Результат интеллектуальной деятельности: ОПОЗНАВАНИЕ ХАРАКТЕРНЫХ ПРИЗНАКОВ ДИСТОРСИИ ДЛЯ КОМПЕНСАЦИИ, ОБНАРУЖЕНИЯ И КОРРЕКЦИИ ОШИБОК ПРИ ЭЛЕКТРОМАГНИТНОМ СЛЕЖЕНИИ
Вид РИД
Изобретение
Настоящее изобретение относится к электромагнитному (ЭМ) слежению и, в частности, к системам и способам опознавания характерных признаков дисторсии для повышения точности ЭМ слежения.
ЭМ слежение осуществляют с использованием генератора поля, который создает пространственно-переменные магнитные поля, которые наводят токи в чувствительных катушках. Затем применяют измерительную систему для вычисления позиции и ориентации по измеренным напряжениям. Методы ЭМ слежения обеспечивают в реальном времени информацию о позиции и ориентации в трехмерном (3-мерном) пространстве и применяются для поддержки интервенционных процедур. Поскольку размеры упомянутых чувствительных катушек очень малы, их можно встраивать в катетер или другое устройство и можно использовать для управляемой навигации. Данная система описана, например, в заявке на патент США №2008/200927, поданной Хартманном с соавторами (Hartmann et al.). В результате, системы ЭМ слежения отлично подходят для интервенционных вмешательств внутри тела. Присутствие ферромагнитных или парамагнитных проводников, например, в медицинском оборудовании, может вызвать дисторсию ЭМ поля, и, как известно, электромагнитные помехи от соседней электронной аппаратуры снижают точность ЭМ слежения. В результате, для интервенциониста не существует надежного способа получения сведений о том, точно ли отслежена точка.
Металлические хирургические инструменты вызывают дисторсии в электромагнитном (ЭМ) поле, которые могут поставить под сомнение достигаемые точности навигации во время ЭМ слежения. Например, рентгеновский детектор вносит дисторсии во время процедур в лаборатории интервенционных диагностики и лечения. Разные методы обеспечения контроля качества включают в себя обнаружение и компенсацию ошибки, обусловленной крупными металлическими, вызывающими дисторсию объектами, во время ЭМ слежения. Одна упомянутая схема для оценки в реальном времени степеней достоверности ошибок основана на калибровочных зондах. Другая схема основана на рациональном позиционировании пациента или устройства формирования изображения. Другие методы основаны на калибровочных фантомах и известной геометрии датчиков или на калибровках ЭМ средств по другим средствам визуализации, например, по рентгеновским или ультразвуковым изображениям, чтобы обеспечить интраоперационный контроль качества.
В соответствии с принципами настоящего изобретения, система для учета дисторсии электромагнитного (ЭМ) поля (в дальнейшем, ЭМ (электромагнитной) дисторсии) с использованием системы ЭМ слежения содержит матрицу датчиков, сконфигурированную с возможностью определения ЭМ энергии в заданном объеме. Модуль коррекции ЭМ измерений сконфигурирован с возможностью анализа данных из матрицы датчиков для обнаружения вызывающих ЭМ дисторсию объектов в заданном объеме. Модуль коррекции ЭМ измерений дополнительно сконфигурирован с возможностью сравнения характерных признаков дисторсии, хранящихся в базе данных, для идентификации источника дисторсии.
Система для учета электромагнитной (ЭМ) дисторсии с использованием системы ЭМ слежения содержит базу данных, сформированную посредством сохранения множества охарактеризованных дисторсионных морфологий в виде характерных признаков, соответствующих инструментам, устройствам и их сочетаниям, которые вызывают дисторсии ЭМ поля. Матрица датчиков сконфигурирована с возможностью интраоперационного определения ЭМ энергии в заданном объеме. Модуль коррекции ЭМ измерений сконфигурирован с возможностью анализа данных из матрицы датчиков для обнаружения вызывающих ЭМ дисторсию объектов в заданном объеме. Модуль коррекции ЭМ измерений дополнительно сконфигурирован с возможностью сравнения характерных признаков дисторсии, хранящихся в базе данных, для идентификации источника дисторсии и выдачи, по меньшей мере, чего-то одного из позиции и ориентации вызывающего дисторсию объекта, карты ошибок, показывающей ошибку, внесенную вызывающим дисторсию объектом, или идентификации неизвестного вызывающего дисторсию объекта.
Способ учета электромагнитной (ЭМ) дисторсии с использованием системы ЭМ слежения содержит этап измерения ЭМ ошибок с использованием матрицы датчиков, сконфигурированной с возможностью определения ЭМ энергии в заданном объеме; этап сравнения характерных признаков дисторсии, хранимых в базе данных, для идентификации источника дисторсии посредством анализа данных из матрицы датчиков в заданном объеме; и этап выдачи, по меньшей мере, чего-то одного из позиции и ориентации вызывающего дисторсию объекта, карты ошибок, показывающей ошибку, внесенную вызывающим дисторсию объектом, или идентификации неизвестного вызывающего дисторсию объекта.
Настоящее изобретение подробно представлено в последующем описании предпочтительных вариантов осуществления, со ссылкой на нижеследующие фигуры, на которых:
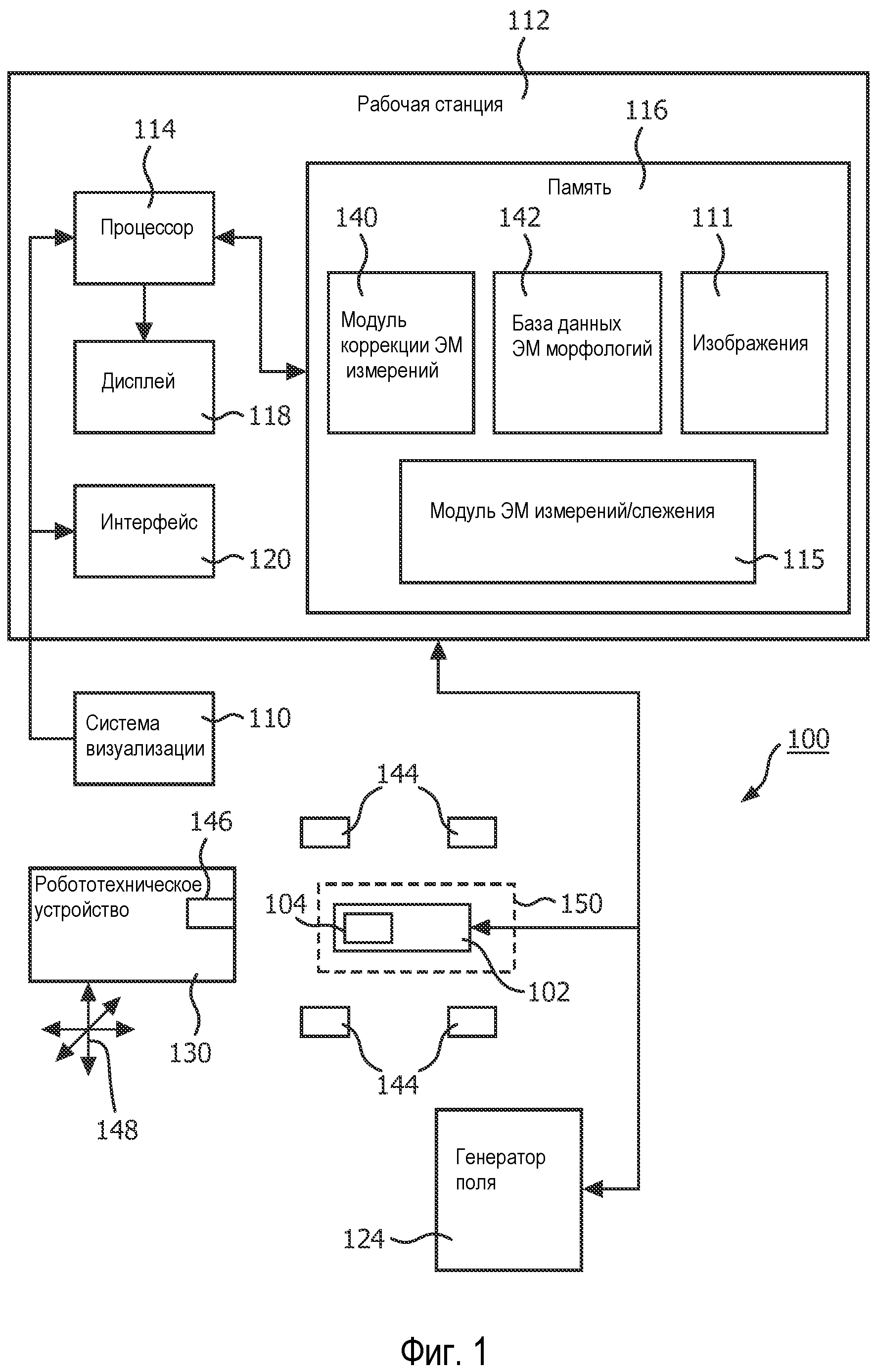
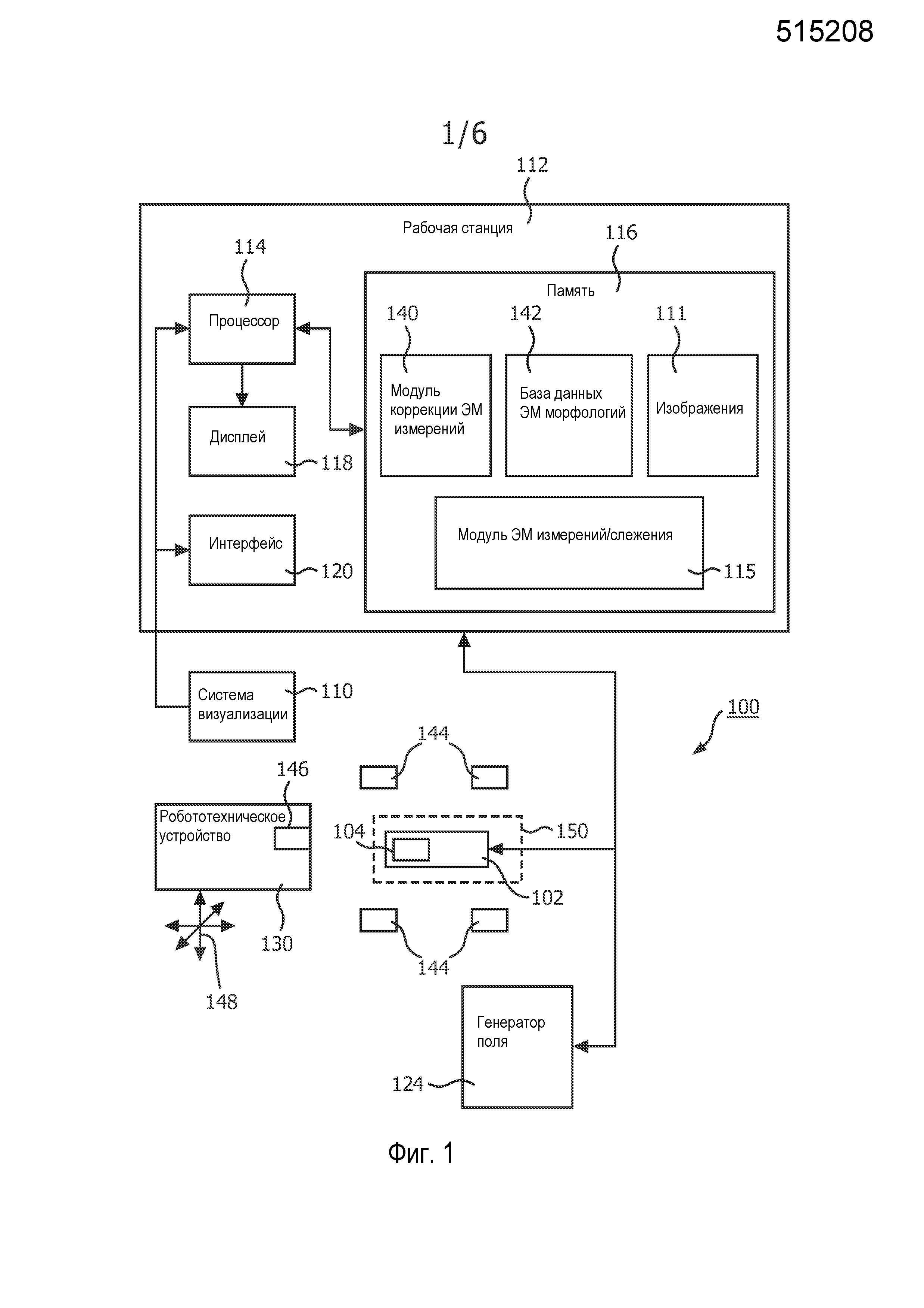
Фиг. 1 - блок-/структурная схема, представляющая систему для учета электромагнитной (ЭМ) ошибки из-за вызывающих дисторсию объектов в окружающей среде ЭМ слежения, в соответствии с одним наглядным вариантом осуществления;
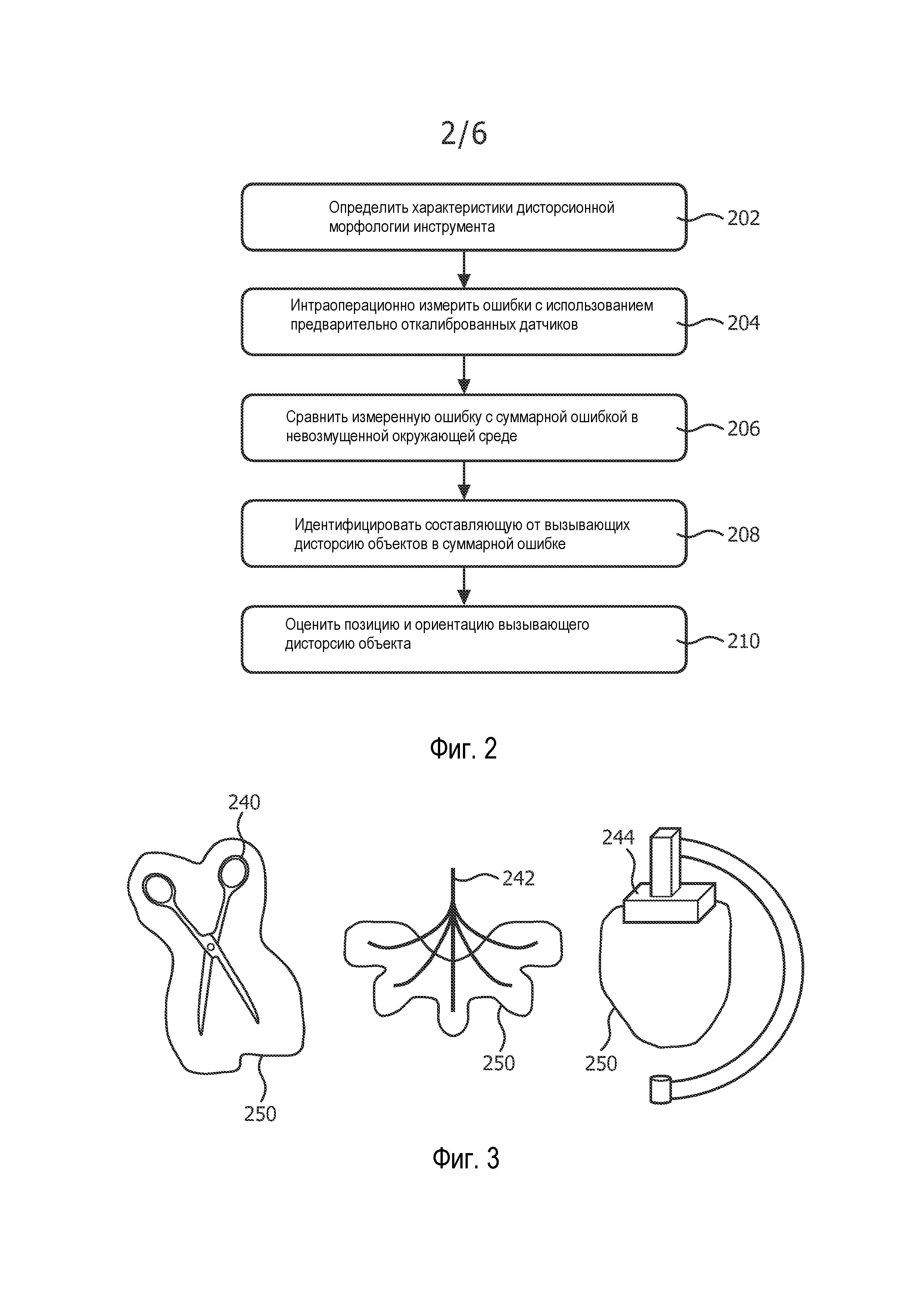
Фиг. 2 - блок-схема последовательности операций способа идентификации вызывающих дисторсию объектов, их позиции и ориентации в соответствии с одним наглядным вариантом осуществления;
Фиг. 3 - схема, наглядно представляющая дисторсию, созданную тремя примерными источниками дисторсии (например, ножницами, абляционным зондом и детектором C-образной консоли);
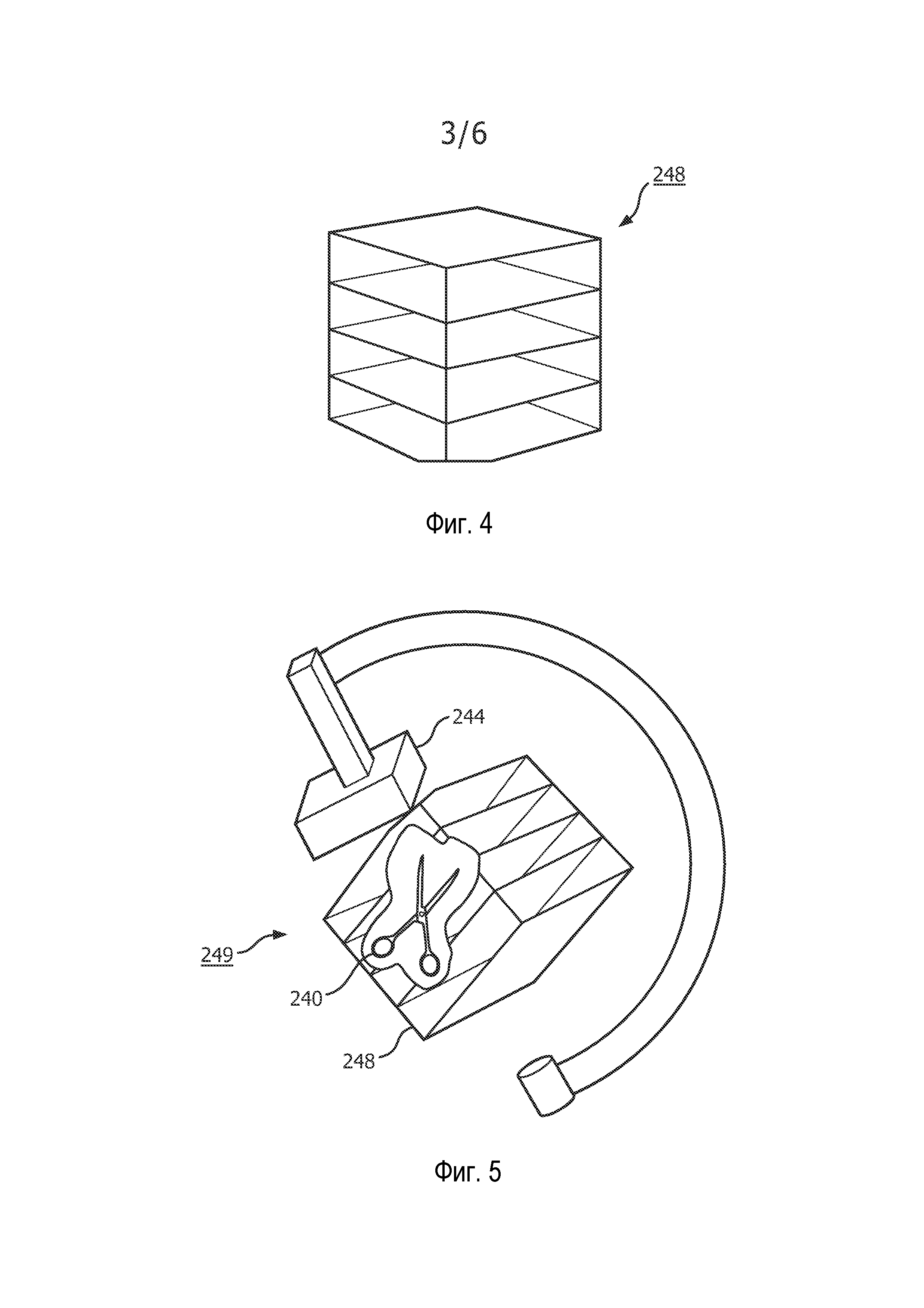
Фиг. 4 - наглядное пространственное представление ЭМ поля без вызывающих дисторсию объектов (в невозмущенной окружающей среде) в соответствии с одним наглядным вариантом осуществления;
Фиг. 5 - наглядное пространственное представление ЭМ поля с дисторсией от детектора C-образной консоли и ножниц, для демонстрации суммарной ошибки, обусловленной фоном окружающей среды и обусловленной вызывающими дисторсию объектами, в соответствии с одним наглядным вариантом осуществления;
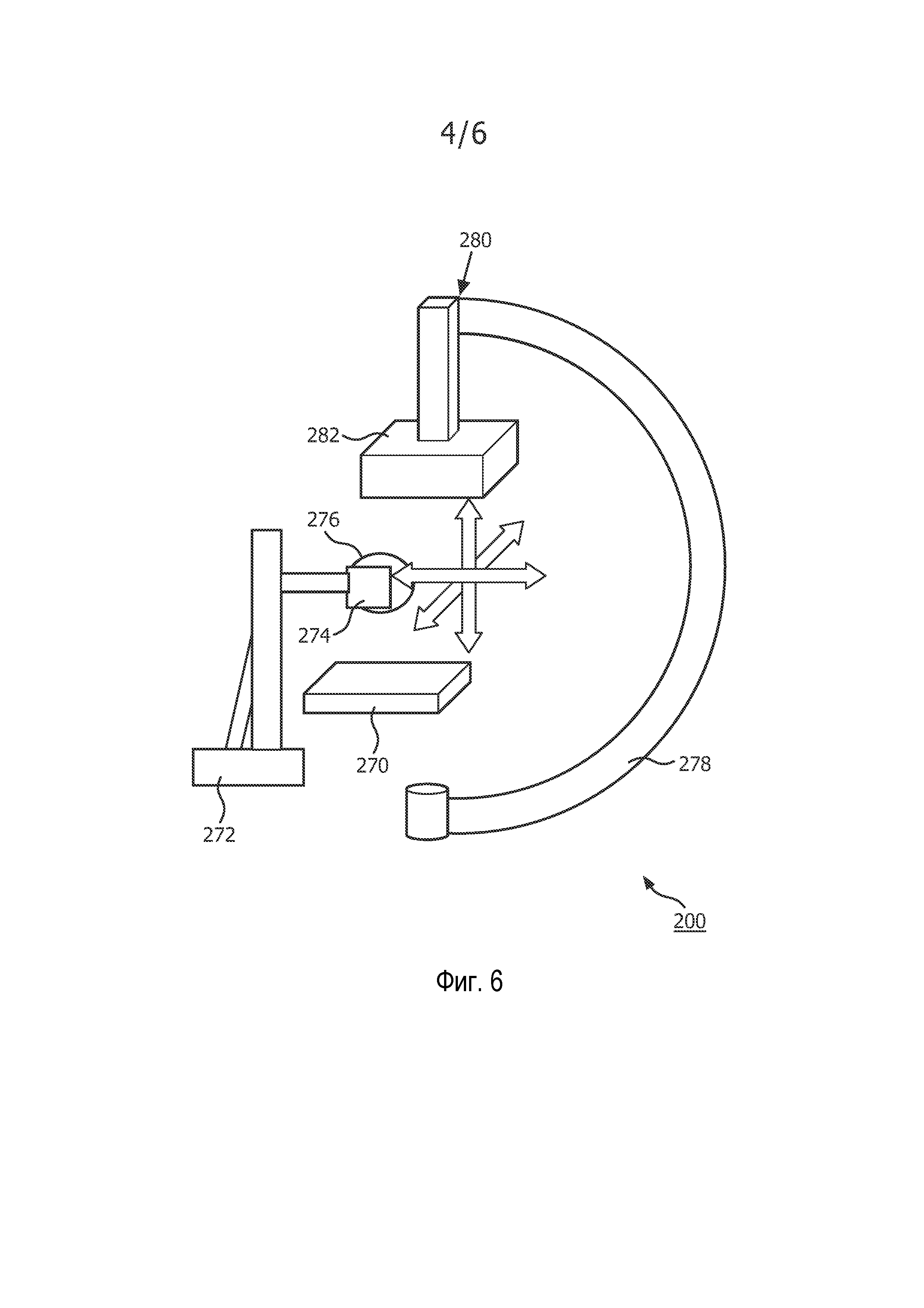
Фиг. 6 - схематическое представление робота, сконфигурированного с возможностью определения ЭМ поля, обусловленного C-образным детектором, в зоне заданного объема, для определения характеристик дисторсионной морфологии (характерных признаков) C-образного детектора в соответствии с одним наглядным вариантом осуществления;
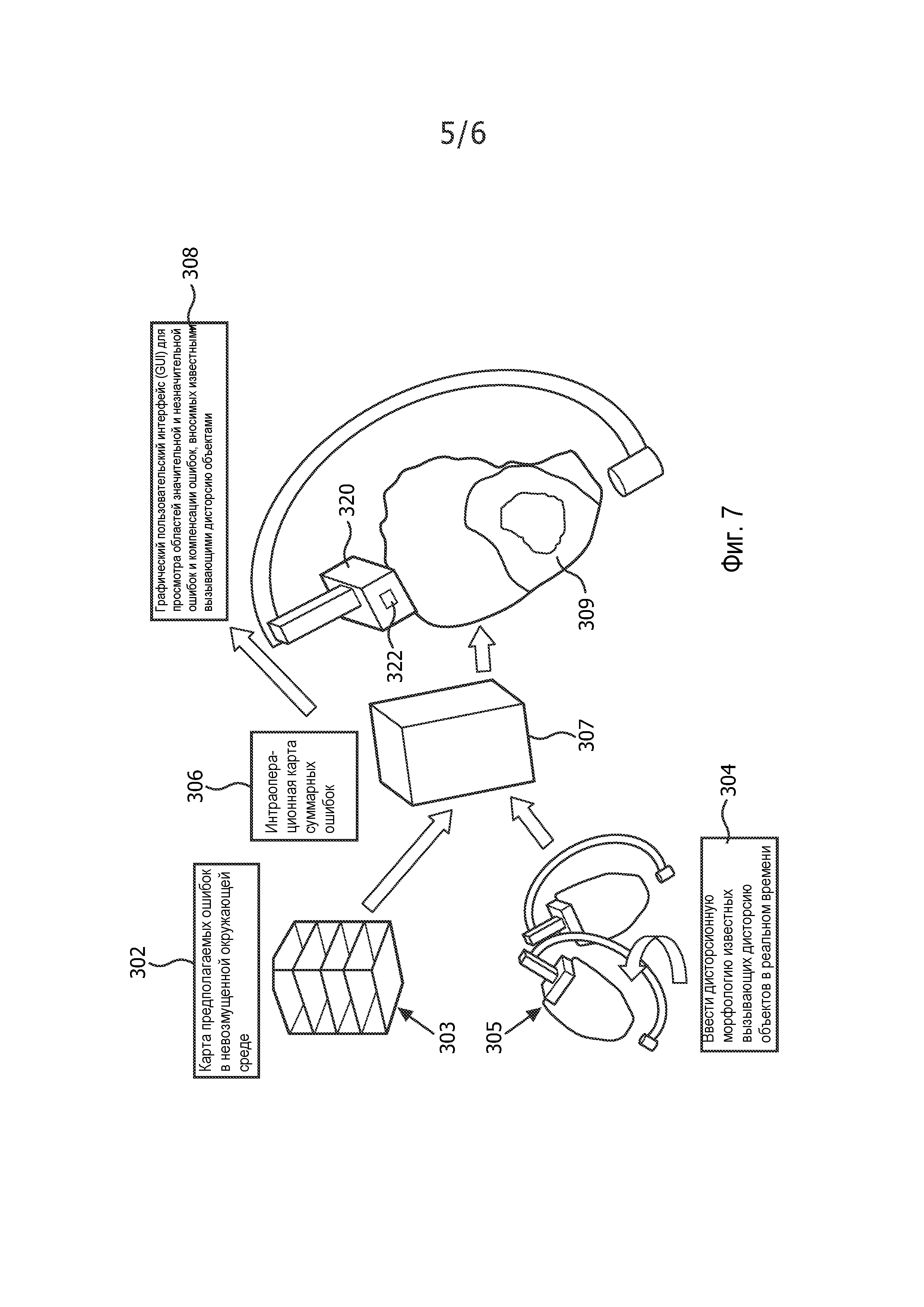
Фиг. 7 - блок-схема последовательности операций способа формирования карт ошибок для компенсации ЭМ дисторсии в соответствии с одним наглядным вариантом осуществления; и
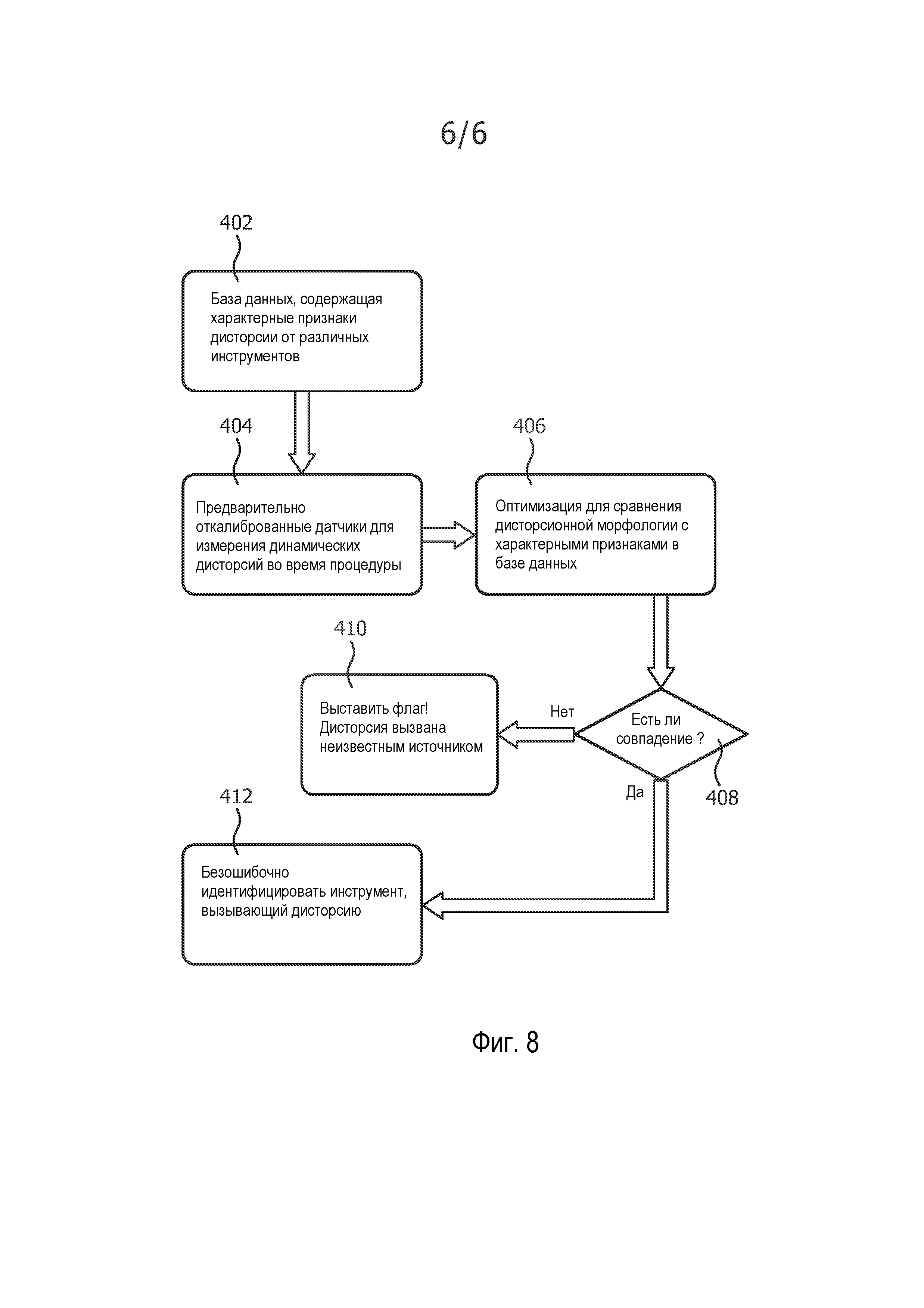
Фиг. 8 - блок-схема последовательности операций способа определения неизвестного источника ЭМ дисторсии в соответствии с одним наглядным вариантом осуществления.
В соответствии с принципами настоящего изобретения, характерные признаки ЭМ дисторсии используют для формирования карт ошибок в реальном времени, позволяющих визуализировать области незначительной и значительной ошибки внутри объема слежения. Кроме того, когда известны идентификационные данные вызывающего дисторсию объекта, его местоположение и вызванная ошибка, система может компенсировать ошибки от предполагаемых вызывающих дисторсию объектов, что повышает точность во время слежения. В одном варианте осуществления, для интраоперационного создания карт ошибок и визуализации областей высокой и низкой точности внутри объема слежения применяют опознавание характерных признаков дисторсии. Варианты осуществления могут также дополнительно вводить дисторсионные морфологии известных инструментов в карту суммарных ошибок посредством обеспечения датчиков, смонтированных на инструментах, и могут компенсировать ошибки, которые вносятся известными вызывающими дисторсию объектами.
Карта ошибок может быть создана для всей области, чтобы интраоперационно визуализировать области незначительной и значительной ошибки. Например, если вызывающий дисторсию объект перемещается в поле, то карта ошибок и области с высокой и низкой точностью также изменяются, однако, остаются наблюдаемыми во время операции. Благодаря знанию идентификационных данных и позиции вызывающего дисторсию объекта и его характерных признаков, можно вычислить составляющую его дисторсии в суммарной ошибке, и, следовательно, можно компенсировать ошибки, обусловленные известными вызывающими дисторсию объектами.
В другом варианте осуществления, вызывающие дисторсию объекты (например, детектор или хирургический зонд) идентифицируются интраоперационно с использованием характерных признаков дисторсии. Посредством сравнения характерных признаков с базой данных и выполнения схемы оптимизации можно идентифицировать безошибочно инструмент или сочетание инструментов, который(ые) вызывает(ют) дисторсию. Систему вместе с предварительно откалиброванными датчиками, которые динамически измеряют ошибки, можно также применять для обнаружения присутствия неизвестных вызывающих дисторсию объектов и выставления флага, если обнаружен неизвестный источник. Способность инструмента вызывать дисторсии в ЭМ поле варьируется и зависит от его размера, формы и материала, из которого состоит данный инструмент. Каждый вызывающий дисторсию объект имеет однозначно определяемую дисторсионную морфологию, например, известно, что картины дисторсии от детектора C-образной консоли значительно отличаются от картин дисторсии от абляционного катетера. Создается база данных, которая хранит характерные признаки дисторсии от различных известных объектов. Разреженный набор предварительно откалиброванных ЭМ датчиков применяют для вычисления предполагаемой дисторсии в «невозмущенной» окружающей среде, в сравнении с динамической дисторсией, вызываемой на датчиках во время процедуры. Схему оптимизации применяют, чтобы идентифицировать присутствие, по меньшей мере, одного вызывающего дисторсию объекта в ЭМ поле посредством вычисления составляющих ошибки в точках измерения. Величину ошибки от предполагаемых вызывающих дисторсию объектов можно отличать в суммарной дисторсии, чтобы определять, присутствует ли известный вызывающий дисторсию объект в поле. Если обнаруживаются дисторсии, обусловленные неизвестными, вызывающими дисторсию объектами, то выставляется флаг или предупреждение.
В еще одном варианте осуществления, характерные признаки дисторсии используют для определения характеристик дисторсионной морфологии известных объектов. После первоначальной калибровки, настоящую систему, вместе с предварительно откалиброванными датчиками, которые динамически измеряют ошибки, может применять для идентификации и определения местоположения вызывающего дисторсию объекта. Все вызывающие дисторсию объекты имеют однозначно определяемую морфологию и изменяющуюся дальность действия, до которой вызывающий дисторсию объект создает дисторсию (вследствие изменяющейся морфологии). Упомянутые переменную дальность действия и переменную дисторсионную морфологию можно использовать для интраоперационного определения местоположения вызывающего дисторсию элемента. Для вычисления составляющей ошибки можно использовать разреженный набор предварительно откалиброванных ЭМ датчиков, предполагаемую дисторсию в «невозмущенной» окружающей среде и динамическую дисторсию, вызываемую на датчиках во время процедуры. Предварительная вычисленная морфология вызывающего дисторсию объекта (например, детектора) характеризуется своей «составляющей» ошибки, вычисленной в точках измерения. Если составляющая превышает приемлемый порог, то может быть выставлено предупреждение. Величину ошибки, обусловленной «предполагаемыми», вызывающими дисторсию объектами, можно отличить от величины ошибки от суммарной дисторсии.
Следует понимать, что последующее описание настоящего изобретения приведено на примере медицинских инструментов; однако, идеи настоящего изобретения намного шире и применимы к любым инструментам, применяемым при слежении или анализе комплексных биологических или механических систем. В частности, принципы настоящего изобретения применимы к процедурам слежения внутри биологических систем, процедурам во всех зонах тела, например, в легких, желудочно-кишечном тракте, выделительных органах, кровеносных сосудах и т.п. Элементы, изображенные на Фиг., могут быть выполнены путем различных сочетаний аппаратного обеспечения и программного обеспечения и могут обеспечивать функции, которые могут быть объединены в единственном элементе или нескольких элементах.
Функции различных элементов, показанных на чертеже, могут быть обеспечены применением специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного выполнять программное обеспечение, в связи с подходящим программным обеспечением. При обеспечении процессором, функции могут обеспечиваться единственным специализированным процессором, единственным совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми. Кроме того, использование в явной форме термина «процессор» или «контроллер» не следует истолковывать как относящийся исключительно к аппаратному обеспечению, способному выполнять программное обеспечение, и может в неявной форме включать в себя, без ограничения, аппаратное обеспечение цифрового сигнального процессора («DSP"), постоянную память («ROM») для хранения программного обеспечения, оперативную память («RAM»), энергонезависимое запоминающее устройство и т.п.
Кроме того, все формулировки в настоящем документе, перечисляющие принципы, аспекты и варианты осуществления изобретения, а также его конкретные примеры, предназначены для охвата как конструктивных, так и функциональных эквивалентов изобретения. Кроме того, предполагается, что упомянутые эквиваленты включают в себя как известные в настоящее время эквиваленты, так и эквиваленты, которые будут разработаны в будущем (т.е. элементы, разработанные для выполнения одной и той же функции, независимо от конструкции). Таким образом, например, специалистам в данной области техники будет очевидно, что блок-схемы, представленные в настоящем документе, изображают концептуальные представления наглядных системных компонентов и/или схем, осуществляющих принципы изобретения. Аналогично, следует понимать, что любые схемы последовательности операций, структурные схемы и т.п. представляют различные процессы, которые могут быть, по существу, представлены на машиночитаемом носителе данных и поэтому выполнены компьютером или процессором, независимо от того, показан ли в явной форме или нет упомянутый компьютер или процессор.
Кроме того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, доступного с компьютерного или машиночитаемого носителя данных, обеспечивающего программный код для использования или в связи с компьютером или любой системой выполнения команд. В целях настоящего описания, компьютерный или машиночитаемый носитель данных может быть любым устройством, которое может содержать, хранить, передавать, распространять или транспортировать программу для использования или в связи с системой, устройством или средством выполнения команд. Носитель может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или устройством или средством) или средой распространения. Примеры машиночитаемого носителя содержат полупроводниковую или твердотельную память, магнитную ленту, съемную компьютерную дискету, оперативную память (RAM), постоянную память (ROM), жесткий магнитный диск и оптический диск. Текущие примеры оптических дисков содержат компакт-диск, а именно, компакт-диск только для считывания (CD-ROM), перезаписываемый компакт-диск (CD-R/W) и DVD (цифровой видеодиск).
На чертежах, на которых одинаковые номера позиций представляют одинаковые или сходные элементы, и, вначале, на Фиг. 1 наглядно показана система 100 для выполнения медицинской процедуры. Система 100 может содержать рабочую станцию или пульт 112, с которой(ого) контролируют процедуру и управляют ей. Рабочая станция 112 может также содержать устройство для сбора ЭМ морфологий для определения характеристик вызывающих ЭМ дисторсию объектов. В предпочтительном варианте, рабочая станция 112 содержит, по меньшей мере, один процессор 114 и память 116 для хранения программ и приложений. Память 116 может хранить модуль 115 ЭМ измерений, сконфигурированный с возможностью интерпретации сигналов обратной связи из устройства 104 ЭМ измерений/слежения. В одном варианте осуществления, модуль 115 измерений сконфигурирован с возможностью использования обратной связи по ЭМ сигналу из устройства 104 ЭМ измерения для реконструкции ЭМ пространства и слежения медицинских инструментов или устройств 102. Медицинское устройство или инструмент 102 может содержать инструмент, содержащий датчик 104 ЭМ слежения, смонтированный на или в упомянутом инструменте. Устройство 102 может содержать, например, катетер, проволочный направитель, эндоскоп, зонд, робототехническое устройство, электрод, фильтрующее устройство, баллонное устройство или другой медицинский компонент и т.п. Рабочая станция 112 может содержать дисплей 118 для наблюдения внутренних изображений объекта обследования, если применена система 110 визуализации. Система 110 визуализации может содержать, например, систему магнитно-резонансной томографии (МРТ), флуороскопическую систему, систему компьютерной томографии (КТ), систему ультразвуковых исследований (УЗИ) и т.п. Дисплей 118 может также давать пользователю возможность взаимодействия с рабочей станцией 112 и ее компонентами и функциями. Данная возможность дополнительно поддерживается интерфейсом 120, который может содержать клавиатуру, мышь, джойстик или любое другое периферийное или управляющее устройство, чтобы допускать взаимодействие пользователя с рабочей станцией 112. Дисплей 118 может также предоставлять пользователю возможность наблюдения карт ошибок, предупреждений об опасности, характерных признаков дисторсии и т.п.
В предпочтительном варианте, генератор 124 поля предпочтительно устанавливают вблизи пациента или заданного объема 150 таким образом, чтобы генератор и ЭМ датчик или датчики 104 пребывали в одной и той же окружающей среде. В предпочтительном варианте, устройство 104 измерения содержит, по меньшей мере, одну катушку, которую используют для обнаружения изменений в ЭМ поле вследствие их перемещения. Таким образом, катушки датчиков 104 дают возможность слежения инструмента или устройства 102 относительно пациента и/или объема 150 слежения.
Как изложено выше, металлические объекты и электронное оборудование могут создавать дисторсии в локальных магнитных полях и влиять на показания ЭМ датчиков 104. Принципы настоящего изобретения предусматривают обеспечение модуля 140 коррекции ЭМ измерений, который может содержать, по меньшей мере, одну функциональную возможность для уменьшения дисторсий в окружающей среде в окрестности объема 150 слежения. Модуль 140 сконфигурирован с возможностью определения характеристик дисторсий, например, в виде результата измерения сигнатуры или характерных признаков дисторсии поля, созданной инструментами или объектами внутри или вблизи заданного объема 150. Определение характеристик упомянутых характерных признаков выполняют перед любой процедурой, и характерные признаки или дисторсионные морфологии сохраняют в базе 142 данных, в которой характерные признаки, измеряемые в реальном времени, коррелируют с идентификационными данными объектов, которые создали характерные признаки. Модуль 140 сконфигурирован с возможностью обеспечения, по меньшей мере, одной из следующих задач: идентификацию вызывающих дисторсию объектов, оптимизацию или фильтрацию существующих дисторсий для более точного слежения или измерения ЭМ излучения, определение изменения в ЭМ поле, предупреждение об изменениях ЭМ поля и т.п. Упомянутые функции более подробно поясняются далее в настоящем описании. Модуль 140 может учитывать и сохранять информацию в базе 142 данных, которая может содержать участок памяти 116. База 142 данных может хранить сигнатуры вызывающих дисторсию элементов в окружающей среде или может хранить сигнатуры для обычных инструментов и/или инструментов, применяемых в окружающей среде.
Систему 100 можно обучать, когда модуль 140 используют для определения характеристик дисторсионной морфологии (или дальности действия) любого известного объекта. Характеристики каждого объекта определяют для измерения его сигнатуры или характерных признаков таким образом, чтобы упомянутый объект можно было идентифицировать в более общих ЭМ полях. Определение характеристик можно выполнять изолировано или отдельно от применения системы 100 для более точного ЭМ слежения устройства во время процедуры. В одном примере, для определения характеристик пространства применяют робототехническое устройство 130 с ЭМ датчиком(ами) 146. Робототехническое устройство 130 можно перемещать в окрестности заданного объема 150 или окружающей среды, как указано координатами 148, для измерения ЭМ полей в области. Робототехническое устройство 130 можно использовать для определения характеристик фоновых ЭМ полей (невозмущенной окружающей среды) в качестве исходного эталона, а также для определения характеристик полей в окрестности объектов, применяемых во время процедуры. Данные, собранные робототехническим устройством 130, можно использовать для определения характеристик инструментов, имеющих отношение к дисторсионным морфологиям, сохраняемым в базе 142 данных. Во время процедуры, робототехническое устройство 130 можно использовать для измерения динамических изменений в ЭМ поле. Робототехническое устройство 130 может не потребоваться во время процедуры, если начальное определение характеристик будет выполняться заблаговременно.
В окружающей среде, предварительно откалиброванные датчики 144 можно также использовать для динамического измерения ошибок. Упомянутые датчики 144 расположены в виде матрицы или решетки и могут применяться в процессе определения характеристик с робототехническим устройством 130 или без него и/или во время процедуры, чтобы обеспечивать ЭМ измерения для вызывающих дисторсию объектов с робототехническим устройством 130 или без него. Составляющую от вызывающих дисторсию объектов можно измерять датчиками 144 для определения их составляющей в суммарной ошибке. Приблизительное местоположение вызывающего дисторсию объекта также можно оценивать интраоперационно по упомянутой составляющей ошибки.
В другом варианте осуществления, датчики 144 можно применять для формирования карт ошибок с использованием модуля 140. Карты ошибок можно обеспечивать для всего объема слежения с использованием методов опознавания характерных признаков дисторсии, которые обеспечивают идентификационные данные и местоположение известных вызывающих дисторсию объектов в окружающей среде. Карты ошибок обеспечивают интраоперационные виды областей с незначительной и значительной ошибкой. Карты могут обновляться с учетом изменения ошибок в реальном времени, чтобы указывать, например, визуализировать ошибки по мере того, как инструмент перемещается в объеме слежения. Динамические изменения морфологии ошибки для инструмента или другого инструмента, создающего дисторсию, можно отслеживать для всей карты ошибок посредством применения устройства слежения типа ЭМ датчика на инструменте с целью слежения его местонахождения. Ошибки, обнаруженные и отображенные в виде карты, можно скорректировать для известных вызывающих дисторсию объектов.
В другом варианте осуществления, база 142 данных хранит характерные признаки, которые характеризуют дисторсионную морфологию любого известного объекта или устройства. Предварительно откалиброванные датчики 144 сравнивают предполагаемые дисторсии в невозмущенной окружающей среде (исходным эталоном) с динамически измеренными ошибками во время процедуры. Вызывающие дисторсию объекты или сочетание вызывающих дисторсию объектов и их составляющую в суммарной ошибке идентифицируют. Обнаруживают присутствие любых неизвестных вызывающих дисторсию объектов. В случае, если обнаруживается новая дисторсия, на дисплее 118 или на интерфейсе 120 может быть показано предупреждение.
Дополнительно может быть обеспечена система 110 визуализации для сбора дооперационных данных визуализации или интраоперационных данных визуализации в реальном времени. Дооперационная визуализация может быть выполнена в другом учреждении, местоположении и т.п., перед любой процедурой. Изображения 111 могут сохраняться в памяти 116 и могут содержать объемы дооперационных 3-мерных изображений заданного объема 150, при необходимости.
На Фиг. 2, в продолжение изображения на Фиг. 1, представлена для пояснения блок-схема последовательности операций способа определения характеристик вызывающих дисторсию объектов, например, инструментов, инструментов или устройств, для создания характерных признаков или ЭМ сигнатуры, соответствующих(ей) вызывающим дисторсию объектам. В предпочтительном варианте, характерные признаки используют для оценки местоположения и ориентации вызывающих дисторсию объектов. На этапе 202 определяют характеристики (характерные признаки) дисторсионной морфологии (или дальности действия) любого известного объекта. ЭМ сигнатуры формируют с использованием ЭМ генератора 124 для создания поля, которое дисторсионно искажается объектом. На Фиг. 3 наглядно показаны примеры дисторсий 250 поля, вызванных ножницами 240, абляционным зондом 242 и детектором 244 C-образной консоли для рентгеновской установки. На этапе 204, ошибки в ЭМ полях интраоперационно измеряют с использованием датчиков 144 (и/или робототехнического устройства 130). На Фиг. 4 наглядно показана карта 248 ошибок для ЭМ пространства в «невозмущенной» окружающей среде. Невозмущенная окружающая среда представляет исходное базовое ЭМ поле в отсутствие вызывающих дисторсию объектов. На этапе 206, измеренную ошибку в невозмущенной окружающей среде сравнивают с суммарной ошибкой (ошибкой, сложенной всеми источниками) в присутствии, по меньшей мере, одного вызывающего дисторсию объекта. Ошибку, измеренную во время процедуры (динамическую, со всеми дисторсиями, например, возникающими от детектора, стола, инструмента и т.п.), сравнивают с результатом измерения, полученным в «невозмущенной окружающей среде» (при отсутствии дисторсий). Разность между упомянутыми двумя картами ошибок позволяет найти долю суммарной ошибки, которая обусловлена вызывающим дисторсию объектом.
Составляющую от каждого вызывающего дисторсию объекта можно идентифицировать в суммарной ошибке на этапе 208. По упомянутой составляющей ошибке можно также оценить приблизительные местоположение и ориентацию вызывающего дисторсию объекта на этапе 210. На Фиг. 5 показаны ножницы 240 в ЭМ окружающей среде в окрестности детектора 244 C-образной консоли 244. Сигнатуру ножниц и сигнатуру детектора можно идентифицировать в суммарной сигнатуре 249 ЭМ поля посредством вычитания исходных данных (248) из измеренной ошибки и сравнения остающейся сигнатуры с дисторсионными морфологиями, хранящимися в базе (142) данных.
Таким образом, внутри ЭМ поля можно идентифицировать металлические, вызывающие дисторсию объекты (подобные хирургическому инструменту) или электронные устройства, которые вызывают ошибку при ЭМ слежении. Если тип дисторсии известен, то система может определить позицию и ориентацию вызывающего дисторсию инструмента. При данном подходе можно учитывать вызывающий дисторсию объект и более точно выполнять измерения при ЭМ слежении или идентифицировать и совсем исключать вызывающий дисторсию объект из окружающей среды.
На Фиг. 6 представлена другая система 200 для определения характеристик объектов в соответствии с одним наглядным вариантом осуществления. Предполагается, что возможно применение рабочей станции 112, изображенной на Фиг. 1. Однако, для определения характеристик ЭМ дисторсионных морфологий можно использовать отдельную установку (систему 200). Как показано на Фиг. 1, в составе системы содержатся система ЭМ слежения, содержащая пульт, датчики и генератор поля, и применяется также блок управления (например, компьютер) для выполнения обработки данных в реальном времени. Для записи характерных признаков дисторсии от различных инструментов применяют, предпочтительно, 3-мерную решетку 270 ЭМ датчиков. Данная решетка 270 датчиков может быть обеспечена в фиксированном местоположении вблизи области или заданного объема, в котором применяют ЭМ слежение, или решетка 270 датчиков может быть закреплена на робототехническом устройстве или другом механизме 272 и перемещаться, при необходимости.
Робототехническое устройство 272 может быть оборудовано ЭМ датчиками 274. Робототехническое устройство 272 способно пересекать 3-мерное пространство для записи характерных признаков дисторсии от различных инструментов. Металлические хирургические инструменты или электронные устройства 276, подобные тем, которые могут находиться в лаборатории интервенционных диагностики и лечения, могут быть подсоединены или размещены в заданной области вблизи робототехнического устройства 272. Робототехническое устройство 272 перемещают в любом направлении для сбора данных ЭМ сигнатуры (характерных признаков) для (невозмущенной) окружающей среды и/или окружающей среды с находящимся в ней вызывающим дисторсию объектом (например, детектором 282). Рентгеновский блок 280, в частности, с C-образной консолью 278 обеспечен в данном примере для записи характерных признаков ее дисторсии, когда C-образная консоль 278 находится в разных ориентациях и при разных расстояниях источник-изображение (SID).
В одном варианте осуществления, для выполнения измерений поля можно применить набор ЭМ датчиков, расположенных в 3-мерном пространстве в ЭМ поле в форме решетки 270. Данный набор может заменять или дополнять использование робототехнического устройства 272. Инструмент 276 или множество различных металлических инструментов, выполненных из разных материалов, которые вызывают дисторсию ЭМ поля, можно приближать к упомянутой схеме или решетке 270 датчиков, устанавливаемой в разных ориентациях и на разных расстояниях от решетки 270 датчиков, и характерные признаки дисторсий, обусловленные инструментом 276, можно изучать и сохранять в базе данных (142, Фиг. 1). Например, в одном случае, детектор 282 C-образной консоли 278 может быть инструментом, создающим дисторсию, и может быть размещен в известной позиции (на известном SID (расстоянии источник-изображение) и в известной ориентации, а именно, переднезадней (AP)), и схема 270 датчиков может быть установлена на столе пациента. В предположении, что позиция генератора (124, Фиг. 1) поля и высота стола пациента остаются теми же самыми, характерные признаки дисторсии, обусловленные детектором 282 C-образной консоли 278, при данных расстоянии и ориентации, могут быть сохранены и изучены системой 200. В другом примере, инструмент 276 может быть закреплен к робототехническому устройству 272 или другому устройству и охарактеризован посредством перемещения в поле, считываемом решеткой 270.
В другом варианте осуществления, вместо использования решетчатой схемы ЭМ датчиков в 3-мерном пространстве, которая требовала бы большого числа ЭМ датчиков, на робототехническом устройстве 272 можно установить, по меньшей мере, один ЭМ датчик 276 для слежения позиции. Робототехническое устройство 272 может пересекать 3-мерное пространство в ЭМ поле, и, если вызывающий дисторсию объект (а именно, детектор 282 C-образной консоли 278) располагается вблизи объема, пересекаемого робототехническим устройством 272, характерные признаки дисторсии можно изучать и сохранять с течением времени.
В дополнение или вместо установки, по меньшей мере, одного датчика на робототехническом устройстве 272, можно применять другие устройства слежения, которые включают в себя, по меньшей мере, что-то одно из оптического слежения с использованием пассивных меток, оптического слежения с использованием активных светоизлучающих диодов (СД), меток, использующих оптическое измерение формы на основе волоконных брэгговских решеток (FBG) или множества решеток FBG, оптическое измерение формы на основе картин преломления и/или рассеяния или обратного рассеяния, меток, которые могут быть видны средствами визуализации, например, меток на основе йода, которые видны при выполнении рентгеновской или флуороскопической визуализации, радиоактивных или рентгеноконтрастных меток, видимых для методов радионуклидной визуализации, подобных позитронной эмиссионной томографии (ПЭТ) и/или однофотонной эмиссионной компьютерной томографии (ОФЭКТ), меток, видимых при выполнении магнитно-резонансной томографии (МРТ), ультразвуковых или высокочастотных ультразвуковых исследований, компьютерной томографии (CT) или других способов визуализации.
В клинических условиях, если ЭМ слежение применяют для управляемой навигации, то систему 200 можно использовать для выполнения сравнений дисторсий в ограниченных позициях ЭМ датчиков, с дооперационными морфологиями или картинами, сохраненными в базе данных (142, Фиг. 1), чтобы идентифицировать инструмент, который вызывает дисторсию. Например, во время электрофизиологической процедуры, выполняемой в лаборатории интервенционных диагностики и лечения, показания ЭМ датчиков могут быть использованы системой 200 для идентификации дисторсий, которые внесены детектором 282 C-образной консоли 278, находящимся в непосредственной близости от пациента.
Систему можно применять для идентификации составляющей от вызывающего дисторсию объекта в суммарной ошибке посредством выполнения сравнений с дооперационными картинами, сохраненными в базе (142) данных. Например, если позиция и ориентация C-образной консоли 278 и расстояние детектора известны, то метод может идентифицировать ошибку, вызванную детектором 282, и сравнить данную ошибку с суммарной ошибкой. В клинических условиях, если источник дисторсии известен, то систему можно использовать для локализации источника упомянутой дисторсии. Другими словами, если инструмент, вызывающий дисторсии, является детектором 282 C-образной консоли 278, то позицию и ориентацию детектора 282 C-образной консоли 272 можно прогнозировать на основе сравнений с сохраненными характерными признаками дисторсий.
Опознавание характерных признаков дисторсии можно применять для обнаружения, идентификации и определения местоположения вызывающего дисторсию инструмента внутри объема слежения. Способы можно применять для создания карт предполагаемых ошибок для всего объема, с использованием информации о предполагаемых ошибках из невозмущенной окружающей среды и предварительно откалиброванных датчиков, которые идентифицировали и определили местоположение вызывающих дисторсию объектов, с добавлением, тем самым, их дисторсионных морфологий в карту суммарной ошибки.
На Фиг. 7 наглядно представлен способ создания карт ошибок. На этапе 302 формируют карту 303 предполагаемых ошибок в невозмущенной окружающей среде без вызывающих дисторсию объектов. На этапе 304 создают карты 305 ошибок для всего объема слежения с использованием методов опознавания характерных признаков дисторсии, которые обеспечивают идентификационные данные и местоположение известных вызывающих дисторсию объектов. На этапе 306, в невозмущенную карту 303 вводят дисторсионные морфологии, чтобы формировать суммарную карту 307 в реальном времени. Интраоперационно визуализируемая карта ошибок формируется с областями разной (незначительной и значительной) ошибки. При этом, обеспечивается карта 307 суммарных ошибок, которая объединяет данные датчиков из карты ошибок невозмущенной окружающей среды и дисторсионную морфологию вызывающих дисторсию объектов. Визуальное отображение ошибок обновляется в реальном времени по мере того, как инструмент (например, детектор 320) перемещается в объеме слежения, с изменением, тем самым, ошибок. Таким образом, морфологию ошибок от инструмента можно динамически вводить в полную картой ошибок, при наличии устройства слежения, подобного ЭМ датчику на инструменте (например, детекторе 320), с отслеживанием, тем самым, его местоположения. На этапе 308, на дисплее может быть обеспечен графический пользовательский интерфейс (GUI) для просмотра областей значительной и незначительной ошибок на карте 309 ошибок. Система 100 компенсирует ошибки, вносимые известными вызывающими дисторсию объектами, например, в данные измерений при ЭМ слежении.
Области значительной и незначительной ошибок визуализируют с использованием карт суммарных ошибок. Например, клиницисту может потребоваться просмотреть области с ошибкой менее 2 мм. Модуль 140 (Фиг. 1) разметит области, соответствующие незначительной ошибке (менее 2 мм) и отобразит их для клинициста на дисплее 118. Система 100 может вычислять и визуализировать карты ошибок в реальном времени, что делает карты доступными для интраоперационного использования, когда вызывающий дисторсию объект, подобный хирургическому инструменту, применяют и динамически перемещают в объеме интереса. В дополнительном варианте осуществления, датчик 322 слежения, например, ЭМ датчик или другой датчик, может быть размещен на известном инструменте, и его местоположение можно определять в реальном времени. Таким образом, сохраняемая в памяти дисторсионная морфология упомянутого инструмента может быть динамически введена в полную карту ошибок и интраоперационно визуализирована клиницистом. Кроме того, при наличии представления об ошибках, которые порождаются в объеме слежения известными вызывающими дисторсию объектами, формирование карт ошибок можно использовать для компенсации упомянутых известных ошибок, что повышает точность, а также уверенность клинициста, при выполнении процедуры.
Как показано на Фиг. 8, система 100 может выполнять другие задачи или функции, кроме тех, которые уже описаны. В соответствии с одним вариантом осуществления, предлагается способ предупреждения о неизвестных вызывающих дисторсию объектах в ЭМ поле. На этапе 402 формируют базу данных, как изложено выше, для хранения характерных признаков, которые характеризуют дисторсионную морфологию любого известного объекта или потенциально применяемого объекта во время процедуры. Данные, вводимые из базы данных (142, Фиг. 1), могут содержать различные, хранимые в памяти характерные признаки дисторсии, которые характеризуют дисторсионную морфологию известных инструментов. Упомянутое опознавание характерных признаков дисторсии будет выполняться способом, описанным выше и показанным в наглядных примерах на Фиг. 3. На этапе 404 используют предварительно откалиброванные датчики, чтобы сравнить предполагаемые дисторсии в невозмущенной окружающей среде с динамически измеренными ошибками во время процедуры. Предварительно откалиброванные датчики (144, Фиг. 1) могут содержать решетку датчиков для сравнения предполагаемых дисторсий в невозмущенной окружающей среде с динамически измеренными ошибками во время процедуры.
На этапе 406, вызывающий дисторсию объект или сочетание вызывающих дисторсию объектов анализируют и/или оптимизируют таким образом, чтобы их характерные признаки можно было сравнивать с базой данных для идентификации их составляющей в суммарной ошибке, которая измерена. Для выполнения сравнений дооперационных, сохраненных в памяти карт дисторсий с результатами измерений можно интраоперационно применять алгоритм/целевую функцию оптимизации. Оптимизация имеет целью поиск наилучшего совпадения морфологии дисторсий с базой данных и определение, обусловлена ли дисторсия известными или неизвестными вызывающими дисторсию объектами. Сравнения, поясняемые в настоящем описании, могут использовать растровые преобразования карт для карт ошибок, полей дисторсий и т.п. Для сравнений можно использовать значения пикселей изображений или визуальных воспроизведений. Упомянутые методы сравнения могут использовать известные способы для сравнения изображений и т.п.
На этапе 408, если имеет место совпадение измеренной дисторсии с сохраняемыми в памяти характерными признаками дисторсии, то идентификационные данные вызывающего дисторсию объекта возвращаются на этап 412. В противном случае, если дисторсия вызвана неизвестным источником, то выдается предупреждение (выставляется флаг). Обнаружение дисторсий, вызываемых некоторым неизвестным источником, будет показывать высокий коэффициент ошибок во время ЭМ слежения. Следует понимать, что систему 100 можно настраивать на обнаружение любого изменения картины дисторсии и выставления флага для любого изменения картины дисторсии (карты ошибок).
Приведенные функциональные возможности/способы, выполняемые системой 100, могут интраоперационно идентифицировать безошибочно инструмент или сочетание инструментов, который(ые) вызывает(ют) дисторсию в ЭМ поле. Система 100 может также обнаруживать присутствие неизвестных вызывающих дисторсию объектов во время ЭМ слежения и обеспечивать предупреждение. В результате, в ЭМ поле можно безошибочно идентифицировать инструмент или сочетание инструментов, который(ые) вызывает(ют) дисторсию.
Системы и способы, описанные в настоящей заявке, можно применять в процедурах для минимально инвазивной хирургии, которые используют методы ЭМ слежения, в частности, в области вмешательств и терапии под визуальным контролем. Однако, принципы настоящего изобретения можно применять к другим задачам в области медицины и в других областях, в которых возможно использование ЭМ слежения.
При интерпретации прилагаемой формулы изобретения, следует понимать, что:
a) формулировка «содержащий» не исключает присутствия других элементов или операций, кроме тех, которые перечислены в данном пункте формулы изобретения;
b) употребление элементов или операций в единственном числе не исключает их множества;
c) никакие позиции в формуле изобретения не ограничивают объем ее охраны;
d) несколько «средств» могут быть представлены одним и тем же элементом или одной и той же аппаратно или программно реализованной конструкцией или функцией; и
e) никакая конкретная последовательность операций не предполагает ее необходимости, если отсутствует специальное указание.
Выше приведено описание предпочтительных вариантов осуществления (которые, как предполагается, являются наглядным, а не ограничивающими) для опознавания характерных признаков дисторсии с целью компенсации, обнаружения и коррекции ошибок при ЭМ слежении, однако, следует отметить, что, с учетом вышеизложенных идей изобретения, специалистами в данной области техники могут быть созданы модификации и внесены отклонения. Поэтому, следует понимать, что в раскрытые конкретные варианты осуществления изобретения могут быть внесены изменения, которые находятся в пределах объема вариантов осуществления, раскрытых в настоящем описании, определяемого прилагаемой формулой изобретения. Выше приведено описание деталей и особенностей в соответствии с требованиями патентных законов, а заявляемый предмет изобретения, который требуется охранять патентом на изобретение, изложен в прилагаемой формуле изобретения.
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия

