Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления движением и к устройству управления движением для управления движением транспортного средства.
Уровень техники
[0002] Чтобы предотвращать приближение рассматриваемого транспортного средства к другому транспортному средству на перекрестке, традиционно известна технология, которая включает в себя обнаружение позиции рассматриваемого транспортного средства, получение информации полос движения дороги, по которой движется рассматриваемое транспортное средство, из картографической информации на основе обнаруженной позиции рассматриваемого транспортного средства, указание полосы движения, в которой движется рассматриваемое транспортное средство, и направления движения рассматриваемого транспортного средства и передачу указанной информации полосы движения и направления движения в другое транспортное средство (например, патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2010-259021A
Сущность изобретения
Задачи, решаемые изобретением
[0004] При указании полосы движения, в которой движется рассматриваемое транспортное средство, позиция рассматриваемого транспортного средства должна обнаруживаться с высокой степенью точности. Тем не менее, в традиционной технологии датчик для обнаружения позиции транспортного средства с высокой степенью точности является дорогим, что может приводить к повышенным затратам при изготовлении транспортных средств.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ управления движением, который обеспечивает возможность надлежащего вывода информации относительно граничных линий полосы движения.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему через обнаружение информации относительно граничной линии полосы движения для полосы движения рядом с рассматриваемым транспортным средством в качестве реальной информации граничных линий из фактического окружения рядом с рассматриваемым транспортным средством, совмещение реальной информации граничных линий и картографической информации граничных линий для того, чтобы формировать совмещенную информацию граничных линий, и вывод сформированной совмещенной информации граничных линий. Картографическая информация граничных линий является информацией относительно граничной линии полосы движения для полосы движения, включенной в картографическую информацию.
Преимущества изобретения
[0007] Согласно настоящему изобретению, информация относительно граничных линий полосы движения может надлежащим образом выводиться.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства управления движением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является видом для описания диапазона обнаружения датчика обнаружения окружающих условий.
Фиг. 3(A) является видом для описания облаков точек на картографических граничных линиях, и фиг. 3(B) является видом для описания облаков точек на граничных линиях согласно данным датчика.
Фиг. 4 является видом для описания сдвигов между картографическими граничными линиями и граничными линиями согласно данным датчика, когда ошибки возникают в результатах обнаружения посредством устройства обнаружения позиции рассматриваемого транспортного средства.
Фиг. 5 является видом для описания примера способа совмещения граничных линий полосы движения.
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно первому варианту осуществления.
Фиг. 7 является видом, иллюстрирующим пример картографических граничных линий.
Фиг. 8 является видом, иллюстрирующим пример совпадающих участков и участков картографических совмещенных объектов.
Фиг. 9 является видом для описания подробностей способа совмещения граничных линий полосы движения.
Фиг. 10 является видом для описания способа указания номера полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство.
Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно второму варианту осуществления.
Фиг. 12 является видом для описания картографических граничных линий и граничных линий согласно данным датчика, когда точность обнаружения позиции устройства обнаружения позиции рассматриваемого транспортного средства, точность обнаружения датчика обнаружения окружающих условий или точность информации относительно граничных линий полосы движения, которой обладает картографическая информация, является низкой.
Фиг. 13 является видом, иллюстрирующим пример отношения соответствия между степенью надежности результатов обнаружения посредством датчика обнаружения окружающих условий и размером участков совмещенных объектов согласно данным датчика.
Фиг. 14 является видом для описания способа совмещения участков совмещенных объектов согласно данным датчика и участков картографических совмещенных объектов.
Фиг. 15 является видом для описания способа совмещения участков совмещенных объектов согласно данным датчика и участков картографических совмещенных объектов.
Оптимальный режим осуществления изобретения
[0009] Далее описаны один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, примерно иллюстрируется и описывается устройство управления движением, оснащенное в транспортном средстве.
[0010] Устройство управления движением согласно одному или более вариантов осуществления настоящего изобретения работает с возможностью обнаруживать граничные линии полосы движения, к примеру, разделительные линии, бордюрные камни и дорожные ограждения, которые фактически существуют рядом с транспортным средством (рассматриваемым транспортным средством), с использованием одного или более датчиков, оснащенных в рассматриваемом транспортном средстве, и обнаруживать информацию относительно граничных линий полосы движения запланированного маршрута движения рассматриваемого транспортного средства из картографической информации. Затем устройство управления движением работает с возможностью совмещать граничные линии полосы движения, обнаруженные посредством датчиков, и граничные линии полосы движения картографической информации и выводить информацию относительно совмещенных граничных линий полосы движения.
[0011] Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 100 управления движением согласно настоящему варианту осуществления. Как проиллюстрировано на фиг. 1, устройство 100 управления движением согласно настоящему варианту осуществления включает в себя датчик 110 обнаружения окружающих условий, устройство 120 обнаружения позиции рассматриваемого транспортного средства, картографическую базу 130 данных, устройство 140 представления, устройство 150 управления приведением в движение и устройство 160 управления. Эти устройства соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0012] Датчик 110 обнаружения окружающих условий обнаруживает помехи (к примеру, другие транспортные средства) и дорожные метки (к примеру, разделительные линии и бордюрные камни), существующие рядом с рассматриваемым транспортным средством. Примеры датчика 110 обнаружения окружающих условий включают в себя камеру переднего вида, которая захватывает изображения впереди рассматриваемого транспортного средства, камеру заднего вида, которая захватывает изображения позади рассматриваемого транспортного средства, и боковые камеры, которые захватывают изображения по бокам от рассматриваемого транспортного средства. Лазерный дальномер (LRF), который обнаруживает помехи рядом с рассматриваемым транспортным средством, также может использоваться в качестве датчика 110 обнаружения окружающих условий. Датчик 110 обнаружения окружающих условий может быть сконфигурирован с использованием одного датчика из вышеописанных датчиков или также может быть сконфигурирован с использованием комбинации двух или более датчиков. Результаты обнаружения посредством датчика 110 обнаружения окружающих условий выводятся в устройство 160 управления.
[0013] Устройство 120 обнаружения позиции рассматриваемого транспортного средства состоит из GPS-модуля, гиродатчика, датчика скорости транспортного средства и других необходимых компонентов. Устройство 120 обнаружения позиции рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые из множества спутников связи с использованием GPS-модуля, чтобы периодически получать позиционную информацию целевого транспортного средства (рассматриваемого транспортного средства), и обнаруживает текущую позицию целевого транспортного средства на основе полученной позиционной информации целевого транспортного средства, информации варьирования угла, полученной из гиродатчика, и скорости транспортного средства, полученной из датчика скорости транспортного средства. Позиционная информация целевого транспортного средства, обнаруженная посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, выводится в устройство 160 управления.
[0014] Картографическая база 130 данных сохраняет картографическую информацию, которая включает в себя информацию дороги. Информация дороги включает в себя информацию относительно граничных линий полосы движения, которые задают полосы движения дорог, информацию относительно перекрестков, стоп-линий и пешеходных переходов, информацию относительно форм дорог (к примеру, информацию в отношении того, является или нет дорога кривой) и информацию относительно кривизны дорог. Картографическая база 130 данных сохраняет эти информационные элементы дороги таким образом, что они ассоциированы с соответствующими позициями на карте. Это обеспечивает возможность устройству 100 управления движением обращаться к картографической базе 130 данных, чтобы за счет этого получать информацию относительно граничных линий полосы движения, перекрестков, стоп-линий, пешеходных переходов, форм дорог и кривизны дороги в соответствующих позициях на запланированном маршруте движения рассматриваемого транспортного средства. Информация относительно граничных линий полосы движения включает в себя информацию в отношении того, представляют собой граничные линии полосы движения разделительные линии или бордюрные камни, и в случае разделительных линий, дополнительно включает в себя информацию относительно цвета (к примеру, белого и желтого) и типов (к примеру, двойные линии, сплошные линии и пунктирные линии) граничных линий полосы движения.
[0015] Устройство 140 представления, например, может представлять собой такое устройство, как дисплей навигационного устройства, дисплей, включенный в зеркало заднего вида, дисплей, включенный в приборный блок, дисплей на лобовом стекле, проецируемый на ветровое стекло, и динамик аудиоустройства.
[0016] Устройство 150 управления приведением в движение управляет движением рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство едет за едущим впереди транспортным средством, устройство 150 управления приведением в движение управляет работой приводного механизма (которая включает в себя работу двигателя внутреннего сгорания в случае автомобиля с двигателем и работу электромотора в случае электромобиля и дополнительно включает в себя распределение крутящего момента для двигателя внутреннего сгорания и электромотора в случае гибридного автомобиля) и операцией торможения, чтобы достигать ускорения, замедления и скорости транспортного средства таким образом, что расстояние между рассматриваемым транспортным средством и едущим впереди транспортным средством может поддерживаться равным постоянному расстоянию. Когда рассматриваемое транспортное средство сменяет полосу движения или поворачивает направо или налево на перекрестке, устройство 150 управления приведением в движение управляет работой исполнительного устройства рулевого управления, чтобы управлять работой колес, и ввиду этого выполняет управление изменением направления рассматриваемого транспортного средства. Другие известные способы также могут использоваться в качестве способа управления движением посредством устройства 150 управления приведением в движение.
[0017] Помимо этого или альтернативно, устройство 150 управления приведением в движение управляет движением рассматриваемого транспортного средства на основе информации относительно граничных линий полосы движения, выводимой из устройства 160 управления, которое описывается ниже. Например, устройство 150 управления приведением в движение воспринимает полосу движения запланированного маршрута движения рассматриваемого транспортного средства на основе информации относительно граничных линий полосы движения, выводимой из устройства 160 управления, и ввиду этого может управлять движением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство движется в полосе движения запланированного маршрута движения. Помимо этого или альтернативно, устройство 150 управления приведением в движение воспринимает позицию на карте, в которой движется рассматриваемое транспортное средство (к примеру, полосу движения на правый поворот, перекресток и позицию перед пешеходным переходом) на основе информации относительно граничных линий полосы движения, выводимой из устройства 160 управления, и ввиду этого может надлежащим образом определять действие рассматриваемого транспортного средства (к примеру, остановку, ускорение, поворот направо и поворот налево).
[0018] Устройство 160 управления состоит из постоянного запоминающего устройства (ROM), которое сохраняет программы для управления движением рассматриваемого транспортного средства, центрального процессора (CPU), который выполняет программы, сохраненные в ROM, и оперативного запоминающего устройства (RAM), которое служит в качестве доступного устройства хранения данных. В качестве замены или в дополнение к CPU, также может использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п. в качестве функциональной схемы.
[0019] Устройство 160 управления выполняет программы, сохраненные в ROM с использованием CPU, чтобы за счет этого достигать следующих различных функций: функция поиска маршрута для поиска запланированного маршрута движения рассматриваемого транспортного средства; функция обнаружения картографических граничных линий для обнаружения граничных линий полос движения на основе картографической информации; функция обнаружения граничных линий согласно данным датчика для обнаружения граничных линий полос движения на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий; функция совмещения граничных линий для совмещения граничных линий полосы движения, обнаруженных на основе картографической информации, и граничных линий полосы движения, обнаруженных на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий; и функция вывода для вывода информации относительно совмещенных граничных линий полосы движения. Ниже описывается каждая функция устройства 190 управления.
[0020] Устройство 160 управления использует функцию поиска маршрута для того, чтобы формировать запланированный маршрут движения рассматриваемого транспортного средства из текущей позиции и места назначения рассматриваемого транспортного средства. Например, функция поиска маршрута может служить для того, чтобы получать позицию рассматриваемого транспортного средства из устройства 120 обнаружения позиции рассматриваемого транспортного средства и получать место назначения, которое вводит водитель, из устройства ввода (не проиллюстрировано). Функция поиска маршрута также может служить для того, чтобы выполнять поиск запланированного маршрута движения с использованием способа, известного в данной области техники.
[0021] Устройство 160 управления использует функцию обнаружения картографических граничных линий для того, чтобы обнаруживать граничные линии полосы движения для полос движения, включающих в себя полосу движения рассматриваемого транспортного средства, на основе картографической информации, сохраненной в картографической базе 130 данных. Граничные линии полосы движения означают линии, которые задают границы между полосами движения и смежными полосами движения или границы между полосами движения и обочинами дороги, к примеру, разделительные линии (сплошные линии, двойные линии, пунктирные линии и другие линии, нарисованные белым, оранжевым, желтым и т.п. на дороге, чтобы задавать полосы движения), бордюрные камни и дорожные ограждения. Картографическая информация, сохраненная в картографической базе 130 данных, включает в себя информацию относительно граничных линий каждой полосы движения, и функция обнаружения картографических граничных линий может служить для того, чтобы обращаться к картографической информации, чтобы обнаруживать граничные линии полосы движения для полос движения, включающих в себя полосу движения рассматриваемого транспортного средства, из картографической информации. Граничные линии полосы движения, обнаруженные с использованием функции обнаружения картографических граничных линий, не ограничены полосами движения рядом с рассматриваемым транспортным средством, и функция обнаружения картографических граничных линий также может служить для того, чтобы обнаруживать граничные линии полосы движения для полос движения, например, на запланированном маршруте движения рассматриваемого транспортного средства. В нижеприведенном описании, граничные линии полосы движения, обнаруженные с использованием функции обнаружения картографических граничных линий, упоминаются как "картографические граничные линии".
[0022] Устройство 160 управления использует функцию обнаружения граничных линий согласно данным датчика для того, чтобы обнаруживать граничные линии полосы движения для полос движения рядом с рассматриваемым транспортным средством на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий. Например, функция обнаружения граничных линий согласно данным датчика может служить для того, чтобы обнаруживать граничные линии полосы движения для полос движения рядом с рассматриваемым транспортным средством через захват изображений разделительных линий, бордюрных камней и дорожных ограждений, существующих рядом с рассматриваемым транспортным средством, с использованием камеры переднего вида, боковых камер или камеры заднего вида и анализ захваченных изображений. Помимо этого или альтернативно, функция обнаружения граничных линий согласно данным датчика может служить для того, чтобы обнаруживать граничные линии полосы движения для полос движения рядом с рассматриваемым транспортным средством через обнаружение яркости поверхности дороги и разделительных линий рядом с рассматриваемым транспортным средством с использованием лазерного дальномера или обнаружения выступов бордюрных камней посредством измерения расстояния.
[0023] На общих дорогах, которые включают в себя множество кривых и перекрестков, затруднительно оценивать направления, в которых существуют разделительные линии и бордюрные камни, и ограничено разрешение камер. Диапазон, в котором камеры могут обнаруживать разделительные линии, бордюрные камни, дорожные ограждения и т.д. с высокой степенью точности, ввиду этого представляет собой диапазон приблизительно в несколько десятков метров от камер. Лазерный дальномер также может использоваться для того, чтобы идентифицировать разделительные линии и бордюрные камни. Тем не менее, в этом случае лазерный дальномер должен устанавливаться вниз, чтобы обнаруживать яркость разделительных линий, нарисованных на поверхности дороги, и обнаруживать небольшие выступы бордюрных камней. Соответственно, также в случае использования лазерного дальномера, диапазон, в котором лазерный дальномер может обнаруживать разделительные линии и бордюрные камни с высокой степенью точности, представляет собой диапазон приблизительно в несколько десятков метров от лазерного дальномера. Таким образом, как проиллюстрировано на фиг. 2, диапазон, в котором функция обнаружения граничных линий согласно данным датчика может служить для того, чтобы обнаруживать граничные линии полосы движения, представляет собой диапазон приблизительно в несколько десятков метров от рассматриваемого транспортного средства. Фиг. 2 является видом для описания диапазона обнаружения датчика 110 обнаружения окружающих условий. В нижеприведенном описании, граничные линии полосы движения, обнаруженные с использованием функции обнаружения граничных линий согласно данным датчика, упоминаются как "граничные линии согласно данным датчика".
[0024] Как проиллюстрировано на фиг. 3(A), когда картографическая информация сохраняется таким образом, что картографические граничные линии представляются посредством облака точек, состоящего из позиционных координат точек на каждой картографической граничной линии, функция обнаружения картографических граничных линий может служить для того, чтобы обнаруживать каждую из картографических граничных линий в качестве картографической граничной линии, представленной посредством облака точек. Более конкретно, функция обнаружения картографических граничных линий может служить для того, чтобы обнаруживать каждую из правой и левой картографических граничных линий относительно направления движения рассматриваемого транспортного средства в качестве картографической граничной линии, представленной посредством облака точек. С другой стороны, когда картографическая информация сохраняется таким образом, что картографические граничные линии выражаются посредством функции, имеющей конкретный порядок, функция обнаружения картографических граничных линий может служить для того, чтобы обнаруживать каждую из картографических граничных линий в качестве картографической граничной линии, выражаемой посредством функции.
[0025] Аналогично, как проиллюстрировано на фиг. 3(B), функция обнаружения граничных линий согласно данным датчика может служить для того, чтобы обнаруживать каждую из граничных линий согласно данным датчика в качестве граничной линии согласно данным датчика, представленной посредством облака точек. Более конкретно, функция обнаружения граничных линий согласно данным датчика может служить для того, чтобы обнаруживать каждую из правой и левой граничных линий согласно данным датчика относительно направления движения рассматриваемого транспортного средства в качестве граничной линии согласно данным датчика, представленной посредством облака точек. Помимо этого или альтернативно, функция обнаружения граничных линий согласно данным датчика может служить для того, чтобы обнаруживать каждую из граничных линий согласно данным датчика в качестве функции, имеющей конкретный порядок. Например, когда граничные линии согласно данным датчика, обнаруженные посредством датчика 110 обнаружения окружающих условий, представляются посредством облака точек, функция обнаружения граничных линий согласно данным датчика может служить для того, чтобы подгонять каждую из граничных линий согласно данным датчика к функции, имеющей конкретный порядок, чтобы за счет этого обнаруживать функцию, подогнанную к каждой из граничных линий согласно данным датчика, в качестве граничной линии согласно данным датчика, выражаемой посредством функции. Фиг. 3(A) является видом для описания картографических граничных линий, представленных посредством облаков точек, и фиг. 3(B) является видом для описания граничных линий согласно данным датчика, представленных посредством облаков точек.
[0026] Устройство 160 управления использует функцию совмещения граничных линий для того, чтобы совмещать картографические граничные линии, обнаруженные с использованием функции обнаружения картографических граничных линий, и граничные линии согласно данным датчика, обнаруженные с использованием функции обнаружения граничных линий согласно данным датчика для того, чтобы формировать граничные линии полосы движения для полос движения, включающих в себя полосу движения, в которой движется рассматриваемое транспортное средство. Здесь, как проиллюстрировано на фиг. 2, диапазон, в котором функция обнаружения граничных линий согласно данным датчика может служить для того, чтобы обнаруживать граничные линии полосы движения (граничные линии согласно данным датчика) с высокой степенью точности, представляет собой диапазон рядом с рассматриваемым транспортным средством, и по мере того, как увеличивается расстояние от рассматриваемого транспортного средства, точность обнаружения граничных линий полосы движения (граничных линий согласно данным датчика) понижается. Следовательно, в настоящем варианте осуществления, область за пределами диапазона обнаружения, в котором функция обнаружения граничных линий согласно данным датчика может служить для того, чтобы обнаруживать граничные линии полосы движения, дополняется с использованием граничных линий полосы движения (картографических граничных линий), обнаруженных с использованием функции обнаружения картографических граничных линий.
[0027] Например, фиг. 2 иллюстрирует состояние, в котором диапазон обнаружения датчика 110 обнаружения окружающих условий накладывается на позицию рассматриваемого транспортного средства, обнаруженную посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, и диапазон за пределами граничных линий согласно данным датчика на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий дополняется картографическими граничными линиями на основе картографической информации. Когда ошибка позиции рассматриваемого транспортного средства, обнаруженной посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, является небольшой, картографические граничные линии на основе картографической информации совпадают с граничными линиями согласно данным датчика на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий, как проиллюстрировано на фиг. 2, и большие сдвиги не возникают.
[0028] Тем не менее, к сожалению, ошибка обнаружения позиции рассматриваемого транспортного средства вследствие устройства 120 обнаружения позиции рассматриваемого транспортного средства может вызывать ошибку, как проиллюстрировано на фиг 4, между фактической позицией рассматриваемого транспортного средства (указываемой посредством пунктирных линий на чертеже) и позицией рассматриваемого транспортного средства (указываемой посредством сплошных линий на чертеже) на основе результата обнаружения посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства. В этом случае, как проиллюстрировано на фиг. 4, большие сдвиги возникают между картографическими граничными линиями на основе картографической информации и граничными линиями согласно данным датчика на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий. Ввиду этого, как проиллюстрировано на фиг. 4, граничные линии полосы движения, адаптированные к фактическим граничным линиям полосы движения, не могут формироваться просто посредством совмещения за пределами диапазона, в котором функция обнаружения граничных линий согласно данным датчика может служить для того, чтобы обнаруживать граничные линии согласно данным датчика, с картографическими граничными линиями, обнаруженными с использованием функции обнаружения картографических граничных линий.
[0029] Ввиду этого функция совмещения граничных линий служит для того, чтобы дополнять граничные линии согласно данным датчика, обнаруженные посредством датчика 110 обнаружения окружающих условий, картографическими граничными линиями на основе картографической информации таким образом, что, как проиллюстрировано на фиг. 2, граничные линии согласно данным датчика, обнаруженные посредством датчика 110 обнаружения окружающих условий, совпадают с картографическими граничными линиями на основе картографической информации. Например, функция совмещения граничных линий сначала служит для того, чтобы определять степень совпадения между граничной линией согласно данным датчика, обнаруженной посредством датчика 110 обнаружения окружающих условий, и картографической граничной линией на основе картографической информации с использованием схемы на основе итеративного алгоритма ближайших точек (ICP). ICP означает десятеричную систему счисления, используемую для того, чтобы совмещать "облако точек, представляющих граничную линию согласно данным датчика, обнаруженную посредством датчика 110 обнаружения окружающих условий" и "облако точек, представляющих картографическую граничную линию, которой обладает картографическая информация" на основе метода наименьших квадратов.
[0030] Фиг. 5 является видом, иллюстрирующим пример способа совмещения граничных линий полосы движения с использованием функции совмещения граничных линий. На фиг. 5, белые окружности формируют облака точек, представляющие картографические граничные линии, в то время как серые окружности формируют облака точек, представляющие граничные линии согласно данным датчика. Например, когда перекресток существует впереди рассматриваемого транспортного средства, как проиллюстрировано на фиг. 5, функция совмещения граничных линий может служить для того, чтобы принимать во внимание участок, в котором бордюрные камни около перекрестка размещаются приблизительно под прямым углом, чтобы совмещать "облака точек, представляющие граничные линии согласно данным датчика" с "облаками точек, представляющих граничные линии согласно данным датчика карты". Таким образом, функция совмещения граничных линий может служить для того, чтобы совмещать "облака точек, представляющие граничные линии согласно данным датчика" с "облаками точек, представляющих граничные линии согласно данным датчика карты" на основе отличительного участка дороги (приблизительно прямоугольного участка в примере, проиллюстрированном на фиг. 5), чтобы за счет этого обнаруживать участки картографических граничных линий, имеющих высокую степень совпадения с граничными линиями согласно данным датчика. Более на практике, даже когда рассматриваемое транспортное средство обнаруживается в позиции, отличающейся от фактической позиции, вследствие ошибки обнаружения устройства 120 обнаружения позиции рассматриваемого транспортного средства, как проиллюстрировано на фиг. 4, такое совмещение обеспечивает возможность получения соответствующей позиции рассматриваемого транспортного средства на карте, и граничные линии полосы движения для полос движения рядом с рассматриваемым транспортным средством могут надлежащим образом восприниматься.
[0031] Как описано выше, картографические граничные линии и граничные линии согласно данным датчика могут представляться посредством облака точек или выражаться посредством функции, как проиллюстрировано на фиг. 3(A) и 3(B). В вышеописанном ICP, картографическая граничная линия и граничная линия согласно данным датчика, представленные посредством облака точек, могут подвергаться перекрестной проверке, но картографическая граничная линия и граничная линия согласно данным датчика, выражаемые посредством функции, не могут подвергаться перекрестной проверке друг с другом. Следовательно, когда картографическая граничная линия или граничная линия согласно данным датчика обнаруживается в качестве функции, картографическая граничная линия или граничная линия согласно данным датчика, выражаемая посредством функции, возможно, должна преобразовываться в картографическую граничную линию или граничную линию согласно данным датчика, представленную посредством облака точек. В этом случае, преобразование, возможно, должно выполняться таким образом, что информация относительно картографической граничной линии или граничной линии согласно данным датчика, выражаемой посредством функции, и информация относительно картографической граничной линии или граничной линии согласно данным датчика, представленной посредством облака точек, попадают в пределы определенного диапазона ошибок. Ввиду этого функция совмещения граничных линий служит для того, чтобы уменьшать интервал позиционных координат точек на картографической граничной линии или граничной линии согласно данным датчика, представленной посредством облака точек, по мере того, как увеличивается кривизна дороги, и увеличивать интервал позиционных координат точек на картографической граничной линии или граничной линии согласно данным датчика, представленной посредством облака точек, по мере того, как уменьшается кривизна дороги.
[0032] В настоящем варианте осуществления, функция совмещения граничных линий служит для того, чтобы проводить перекрестную проверку граничных линий согласно данным датчика и картографических граничных линий со ссылкой на позицию рассматриваемого транспортного средства или запланированный маршрут движения рассматриваемого транспортного средства. Например, функция совмещения граничных линий служит для того, чтобы проводить перекрестную проверку граничной линии согласно данным датчика и участка картографической граничной линии около позиции рассматриваемого транспортного средства, обнаруженной посредством устройства обнаружения позиции 120, и когда они не совпадают друг с другом, функция совмещения граничных линий служит для того, чтобы проводить перекрестную проверку граничной линии согласно данным датчика и другого участка картографической граничной линии, расположенного в позиции, дальней от позиции рассматриваемого транспортного средства. Помимо этого или альтернативно, функция совмещения граничных линий служит для того, чтобы проводить перекрестную проверку картографической граничной линии и граничной линии согласно данным датчика вдоль запланированного маршрута движения рассматриваемого транспортного средства. Это обеспечивает возможность эффективной перекрестной проверки картографических граничных линий и граничных линий согласно данным датчика.
[0033] Далее описывается процесс управления движением согласно первому варианту осуществления со ссылкой на фиг. 6. Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно первому варианту осуществления.
[0034] На этапе S101, устройство 160 управления использует функцию поиска маршрута для того, чтобы обнаруживать текущую позицию рассматриваемого транспортного средства. На этапе S102, устройство 160 управления использует функцию поиска маршрута для того, чтобы выполнять поиск запланированного маршрута движения. Например, функция поиска маршрута служит для того, чтобы выполнять поиск запланированного маршрута движения из текущей позиции рассматриваемого транспортного средства в место назначения на основе позиционной информации рассматриваемого транспортного средства, полученной на этапе S101. Функция поиска маршрута может выполнять поиск запланированного маршрута движения не только на основе дороги, по которой движется рассматриваемое транспортное средство, но также и на основе полосы движения, в которой движется рассматриваемое транспортное средство. Например, функция поиска маршрута может служить для того, чтобы определять запланированный маршрут движения рассматриваемого транспортного средства на уровне полосы движения посредством схемы с использованием алгоритма поиска по графу, такого как алгоритм Дейкстры и алгоритм A*-поиска. В настоящем варианте осуществления, картографическая база 130 данных сохраняет картографическую информацию, которая включает в себя, например, информацию относительно соединений и узлов каждой полосы движения. Соединения предварительно взвешиваются в соответствии с проезжаемым расстоянием, дорожной ситуацией и т.д. каждой полосы движения (например, взвешивание соединений увеличивается по мере того, как увеличивается расстояние или ухудшается дорожная ситуация). Функция поиска маршрута дополнительно служит для того, чтобы указывать полосу движения, которая является подходящей для маршрута движения в место назначения, и корректировать взвешивание соединений указанной полосы движения. Например, когда правый поворот требуется для того, чтобы прибывать к месту назначения, взвешивание соединений полосы движения для правого поворота может корректироваться на уменьшение. Функция поиска маршрута может служить для того, чтобы выполнять поиск запланированного маршрута движения, который представляет собой маршрут на уровне полосы движения, на котором общая сумма взвешивания соединений является минимальной в полосе движения, из текущей позиции рассматриваемого транспортного средства в место назначения, с использованием алгоритма поиска по графу, к примеру, алгоритма Дейкстры и алгоритма A*-поиска.
[0035] На этапе S103, устройство 160 управления использует функцию обнаружения картографических граничных линий для того, чтобы обнаруживать картографические граничные линии. В настоящем варианте осуществления, картографическая база 130 данных сохраняет информацию относительно граничных линий полосы движения для каждой полосы движения таким образом, что информация ассоциирована с позициями на карте. В примере, проиллюстрированном на фиг. 7, например, функция обнаружения картографических граничных линий может служить для того, чтобы получать информацию граничных линий полосы движения для полосы движения на запланированном маршруте движения рассматриваемого транспортного средства и воспринимать то, что бордюрные камни B1 существуют в левой стороне направления движения. Затем функция обнаружения картографических граничных линий может служить для того, чтобы обнаруживать бордюрные камни B1 в левой стороне направления движения в качестве картографической граничной линии в левой стороне направления движения. Функция обнаружения картографических граничных линий также может служить для того, чтобы воспринимать, что сигнальная линия A2 дорожной разметки существует в правой стороне направления движения, и обнаруживать сигнальную линию A2 дорожной разметки в правой стороне направления движения в качестве картографической граничной линии в правой стороне направления движения. Аналогично, в примере, проиллюстрированном на фиг. 7, функция обнаружения картографических граничных линий может служить для того, чтобы обнаруживать бордюрные камни B2 и сигнальную линию A1 дорожной разметки в качестве картографических граничных линий, расположенных впереди рассматриваемого транспортного средства на запланированном маршруте движения. Фиг. 7 является видом, иллюстрирующим пример картографических граничных линий.
[0036] На фактическом перекрестке, сегментированные линии не существуют на перекрестке. Тем не менее, как проиллюстрировано на фиг. 7, картографическая информация сохраняется с виртуальной граничной линией полосы движения даже на перекрестке. Ввиду этого, в случае фиг. 7, функция обнаружения картографических граничных линий может служить для того, чтобы обнаруживать картографическую граничную линию A3 в правой стороне направления движения даже на перекрестке, на котором рассматриваемое транспортное средство поворачивает налево.
[0037] На этапе S104, устройство 160 управления использует функцию обнаружения граничных линий согласно данным датчика для того, чтобы выполнять обнаружение граничных линий согласно данным датчика на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий. Как проиллюстрировано на фиг. 2, диапазон, в котором датчик 110 обнаружения окружающих условий может обнаруживать граничные линии согласно данным датчика, представляет собой диапазон определенного расстояния (например, несколько десятков метров) от рассматриваемого транспортного средства, т.е. диапазон рядом с рассматриваемым транспортным средством.
[0038] На этапе S105, устройство 160 управления использует функцию совмещения граничных линий для того, чтобы проводить перекрестную проверку картографических граничных линий, обнаруженных на этапе S103, и граничных линий согласно данным датчика, обнаруженных на этапе S104. После этапа S105 выполняется этап S106, на котором функция совмещения граничных линий служит для того, чтобы определять то, существуют или нет участки, которые совпадают с граничными линиями согласно данным датчика, в картографических граничных линиях, на основе результата перекрестной проверки этапа S105. Когда участки, которые совпадают с граничными линиями согласно данным датчика, существуют в картографических граничных линиях, процедура переходит к этапу S107. Когда участки, которые совпадают с граничными линиями согласно данным датчика, не существуют в картографических граничных линиях, процесс управления движением, проиллюстрированный на фиг. 6, завершается. В примере, проиллюстрированном на фиг. 5, например, участки, которые совпадают с граничными линиями согласно данным датчика, существуют в картографических граничных линиях, так что процедура переходит к этапу S107. Случай "совпадения (и его производных)" не ограничен случаем, в котором участки, точно идентичные с граничными линиями согласно данным датчика, существуют в картографических граничных линиях, и также включает в себя случай, в котором участки, имеющие степень совпадения с предварительно определенным значением или более с граничными линиями согласно данным датчика, существуют в картографических граничных линиях. Предварительно определенное значение может надлежащим образом задаваться посредством проектирования и т.п.
[0039] На этапе S107 и следующих этапах, процесс выполняется с использованием картографических граничных линий и граничных линий согласно данным датчика, представленных посредством облака точек. Картографическая граничная линия, представленная посредством облака точек, и граничная линия согласно данным датчика, представленная посредством облака точек, означают граничные линии, как проиллюстрировано на фиг. 5, при этом картографическая граничная линия и граничная линия согласно данным датчика представляются посредством позиционных координат точек на картографической граничной линии и граничной линии согласно данным датчика. С другой стороны, в зависимости от проектирования датчика 110 обнаружения окружающих условий, устройства 160 управления и картографической информации, картографические граничные линии и граничные линии согласно данным датчика могут обнаруживаться в качестве граничной линии, представленной посредством облака точек на этапах S103 и S104, или также могут обнаруживаться в качестве функции, имеющей конкретный порядок.
[0040] Ввиду этого, когда картографические граничные линии и граничные линии согласно данным датчика, представленные посредством облака точек, обнаруживаются на этапах S103 и S104, процессы этапа S107 и следующих этапов выполняются с использованием картографических граничных линий и граничных линий согласно данным датчика, представленных посредством облака точек без изменений. С другой стороны, когда картографические граничные линии и граничные линии согласно данным датчика, выражаемые посредством функции, обнаруживаются на этапах S103 и S104, картографические граничные линии и граничные линии согласно данным датчика, выражаемые посредством функции, преобразуются в картографические граничные линии и граничные линии согласно данным датчика, представленные посредством облака точек, и процессы этапа S107 и следующих этапов выполняются.
[0041] Когда картографические граничные линии и граничные линии согласно данным датчика, выражаемые посредством функции, преобразуются в картографические граничные линии и граничные линии согласно данным датчика, представленные посредством облака точек, интервалы для обнаружения позиционных координат точек на картографических граничных линиях и граничных линиях согласно данным датчика, выражаемых посредством функции, могут надлежащим образом изменяться таким образом, что ошибки не превышают предварительно определенное значение между картографическими граничными линиями и граничными линиями согласно данным датчика, выражаемыми посредством функции, и картографическими граничными линиями и граничными линиями согласно данным датчика, представленными посредством облака точек. В примерной конфигурации, когда форма дороги представляет собой приблизительно прямую линию, позиционные координаты точек на картографических граничных линиях и граничных линиях согласно данным датчика могут обнаруживаться с идентичными интервалами, тогда как, когда форма дороги не представляет собой прямую линию, интервалы позиционных координат точек на картографических граничных линиях и граничных линиях согласно данным датчика могут уменьшаться по мере того, как увеличивается кривизна дороги. В этой конфигурации, когда форма дороги представляет собой приблизительно прямую линию, позиционные координаты точек на картографических граничных линиях и граничных линиях согласно данным датчика обнаруживаются с идентичными интервалами, и информация относительно картографических граничных линий и граничных линий согласно данным датчика ввиду этого может упрощаться. Кроме того, когда форма дороги представляет собой кривую, интервалы позиционных координат точек на картографических граничных линиях и граничных линиях согласно данным датчика уменьшаются по мере того, как увеличивается кривизна дороги, и картографические граничные линий и граничные линии согласно данным датчика ввиду этого могут обнаруживаться с высокой степенью точности. В дополнительной или альтернативной конфигурации, когда ограничение скорости дороги или скорость рассматриваемого транспортного средства не ниже предварительно определенной скорости, интервалы позиционных координат точек на картографических граничных линиях и граничных линиях согласно данным датчика могут увеличиваться по сравнению со случаем, в котором ограничение скорости дороги или скорость рассматриваемого транспортного средства ниже предварительно определенной скорости. Также в этом случае, картографические граничные линии и граничные линии согласно данным датчика могут обнаруживаться с высокой степенью точности в соответствии с состоянием движения рассматриваемого транспортного средства.
[0042] На этапе S107, как проиллюстрировано на фиг. 8, функция совмещения граничных линий служит для того, чтобы обнаруживать участки картографических граничных линий, которые совпадают с граничными линиями согласно данным датчика (эти участки в дальнейшем также упоминаются как "совпадающие участки"). Например, функция совмещения граничных линий может служить для того, чтобы проводить перекрестную проверку картографических граничных линий и граничных линий согласно данным датчика в определенном диапазоне со ссылкой на позицию рассматриваемого транспортного средства или запланированный маршрут движения рассматриваемого транспортного средства на карте и обнаруживать участки картографических граничных линий, которые имеют наибольшую степень совпадения с граничными линиями согласно данным датчика, в качестве совпадающих участков. В альтернативной конфигурации, функция совмещения граничных линий может обнаруживать участки картографических граничных линий, степень совпадения которых с граничными линиями согласно данным датчика не меньше предварительно определенного значения, и которые обнаруживаются сначала, в качестве совпадающих участков.
[0043] На этапе S108, как проиллюстрировано на фиг. 8, функция совмещения граничных линий служит для того, чтобы определять участки картографических совмещенных объектов. Участки картографических совмещенных объектов расположены на стороне направления движения рассматриваемого транспортного средства по сравнению с текущей позицией рассматриваемого транспортного средства и являются непрерывными относительно совпадающих участков, извлеченных на этапе S107. Фиг. 8 является видом, иллюстрирующим пример совпадающих участков и участков картографических совмещенных объектов. В примере, проиллюстрированном на фиг. 8, совпадающие участки картографических граничных линий указываются посредством серых сплошных линий и серых окружностей (облаков точек), тогда как участки картографических совмещенных объектов картографических граничных линий указываются посредством черных сплошных линий (жирный линий) и белых окружностей (облака точек), и оставшиеся участки картографических граничных линий указываются посредством черных сплошных линий (тонких линий) и черных окружностей (облака точек).
[0044] Помимо этого, на этапе S108, функция совмещения граничных линий служит для того, чтобы обнаруживать целевые точки S1 и S2 определенных участков картографических совмещенных объектов. Целевые точки S1 и S2 являются ближайшими к рассматриваемому транспортному средству. Затем функция совмещения граничных линий служит для того, чтобы сохранять позиционные координаты целевых точек S1 и S2 в RAM устройства 160 управления. В примере, проиллюстрированном на фиг. 9, например, функция совмещения граничных линий служит для того, чтобы обнаруживать целевые точки S1 и S2, ближайшие к рассматриваемому транспортному средству, и сохранять позиционные координаты (x1Lm, y1Lm) и (x1Rm, y1Rm) целевых точек S1 и S2.
[0045] На этапе S109, функция совмещения граничных линий служит для того, чтобы выполнять процесс добавления позиционных координат точек на граничных линиях согласно данным датчика, обнаруженных на этапе S104, в матрицу. Например, в настоящем варианте осуществления, RAM устройства 160 управления предварительно сохраняет пустую матрицу (R_bound [], L_bound []), которая соответствует граничной линии полосы движения в правой стороне направления движения и граничной линии полосы движения в левой стороне направления движения. Как проиллюстрировано на фиг. 9 и описано в следующих уравнениях 1 и 2, функция совмещения граничных линий служит для того, чтобы последовательно добавлять позиционные координаты точек на граничной линии согласно данным датчика в правой стороне направления движения и позиционные координаты точек на граничной линии согласно данным датчика в левой стороне направления движения в соответствующие столбцы матрицы в порядке от точки близко к рассматриваемому транспортному средству. В примере, проиллюстрированном на фиг. 9, например, позиционные координаты (x1L, y1L)-(x7L, y7L) семи точек добавляются в столбец матрицы для левой стороны направления движения в порядке от позиционной координаты близко к рассматриваемому транспортному средству. Помимо этого, позиционные координаты (x1R, y1R)-(x4R, y4R) четырех точек добавляются в столбец матрицы для правой стороны направления движения в порядке от позиционной координаты близко к рассматриваемому транспортному средству.
R_bound [i]={(x1R, y1R), (x2R, y2R),..., (xMR, yMR)}... (1)
L_bound [i]={(x1L, y1L), (x2L, y2L),..., (xNL, yNL)}... (2)
В вышеприведенном уравнении (1) M является числом позиционных координат точек на граничной линии согласно данным датчика, которая представляется посредством облака точек в правой стороне направления движения, и M равно четырем в примере, проиллюстрированном на фиг. 9 (это применимо и к следующему уравнению (3)). В вышеприведенном уравнении (2) N является числом позиционных координат точек на граничной линии согласно данным датчика, которая представляется посредством облака точек в левой стороне направления движения, и N равно семи в примере, проиллюстрированном на фиг. 9 (это применимо и к следующему уравнению (4)).
[0046] На этапе S110, функция совмещения граничных линий служит для того, чтобы дополнительно добавлять позиционные координаты точек на участках картографических совмещенных объектов, определенных на этапе S108, в матрицу, в которую добавляются позиционные координаты точек на граничных линиях согласно данным датчика на этапе S109. В частности, функция совмещения граничных линий служит для того, чтобы добавлять позиционные координаты точек на участках картографических совмещенных объектов, определенных на этапе S108, в матрицу (R_bound [i], L_bound [i]), в которую добавляются позиционные координаты точек на граничных линиях согласно данным датчика на этапе S109, в порядке от точки близко к рассматриваемому транспортному средству.
[0047] Через эту операцию, как описано в следующих уравнениях (3) и (4), получается матрица (R_bound [i], L_bound [i]), в которой позиционные координаты точек на участках картографических совмещенных объектов добавляются в порядке близости к рассматриваемому транспортному средству таким образом, что они соответствуют позиционным координатам точек на граничных линиях согласно данным датчика, которые также добавляются в порядке близости к рассматриваемому транспортному средству.
R_bound [i]={(x1R, y1R), (x2R, y2R),..., (xMR, yMR), (x1Rm, y1Rm), (x2Rm, y2Rm),..., (xORm, yORm)}... (3)
L_bound [i]={(x1L, y1L), (x2L, y2L),..., (xNL, yNL), (x1Lm, y1Lm), (x2Lm, y2Lm),..., (xPLm, yPLm)}... (4)
В вышеприведенном уравнении (3) O является числом позиционных координат точек на участке картографического совмещенного объекта, который представляется посредством облака точек, в правой стороне направления движения, и O равно восьми (или больше) в примере, проиллюстрированном на фиг. 9. В вышеприведенном уравнении (4) P является числом позиционных координат точек на участке картографического совмещенного объекта, который представляется посредством облака точек, в левой стороне направления движения, и P равно пяти (или больше) в примере, проиллюстрированном на фиг. 9.
[0048] Таким образом, функция совмещения граничных линий служит для того, чтобы добавлять позиционные координаты точек на граничных линиях согласно данным датчика в порядке близости к рассматриваемому транспортному средству и затем добавлять позиционные координаты точек на участках картографических совмещенных объектов также в порядке близости к рассматриваемому транспортному средству. Через эту операцию, граничные линии полосы движения, в которых совмещаются граничные линии согласно данным датчика и картографические граничные линии, могут формироваться на стороне направления движения рассматриваемого транспортного средства по сравнению с текущей позицией рассматриваемого транспортного средства. В нижеприведенном описании, граничные линии полосы движения, совмещенные на этапе S110, упоминаются "как совмещенные граничные линии".
[0049] На этапе S111, устройство 160 управления использует функцию вывода для того для того, чтобы выводить информацию относительно совмещенных граничных линий, сформированных на этапе S110. Например, функция вывода служит для того, чтобы выводить информацию относительно совмещенных граничных линий в устройство 150 управления приведением в движение. После этапа S111 выполняется этап S112, на котором устройство 150 управления приведением в движение работает с возможностью управлять приведением в движение рассматриваемого транспортного средства на основе информации относительно совмещенного вывода граничных линий на этапе S111.
[0050] Когда информация относительно совмещенных граничных линий выводится на этапе S111, устройство 160 управления использует функцию вывода для того, чтобы выводить информацию относительно совмещенных граничных линий в формате, который использует устройство 150 управления приведением в движение. В частности, когда устройство 150 управления приведением в движение использует информацию относительно совмещенных граничных линий, выражаемых посредством функции, функция вывода может служить для того, чтобы подгонять функцию, имеющую конкретный порядок, к совмещенной граничной линии, представленной посредством облака точек, за счет этого преобразуя совмещенную граничную линию, представленную посредством облака точек, в совмещенную граничную линию, выражаемую посредством функции, и выводить информацию относительно совмещенной граничной линии, выражаемой посредством функции, в устройство 150 управления приведением в движение. В альтернативной конфигурации, когда информация относительно совмещенных граничных линий, представленных посредством облака точек, выводится в устройство 150 управления приведением в движение, информация может выводиться с идентичными интервалами позиционных координат точек на совмещенных граничных линиях в случае, если форма дороги представляет собой приблизительно прямую линию, как описано выше, и информация может выводиться с уменьшенными интервалами позиционных координат точек на совмещенных граничных линиях по мере того, как увеличивается кривизна дороги в случае, если форма дороги не представляет собой прямую линию. В альтернативной конфигурации, интервалы позиционных координат точек на совмещенных граничных линиях могут определяться на основе ограничения скорости дороги или скорости рассматриваемого транспортного средства.
[0051] Как описано выше, в первом варианте осуществления, граничные линии полосы движения рядом с рассматриваемым транспортным средством на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий обнаруживаются в качестве граничных линий согласно данным датчика, и граничные линии полосы движения на запланированном маршруте движения рассматриваемого транспортного средства, полученном из картографической информации, обнаруживаются в качестве картографических граничных линий. Затем картографические граничные линии и граничные линии согласно данным датчика подвергаются перекрестной проверке и совмещаются таким образом, что диапазон за пределами граничных линий согласно данным датчика дополняется картографическими граничными линиями. Через эту операцию, даже когда ошибка обнаружения возникает в устройстве обнаружения позиции транспортного средства 120, движение рассматриваемого транспортного средства может надлежащим образом управляться в соответствии с фактическим окружением движения, поскольку план действий и запланированный маршрут могут определяться рядом с рассматриваемым транспортным средством на основе граничных линий согласно данным датчика, которые фактически обнаруживаются посредством датчика 110 обнаружения окружающих условий. С другой стороны, датчик 110 обнаружения окружающих условий не может обнаруживать граничные линии полосы движения с высокой степенью точности в диапазоне, отстоящем от рассматриваемого транспортного средства на определенное расстояние (например, несколько десятков метров) или больше. Тем не менее, в настоящем варианте осуществления, что касается такого диапазона, в котором датчик 110 обнаружения окружающих условий не может обнаруживать граничные линии полосы движения с высокой степенью точности, план действий и запланированный маршрут могут определяться на основе картографической информации, и движение рассматриваемого транспортного средства ввиду этого может надлежащим образом управляться в соответствии с будущим окружением движения.
[0052] Это описывается подробнее. Когда движение рассматриваемого транспортного средства управляется с использованием только информации относительно картографических граничных линий, если ошибка обнаружения возникает в датчике 110 обнаружения окружающих условий, движение рассматриваемого транспортного средства не может надлежащим образом управляться, поскольку управление движением рассматриваемого транспортного средства выполняется в состоянии, в котором рассматриваемое транспортное средство движется в полосе движения, отличающейся от полосы движения для фактического движения рассматриваемого транспортного средства. С другой стороны, когда движение рассматриваемого транспортного средства управляется с использованием только граничных линий согласно данным датчика, движение рассматриваемого транспортного средства не может надлежащим образом управляться в соответствии с будущим окружением движения для рассматриваемого транспортного средства, поскольку невозможно воспринимать то, какую форму дороги имеет дорога, расположенная впереди окрестностей рассматриваемого транспортного средства, и то, в какой позиции на карте движется рассматриваемое транспортное средство. Напротив, согласно настоящему варианту осуществления, граничные линии согласно данным датчика и картографические граничные линии совмещаются и выводятся, и движение рассматриваемого транспортного средства ввиду этого может надлежащим образом управляться в соответствии с фактическим окружением движения рядом с рассматриваемым транспортным средством, с одной стороны, а также в соответствии с будущим окружением движения, с другой стороны.
[0053] В настоящем варианте осуществления, картографические граничные линии и граничные линии согласно данным датчика, представленные посредством облака точек, совмещаются, чтобы формировать и выводить совмещенные граничные линии, представленные посредством облака точек. Через эту операцию, когда информация граничных линий, представленная посредством облаков точек, используется при определении действия и управлении движением, информация относительно совмещенных граничных линий, представленных посредством облака точек, может использоваться без изменений. Кроме того, в настоящем варианте осуществления, функция, имеющая конкретный порядок, подгоняется к совмещенной граничной линии, представленной посредством облака точек, чтобы за счет этого преобразовывать совмещенную граничную линию, представленную посредством облака точек, в совмещенную граничную линию, выражаемую посредством функции, и совмещенная граничная линия, выражаемая посредством функции, выводится. Это обеспечивает возможность вывода сглаженных совмещенных граничных линий, даже когда ошибка возникает в части результатов обнаружения посредством датчика 110 обнаружения окружающих условий.
[0054] Второй вариант осуществления
Далее описывается устройство 100 управления движением согласно второму варианту осуществления настоящего изобретения. Устройство 100 управления движением имеет конфигурацию, идентичную конфигурации в первом варианте осуществления, за исключением того, что оно работает следующим образом.
[0055] При совмещения граничных линий согласно данным датчика и картографических граничных линий, устройство 160 управления согласно второму варианту осуществления использует функцию совмещения граничных линий для того, чтобы определять степень надежности граничных линий согласно данным датчика, обнаруженных посредством датчика 110 обнаружения окружающих условий, на основе кривизны дороги и неразрывности кривой. Затем по мере того, как увеличивается степень надежности граничных линий согласно данным датчика, диапазон граничных линий согласно данным датчика, которые должны быть совмещены с картографическими граничными линиями, расширяется к направлению движения рассматриваемого транспортного средства, тогда как по мере того, как уменьшается степень надежности граничных линий согласно данным датчика, диапазон граничных линий согласно данным датчика, которые должны быть совмещены с картографическими граничными линиями, сжимается к направлению, противоположному направлению движения рассматриваемого транспортного средства. Таким образом, диапазон граничных линий согласно данным датчика, которые должны быть совмещены с картографическими граничными линиями, изменяется на основе степени надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий, чтобы за счет этого обеспечивать возможность надлежащей совмещения граничных линий согласно данным датчика и картографических граничных линий, даже когда точность обнаружения датчика 110 обнаружения окружающих условий ниже определенного значения. Ниже описываются подробности способа совмещения граничных линий согласно данным датчика и картографических граничных линий.
[0056] Устройство 160 управления согласно второму варианту осуществления использует функцию совмещения граничных линий для того, чтобы указывать номер полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий. Например, как проиллюстрировано на фиг. 10, функция совмещения граничных линий служит для того, чтобы выделять номера полос движения от единицы в порядке полос движения от стороны обочины дороги к центру дороги. Затем функция совмещения граничных линий служит для того, чтобы указывать номер полосы движения, соответствующий полосе движения, в которой движется рассматриваемое транспортное средство, посредством определения того, присутствует или отсутствует смежная полоса движения относительно полосы движения, в которой движется рассматриваемое транспортное средство, того, представляет собой полоса движения, в которой движется рассматриваемое транспортное средство, или нет полосу движения, ближайшую к обочине, и т.д. Например, как проиллюстрировано на фиг. 10, когда из результатов обнаружения посредством датчика 110 обнаружения окружающих условий можно воспринимать то, что смежная полоса движения не присутствует в левой стороне направления движения в полосе движения, в которой движется рассматриваемое транспортное средство, тогда как смежная полоса движения присутствует в правой стороне направления движения в полосе движения, в которой движется рассматриваемое транспортное средство, функция совмещения граничных линий может служить для того, чтобы указывать номер полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, в качестве "1", который является номером полосы движения для полосы движения, ближайшей к обочине дороги. Фиг. 10 является видом для описания способа указания номера полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство.
[0057] Помимо этого или альтернативно, когда рассматриваемое транспортное средство движется на четырехполосной дороге, аналогично примеру, проиллюстрированному на фиг. 10, и датчик 110 обнаружения окружающих условий обнаруживает бордюрные камни или дорожное ограждение, функция совмещения граничных линий может служить для того, чтобы указывать номер полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, в качестве "1", который является номером полосы движения для полосы движения на стороне обочины дороги из двух полос движения четырехполосной дороги. Хотя не проиллюстрировано, когда рассматриваемое транспортное средство движется на четырехполосной дороге, и датчик 110 обнаружения окружающих условий обнаруживает центральную разделительную полосу, желтые разделительные линии и т.п., которые задают границу между встречной полосой движения и полосой движения, в которой движется рассматриваемое транспортное средство, функция совмещения граничных линий может служить для того, чтобы указывать номер полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, в качестве "2", который является номером полосы движения для полосы движения в центральной стороне двух полос движения четырехполосной дороги.
[0058] Затем функция совмещения граничных линий служит для того, чтобы проводить перекрестную проверку граничных линий согласно данным датчика и картографических граничных линий вдоль полосы движения с указанным номером полосы движения. В примере, проиллюстрированном на фиг. 10, например, указывается то, что рассматриваемое транспортное средство движется в полосе движения с номером полосы движения "1", и ввиду этого функция совмещения граничных линий служит для того, чтобы проводить перекрестную проверку граничных линий согласно данным датчика и граничных линий полосы движения для полосы движения с номером полосы движения "1" которой обладает картографическая информация. Это обеспечивает возможность надлежащей совмещения граничных линий согласно данным датчика и картографических граничных линий в соответствии с ситуацией при движении рассматриваемого транспортного средства, даже когда, по меньшей мере, одна из точности обнаружения позиции рассматриваемого транспортного средства посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, точности результатов обнаружения посредством датчика 110 обнаружения окружающих условий и точности картографической информации является низкой.
[0059] Далее описывается процесс управления движением согласно второму варианту осуществления со ссылкой на фиг. 11. Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления движением согласно второму варианту осуществления.
[0060] На этапах S201-S204, аналогично этапам S101-S104 первого варианта осуществления, текущая позиция рассматриваемого транспортного средства обнаруживается (этап S201), поиск запланированного маршрута движения из текущей позиции в пункт назначения выполняется (этап S202), картографические граничные линии обнаруживаются из картографической информации (S203), и граничные линии согласно данным датчика обнаруживаются на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий (этап S204).
[0061] Здесь, пример, проиллюстрированный на фиг. 10, представляет собой окружение, в котором рассматриваемое транспортное средство движется на четырехполосной дороге. Граничные линии полосы движения, которые должны обнаруживаться, не ограничены граничными линиями полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, и функция обнаружения картографических граничных линий служит для того, чтобы обнаруживать граничные линии полосы движения для полос движения, в которых может двигаться рассматриваемое транспортное средство (в примере, проиллюстрированном на фиг. 10, например, для полосы движения с номером полосы движения "1", в которой движется рассматриваемое транспортное средство, и для смежной полосы движения с номером полосы движения "2"), в качестве картографических граничных линий. Это описывается подробнее. В примере, проиллюстрированном на фиг. 10, может оцениваться, что рассматриваемое транспортное средство поворачивает налево на перекрестке в соответствии с запланированным маршрутом движения рассматриваемого транспортного средства, и может выполняться определение в отношении того, что рассматриваемое транспортное средство движется в полосе движения с номером полосы движения "1", из которой рассматриваемое транспортное средство может поворачивать налево на перекрестке. В таком случае, возможен способ обнаружения только граничных линий полосы движения для полосы движения с номером полосы движения "1" в качестве картографических граничных линий. Тем не менее, другое транспортное средство, движущееся на низкой скорости, может существовать впереди рассматриваемого транспортного средства, и рассматриваемое транспортное средство может возможно выезжать за пределы полосы движения, в которой в данный момент движется рассматриваемое транспортное средство, чтобы обгонять другое транспортное средство. Следовательно, во втором варианте осуществления, граничные линии полосы движения, которые должны обнаруживаться, не ограничены граничными линиями полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, и граничные линии полосы движения для полос движения, в которых может двигаться рассматриваемое транспортное средство, обнаруживаются в качестве картографических граничных линий.
[0062] На этапе S205, функция совмещения граничных линий служит для того, чтобы проводить перекрестную проверку картографических граничных линий и граничных линий согласно данным датчика. Во втором варианте осуществления, даже когда точность позиционного обнаружения устройства 120 обнаружения позиции рассматриваемого транспортного средства, точность обнаружения датчика 110 обнаружения окружающих условий или точность информации относительно граничных линий полосы движения, которой обладает картографическая информация, ниже определенного значения, функция совмещения граничных линий служит для того, чтобы перемещать, сжимать, растягивать или вращать картографические граничные линии относительно граничных линий согласно данным датчика для того, чтобы проводить перекрестную проверку картографических граничных линий и граничных линий согласно данным датчика таким образом, что они могут надлежащим образом совмещаться.
[0063] В частности, на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий, функция совмещения граничных линий служит для того, чтобы указывать номер полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, из определения в отношении того, присутствует или отсутствует смежная полоса движения относительно полосы движения, в которой движется рассматриваемое транспортное средство, либо того, представляет собой полоса движения, в которой движется рассматриваемое транспортное средство, или нет полосу движения, ближайшую к обочине, или из типа граничных линий полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство. Затем функция совмещения граничных линий служит для того, чтобы перемещать, сжимать, растягивать или вращать картографические граничные линии относительно граничных линий согласно данным датчика таким образом, чтобы проводить перекрестную проверку граничных линий согласно данным датчика и граничных линий полосы движения, из числа картографических граничных линий, для полосы движения, номер полосы движения которой указывается.
[0064] Например, когда точность позиционного обнаружения устройства 120 обнаружения позиции рассматриваемого транспортного средства, точность обнаружения датчика 110 обнаружения окружающих условий или точность информации относительно граничных линий полосы движения, которой обладает картографическая информация, является низкой, ошибки могут возникать между картографическими граничными линиями и граничными линиями согласно данным датчика, как проиллюстрировано на фиг. 12. В случае, проиллюстрированном на фиг. 12, картографические граничные линии могут вращаться и перемещаться таким образом, что часть картографических граничных линий совпадает с граничными линиями согласно данным датчика. Фиг. 12 является видом для описания картографических граничных линий и граничных линий согласно данным датчика, когда точность позиционного обнаружения устройства 120 обнаружения позиции рассматриваемого транспортного средства, точность обнаружения датчика 110 обнаружения окружающих условий или точность информации относительно граничных линий полосы движения, которой обладает картографическая информация, является низкой.
[0065] Когда картографические граничные линии могут перемещаться, сжиматься, расширяться или вращаться относительно граничных линий согласно данным датчика для того, чтобы за счет этого обнаруживать участки картографических граничных линий, которые совпадают с граничными линиями согласно данным датчика, функция совмещения граничных линий служит для того, чтобы сохранять состояние перемещения, сжатия, расширения или вращения картографических граничных линий в RAM устройства 160 управления.
[0066] На этапе S206, аналогично этапу S106 первого варианта осуществления, выполняется определение в отношении того, существуют или нет участки, которые совпадают с граничными линиями согласно данным датчика, в картографических граничных линиях. Когда участки, которые совпадают с граничными линиями согласно данным датчика, существуют в картографических граничных линиях, процедура переходит к этапу S207. Когда участки, которые совпадают с граничными линиями согласно данным датчика, не существуют в картографических граничных линиях, процедура переходит к этапу S214, или процесс управления движением, проиллюстрированный на фиг. 11, завершается.
[0067] На этапе S207, функция совмещения граничных линий служит для того, чтобы определять степень надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий. Когда кривизна дороги меньше определенного значения, и форма дороги представляет собой прямую линию или форму, приблизительно подобную прямой линии, ошибка обнаружения датчика 110 обнаружения окружающих условий зачастую является небольшой по сравнению со случаем кривой, в которой кривизна дороги не меньше определенного значения. Ввиду этого, когда кривизна дороги меньше предварительно определенного значения, функция совмещения граничных линий служит для того, чтобы определять более высокую степень надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий по сравнению со случаем, в котором кривизна дороги не меньше предварительно определенного значения. В дополнительной или альтернативной конфигурации, функция совмещения граничных линий может определять более низкую степень надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий по мере того, как увеличивается кривизна дороги. Когда дорога представляет собой кривую, и кривая включает в себя две или более смежных кривых, ошибка обнаружения датчика 110 обнаружения окружающих условий имеет тенденцию быть большой по сравнению со случаем, в котором кривая не включает в себя смежных кривых. Ввиду этого, в дополнительной или альтернативной конфигурации, когда кривая включает в себя две или более смежных кривых, функция совмещения граничных линий может определять более низкую степень надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий по сравнению со случаем, в котором кривая не включает в себя смежных кривых. В дополнительной или альтернативной конфигурации, когда кривая включает в себя смежные кривые, имеющие различную кривизну, функция совмещения граничных линий может определять более низкую степень надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий по сравнению со случаем, в котором кривая включает в себя смежные кривые, имеющие аналогичную кривизну.
[0068] На этапе S208, функция совмещения граничных линий служит для того, чтобы определять участки граничных линий из числа граничных линий согласно данным датчика, которые должны быть совмещены с картографическими граничными линиями (эти участки граничных линий в дальнейшем упоминаются как "участки совмещенных объектов согласно данным датчика") на основе степени надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий, определенной на этапе S207. Фиг. 13 является видом, иллюстрирующим пример отношения соответствия между степенью надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий и размером участков совмещенных объектов согласно данным датчика. Как проиллюстрировано на фиг. 13, по мере того, как увеличивается степень надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий, функция совмещения граничных линий служит для того, чтобы увеличивать участки совмещенных объектов согласно данным датчика (увеличивать расстояния от рассматриваемого транспортного средства до участков совмещенных объектов согласно данным датчика). С другой стороны, по мере того, как уменьшается степень надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий, функция совмещения граничных линий служит для того, чтобы уменьшать участки совмещенных объектов согласно данным датчика (уменьшать расстояния от рассматриваемого транспортного средства до участков совмещенных объектов согласно данным датчика).
[0069] В примере, проиллюстрированном на фиг. 14, например, степень надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий является высокой, и ввиду этого участки в пределах диапазона в диапазоне обнаружения для граничных линий согласно данным датчика от позиции рассматриваемого транспортного средства до самой дальней позиции от рассматриваемого транспортного средства (например, участки граничных линий согласно данным датчика, указываемые посредством серого цвета в фиг. 14) определяются в качестве участков совмещенных объектов согласно данным датчика. Таким образом, в примере, проиллюстрированном на фиг. 14, все граничные линии согласно данным датчика определяются в качестве участков совмещенных объектов согласно данным датчика. С другой стороны, в примере, проиллюстрированном на фиг. 15, степень надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий является низкой, и ввиду этого участки граничных линий согласно данным датчика от позиции рассматриваемого транспортного средства до точки относительно близко к рассматриваемому транспортному средству (например, участки граничных линий согласно данным датчика, указываемых посредством серого цвета в фиг. 15) определяются в качестве участков совмещенных объектов согласно данным датчика. Фиг. 14 и фиг. 15 являются видами для описания способа совмещения участков совмещенных объектов согласно данным датчика и участков картографических совмещенных объектов.
[0070] На этапе S209, функция совмещения граничных линий служит для того, чтобы обнаруживать участки картографических граничных линий, которые расположены на стороне направления движения рассматриваемого транспортного средства по сравнению с текущей позицией рассматриваемого транспортного средства и которые получаются посредством вычитания участков, соответствующих участкам совмещенных объектов согласно данным датчика, обнаруженным на S208, из картографических граничных линий, в качестве участков картографических совмещенных объектов. Например, как проиллюстрировано на фиг. 14 и фиг. 15, функция совмещения граничных линий служит для того, чтобы указывать точки на картографических граничных линиях, которые соответствуют самым дальним точкам на участках совмещенных объектов согласно данным датчика от рассматриваемого транспортного средства, в качестве целевых точек S1 и S2. Затем функция совмещения граничных линий может служить для того, чтобы обнаруживать участки картографических граничных линий, которые расположены на стороне направления движения рассматриваемого транспортного средства по сравнению с целевыми точками S1 и S2 (участки в направлении отступления от рассматриваемого транспортного средства), в качестве участков картографических совмещенных объектов.
[0071] На этапе S210, как описано в следующих уравнениях (5) и (6), функция совмещения граничных линий служит для того, чтобы выполнять процесс добавления позиционных координат точек на участках совмещенных объектов согласно данным датчика, определенных на этапе S208, в пустую матрицу, которая предварительно сохраняется в RAM устройства 160 управления.
R_bound [i]={(x1R, y1R), (x2R, y2R),..., (xMR, yMR)}... (5)
L_bound [i]={(x1L, y1L), (x2L, y2L),..., (xNL, yNL)}... (6)
В вышеприведенном уравнении (5), M является числом позиционных координат точек на участке совмещенного объекта согласно данным датчика, который представляется посредством облака точек в правой стороне направления движения, и M равно четырем в примере, проиллюстрированном на фиг. 14, или двум в примере, проиллюстрированном на фиг. 15 (это применимо и к следующему уравнению (7)). В вышеприведенном уравнении (6) N является числом позиционных координат точек на участке совмещенного объекта согласно данным датчика, который представляется посредством облака точек в левой стороне направления движения, и N равно семи в примере, проиллюстрированном на фиг. 14, или двум в примере, проиллюстрированном на фиг. 15 (это применимо и к следующему уравнению (8)).
[0072] На этапе S211, как описано в следующих уравнениях (7) и (8), функция совмещения граничных линий служит для того, чтобы дополнительно добавлять позиционные координаты точек на участках картографических совмещенных объектов, определенных на этапе S209, в матрицу, в которую добавляются позиционные координаты точек на участках совмещенных объектов согласно данным датчика на этапе S210.
R_bound [i]={(x1R, y1R), (x2R, y2R),..., (xMR, yMR), (x1Rm, y1Rm), (x2Rm, y2Rm),..., (xORm, yORm)}... (7)
L_bound [i]={(x1L, y1L), (x2L, y2L),..., (xNL, yNL), (x1Lm, y1Lm), (x2Lm, y2Lm),..., (xPLm, yPLm)}... (8)
В вышеприведенном уравнении (7), O является числом позиционных координат точек на участке картографического совмещенного объекта, который представляется посредством облака точек в правой стороне направления движения, и O равно восьми (или больше) в примере, проиллюстрированном на фиг. 14, или десяти (или больше) в примере, проиллюстрированном на фиг. 15. В вышеприведенном уравнении (8), P является числом позиционных координат точек на участке картографического совмещенного объекта, который представляется посредством облака точек в левой стороне направления движения, и P равно четырем (или больше) в примере, проиллюстрированном на фиг. 14, или девяти (или больше) в примере, проиллюстрированном на фиг. 15.
[0073] Таким образом, во втором варианте осуществления, позиционные координаты точек на участках совмещенных объектов согласно данным датчика добавляются в порядке близости к рассматриваемому транспортному средству, и затем позиционные координаты точек на участках картографических совмещенных объектов добавляются также в порядке близости к рассматриваемому транспортному средству. Это обеспечивает возможность формирования совмещенных граничных линий, при котором участки совмещенных объектов согласно данным датчика и участки картографических совмещенных объектов совмещаются на стороне направления движения рассматриваемого транспортного средства по сравнению с текущей позицией рассматриваемого транспортного средства.
[0074] Затем на этапах S212 и S213, аналогично этапам S111 и S112 первого варианта осуществления, информация относительно совмещенных граничных линий, сформированных на этапе S211, выводится, например, в устройство 150 управления приведением в движение (этап S212), и управление приведением в движение для рассматриваемого транспортного средства выполняется на основе выходной информации совмещенных граничных линий (этап S213).
[0075] Когда, на этапе S206, участки, которые совпадают с граничными линиями согласно данным датчика, не могут обнаруживаться в картографических граничных линиях, процедура переходит к этапу S214. Когда участки, которые совпадают с граничными линиями согласно данным датчика, не могут обнаруживаться в картографических граничных линиях, как указано выше, предполагается, что устройство 120 обнаружения позиции рассматриваемого транспортного средства не может надлежащим образом обнаруживать позицию рассматриваемого транспортного средства. Следовательно, на этапе S214, функция совмещения граничных линий служит для того, чтобы оценивать позицию рассматриваемого транспортного средства на основе запланированного маршрута движения рассматриваемого транспортного средства и скорости рассматриваемого транспортного средства.
[0076] На этапе S215, функция совмещения граничных линий служит для того, чтобы определять то, что граничные линии согласно данным датчика, обнаруженные на этапе S204, представляют собой граничные линии полосы движения, обнаруженные в позиции рассматриваемого транспортного средства, оцененной на этапе S214, и на основе этого, определять участки картографических совмещенных объектов. Таким образом, функция совмещения граничных линий служит для того, чтобы обнаруживать участки, которые расположены на стороне направления движения рассматриваемого транспортного средства по сравнению с текущей позицией рассматриваемого транспортного средства, и которые получаются посредством вычитания участков граничных линий согласно данным датчика, обнаруженных в оцененной позиции рассматриваемого транспортного средства, из картографических граничных линий, в качестве участков картографических совмещенных объектов.
[0077] Затем на этапе S210, все граничные линии согласно данным датчика, обнаруженные на этапе S204, используются в качестве участков совмещенных объектов согласно данным датчика, и позиционные координаты точек на участках совмещенных объектов согласно данным датчика (т.е. всех граничных линий согласно данным датчика) добавляются в матрицу. На этапе S211, позиционные координаты точек на участках картографических совмещенных объектов, определенных на этапе S215, добавляются в матрицу. Через эту операцию, информация относительно совмещенных граничных линий выводится в устройство 150 управления приведением в движение на этапе S212, и управление приведением в движение для рассматриваемого транспортного средства выполняется на этапе S213.
[0078] Как описано выше, во втором варианте осуществления, степень надежности граничных линий согласно данным датчика, обнаруженных посредством датчика 110 обнаружения окружающих условий, определяется на основе кривизны дороги, неразрывности кривой и т.д. Затем по мере того, как увеличивается степень надежности граничных линий согласно данным датчика, участки совмещенных объектов согласно данным датчика, которые должны быть совмещены с картографическими граничными линиями, расширяются к направлению движения рассматриваемого транспортного средства, тогда как по мере того, как уменьшается степень надежности граничных линий согласно данным датчика, участки совмещенных объектов согласно данным датчика уменьшаются к направлению, противоположному направлению движения рассматриваемого транспортного средства. Через эту операцию, когда точность обнаружения датчика 110 обнаружения окружающих условий не ниже определенного значения, участки совмещенных объектов согласно данным датчика на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий могут использоваться в качестве широких участков, и высокоточная информация совмещенных граничных линий может выводиться в соответствии с фактической ситуацией при движении рассматриваемого транспортного средства. Кроме того, даже когда точность обнаружения датчика 110 обнаружения окружающих условий ниже определенного значения, участки совмещенных объектов согласно данным датчика ограничены участками рядом с рассматриваемым транспортным средством, и высокоточная информация совмещенных граничных линий ввиду этого может выводиться.
[0079] Во втором варианте осуществления, полоса движения, в которой движется рассматриваемое транспортное средство, указывается на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий, и граничные линии согласно данным датчика и картографические граничные линии подвергаются перекрестной проверке вдоль указанной полосы движения, чтобы совмещать граничные линии согласно данным датчика и картографические граничные линии. Через эту операцию, даже когда, по меньшей мере, одна из точности обнаружения позиции рассматриваемого транспортного средства посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, точности результатов обнаружения посредством датчика 110 обнаружения окружающих условий и точности картографической информации является низкой (точность ниже определенного значения), совмещенные граничные линии могут выводиться в соответствии с ситуацией при движении рассматриваемого транспортного средства.
[0080] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0081] Например, в вышеописанных одном или более вариантов осуществления настоящего изобретения, примерно иллюстрируется конфигурация, в которой картографическая информация получается из картографической базы 130 данных устройства 100 управления движением, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, устройство 100 управления движением работает с возможностью получать картографическую информацию из сервера, существующего за пределами устройства 100 управления движением. В дополнительной или альтернативной конфигурации, информация относительно граничных линий полосы движения маршрута, по которому фактически движется другое транспортное средство, может получаться из другого транспортного средства (или из сервера, который собирает информацию из другого транспортного средства), в качестве информации относительно граничных линий полосы движения картографической информации.
[0082] В дополнительной или альтернативной конфигурации, когда точность обнаружения позиции рассматриваемого транспортного средства посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, точность результатов обнаружения посредством датчика 110 обнаружения окружающих условий и точность картографической информации не ниже соответствующих предварительно определенных значений для определения, может выполняться процесс управления движением согласно первому варианту осуществления. В дополнительной или альтернативной конфигурации, когда, по меньшей мере, одна из точности обнаружения позиции рассматриваемого транспортного средства посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, точности результатов обнаружения посредством датчика 110 обнаружения окружающих условий и точности картографической информации ниже соответствующего предварительно определенного значения для определения, может выполняться вышеописанный процесс управления движением согласно второму варианту осуществления. Это обеспечивает возможность совмещения картографических граничных линий и граничных линий согласно данным датчика в более точных позициях, когда точность обнаружения датчиков устройства 100 управления движением и/или точность картографической информации является высокой, и ввиду этого могут выводиться высокоточные совмещенные граничные линии. Кроме того, даже когда точность обнаружения датчиков и/или точность картографической информации является низкой, совмещенные граничные линии могут выводиться с относительно высокой степенью точности через ограничение диапазона граничных линий согласно данным датчика, которые должны быть совмещены с картографическими граничными линиями, оценку полосы движения, в которой движется рассматриваемое транспортное средство, и совмещение граничных линий согласно данным датчика и картографических граничных линий в оцененной полосе движения.
[0083] В вышеописанном втором варианте осуществления, примерно иллюстрируется конфигурация, в которой когда участки, которые совпадают с граничными линиями согласно данным датчика, могут проверяться в картографических граничных линиях, участки совмещенных объектов согласно данным датчика определяются на основе степени надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий, и определенные участки совмещенных объектов согласно данным датчика и участки картографических совмещенных объектов совмещаются, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, участки совмещенных объектов согласно данным датчика определяются на основе степени надежности результатов обнаружения посредством датчика 110 обнаружения окружающих условий, и проверяется то, существуют или нет участки, которые совпадают с граничными линиями согласно данным датчика, в картографических граничных линиях.
[0084] В вышеописанном втором варианте осуществления, примерно иллюстрируется конфигурация, в которой номер полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, указывается на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий, и картографические граничные линии и граничные линии согласно данным датчика подвергаются перекрестной проверке вдоль полосы движения с указанным номером полосы движения, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться следующая конфигурация. В этой конфигурации, номер полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, указывается на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий, и номер полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, также указывается на основе картографической информации и позиционной информации рассматриваемого транспортного средства, обнаруженной посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства. После этого, когда номер полосы движения, указываемый на основе результатов обнаружения посредством датчика 110 обнаружения окружающих условий, является идентичным с номером полосы движения, указываемым на основе позиционной информации рассматриваемого транспортного средства, обнаруженной посредством устройства 120 обнаружения позиции рассматриваемого транспортного средства, картографические граничные линии и граничные линии согласно данным датчика подвергаются перекрестной проверке вдоль полосы движения с этим номером полосы движения.
[0085] Датчик 110 обнаружения окружающих условий в вышеописанных вариантах осуществления соответствует средству обнаружения настоящего изобретения.
Описание номеров ссылок
[0086] 100 - устройство управления движением
110 - датчик обнаружения окружающих условий
120 - устройство обнаружения позиции рассматриваемого транспортного средства
130 - картографическая база данных
140 - устройство представления
150 - устройство управления приведением в движение
160 - устройство управления
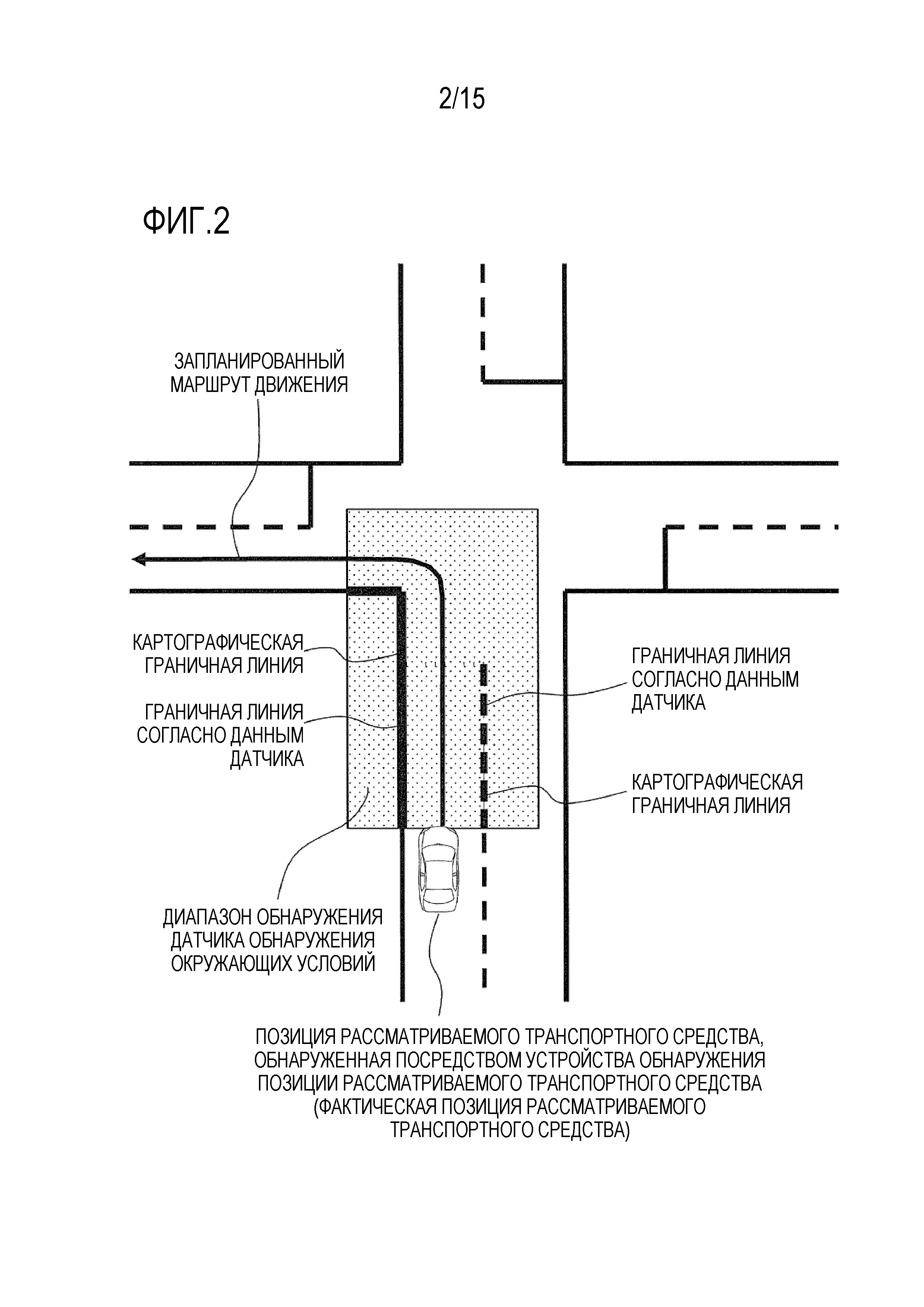
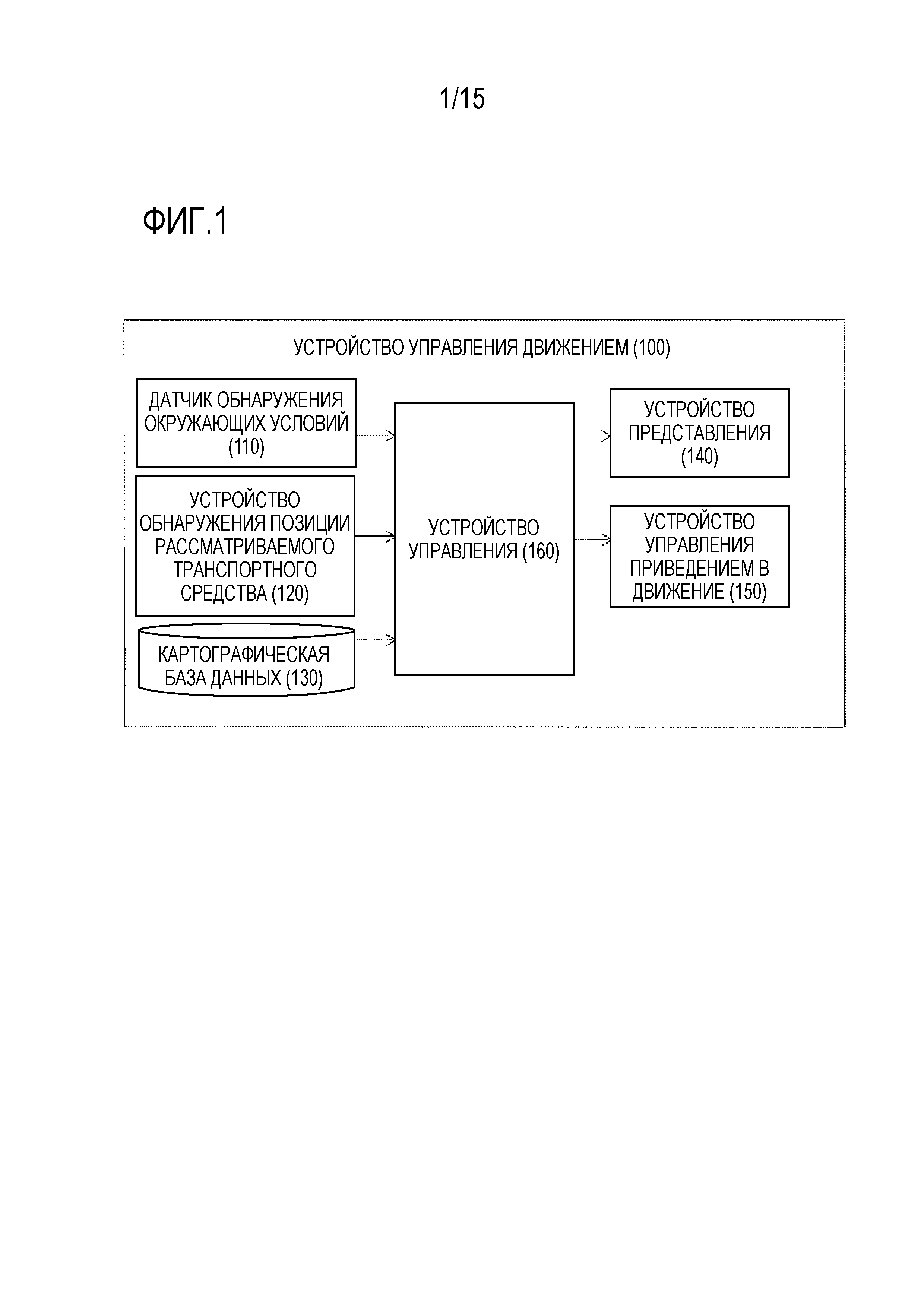
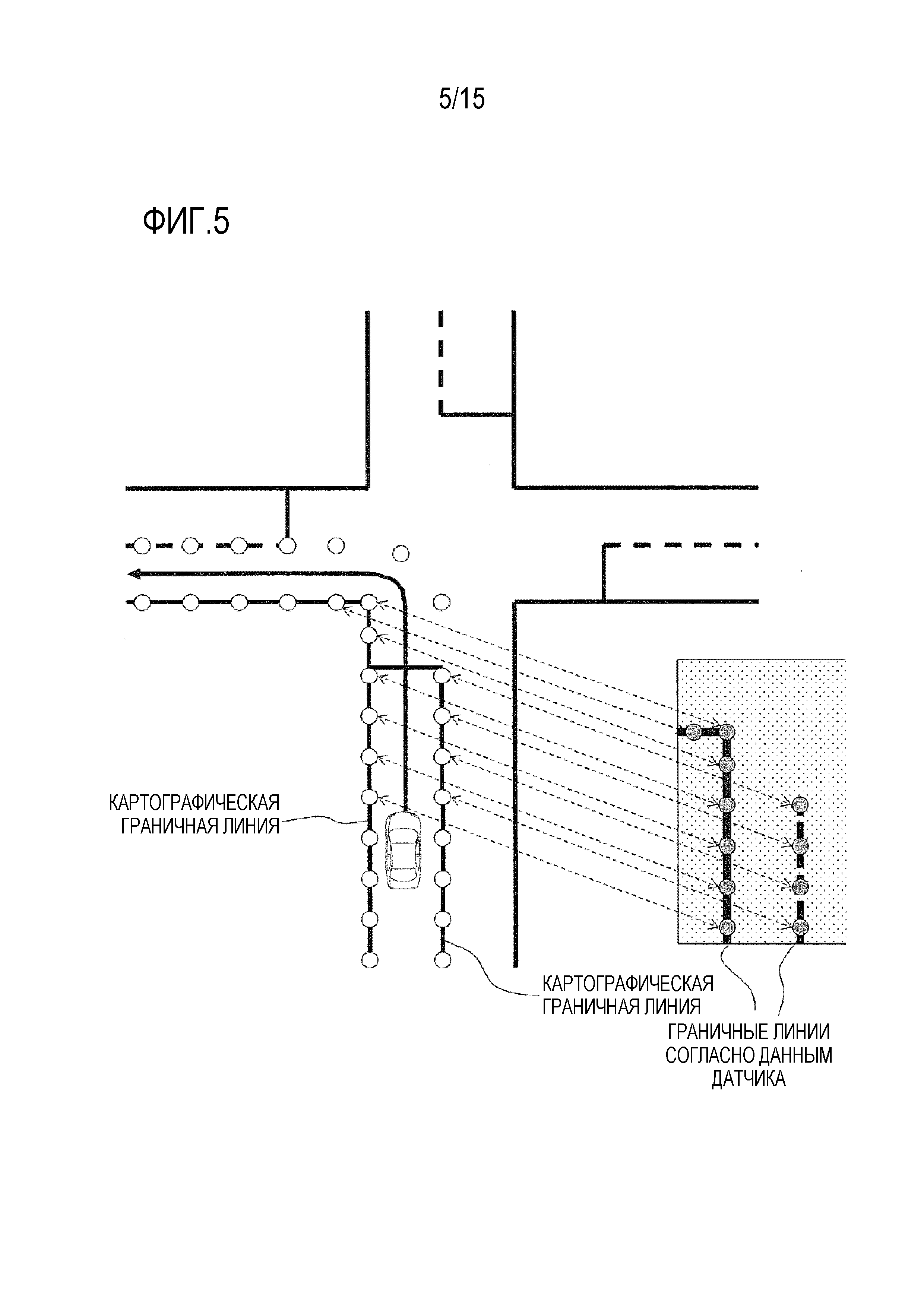
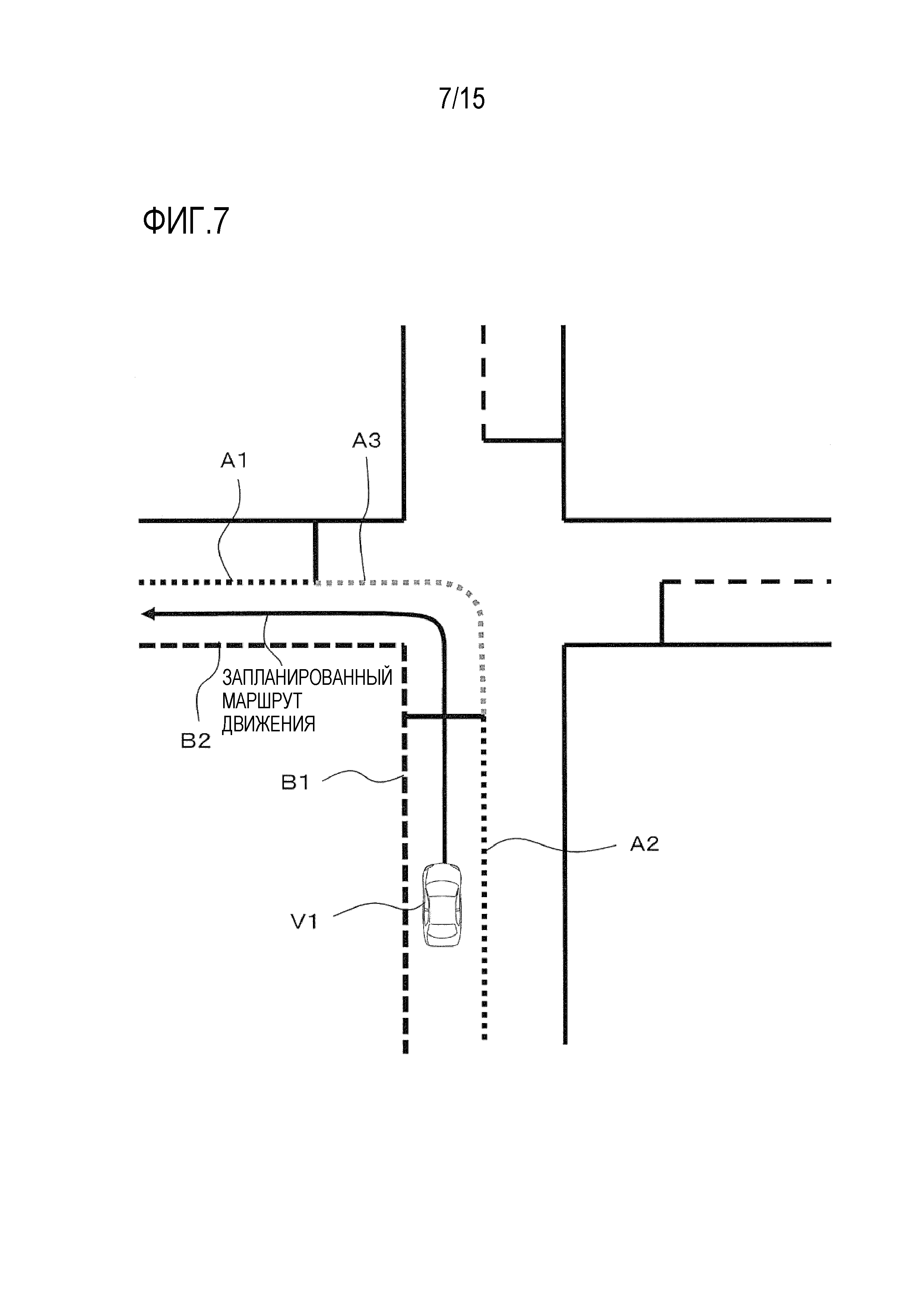
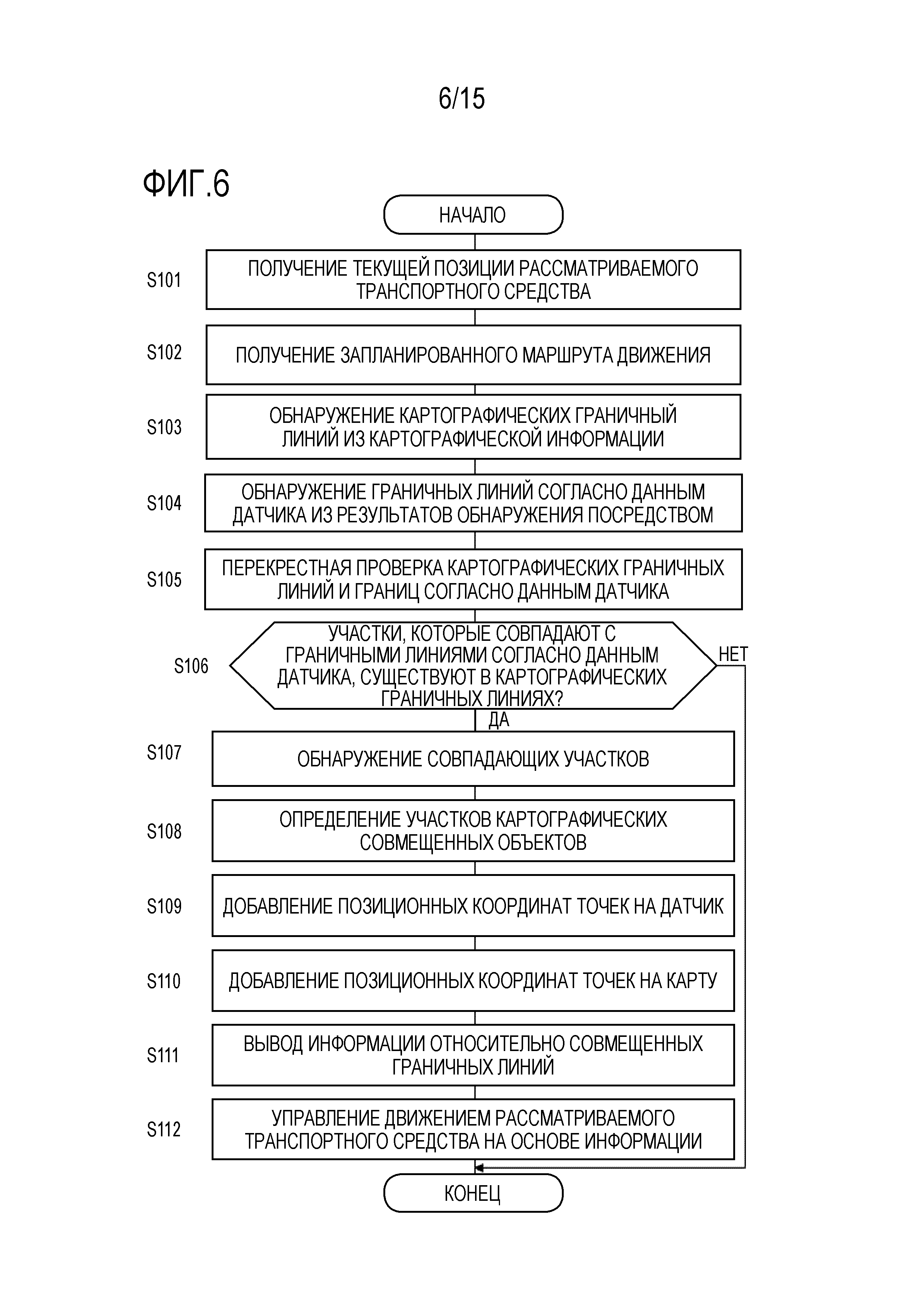
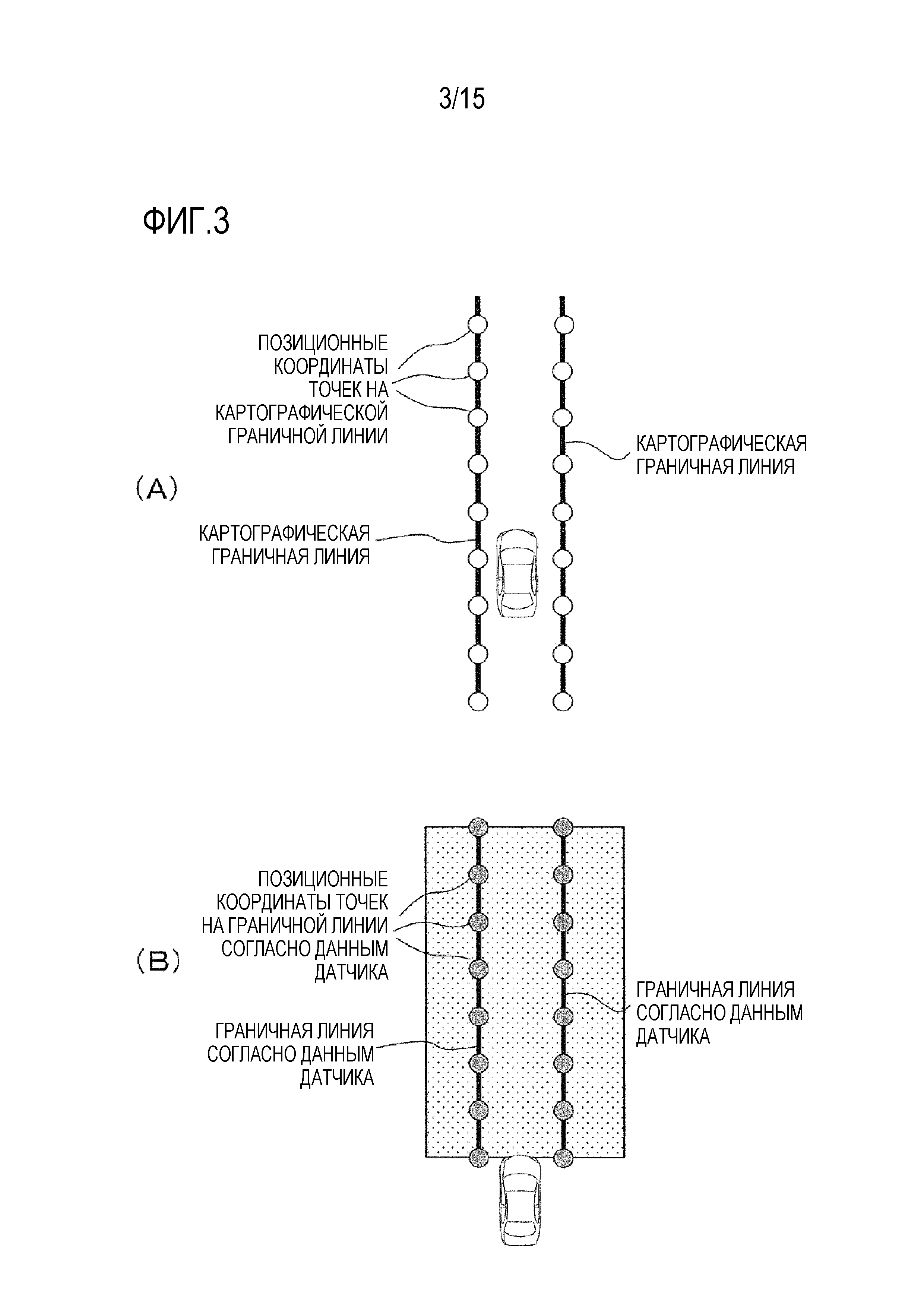
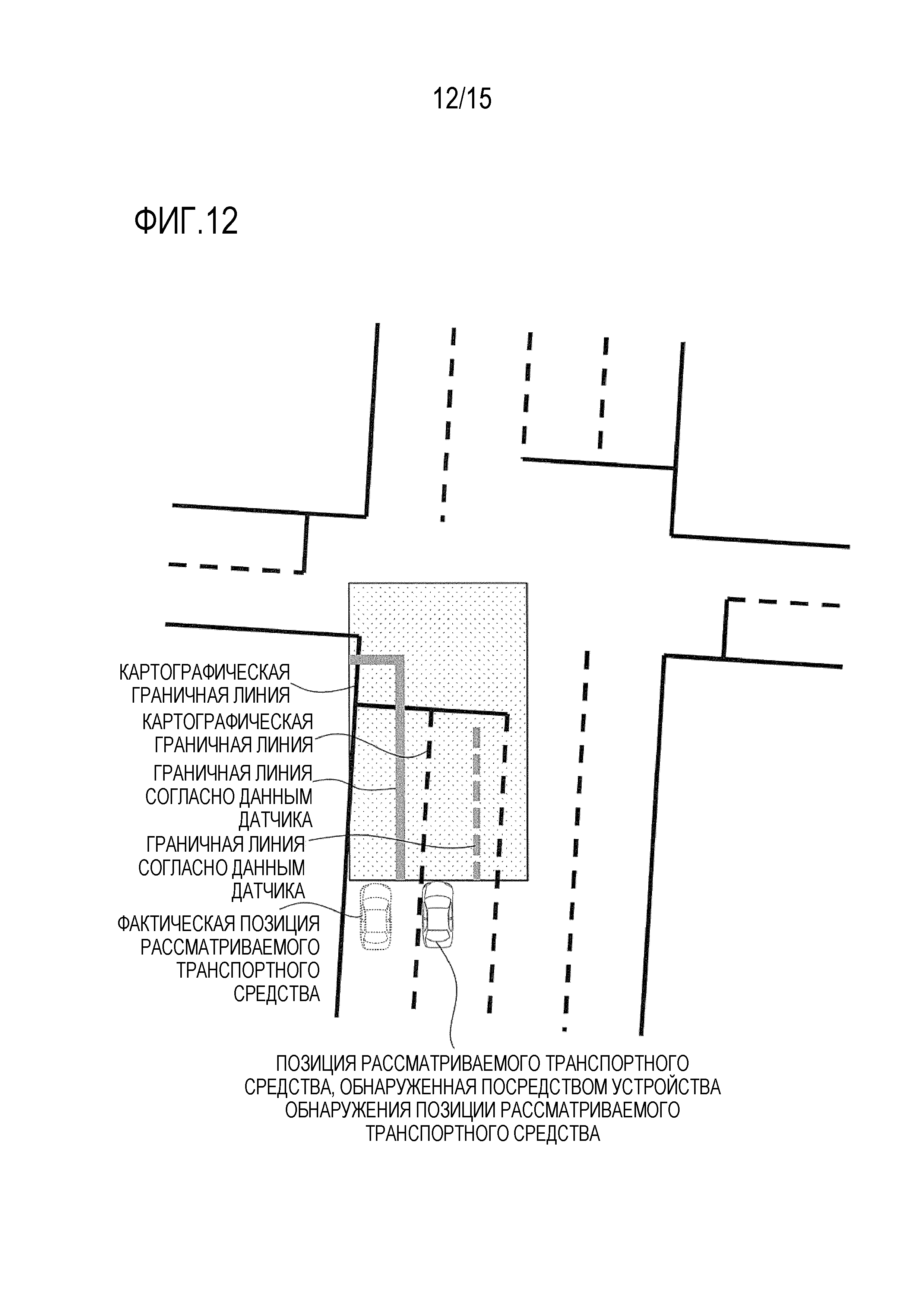
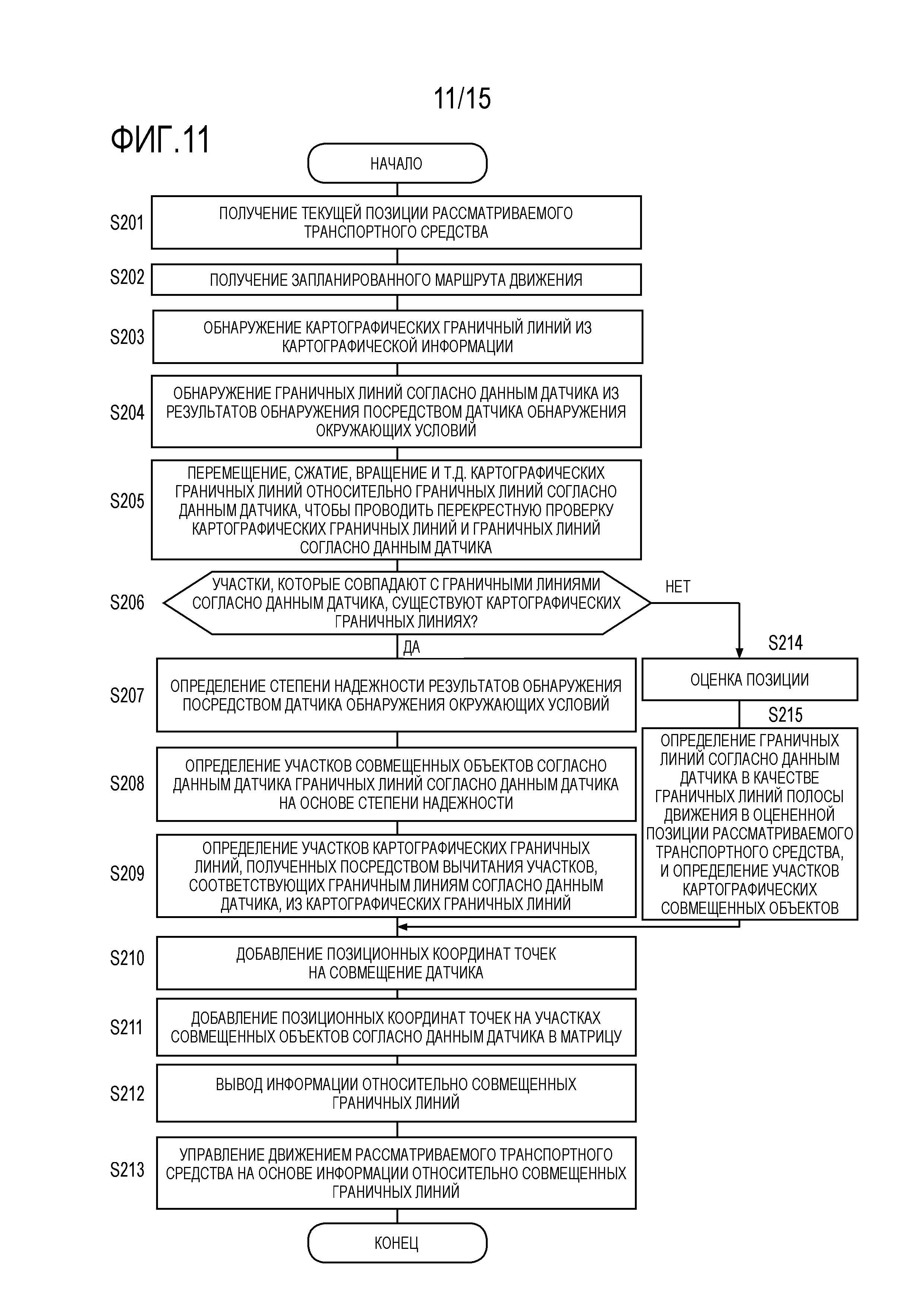
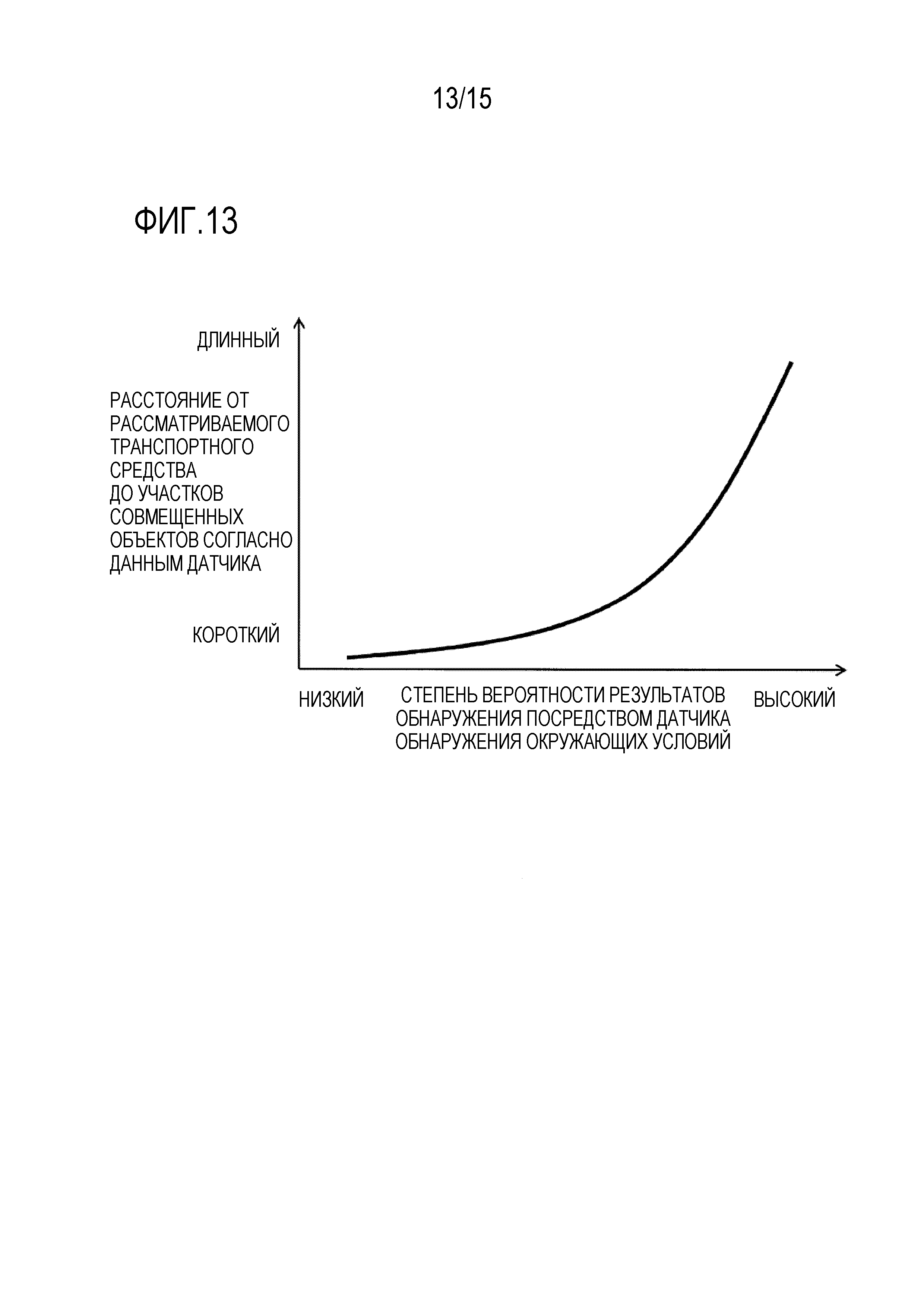
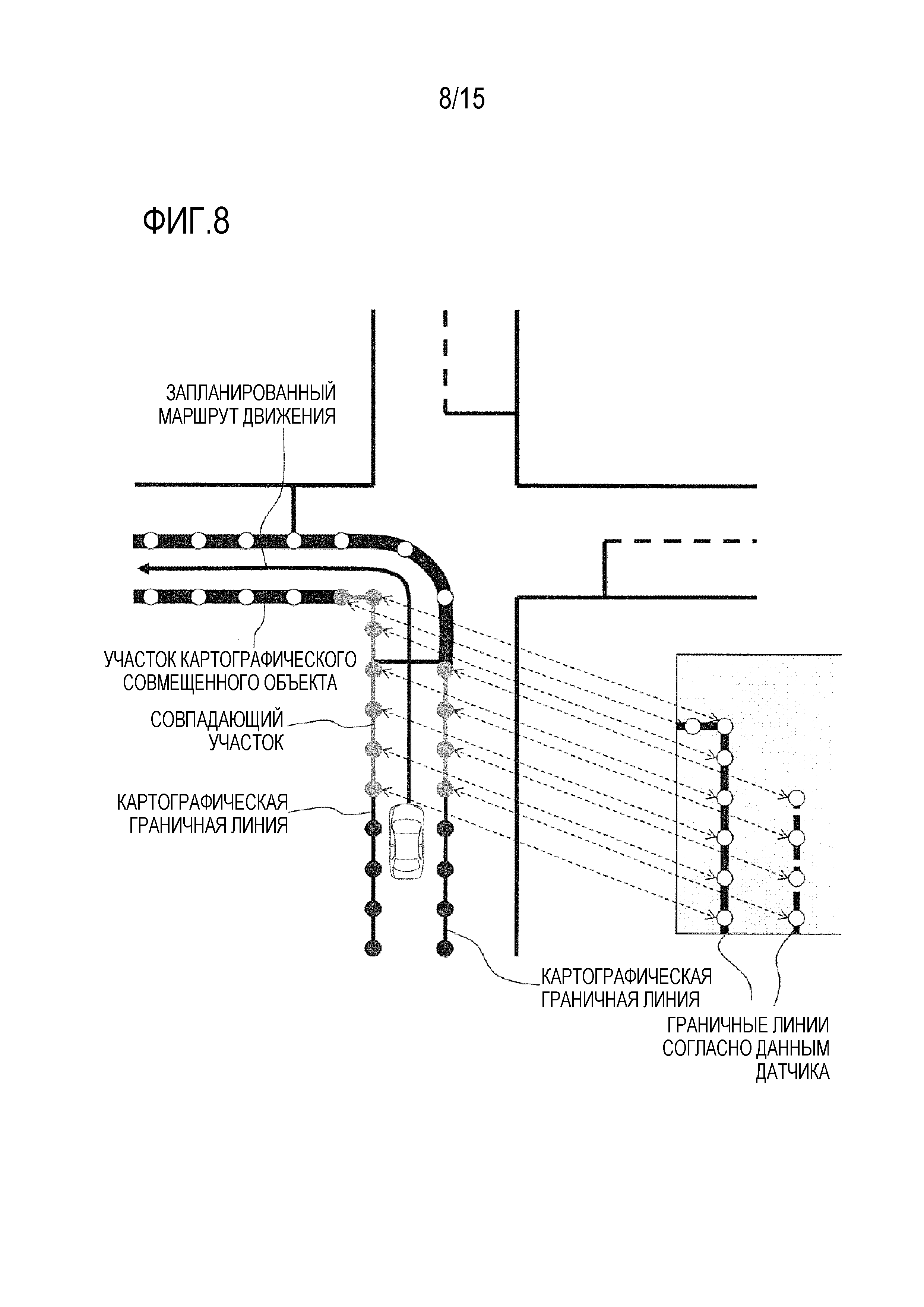
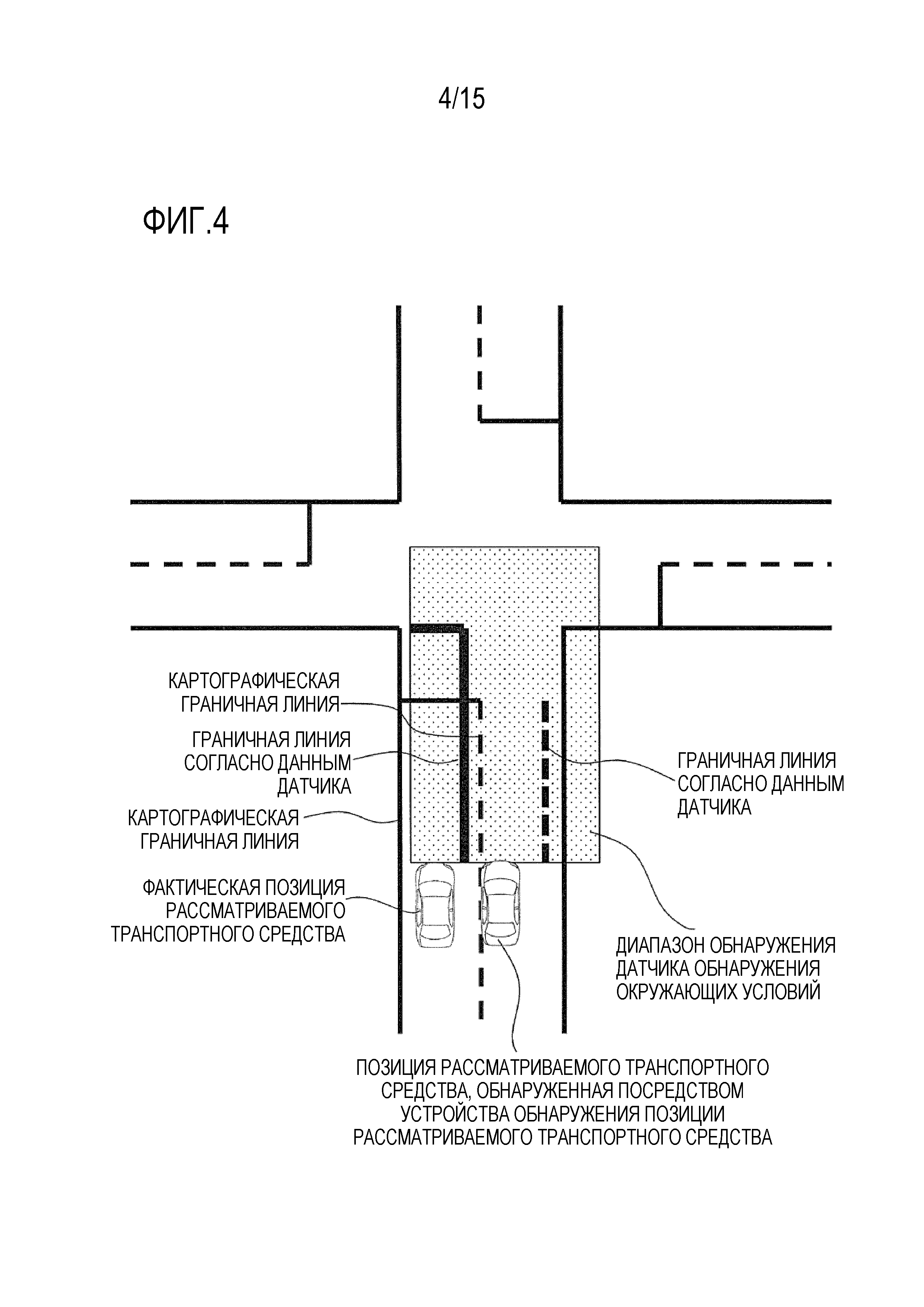
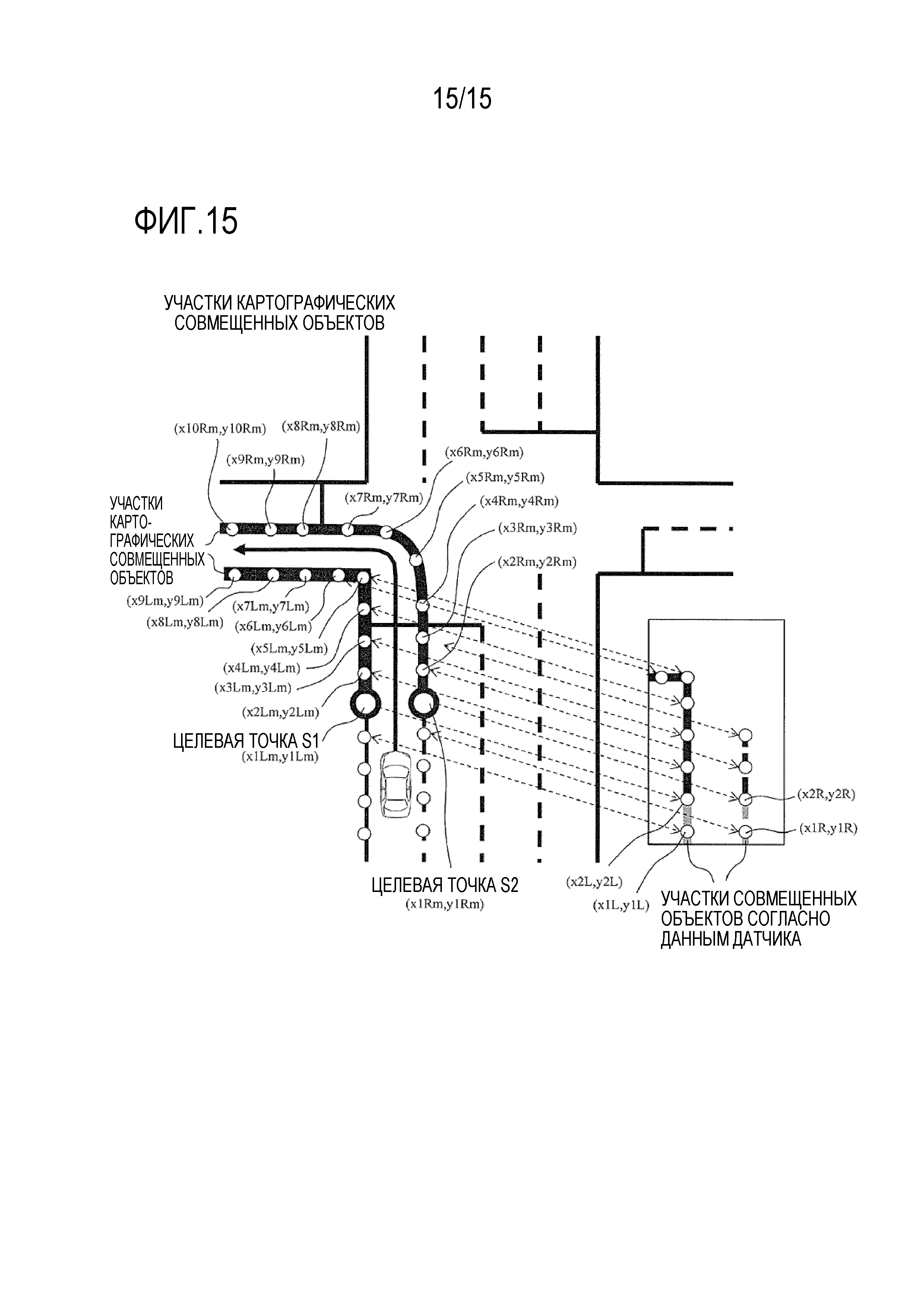
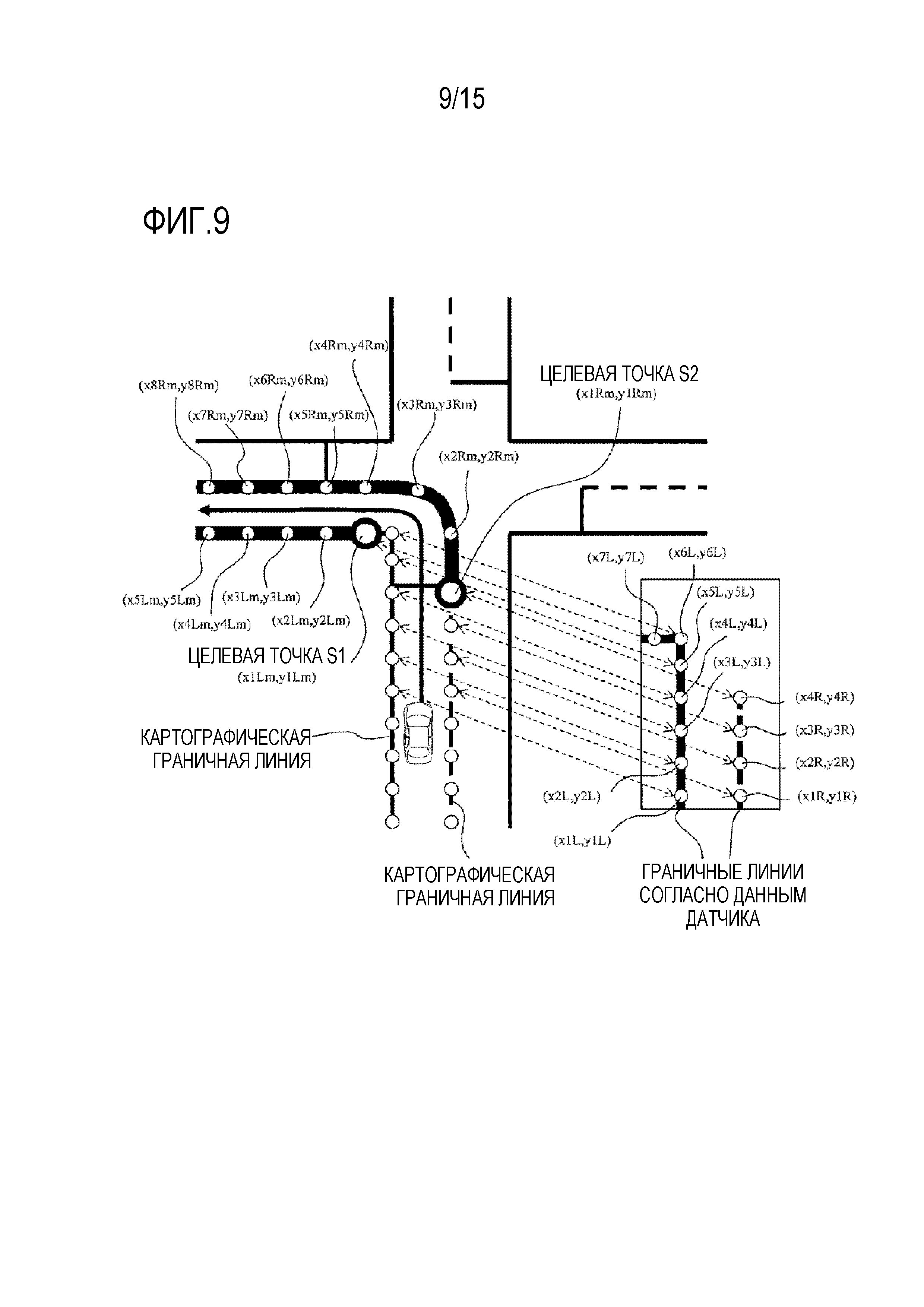
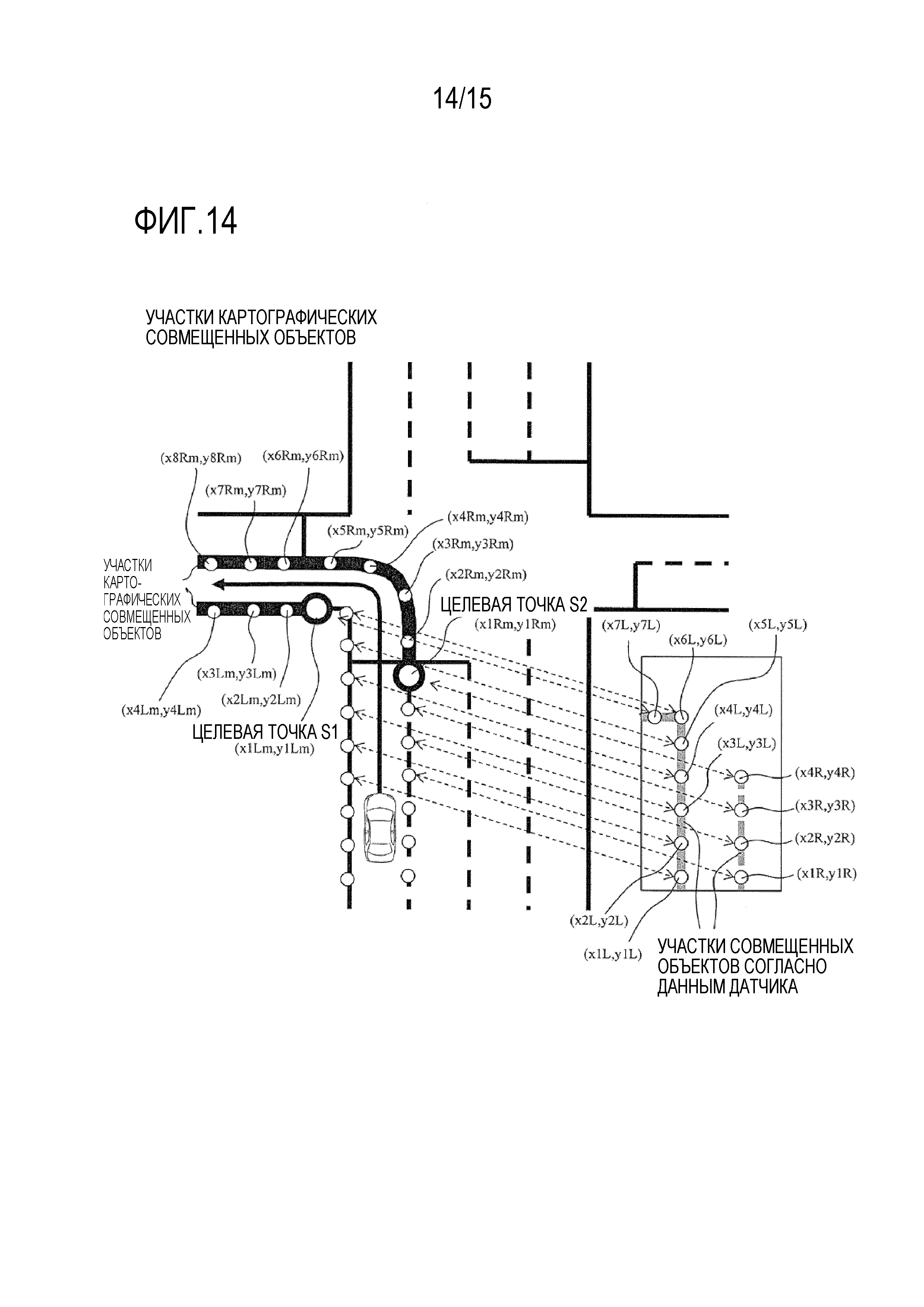
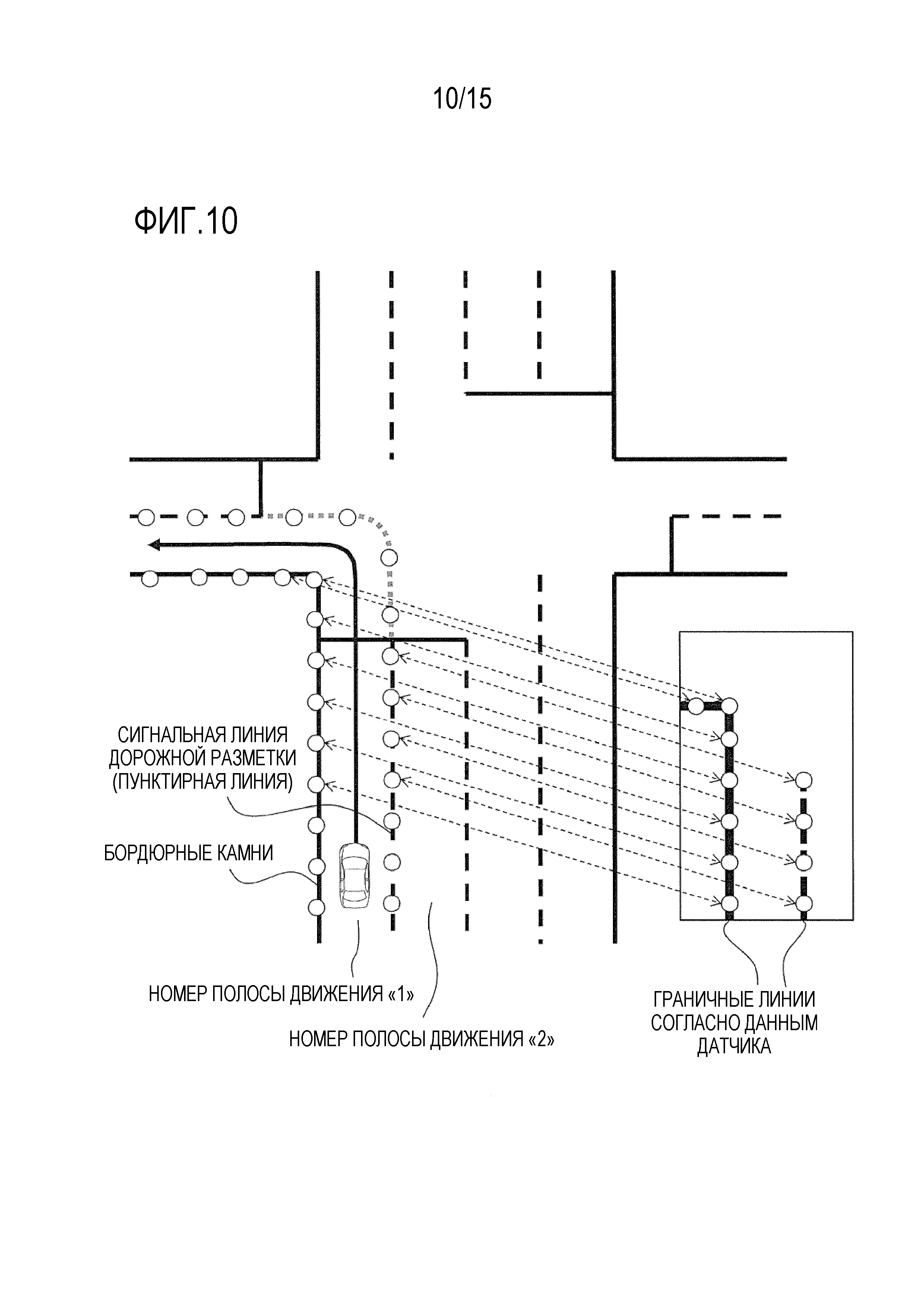
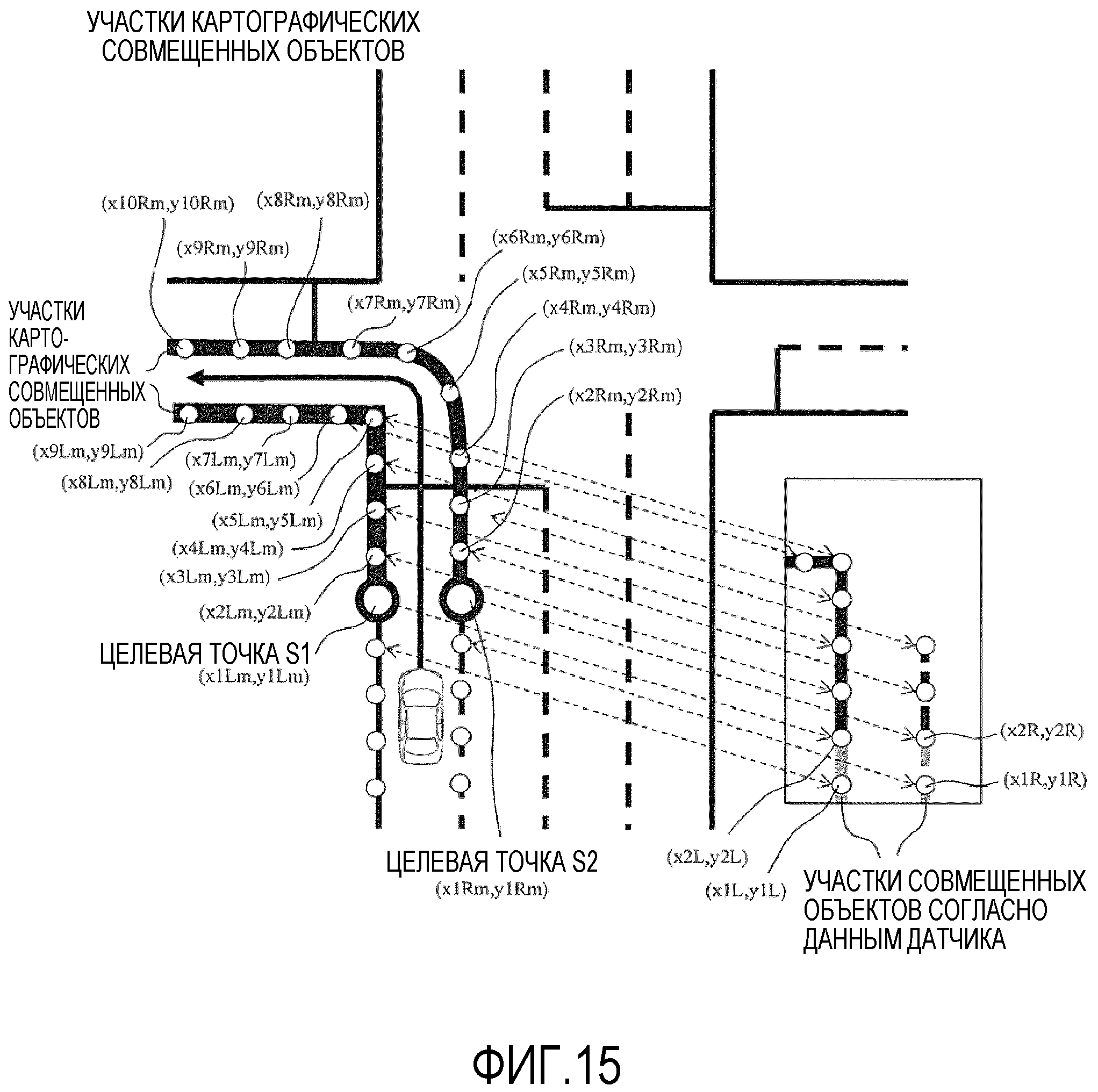
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство вычисления маршрута движения
Устройство вычисления маршрута движения
Устройство планирования вождения, аппаратура содействия при движении и способ планирования вождения
Устройство помощи при вождении
Устройство определения окружения, аппаратура содействия при движении и способ определения окружения
Способ и устройство управления движением
Способ для управления движением транспортного средства и устройство для управления движением транспортного средства

