Результат интеллектуальной деятельности: ОРИЕНТАЦИЯ И ОТСЛЕЖИВАНИЕ ПОЛОЖЕНИЯ ИНСТРУМЕНТА ОТНОСИТЕЛЬНО ПЛОСКОСТИ УЛЬТРАЗВУКОВОГО ИЗОБРАЖЕНИЯ
Вид РИД
Изобретение
Настоящее изобретение в целом относится к трехмерной ("3D") ориентации и отслеживанию относительного положения интервенционного инструмента (например, иглы, катетера, и т.д.) относительно плоскости акустического изображения, создаваемого устройством акустической визуализации (например, двумерным ("2D") ультразвуковым визуализирующим зондом, имеющим одномерную ("1D") решетку преобразователей). В частности, настоящее изобретение относится к акустическим датчикам, пространственно ориентированным относительно интервенционного инструмента (например, прикрепленным к дистальному концу, или внедренному в дистальный конец иглы или катетера) для облегчения относительной ориентации и отслеживания положения интервенционного инструмента относительно плоскости акустического изображения.
Двумерный (2D) ультразвуковой зонд, имеющий 1D решетку преобразователей, обычно используется для визуализации целевой анатомической плоскости в широком диапазоне клинических вмешательств. Однако, проблема заключается в том, чтобы оценить положение интервенционного инструмента (например, иглы, катетера, и т.д.) вне акустической визуализации целевой анатомической плоскости, создаваемой 2D ультразвуковым зондом. Следовательно, клиницист может затрачивать много усилий и времени, пытаясь точно установить интервенционный инструмент внутри акустического изображения целевой анатомической плоскости, в частности, дистальный конец интервенционного инструмента. Конкретнее, для вмешательств, предполагающих наклонную/ортогональную инжекцию интервенционного инструмента в целевую анатомическую плоскость, оказывается затруднительным установить точное время и положение входа интервенционного инструмента внутрь акустического изображения целевой анатомической плоскости.
Например, вставка иглы при одновременном действии ультразвука обычно выполняется для различных вмешательств (например, биопсий, жидкостного дренирования, блокаде нерва, сосудистого доступа, и т.д.). Хотя осуществлялись методики визуализации иглы, основанные на управляемых отображающих пучках, приблизительно перпендикулярных оси иглы, в существенном числе случаев игла отклоняется от плоскости акустического изображения вследствие неоднородности ткани и/или вследствие асимметрии заострения. По существу, игла вне плоскости исчезает из плоскости акустического изображения независимо от ухищрений развитого программного обеспечения при визуализации иглы. Клиницист должен при этом перемещать плоскость акустического изображения для повторного получения изображения иглы, но в результате теряет акустическое изображение целевой анатомической плоскости. Кроме того, клиницист не знает, где находится игла относительно плоскости акустического изображения, и поэтому клиницист не имеет информации о том, как переместить 2D ультразвуковой зонд, чтобы найти иглу.
По существу, для акустической визуализации обязательный рабочий принцип заключается в поддержании отображения целевой анатомической плоскости и, в то же самое время, в знании относительного положения иглы относительно целевой анатомической плоскости. Однако, одна из главных технических трудностей при акустической визуализации заключается в правильной ориентации иглы и плоскости ультразвуковой визуализации для случая одной плоскости, и в визуализации конца иглы как противоположной оси для случая нормали к плоскости. Малые перемещения зонда и иглы приводят к разориентации иглы и плоскости изображения, что, в свою очередь, может привести к плохой визуализации иглы, срывам, напряжению, потери времени, многократным проколам иглой, приводящим к дискомфорту пациента и, возможно, к плохим процедурным результатам (например, ложно-отрицательным при биопсиях, неудачным блокадам при местной анестезии или устранении боли, и повреждению сосуда и нерва).
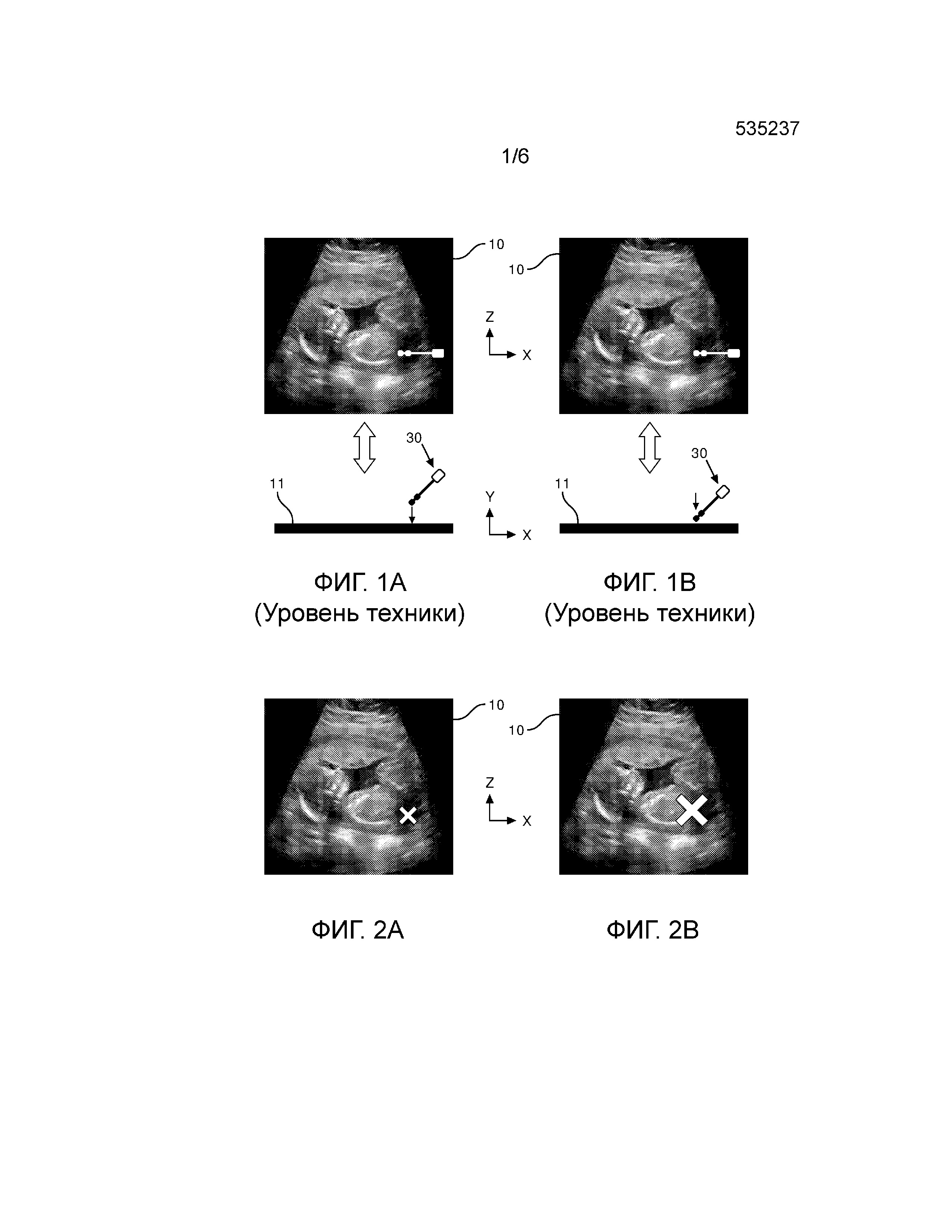
Например, на Фиг.1A и 1B показано малое Y перемещение иглы 30 к плоскости 11 акустического изображения. Это малое Y перемещение может привести к Y разориентации иглы 30 и плоскости 11 акустического изображения, как показано белым графическим значком, идентичному показанному на ультразвуковом изображении 10. Кроме того, иглы часто плохо визуализируются ультразвуковым методом, поскольку они представляют собой зеркальные отражатели, которые отражают звук в сторону от визуализирующего зонда с углом отражения, зависящим от угла вставки иглы относительно плоскости визуализации. Тем не менее, имеется значение при отображении конца иглы и ожидаемая траектория, когда игла находится в плоскости и невидима, или вне плоскости.
Настоящее изобретение придерживается рабочего принципа акустической визуализации, облегчая отслеживание и визуализацию интервенционного инструмента посредством накладки графического значка (например, маркера), указывающего интервенционный инструмент на ультразвуковом изображении. Один или несколько признаков/аспектов графического значка (например, размер, цвет, форма, и т.д.) модулируется как функция расстояния интервенционного инструмента (например, конец интервенционного инструмента) до плоскости ультразвуковой визуализации. Например, как показано на Фиг.2A и 2B, размер графического значка, показанного как белый X маркер, лежащий на ультразвуковом изображении 10, увеличивается, когда интервенционный инструмент перемещается в направлении Y плоскости 11 акустического изображения, как показано на Фиг.1A и 1B. Это существенно помогает врачу ориентировать интервенционный инструмент с визуализирующим зондом, что приводит к хорошей достоверности, быстрым процедурам и хорошим результатам, в частности, даже когда интервенционный инструмент невидим для обычного отображения (то есть, вне плоскости).
Одна из форм настоящего изобретения - это система навигации инструмента, использующая ультразвуковой зонд, ультразвуковой сканер, интервенционный инструмент (например, иглу или катетер), множество ультразвуковых преобразователей, средство отслеживания инструмента и навигатор изображения. При работе, ультразвуковой зонд создает плоскость акустического изображения для сканирования анатомической области, и ультразвуковой сканер создает ультразвуковое изображение анатомической области из скана анатомической области. Во время сканирования, интервенционный инструмент перемещается в анатомической области относительно плоскости акустического изображения, и ультразвуковые преобразователи облегчают отслеживание, посредством средства отслеживания инструмента, расстояния интервенционного инструмента относительно плоскости акустического изображения. Навигатор изображения отображает графический значок в пределах ультразвукового изображения анатомической области, создаваемого ультразвуковым сканером, для иллюстрации отслеживания интервенционного инструмента относительно плоскости акустического изображения посредством средства отслеживания инструмента. Один или несколько аспектов графического значка модулируются навигатором изображения, реагирующим на расстояние интервенционного инструмента относительно плоскости акустического изображения, когда осуществляется навигация интервенционного инструмента в анатомической области.
Вышеупомянутая форма, и другие формы настоящего изобретения, а также различные признаки и преимущества настоящего изобретения станут еще более очевидными из прочтения следующего подробного описания различных вариантов реализации настоящего изобретения совместно с сопровождающими чертежами. Подробное описание и чертежи служат исключительно иллюстративным целям для настоящего изобретения, а не ограничивают объем притязаний настоящего изобретения, определяемого в соответствии с приложенными пп. формулы и их эквивалентами.
Фиг.1A и 1B изображают, соответственно, примерные виды ультразвуковых изображений, как известно в данной области техники.
Фиг.2A и 2B - соответственно иллюстрируют примерную модуляцию графического значка ультразвуковых изображений, показанных на Фиг.1A и 1B, в соответствии с настоящим изобретением.
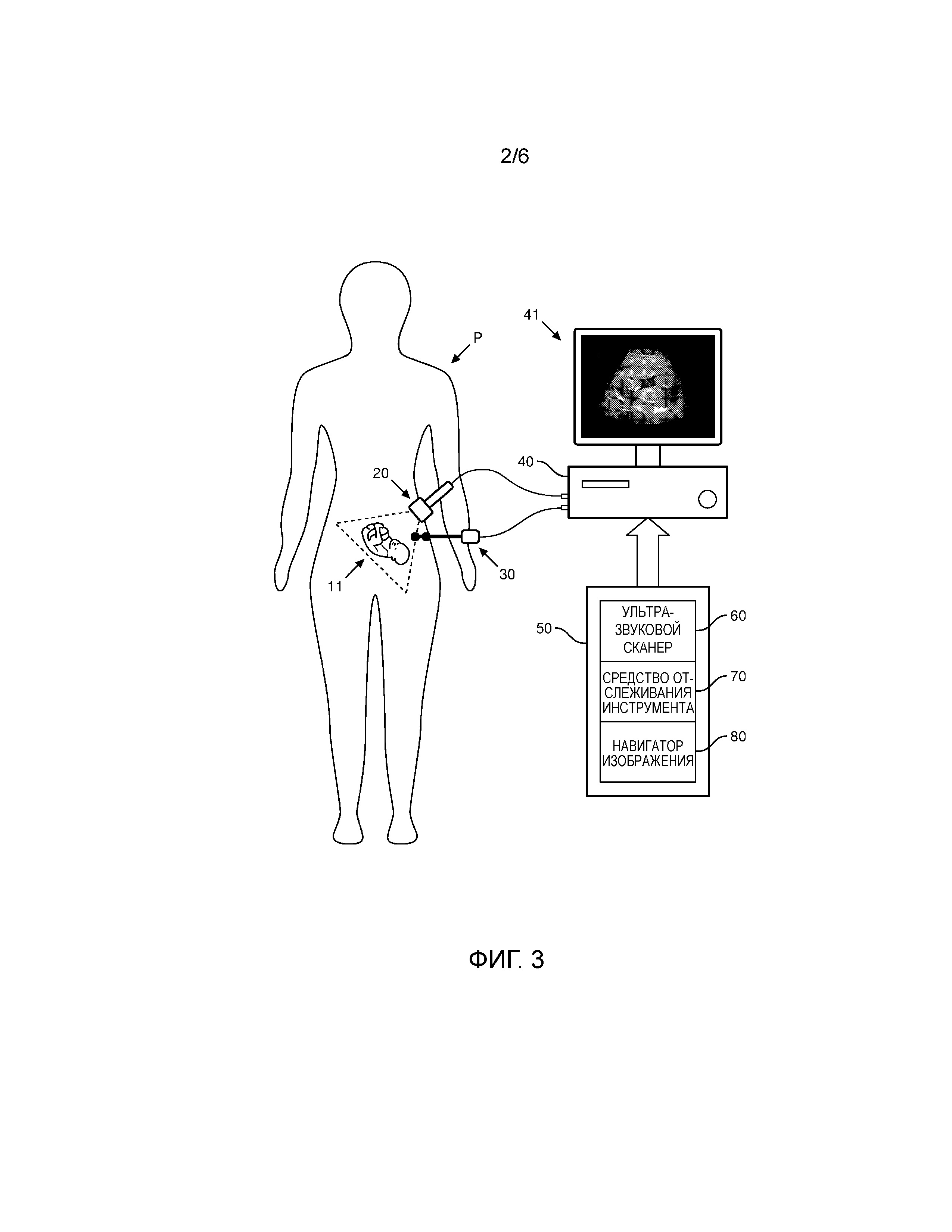
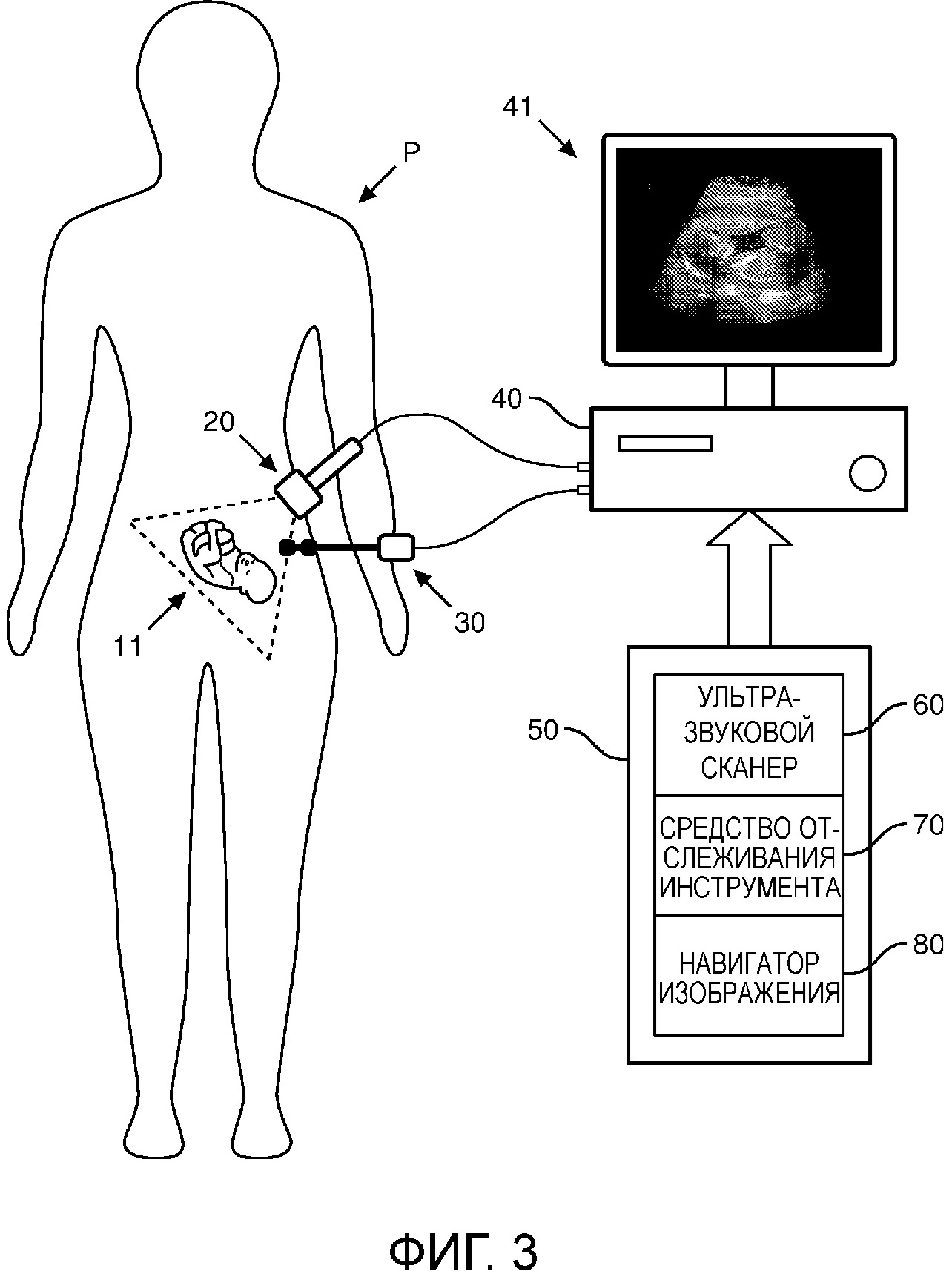
Фиг.3 - примерный вариант реализации системы отслеживания инструмента по настоящему изобретению.
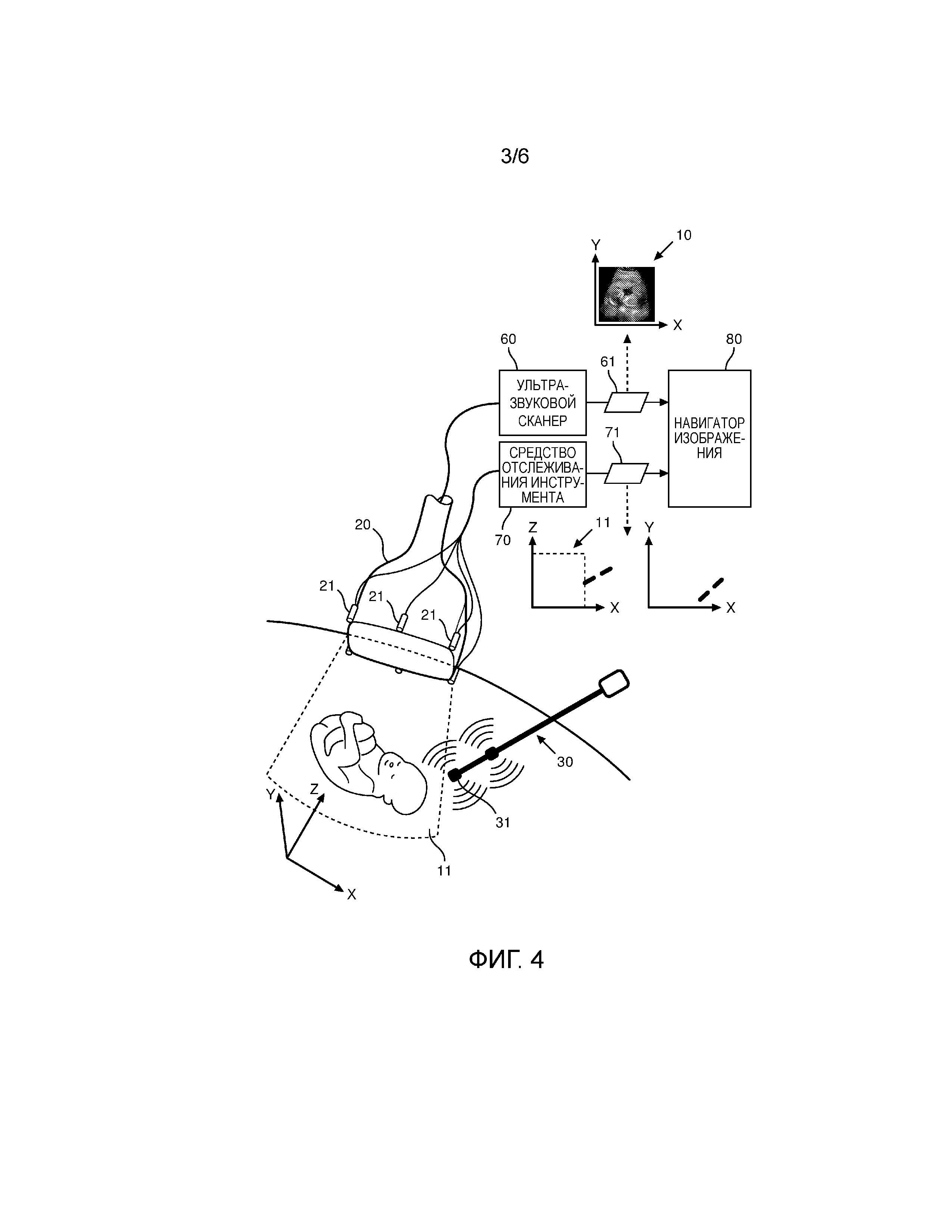
Фиг.4 - примерная интервенционная процедура, включающая систему отслеживания инструмента, показанную на Фиг.3.
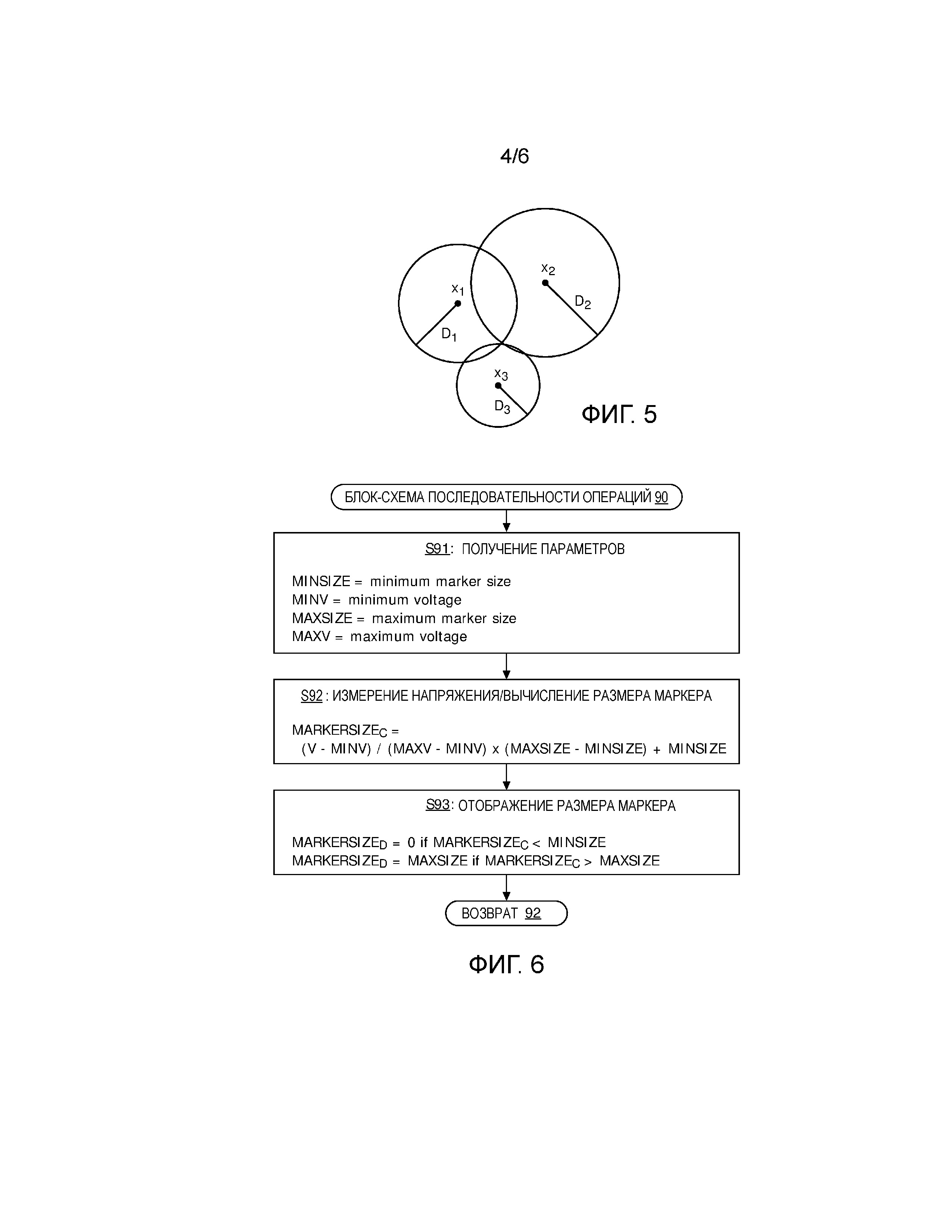
Фиг.5 - примерное выполнение трилатерации, как это известно в данной области техники.
Фиг.6 - блок-схема последовательности операций, характерная для первого примерного варианта реализации способа модуляции графического значка в соответствии с настоящим изобретением.
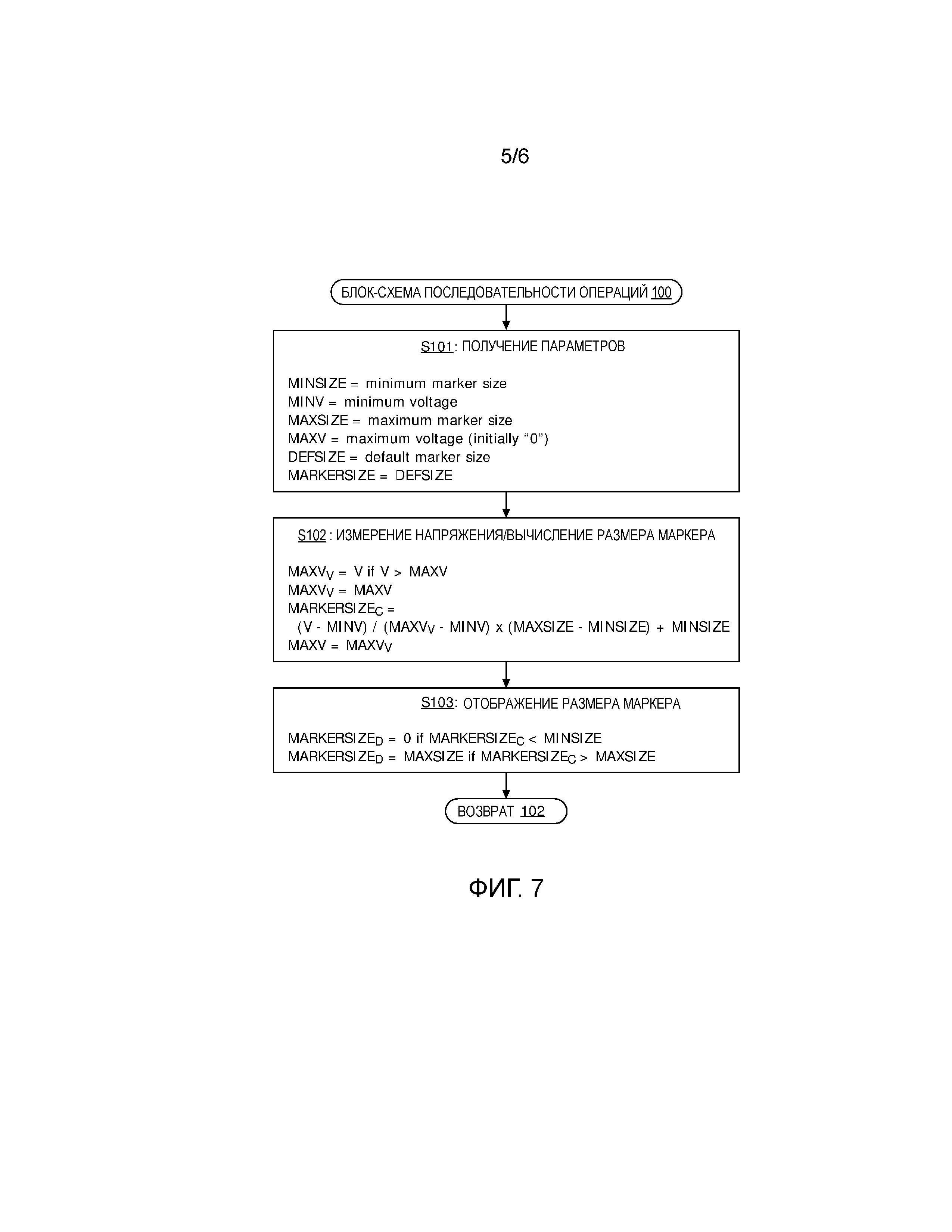
Фиг.7 - блок-схема последовательности операций, характерная для второго примерного варианта реализации способа модуляции графического значка в соответствии с настоящим изобретением.
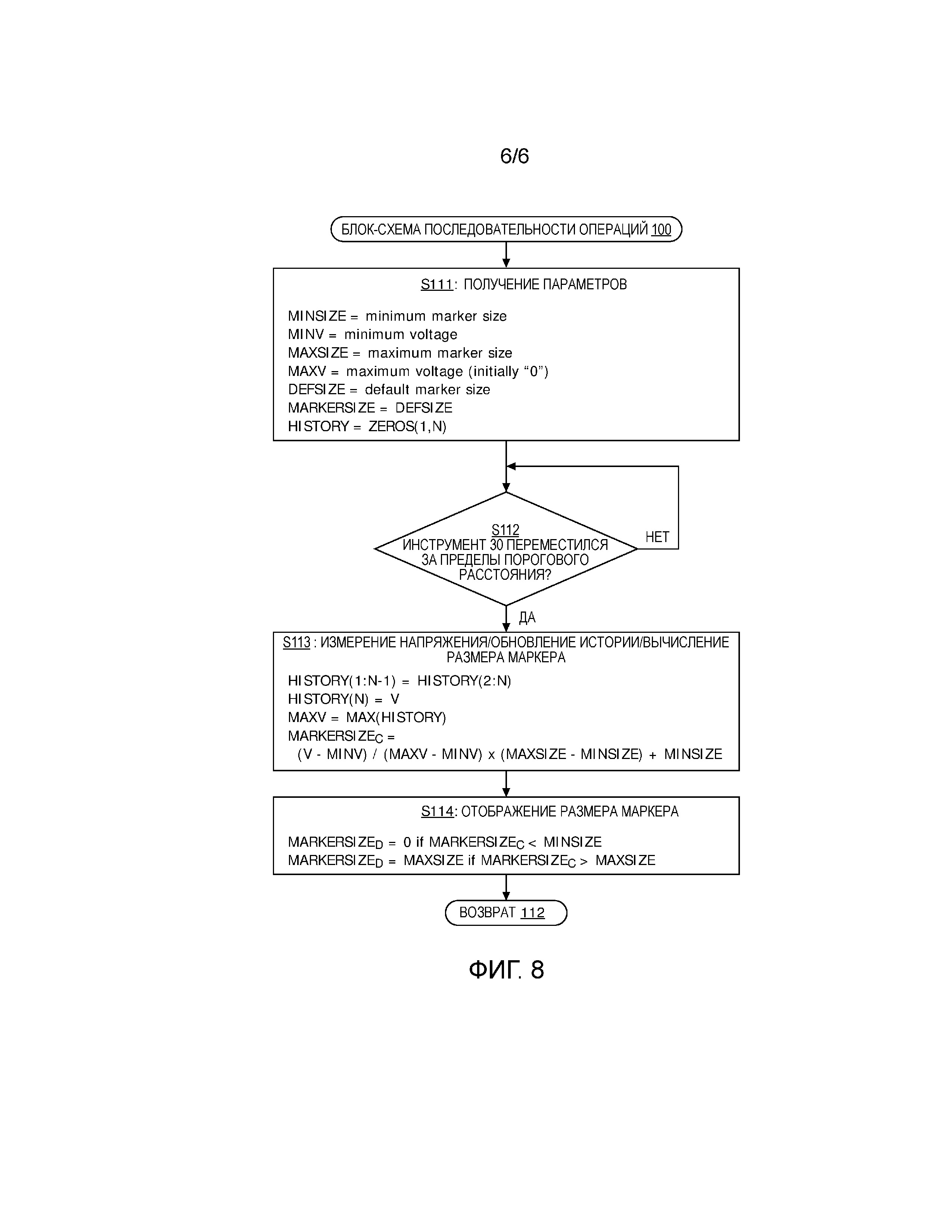
Фиг.8 - блок-схема последовательности операций, характерная для третьего примерного варианта реализации способа модуляции графического значка в соответствии с настоящим изобретением.
Для облегчения понимания настоящего изобретения, примерные варианты реализации настоящего изобретения предоставлены здесь как относящиеся к системе навигации инструмента, показанной на Фиг.3.
Относительно Фиг.3, система навигации инструмента использует ультразвуковой зонд 20, интервенционный инструмент 30, ультразвуковой сканер 60, устройство 70 отслеживания инструмента, и навигатор 80 изображения.
Ультразвуковой зонд 20 представляет собой любое устройство, как известно в данной области техники, для сканирования анатомической области пациента с помощью акустической энергии для визуализации подкожных структур тела (например, сухожилия, мускулы, связки, сосуды и внутренние органы, и т.д.), такого как, например, сканирование анатомической области 12 пациента P11, как показано на Фиг.3. Примеры ультразвукового зонда 20, включают в себя, но без ограничения, двумерный ("2D") ультразвуковой зонд, имеющий одномерную ("1D") решетку преобразователей, линейную или изогнутую.
Ультразвуковой сканер 60 представляет собой структурную конфигурацию аппаратных средств, программного обеспечения, встроенного программного обеспечения и/или электронную схему, как это известно в данной области техники, для создания ультразвукового изображения анатомической области пациента, сканируемого ультразвуковым зондом 20 (например, ультразвукового изображения 10 утробного плода, как показано на Фиг.1-3).
Интервенционный инструмент 30 представляет собой любой инструмент, как известно в данной области техники, для выполнения интервенционных процедур, включающих в себя навигацию интервенционного инструмента 30 в анатомической области. Примеры интервенционного инструмента 30 включают в себя, но без ограничения, иглу и катетер, и примеры интервенционных процедур включают в себя, но без ограничения, биопсии, жидкостной дренаж, блокирования нервов, сосудистый доступ, и т.д.
Для практического облегчения навигации, интервенционный инструмент 30 может быть оборудован одним или несколькими ультразвуковыми преобразователями в форме передатчиков, приемников и/или приемопередатчиков, как известно в данной области техники. Более конкретно, один ультразвуковой преобразователь предоставляет информацию о положении назначенной области интервенционного инструмента 30 (например, дистальный конец интервенционного инструмента 30), и два или более ультразвуковых преобразователя предоставляют информацию об ориентации, которая облегчает отображение запланированной траектории интервенционного инструмента 30 и запланированную точку пересечения с плоскостью 11 ультразвуковой визуализации, таким образом, дополнительно облегчая подходы вне плоскости (которые иначе оказываются слепыми).
В одном варианте реализации, как показано на Фиг.4, пара ультразвуковых преобразователей 31 внедрена в известную конфигурацию, как смежные с дистальным концом на интервенционном инструменте 30. Работая как передатчики, ультразвуковые преобразователи 31 или могут быть отделены неперекрывающимися частотными диапазонами, и/или могут возбуждаться один за другим для облегчения индивидуального отслеживания ультразвуковых преобразователей 31. Аналогично, при работе как приемники, сигналы для каждого ультразвукового преобразователя 31 должны быть индивидуализированы (например, с неперекрывающимися полосами частот, переключателем, двумя (2) независимыми кабелями, или способами обработки сигналов для разделения сигналов).
Для этого варианта реализации интервенционного инструмента 30, как показано на Фиг.4, ультразвуковой зонд 20 может быть снабжен одним или несколькими ультразвуковыми преобразователями 21 для отслеживания ультразвуковых преобразователей 31. Более конкретно, три (3) или более ультразвуковых преобразователя 21 дают удовлетворительные оценки положения ультразвуковых преобразователей 31. Практически, ультразвуковые преобразователи 21 располагаются на ультразвуковом зонде 20 так, чтобы обеспечить широкий приемный угол для эффективного отслеживания ультразвуковых преобразователей 31 в широкой области обзора.
В одном варианте реализации ультразвуковым зондом 20, как показано на Фиг.4, шесть (6) ультразвуковых преобразователей 21 располагаются на 2D поверхности по периметру решетки ультразвукового зонда 20. Практически, для этого варианта реализации ультразвуковые преобразователи 21 могут быть установлены на ультразвуковом зонде 20 как зажимное устройство или как внедренные в конструкцию ультразвукового зонда 20. В любом случае, может быть необходима простая калибровка между отслеживаемым положением и изображением. Такая калибровка может включать в себя зажим на конце интервенционного инструмента 30 на эхо-импульсном изображении при контролируемой визуализируемой среде.
Устройство 70 отслеживания инструмента представляет собой структурную конфигурацию аппаратных средств, программного обеспечения, встроенного программного обеспечения и/или электронной схемы, как известно в данной области техники, для выполнения методики(-ик) отслеживания положения интервенционного инструмента 30 относительно ультразвукового изображения анатомической области. Для ультразвукового отслеживающего варианта реализации ультразвукового зонда 20 и интервенционного инструмента 30, как показано на Фиг.4, устройство 70 отслеживания инструмента выполняет алгоритм трилатерации для определения 3D положения ультразвуковых преобразователей 31 на основании времени прохождения сигналов между ультразвуковыми преобразователями 21 и ультразвуковыми преобразователями 31.
Практически, три (3) пары местоположение-расстояние необходимы для выполнения 3D локализации, но любые дополнительные пары местоположение-расстояние увеличивают надежность. В одном варианте реализации, как это соответствует Фиг.5, линейная оценка по методу наименьших квадратов для местоположения ультразвуковых преобразователей 31 может быть получена со следующим уравнением:
 обозначает местоположение ith (i=J, …, N) преобразователей 21,
обозначает местоположение ith (i=J, …, N) преобразователей 21,
 - расстояние от виртуального преобразователя 21 до начала координатной рамки,
- расстояние от виртуального преобразователя 21 до начала координатной рамки,
 - расстояние между каждым преобразователем 21 и датчиком 31, и
- расстояние между каждым преобразователем 21 и датчиком 31, и
 - местоположение каждого преобразователя 21, определяемое как начальное.
- местоположение каждого преобразователя 21, определяемое как начальное.
В альтернативном варианте реализации, использующем ультразвуковые преобразователи 31, и опускающем ультразвуковые преобразователи 21, устройство 70 отслеживания инструмента выполняет алгоритм для вычисления положения датчика относительно опорной рамки визуализации. Более конкретно, устройство 70 отслеживания инструмента определяет проекцию 3D положения (X-азимут, Z-глубина, Y-высота) на 2D положение в плоскости 11 изображения (x-z или r-тета). Для этого варианта реализации, Z-глубина (или диапазон) координаты получается измерением времени прохождения сигналов ультразвука от ультразвукового зонда 20 на ультразвуковые преобразователи 31, и X-азимутальное (или угловое) положение получается отысканием максимальной принятой амплитуды среди принятых пучков в ультразвуковых преобразователях 31. Качественная оценка координаты Y (расстояние от датчиков 31 до плоскости 11 визуализации) получается записью принятой амплитуды сигналов в преобразователях 31 и сравнением их с прошлой информацией: увеличение амплитуды обычно означает, что датчики 31 приближаются к плоскости 11 визуализации, тогда как уменьшение амплитуды означает, что датчики 31 удаляются от плоскости 11 визуализации.
Навигатор 80 изображения представляет собой структурную конфигурацию аппаратных средств, программного обеспечения, встроенного программного обеспечения и/или электронной схемы, как известно в данной области техники, для выполнения методики(-ик) отображения ультразвукового изображения, создаваемого ультразвуковым сканером 60 и, в соответствии с настоящим изобретением, для создания графического значка для иллюстрации отслеживания интервенционного инструмента 30 относительно плоскости 11 акустического изображения посредством средства 70 отслеживания перемещения. Более конкретно, когда осуществляется навигация интервенционного инструмента 30 в анатомической области, навигатор 80 изображения модулирует один или несколько аспектов графического значка (например, размер, цвет, форму), чтобы качественно указать отслеживаемое расстояние интервенционного инструмента 30 относительно плоскости 11 акустического изображения. С этой целью, навигатор 80 изображения вводит данные 61 от ультразвукового сканера 60, характеризующие ультразвуковое изображение 10, и вводит данные 71 от устройства 70 отслеживания инструмента, характеризующие 3D положения (X-азимут, Z-глубина) интервенционного инструмента 30 относительно плоскости 11 акустического изображения.
Для облегчения понимания модуляции графического значка, примерные варианты реализации навигатора 80 изображения будут представлены здесь как относящиеся к модуляции размера маркера, как показано на Фиг.6-8, для качественного указания расстояния ультразвуковых преобразователей 31 до плоскости ультразвукового изображения 11. Хотя эти примерные варианты реализации используют амплитуды или SNR SNR принятых сигналов, и сравнивают их с историей принятых амплитуд или SNR, для модуляции вида маркера, обычные специалисты в данной области техники увидят, как применить принципы этих примерных вариантов реализации к другим модуляционным аспектам (например, форме, цвету, гистограмме, и т.д.) и к количественной оценке сигналов для определения расстояния Y-высоты. Обычные специалисты в данной области техники также увидят различные модификации и вариации этих примерных вариантов реализации модуляции графического значка.
Обычно бывает желательно, чтобы размер маркера (переменная "markerSize") был максимален (до фиксированного максимального размера "maxSize"), когда уровень сигнала (V) на ультразвуковом преобразователе 31 падает ниже некоторого напряжения, или некоторого SNR, и минимален (до фиксированного минимального размера "minSize"), когда ультразвуковой преобразователь 31 находится на плоскости 11 визуализации на любой глубине. На промежуточных уровнях, размер маркера является промежуточным. Практически, размер маркера может быть максимальным размером маркера (переменная "markerSize") (до фиксированного максимального размера "maxSize"), когда ультразвуковой преобразователь 31 находится на плоскости 11 визуализации на любой глубине, и минимальным (до фиксированного минимального размера "minSize"), когда уровень сигнала (V) в ультразвуковом преобразователе 31 падает ниже некоторого напряжения, или некоторого SNR.
Также, на практике, кривая markerSize=f(V) или markerSize=f (SNR) должна монотонно увеличиваться или уменьшаться, но может быть линейной как описано здесь, или нелинейной (например, логарифмической). Когда уровни сигнала падают ниже установленного минимального приемлемого уровня сигнала (minV или minSNR), маркер не отображается на экране. Во всех вариантах реализации, как показано на Фиг.6-8, минимальный размер маркера ("minSize") соответствует минимальному приемлемому принятому напряжению, или принятому SNR, который является фиксированным параметром ("minV"/"minSNR"). При меньших принятых уровнях сигнала, маркер более не отображается. Это исключает возможность отображения потенциально неправильных местоположений датчика в сценариях с малым SNR.
В варианте реализации с фиксированным максимальным напряжением, из минимального размера маркера "minSize" реализуется монотонно увеличивающаяся кривая размера относительно амплитуды принятого сигнала, или SNR. Размер маркера "markerSize", таким образом, непосредственно представляет интенсивность принятого сигнала, которая увеличивается при данной глубине, когда ультразвуковой преобразователь 31 подходит к плоскости 11 визуализации, и уменьшается, когда он удаляется от плоскости 11 визуализации. Для ограничения максимального размера маркера, может быть решено, чтобы маркер прекратил расти вне "maxSize" после максимальной приемлемой интенсивности сигнала "maxV".
На Фиг.6 показана блок-схема 90 последовательности операций примерного варианта реализации с фиксированным максимальным напряжением. Относительно Фиг.6, этап S91 блок-схемы 90 последовательности операций охватывает навигатор 80 изображения, получающий параметры, необходимые для вычисления навигатором 80 изображения "markerSizeC" в течение этапа S92 блок-схемы 90 как функции измеренного напряжения V, указывающего амплитуду принятого сигнала в соответствии со следующим уравнением:
markerSizeC=(V-minV)/(maxV-minV)*(maxSize-minSize)+minSize
Этап S93 блок-схемы 90 последовательности операций охватывает навигатор 80 изображения, отображающий "markerSizeD" в соответствии со следующими уравнениями:
markerSizeD=0, если markerSizeC<minsize
markerSizeD=maxSize, если markerSizeC>maxSize
Навигатор 80 изображения возвращается на этап S92 для повторения этапов S92 и S93, если необходимо.
В варианте реализации с варьирующимся максимальным напряжением, максимальный размер маркера ("maxSize") является варьирующимся и соответствует максимальной интенсивности сигнала, принятого ультразвуковым преобразователем 31, поскольку эксперимент был начат (переменная "maxV"). Каждый раз, когда сигнал принят, его интенсивность сравнивается с максимальным прошлым принятым сигналом. Если она превышает его, сигнал "maxV", соответствующий максимальному размеру маркера, обновляется. Этот вариант реализации гарантирует максимальное отклонение размера маркера, когда интервенционный инструмент 30 продвигается в анатомической области.
На Фиг.7 показана блок-схема 100 последовательности операций, представляющая примерный вариант реализации с варьирующимся максимальным напряжением. Относительно Фиг.7, этап S101 блок-схемы 100 охватывает навигатор 80 изображения, получающий параметры, необходимые для вычисления навигатором 80 изображения "markerSizeC" в течение этапа S102 блок-схемы 100 как функции измеренного напряжения V, указывающего амплитуду принятого сигнала, сравниваемого с переменной "maxVv". Конкретно, начальное выполнение этапа S101 включает в себя установку "maxV" на 0 и markerSize на "defaultSize", и этап S102, включает в себя установку "maxV" до измеренного напряжения V, если измеренное напряжение V больше, чем "maxV", или другую установку "maxVv"="maxV". Установка "maxVv" вводится в вычисление "markerSizeC" в соответствии со следующим уравнением:
markerSizeC=(V-minV)/(maxVV-minV)*(maxSize-minSize)+minSize
Затем, "maxV"="maxVV".
Этап S93 блок-схемы 90 охватывает навигатор 80 изображения, отображающий "markerSizeD" в соответствии со следующими уравнениями:
markerSizeD=0, если markerSizeC<minsize
markerSizeD=maxSize, если markerSizeC>maxSize
Навигатор 80 изображения возвращается на этап S102 для повторения этапов S102 и S103, если необходимо.
Варианты реализации с фиксированным максимальным напряжением и варьирующимся максимальным напряжением гарантируют отображение растущего маркера, когда ультразвуковой преобразователь 31 перемещается к плоскости 11 визуализации при данной глубине визуализации. Однако, как известно в данной области техники, амплитуда принятого сигнала также зависит от глубины, так, чтобы вариация размера маркера как функция расстояния вне плоскости была зависящей от глубины, и изменения глубины датчика также приведет к изменениям размера маркера.
Для смягчения или исключения этого эффекта, в варианте реализации с минимальным движением, текущая амплитуда принятого сигнала сравнивается с недавней историей амплитуд сигнала. Длительность истории представляет собой устанавливаемый параметр, обычно устанавливаемый как несколько секунд данных, или характерное время для продвижения датчика в поле ультразвука. Максимальный размер маркера (устанавливаемый параметр) устанавливается как соответствующий максимальному принятому сигналу, или SNR, в течение этой истории. Как дополнительное усовершенствование, файл истории обновляется каждый раз, когда ультразвуковой преобразователь 31 измеряется для значительного перемещения (выше установленного порогового расстояния), как измерено по его отслеживаемому положению. Это гарантирует, что максимальный установленный размер маркера будет отображен, когда ультразвуковой преобразователь 31 находится в плоскости на любой глубине, при условии, что характерное время движения поперек плоскости больше, чем таковое для движения по глубине.
На Фиг.8 показана блок-схема 110 последовательности операций, показывающая вариант реализации с минимальным движением. Относительно Фиг.8, этап S111 блок-схемы 110 охватывает навигатор 80 изображения, получающий параметры, необходимые для вычисления навигатором 80 изображения "markerSizeC" в течение этапа S113 блок-схемы 110 как функции истории измеренного напряжения V, указывающего амплитуду принятого сигнала, связанную с движением интервенционного инструмента 30. Конкретно, начальное выполнение этапа S111 включает в себя установку "maxV" на 0; markerSize как "defaultSize", и обнуление истории.
Этап S112 блок-схемы 110 охватывает навигатор 80 изображения, определяющий, был ли интервенционный инструмент 30 перемещен вне порогового расстояния. Если так, то навигатор 80 изображения переходит на этап S113 для обновления истории с измеренным напряжением V в соответствии со следующими уравнениями:
история (1:N-1)=история (2:N)
история (N)=V
maxV=максимальный (история)
markerSizeC=(V-minV)/(maxV-minV)*(maxSize-minSize)+minSize
Этап S113 блок-схемы 110 охватывает навигатор 80 изображения, отображающий "markerSizeD" в соответствии со следующими уравнениями:
markerSizeD=0, если markerSizeC<minsize
markerSizeD=maxSize, если markerSizeC>maxSize
Навигатор 80 изображения возвращается на этап S112 для повторения этапа S112-S114, если необходимо.
Все вышеупомянутые варианты реализации могут быть успешно модифицированы, учитывая измеряемое текущее пространственное положение, особенно глубину интервенционного инструмента 30. Конкретно, как известно в данной области техники, амплитуда поля изменяется с глубиной и расстоянием вне плоскости (и в меньшей степени - с азимутом). Задача заключается в том, чтобы устранить вариацию размера отображаемого маркера как функцию глубины, но сохранить вариации размера маркера как функцию расстояния вне плоскости при данной глубине.
Ниже рассматриваются различные возможные схемы включения информации о глубине (и азимуте) в блок-схемы на Фиг.6-8 последовательности операций для отображения.
Во-первых, для варианта реализации с фиксированным максимальным напряжением на Фиг.6, вместо фиксированного максимального размера маркера (переменная "maxSize"), устанавливается справочная таблица размеров маркера как функция глубины (и возможно азимута, или азимутального угла). Эта таблица строится на основании некоторой калибровки пространственного поля, которая заранее достигается моделированием или/и измерением или оперативным моделированием. Различные справочные таблицы могут использоваться для различных зондов, режимов визуализации, устанавливаемых параметров (например, плотность пучка) и передавать фокальную глубину для различных степеней точности. Объемное затухание в анатомической области может быть измерено сравнением экспоненты с кривой, дающей данные амплитуды рассеяния назад как функцию глубины (по эхо-импульсным данным), и добавлено как вводные данные к моделированию. Кроме того, максимальный размер маркера может быть функцией интервенционного инструмента 30.
Во-вторых, в вариантах реализации, устанавливающих maxV как максимальное прошлое считанное значение в файле истории, текущее считываемое напряжение сравнивается только со считываниями напряжения в истории с подобной глубиной (например, не более чем 1 см от текущего считывания).
В-третьих, грубая пространственная сетка может быть установлена и для каждого пикселя в этой сетке максимальное считанное значение в соответствующей области устанавливается как локальное максимальное считанное значение maxV. Эти последние варианты реализации могут быть с полевым моделированием, ограничивая моделирование фактическими считываниями.
Хотя были показаны и описаны различные варианты реализации настоящего изобретения, специалисты в данной области техники поймут, что описанные здесь варианты реализации настоящего изобретения являются иллюстративными, и могут быть выполнены различные изменения и модификации, и эквивалентами можно заменить их элементы, не отступая от истинного объема притязаний настоящего изобретения. Кроме того, много модификаций может быть сделано для наглядной адаптации настоящего изобретения, не отступая от его сущности. Поэтому, предполагается, что настоящее изобретение не ограничено конкретными раскрытыми вариантами реализации, как наилучшими для воплощения настоящего изобретения, и настоящее изобретение включает в себя все варианты реализации, находящиеся в пределах объема приложенных пунктах формулы.
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия
Интраоперационный мониторинг качества систем отслеживания
Удаление артефактов от генератора электромагнитного поля из трехмерного снимка
Опознавание характерных признаков дисторсии для компенсации, обнаружения и коррекции ошибок при электромагнитном слежении
Лучевая терапия с адаптивным расчетом дозы в реальном масштабе времени
Система и способ акустической визуализации с помощью когерентного объединения с использованием межреберных пространств
Наведение на целевой вид по обратной связи при получении ультразвуковых данных
Система и способ для отслеживания проникающего инструмента
Игла с датчиками на основе пьезоэлектрических полимеров
Игла с несколькими датчиками

