Результат интеллектуальной деятельности: СПОСОБ ВЗАИМНОЙ ОРИЕНТАЦИИ СИСТЕМ КООРДИНАТ И ОПРЕДЕЛЕНИЯ ДАЛЬНОСТЕЙ ДО ОБЪЕКТОВ В ПАССИВНОЙ СИСТЕМЕ РАДИОВИДЕНИЯ
Вид РИД
Изобретение
Изобретение относится к пассивным системам радиовидения [1], работающим по принципу стереопары. Эффект стереопары [2] позволяет определять дальности до объектов наблюдения без применения активных средств измерения при наличии двух взаимно удаленных на базовое расстояние наблюдателей. Для расчета дальностей требуется знание взаимной ориентации двух систем координат - матрицы Р поворота осей координат и вектора параллельного переноса t (базового вектора) [2]. При этом базовый вектор t, как правило, известен, а углы α, β, γ, включенные с состав матрицы Р, требуется найти. Для взаимной ориентации двух систем координат необходимо иметь n пар (n≥1) сопряженных векторов направлений на объекты, формируемых в системах наблюдения за объектами.
Рассмотрим в качестве прототипа способ [2] нахождения углов α, β, γ, который заключается в следующем.
1. Устанавливается стереопара из двух взаимно удаленных на базовое расстояние |t| наблюдателей при известном базовом векторе t.
2. В системах координат наблюдателей формируются n пар сопряженных ортов а1(i) и а2(i) векторов направлений на i-e объекты,  где
где
n - количество наблюдаемых объектов, и назначается матрица Р поворота осей координат с углами поворота α, β, γ в ее составе.
3. Для n пар сопряженных ортов а1(i) и 
 представленных в системе координат первого наблюдателя с помощью матрицы Р, вычисляется показатель J правильности сопряжения в виде суммы модулей смешанных произведений
представленных в системе координат первого наблюдателя с помощью матрицы Р, вычисляется показатель J правильности сопряжения в виде суммы модулей смешанных произведений  трех векторов a1(i),
трех векторов a1(i),  и t:
и t:

При этом вычисление (a1(i), Pa2(i), t) осуществляется с помощью определителя, строками которого являются координаты данных векторов.
4. Численным методом подбора находятся углы α, β, γ, при которых показатель (1) принимает наименьшее значение, близкое к нулю.
Данный способ обладает следующим недостатком. Близкое к нулю значение показателя (1) является признаком компланарности трех векторов a1(i),  t и представляет необходимое условие сопряжения векторов a1(i) и
t и представляет необходимое условие сопряжения векторов a1(i) и  по принадлежности i-м объектам
по принадлежности i-м объектам  но не достаточное условие.
но не достаточное условие.
Предлагаемое техническое решение направлено на устранение этого недостатка, а именно на введение дополнительных операций проверки достаточности сопряжения i-x пар векторов a1(i) и 
 одновременно с определением дальностей до объектов.
одновременно с определением дальностей до объектов.
Технический результат предлагаемого технического решения достигается применением способа взаимной ориентации систем координат и определения дальностей до объектов в пассивной системе радиовидения, который заключается в установлении стереопары из двух взаимно удаленных на базовое расстояние |t| наблюдателей при известном базовом векторе t, формировании в системах координат наблюдателей n пар сопряженных ортов а1(i) и а2(i)
векторов направлений на i-e объекты,  где n - количество наблюдаемых объектов, нахождении матрицы Р поворота осей координат на углы α, β, γ численным методом подбора по критерию минимума показателя
где n - количество наблюдаемых объектов, нахождении матрицы Р поворота осей координат на углы α, β, γ численным методом подбора по критерию минимума показателя  где
где  - смешанное произведение трех векторов, отличающийся тем, что с помощью найденной матрицы Р и известного вектора t вычисляются оценки дальностей r1(i) и
- смешанное произведение трех векторов, отличающийся тем, что с помощью найденной матрицы Р и известного вектора t вычисляются оценки дальностей r1(i) и  до i-x объектов по формуле (Т - символ транспонирования):
до i-x объектов по формуле (Т - символ транспонирования):

которые обеспечивают минимум показателя

где  - норма вектора, после чего показатель I сравнивается с малым числом ε>0, и если I≤ε, то матрица Р принимается в качестве матрицы поворота, а на основе найденных дальностей вычисляются пространственные координаты объектов М1(i)=r1(i)a1(i) и M2(i)=r2(i)a2(i),
- норма вектора, после чего показатель I сравнивается с малым числом ε>0, и если I≤ε, то матрица Р принимается в качестве матрицы поворота, а на основе найденных дальностей вычисляются пространственные координаты объектов М1(i)=r1(i)a1(i) и M2(i)=r2(i)a2(i),  в системах координат наблюдателей.
в системах координат наблюдателей.
Алгоритмически способ заключается в следующем.
1. Устанавливается стереопара из двух взаимно удаленных на базовое расстояние ⏐t⏐ наблюдателей при известном базовом векторе t.
2. В системах координат наблюдателей формируются n пар сопряженных ортов a1(i) и a2(i) векторов направлений на i-e объекты,  где
где
n - количество наблюдаемых объектов, и назначается матрица Р поворота осей координат заданием в ее составе углов поворота α, β, γ.
3. Для n пар сопряженных ортов a1(i) и 
 представленных в системе координат первого наблюдателя, вычисляется показатель (1) правильности сопряжения векторов J в виде суммы модулей смешанных произведений (a1(i),Pa2(i),t) троек векторов a1(i),
представленных в системе координат первого наблюдателя, вычисляется показатель (1) правильности сопряжения векторов J в виде суммы модулей смешанных произведений (a1(i),Pa2(i),t) троек векторов a1(i),  и t.
и t.
4. Численным методом подбора находятся углы α, β, γ в составе матрицы Р по критерию минимума показателя (1).
5. С помощью найденной матрицы Р и известного вектора t вычисляются оценки дальностей r1(i) и r2(i),  до i-х объектов по формуле (2), для которых показатель (3) принимает наименьшее значение.
до i-х объектов по формуле (2), для которых показатель (3) принимает наименьшее значение.
6. Наименьшее значение показателя I сравнивается с заданным порогом ε. Если I<ε, то матрица Р принимается в качестве матрицы поворота, а на основе найденных оценок дальностей вычисляются пространственные координаты центров объектов М1(i)=r1(i)a1(i) и M2(i)=r2(i)a2(i),  в системах координат наблюдателей.
в системах координат наблюдателей.
Пояснительная часть Показатель (1) представляет необходимое условие сопряжения векторов a1(i) и a2(i),  То есть, если векторы a1(i) и a2(i), образуют n сопряженных пар, то отсюда следует, что тройки векторов a1(i), a2(i), t, компланарны и их смешанные произведения равны нулю с точностью до ошибок измерения координат векторов. Соответственно показатель (1) не превышает малого числа ε>0: J≤ε. Как следствие, если J>ε, то векторы не образуют сопряженные пары.
То есть, если векторы a1(i) и a2(i), образуют n сопряженных пар, то отсюда следует, что тройки векторов a1(i), a2(i), t, компланарны и их смешанные произведения равны нулю с точностью до ошибок измерения координат векторов. Соответственно показатель (1) не превышает малого числа ε>0: J≤ε. Как следствие, если J>ε, то векторы не образуют сопряженные пары.
Однако условие компланарности не является достаточным для сопряжения при n>1, так как возможны случаи, когда для компланарных троек а1(i), а2(i), t векторы а1(i) и а2(i) не направлены на один и тот же объект. Поэтому дополнительно вводится достаточное условие сопряжения в виде показателя (3). Для сопряженных пар векторов r1(i)a1(i) и r2(i)Pa2(i), рассматриваемых в системе координат первого наблюдателя, тройки векторов r1(i)a1(i), r2(i)Pa2(i) и t замыкаются по правилу треугольника (с точностью до вектора ошибок), что дает значение показателя (3), близкое к нулю. Поэтому в случае выполнения неравенства I≤ε, где ε - малое положительное число, окончательно принимается решение о правильности сопряжения пар векторов и найденных оценок дальностей. Оценки дальностей (2) находятся по критерию минимума показателя (3) методом наименьших квадратов.
Результаты моделирования Разрабатывалась компьютерная программа моделирования работы алгоритма, основанного на предложенном способе. При наблюдении n объектов задавались углы взаимной ориентация систем координат наблюдателей. Поиск данных углов в составе матрицы Р осуществлялся численным методом Гаусса-Зейделя пошаговой минимизацией показателя (1). Начальные значения углов при поиске задавались случайным образом в окрестности заданных углов. С помощью найденной матрицы Р вычислялись дальности до объектов и пространственные координаты их центров. На множестве реализаций случайных величин определялись следующие характеристики: среднее расстояние dcp между моделируемыми и найденными на основе оценок дальностей центрами объектов; среднее значение Icp показателя (3) достаточного условия сопряжения. В таблице представлены dcp и Iср в зависимости от числа объектов n. Среднее значение Jср показателя (1) необходимого условия сопряжения получалось близким к нулю.
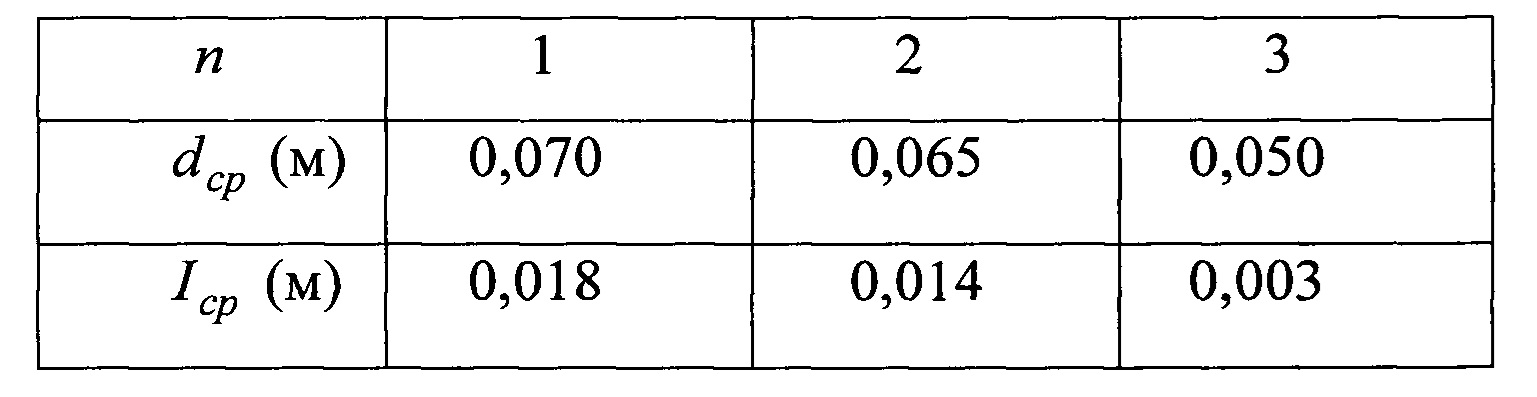
По результатам моделирования (таблица) можно отметить уменьшение средней ошибки dcp определения центров объектов и соответственно уменьшение показателя Iср с увеличением числа объектов n.
Предложенный способ может найти применение в существующих пассивных системах радиовидения, развертываемых на местности для наблюдения за объектами и определения их пространственных координат.
Литература
1. Пассивная радиолокация: методы обнаружения объектов / Под ред. Р.П. Быстрова и А.В. Соколова. М.: Радиотехника, 2008. 320 с.
2. Цифровая обработка изображений в информационных системах: учеб. пособие / И.С. Грузман, B.C. Киричук и др. Новосибирск: Изд-во НГТУ, 2002. 352 с.


Способ уменьшения девиации частоты волноводного уровнемера с лчм сигналом
Способ нахождения сопряженных векторов направлений на движущиеся объекты
Навигационная комбинированная оптическая система
Мультивекторная матричная ракетная двигательная система с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов
Способ определения пространственного положения, скорости и ускорения объекта в пассивной сканирующей системе видения
Способ экспериментальной оценки вероятности безотказной работы объекта
Способ повышения эффективности очистки кремния
Способ двухэтапного восстановления радиотепловых изображений
Способ очистки металлургического кремния от углерода
Мультивекторная матричная ракетная двигательная система с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов
Способ наблюдения за движущимися объектами многопозиционной системой приемников

