Результат интеллектуальной деятельности: СПОСОБ УМЕНЬШЕНИЯ ДЕВИАЦИИ ЧАСТОТЫ ВОЛНОВОДНОГО УРОВНЕМЕРА С ЛЧМ СИГНАЛОМ
Вид РИД
Изобретение
Изобретение относится к области промышленных уровнемеров, использующих локационный принцип измерения расстояния до контролируемой среды на основе частотно-модулируемого по симметричному треугольному закону сигнала. По необходимости волноводный уровнемер работает только с жидкими средами.
Локационный принцип измерения расстояния основывается на однозначной связи между скоростью распространения сигнала и временем распространения до контролируемого объекта. При ЛЧМ сигнале эта связь преобразуется в разностную частоту между излученным и отраженным сигналами - сигнал разностной частоты (СРЧ). Если измерение происходит в свободном пространстве связь между измеряемым расстоянием R и разностной частотой линейна. В волноводном уровнемере из-за зависимости скорости распространения электромагнитной волны от частоты ƒ (волноводная дисперсия) эта зависимость нелинейна, что вызывает необходимость противодействовать дисперсии, чтобы уменьшить ошибку измерения [1]. С учетом поставленной задачи снижения девиации частоты излучаемого сигнала при сохранении точности измерения R, введем, наряду с физически реализуемым в волноводе сигналом, виртуальный сигнал, скорость распространения которого  где с - скорость света в вакууме, ƒкр - критическая частота волновода. В реальности такой сигнал существует только как математический объект.
где с - скорость света в вакууме, ƒкр - критическая частота волновода. В реальности такой сигнал существует только как математический объект.
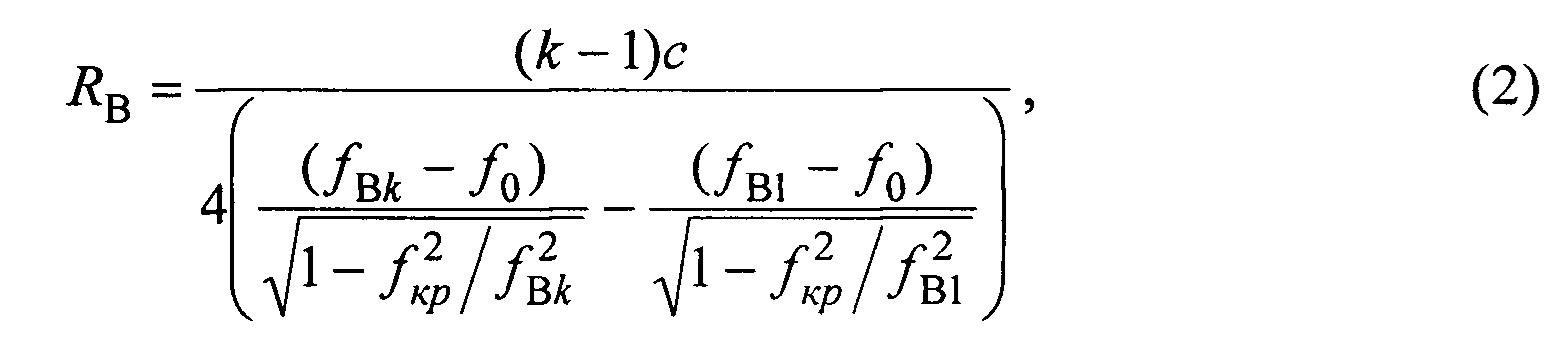
Расчет расстояния R до контролируемой среды для реального сигнала производится в соответствии с [2]:

где n - число нулей СРЧ на полупериоде модуляции, ƒn, ƒ1 - частоты, соответствующие n-му и первому нулям СРЧ, ƒ0 - начальная несущая частота.
Соотношение (1) свободно от дисперсии, а изобретение [2] является прототипом.
Рассмотрим выражение, аналогичное (1), для виртуального сигнала.
Частота разностного сигнала определяется по формуле:
где ΔF - девиация частоты,  - период модуляции, а
- период модуляции, а

- время задержки виртуального сигнала.
Величина τЗВ определяется в (2) при известном значении R, которое может быть найдено только из реального (физически реализуемого) сигнала.
Фаза сигнала СРЧ
ϕ=ϕСРЧτЗВt, 0≤t≤.
Обозначим через tj моменты времени, в которых СРЧ обращается в ноль, т.е. 

где k - максимальное число нулей СРЧ виртуального сигнала, α - случайная фаза.
Ввиду линейности модуляционной характеристики (восходящая ветвь)

где ƒj - текущая частота.
С учетом (2) и (4) из (3) получаем

Последовательно полагая в (5) j=k, j=1 и вычитая полученные результаты, находим
где ƒВk, ƒВ1 - частоты, соответствующие k-му и первому нулям СРЧ виртуального сигнала.
Расчеты измеряемого расстояния R в соответствии с (1) и (6) проводились по следующим моделям СРЧ:
- для реального сигнала

где U0 - амплитуда, которая определяется приемным трактом измерителя, n(t) - аддитивный белый гауссовский шум;
- для виртуального сигнала

где U0B - амплитуда, не имеющая шумовой составляющей, β - произвольная фаза.
При расчете СРЧ в соответствии с (7), (8) принимались следующие дискретные значения параметров: 
 Расчеты проводились методом статистических испытаний при следующих параметрах зондирующего сигнала: число отсчетов СРЧ на интервале анализа
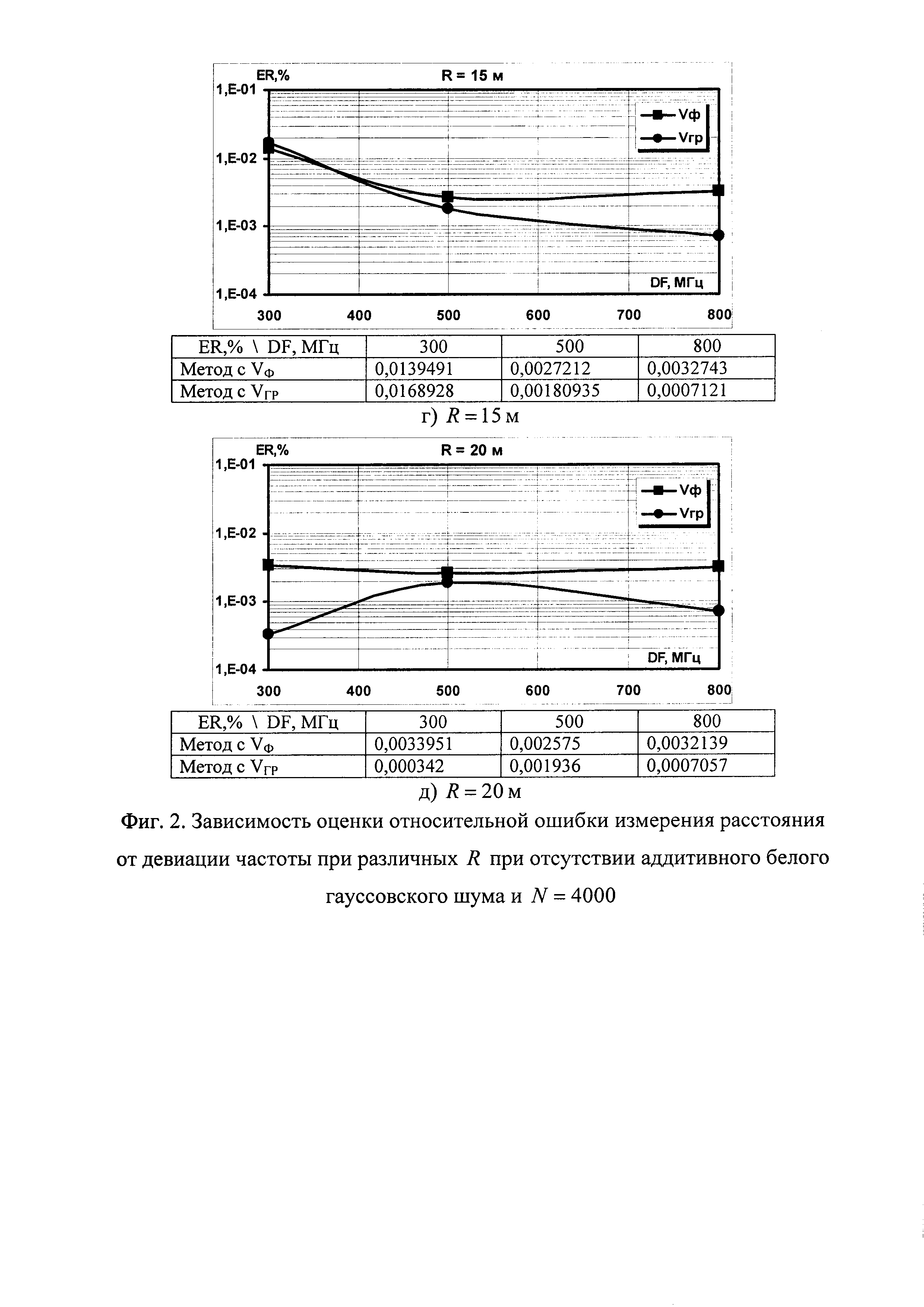
Расчеты проводились методом статистических испытаний при следующих параметрах зондирующего сигнала: число отсчетов СРЧ на интервале анализа  N=2000; 4000, =16 мс, несущая частота ƒ0=7900 МГц, критическая частота ƒкр=7032 МГц, девиация частоты ΔF=300; 500; 800 МГц, случайные фазы варьировались в пределах [0÷π), усреднение в точках осуществлялось по 106 значениям.
N=2000; 4000, =16 мс, несущая частота ƒ0=7900 МГц, критическая частота ƒкр=7032 МГц, девиация частоты ΔF=300; 500; 800 МГц, случайные фазы варьировались в пределах [0÷π), усреднение в точках осуществлялось по 106 значениям.
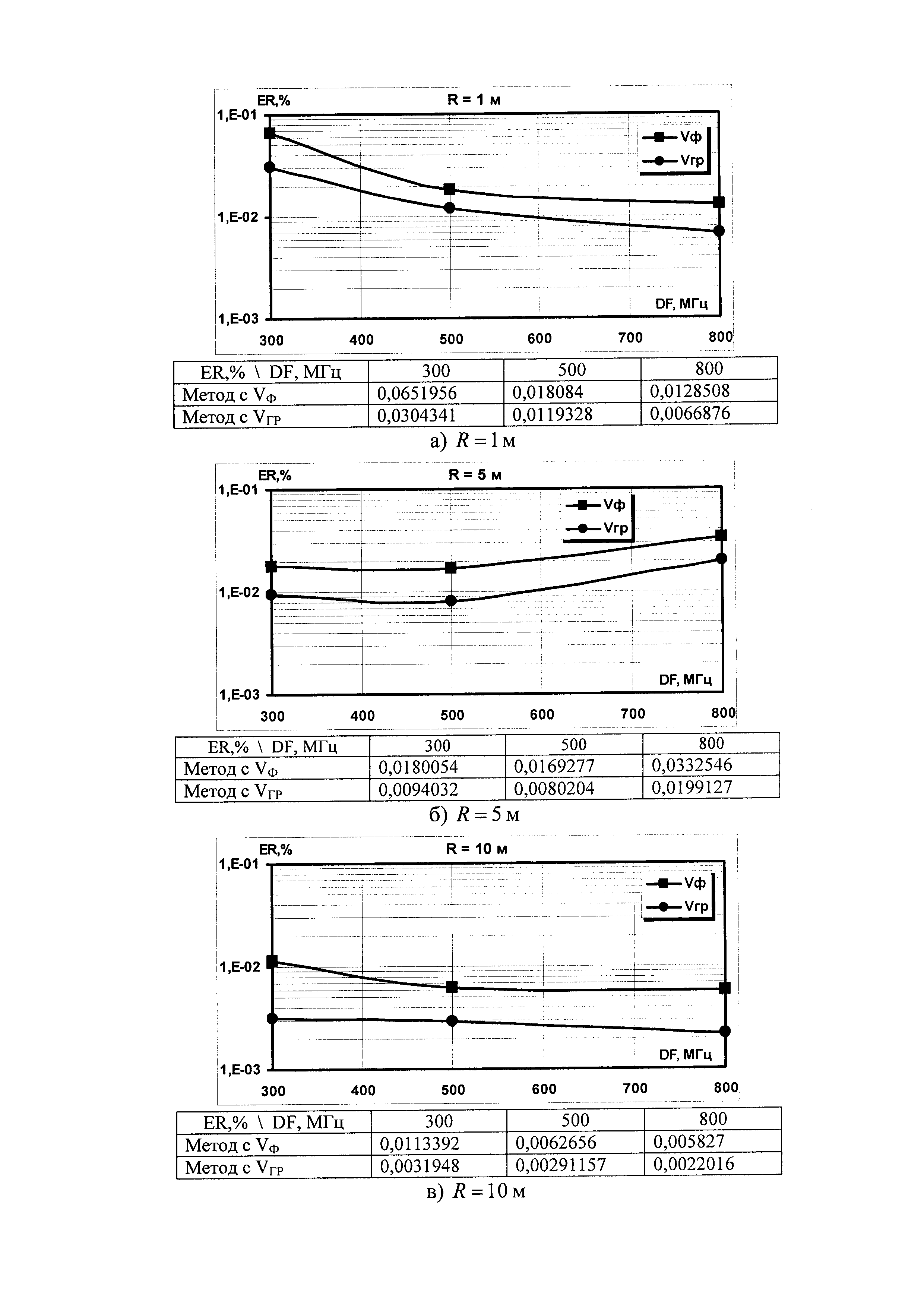
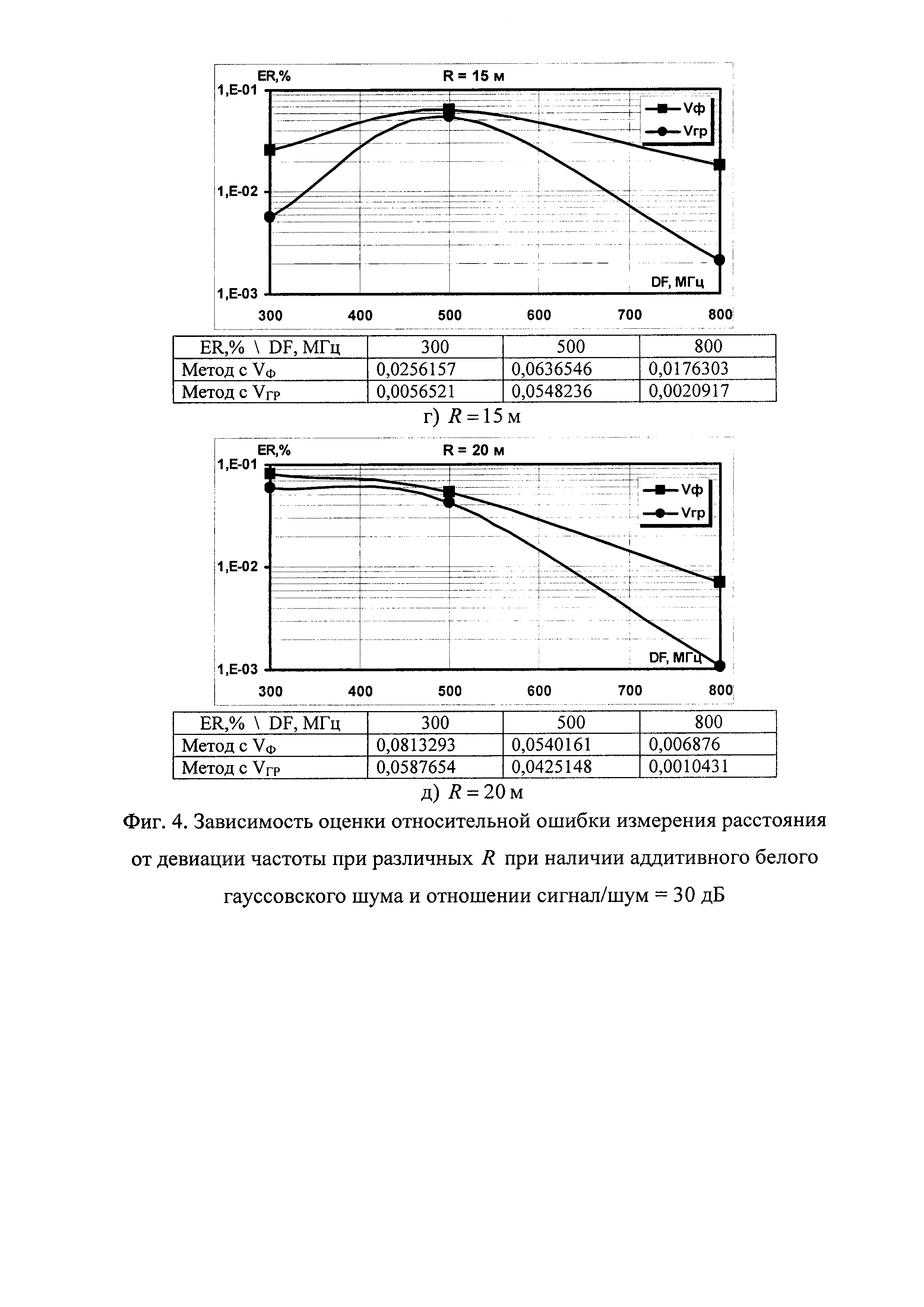
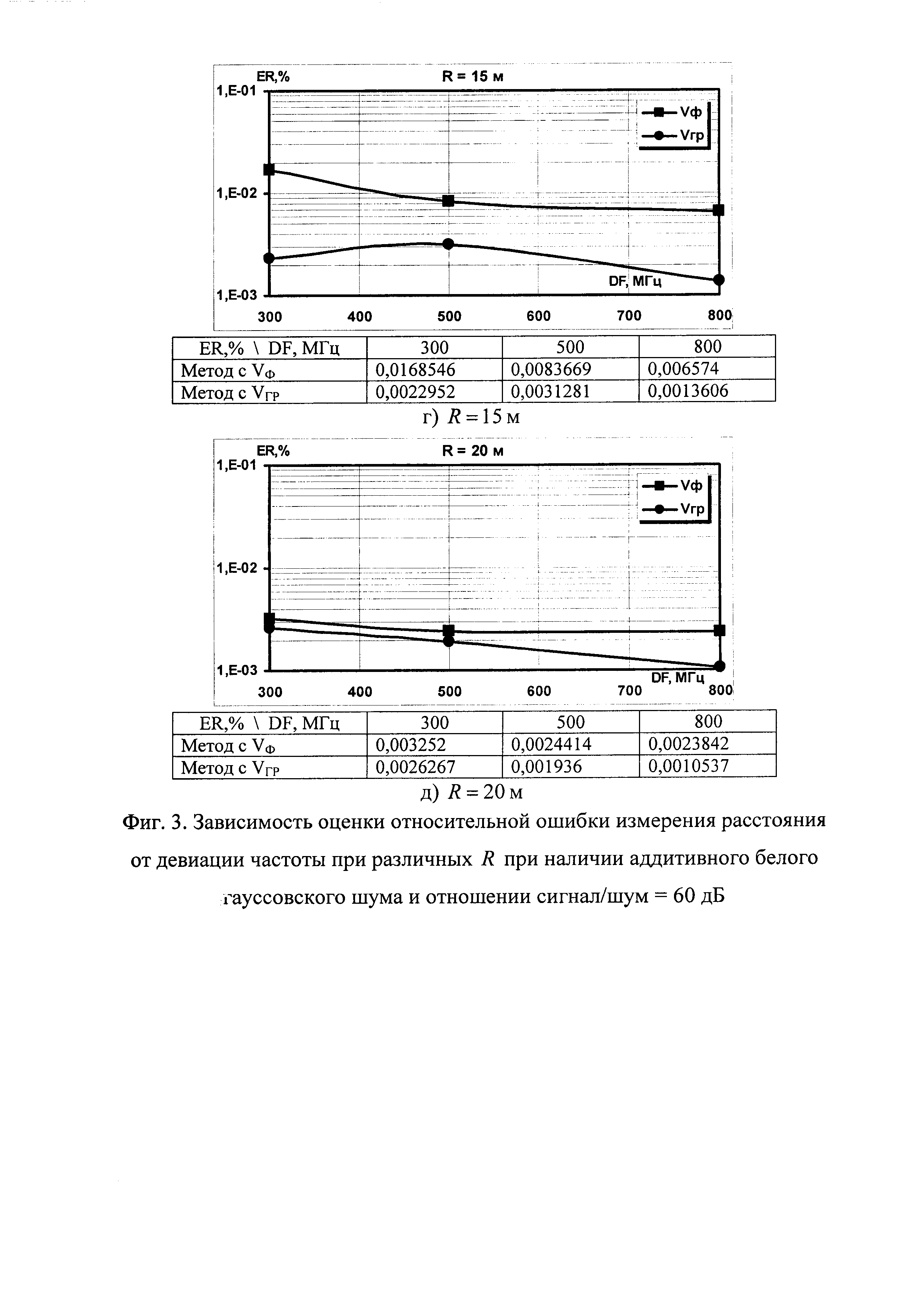
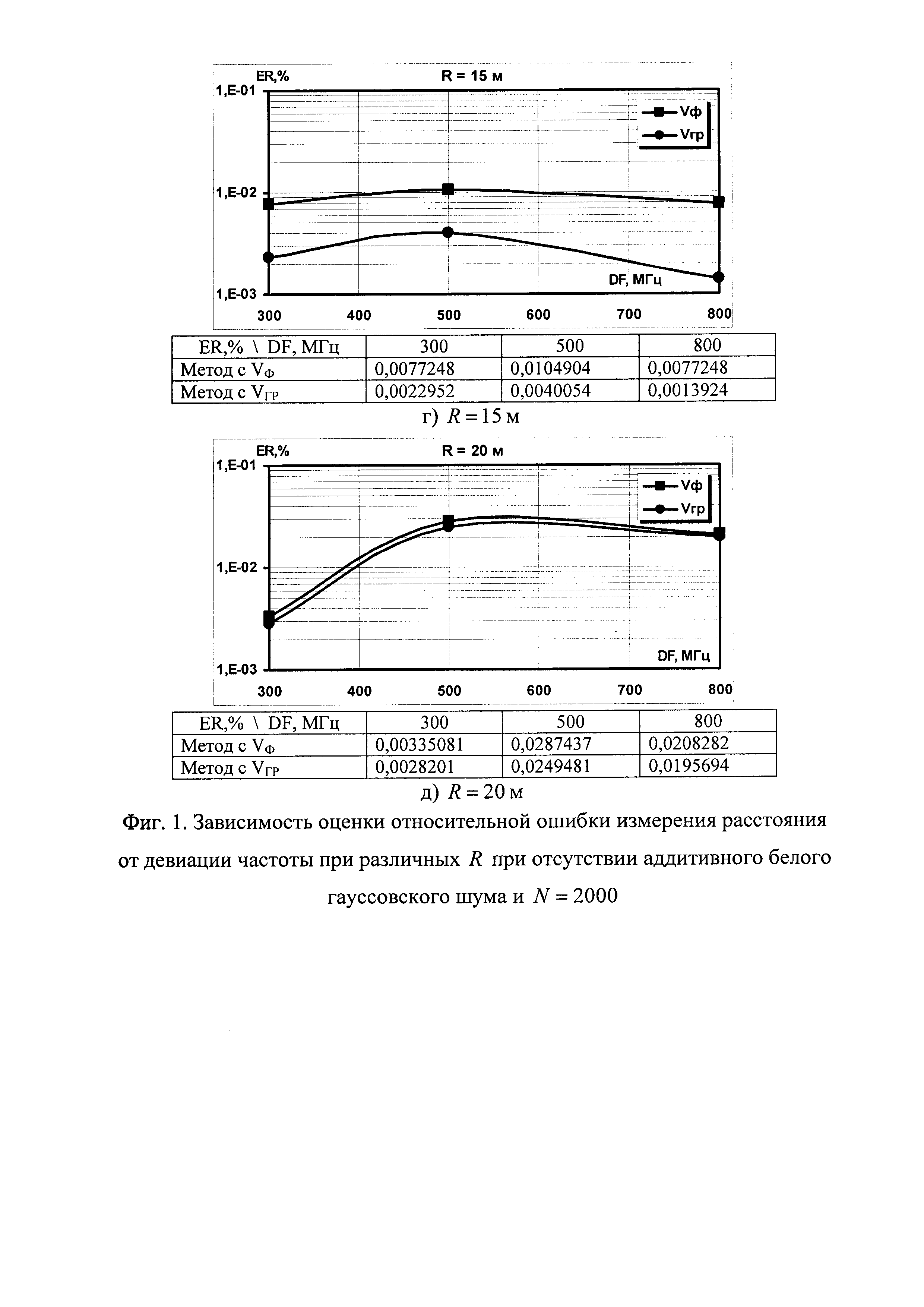
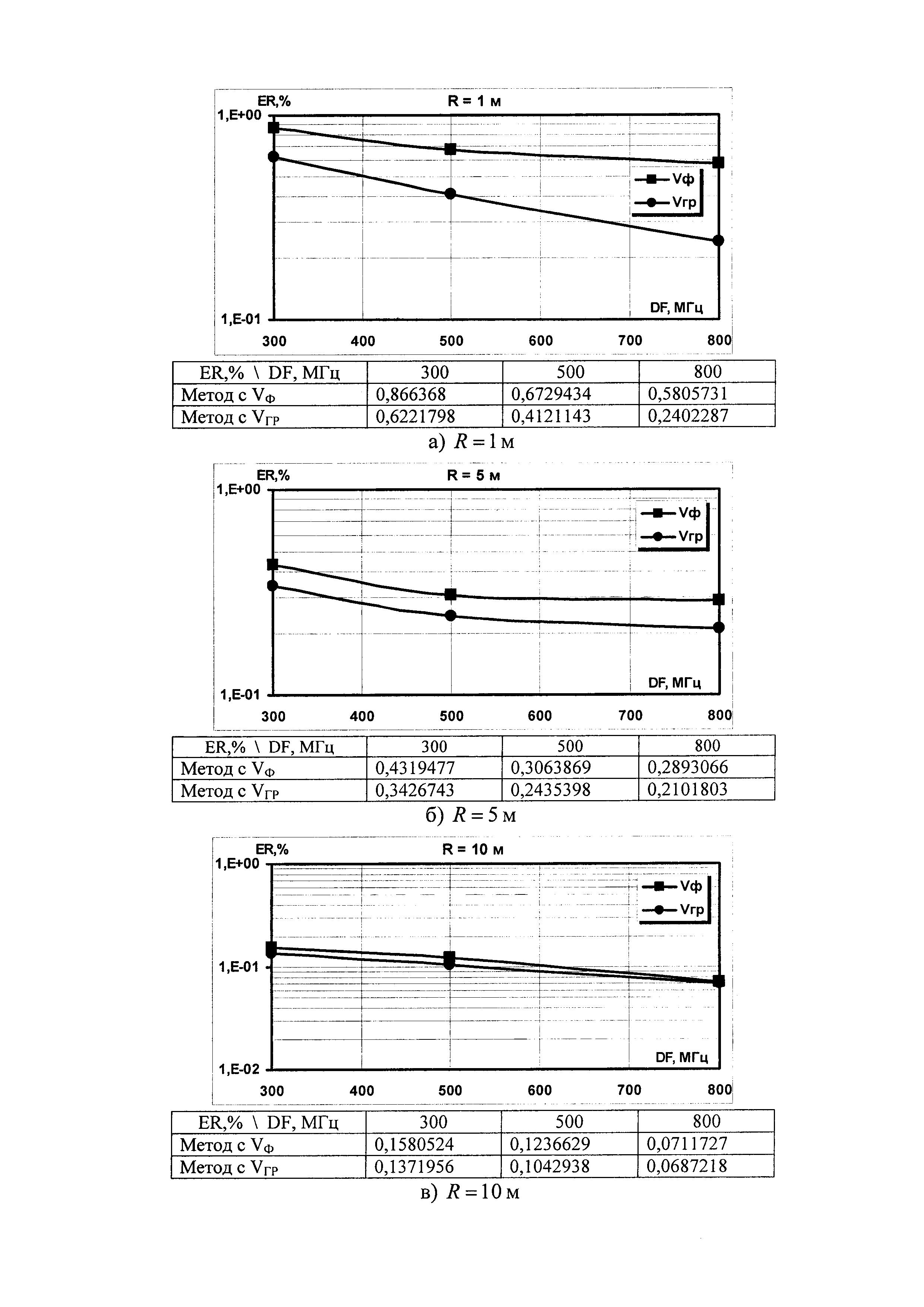
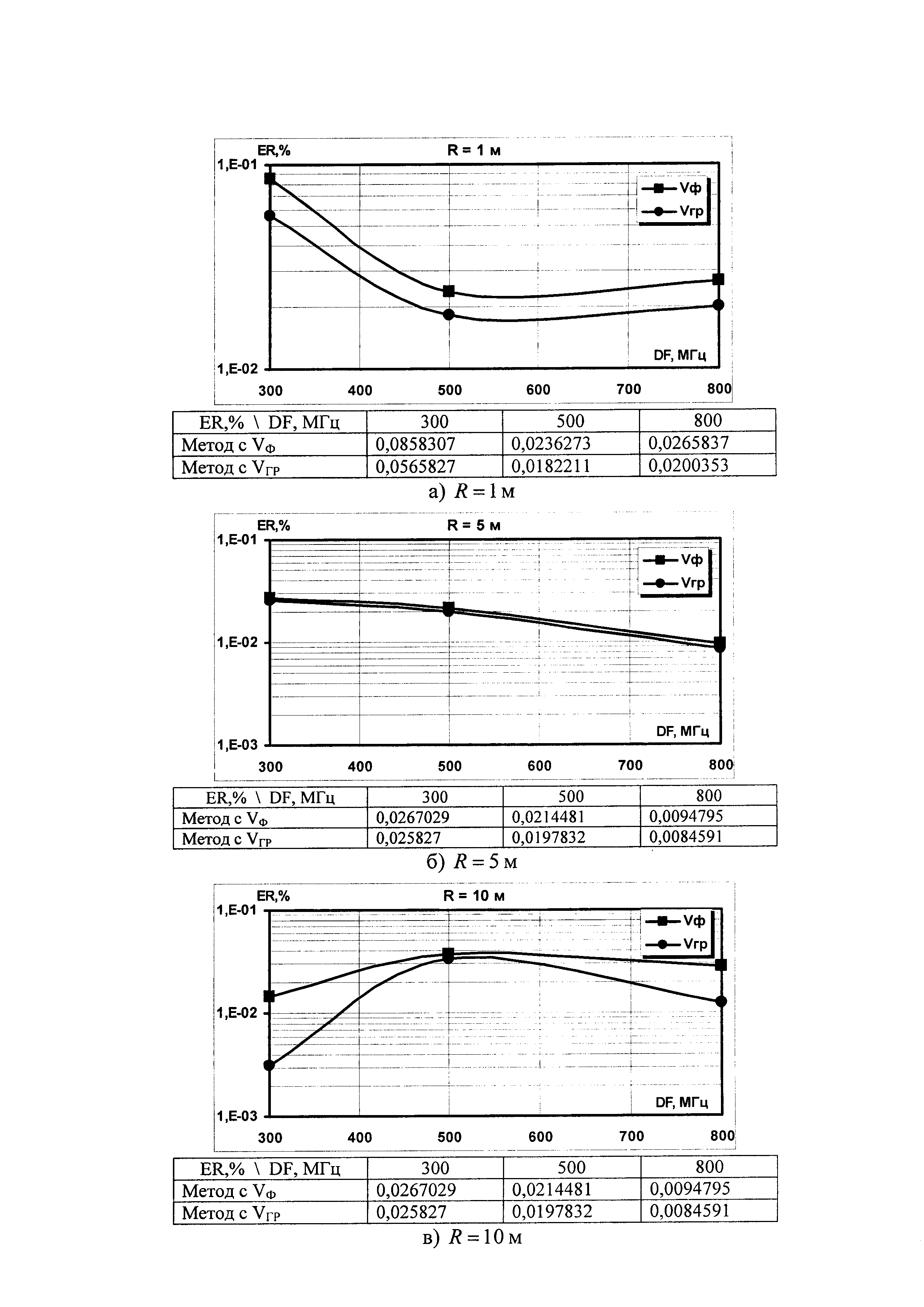
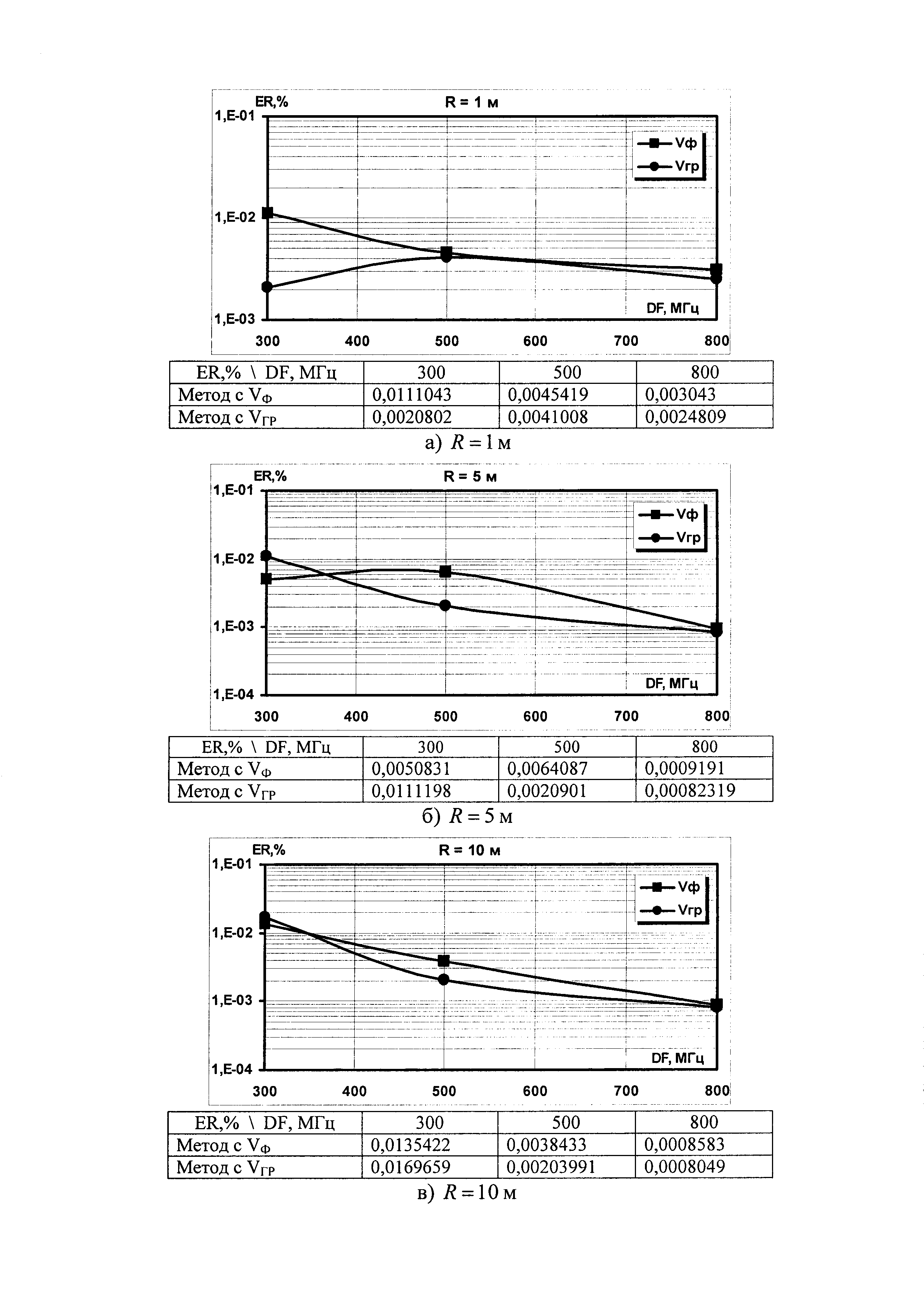
Результаты расчетов представлены на Фиг. 1-Фиг. 4. На этих зависимостях по оси ординат откладываются относительные ошибки измерения расстояния  где
где  - измеренное расстояние, рассчитываемое по реальному сигналу, распространяющемуся со скоростью νф, и
- измеренное расстояние, рассчитываемое по реальному сигналу, распространяющемуся со скоростью νф, и  где
где  - уточненная оценка измеряемого расстояния R, рассчитываемая на основе
- уточненная оценка измеряемого расстояния R, рассчитываемая на основе по виртуальному сигналу, распространяющемуся со скоростью νгр.
по виртуальному сигналу, распространяющемуся со скоростью νгр.
Результаты расчетов при отсутствии шума (Фиг. 1 и Фиг. 2) свидетельствуют о меньшей ошибке при виртуальном сигнале (νгр), чем при реальном (νф) практически во всех точках расчета R для различных N.
При наличии шума (Фиг. 3 и Фиг. 4) наблюдается устойчивое преимущество виртуального сигнала (νгр) для рассмотренных отношений сигнал/шум в зависимости от ΔF для различных R.
Таким образом, предложенный способ может обеспечить уменьшение девиации частоты ΔF на величину (300÷500) МГц при сохранении требуемого уровня ошибки ER.
Предлагаемый способ уменьшения девиации частоты без изменения точности измерения расстояния до контролируемой среды не известен для способов и устройств, из чего следует соответствие его критерию «новизна».
Изобретательский уровень предлагаемого способа определяется преимуществами построения уровнемера по предлагаемой схеме - упрощается построение передающего и приемного трактов измерителя, а следовательно, их стоимость. Уменьшение девиации частоты также обеспечивает при сохранении требуемого уровня точности возможность более тщательно согласовать антенно-волноводный тракт, уменьшая мешающие отражения.
На основании сказанного можно утверждать, что заявляемый способ отвечает критерию «изобретательский уровень».
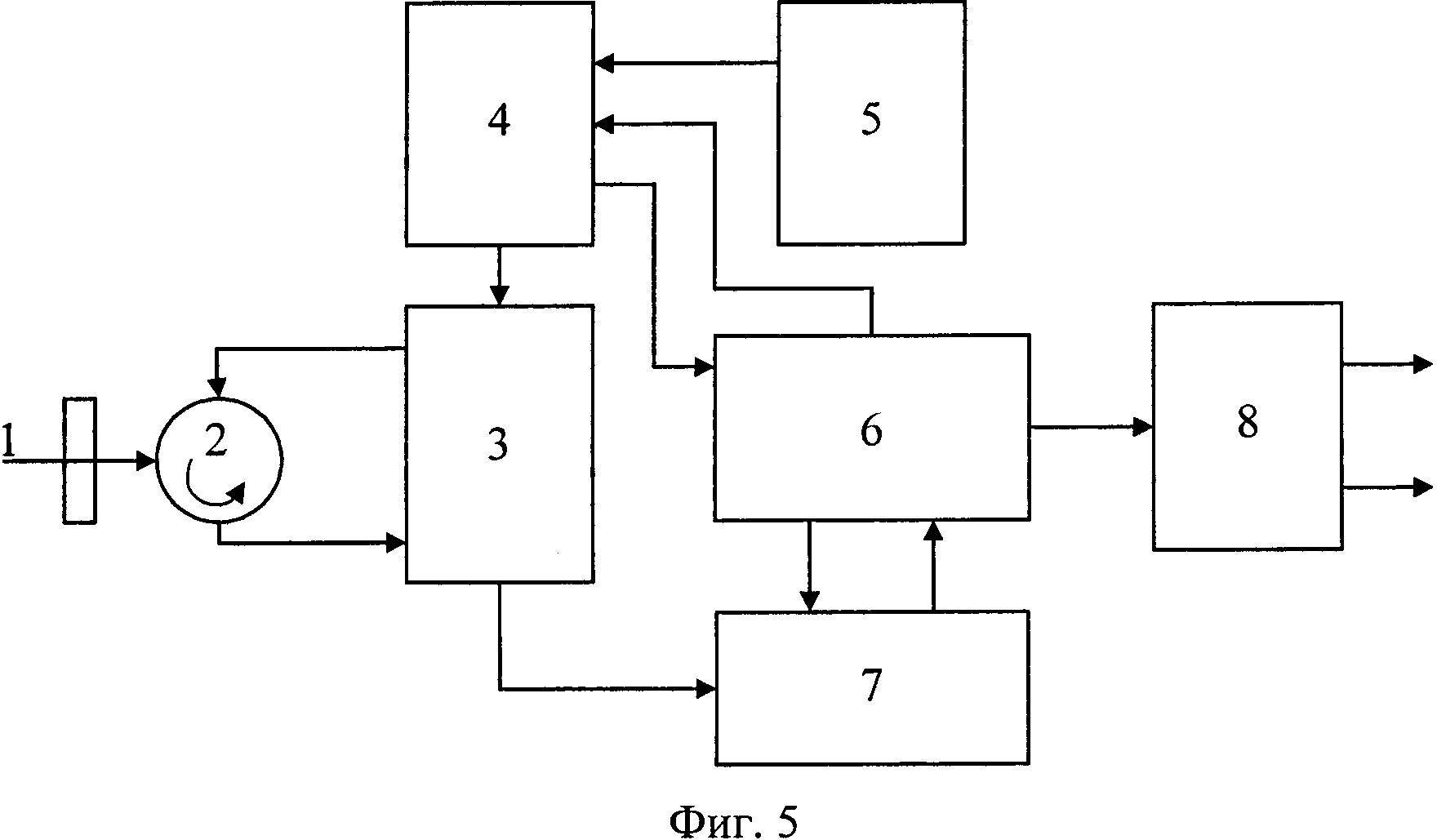
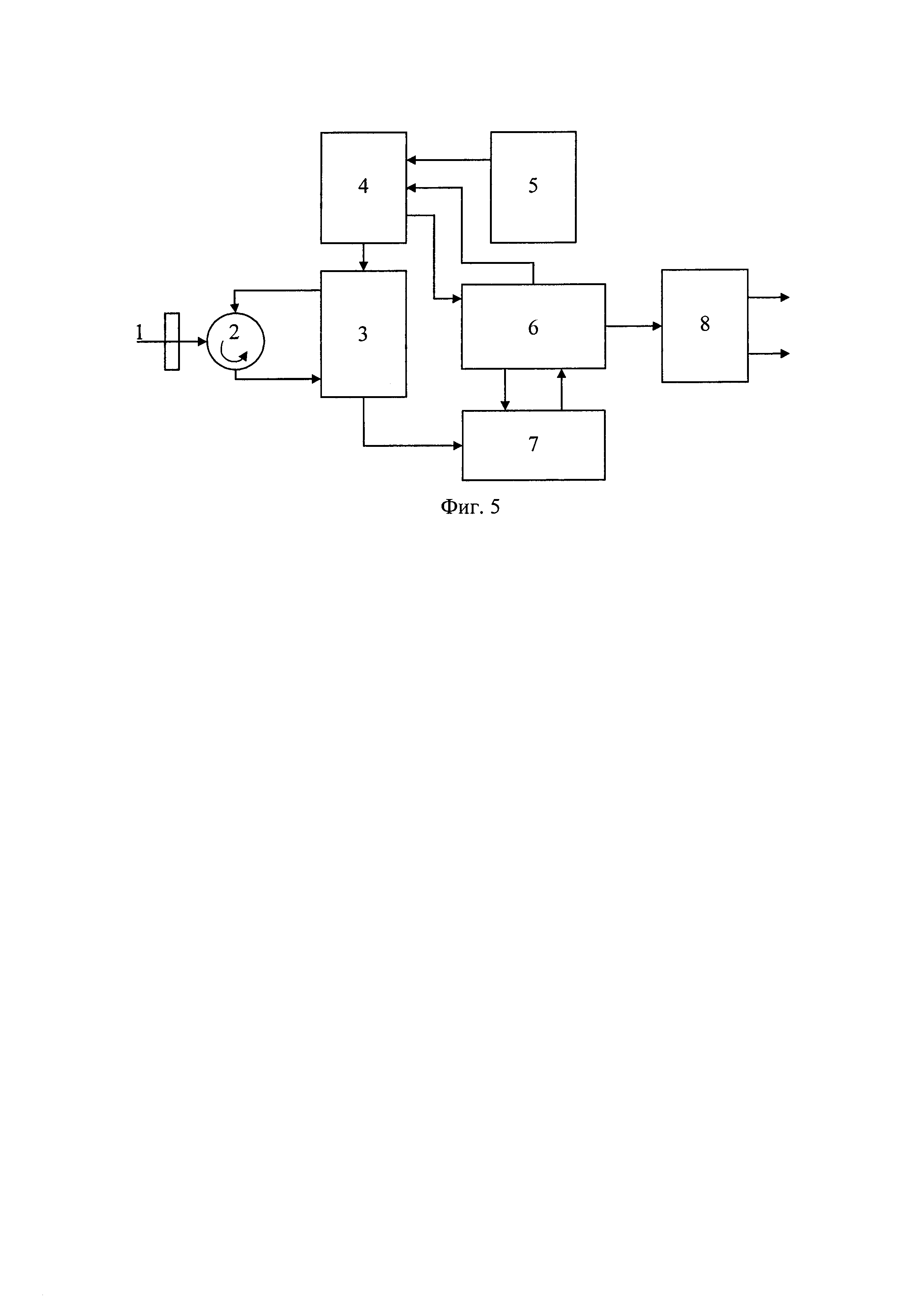
Возможная структурная схема реализации предполагаемого способа приведена на Фиг. 5. Обозначенные блоки выполняют следующие функции: 1 - волновод; 2 - циркулятор; 3 - приемо-передающий СВЧ модуль; 4 - цифровой синтезатор частот; 5 - задающий генератор; 6 - микропроцессор; 7 - блок аналоговой обработки СРЧ (усиление, фильтрация, ограничение); 8 - блок выходной.
Библиографические данные
1. Б.А. Атаянц, В.М. Давыдочкин, В.В. Езерский. Точность измерения уровня волноводным частотно-модулированным уровнемером. // Радиотехника. 2015. №5, С. 73-78.
2. Бакулин А.И., Смирнов А.А. Способ измерения расстояния до контролируемой среды с помощью волноводного ЛЧМ локатора. Заявка на ИЗ №2017123428. Получено решение о выдаче патента 27.03.2018 г.
Способ восстановления изображений в двухканальной сканирующей системе
Способ формирования изображений объектов в двухканальной радиометрической системе
Ионный источник для электростатического ракетного двигателя
Способ увеличения скорости электрического ветра и устройство для его осуществления
Автокомпенсатор доплеровских сдвигов фазы помех
Способ обработки последовательности изображений для автоматического обнаружения танкера и оценивания его траекторных параметров при дозаправке в воздухе на фоне звездного неба
Способ определения знака разности частот и устройство для его реализации
Способ формирования периодических двуполярных колебаний с заданным фазовым сдвигом и устройство для его реализации
Позиционно-чувствительный датчик для измерения амплитудно-временных параметров и профиля импульсного электронного пучка
Вычислитель для компенсации помех
Способ изготовления лыжной мази
Устройство для обработки озоном сыпучих материалов
Способ извлечения редкоземельных элементов из экстракционной фосфорной кислоты
Способ извлечения редкоземельных элементов из экстракционной фосфорной кислоты
Способ измерения расстояния от излучателя до контролируемого объекта на основе чм локатора
Аппарат для проведения массообменных и химических процессов
Способ получения растворимых бесхлорных калийных удобрений (варианты)
Способ оптимизации метрологии оптического излучения и устройство для его реализации - универсальный фотометр-эксергометр
Способ получения растворимых бесхлорных калийных удобрений (варианты)
Способ измерения расстояния до контролируемой среды с помощью волноводного лчм локатора

