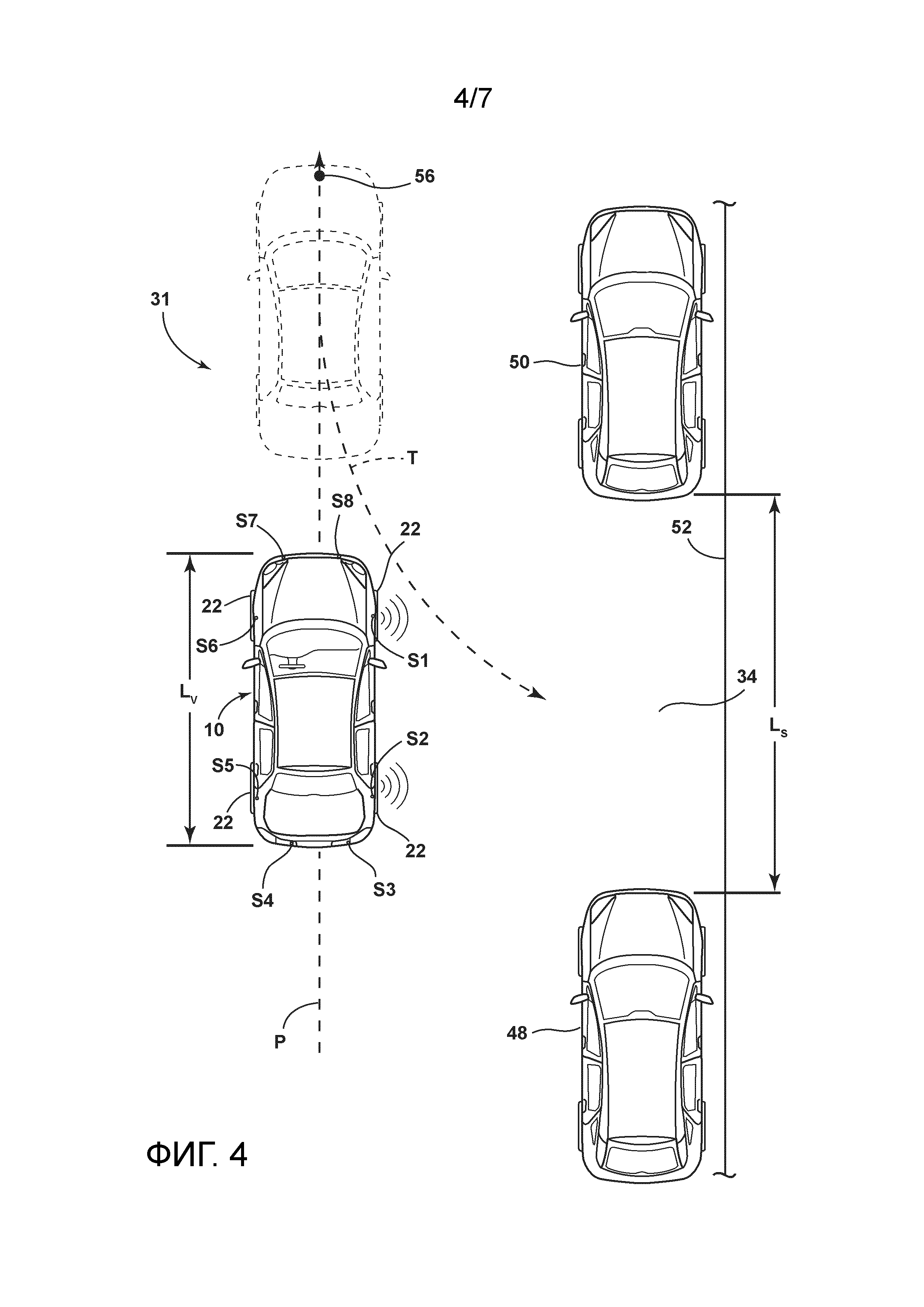
[0023] Способ 46 включает в себя этапы A и B, на которых транспортное средство 10 приводится в движение вперед вдоль пути P, при этом система 26 обнаружения транспортного средства 10 обнаруживает наличие объектов в рабочей среде 48 транспортного средства 10. Например, на Фиг.4 ультразвуковые датчики S1-S8 транспортного средства 10 могут обнаруживать задний ограничивающий объект, который показан в виде транспортного средства 48, передний ограничивающий объект, который показан в виде транспортного средства 50, и боковой ограничивающий объект, который показан в виде бордюра 52. Когда объекты обнаружены, система 30 помощи при парковке транспортного средства 10 может определять, является ли возможное парковочное место доступным на этапе C. Например, система 30 помощи при парковке может определять, что место 54 представляет собой возможной парковочное место на основании его длины Ls области. Когда возможное парковочное место найдено, водитель транспортного средства 10 может быть уведомлен о том, что маневр параллельной парковки доступен на этапе D.
[0024] Дополнительно на Фиг.4 система 30 помощи при парковке определяет траекторию T управления на этапе C для заднего хода транспортного средства 10 на целевое парковочное место (например, место 54), а также может обеспечивать инструкцию водителю для приведения в движение транспортного средства 10 вперед, пока транспортное средство 10 не достигнет начальной точки 56 траектории T управления такой, что транспортное средство 10 может быть успешно приведено в движение задним ходом вдоль траектории T управления. На этапе F водитель получает инструкцию для остановки транспортного средства 10, когда оно достигает начальную точку 56. На этапе G система 30 помощи при парковке может создавать модель парковки, показывающую транспортное средство 10 относительно обнаруженных объектов и целевого парковочного места. Например, на Фиг.5 модель парковки 58 может быть создана на дисплее 15 транспортного средства 10. Дисплей 15 может быть расположен в центральной консоли 60 транспортного средства 10, и модель 10' транспортного средства может быть использована для представления транспортного средства 10. Подобным образом модели 48', 50' и 52' объектов могут быть использованы для представления транспортного средства 48, транспортного средства 50 и бордюра 52, которые соответствуют обнаруженным заднему, переднему и боковому ограничивающим объектам, показанным ранее на Фиг.4. Если требуется, дисплей 15 также может показывать траекторию T управления.
[0025] На этапе H водитель может осуществлять один или более выборов параметров парковки посредством пользовательского устройства 17 ввода для управления манерой, при которой выполняется маневр параллельной парковки. Как описано ниже, выборы параметров парковки могут накладывать ограничения на уровень скорости транспортного средства и уровень предотвращения столкновения с объектом, когда транспортное средство 10 выполняет маневр задним ходом. Пользовательское устройство 17 ввода может включать в себя сенсорный экран дисплея 15, выполненный с возможностью отображения выбираемых параметров парковки и регистрации одного или более событий касания для осуществления выбора(ов) параметра(ов) парковки. Например, водитель может касаться модели 10' транспортного средства, тем самым вызывая отображение шкалы 62 скорости транспортного средства на дисплее 15, как показано на Фиг.6. Шкала 62 скорости транспортного средства позволяет водителю осуществлять выбор параметра скорости, который ограничивает допустимую скорость транспортного средства при выполнении маневра параллельной парковки. Как показано, шкала 62 скорости транспортного средства может включать в себя подвижный указатель 63, который может быть расположен между и включительно минимальным уровнем 64 скорости транспортного средства и максимальным уровнем 66 скорости транспортного средства. Таким образом, водители, желающие максимально быстро выполнить параллельную парковку транспортного средства 10, могут выбирать максимальный уровень 66 скорости транспортного средства, тогда как более осторожные водители могут выбирать минимальный уровень 64 скорости транспортного средства или уровень скорости транспортного средства между минимальным уровнем 64 скорости транспортного средства и максимальным уровнем 66 скорости транспортного средства. Для осуществления выбора уровня скорости транспортного средства водитель может использовать его или ее палец, чтобы перетаскивать указатель 63 на требуемый уровень скорости транспортного средства. После этого водитель может подтверждать его или ее выбор уровня скорости транспортного средства с помощью другого события касания. После подтверждения выбор уровня скорости транспортного средства сообщается системе 30 помощи при парковке, которая, в свою очередь, может управлять выходной мощностью системы 20 трансмиссии так, что транспортное средство 10 может поддерживаться на или ниже выбранного уровня скорости транспортного средства при выполнении маневра параллельной парковки.
[0026] Дополнительно или альтернативно водитель также может ограничивать допустимое расстояние между транспортным средством 10 и одним или более ограничивающими объектами, расположенными вблизи целевого парковочного места. Например, водитель может касаться одной или более моделей 48', 50', 52' объектов, тем самым вызывая отображение соответствующей шкалы предотвращения столкновения с объектом на дисплее 15. Шкала предотвращения столкновения с объектом может иметь вид, подобный шкале 62 скорости транспортного средства, и выполнена с возможностью позволять водителю выбирать между и включительно минимальным уровнем предотвращения столкновения с объектом и максимальным уровнем предотвращения столкновения с объектом, причем минимальный уровень предотвращения столкновения с объектом накладывает меньшие ограничения расстояния между транспортным средством 10 и выбранным ограничивающим объектом, тогда как максимальный уровень предотвращения столкновения с объектом накладывает большие ограничения расстояния между транспортным средством 10 и выбранным ограничивающим объектом. Однако следует понимать, что ограничения расстояния могут изменяться в зависимости от выбранного ограничивающего объекта. Например, если ограничивающий объект соответствует бордюру 52 или некоторому другому объекту, имеющему низкую высоту относительно земли, выбор минимального уровня предотвращения столкновения с объектом может позволять некоторым частям транспортного средства 10 (например, колесам 22) входить в контакт с бордюром 52, если необходимо во время маневра параллельной парковки. Наоборот, если ограничивающие объекты соответствует транспортным средствам 48 или 50, выбор минимального уровня предотвращения столкновения с объектом может позволять транспортному средству 10 находиться в крайней близости к объекту без фактического столкновения с ним.
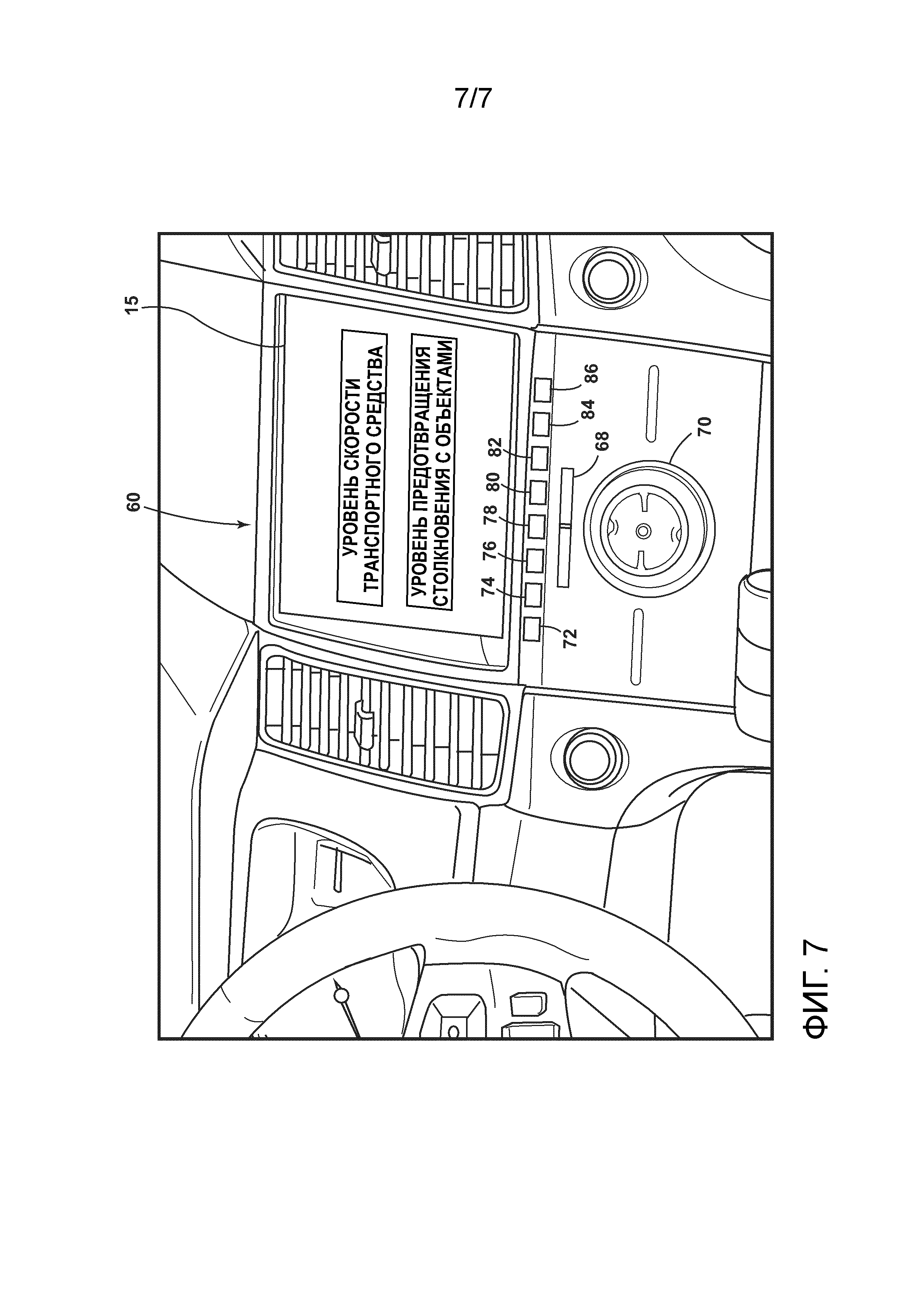
[0027] Таким образом, выбор минимального уровня предотвращения столкновения с объектом в общем обеспечивает параллельную парковку транспортного средства 10 на меньших парковочных местах, тогда как выбор максимального уровня предотвращения столкновения с объектом может требовать большего доступного парковочного места. При назначении допустимого расстояния между транспортным средством 10 и выбранным ограничивающим объектом система 30 помощи при парковке может основываться на выборах предотвращения столкновения с объектом, осуществляемых водителем, в дополнение к информации, принимаемой от системы 26 обнаружения. Если водитель не желает осуществлять никакие выборы уровня скорости транспортного средства и/или уровня предотвращения столкновения с объектом, система 30 помощи при парковке может назначать уровень скорости транспортного средства и предотвращения столкновения с объектом по умолчанию при выполнении маневра параллельной парковки. В альтернативных вариантах выполнения, выбираемые параметры парковки, описанные выше, могут быть представлены водителю в качестве опций меню на дисплее 15, и выборы параметров парковки могут быть осуществлены с использованием других пользовательских устройств ввода в транспортном средстве 10, таких как ползунок 68, вращающаяся ручка 70, одна или более кнопок 72-86 или их совокупность, как для примера показано на Фиг.7.
[0028] Согласно одному варианту выполнения, система 30 помощи при парковке также может основываться на сохраненных выборах параметров парковки так, что водитель не должен осуществлять выборы параметров парковки каждый раз при выполнении маневра параллельной парковки. Например, пользователь может назначать предпочтительные выборы параметров парковки посредством сенсорного экрана дисплея 15 или другого человеко-машинного интерфейса. Предпочтительные выборы параметров парковки сообщаются системе 30 помощи при парковке, и в ответ система 30 помощи при парковке будет обнаруживать только целевые парковочные места, которые совместимы с выборами параметров парковки, определенными пользователем. Пользователю необходимо только один раз назначить его или ее предпочтительные выборы параметров парковки, и он может изменять их в любое время. В результате процесс параллельной парковки транспортного средства 10 становится более быстрым.
[0029] Когда возможное целевое парковочное место обнаружено, и параметры парковки установлены, водитель получает инструкцию для размещения транспортного средства 10 для движения задним ходом на этапе I. На этапе J система 30 помощи при парковке автоматически управляет транспортным средством 10 во время выполнения маневра параллельной парковки, который регулируется выбором(ами) параметра(ов) парковки, осуществленными ранее на этапе H. На протяжении маневра параллельной парковки водитель отвечает за применение газа (например, нажатие педали 14 газа) и остановку транспортного средства 10 (например, нажатие педали 12 тормоза) на основании инструкций, обеспечиваемых системой 30 помощи при парковке. Водитель также может получать инструкцию для размещения транспортного средства для движения передним ходом и/или задним ходом столько раз, сколько необходимо, так, что транспортное средство 10 может быть успешно припарковано на целевое парковочное место. Однако в отношении полностью автономных транспортных средств применение газа и тормоза в дополнение к переключению передачи может быть выполнено автоматически системой 30 помощи при парковке.
[0030] Соответственно здесь предпочтительно обеспечены система и способ параллельной парковки транспортного средства на целевое парковочное место. В отличие предыдущих систем и способов раскрытие, обеспеченное здесь, позволяет водителю устанавливать различные параметры парковки на основании его или ее уровней комфорта.
[0031] Должно быть понятно, что изменения и преобразования могут быть выполнены в вышеупомянутой конструкции без отклонения от концепций настоящего изобретения, и дополнительно должно быть понятно, что такие концепции должны покрываться следующей далее формулой изобретения, кроме тех случаев, когда пункты формулы изобретения своей формулировкой указывают иное.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Транспортное средство, система напоминания о перестановке шин и способ для выявления интервала обслуживания шин для транспортного средства
Управление транспортным средством для автоматического выезда с места стоянки автомобилей
Система содействия парковке транспортного средства и способ парковки
Система и способ (варианты) параллельной парковки транспортного средства

