Результат интеллектуальной деятельности: Вертолетный радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий
Вид РИД
Изобретение
Предлагаемый комплекс относится к области сельского хозяйства и предназначен для подповерхностного зондирования сельскохозяйственных угодий, обнаружения очагов заражения сельскохозяйственных культур болезнями, лечения депрессивных участков возделываемых угодий, а также для определения местоположения источников радиоизлучений (ИРИ), например, «черных ящиков» с сигнализацией, возникающих при катастрофах самолетов.
Известны устройства и системы подповерхностного зондирования земли и контроля источников радиоизлучений (авт. свид. СССР №№642.575, 1.283.566, 1.657.988, 1.777.014, 1.812.386; патенты РФ №№2.138.037, 2.150.178, 2.275.746, 2.313.911, 2.231.037, 2.419.991, 2.600.333; патенты США №№3.806.926, 3.891.989, 3.896.439, 4.570.477, 5.038.614, 5.841.872; патенты Великобритании №№1.349.129, 1.587.357; патент Германии №3.346.155; патенты Франции №№2.447.041, 2.498.325; патенты Японии №№59-38.537, 60-24.900, 63-22.531 и другие).
Из известных устройств и систем наиболее близким к предлагаемому комплексу является устройство, реализующее способ определения места утечки жидкости или газа из трубопровода, находящегося в грунте (патент РФ №2.231.037, G01M 3/22, 2002), которое и выбрано в качестве прототипа.
Однако известное устройство обеспечивает только подповерхностное зондирование сельскохозяйственных угодий и не позволяет обнаружить очаги заражения сельскохозяйственных культур болезнями, лечить депрессивные участки возделываемых угодий и определить местоположение источников радиоизлучений (ИРИ), например, «черных ящиков» с сигнализацией, возникающих при катастрофах самолетов.
Технической задачей изобретения является расширение функциональных возможностей известного технического решения путем обнаружения очагов заражения сельскохозяйственных культур болезнями, лечения депрессивных участков возделываемых угодий и определения местоположения источников радио излучений (ИРИ), например, «черных ящиков» с сигнализацией, возникающие при катастрофах самолетов.
Поставленная задача решается тем, что вертолетный радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий, содержащий, в соответствии с ближайшим аналогом, блок подповерхностного зондирования, который состоит из четырех приемопередающих устройств, каждое из которых содержит последовательно подключенные к выходу синхронизатора передатчик, антенный переключатель, второй вход которого соединен с выходом переключателя сектора обзора, а вход-выход связан с приемопередающей антенной, приемник, второй вход которого соединен с выходом генератора строб-импульса, и блок обработки, второй вход которого соединен с выходом синхронизатора, а выход подключен к соответствующему входу цветного индикатора, пятый вход которого соединен с выходом синхронизатора, а также блок приема, подключенный к выходам антенных переключателей и синхронизатора непосредственно и через тепловизионный и телевизионный датчики соответственно, при этом приемопередающие устройства используют следующие длины волн: λ1=5 м, λ2=1 м, λ3=0,6 м и λ4=0,003 м соответственно, приемопередающие антенны размещаются на концах лопастей несущего винта вертолета, принятые ими сигналы обрабатываются по алгоритму синтезирования апертуры, а о глубине залегания подповерхностного объекта судят по цвету его изображения на экране индикатора, отличается от ближайшего аналога тем, что он снабжен лазером, тремя приемными антеннами и блоком определения местоположения источника радиоизлучений, который содержит двигатель вертолета, генератор опорного напряжения, один измерительный и четыре пеленгационных каналов, причем выход синтезатора через лазер подключен к соответствующему входу блока приема, измерительный канал содержит последовательно включенные первую приемную антенну, первый усилитель высокой частоты, смеситель, второй вход которого соединен с выходом гетеродина, усилитель промежуточной частоты, второй перемножитель, второй вход которого соединен с выходом фильтра нижних частот, первый узкополосный фильтр, первый перемножитель, второй вход которого соединен с выходом усилителя промежуточной частоты, фильтр нижних частот и блок регистрации и анализа, первый пеленгационный канал содержит последовательно включенные вторую приемную антенну, второй усилитель высокой частоты, третий перемножитель, второй вход которого соединен с выходом усилителя промежуточной частоты, второй узкополосный фильтр и первый фазометр, второй вход которого соединен с выходом гетеродина, второй пеленгационный канал содержит последовательно включенные третью приемную антенну, третий усилитель высокой частоты, четвертый перемножитель, второй вход которого соединен с выходом усилителя промежуточной частоты, и второй фазометр, второй вход которого соединен с выходом гетеродина, выходы первого и второго фазометров через блок вычитания и сумматор подключены к второму и третьему входам блока регистрации и анализа соответственно, третий пеленгационный канал содержит последовательно подключенные к выходу первой приемопередающей антенны четвертый усилитель высокой частоты, пятый перемножитель, второй вход которого соединен с выходом усилителя промежуточной частоты, четвертый узкополосный фильтр, седьмой перемножитель второй вход которого соединен с выходом пятого узкополосного фильтра, шестой узкополосный фильтр и третий фазометр, второй вход которого соединен с выходом генератора опорного напряжения, а выход подключен к четвертому входу блока регистрации и анализа, четвертый пеленгационный канал содержит последовательно подключенные к выходу второй приемопередающей антенны пятый усилитель высокой частоты, шестой перемножитель, второй вход которого соединен с выходом усилителя промежуточной частоты, пятый узкополосный фильтр, линию задержки, фазовый детектор, второй вход которого соединен с выходом пятого узкополосного фильтра, и четвертый фазометр, второй вход которого соединен с выходом генератора опорного напряжения, а выход подключен к пятому входу блока регистрации и анализа, первая приемная антенна размещена над втулкой винта вертолета, вторая и третья приемные антенны размещена на фюзеляже и средней части корпуса вертолета соответственно, двигатель кинематически связан с винтом вертолета и генератором опорного напряжения.
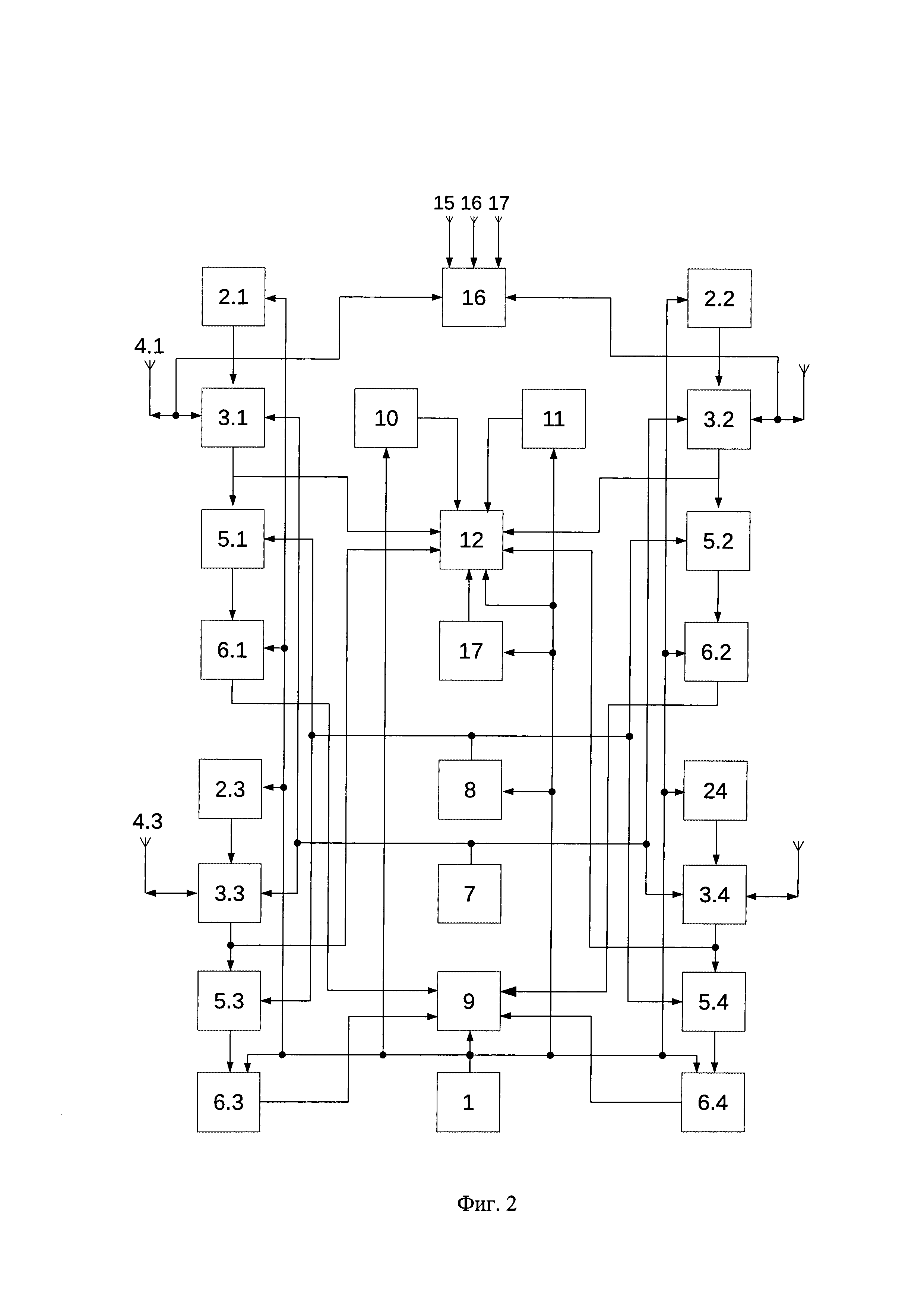
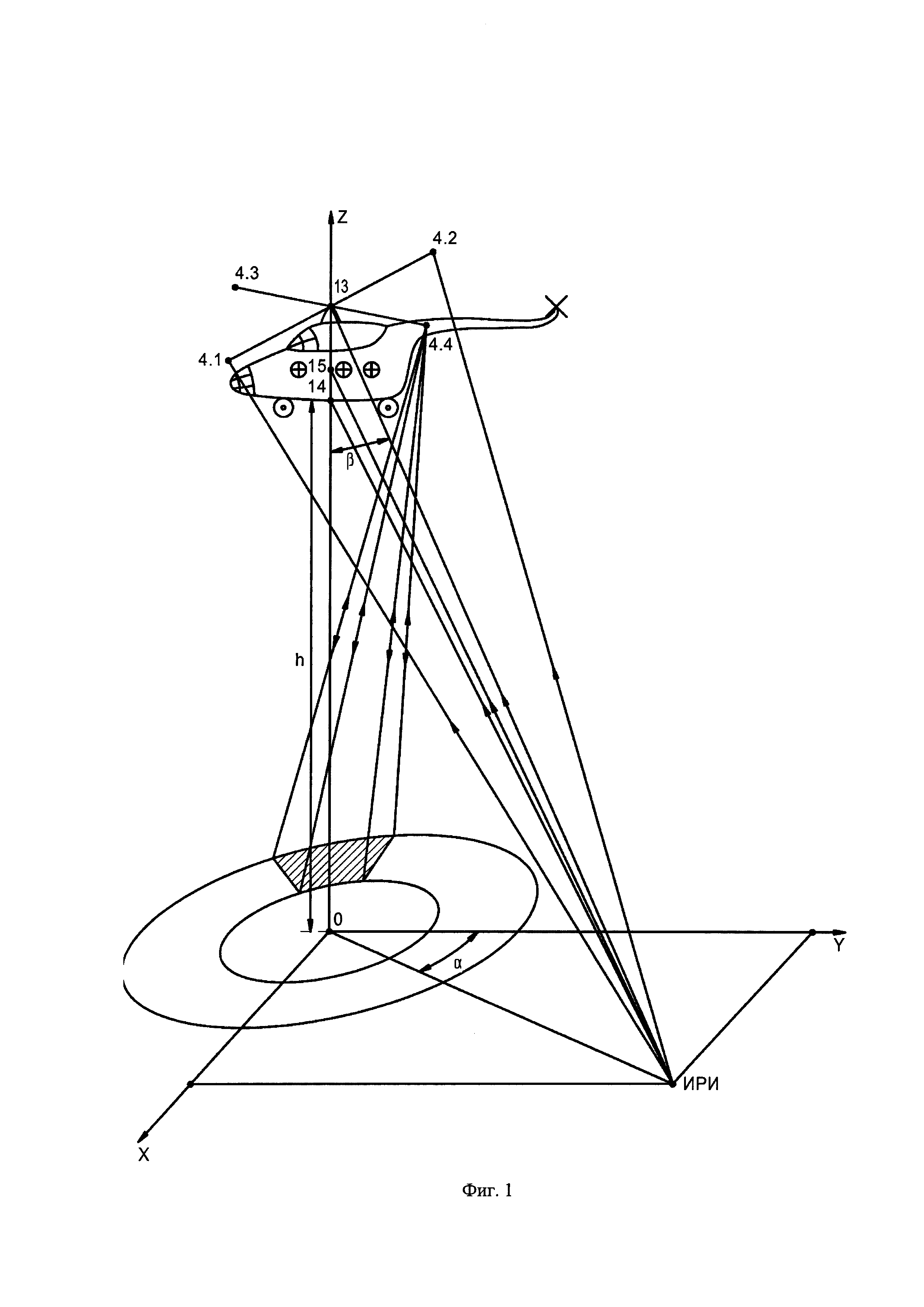
Геометрическая схема расположения источника радиоизлучений (ИРИ) и вертолета, а также расположения антенн на вертолете показаны на фиг. 1. Структурна схема блока подповерхностного зондирования представлена на фиг. 2. Структурная схема блока 16 определения местоположения ИРИ изображена на фиг. 3. Принцип формирования измерительных баз косвенным методом на борту вертолета в вертикальной (угломестной) плоскости показан на фиг. 4. Характеристики проникновения радиоволн различных длин изображены на фиг. 5. Значения угловой разрешающей способности при различных длинах волн представлены на фиг. 6.
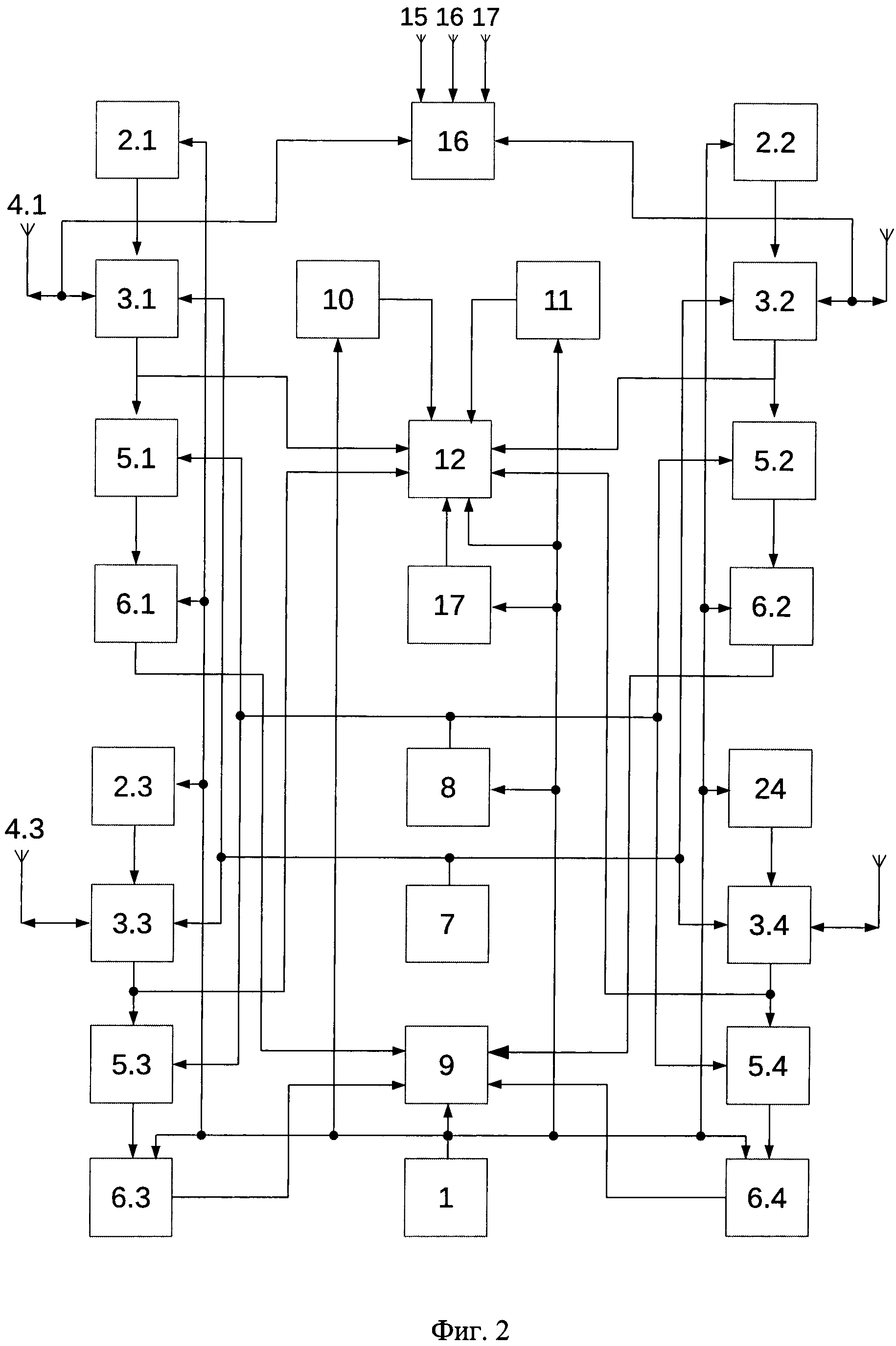
Блок подповерхностного зондирования состоит из четырех приемопередающих устройств, каждое из которых содержит последовательно подключенные к выходу синхронизатора 1 передатчик 2.1 (2.2, 2.3, 2.4), антенный переключатель 3.1 (3.2, 3.3.,3.4), второй вход которого соединен с выходом переключателя 7 сектора обзора, а вход-выход связан с приемопередающей антенной 4.1 (4.2, 4.3, 4.4), приемник 5.1. (5.2, 5.3, 5.4), второй вход которого соединен с выходом генератора 8 строб-импульса, и блок 6.1 (6.2, 6.3, 6.4) обработки, второй вход которого соединен с выходом синхронизатора 1, а выход подключен к соответствующему входу цветного индикатора 9, пятый вход которого соединен с выходом синхронизатора 1, а также блок 12 приема, подключенный к выходам антенных переключателей 3.1-3.4 и синхронизатора 1 непосредственно и через лазер 17, тепловизионный 10 и телевизионный 11 датчики соответственно. При этом приемопередающие устройства используют следующие длины волн: λ1=5 м, λ2=1 м, λ3=0,6 м и λ4=0,003 м соответственно. Приемопередающие антенны 4.1.-4.4 размещаются на концах лопастей несущего винта вертолета, принятые ими сигналы обрабатываются по алгоритму синтезирования апертуры, а о глубине залегания подповерхностного объекта судят по цвету его изображения на экране индикатора 9.
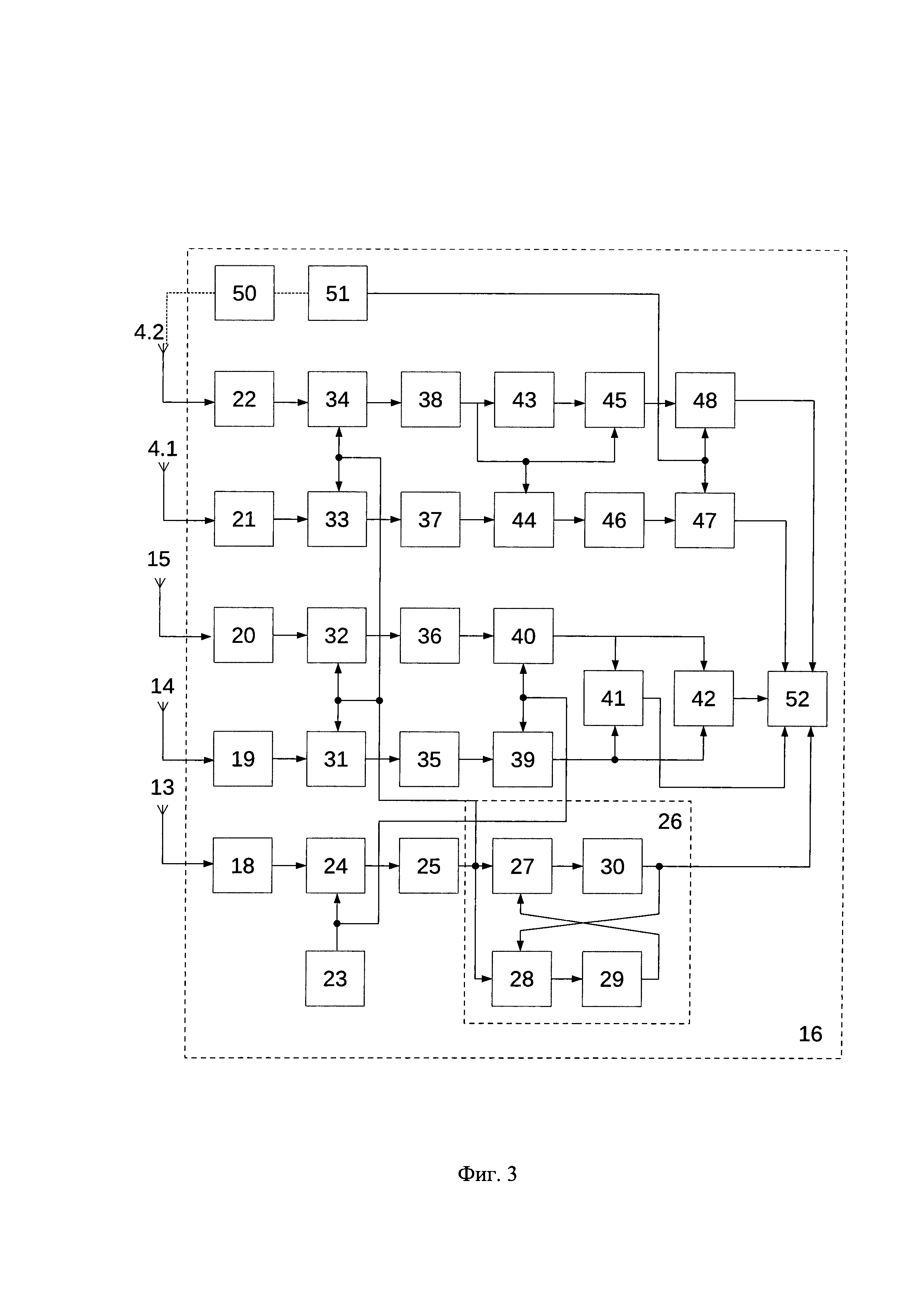
Блок 16 определения местоположения ИРИ содержит двигатель 50 вертолета, генератор 51 опорного напряжения, один измерительный и четыре пеленгационных каналов.
Измерительный канал содержит последовательно включенные первую приемную антенну 13, первый усилитель 18 высокой частоты, смеситель 24, второй вход которого соединен с выходом гетеродина 23, усилитель 25 промежуточной частоты, второй перемножитель 28, второй вход которого соединен с выходом фильтра 30 нижних частот, первый узкополосный фильтр 29, первый перемножитель 27, второй вход которого соединен с выходом усилителя 25 промежуточной частоты, фильтр 30 нижних частот и блок 52 регистрации и анализа. Перемножители 27 и 28, узкополосный фильтр 29 и фильтр 30 нижних частот образуют демодулятор 26 сложных сигналов с фазовой манипуляцией (ФМн).
Первый пеленгационный канал содержит последовательно включенные вторую приемную антенну 14, второй усилитель 19 высокой частоты, третий перемножитель 31, второй вход которого соединен с выходом усилителя 25 промежуточной частоты, второй узкополосный фильтр 35 и первый фазометр 39, второй вход которого соединен с выходом гетеродина 23.
Второй пеленгационный канал содержит последовательно включенные третью приемную антенну 15, третий усилитель 20 высокой частоты, четвертый перемножитель 32, второй вход которого соединен с выходом усилителя 25 промежуточной частоты, и второй фазометр 40, второй вход которого соединен с выходом гетеродина 23. Выходы первого 39 и второго 40 фазометров через блок 41 вычитания и сумматор 42 подключены к второму и третьему входам блока регистрации и анализа соответственно.
Третий пеленгационный канал содержит последовательно подключенные к выходу первой приемопередающей антенны 41 четвертый усилитель 21 высокой частоты, пятый перемножитель 33, второй вход которого соединен с выходом усилителя 25 промежуточной частоты, четвертый узкополосный фильтр 37, седьмой перемножитель 44, второй вход которого соединен с выходом пятого узкополосного фильтра 38, шестой узкополосный фильтр 46 и третий фазометр 47, второй вход которого соединен с выходом генератора 51 опорного напряжения, а выход подключен к пятому входу блока 52 регистрации и анализа.
Четвертый пеленгационный канал содержит последовательно подключенные к выходу второй приемопередающий антенне 4.2 пятый усилитель 22 высокой частоты, шестой перемножитель 34, второй вход которого соединен с выходом усилителя 25 промежуточной частоты, пятый узкополосный фильтр 38, линию задержки 43, фазовый детектор 45, второй вход которого соединен с выходом пятого узкополосного фильтра 38, и четвертый фазометр 48, второй вход которого соединен с выходом генератора 51 опорного напряжения, а выход подключен к пятому входу блока 52 регистрации и анализа.
Первая приемная антенна 13 размещена над втулкой винта вертолета, вторая 14 и третья 15 приемные антенны размещены на фюзеляже и средней части корпуса вертолета соответственно.
Двигатель 50 кинематически связан с винтом вертолета и генератором 51 опорного напряжения.
Предлагаемый радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий работает следующим образом в трех режимах:
1) в режиме подповерхностного зондирования;
2) в режиме обнаружения очагов заражения сельскохозяйственных культур и лечения депрессивных участков возделываемых угодий;
3) в режиме определения местоположения источников радиоизлучений (ИРИ), например, «черных ящиков» с сигнализацией, возникающих при катастрофах самолетов.
Реализация первого режима.
Вырабатываемые в синхронизаторе 1 импульсы запускают четыре передатчика 2.1-2.4 и управляют четырьмя блоками 6.1-6.4 обработки сигналов. Импульсы синхранизатора 1 также управляют работой генератора 8 строб-импульсов, цветного индикатора 9, тепловизионного 10 и телевизионного 11 датчиков, блока 12 приема и лазера 17. Длительность и положение во времени строб-импульса определяют положение и протяженность наблюдаемого элемента земной поверхности по дальности. Этот импульс и подается на блоки 6.1-6.4 обработки.
Каждый передатчик работает на своей длине волны, которая определяет глубину проникновения электромагнитного излучения под подстилающую поверхность.
Зондирующие импульсы с передатчиков 2.1-2.4 через антенные переключатели 3.1-3.4 поступают на свои антенны 4.1-4.4, каждая из которых расположена на конце лопасти несущего винта вертолета (фиг. 1).
Каждая антенна, расположенная на конце вращающейся лопасти, подключается к своему передатчику и приемнику только в момент прохождения определенного заранее установленного сектора обзора. Это осуществляется с помощью переключателя 7 сектора обзора, который представляет собой электрический контакт, выполненный в виде четырех щеток, расположенных под соответствующими лопастями, перемещающихся в процессе вращения по неподвижному токопроводящему сегменту, который в свою очередь может устанавливаться в фиксированном положении вокруг оси винта. Каждые передатчик и приемник подключаются к антенне только в период прохождения соответствующей щетки по сегменту. Положение сегмента определяет положение сектора обзора в пространстве.
С антенны 4.1-4.4 сигналы излучаются в направлении подстилающей поверхности, для обнаружения подповерхностных объектов, в качестве которых могут быть трубопроводы, металлические различные конструкции, мины, боеприпасы и т.п. Отраженные от подповерхностного объекта сигналы принимаются антеннами 4.1-4.4 и через антенные переключатели 3.1-3.4 подаются на приемники 5.1-5.4, а затем на блоки 6.1-6.4 обработки, в которых осуществляется обработка принятых сигналов по алгоритму синтезирования апертуры. В этих же блоках учитывается эффект изменения дальности от антенны до подповерхностного объекта, вызванный перемещением антенн по окружности в процессе синтезирования. В блоках 6.1-6.4 обработки обрабатываются сигналы, принятые только с определенного участка дальности, положение и протяженность которого определяется стробирующим импульсом, подавляемым с генератора 7. С блоков 6.1-6.4 обработки сигналы поступают на индикатор 9 с цветным изображением, причем сигналы с каждого блока обработки соответствуют изображению в определенном цвете.
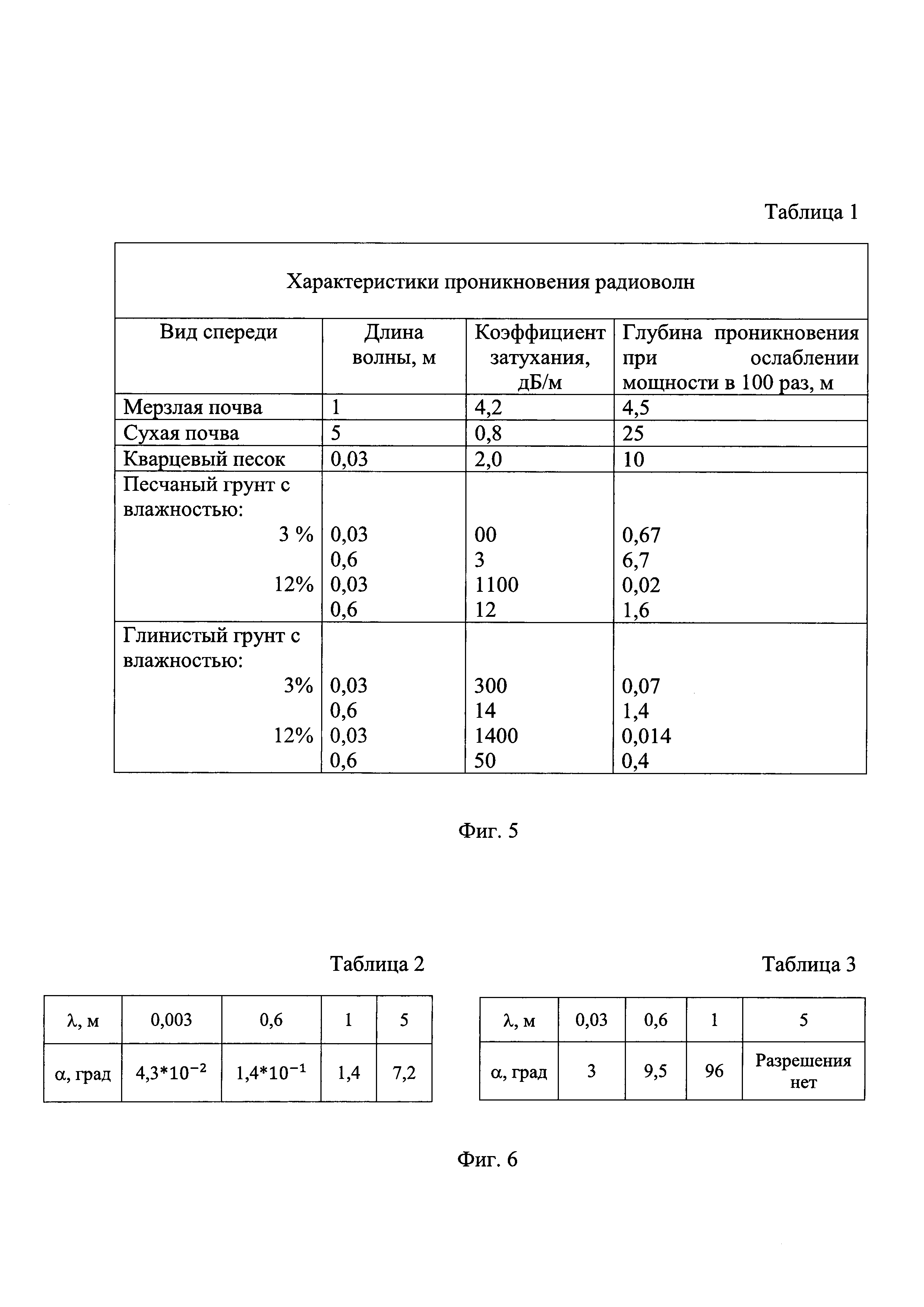
Применение четырех радиолокаторов с λ1=5 м, λ2=1 м, λ3=0,6 м и λ4=0,003 м с синтезированной апертурой позволяет обнаружить и определить координаты подповерхностного объекта, расположенного под подстилающей поверхностью земли, с высокой угловой разрешающей способностью. При этом одновременно по цвету изображения можно судить о глубине расположенного объекта под поверхностью земли.
Если в качестве подповерхностного объекта используется заглубленный трубопровод, то тепловизионный датчик 10 позволяет зафиксировать физический признак утечки газа в виде локального понижения температуры (отрицательного теплового контраста на поверхности покрытия газопровода в районе течи) вследствие проявления дроссельного эффекта при истечении газа из газопровода. При этом возможные поверхностные тепловые контрасты в районе течи, по имеющимся экспериментальным и расчетным данным, составляют до 8-10°С, что существенно превышает пороговые характеристики контрастной чувствительности тепловизионных приборов (0,5-1,0°С) и соответственно, может быть выявлено измерениями.
Анализ возможностей использования предлагаемого комплекса на существующих вертолетах с длиной лопасти 1-20 м, числом оборотов винта 200 об/мин, позволяет получить следующие значения угловой разрешающей способности на разных глубинах, соответствующих длинам рабочих волн, значения которой при эффективной длине синтезированной апертуры 20 м приведена в таблице 2 (фиг. 6).
Для сравнения в таблице 3 (фиг. 6) приведены значений угловой разрешающей способности при различных длинах волн, которые можно обеспечить без синтезирования при ширине лопасти d=600 мм (α=λ/d).
Совместное рассмотрение таблиц 2 и 3 (фиг. 6) позволяет сделать вывод о том, что предлагаемый комплекс позволяет повысить угловую разрешающую способность при тех же длинах волн приблизительно в 100 раз.
Реализация второго режима.
С помощью телевизионного датчика 11 производят поиск на возделываемых угодьях очагов развития болезней сельскохозяйственных культур, размножения вредителей, депрессивных участков, требующих лечения. Сразу после обнаружения на возделываемых угодьях очагов развития болезней сельскохозяйственных культур, размножения вредителей производят техногенные воздействия с помощью лазерного излучения. При этом используется лазер 17 с размытым лучом с углом 4-7°. Для этого вертолет зависает над заданным участком возделываемого угодья на заданной высоте для наблюдения или выполнения технологической операции.
Блок 12 приема обеспечивает сравнение характеристик видеоизображений сельскохозяйственных культур на различных участках возделываемого угодья с базой данных и по наличию отклонений этих характеристик от эталона выявляют участки, на которых находятся очаги развития болезней сельскохозяйственных культур и размножения вредителей.
Одной из причин появления вредителей сельскохозяйственных культур на возделываемом угодье является наличие их яиц в семенном материале и в почве (колорадский жук и др.). Период от фиксации первых особей вредителей из яиц до их массового распространения крайне мал и может составлять от нескольких часов до нескольких дней. Реализация необходимых воздействий на сельскохозяйственные культуры для уничтожения вредителей оперативно, сразу после обнаружения вредителей сокращает до возможного минимума негативные воздействия на выполняемые технологические процессы, обусловленные деятельностью вредителей. При этом урожайность и качество сельскохозяйственных культур практически не снижаются, а объемы применяемых для уничтожения вредителей технических средств минимальны.
Существующие технологии и устройства оперативного воздействия на технологические процессы возделывания сельскохозяйственных культур требуют использования наземных транспортных средств, травмирующих почву и сельскохозяйственные культуры. Например, при возделывании пшеницы снижение урожая в отдельных случаях может достигать 0,1%, что при промышленном производстве в денежном выражении существенно. При использовании предлагаемого комплекса эти потери можно свести к минимуму, диагностику и лечение возделываемых угодий осуществляют более точно и оперативно. При этом получение информации и воздействия на технологические процессы осуществляют в автоматическом режиме, без травмирования сельскохозяйственных культур и почвы возделываемых угодий.
Реализация третьего режима.
Во время катастрофы вместе с самолетом падает на землю и «черный ящик» и при ударе о землю у него выходят из строя составные части, которые затем с большим трудом восстанавливаются. А если катастрофа самолета произошла над морем, тогда «черный ящик» вместе с самолетом падает в море, который без соответствующей сигнализации в нем весьма трудно отыскать в глубине моря.
Для исключения совместного падения «черного ящика» с самолетом во время его катастрофы разработано техническое решение (патент РФ №2.531.779), в котором при катастрофе самолета «черный ящик» отделяется от него и спускается на парашюте на землю или поверхность моря. Когда «черный ящик» достигает определенной высоты от земли или от поверхности моря, автоматически раскрывается парашют, резиновая камера наполняется воздухом, поступающим из камеры сжатого воздуха, включа6ется приемник GPS - сигналов и излучатель сигнала бедствия. При этом резиновая камера обеспечивает сохранность «черного ящика» с сигнализацией при его падении на землю и служит поплавком при его падении на море.
«Черный ящик» с сигнализацией (ИРИ) излучает сложный сигнал с фазовой манипуляцией (ФМн) (сигнал бедствия)
uc(t)=Uc⋅Cos[ωct+(ϕk(t)+ϕс], 0≤t≤Тс,
где Uc, ωc. ϕс, Тс- амплитуда, несущая частота, начальная фаза и длительность сигнала;
ϕk(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляцией в соответствии с модулирующим кодом М (t), который содержит информацию о бортовом номере самолета, его принадлежность к фирме, стране и т.д.
Указанный сигнал принимается антеннами 13, 14, 15, 4.1 и 4.2. соответственно блока 16 определения местоположения ИРИ («черного ящика» с сигнализацией):
u1(t)=U2⋅Cos[(ωc±Δω)t+ϕk(t)+ϕ1],
u2(t)=U2⋅Cos[(ωc±Δω)t+ϕk(t)+ϕ2],
u3(t)=U3⋅Cos[(ωc±Δω)t+ϕk(t)+ϕ3],

 ,
,
где ±Δω - нестабильность несущей частоты сигналов, обусловленная различными дестабилизирующими факторами, в том числе и эффектом Доплера;
R - радиус окружности, на которой размещены антенны 4.1 и 4.2 (длина лопасти несущего винта вертолета);
Ω=2πR - скорость вращения антенн 4.1 и 4.2 вокруг антенны 13 (скорость вращения винта вертолета);
λ - длина волны;
α - пеленг (азимут) на ИРИ.
Сложный сигнал с фазовой манипуляцией (ФМн) u1(t) с выхода первой приемной антенны 13 через усилитель 18 высокой частоты поступает на первый вход смесителя 24, на второй вход которого подается напряжение гетеродина 23
ur(t)=Ur⋅Cos(ωrt+ϕr).
На выходе смесителя 24 образуются напряжения комбинационных частот.
Усилителем 25 выделяется напряжение промежуточной (разностной) частоты
uпр(t)=Unp⋅Cos[(ωпр±Δω)t+ϕk(t)+ϕпр], 0≤t≤Тс,
где  ;
;
ωпр=ωс-ωг- промежуточная (разностная) частота;
ϕпр=ϕс-ϕг,
которое поступает на первые входы перемножителей 27 и 28. На второй вход перемножителя 27 подается опорное напряжение с выхода узкополосного фильтра 29
u0(t)=U0⋅Cos[(ωпр±Δω)t+ϕпр].
На выходе перемножителя 27 образуются напряжения:
uΣ(t)=Uн⋅Cosϕk(t)+UнCos[2(ωпр±Δω)t+ϕk(t)+2ϕпр],
где 
Низкочастотное напряжение uн(t) выделяется фильтром 30 нижних частот
uн(t)=Uн⋅Cosϕк(t), 0≤t≤Tc,
и поступает на первый вход блока 52 регистрации и анализа. Это напряжение пропорционально модулирующему коду М (t).
Одновременно низкочастотное напряжение uн(t) подается на второй вход перемножителя 28, на выходе которого образуется опорное напряжение
uo(t)=U1⋅Cos[(ωпр±Δω)t+ϕпр]+U1⋅Cos[(ωпр±Δω)+2ϕк(t)+ϕпр]=U0⋅Cos[(ωпр±Δω)t+ϕпр],
где U1=Uпр⋅Uo; Uo=2U1,
которое выделяется узкополосным фильтром 29 и подается на второй вход перемножителя 27.
Сложные ФМн сигналы u2(t), u3(t), u4(t) и u5(t) с выходов антенн 14, 15, 4.1 и 4.2 через усилителем 19-22 высокой частоты поступают на первые входы перемножителй 31-34, на вторые входы которых подается напряжение uпр(t) с выхода усилителя 25 промежуточной частоты. На выходе перемножителей 31-34 образуются следующие напряжения:
u6(t)=U6⋅Cos(ωгt+ϕг+Δϕ1),
u7(t)=U7⋅Cos(ωгt+ϕг+Δϕ2),
 ,
,
 , 0≤t≤Tc,
, 0≤t≤Tc,
где  ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
d1, d2 - измерительные базы (фиг. 4)
которые выделяются узкополосными фильтрами 35-38.
Знаки «+» и «-» перед величиной  соответствуют диаметрально противоположным расположениями приемных антенн 4.1 и 4.2 на концах лопастей несущего винта вертолета относительно приемной антенны 13, размещенной над втулкой винта вертолета.
соответствуют диаметрально противоположным расположениями приемных антенн 4.1 и 4.2 на концах лопастей несущего винта вертолета относительно приемной антенны 13, размещенной над втулкой винта вертолета.
Следовательно, полезная информация об азимуте α и угле места β переносится на стабильную частоту ωг гетеродина 23.
Поэтому нестабильность несущей частоты ±Δω, вызванная различными дестабилизирующими факторами, и вид модуляции (манипуляции) принимаемых сигналов ИРИ не влияют на результат пеленгации, тем самым повышается точность определения местоположения ИРИ («черного ящика» с сигнализацией).
Фазометры 39 и 40 измеряют фазовые сдвиги Δϕ1 и Δϕ2 соответственно, которые поступают на два входа блока 41 вычитания и сумматора 42.
Блок 41 вычитания определяет разность фаз:
Δϕр=Δϕ1-Δϕ2,
эквивалентную измерению фазового сдвига на измерительной базе, длина которой определяется следующей разностью
d3=d1-d2.
Сумматор 42 определяет сумму разностей фаз
ΔϕΣ=Δϕ1+Δϕ2,
эквивалентную измерению фазового сдвига на измерительной базе, длина которой определяется следующей суммой
d4=d1+d2.
Следовательно, в вертикальной (угломестной) плоскости для определения угла места ИРИ («черного ящика» с сигнализацией) используются три приемные антенны 13, 14 и 15 с измерительными базами d1 и d2. Вследствие конструктивных особенностей вертолета грубая, но однозначная шкала отсчета угла места β и точная, но неоднозначная шкала отсчета угла места β ИРИ формируются косвенным методом. Между сформированными шкалами и измерительными базами d3 и d4 устанавливается следующее неравенство:
Причем величина, входящая в состав указанных колебаний  и называемая индексом фазовой модуляции, характеризует максимальное значение отклонения фазы сигналов, принимаемых вращающимися антеннами 4.1 и 4.2 относительно фазы сигнала, принимаемого неподвижной антенной 13. Пеленгаторное устройство тем чувствительнее к изменению угла α, чем больше относительный размер измерительной базы R/λ. Однако с ростом R/λ уменьшается значение угловой координаты α, при котором разность фаз превосходит значение 2π, т.е. наступает неоднозначность отсчета угла α.
и называемая индексом фазовой модуляции, характеризует максимальное значение отклонения фазы сигналов, принимаемых вращающимися антеннами 4.1 и 4.2 относительно фазы сигнала, принимаемого неподвижной антенной 13. Пеленгаторное устройство тем чувствительнее к изменению угла α, чем больше относительный размер измерительной базы R/λ. Однако с ростом R/λ уменьшается значение угловой координаты α, при котором разность фаз превосходит значение 2π, т.е. наступает неоднозначность отсчета угла α.
Следовательно, при  наступает неоднозначность отсчета угла α. Устранение указанной неоднозначности путем уменьшения отношения R/λ, обычно себя не оправдывает, так как при этом теряется основное достоинство широкобазовой системы. Кроме того, в диапазоне метровых и особенно дециметровых волн брать малые значения R/λ, часто не удается из-за конструктивных соображений.
наступает неоднозначность отсчета угла α. Устранение указанной неоднозначности путем уменьшения отношения R/λ, обычно себя не оправдывает, так как при этом теряется основное достоинство широкобазовой системы. Кроме того, в диапазоне метровых и особенно дециметровых волн брать малые значения R/λ, часто не удается из-за конструктивных соображений.
Для повышения точности пеленгации ИРИ («черного ящика» с сигнализацией) в горизонтальной (азимутальной) плоскости приемные антенны 4.1 и 4.2 размещаются на концах лопастей несущего винта вертолета. Смешение сигналов от двух диаметрально противоположных антенн 4.1. и 4.2, находящихся на одинаковом расстоянии R от оси вращения несущего винта, вызывает фазовую модуляцию, получаемую с помощью одной приемной антенны, вращающейся по кругу, радиус R, которого в два раза больше (R1=2R).
Действительно, на выходе перемножителя 44 образуется гармоническое напряжение
u10(t)=U10⋅Cos(Ω-α), 0≤t≤Тс,
где  ,
,
с индексом фазовой модуляции
 , R1=2R,
, R1=2R,
которое выделяется узкополосным фильтром 46 и поступает на первый вход фазометра 47, на второй вход которого подается напряжение генератора 51
uo(t)=Uo⋅CosΩt.
Фазометр 47 обеспечивает точное, но неоднозначное измерение угловой координаты α.
Для устранения возникающей при этом неоднозначности отсчета угла α необходимо уменьшить индекс фазовой модуляции без уменьшения отношения R/λ. Это достигается использованием автокоррелятора, состоящего из линии задержки 43 и фазового детектора 45, что эквивалентно уменьшению индекса фазовой модуляции до величины
 ,
,
где d1<R.
На выходе автокоррелятора образуется напряжение
u11(t)=U11⋅Cos(Ω-α), 0≤t≤Тс,
с индексом фазовой модуляции Δϕm2, которое поступает на первый вход фазометра 48, на второй вход которого подается напряжение uo(t) генератора 51 опорного напряжения. Фазометр 48 обеспечивает грубое, но однозначное измерение угловой координаты α.
Значение угловой координаты α с выходов фазометров 47 и 48 фиксируются на четвертом и пятом входах блока 52 регистрации и анализа.
Измерив угловые координаты α, β и зная высоту полета h вертолета, можно точно и однозначно определить местоположение ИРИ («черный ящик» с сигнализацией).
Таким образом, предлагаемый вертолетный радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает не только зондирование подповерхностных объектов, но и позволяет обнаружить очаги заражения сельскохозяйственных культур болезнями и лечить депрессивные участки возделываемых угодий, а также определить местоположение источников радиоизлучений (ИРИ), например, «черных ящиков» с сигнализацией, возникающих при катастрофах самолетов.
При этом применение предлагаемого комплекса повышает эффективность процессов оперативного воздействия на технологические процессы возделывания сельскохозяйственных культур, эффективность управления процессами возделывания сельскохозяйственных культур в режиме реального времени. При этом получение информации и воздействие на технологические процессы осуществляют в автоматическом режиме, без травмирования сельскохозяйственных культур и почвы возделываемых угодий.
Предлагаемый комплекс обеспечивает повышение оперативности поиска «черного ящика» с сигнализацией. Это достигается излучением сложных сигналов с фазовой манипуляцией (ФМн), отображающих идентификационные данные самолета, потерпевшего катастрофу, и место его катастрофы.
Сложные ФМн сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность указанных сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Сложные ФМн сигналы открывают большие возможности в технике передачи сигналов бедствия «черными ящиками» с сигнализацией самолетов, потерпевших катастрофу.
Они позволяют применять на вертолете структурную селекцию. Это значит, что появляется возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
Тем самым функциональные возможности известного технического решения расширены.
Вертолетный радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий, содержащий блок подповерхностного зондирования, который состоит из четырех приемопередающих устройств, каждое из которых содержит последовательно подключенные к выходу синхранизатора передатчик, антенный переключатель, второй вход которого соединен с выходом переключателя сектора обзора, а вход-выход связан с приемопередающей антенной, приемник, второй вход которого соединен с выходом генератора строб-импульса, и блок обработки, второй вход которого соединен с выходом синхронизатора, а выход подключен к соответствующему входу цветного индикатора, пятый вход которого соединен с выходом синхронизатора, а также блок приема, подключенный к выходам антенных переключателей и синхронизатора непосредственно и через тепловизионный и телевизионный датчики соответственно, при этом приемопередающие устройства используют следующие длины волн: λ=5 м, λ=1 м, λ=0,6 м и λ=0,003 м соответственно, приемопередающие антенны размещаются на концах лопастей несущего винта вертолета, принятые ими сигналы обрабатываются по алгоритму синтезирования апертуры, а о глубине залегания подповерхностного объекта судят по цвету его изображения на экране индикатора, отличающийся тем, что он снабжен лазером, тремя приемными антеннами и блоком определения местоположения источника радиоизлучений, который содержит двигатель вертолета, генератор опорного напряжения, один измерительный и четыре пеленгационных канала, причем выход синтезатора через лазер подключен к соответствующему входу блока приема, измерительный канал содержит последовательно включенные первую приемную антенну, первый усилитель высокой частоты, смеситель, второй вход которого соединен с выходом гетеродина, усилитель промежуточной частоты, второй перемножитель, второй вход которого соединен с выходом фильтра нижних частот, первый узкополосный фильтр, первый перемножитель, второй вход которого соединен с выходом усилителя промежуточной частоты, фильтр нижних частот и блок регистрации и анализа, первый пеленгационный канал содержит последовательно включенные вторую приемную антенну, второй усилитель высокой частоты, третий перемножитель, второй вход которого соединен с выходом усилителя промежуточной частоты, второй узкополосный фильтр и первый фазометр, второй вход которого соединен с выходом гетеродина, второй пеленгационный канал содержит последовательно включенные третью приемную антенну, третий усилитель высокой частоты, четвертый перемножитель, второй вход которого соединен с выходом усилителя промежуточной частоты, и второй фазометр, второй вход которого соединен с выходом гетеродина, выходы первого и второго фазометров через блок вычитания и сумматор подключены ко второму и третьему входам блока регистрации и анализа соответственно, третий пеленгационный канал содержит последовательно подключенные к выходу первой приемопередающей антенны четвертый усилитель высокой частоты, пятый перемножитель, второй вход которого соединен с выходом усилителя промежуточной частоты, четвертый узкополосный фильтр, седьмой перемножитель, второй вход которого соединен с выходом пятого узкополосного фильтра, шестой узкополосный фильтр и третий фазометр, второй вход которого соединен с выходом генератора опорного напряжения, а выход подключен к четвертому входу блока регистрации и анализа, четвертый пеленгационный канал содержит последовательно подключенные к выходу второй приемопередающей антенны пятый усилитель высокой частоты, шестой перемножитель, второй вход которого соединен с выходом усилителя промежуточной частоты, пятый узкополосный фильтр, линию задержки, фазовый детектор, второй вход которого соединен с выходом пятого узкополосного фильтра, и четвертый фазометр, второй вход которого соединен с выходом генератора опорного напряжения, а выход подключен к пятому входу блока регистрации и анализа, первая приемная антенна размещена над втулкой винта вертолета, вторая и третья приемные антенны размещены на фюзеляже и средней части корпуса вертолета соответственно, двигатель кинематически связан с винтом вертолета и генератором опорного напряжения.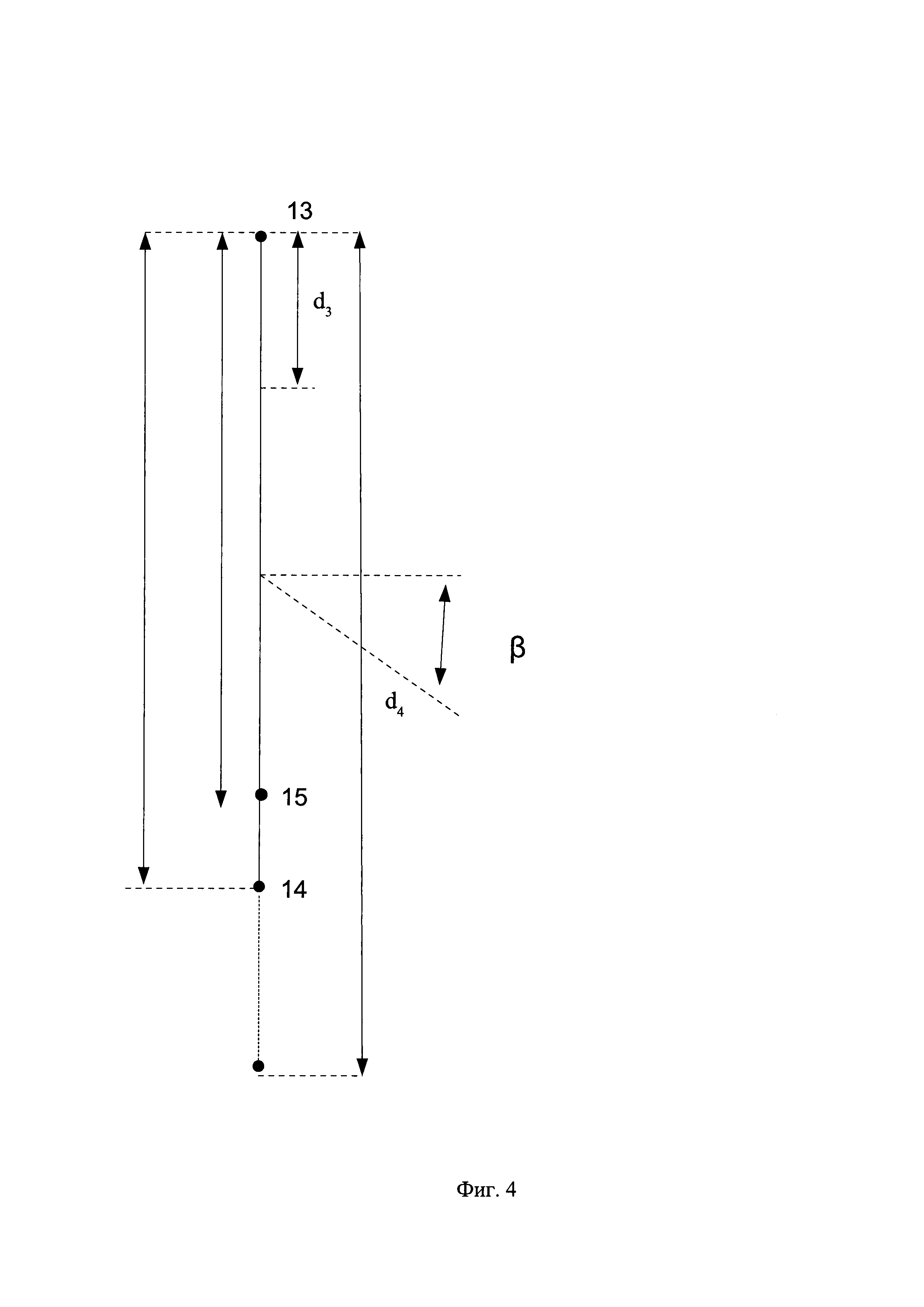
Индукционный датчик силы
Устройство для дистанционного измерения давления
Силоизмерительный датчик
Способ предварительной оценки качества диагностических тестов
Способ идентификации транспортных средств и выявления заявленных на поиск автомобилей при прохождении контрольных пунктов и устройство для его осуществления
Система защиты от несанкционированного доступа для транспортных средств
Способ дистанционного обнаружения вещества
Кодовая шкала
Способ контроля движения специальных транспортных средств
Способ обнаружения и идентификации разыскиваемых транспондеров из множества пассивных транспондеров и система для его осуществления
Устройство для дистанционного измерения давления
Система мониторинга безопасной эксплуатации зданий и инженерно-строительных сооружений
Трость для инвалида по зрению
Система дистанционного контроля и диагностики состояния конструкций и инженерно-строительных сооружений
Система контроля расхода и утечек бытового газа в многоквартирных домах
Экологическая система сбора информации о состоянии региона
Система охраны и наблюдения
Способ идентификации транспортных средств и выявления заявленных на поиск автомобилей при прохождении контрольных пунктов и устройство для его осуществления
Способ управления самолетом при заходе на посадку
Радиоприемное устройство для обнаружения широкополосных сигналов с фазовой манипуляцией

