Результат интеллектуальной деятельности: УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству помощи при вождении, которое помогает в вождении транспортного средства.
Уровень техники
[0002] До настоящего времени известны системы направления по маршруту, которые выполняют направление по маршруту, чтобы предоставлять возможность перемещения между полосами движения. Например, патентный документ 1 раскрывает систему направления по маршруту, выполненную с возможностью находить искомый маршрут, задавать точку направления на основе искомого маршрута, задавать стандартную точку направления по маршруту для упомянутой точки направления и определять, присутствует ли запретная зона для смены полосы движения на искомом маршруте, от начальной точки направления по маршруту на основе стандартной точки направления по маршруту до упомянутой точки направления. Запретная зона для смены полосы движения является зоной, в которой перемещение между полосами движения запрещается. Когда запретная зона для смены полосы движения присутствует, точка направления по маршруту задается на ближней стороне посредством значения, к которому прибавляется протяженность запретной зоны для смены полосы движения. Когда транспортное средство прибывает в точку направления по маршруту, система направления по маршруту выполняет процесс голосового вывода, чтобы выводить руководство по маршруту голосами относительно перекрестка, для которого должно быть дано руководство.
Документ предшествующего уровня техники
Патентный документ
[0003] Патентный документ 1 JP2007-127416A
Сущность изобретения
Задачи, которые должны быть решены изобретением
[0004] Когда вышеописанная технология патентного документа 1 применяется к транспортному средству, и транспортное средство меняет полосы движения в соответствии с направлением по маршруту, фактическое изменение полосы движения может быть выполнено в соответствии с окружающими условиями дорожного движения и т.п. Согласно вышеописанной методике патентного документа 1, однако, точка направления по маршруту задается только на основе протяженности запретной зоны для смены полосы движения. Когда изменение полосы движения выполняется в соответствии с направлением по маршруту из патентного документа 1, следовательно, затруднительно для транспортного средства обнаруживать окружающие изменения по маршруту навигации, и соответствующее изменение полосы движения не может быть выполнено.
[0005] Задачей, которая должна быть решена посредством настоящего изобретения, является предоставление устройства помощи при вождении, которое может выполнять надлежащие изменения полос движения.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему следующим образом. Местоположение изменения полос движения и контрольная точка задаются на маршруте движения на основе позиции рассматриваемого транспортного средства и картографической информации. Местоположение изменения полос движения - это местоположение, в котором рассматриваемое транспортное средство должно изменять полосы движения. Контрольная точка находится впереди местоположения изменения полос движения в направлении движения рассматриваемого транспортного средства. Точка, в которой рассматриваемое транспортное средство должно завершать изменение полос движения, задается в качестве точки завершения изменения полос движения на основе диапазона обнаружения блока обнаружения и позиции контрольной точки.
Преимущества изобретения
[0007] Согласно настоящему изобретению, точка, в которой изменение полосы движения должно быть завершено, задается для контрольной точки на основе диапазона обнаружения блока обнаружения, который обнаруживает окружающие условия для рассматриваемого транспортного средства. Когда изменение полосы движения завершается в этой точке, изменения окружающей обстановки на маршруте движения могут легко быть обнаружены посредством блока обнаружения. Надлежащие изменения полос движения могут, следовательно, быть выполнены.
Краткое описание чертежей
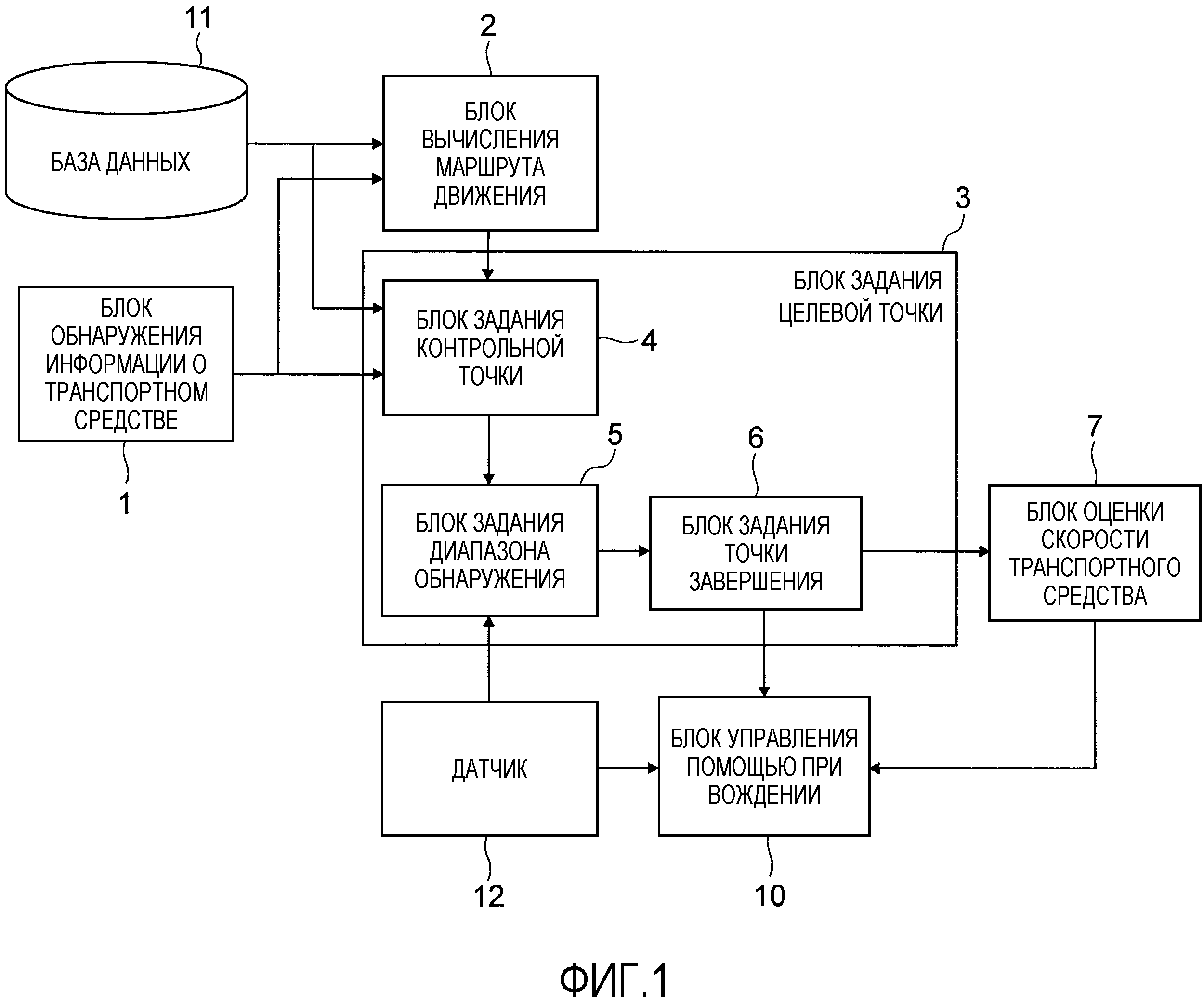
[0008] Фиг. 1 - это блок-схема устройства помощи при вождении согласно варианту осуществления настоящего изобретения.
Фиг 2 - это блок-схема последовательности операций, иллюстрирующая алгоритм управления устройства помощи при вождении.
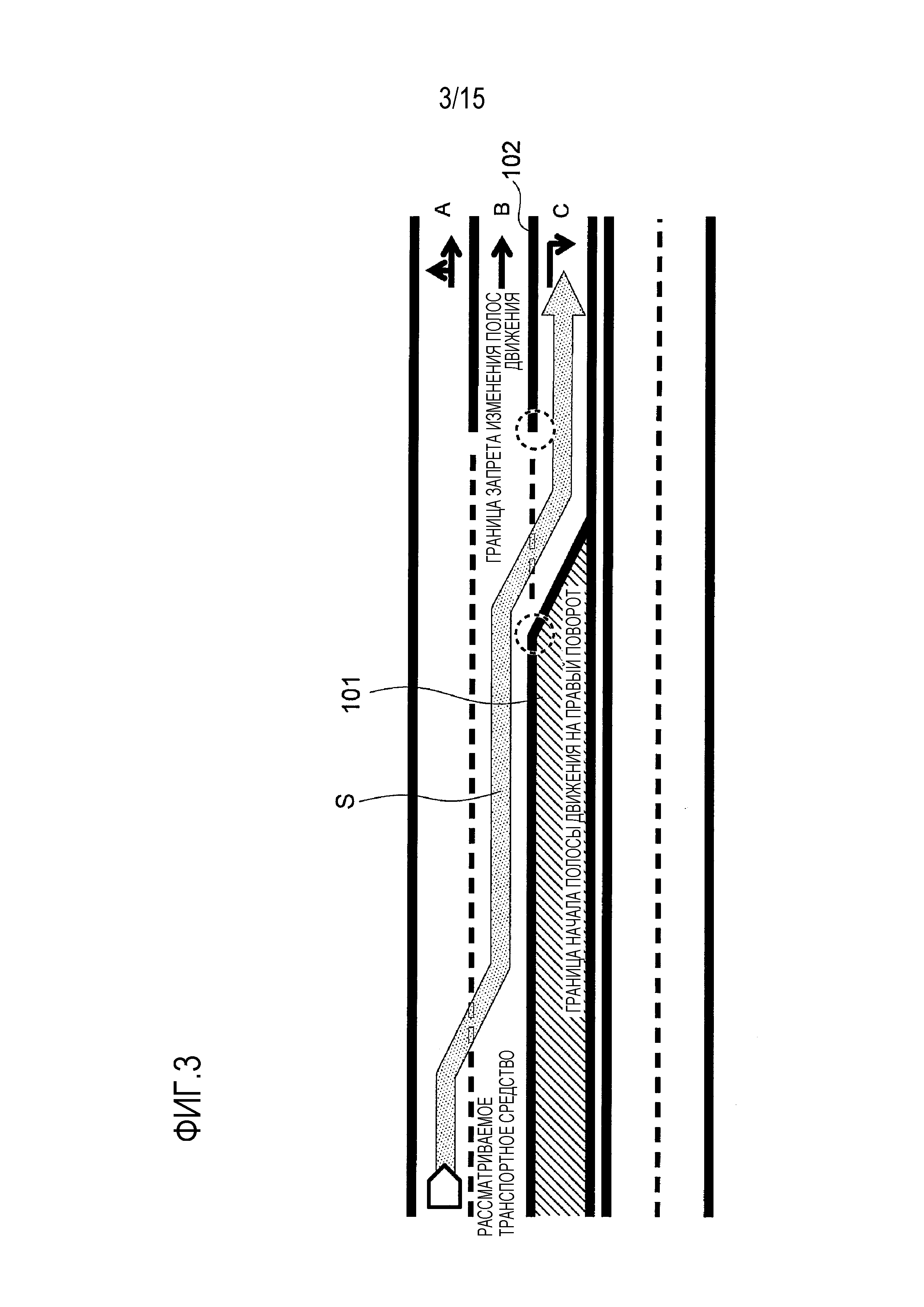
Фиг. 3 - это вид, иллюстрирующий пример планировки дороги.
Фиг. 4 - это вид, иллюстрирующий пример планировки дороги.
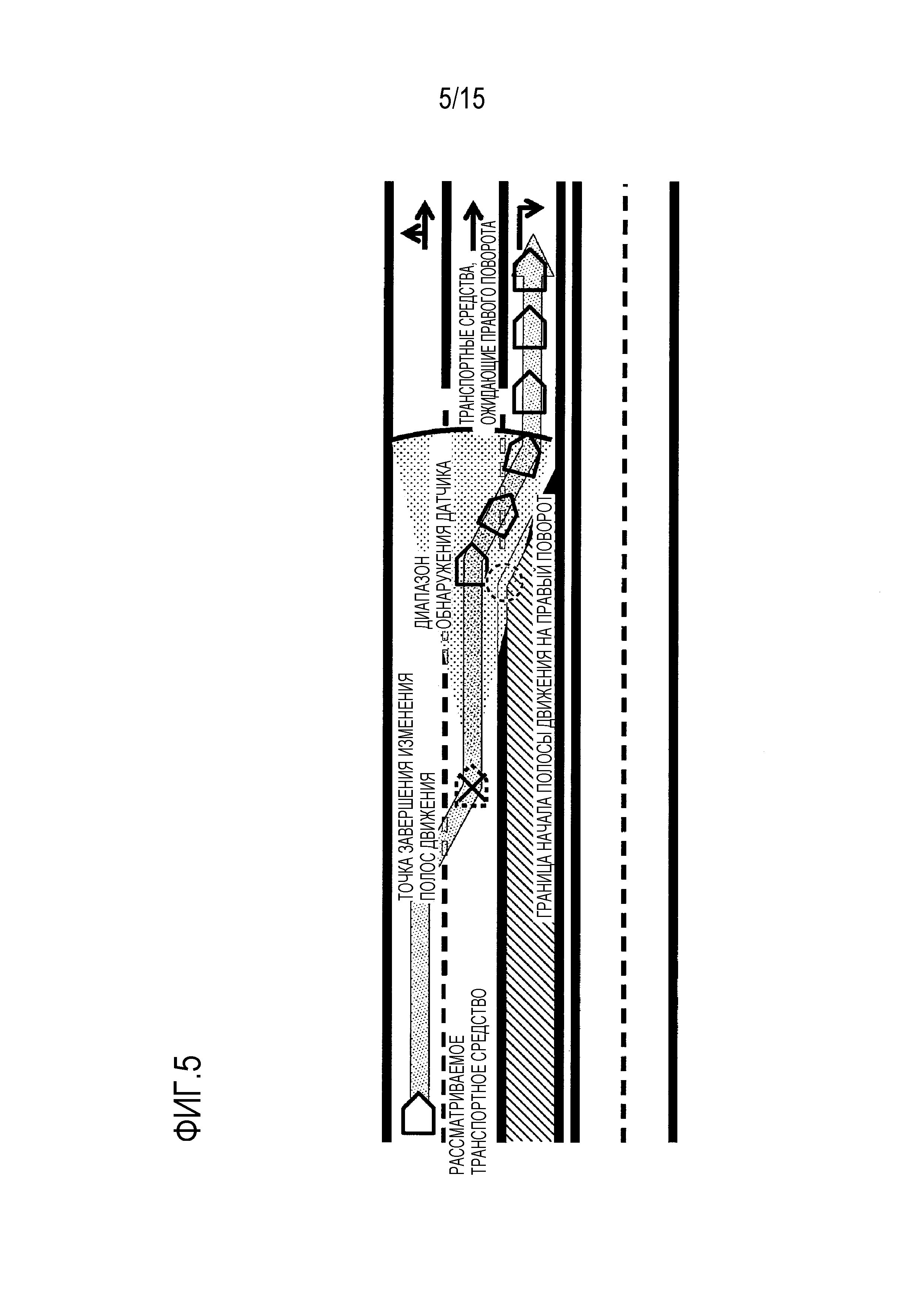
Фиг. 5 - это вид, иллюстрирующий пример планировки дороги.
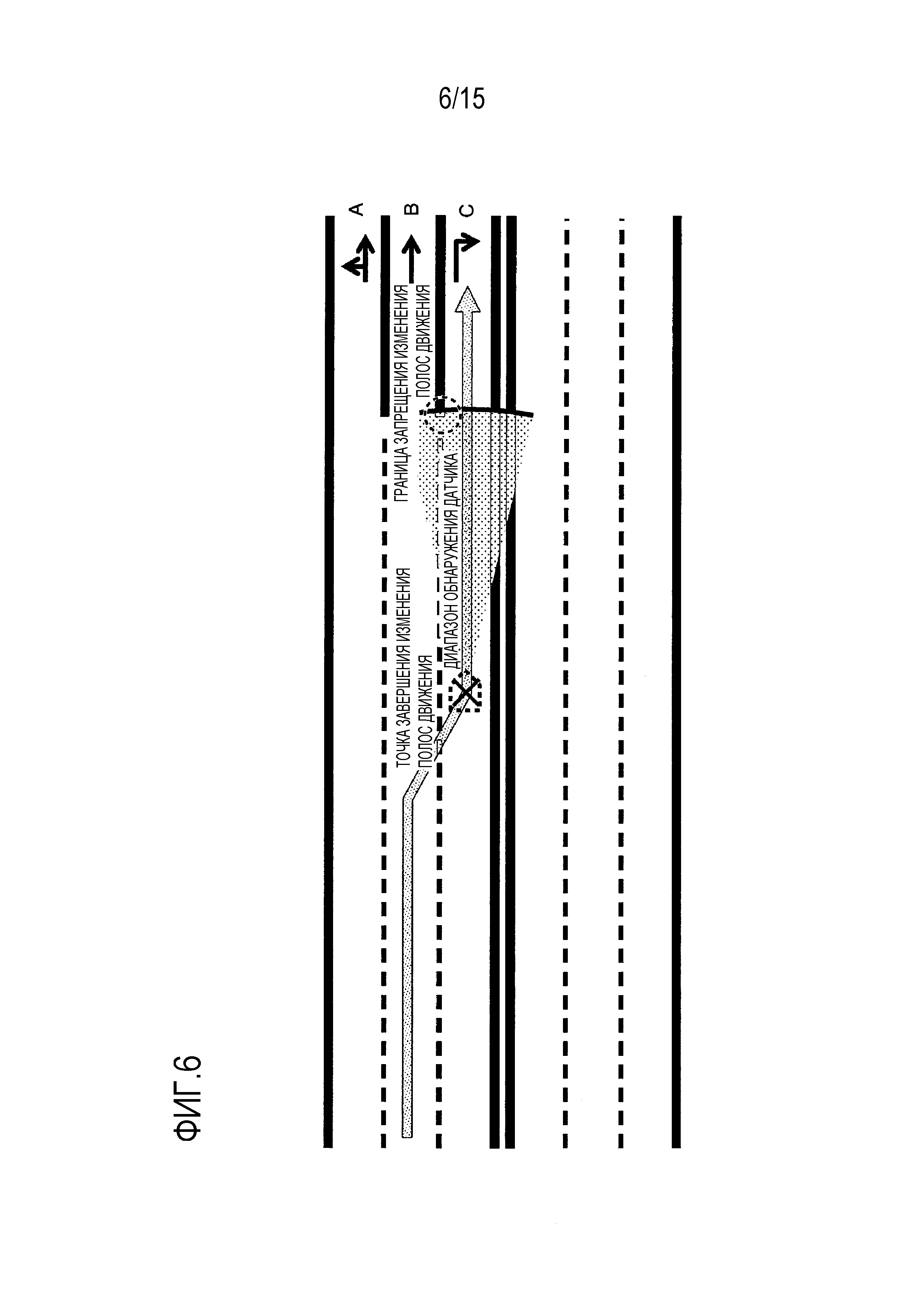
Фиг. 6 - это вид, иллюстрирующий пример планировки дороги.
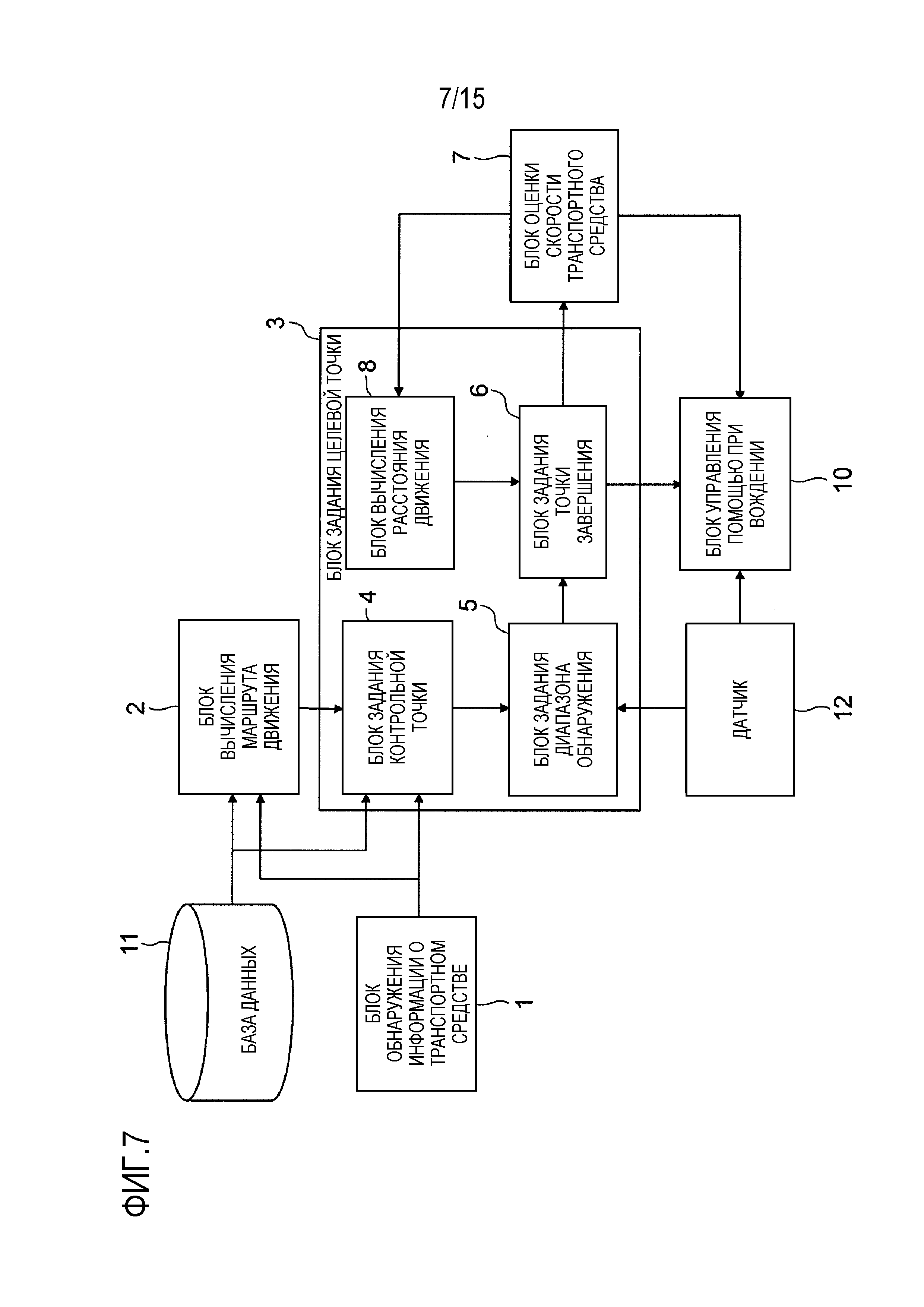
Фиг. 7 - это блок-схема устройства помощи движению согласно другому варианту осуществления настоящего изобретения.
Фиг 8 - это блок-схема последовательности операций, иллюстрирующая алгоритм управления устройства помощи при вождении.
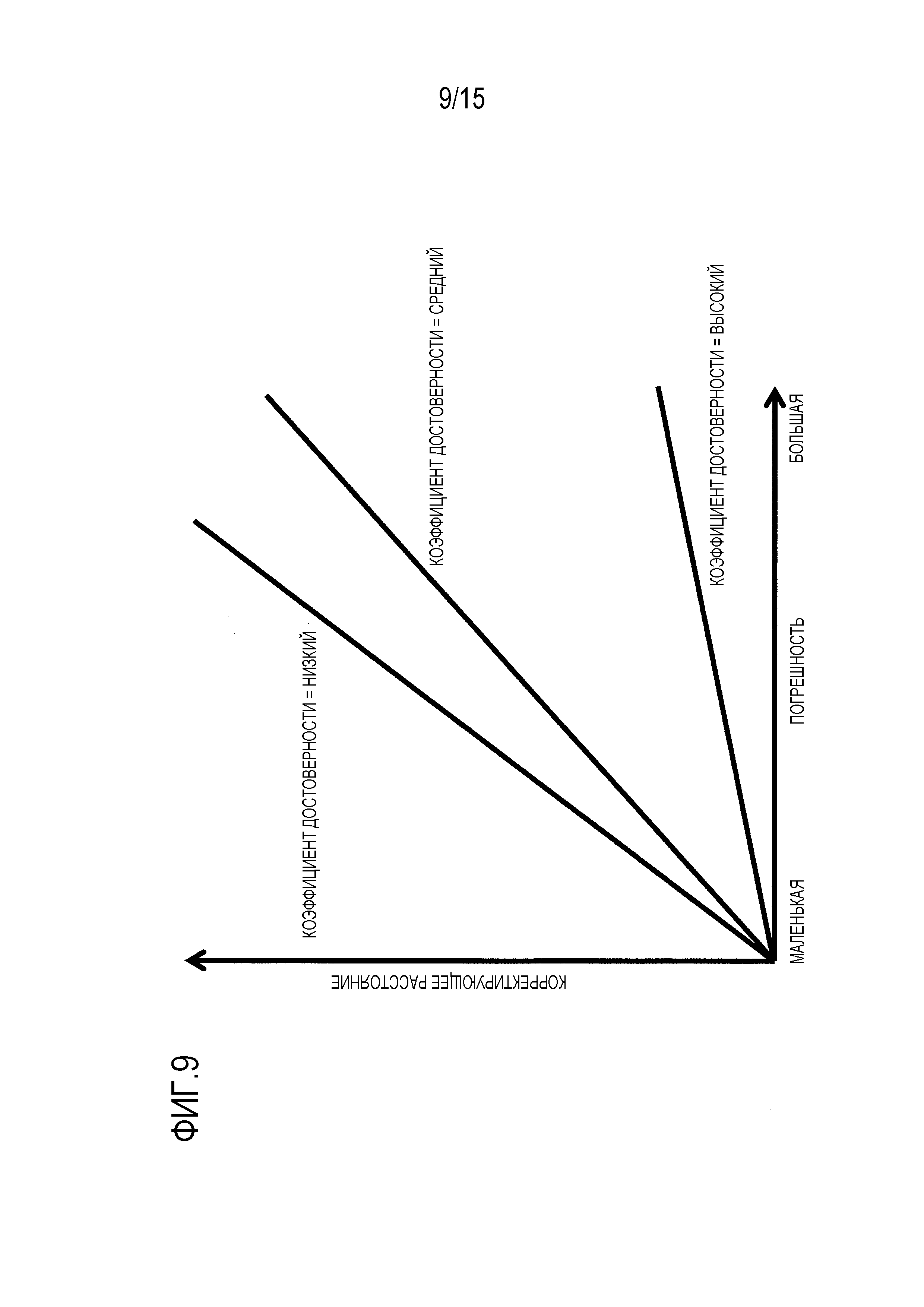
Фиг. 9 - это график, иллюстрирующий соотношение между погрешностью, коэффициентом достоверности и корректирующим расстоянием.
Фиг. 10 - это вид, иллюстрирующий пример планировки дороги.
Фиг. 11 - это вид, иллюстрирующий пример планировки дороги.
Фиг. 12 - это блок-схема устройства помощи движению согласно еще одному варианту осуществления настоящего изобретения.
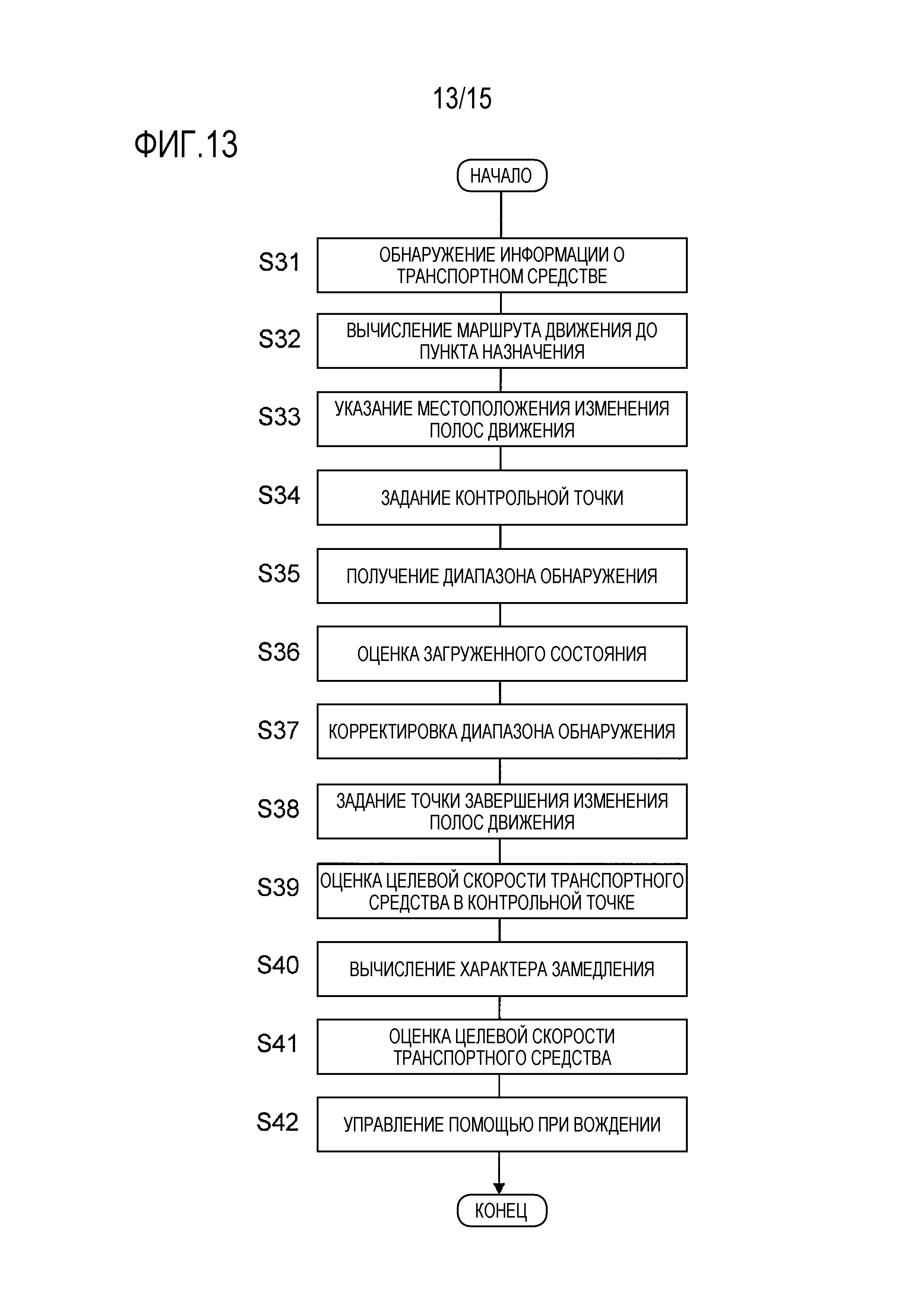
Фиг 13 - это блок-схема последовательности операций, иллюстрирующая алгоритм управления устройства помощи при вождении.
Фиг. 14 - это схематичный вид для описания диапазона обнаружения датчика.
Фиг. 15 - это график, иллюстрирующий соотношение между загруженным состоянием и корректирующим расстоянием.
Оптимальный режим(ы) осуществления изобретения
[0009] Далее в данном документе, варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи.
"Первый вариант осуществления"
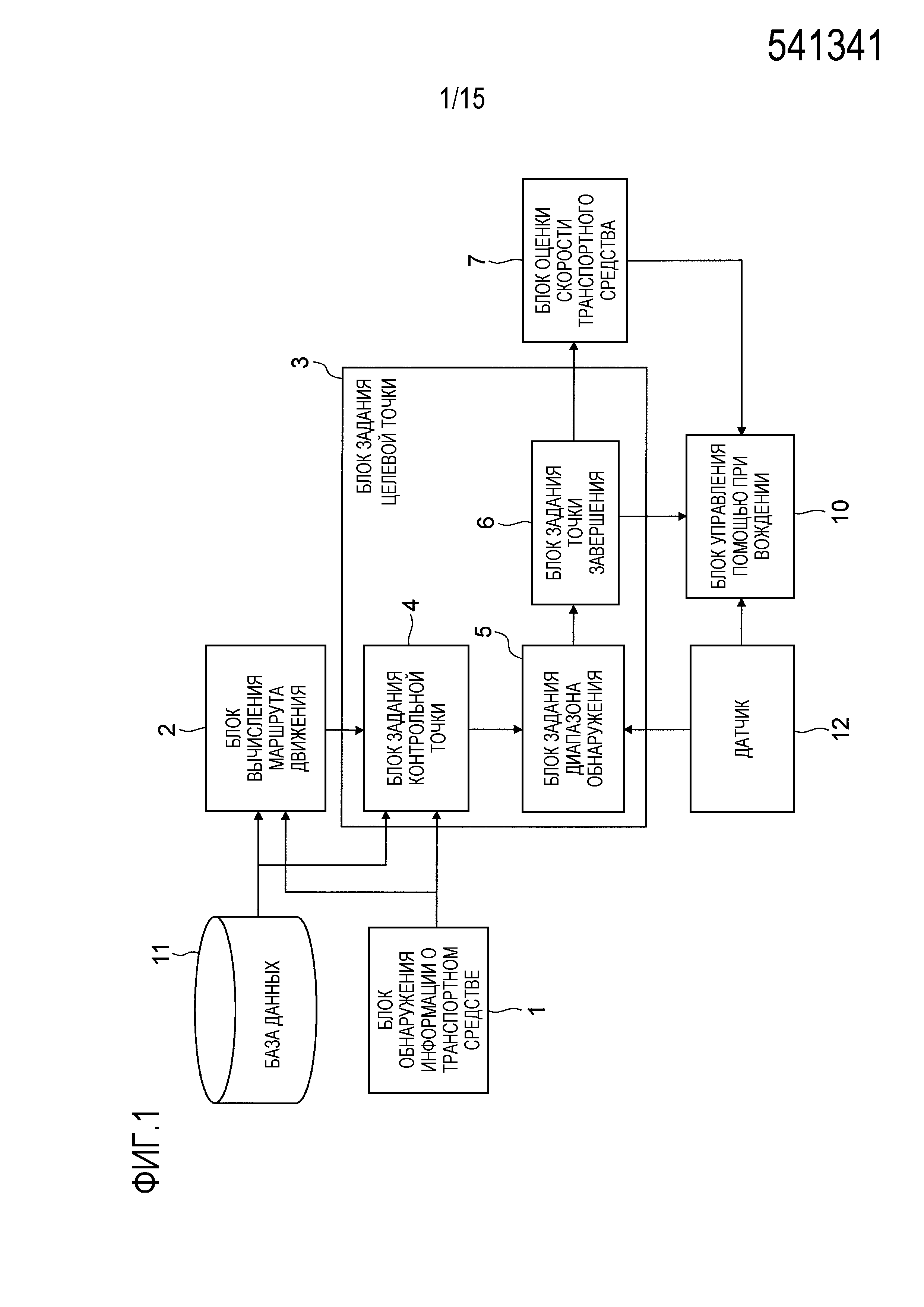
[0010] Фиг. 1 - это блок-схема устройства помощи при вождении согласно варианту осуществления настоящего изобретения. Устройство помощи при вождении согласно настоящему варианту осуществления является устройством, которым оборудуется транспортное средство для помощи при вождении при изменении полос движения.
[0011] Устройство помощи при вождении содержит постоянное запоминающее устройство (ROM), которое хранит различные программы, центральный процессор (CPU) в качестве схемы управления, которая выполняет программы, сохраненные в ROM, и оперативное запоминающее устройство (RAM), которое функционирует в качестве запоминающего устройства с возможностью осуществления доступа.
[0012] Устройство помощи при вождении содержит блок 10 управления помощью при вождении, базу 11 данных и датчик 12. База 11 данных хранит картографические данные. Картографические данные являются картографической информацией, такой как данные линий и данные узлов. Картографические данные включают в себя информацию о полосах движения и информацию, которая ограничивает движение транспортного средства. Информация о полосах движения может быть, например, информацией о полосе движения, такой как полоса движения на правый поворот, полоса для движения прямо и полоса движения на левый поворот, среди множества полос дороги, которая соединяется с перекрестком. В дополнение или альтернативно, информация о полосах движения может быть, например, информацией о главной дороге и переходно-скоростной полосе ускорения, которая становится частью главной дороги. В дополнение или альтернативно, информация о полосах движения может быть, например, информацией о главной дороге и ответвляющейся полосе, которая ответвляется от главной дороги. Картографическая база данных также хранит информацию о зонах, в которых изменения полос движения запрещаются, и информацию о линиях, которые указывают запрет изменений полос движения, в качестве информации для ограничения изменений полос движения при движении по вышеупомянутым полосам.
[0013] Датчик 12 - это датчик для обнаружения окружающих условий рассматриваемого транспортного средства. Примеры датчика 12 включают в себя камеры, устройства миллиметрового диапазона и радары. Датчик 12 предусматривается в рассматриваемом транспортном средстве.
[0014] Блок 10 управления помощью при вождении управляет движением рассматриваемого транспортного средства на основе обнаруженного значения датчика 12. Блок 10 управления помощью при вождении распознает ситуации впереди рассматриваемого транспортного средства, например, с помощью датчика 12 и управляет рассматриваемым транспортным средством, чтобы замедлять, когда расстояние между рассматриваемым транспортным средством и транспортным средством впереди рассматриваемого транспортного средства короче предварительно определенного расстояния. Блок 10 управления помощью при вождении также управляет рассматриваемым транспортным средством, чтобы останавливаться, не достигнув транспортного средства, расположенного впереди, для того, чтобы избегать столкновения с ним. Блок 10 управления помощью при вождении может не только выполнять управление для замедления, но также автономно управлять движением, таким как изменение полосы движения и правый и левый поворот.
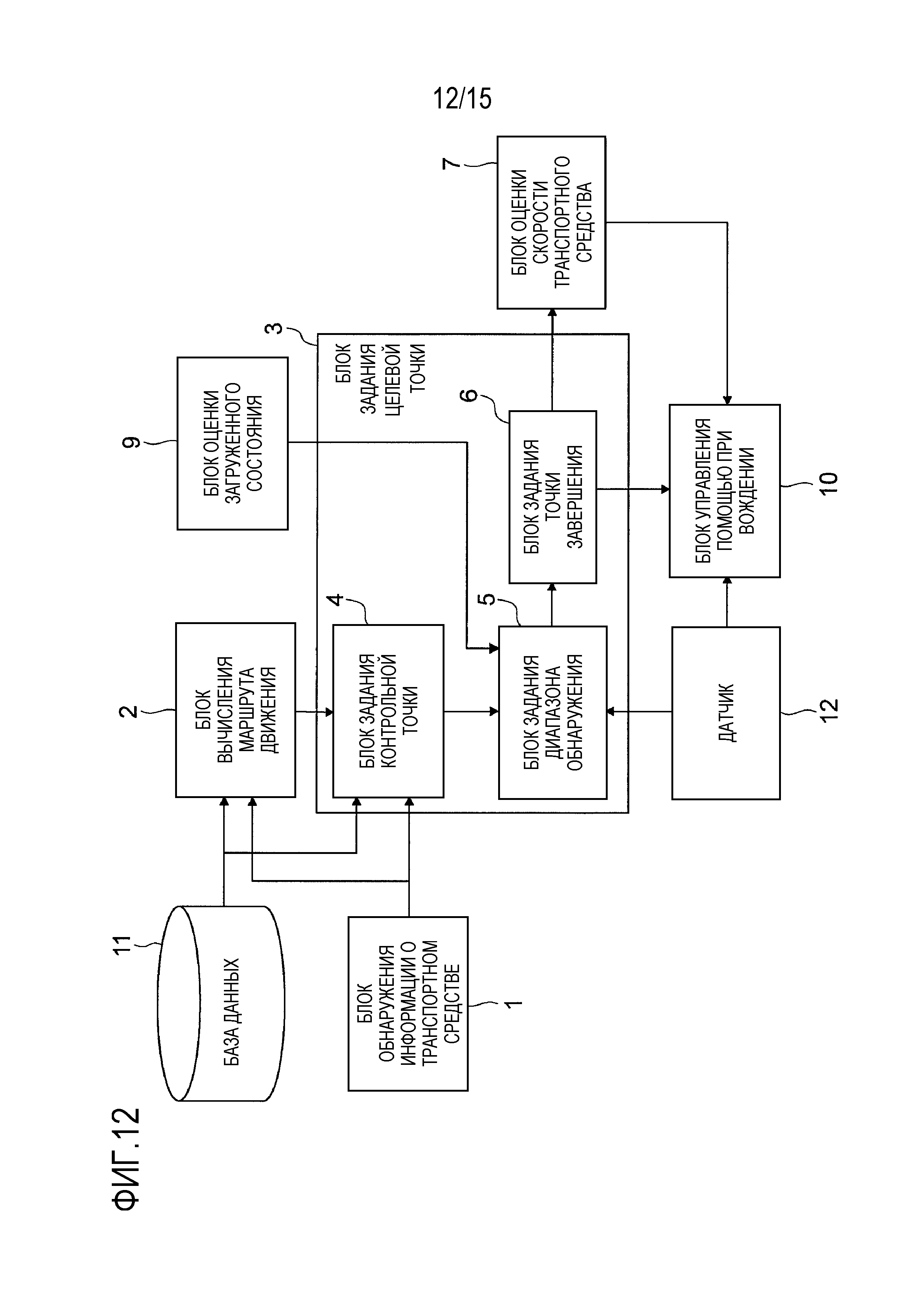
[0015] Устройство помощи при вождении имеет блок 1 обнаружения информации о транспортном средстве, блок 2 вычисления маршрута движения, блок 3 задания целевой точки и блок 7 оценки скорости транспортного средства в качестве функциональных блоков для задания характера изменения полос движения, подходящего для вышеописанной помощи при вождении. Блок 3 задания целевой точки имеет блок 4 задания контрольной точки, блок 5 задания диапазона обнаружения и блок 6 задания точки завершения.
[0016] Блок 1 обнаружения информации о транспортном средстве обнаруживает информацию о транспортном средстве для рассматриваемого транспортного средства. Информация о транспортном средстве включает в себя позиционную информацию для рассматриваемого транспортного средства и другие элементы данных. Блок 1 обнаружения информации о транспортном средстве имеет функцию, которая должна быть использована с GPS или т.п., и измеряет текущую позицию транспортного средства.
[0017] Блок 2 вычисления маршрута движения получает информацию о транспортном средстве от блока 1 обнаружения информации о транспортном средстве и вычисляет маршрут движения от текущей позиции транспортного средства до пункта назначения, в то же время обращаясь к картографическим данным.
[0018] Блок 3 задания целевой точки задает местоположение, в котором рассматриваемое транспортное средство меняет полосы движения, на маршруте движения. Блок 3 задания целевой точки также задает целевую точку для изменения полос движения, когда рассматриваемое транспортное средство меняет полосы движения, так что рассматриваемое транспортное средство может обнаруживать окружающую обстановку с помощью датчика 12 после смены полосы движения.
[0019] После получения маршрута движения от блока 2 вычисления маршрута движения блок 4 задания контрольной точки обращается к картографическим данным в базе 11 данных, чтобы задавать местоположение, в котором рассматриваемое транспортное средство должно менять полосы движения (называемое также "местоположением изменения полос движения" далее в данном документе) на маршруте движения от текущей позиции рассматриваемого транспортного средства до пункта назначения. Например, местоположение изменения полос движения задается, как, например, при движении по дороге из двух полос и повороте направо на перекрестке, расположенном впереди, или при въезде на главную дорогу в точке слияния автомагистрали. В дополнение или альтернативно, местоположение изменения полос движения может быть местоположением, в котором движение рассматриваемого транспортного средства ограничено вследствие формы дороги, когда рассматриваемое транспортное средство движется по маршруту движения. Блок 4 задания контрольной точки задает местоположение изменения полос движения со ссылкой на информацию о дороге, включенную в картографические данные.
[0020] Блок 4 задания контрольной точки задает, на маршруте движения, контрольную точку, которая должна быть ориентиром при задании точки завершения изменения полос движения, которая будет описана позже. Контрольная точка находится впереди местоположения изменения полос движения в направлении движения рассматриваемого транспортного средства. Подробности контрольной точки будут описаны позже. Блок 4 задания контрольной точки задает местоположение изменения полос движения и контрольную точку на маршруте движения на основе позиции рассматриваемого транспортного средства и картографической информации.
[0021] Блок 5 задания диапазона обнаружения задает диапазон обнаружения датчика 12.
[0022] Блок 6 задания точки завершения задает точку, в которой рассматриваемое транспортное средство должно завершать изменение полос движения (называемую также "точкой завершения изменения полос движения" далее в данном документе) на основе диапазона обнаружения датчика 12 и контрольной точки, которая задается посредством блока 4 задания контрольной точки.
[0023] Блок 3 задания целевой точки выводит местоположение изменения полос движения, контрольную точку и точку завершения изменения полос движения в блок 7 оценки скорости транспортного средства и блок 10 управления помощью движению, в качестве различных целевых точек.
[0024] Блок 7 оценки скорости транспортного средства оценивает скорость транспортного средства, с которой рассматриваемое транспортное средство должно двигаться в точке завершения изменения полос движения, на основе расстояния от точки завершения изменения полос движения до контрольной точки и замедления от точки завершения изменения полос движения до контрольной точки.
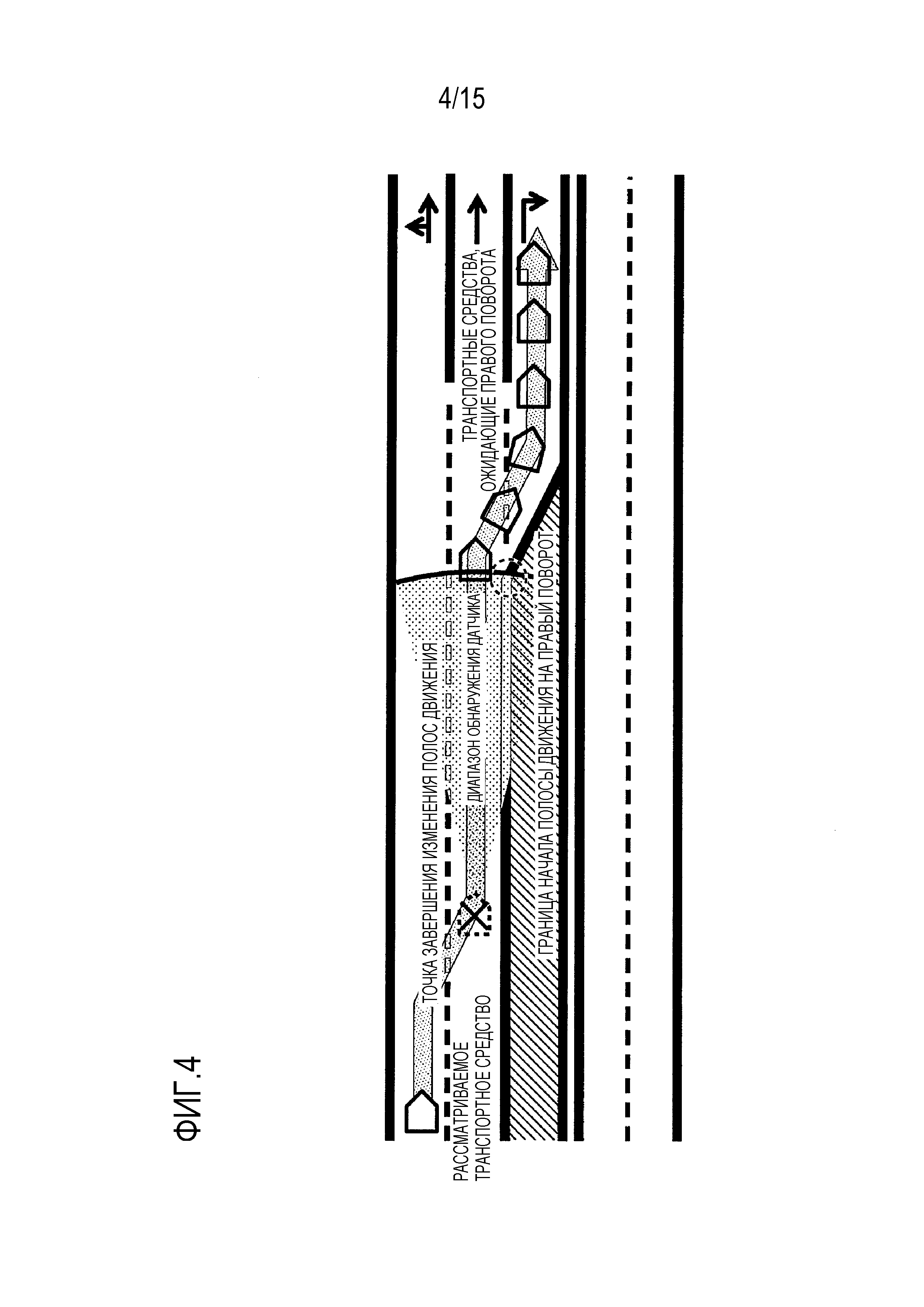
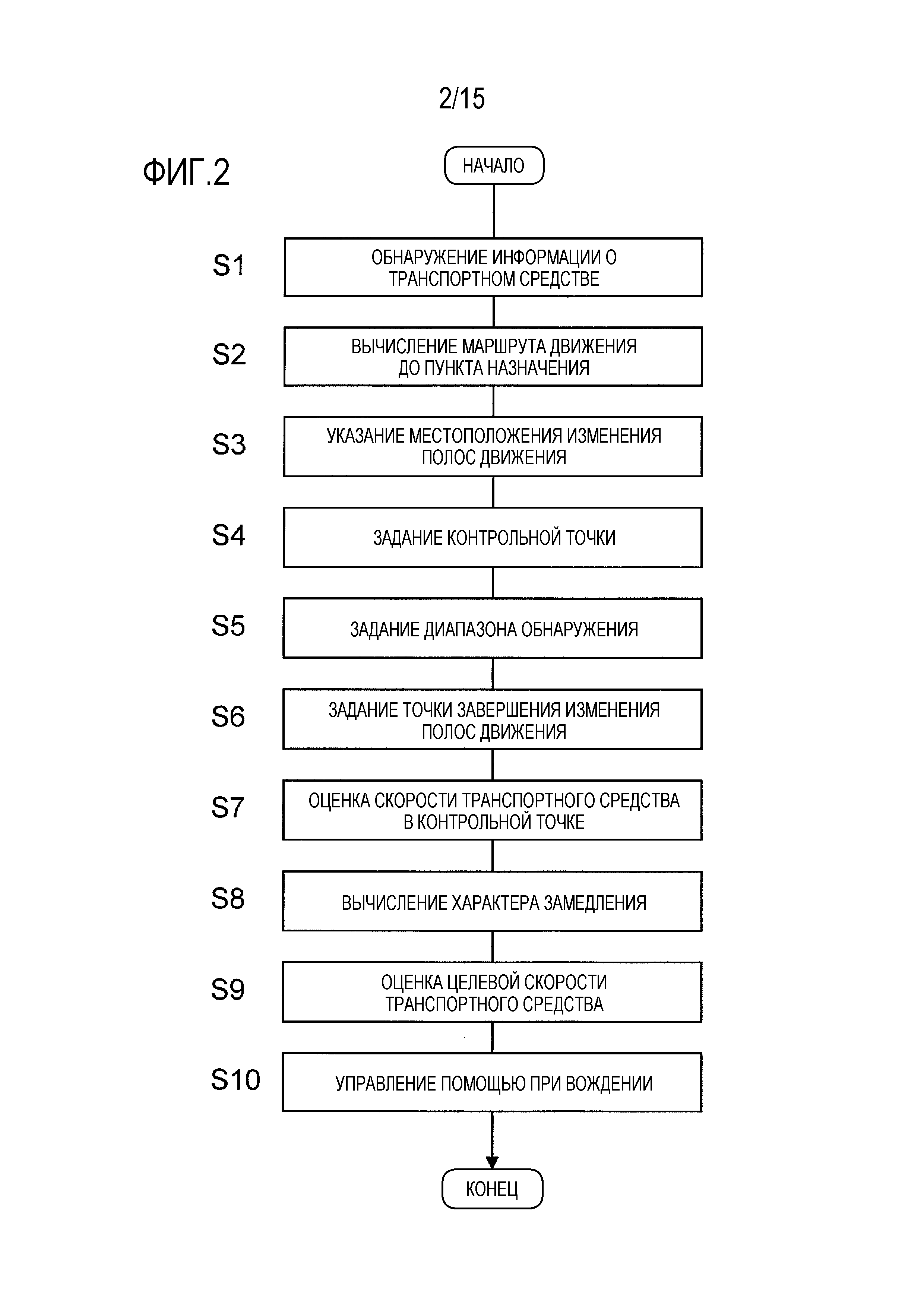
[0025] Управление посредством устройства помощи при вождении будет затем описано, в то же время ссылаясь на конкретный пример. Фиг 2 - это блок-схема последовательности операций, иллюстрирующая алгоритм управления устройства помощи при вождении. Иллюстрируется конкретный пример, в котором рассматриваемое транспортное средство движется по трехполосной дороге и поворачивает направо на перекрестке, расположенном впереди. Фиг. 3 - это вид, иллюстрирующий планировку дороги в качестве конкретного примера. Как иллюстрировано на фиг. 3, рассматриваемое транспортное средство движется по полосе A в моменте и должно изменять полосы с полосы A на полосу (переходно-скоростную полосу) B и далее с полосы B на полосу C для поворота направо на перекрестке, расположенном впереди. Часть полосы C является зоной, в которой изменения полос движения запрещены.
[0026] Сначала, на этапе S1, блок 1 обнаружения информации о транспортном средстве обнаруживает позицию рассматриваемого транспортного средства в качестве текущей информации о транспортном средстве для рассматриваемого транспортного средства. Позиция транспортного средства обнаруживается посредством сочетания системы глобального позиционирования (GPS), гиродатчика, датчика скорости транспортного средства и т.п. Позиция транспортного средства не должна ограничиваться текущей позицией стоящего транспортного средства и может также быть текущей позицией движущегося транспортного средства.
[0027] На этапе S2 блок 2 вычисления маршрута движения вычисляет маршрут движения до пункта назначения на основе текущей позиции транспортного средства. Маршрут движения является маршрутом, по которому рассматриваемое транспортное средство должно двигаться далее. Маршрут движения может быть вычислен с помощью автомобильной навигационной системы. Вычисление маршрута движения может необязательно получать полосу движения, по которой транспортное средство должно двигаться, и достаточно определять, должно ли транспортное средство ехать прямо вперед по маршруту или ехать прямо, поворачивать направо или поворачивать налево на перекрестке.
[0028] На этапе S3 блок 4 задания контрольной точки указывает перекресток на маршруте движения на основе текущей позиции транспортного средства и картографической информации. Блок 4 задания контрольной точки затем задает местоположение изменения полос движения на основе указанного перекрестка и маршрута движения. В примере на фиг. 3 блок 4 задания контрольной точки обращается к картографической информации, чтобы указывать, что дорога, соединяющаяся с перекрестком, имеет три полосы движения, и может указывать, что рассматриваемое транспортное средство поворачивает направо с маршрута движения на перекрестке. Соответственно, блок 4 задания контрольной точки может указывать, что рассматриваемому транспортному средству нужно изменять полосы движения перед перекрестком для того, чтобы двигаться через перекресток. Блок 4 задания контрольной точки может также указывать местоположение, в котором изменение полосы движения необходимо, из планировки дороги, соединяющейся с перекрестком. Таким образом, блок 4 задания контрольной точки указывает местоположение, в котором изменение полосы движения необходимо, на основе структуры дороги, представленной посредством картографической информации, и блок 4 задания контрольной точки задает местоположение в качестве местоположения изменения полос движения.
[0029] Когда маршрут движения включает в себя множество перекрестков, блок 4 задания контрольной точки указывает каждый перекресток и указывает местоположение изменения полос движения на основе дорожной информации для дороги, соединяющейся с перекрестком, и маршрута движения. Это предоставляет возможность блоку 4 задания контрольной точки указывать все перекрестки на маршруте движения и местоположения изменения полос движения.
[0030] На этапе S4 блок 4 задания контрольной точки задает контрольную точку на основе картографических данных. Контрольная точка представляет позицию признака, который влияет на движение рассматриваемого транспортного средства когда выполняется помощь движению рассматриваемого транспортного средства. В примере на фиг. 3 движение рассматриваемого транспортного средства ограничивается запретной зоной 101 для изменения полос движения и линией 102, которая указывает запрет изменений полос движения, в маршруте движения (представленном стрелкой S на фиг. 3) рассматриваемого транспортного средства.
[0031] Запретная зона 101 для изменения полос движения окрашена множеством наклонных линий. Полоса движения на правый поворот является полосой короткой протяженности перед перекрестком и располагается с правой стороны относительно переходно-скоростной полосы. При въезде на полосу движения на правый поворот транспортное средство должно изменять полосы движения с переходно-скоростной полосы на полосу движения на правый поворот. Чтобы ограничивать это изменение полосы движения окрашивается запретная зона 101 для изменения полос движения.
[0032] Линия 102 окрашена как сплошная оранжевая линия. Изменения полос движения запрещаются в диапазоне 30 метров перед перекрестком, а линия 102 представляет запрет изменений полос движения.
[0033] Блок 4 задания контрольной точки указывает конец запретной зоны 101 для изменения полос движения в качестве контрольной точки в направлении движения рассматриваемого транспортного средства. Эта контрольная точка представляет часть границы начала, в которой начинается полоса движения на правый поворот, когда рассматриваемое транспортное средство движется по маршруту движения (эта контрольная точка будет также называться "границей начала полосы движения на правый поворот" далее в данном документе). В дополнение или альтернативно, блок 4 задания контрольной точки задает край начала линии 102 в качестве контрольной точки в направлении движения рассматриваемого транспортного средства. Эта контрольная точка представляет начало крайней части зоны, в которой изменения полос движения запрещаются, когда рассматриваемое транспортное средство движется по полосе движения на правый поворот (эта контрольная точка будет также называться "концом запрета изменения полос движения" далее в данном документе).
[0034] Когда существует множество указанных контрольных точек, блок 4 задания контрольной точки задает контрольную точку, находящуюся наиболее близко к рассматриваемому транспортному средству, в качестве контрольной точки объекта управления.
[0035] При помощи при вождении по маршруту движения блок 10 помощи при вождении обнаруживает запретную зону 101 для изменения полос движения с помощью датчика 12 после изменения полос движения с полосы движения на переходно-скоростную полосу. Затем блок 10 управления помощью при вождении обнаруживает линию 102 с помощью датчика 12 после изменения полос движения с переходно-скоростной полосы на полосу движения на правый поворот. Т.е., контрольная точка, заданная посредством блока 4 задания контрольной точки, соответствует позиции, которая должна быть обнаружена посредством датчика 12 для движения после изменения полос движения. На фиг. 3 диапазон обнаружения датчика 12 (например, широкий угол обзора камеры) задается так, что датчик 12 может обнаруживать контрольную точку (границу начала полосы движения на правый поворот).
[0036] На этапе S5 блок 5 задания диапазона обнаружения задает диапазон обнаружения датчика 12. Например, датчик 12 предполагает быть множеством датчиков, включающих в себя не только камеру, но также любое из устройства миллиметрового диапазона, радара и лазера, которые предусматриваются в рассматриваемом транспортном средстве, чтобы дополнять каждый диапазон обнаружения датчиков. Здесь, диапазон обнаружения (расстояние обнаружения) датчика в качестве типичного значения (номинального значения) функциональной характеристики датчика может быть 200 метров в случае устройства миллиметрового диапазона, сотни метров в случае радара, 100 метров в случае лазера и десятки метров в случае камеры.
[0037] Диапазон обнаружения датчика может быть определен не только посредством расстояния, но посредством угла. Диапазон обнаружения устройства миллиметрового диапазона является относительно узким углом, но диапазон обнаружения камеры может быть выбран, чтобы быть узким или широким, вследствие широкого угла линз.
[0038] Когда множество датчиков размещается так, что они покрывают одинаковый диапазон, чтобы избегать ошибочного распознавания, максимальный диапазон обнаружения посредством датчиков может быть использован в качестве диапазона обнаружения датчиков, или минимальный диапазон обнаружения может быть использован в качестве диапазона обнаружения датчиков.
[0039] Описание ниже будет выполнено при допущении, что диапазон формирования изображения камеры является диапазоном обнаружения (например, 50 метров), в описательных целях.
[0040] На этапе S6 блок 6 задания точки завершения задает точку завершения изменения полос движения в позицию, отделенную от контрольной точки (граница начала полосы движения на правый поворот) протяженностью диапазона обнаружения в направлении, противоположном направлению движения рассматриваемого транспортного средства. Протяженность диапазона обнаружения является длиной линии диапазона обнаружения в направлении движения транспортного средства.
[0041] Со ссылкой на фиг. 4 и фиг. 5 будет описано позиционное соотношение между контрольной точкой (граница начала полосы движения на правый поворот), диапазоном обнаружения и точкой завершения изменения полос движения. Фиг. 4 и фиг. 5 являются видами, каждый из которых иллюстрирует планировку дороги, и эта планировка является такой же, что и планировка на фиг. 3.
[0042] Как иллюстрировано на фиг. 4, точка завершения изменения полос движения задается в позиции, которая приближается к рассматриваемому транспортному средству от контрольной точки (граница начала полосы движения на правый поворот) на расстояние диапазона обнаружения. Когда рассматриваемое транспортное средство движется по маршруту движения с дороги перед перекрестком по направлению к перекрестку, точка завершения изменения полос движения задается в позиции, в которой, после того как рассматриваемое транспортное средство изменяет полосы движения с полосы движения на переходно-скоростную полосу, блок 10 управления помощью движению может обнаруживать контрольную точку (граница начала полосы движения на правый поворот) с помощью датчика 12.
[0043] Если точка завершения изменения полос движения задается в позиции ближе к рассматриваемому транспортному средству, чем позиция, иллюстрированная на фиг. 4, контрольная точка (граница начала полосы движения на правый поворот) не будет включена в диапазон обнаружения, непосредственно после того как рассматриваемое транспортное средство изменяет полосы с полосы движения на переходно-скоростную полосу. Предположим, что точка, в которой транспортное средство, движущееся по переходно-скоростной полосе, начинает обнаруживать контрольную точку (граница начала полосы движения на правый поворот), является точкой начала обнаружения, если расстояние между точкой завершения изменения полос движения и точкой начала обнаружения является длинным, рассматриваемое транспортное средство будет двигаться по переходно-скоростной полосе в течение длительного времени после изменения полос. Такое движение может не быть предпочтительным.
[0044] С другой стороны, если, гипотетически, точка завершения изменения полос задается в позиции, более отдаленной от рассматриваемого транспортного средства, чем позиция, иллюстрированная на фиг. 4, момент обнаружения контрольной точки (граница начала полосы движения на правый поворот) посредством датчика 12 будет отложен до момента после того, как рассматриваемое транспортное средство изменяет полосы с полосы движения на переходно-скоростную полосу. Например, когда, как иллюстрировано на фиг. 5, транспортные средства, ожидающие правого поворота на перекрестке, сходят с полосы движения на правый поворот, помощь при вождении не выполняется, пока рассматриваемое транспортное средство не достигнет точки завершения изменения полос движения. Затем, если рассматриваемое транспортное средство завершает изменение полос движения в точке изменения полос движения в соответствии с помощью при вождении, рассматриваемому транспортному средству потребуется быстрое замедление, поскольку межтранспортное расстояние от рассматриваемого транспортного средства до транспортного средства, находящегося впереди, является коротким.
[0045] В настоящем варианте осуществления позиция точки завершения изменения полос движения задается так, чтобы совпадать с моментом обнаружения контрольной точки (границы начала полосы движения на правый поворот) посредством датчика 12, после того как рассматриваемое транспортное средство изменяет полосы с полосы движения на переходно-скоростную полосу. Таким образом, после завершения изменения полос, дорожная обстановка около контрольной точки (граница начала полосы движения на правый поворот) может быть расценена посредством использования полностью диапазона обнаружения датчика. Кроме того, ситуация на полосе движения на правый поворот (например, ситуация, как иллюстрировано на фиг. 5, в которой транспортные средства, ожидающие правого поворота, сходят с полосы движения на правый поворот) может быть мгновенно подтверждена, и рассматриваемое транспортное средство может гибко реагировать на такие транспортные средства, находящиеся впереди.
[0046] На этапе S7 блок 7 оценки скорости транспортного средства оценивает скорость транспортного средства в контрольной точке (граница начала полосы движения на правый поворот) на основе картографической информации. В примере на фиг. 4 рассматриваемое транспортное средство въезжает на полосу движения на правый поворот из контрольной точки (граница начала полосы движения на правый поворот), и, следовательно, скорость транспортного средства в контрольной точке (граница начала полосы движения на правый поворот) будет более низкой скоростью, чем допустимая скорость, вследствие структуры дороги поблизости от контрольной точки (граница начала полосы движения на правый поворот). Кроме того, после въезда на полосу движения на правый поворот из контрольной точки (граница начала полосы движения на правый поворот), рассматриваемое транспортное средство будет замедляться при подготовке для правого поворота на перекрестке.
[0047] Поскольку могут быть случаи, когда сигнал светофора на перекрестке переключился на красный, и когда другие транспортные средства стоят в очереди при подготовке для правого поворота на перекрестке, скорость транспортного средства в контрольной точке (граница начала полосы движения на правый поворот) будет дополнительно уменьшена. Например, предположим, что другие транспортные средства заполняют полосу движения на правый поворот, и рассматриваемое транспортное средство принудительно останавливается перед въездом на полосу движения на правый поворот, блок 7 оценки скорости транспортного средства оценивает скорость транспортного средства в контрольной точке (граница начала полосы движения на правый поворот) как нулевую [км/ч]. С другой стороны, предположим, что другие транспортные средства не заполняют полосу движения на правый поворот, и рассматриваемое транспортное средство может плавно въезжать на полосу движения на правый поворот, блок 7 оценки скорости транспортного средства оценивает скорость транспортного средства как равную 20-30 [км/ч] для дороги с допустимой скоростью 60 [км/ч]. Таким образом, блок 7 оценки скорости транспортного средства оценивает скорость транспортного средства, принимая во внимание обстановку дорожного движения около контрольной точки (граница начала полосы движения на правый поворот). Описание ниже будет выполнено при допущении, что скорость транспортного средства в контрольной точке (граница начала полосы движения на правый поворот) оценивается равной нулю [км/ч].
[0048] На этапе S8 блок 7 оценки скорости транспортного средства вычисляет характер замедления от точки завершения изменения полос до контрольной точки (граница начала полосы движения на правый поворот) на основе оцененной скорости транспортного средства. Характер замедления представляется замедлением скорости транспортного средства. Например, когда замедление достаточно умеренное, замедление может быть 0,15 G. Характер замедления может быть характером приблизительно фиксированного замедления, или замедление может также изменяться в соответствии со скоростью.
[0049] На этапе S9 блок 7 оценки скорости транспортного средства оценивает скорость транспортного средства, с которой рассматриваемое транспортное средство должно двигаться в точке завершения изменения полос (называемую "целевой скоростью транспортного средства" далее в данном документе), на основе скорости транспортного средства в контрольной точке (граница начала полосы движения на правый поворот) и характера замедления. Целевая скорость транспортного средства является целевым значением скорости рассматриваемого транспортного средства, которое должно быть достигнуто, когда изменение полосы завершено.
[0050] В примере на фиг. 4 предположим, что v[км/ч] представляет целевую скорость транспортного средства, а t представляет время, требуемое, чтобы рассматриваемое транспортное средство замедлилось с помощью фиксированного замедления (0,15 G) от точки завершения изменения полос до контрольной точки (граница начала полосы движения на правый поворот).
[0051] Протяженность (d[м]) диапазона обнаружения датчика 12 представляется посредством уравнения (1).
[0052] [Выражение 1]

[0053] Кроме того, соотношение между скоростью (v) и временем (t) в точке завершения изменения полос представляется посредством уравнения (2).
[0054] [Выражение 2]

[0055] Скорость (v), следовательно, представляется посредством уравнения (3) из уравнения (1) и (2).
[0056] [Выражение 3]

[0057] Когда камера используется в качестве датчика 12, диапазон обнаружения может быть десятками метров. В качестве одного примера, целевой скоростью транспортного средства является v=43,65 [км/ч], когда d=50 [м] из уравнения (3).
[0058] Т.е., когда рассматриваемое транспортное средство замедляется до целевой скорости транспортного средства, равной 43,65 [км/ч] в точке завершения изменения полос (позиции перед началом конца полосы движения на правый поворот за 50 метров), рассматриваемое транспортное средство может останавливаться в контрольной точке (граница начала полосы движения на правый поворот) во время замедления с 0,15 G. Когда скорость транспортного средства, вычисленная с помощью вышеприведенных уравнений, выше допустимой скорости, блок 7 оценки скорости транспортного средства может вычислять допустимую скорость в качестве целевой скорости транспортного средства.
[0059] На этапе S10 блок 10 управления помощью при вождении выполняет управление помощью при вождении, так что рассматриваемое транспортное средство завершает изменение полос движения в точке завершения изменения полос, и скорость транспортного средства, когда изменение полосы завершается, становится целевой скоростью транспортного средства. В случае автономного вождения, например, блок управления помощью при вождении во время изменения полос выполняет ускорение, рулевое управление, торможение и другие необходимые операции для рассматриваемого транспортного средства, так что скорость транспортного средства в точке завершения изменения полос становится целевой скоростью транспортного средства, и рассматриваемое транспортное средство завершает изменение полос движения в точке завершения изменения полос.
[0060] Таким образом, в настоящем варианте осуществления, когда местоположение, в котором изменение полосы должно быть выполнено, задается на маршруте движения в место назначения, точка завершения изменения полос задается на основе диапазона обнаружения датчика. Когда помощь при вождении выполняется с тем, чтобы завершать изменение полос в точке завершения изменения полос, следовательно, датчик 12 может легко обнаруживать изменение окружающей обстановки около контрольной точке на изменившейся полосе. Следовательно, соответствующие изменения полос могут быть реализованы, в то же время предотвращая быстрые изменения полос или быстрое замедление после завершения изменения полос.
[0061] Как упомянуто выше, в настоящем варианте осуществления, местоположение изменения полос движения и контрольная точка задаются на маршруте движения на основе позиции рассматриваемого транспортного средства и картографической информации, а точка завершения изменения полос задается на основе диапазона обнаружения датчика 12 и позиции контрольной точки. Посредством этой операции, когда изменение полосы выполняется в точке завершения изменения полос, датчик 12 легко обнаруживает изменение окружающей обстановки на маршруте движения до контрольной точки. Изменение полосы движения может, следовательно, выполняться в надлежащем местоположении.
[0062] В настоящем варианте осуществления позиция, которая должна быть обнаружена посредством датчика 12, задается в качестве контрольной точки для движения после изменения полос в точке завершения изменения полос. Посредством этой операции, когда изменение полосы выполняется в точке завершения изменения полос, датчик 12 может легко обнаруживать изменение окружающей обстановки около контрольной точки. Изменение полосы движения может, следовательно, выполняться в надлежащем местоположении.
[0063] В настоящем варианте осуществления точка завершения изменения полос задается в позиции, отделенной от контрольной точки протяженностью диапазона обнаружения в направлении, противоположном направлению движения рассматриваемого транспортного средства. Посредством этой настройки, когда изменение полосы завершается в точке завершения изменения полос, по меньшей мере, расстояние, соответствующее диапазону обнаружения датчика 12, может быть обеспечено между рассматриваемым транспортным средством и контрольной точкой. Дорожная обстановка около контрольной точки может, следовательно, восприниматься посредством использования полностью диапазона обнаружения датчика.
[0064] В настоящем варианте осуществления скорость транспортного средства, с которой рассматриваемое транспортное средство должно двигаться в точке завершения изменения полос, оценивается на основе расстояния от точки завершения изменения полос до контрольной точки и замедления от точки завершения изменения полос до контрольной точки. Посредством этой оценки помощь при вождении может управляться с помощью оцененной скорости транспортного средства, которая задается в качестве целевой скорости транспортного средства, чтобы, тем самым, препятствовать быстрому замедлению после изменения полос.
[0065] В настоящем варианте осуществления местоположение изменения полос, требуемого для движения через перекресток, задается в качестве местоположения изменения полос. Это предоставляет возможность помощи при вождении выполнять надлежащее изменение полосы, когда изменение полосы необходимо для движения через перекресток.
[0066] В настоящем варианте осуществления контрольная точка задается на основе структуры дороги, представленной посредством картографической информации. Это предоставляет возможность задавать контрольную точку на основе универсальных признаков дорожной структуры, такой как формы полос движения и дороги. Типичные изменения полос могут, следовательно, быть выполнены на маршруте, на котором изменение полос запланировано.
[0067] В настоящем варианте осуществления контрольная точка может быть начальной границей (соответствующей границе начала полосы движения на правый поворот) при изменении полос после завершения изменения полос в точке завершения изменения полос. В этом случае изменения полос могут быть реализованы так, чтобы предоставлять возможность плавного движения, в то же время соблюдая правила дорожного движения.
[0068] В настоящем варианте осуществления диапазон обнаружения датчика 12 задается в соответствии с типичным значением датчика 12. Это предоставляет возможность выполнения надлежащих изменений полос движения, в то же время воспринимая погрешность датчика 12 и тенденцию диапазона обнаружения датчика 12.
[0069] В настоящем варианте осуществления контрольная точка является границей начала полосы движения на правый поворот, но контрольная точка может быть концом запрета изменения полос. Фиг. 6, которая иллюстрирует планировку дороги, является видом для описания управления, когда конец запрета изменения полос является контрольной точкой. Запретная зона 101 для изменения полос не существует в планировке на фиг. 6, по сравнению с планировкой на фиг. 4. Другие являются такими же, что и зоны в планировке на фиг. 4. В планировке на фиг. 6 то же управление, что и вышеописанное, выполняется, в то время как конец запрета изменения полос задается в качестве контрольной точки, при изменении полос с полосы B на полосу C.
[0070] Настоящий вариант осуществления описывается со ссылкой на пример движения через перекресток после изменения полос движения, но перекресток может быть заменен, например, точкой слияния или точкой разветвления.
[0071] Устройство помощи при вождении может вычислять маршрут движения, не только когда транспортное средство движется, но также когда транспортное средство останавливается.
[0072] Настоящий вариант осуществления описывается со ссылкой на примерный случай трехполосной дороги, содержащей полосу движения, переходно-скоростную полосу и полосу исключительно для правого поворота, но настоящий вариант осуществления не ограничивается этим и может также быть применен к двухполосной дороге, содержащей полосу движения и переходно-скоростную полосу. Например, в случае, в котором рассматриваемое транспортное средство движется по полосе движения и должно менять полосы на переходно-скоростную полосу перед достижением перекрестка (например, когда рассматриваемое транспортное средство должно поворачивать направо непосредственно после проезда через перекресток), стоп-линия перекрестка задается в качестве контрольной точки, и задается точка завершения изменения полос с полосы движения на переходно-скоростную полосу. Точка завершения изменения полос задается в точку, отделенную от стоп-линии протяженностью диапазона обнаружения датчика 12 в направлении, противоположном направлению движения рассматриваемого транспортного средства. В таком примере, когда другое транспортное средство, ожидающее сигнала светофора, существует на переходно-скоростной полосе, ожидающее транспортное средство может быть мгновенно подтверждено, и те же результаты, что и выше, могут, таким образом, быть получены.
[0073] Вышеописанный блок 1 обнаружения информации о транспортном средстве соответствует "блоку измерения позиции" настоящего изобретения, датчик 12 соответствует "блоку обнаружения" настоящего изобретения, блок 3 задания целевой точки соответствует "блоку настройки" настоящего изобретения, и блок 7 оценки скорости транспортного средства соответствует "блоку оценки скорости транспортного средства" настоящего изобретения.
[0074] Второй вариант осуществления
Фиг. 7 - это блок-схема устройства помощи при вождении согласно другому варианту осуществления настоящего изобретения. По сравнению с вышеописанным первым вариантом осуществления этот вариант осуществления отличается в том, что устройство помощи при вождении содержит блок 8 вычисления расстояния движения. Другие признаки являются идентичными признакам в вышеописанном первом варианте осуществления, и описание заимствуется в данном документе.
[0075] Блок 3 задания целевой точки имеет блок 8 вычисления расстояния движения в дополнение к блоку 4 задания контрольной точки и т.п. Блок 8 вычисления расстояния движения вычисляет расстояние движения рассматриваемого транспортного средства, которое движется к контрольной точке после изменения полос, на основе скорости транспортного средства рассматриваемого транспортного средства после изменения полос движения и замедления от точки изменения полос до контрольной точки. Блок 8 вычисления расстояния движения выводит результат вычисления в блок 6 задания точки завершения.
[0076] Затем будет описано управление устройства помощи при вождении. Фиг 8 - это блок-схема последовательности операций, иллюстрирующая алгоритм управления устройства помощи при вождении.
[0077] Алгоритм управления этапов S11-S14 является таким же, что и алгоритм управления этапов S1-S4 первого варианта осуществления.
[0078] На этапе S15 блок 5 задания диапазона обнаружения получает погрешность диапазона обнаружения датчика 12. Датчик 12 включает в себя множество датчиков, таких как устройство миллиметрового диапазона, радар, лазер и камера, которые имеют различные характеристики. Лазер может реализовывать очень высокую точность в измерении расстояния и обнаружении (например, погрешность 1% в расстоянии) благодаря используемому сигналу и способу измерения. С другой стороны, камеры сами не имеют функциональной характеристики измерения расстояния и обнаружения и, следовательно, способны измерять расстояние посредством движения стереопары, например, с помощью результатов распознавания временного ряда одной камеры. Однако, функциональная характеристика обнаружения и функциональная характеристика измерения расстояния камер являются низкими по сравнению с лазером. Другими словами, погрешность, включенная в результат обнаружения датчика 12, может быть определена посредством уникальных значений устройств датчиков и способов распознавания с помощью датчика. Таким образом, функциональная характеристика различается в соответствии с различными датчиками, которые составляют датчик 12. Блок 5 задания диапазона обнаружения воспринимает погрешность обнаружения датчика 12 на основе функциональной характеристики и т.п. каждого датчика.
[0079] На этапе S16 блок 5 задания диапазона обнаружения вычисляет коэффициент достоверности диапазона обнаружения датчика 12. Не только погрешность, но также коэффициент достоверности является различным в различных датчиках, таких как камера и радар, которые составляют датчик 12. Коэффициент достоверности является показателем, который представляет, может или нет результат обнаружения быть обеспечен в качестве правильного результата. Коэффициент достоверности, включенный в результат обнаружения датчика, принимает значение, которое изменяется в зависимости от ситуации. Например, блок 5 задания диапазона обнаружения может вычислять коэффициент достоверности на основе процесса движения целевого объекта, который должен быть обнаружен, поскольку такой процесс движения целевого объекта может быть воспринят посредством анализа данных временного ряда во время движения. Кроме того, блок 5 задания диапазона обнаружения воспринимает окружающие ситуации вокруг транспортного средства, которое в настоящее время движется, с помощью датчика 12. Окружающие ситуации, обнаруживаемые посредством датчика 12, не изменяются скоро. Например, когда предыдущий результат обнаружения датчика 12 указывает, что другое транспортное средство движется бок о бок с рассматриваемым транспортным средством, текущий результат обнаружения датчика 12 будет также указывать, что присутствие другого транспортного средства обнаруживается даже с отличающейся относительной позицией другого транспортного средства. Когда текущий результат обнаружения не указывает присутствие другого транспортного средства, коэффициент достоверности датчика 12 может быть низким. Блок 5 здания диапазона обнаружения сравнивает предыдущий результат обнаружения с текущим результатом обнаружения, чтобы определять непрерывность окружающих ситуаций, и может, тем самым, вычислять коэффициент достоверности.
[0080] На этапе S17 блок 5 задания диапазона обнаружения корректирует диапазон обнаружения датчика 12 на основе погрешности и коэффициента достоверности. Блок 5 задания диапазона обнаружения хранит карту, которая представляет соотношение соответствия между погрешностью, коэффициентом достоверности и корректирующим расстоянием. Фиг. 9 - это график, иллюстрирующий соотношение, представленное посредством карты. Карта показывает характеристики, в которых, когда погрешность увеличивается, корректирующее расстояние увеличивается, а когда коэффициент достоверности уменьшается, корректирующее расстояние уменьшается. Корректирующее расстояние является корректирующим значением, которое добавляется к протяженности диапазона обнаружения, чтобы корректировать диапазон обнаружения.
[0081] Когда погрешность очень мала, а коэффициент достоверности очень высокий, диапазон обнаружения датчика не должен корректироваться. Когда коэффициент достоверности является высоким, и погрешность является большой, обнаружение может быть выполнено, но обнаруженное значение включает в себя большую величину погрешности. Когда погрешность является маленькой и коэффициент достоверности является низким, погрешность является небольшой, но обнаружение не может быть выполнено. Таким образом, диапазон обнаружения корректируется с учетом низкого коэффициента достоверности и большой погрешности, так что диапазон обнаружения расширяется.
[0082] Блок 5 задания диапазона обнаружения вычисляет корректирующее расстояние, которое соответствует погрешности и коэффициенту достоверности датчика 12, в то же время обращаясь к карте. Блок 5 задания диапазона обнаружения добавляет корректирующее расстояние к диапазону обнаружения для корректировки диапазона обнаружения. Далее в данном документе диапазон обнаружения после корректировки будет также называться "скорректированным диапазоном обнаружения".
[0083] На этапе S18 блок 7 оценки скорости транспортного средства оценивает скорость транспортного средства в контрольной точке и скорость транспортного средства рассматриваемого транспортного средства при изменении полос. Скорость транспортного средства в контрольной точке оценивается тем же образом, что и в способе оценки этапа S7 согласно первому варианту осуществления. На этапе S18 точка завершения изменения полос не фиксируется, и целевая скорость транспортного средства не оценивается. Блок 7 оценки скорости транспортного средства, следовательно, вычисляет допустимую скорость в качестве скорости транспортного средства при изменении полос. Если скорость транспортного средства при изменении полос может ожидаться более низкой, чем допустимая скорость, например, вследствие структуры дороги в местоположении изменения полос, например, блок 7 оценки скорости транспортного средства может вычислять более низкую скорость транспортного средства, чем допустимая скорость, в качестве скорости транспортного средства при изменении полос.
[0084] На этапе S19 блок 8 вычисления расстояния движения вычисляет расстояние движения для рассматриваемого транспортного средства для перемещения в контрольную точку после изменения полос. Расстояние движения является расстоянием движения рассматриваемого транспортного средства, которое требуется, чтобы скорость транспортного средства при изменении полос стала скоростью транспортного средства в контрольной точке после фиксированного замедления. Скорость транспортного средства при изменении полос является скоростью транспортного средства (например, допустимой скоростью), которая оценивается посредством блока 7 оценки скорости транспортного средства. Фиксированное замедление предварительно определяется, например, предполагая характер замедления рассматриваемого транспортного средства, как, например, в случае, в котором рассматриваемое транспортное средство умеренно замедляется.
[0085] Например, когда рассматриваемое транспортное средство движется с замедлением 0,15 G после изменения полос движения и останавливается в контрольной точке, расстояние d движения представляется посредством уравнения (4) с помощью вышеописанного уравнения (3).
[0086] [Выражение 4]

Здесь v представляет скорость транспортного средства при изменении полос.
[0087] При условии, что скорость транспортного средства при изменении полос является допустимой скоростью (60 км/ч), она подставляется в уравнение (4), чтобы получать расстояние движения (d)=94,48(м).
[0088] На этапе S20 блок 6 задания точки завершения сравнивает расстояние движения со скорректированным диапазоном обнаружения. Когда расстояние движения длиннее протяженности скорректированного диапазона обнаружения, блок 6 задания точки завершения задает точку завершения изменения полос в позиции, отделенной от контрольной точки расстоянием движения в направлении, противоположном направлению движения рассматриваемого транспортного средства на этапе S21. С другой стороны, когда расстояние движения не длиннее протяженности скорректированного диапазона обнаружения, блок 6 задания точки завершения задает точку завершения изменения полос в позиции, отделенной от контрольной точки протяженностью скорректированного диапазона обнаружения в направлении, противоположном направлению движения рассматриваемого транспортного средства, на этапе S22.
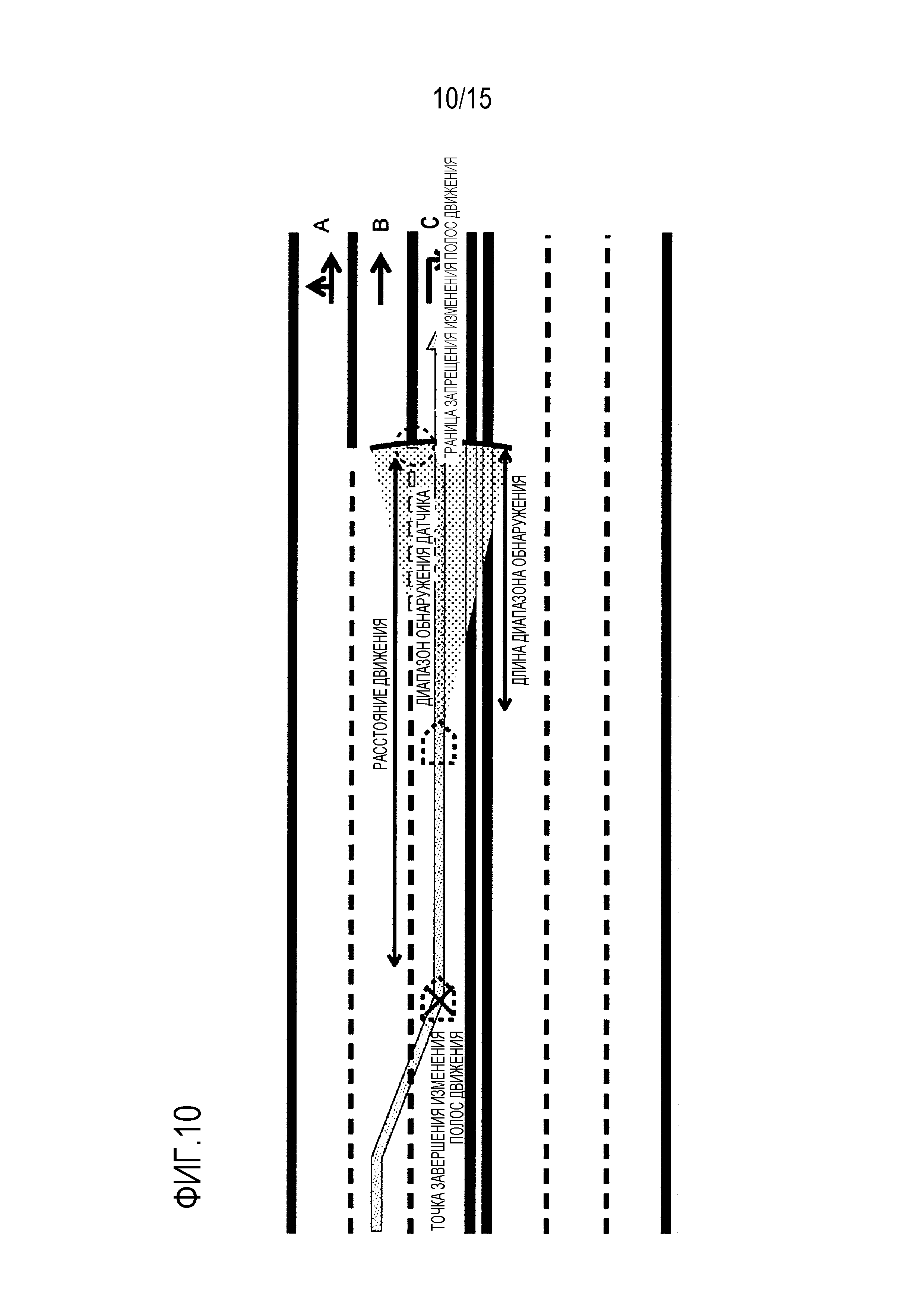
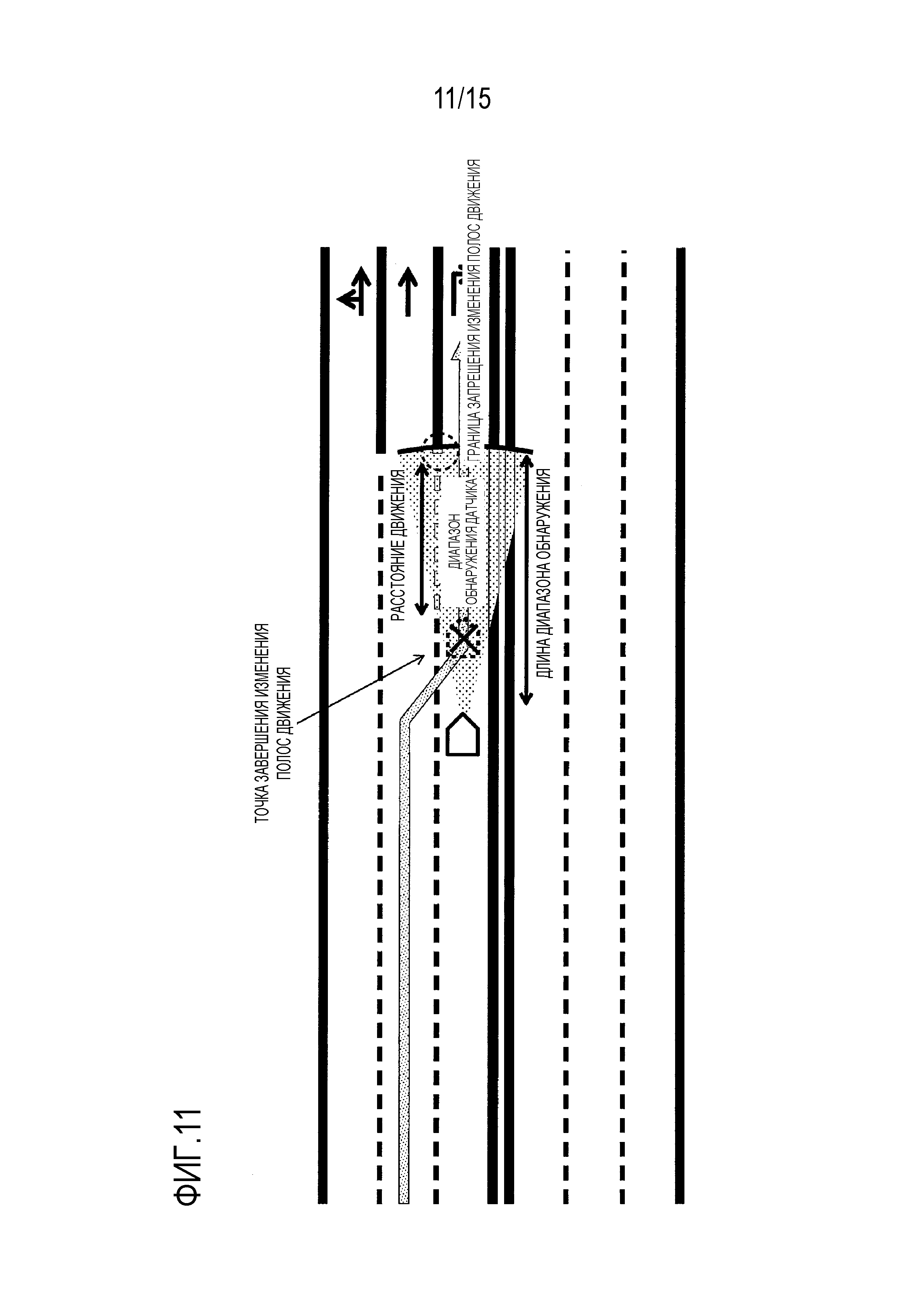
[0089] Здесь, соотношение между расстоянием движения и скорректированным диапазоном обнаружения будет описано со ссылкой на фиг. 10 и фиг. 11. Фиг. 10 и фиг. 11 являются видами, каждый для описания изменения полос на трехполосной дороге, и каждый иллюстрирует планировку дороги. Трехполосная дорога соединяется с перекрестком, расположенным впереди. Предположим, что рассматриваемое транспортное средство поменяло полосы с полосы B на полосу C. Описание ниже дано при предположении, что датчик 12 является камерой, которая имеет небольшую погрешность и высокий коэффициент достоверности (типичное значение диапазона обнаружения равно 50 метров), в описательных целях. Предположим также, что контрольная точка является концом запрета изменения полос линии 102.
[0090] Как иллюстрировано на фиг. 10, если расстояние движения длиннее протяженности диапазона обнаружения, и точка завершения изменения полос, используемая для помощи при вождении, задается на основе диапазона обнаружения датчика, точка завершения изменения полос будет находиться впереди позиции, представленной посредством расстояния движения (в направлении движения). Расстояние от позиции рассматриваемого транспортного средства до контрольной точки будет, следовательно, коротким после изменения полос, и рассматриваемое транспортное средство может быть должно быстро замедляться. Таким образом, когда расстояние движения длиннее протяженности диапазона обнаружения, блок 6 задания точки завершения задает точку завершения изменения полос на основе расстояния движения.
[0091] Как иллюстрировано на фиг. 11, если расстояние движения короче протяженности диапазона обнаружения, и точка завершения изменения полос, используемая для помощи при вождении, задается на основе расстояния движения, точка завершения изменения полос будет расположена впереди протяженности диапазона обнаружения. Контрольная точка, следовательно, будет слишком близко относительно протяженности диапазона обнаружения при изменении полос, и дорожная обстановка около контрольной точки (конец запрета изменения полос) не может быть воспринята с использованием полностью диапазона обнаружения датчика. Таким образом, когда расстояние движения короче протяженности диапазона обнаружения, блок 6 задания точки завершения задает точку завершения изменения полос на основе диапазона обнаружения.
[0092] На этапе S23 блок 7 оценки скорости транспортного средства оценивает целевую скорость транспортного средства в точке завершения изменения полос на основе скорости транспортного средства в контрольной точке (конец запрета изменения полос) и характера замедления. Когда точка завершения изменения полос задается на основе расстояния движения, блок 7 оценки скорости транспортного средства использует скорость транспортного средства, которая оценена в алгоритме управления этапа S18, в качестве целевой скорости транспортного средства. Когда точка завершения изменения полос задается на основе протяженности диапазона обнаружения, блок 7 оценки скорости транспортного средства оценивает скорость транспортного средства тем же образом, что и в алгоритме управления этапа S9 согласно первому варианту осуществления.
[0093] На этапе S24 блок 10 управления помощью при вождении выполняет управление помощью при вождении, так что рассматриваемое транспортное средство завершает изменение полос движения в точке завершения изменения полос, и скорость транспортного средства, когда изменение полосы завершается, становится целевой скоростью транспортного средства.
[0094] Таким образом, в настоящем варианте осуществления, когда местоположение, в котором изменение полосы должно быть выполнено, присутствует на полосе движения или на маршруте движения к пункту назначения, точка завершения изменения полос задается с учетом погрешности или коэффициента достоверности диапазона обнаружения датчика 12. Когда помощь при вождении выполняется так, что изменение полосы завершается в точке завершения изменения полос, следовательно, быстрые изменения полос, быстрое замедление после завершения изменения полос движения и т.п. могут быть предотвращены. Кроме того, точка завершения изменения полос задается на основе результата сравнения при сравнении диапазона обнаружения датчика 12 с расстоянием движения для движения рассматриваемого транспортного средства до контрольной точки после изменения полос. Это предоставляет возможность поведению транспортного средства во время изменения полос быть плавным.
[0095] Как описано выше, в настоящем варианте осуществления, диапазон обнаружения корректируется на основе функциональной характеристики датчика. Затем, точка завершения изменения полос задается на основе скорректированного диапазона обнаружения датчика 12. Посредством этой операции точка завершения изменения полос может быть определена с учетом погрешности датчика 12.
[0096] В настоящем варианте осуществления расстояние движения для движения рассматриваемого транспортного средства до контрольной точки после изменения полос вычисляется на основе скорости транспортного средства рассматриваемого транспортного средства после изменения полос движения и замедления от точки изменения полос до контрольной точки. Когда расстояние движения длиннее протяженности диапазона обнаружения, точка завершения изменения полос задается в позиции, отделенной от контрольной точки, по меньшей мере, расстоянием движения в направлении, противоположном направлению движения. Это предоставляет возможность поведению транспортного средства во время изменения полос быть плавным. Кроме того, расстояние между точкой изменения полос движения и контрольной точкой длиннее протяженности диапазона обнаружения датчика 12, и, следовательно, изменение полосы может быть легко выполнено, в то же время компенсируя недостаточную протяженность диапазона обнаружения.
[0097] Вышеупомянутый блок 5 задания диапазона обнаружения соответствует "блоку корректировки" настоящего изобретения.
[0098] "Третий вариант осуществления"
Фиг. 12 - это блок-схема устройства помощи при вождении согласно еще одному варианту осуществления настоящего изобретения. По сравнению с вышеописанным первым вариантом осуществления этот вариант осуществления отличается в том, что устройство помощи при вождении содержит блок 9 оценки загруженного состояния. Другие признаки являются такими же, что и признаки в вышеописанном первом варианте осуществления, и описание первого и второго вариантов осуществления могут надлежащим образом быть заимствованы при этом.
[0099] Устройство помощи при вождении включает в себя блок 9 оценки загруженного состояния в дополнение к блоку 1 обнаружения информации о транспортном средстве и т.п. Блок 9 оценки загруженного состояния оценивает загруженное состояние маршрута движения, по которому рассматриваемое транспортное средство движется, прежде чем рассматриваемое транспортное средство движется в местоположении изменения полос движения. Блок 9 оценки загруженного состояния оценивает загруженное состояние с помощью связи, например, посредством получения информации о дорожных пробках от внешнего источника для транспортного средства через беспроводную связь или т.п. или посредством обнаружения положений других транспортных средств, движущихся около транспортного средства, с помощью датчика 12. Диапазон, который должен быть оценен посредством блока 9 оценки загруженного состояния, включает в себя, по меньшей мере, маршрут от местоположения изменения полос движения до контрольной точки. Блок 9 оценки загруженного состояния выводит результат оценки в блок 5 задания диапазона обнаружения.
[0100] Затем будет описано управление устройства помощи при вождении. Фиг 13 - это блок-схема последовательности операций, иллюстрирующая алгоритм управления устройства помощи при вождении.
[0101] Алгоритм управления этапов S31-S35 является таким же, что и алгоритм управления этапов S1-S5 первого варианта осуществления.
[0102] На этапе S36 блок 9 оценки загруженного состояния оценивает загруженное состояние. При получении загруженного состояния посредством связи блок 9 получения загруженного состояния получает информацию о дорожных пробках для дороги, по которой рассматриваемое транспортное средство должно двигаться, например, с помощью VICS (система информации и связи транспортного средства, зарегистрированная торговая марка).
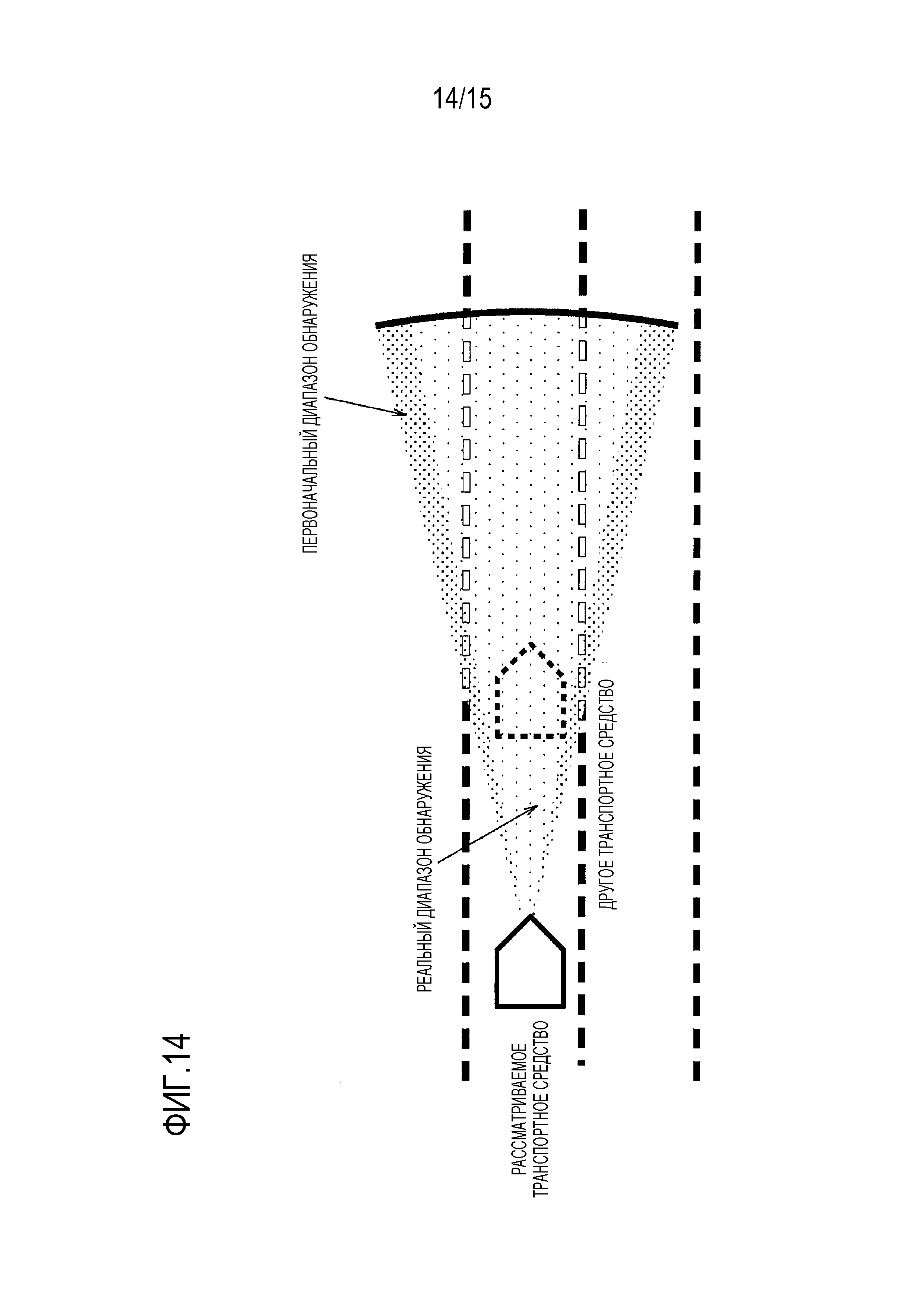
[0103] В дополнение или альтернативно, блок 9 оценки загруженного состояния может оценивать загруженное состояние с помощью датчика 12, как описано ниже. Например, когда область вокруг рассматриваемого транспортного средства загружена, и диапазон обнаружения датчика 12 блокируется другим транспортным средством, движущимся впереди рассматриваемого транспортного средства (см. фиг. 14, которая должна быть описана позже), протяженность диапазона обнаружения датчика соответствует межтранспортному расстоянию от рассматриваемого транспортного средства до другого транспортного средства, находящегося впереди. Блок 9 оценки загруженного состояния, следовательно, вычисляет межтранспортное расстояние с помощью скорости транспортного средства для рассматриваемого транспортного средства, в то же время обнаруживая другое транспортное средство посредством датчика 12. Затем, блок 9 оценки загруженного состояния сравнивает межтранспортное расстояние с протяженностью (типичным значением) диапазона обнаружения, и блок 9 оценки загруженного состояния определяет загруженное состояние, когда межтранспортное расстояние короче протяженности диапазона обнаружения. Когда диапазон обнаружения датчика 12 временно сужается, возможно, что скорее только транспортное средство, движущееся впереди, движется с низкой скоростью, чем то, что дорога загружена. В таком случае блок 9 оценки загруженного состояния не определяет, что дорога загружена. Это предоставляет возможность блоку 9 оценки загруженного состояния оценивать загруженное состояние из скорости транспортного средства для рассматриваемого транспортного средства и результата обнаружения датчика 12.
[0104] На этапе S37 блок 5 задания диапазона обнаружения корректирует диапазон обнаружения в соответствии с загруженным состоянием. Здесь, соотношение между диапазоном обнаружения датчика 12 и загруженным состоянием будет описано со ссылкой на фиг. 14. Фиг. 14 иллюстрирует состояние, в котором маршрут движения рассматриваемого транспортного средства загружен, т.е., состояние, в котором другое транспортное средство движется впереди рассматриваемого транспортного средства.
[0105] Как иллюстрировано на фиг. 14, маршрут движения загружен, и другое транспортное средство движется непосредственно впереди рассматриваемого транспортного средства. В таком случае почти вся полоса, по которой рассматриваемое транспортное средство движется, ослеплена транспортным средством, движущимся впереди, и реальный диапазон обнаружения датчика 12 становится уже первоначального диапазона обнаружения, так что диапазон обнаружения существует только с задней стороны другого транспортного средства. Поскольку, таким образом, трудно обнаруживать ситуации впереди рассматриваемого транспортного средства с помощью датчика 12, точность обнаружения датчика 12 ухудшается.
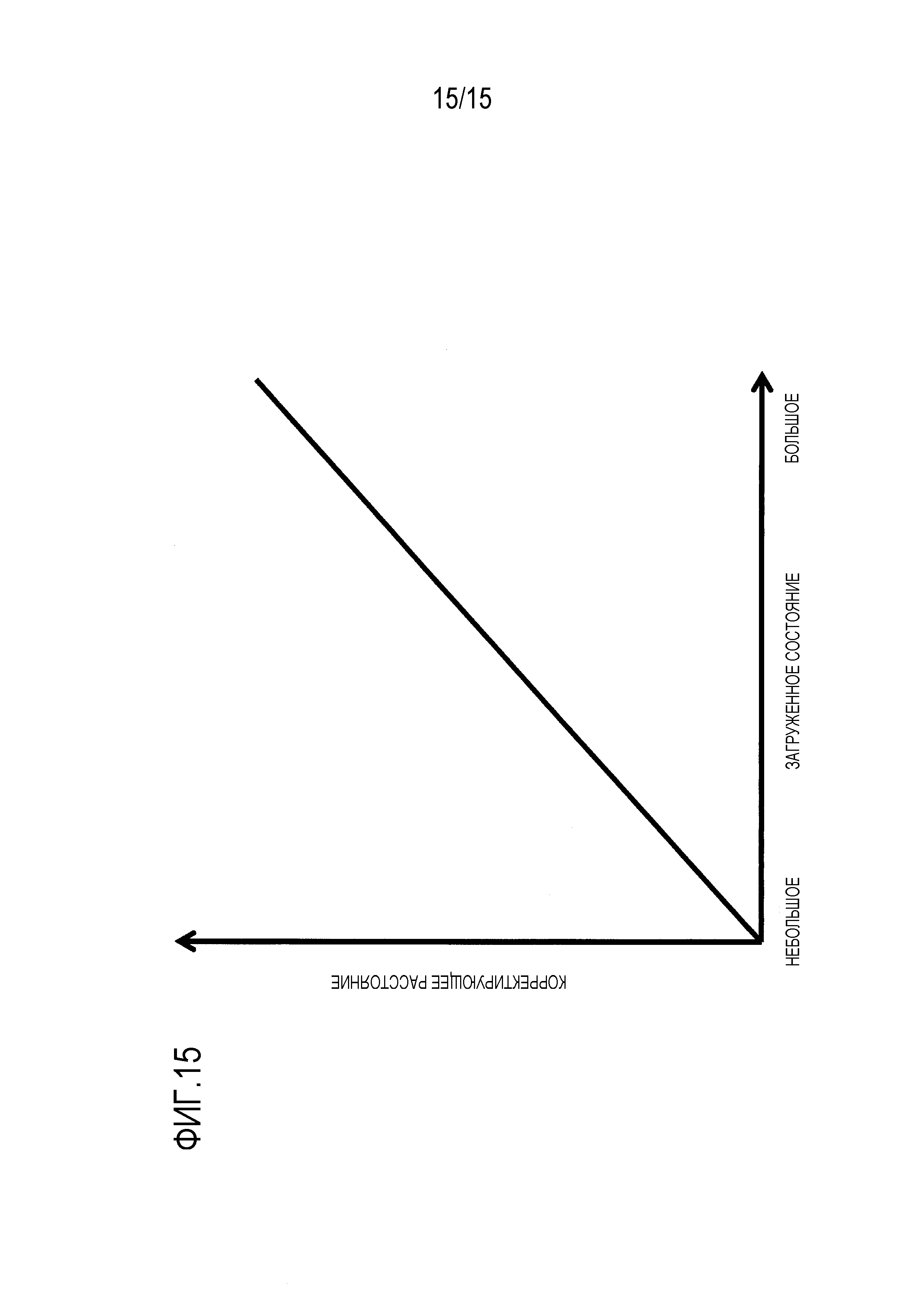
[0106] Блок 5 задания диапазона обнаружения хранит карту, которая представляет соотношение соответствия между загруженным состоянием и корректирующим расстоянием. Фиг. 15 - это график, иллюстрирующий соотношение соответствия, представленное посредством карты. Карта показывает характеристики, в которых, когда загруженное состояние увеличивается, корректирующее расстояние увеличивается, и, когда коэффициент достоверности уменьшается, корректирующее расстояние увеличивается. Корректирующее расстояние соответствует корректирующему значению для корректировки диапазона обнаружения посредством добавления к протяженности диапазона обнаружения. Когда полоса транспортного средства более загружена, загруженное состояние указывается как "большое".
[0107] Когда маршрут движения загружен, реальный диапазон обнаружения датчика 12 имеет тенденцию быть коротким, так что точность обнаружения для целевого объекта с помощью датчика 12 будет ухудшаться при управлении помощью при вождении. Чтобы компенсировать такое ухудшение в точности обнаружения блока 5 задания диапазона обнаружения, корректирующее расстояние добавляется к диапазону обнаружения, чтобы корректировать диапазон обнаружения для расширения. В частности, блок 5 задания диапазона обнаружения вычисляет корректирующее расстояние, соответствующее оцененному загруженному состоянию, в то же время обращаясь к карте. Затем, блок 5 задания диапазона обнаружения корректирует диапазон корректировки, добавляя корректирующее расстояние к диапазону обнаружения, чтобы корректировать диапазон корректировки.
[0108] На этапе S38 блок 6 задания точки завершения задает точку завершения изменения полос движения в позицию, отделенную от крайней контрольной точки протяженностью скорректированного диапазона обнаружения в направлении, противоположном направлению движения рассматриваемого транспортного средства. Алгоритм управления этапов S39-S42 является таким же, что и алгоритм управления этапов S1-S5 первого варианта осуществления.
[0109] Таким образом, в настоящем варианте осуществления, точка завершения изменения полос задается с учетом загруженного состояния маршрута движения. Когда помощь при вождении выполняется с тем, чтобы завершать изменение полос в точке завершения изменения полос, следовательно, соответствующее изменение полосы движения может быть реализовано, в то же время предотвращая быстрые изменения полос вследствие ухудшения в точности обнаружения или быстрое замедление после завершения изменения полос.
[0110] Как описано выше, в настоящем варианте осуществления, загруженное состояние маршрута движения, по которому рассматриваемое транспортное средство движется, оценивается, и диапазон обнаружения датчика 12 корректируется на основе загруженного состояния. Посредством этой операции точка завершения изменения полос движения может быть определена с тем, чтобы компенсировать ухудшение в точности обнаружения целевого объекта при использовании датчика 12.
[0111] В настоящем варианте осуществления загруженное состояние оценивается на основе ситуаций вокруг рассматриваемого транспортного средства, обнаруживаемых посредством датчика 12. Посредством этой операции может быть оценено фактическое загруженное состояние.
[0112] В настоящем варианте осуществления информация о дорожных пробках получается посредством связи, и загруженное состояние оценивается на основе информации о дорожных пробках. Это предоставляет возможность оценки загруженного состояния без помощи датчика 12.
[0113] Вышеописанный блок 9 оценки загруженного состояния соответствует "блоку оценки" настоящего изобретения.
[Описание ссылочных номеров]
[0114] 1 Блок обнаружения информации о транспортном средстве
2 Блок вычисления маршрута движения
3 Блок задания целевой точки
4 Блок задания контрольной точки
5 Блок задания диапазона обнаружения
6 Блок задания точки завершения
7 Блок оценки скорости транспортного средства
8 Блок вычисления расстояния движения
9 Блок оценки загруженного состояния
10 Блок управления помощью при вождении
11 База данных
12 Датчик

Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство вычисления маршрута движения
Устройство вычисления маршрута движения
Устройство планирования вождения, аппаратура содействия при движении и способ планирования вождения
Устройство определения окружения, аппаратура содействия при движении и способ определения окружения
Способ управления движением и устройство управления движением
Способ и устройство управления движением
Способ для управления движением транспортного средства и устройство для управления движением транспортного средства

