Результат интеллектуальной деятельности: ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД
Вид РИД
Изобретение
Перекрестная ссылка на родственную заявку
[0001] По данной заявке испрашивается приоритет на основании предварительной заявки на патент США № 62/032173, озаглавленной "ELECTRIC BICYCLE" и поданной 1 августа 2014 г., содержимое которой полностью включено в данный документ путем ссылки.
Уровень техники
[0002] Транспортные средства, такие как автомобили, могут быть использованы для транспортировки других транспортных средств, таких как, например, велосипеды. Транспортное средство может быть использовано для транспортировки велосипеда, например, для использования велосипеда в рекреационных целях. В качестве другого примера, транспортное средство может быть использовано для транспортировки велосипеда, так что транспортное средство и велосипед обеспечивают многорежимное перемещение. Многорежимное перемещение может включать в себя движение на транспортном средстве до местоположения, в котором транспортное средство может быть припарковано, и затем движение на велосипеде от транспортного средства до конечного пункта назначения. Например, водитель может ехать в рабочий офис, расположенный в городской обстановке, перегруженной пользователями транспорта, сначала двигаясь на транспортном средстве до менее перегруженной пригородной парковки, удаленной от офиса, и затем двигаясь на велосипеде от транспортного средства до офиса. Велосипед может более простым и быстрым образом маневрировать в более перегруженных областях и с меньшими затратами для владельца и окружающей среды.
[0003] Велосипед включает в себя раму и педальный узел для механического кручения педалей велосипеда. В дополнение к механическому приводу посредством нажатия на педали, велосипед может быть электрическим велосипедом, который приводится в движение электрическим способом, например, посредством мощности аккумулятора. Соответственно, водитель может по выбору крутить педали электрического велосипеда или может ехать на электрическом велосипеде, когда электрический велосипед приводится в движение электрическим способом. Педали могут быть использованы, например, когда водитель стремится к физической нагрузке или когда аккумулятор разряжен. Электрический привод может быть использован, например, чтобы помогать крутить педали, когда водитель не хочет быть разгоряченным вследствие физической нагрузки от кручения педалей. Например, водитель может использовать велосипед с электрическим приводом, когда водитель едет на работу и не хочет вспотеть или смять свою одежду. В отношении электрического привода некоторые органы власти, например, Европейского Союза, требуют, чтобы водитель постоянно обеспечивал некоторую величину входного воздействия на педали, чтобы инициировать и поддерживать электрический привод. Эксплуатация электрического велосипеда, такая, что электрический привод велосипеда только помогает механическому приводу, т.е. электрический велосипед не может эксплуатироваться только посредством электрического привода, может называться педально-электрическим режимом.
[0004] Укладка велосипедов в транспортное средство или на него во время транспортировки создает трудности, особенно в относительно небольших транспортных средствах. Внутреннее пространство транспортного средства может быть переконфигурируемым, например, сиденья могут быть сложены, чтобы вмещать велосипед во внутреннее пространство транспортного средства. Однако, велосипед неблагоприятным образом занимает значительное внутреннее пространство транспортного средства и может неблагоприятным образом перемещаться в транспортном средстве во время неожиданного ускорения или замедления.
[0005] Велосипеды могут, в качестве альтернативы, храниться снаружи транспортного средства во время транспортировки. Например, на рынке автокомпонентов доступны багажники для установки на транспортные средства и поддержки одного или более велосипедов. Однако эти багажники на рынке автокомпонентов являются дорогостоящими для покупки. Сборка багажника с рынка автокомпонентов на транспортное средство и установка велосипеда на багажник также неблагоприятным образом отнимает время. Багажник и велосипед также нарушают воздушный поток вокруг транспортного средства во время поездки, тем самым, неблагоприятным образом снижая топливную экономичность транспортного средства.
[0006] Соответственно, остается потенциал для проектирования устройства для многорежимного перемещения, которое легко и компактно объединяется с транспортным средством.
Краткое описание чертежей
[0007] Фиг. 1 - это перспективный вид электрического велосипеда в разложенном положении;
[0008] Фиг. 2 - это перспективный вид электрического велосипеда в сложенном положении;
[0009] Фиг. 3 - это вид сбоку электрического велосипеда в разложенном положении и включающего в себя кожух, скрывающий подседельный штырь;
[0010] Фиг. 4 - это перспективный вид электрического велосипеда в сложенном положении с кожухом, скрывающим раму электрического велосипеда;
[0011] Фиг. 5A - это перспективный вид электрического велосипеда с рамой в сложенном положении и отсоединенным кожухом;
[0012] Фиг. 5B - это перспективный вид электрического велосипеда с кожухом, скрывающим раму в сложенном положении, и подседельным штырем, выдвинутым, чтобы функционировать в качестве ручки;
[0013] Фиг. 5C - это перспективный вид электрического велосипеда с подседельным штырем, убранным, чтобы быть скрытым в кожухе;
[0014] Фиг. 6 - это перспективный вид фрагмента переднего колеса и заднего колеса электрического велосипеда и электромагнита и магнита для блокирования рамы в сложенном положении;
[0015] Фиг. 7 - это схема системы помощи раскладыванию;
[0016] Фиг. 8 - это блок-схема способа функционирования системы помощи раскладыванию;
[0017] Фиг. 9 - это перспективный вид рамы в сложенном положении, раскрывающей петлю;
[0018] Фиг. 10A - это перспективный вид рамы в сложенном положении и частично срезанной, чтобы показать пружину, соединенную с петлей;
[0019] Фиг. 10B - это вид сбоку фрагмента рамы в разложенном положении с рамой, частично срезанной, чтобы показать пружину;
[0020] Фиг. 11A - это вид в поперечном разрезе фрагмента рамы в сложенном положении с рамой, частично срезанной, чтобы показать петлю и пружину;
[0021] Фиг. 11B - это вид в поперечном разрезе фрагмента рамы в разложенном положении с рамой, частично срезанной, чтобы показать петлю и пружину;
[0022] Фиг. 12 - это перспективный вид рамы, включающей в себя фиксатор;
[0023] Фиг. 13 - это снимок экрана системы наблюдения за сборкой;
[0024] Фиг. 14A - это перспективный вид фрагмента рамы в сложенном положении и включающей в себя запирающий элемент;
[0025] Фиг. 14B - это перспективный вид на фиг. 12A с запирающим элементом, зацепляющим раму;
[0026] Фиг. 15 - это перспективный вид фрагмента рамы в сложенном положении и включающей в себя гибкий кабель;
[0027] Фиг. 16 - это схема системы бесключевого замка;
[0028] Фиг. 17A - это перспективный вид электрического велосипеда с рамой в сложенном положении и покрытой кожухом и соединенной с точкой заряда через кабель;
[0029] Фиг. 17B - это перспективный вид фрагмента рамы в сложенном положении и запирающего элемента, разъединенного с кабелем на фиг. 17A;
[0030] Фиг. 17C - это перспективный вид фрагмента рамы в сложенном положении с запирающим элементом, запирающим кабель на раме;
[0031] Фиг. 18A - это перспективный вид штепселя электрического велосипеда, отсоединенного от точки зарядки;
[0032] Фиг. 18B - это перспективный вид штепселя на фиг. 15A, зафиксированного в точке зарядки;
[0033] Фиг. 19 - это схематичный вид приводного механизма электрического велосипеда;
[0034] Фиг. 20 - это перспективный вид фрагмента приводного механизма;
[0035] Фиг. 21 - это покомпонентный вид приводного механизма;
[0036] Фиг. 22 - это схематичный вид датчика положения приводного механизма;
[0037] Фиг. 23 - это блок-схема логики управления мощностью и рекуперацией;
[0038] Фиг. 24 - это блок-схема логики управления мощностью;
[0039] Фиг. 25 - это блок-схема логики управления мощностью и рекуперацией, содержащей логику управления мощностью;
[0040] Фиг. 26A - это схематичный вид электрического велосипеда, управляемого в дистанционном режиме;
[0041] Фиг. 26B - это схематичный вид электрического велосипеда, альтернативно управляемого в режиме транспортного средства и дистанционном режиме;
[0042] Фиг. 27 - это схематичный вид электрического велосипеда, эксплуатируемого в режиме заряда;
[0043] Фиг. 28 - это блок-схема, показывающая связь между электрическим велосипедом, транспортным средством и мобильным устройством;
[0044] Фиг. 29 - это блок-схема, показывающая связь между электрическим велосипедом, транспортным средством и мобильным устройством через систему стыковки;
[0045] Фиг. 30 - это блок-схема способа эксплуатации системы связи;
[0046] Фиг. 31 - это перспективный вид системы стыковки;
[0047] Фиг. 32 - это увеличенный вид фрагмента системы стыковки;
[0048] Фиг. 33 - это перспективный вид пользовательского интерфейса транспортного средства;
[0049] Фиг. 34 - это перспективный вид фрагмента внутреннего пространства транспортного средства;
[0050] Фиг. 35 - это перспективный вид внешней зарядной консоли;
[0051] Фиг. 36 - это перспективный вид электрического велосипеда, включающего в себя световые источники для освещения зоны вокруг электрического велосипеда;
[0052] Фиг. 37 - это схема системы тактильной обратной связи;
[0053] Фиг. 38 - это блок-схема способа функционирования системы тактильной обратной связи;
[0054] Фиг. 39 - это график, показывающий инициирование и продолжительность вибрации для различных условий генераторов вибрации рукояток руля электрического велосипеда;
[0055] Фиг. 40 - это схематичный вид работы системы помощи в уклонении в сторону электрического велосипеда;
[0056] Фиг. 41 - это вид в поперечном разрезе встроенного сигнального огня узла сиденья электрического велосипеда;
[0057] Фиг. 42 - это схема системы освещения;
[0058] Фиг. 43 - это поперечное сечение колеса электрического велосипеда;
[0059] Фиг. 44 - это схема системы регулировки сиденья;
[0060] Фиг. 45 - это перспективный вид первого варианта осуществления памяти подседельного штыря;
[0061] Фиг. 46 - это перспективный вид второго варианта осуществления памяти подседельного штыря;
[0062] Фиг. 47 - это перспективный вид третьего варианта осуществления памяти подседельного штыря; и
[0063] Фиг. 48 - это перспективный вид третьего варианта осуществления памяти подседельного штыря.
Осуществление изобретения
[0064] Со ссылкой на чертежи, на которых одинаковые номера указывают одинаковые части повсюду на нескольких видах, показан электрический велосипед 10. Как изложено дополнительно ниже, электрический велосипед 10 удобно объединяется с транспортным средством 12 для многорежимного перемещения. Другими словами, транспортное средство 12 может быть использовано для транспортировки электрического велосипеда 10 в желаемое местоположение, в котором электрический велосипед 10 может быть изъят из транспортного средства 12 и приводиться в движение к конечному пункту назначения.
[0065] В качестве одного примера, человек, который имеет офис в перегруженной городской обстановке, может ехать на транспортном средстве 12 до места парковки, удаленного от офиса, и ехать на электрическом велосипеде 10 от транспортного средства 12 до офиса. Электрический велосипед 10 может легче и быстрее маневрировать в загруженной городской обстановке. Пассажир, т.е. водитель, может крутить педали электрического велосипеда 10 в ручном режиме для физической нагрузки и/или в случае, когда электрический велосипед 10 не получает электропитание. Водитель может ехать на электрическом велосипеде 10 в режиме подачи электропитания, чтобы сберечь энергию организма и/или избегать потливости в рабочей одежде.
[0066] Со ссылкой на фиг. 1, электрический велосипед 10 включает в себя раму 14, узел 16 руля, соединенный с рамой 14, и узел 18 сиденья, соединенный с рамой 14. Переднее колесо 20 поддерживается рамой 14 и может быть соединено с узлом 16 руля для руления передним колесом 20. Заднее колесо 22 поддерживается рамой 14. Приводной механизм 24 соединяется по меньшей мере с одним из переднего колеса 20 и заднего колеса 22 для привода электрического велосипеда 10. Источник мощности, такой как аккумулятор 26 (показан на фиг. 28 и 29), соединяется с приводным механизмом 24 для электропитания приводного механизма 24. Электрический велосипед 10 включает в себя вычислительное устройство 28 (показанное на фиг. 28 и 29), т.е. контроллер, для управления приводным механизмом 24 и/или другими деталями электрического велосипеда 10.
[0067] Со ссылкой на фиг. 28 и 29, вычислительное устройство 28 может включать в себя любые подходящие компоненты. Например, как показано на фиг. 7, вычислительное устройство 28 может включать в себя процессор 31, запоминающее устройство 29 и т.д. С продолжающейся ссылкой на фиг. 28 и 29, мобильное устройство 48, например, мобильный телефон, планшет и т.д., может поддерживаться велосипедом 10 и может быть на связи с вычислительным устройством 28, как изложено дополнительно ниже. Мобильное устройство 48 может разъемным образом стыковаться с велосипедом 10, например, с помощью док-станции 21, как показано на фиг. 1 и 3.
[0068] Со ссылкой на фиг. 1-3, рама 14 включает в себя передний сегмент 30, например, первый сегмент 30, и задний сегмент 32, например, второй сегмент 32. Передний сегмент 30 поддерживает узел 16 руля, а задний сегмент 32 поддерживает узел 18 сиденья. Приводной механизм 24 может поддерживаться посредством заднего сегмента 32.
[0069] Передний сегмент 30 и задний сегмент 32, каждый, могут, например, включать в себя элемент поддержки колеса, зацепляющий переднее колесо 20 и заднее колесо 22. Элементы поддержки колес могут быть единой балкой, протягивающейся по одной стороне переднего колеса 20 и/или заднего колеса 22, как показано на фиг. 1. В такой конфигурации переднее колесо 20 и заднее колесо 22 могут быть помещены между элементами поддержки колес, когда рама 14 находится в сложенном положении, как показано на фиг. 2 и 6. В качестве альтернативы, элементы поддержки колес могут быть вилкой, протягивающейся по обеим сторонам переднего колеса 20/заднего колеса 22.
[0070] Рама 14 является складной, как показано на фиг. 1-4, например. В частности, рама 14 является складной, например, поворачиваемой, между разложенным положением, как показано на фиг. 1 и 3, и сложенным положением, как показано на фиг. 2 и 4. Передний сегмент 30 и задний сегмент 32 могут быть разъемным образом соединены друг с другом для перемещения между сложенным и разложенным положениями.
[0071] В качестве одного примера, который показан на фиг. 9, петля 34 может соединять передний сегмент 30 и задний сегмент 32. Петля 34 выполнена с обеспечением возможности переднему сегменту 30 и заднему сегменту 32 поворачиваться вокруг петли 34 между сложенным положением и разложенным положением. Петля 34 может, например, обеспечивать возможность поворота на 180 градусов между передним сегментом 30 и задним сегментом 32 между сложенным положением и разложенным положением. Однако передний сегмент 30 и задний сегмент 32 могут быть разъемным образом соединены друг с другом любым подходящим образом.
[0072] Петля 34 может быть потайной петлей, т.е. петля 34 может быть скрыта между передним сегментом 30 и задним сегментом 32, когда рама 14 находится в разложенном положении. Передний сегмент 30 и/или задний сегмент 32 могут определять карман 35 для размещения петли 34, когда рама 14 находится в разложенном положении. Например, петля 34 может быть петлей Сосса, как показано на фиг. 9. Альтернативно, петля 34 может быть любым подходящим типом петли, таким как двухстворчатая петля, шарнирная петля и т.д.
[0073] Со ссылкой на фиг. 9, петля 34 может включать в себя первый кронштейн 58, соединенный с передним сегментом 30, и второй кронштейн 59, соединенный с задним сегментом 32. Первый кронштейн 58 и второй кронштейн 59 соединяются посредством первого набора 60 пластин и второго набора 61 пластин. Первый набор пластин 60 и второй набор пластин 61 соединяются с возможностью поворота друг с другом и соединяются с возможностью поворота с первым кронштейном 58 и вторым кронштейном 59. Первый кронштейн 58 и/или второй кронштейн 59 могут определять карман 35.
[0074] Со ссылкой на фиг. 3-5C, электрический велосипед 10 может включать в себя кожух 36 для заключения в него по меньшей мере фрагмента рамы 14, когда рама 14 находится в сложенном положении. Кожух 36 может поддерживаться посредством рамы 14, когда электрический велосипед 10 находится в разложенном положении. Как показано на фиг. 3, например, кожух 36 может принимать фрагмент узла 18 сиденья, когда электрический велосипед 10 находится в разложенном положении. В такой конфигурации электрический велосипед 10 может эксплуатироваться с кожухом 36 на узле 18 сиденья.
[0075] Кожух 36 может включать в себя две боковины 38, как лучше показано на фиг. 4. Две боковины 38 могут сцепляться друг с другом, например, посредством пружинного прижима, защелки, крепежных деталей и т.д. Альтернативно, или в дополнение, две боковины 38 могут зацеплять раму 14 и/или узел 18 сиденья, чтобы удерживать кожух 36 на раме 14.
[0076] Как показано на фиг. 5A-C, кожух 36 является подвижным, чтобы раскрывать/закрывать по меньшей мере фрагмент рамы 14. Например, как показано на фиг. 5A, две боковины 38 могут быть отсоединены друг от друга, и узел 18 сиденья, например, снимается с остальной части велосипеда 10. Когда две боковины 38 сняты, рама 14 может быть перемещена в сложенное положение.
[0077] Альтернативно по меньшей мере две боковины 38 могут скользящим образом зацеплять рельсовую направляющую (не показана) на раме 14 и/или узле 18 сиденья для направления кожуха 36 между положением, покрывающим узел 18 сиденья, как показано на фиг. 3, и положением, покрывающим раму 14, как показано на фиг. 4. В таком варианте осуществления рама 14 может быть перемещена в сложенное положение, когда две боковины 38 находятся в положении, покрывающем узел 18 сиденья, и две боковины 38 могут впоследствии быть перемещены в положенин, покрывающее раму 14. Одна из двух боковин 38 может быть установлена на пружине на рельсовую направляющую, т.е. выполнена с возможностью упругого перемещения от рельсовой направляющей, в то же время удерживаясь на рельсовой направляющей. Другая боковина 38 может быть установлена на пружине на боковину 38, которая установлена на пружине на рельсовую направляющую.
[0078] Две боковины 38 могут быть жесткими. Например, две боковины 38 могут быть сформированы из подходящего композита, такого как стекловолокно, углеродное волокно и т.д., и/или могут быть сформированы из подходящего металла и/или пластмассы.
[0079] Со ссылкой на фиг. 5C, кожух 36 может включать в себя по меньшей мере один промежуточный элемент 40, протягивающийся между двумя боковинами 38. Промежуточный элемент 40 может быть гибким относительно боковин 38. Промежуточный элемент 40, например, может быть сформирован из неопрена или любого другого подходящего материала. Промежуточный элемент 40 может быть разъемным образом зацеплен с боковинами 38. Например, промежуточный элемент 40 может быть соединен с боковинами с помощью застежки-молнии, защелок, застежек "липучек" и т.д.
[0080] Как показано на фиг. 5A, две боковины кожуха 36 перемещаются друг от друга, чтобы отцеплять две боковины от узла рукояток. Две боковины могут перемещаться друг от друга, после того как рама 14 перемещается в сложенное положение, как показано на фиг. 5A, или, альтернативно, рама 14 может быть перемещена в сложенное положение, после того как две боковины заключают в оболочку раму 14 в сложенном положении. В другом варианте осуществления рама 14 может быть перемещена в сложенное положение, после того как две боковины кожуха 36 перемещаются в сложенное положение.
[0081] Как показано на фиг. 5B, две боковины 38 перемещаются в положение, заключающее в оболочку по меньшей мере фрагмент рамы 14 в сложенном положении. В этом положении две боковины 38 могут зацеплять друг друга и/или раму 14, чтобы удерживать кожух 36 относительно рамы 14. Как показано на фиг. 5C, узел 18 сиденья может быть убран в кожух 36, и промежуточный элемент 40 может быть развернут между боковинами 38.
[0082] Со ссылкой на фиг. 6, одна из опор переднего сегмента 30 и заднего сегмента 32, например, фиксирована относительно магнита 42, например, постоянного магнита, а другая из опор переднего сегмента 30 и заднего сегмента 32, например, фиксирована относительно электромагнита 44, выровненного с магнитом 42, когда рама 14 сложена. Магнит 42 и электромагнит 44 могут быть прикреплены к элементам поддержки колеса переднего сегмента 30 и заднего сегмента 32 и/или могут быть неподвижными ступицами колеса переднего сегмента 30 и заднего сегмента 32.
[0083] Как показано на фиг. 7, электромагнит 44 является компонентом системы 47 помощи раскладыванию, которая может быть выполнена с возможностью раскладывания рамы 14 из сложенного положения в разложенное положение. Электромагнит 44 соединяется с источником мощности электрического велосипеда 10, например, аккумулятором 26, так что электропитание для электромагнита 44 может быть включено и выключено. Другими словами, когда питание подается к электромагниту 44, электромагнит 44 излучает отталкивающее магнитное поле, а когда питание не подается к электромагниту 44, электромагнит 44 не излучает магнитное поле. Переключатель (показанный на фиг. 7), например, может быть на связи с электромагнитом 44, чтобы включать и выключать электромагнит 44.
[0084] Электромагнит 44 включает сердечник, сформированный из ферромагнитного материала, такого как железо, и провода, намотанного вокруг сердечника. Когда питание подается к проводу, электромагнит 44 излучает магнитное поле. Магнит 42 и электромагнит прикрепляются к переднему сегменту 30 и заднему сегменту 32 так, что одинаковые полюса магнита 42 и электромагнита 44 обращены друг к другу, когда рама 14 сложена. Например, серверный полюс магнита обращен к серверному полюсу электромагнита 44, или южный полюс магнита 42 обращен к южному полюсу электромагнита 44, когда рама 14 находится в сложенном положении.
[0085] Электромагнит 44 располагается в магнитом поле магнита 42, когда рама 14 находится в сложенном положении. Когда рама 14 находится в сложенном положении, и электромагнит 44 выключен, магнит 42 притягивает сердечник электромагнита 44, чтобы удерживать раму 14 в сложенном положении. Когда рама 14 находится в сложенном положении, и электромагнит 44 включен, электромагнит 44 излучает магнитное поле, и, поскольку одинаковые полюса магнита 42 и электромагнита 44 совмещены, магнит 42 отталкивает электромагнит 44, чтобы помогать в открытии рамы 14 в разложенное положение. Например, когда рама 14 находится в сложенном положении, электромагнит 44 может быть включен, чтобы инициировать перемещение в разложенное положение без дополнительного ручного входного воздействия от пользователя.
[0086] С продолжающейся ссылкой на фиг. 7, контроллер 73, например, вычислительное устройство 28, может быть выполнено с возможностью питания энергией электромагнита 44, чтобы отталкивать магнит 42, чтобы раскладывать раму 14. В частности, контроллер 73, например, вычислительное устройство 28, может быть соединено с источником мощности, например, аккумулятором 26, и контроллер 73 может выборочно соединять источник мощности с электромагнитом 44, чтобы снабжать энергией электромагнит 44. Например, переключатель 45 может быть соединен с источником мощности, например, аккумулятором 26, и с контроллером 73, например, вычислительным устройством 28. Контроллер 73, например, вычислительное устройство 28, может быть запрограммировано, чтобы замыкать переключатель 45, чтобы снабжать энергией электромагнит 44.
[0087] Подача электропитания к электромагниту 44 может управляться с помощью авторизованного паспорта безопасности. Паспорт безопасности может быть электронным устройством, например, мобильным устройством 48, таким как мобильный телефон, планшет и т.д., которое связывается с электрическим велосипедом 10, чтобы идентифицировать авторизованное использование. Паспорт безопасности может быть ключом (не показан), таким как механический ключ или беспроводной ключ, таким как RFID-ключ. Паспорт безопасности может быть задействован посредством биометрического индикатора, такого как сканер отпечатка пальца, сканер радужной оболочки глаза и т.д. По существу, электромагнит 44 может быть задействован в качестве устройства безопасности, чтобы предотвращать неавторизованное использование, т.е. электромагнит 44 может быть выборочно задействован в качестве системы безопасности, чтобы предотвращать раскладывание рамы 14 кем-то помимо авторизованного пользователя.
[0088] Контроллер может быть запрограммирован, чтобы предотвращать подачу электропитания к электромагниту 44 в отсутствие обнаружения паспорта безопасности. Например, контроллер 73, например, вычислительное устройство 28, может быть запрограммирован, чтобы предотвращать подачу электропитания к электромагниту 44 в отсутствие обнаружения предварительно идентифицированного мобильного устройства 48, например, мобильного телефона. В качестве другого примера, контроллер 73, например, вычислительное устройство 28, может быть запрограммировано, чтобы предотвращать подачу электропитания к электромагниту в отсутствие обнаружения беспроводного устройства неконтактного действия, например, беспроводного идентификатора близости в брелоке для ключей.
[0089] Буферный слой 46 может быть установлен на магнит 42 и/или электромагнит 44. Буферный слой 46 может быть сформирован из неферромагнитного материала, такого как пластик. Буферный слой 46 располагается между магнитом 42 и электромагнитом 44, когда рама 14 находится в сложенном положении. Буферный слой 46 предохраняет магнит 42 от полного зацепления сердечника электромагнита 44, что будет делать отталкивание невозможным, когда электромагнит 44 снабжается энергией.
[0090] Со ссылкой на фиг. 10A-12, петля 34 может быть подпружинена, чтобы помогать в перемещении рамы 14 из сложенного положения в разложенное положение и удерживать раму 14 в разложенном положении, в то время как пользователь блокирует раму 14 в разложенном положении. Например, пружина 57 может быть выполнена с возможностью отклонения рамы 14 вокруг петли 34 в разложенное положение.
[0091] В частности, петля 34 может включать в себя стержень 62, соединенный с первым набором 60 пластин и протягивающийся от первого набора 60 через первый кронштейн 58 к свободно висящему концу 63. Колпачок 65 может быть прикреплен к стержню 62 рядом со свободно висящим концом 63. Пружина 57 удерживается на стержне 62 между колпачком 65 и первым кронштейном 58. Колпачок 65 может быть сцеплен резьбовым образом со стержнем 62 для регулировки вдоль стержня 62, чтобы изменять натяжение на пружине 57.
[0092] Со ссылкой на фиг. 10A-10B, когда рама 14 перемещается из разложенного положения в сложенное положение, первый кронштейн 58 и второй кронштейн 59 перемещаются по направлению друг к другу, и первый набор 60 пластин и второй набор 61 пластин перемещаются относительно друг друга и относительно первого кронштейна 58 и второго кронштейна 59. Когда первый набор 60 пластин перемещается относительно первого кронштейна 58, первый набор 60 пластин толкает стержень 62 сквозь первый кронштейн 58, чтобы сжимать пружину 57 между колпачком 65 и первым кронштейном 58. Сжатие пружины 57 между колпачком 65 и первым кронштейном 58 подгоняет раму 15, посредством первого набора 60 пластин, в разложенное положение.
[0093] Со ссылкой на фиг. 12, фиксатор 54 может удерживать раму 14 в сложенном положении. Например, фиксатор 54 может выборочно запирать и передний сегмент 30, и задний сегмент 32 в сложенном положении, чтобы предотвращать относительное перемещение между первым сегментом 30 и задним сегментом 32 в разложенное положение. Процесс раскладывания может происходить после того, как пользователь освобождает фиксатор 54. Когда фиксатор 54 освобожден, пружина 57 может быть выполнена с возможностью инициирования процесса раскладывания рамы 14. После раскладывания пользователь может затем задействовать хомут (не показан), чтобы ограничивать велосипед 10 в разложенном положении. После того как хомут был задействован, пользователь может садиться на электрический велосипед 10.
[0094] В другом варианте осуществления торсионная пружина (не показана) может соединять передний сегмент 30 и задний сегмент 32 для помощи перемещению между сложенным и разложенным положениями. После того как рама 14 находится в разложенном положении, торсионная пружина может быть возвращена в сложенную ориентацию, готовую, чтобы поддерживать следующий процесс раскладывания. Например, торсионная пружина может быть выполнена таким образом, что кручение педалей шатуна 56 повторно натягивает пружину. Процесс повторного натяжения может быть выполнен любым подходящим образом. Например, электромотор может возвращать торсионную пружину. В качестве другого примера, соединительное устройство может быть соединено с шатуном 56. Соединительное устройство может быть выполнено таким образом, что, когда пользователь инициирует кручение педалей шатуна 56, торсионная пружина автоматически повторно позиционируется. Например, передача с зубчатой половиной может быть соединена с пружиной и шатуном 56, чтобы активировать полуоборот торсионной пружины в разложенном состоянии, но не зацепляется после того, как торсионная пружина вернулась в сложенное состояние. Альтернативно, соединительное устройство может включать в себя выступ, и шатун 56 может иметь соответствующий выступ, выполненный с возможностью принудительного отведения пружины обратно в сложенную ориентацию.
[0095] Узел 16 руля может быть соединен с возможностью поворота с передним сегментом 30 между вытянутым положением, как показано на фиг. 1 и 3, и убранным положением, как показано на фиг 2. Со ссылкой на фиг. 1 и 3, узел 16 руля может, например, включать в себя вынос 64 руля, соединенный с возможностью вращения с передним сегментом 30 рамы 14. Руль 66 поддерживается на выносе 64 руля для руления водителем электрического велосипеда 10. Узел 16 руля может включать в себя вилку 68, поддерживающую с возможностью поворота переднее колесо 20. Передний сегмент 30 рамы 14 может поддерживать с возможностью поворота вилку 68, и вынос 64 руля может быть соединен с вилкой 68 для поворота вилки 68 относительно переднего сегмента 30. Вилка 68 может, например, включать в себя один рычаг, который поддерживает переднее колесо 20, как показано на чертежах, или альтернативно может включать в себя два ответвления, которые поддерживают противоположные стороны переднего колеса 20.
[0096] Со ссылкой на фиг. 5A, вынос 64 руля может быть разъемным образом соединен с вилкой 68. Вилка 68 и/или вынос 64 руля могут поддерживать по меньшей мере один магнит 70 для удерживания выноса 64 руля на вилке 68. Например, вилка 68 может поддерживать магнит 70, а вынос 64 руля может представлять конец 72, сформированный из ферромагнитного материала. Чтобы собирать вынос 64 руля с вилкой 68, магнит 70 совмещается с концом, чтобы магнитным образом притягивать конец к магниту 70. Один из выноса 64 руля и вилки 68 может включать в себя механический замок 74, например, механический зажим 74 (аналогичный показанному на фиг. 32) для прижима выноса 64 руля к вилке 68 после сборки. Магнит 70 может быть постоянным магнитом. Чтобы разбирать вынос 64 руля с вилки 68, усилие, большее, чем сила магнитного притяжения между магнитом 70 и концом 72, может быть приложено, т.е. приложено вручную пользователем, чтобы отцеплять вынос 64 руля от вилки 68. Когда отцеплен от вилки 68, вынос 64 руля и руль 66 могут храниться в кожухе 36, как показано на фиг. 5A. Магнит 70 может быть электромагнитом (идентифицирован с помощью элемента с номером 70 на фиг. 5A), который может быть включен, т.е. формировать магнитное поле, чтобы удерживать вынос 64 руля на вилке 68. Электромагнит 70 может быть выключен, т.е. убирать магнитное поле, чтобы обеспечить возможность отцепления выноса 64 руля от вилки 68, как показано на фиг. 5A. Например, электромагнит 70 может снабжаться электропитанием, чтобы совмещать вынос 64 руля с вилкой 68, в это время механический зажим 74 может быть зажат, чтобы фиксировать вынос 64 руля и вилку 68. После того как вынос 64 руля прикреплен к вилке 68, электромагнит 70 может быть выключен, чтобы обеспечить возможность снятия выноса 64 руля с вилки 68, после того как механический зажим разжат.
[0097] Со ссылкой на фиг. 7, электромагнит 70 может включаться и/или выключаться вручную и/или автоматически. Например, переключатель может быть на связи с электромагнитом 70, чтобы включать и выключать электромагнит. Кроме того, или в альтернативе, вычислительное устройство 28 электрического велосипеда 10 может автоматически включать электромагнит 70. Например, вычислительное устройство 28 может снабжать питанием электромагнит 70, когда рама 14 раскладывается, что может быть сообщено вычислительному устройству 28 посредством датчиков (не показаны). В качестве другого примера, вычислительное устройство 28 может снабжать энергией электромагнит 70, когда электрический велосипед 10 авторизован для использования с помощью авторизованного паспорта безопасности, как изложено выше. Вычислительное устройство 28 может автоматически выключать электромагнит 70, когда, например, механический зажим 74 зажимается, что может быть сообщено вычислительному устройству 28 посредством датчиков (не показаны). Велосипед 10 может включать в себя датчик 49 в одном из первого сегмента 30 и второго сегмента 32 и выполнен с возможностью обнаружения, когда рама 14 находится по меньшей мере в одном из сложенного положения и разложенного положения. Датчик 49 может сообщать указание о том, что рама 14 находится в сложенном положении и/или разложенном положении, вычислительному устройству 28.
[0098] Механический замок 74 может разъемным образом сцеплять узел 66 руля и первый сегмент 30, когда узел 66 руля находится в вытянутом положении. Механический замок 74 может быть выполнен с возможностью уведомления контроллера 73, например, вычислительного устройства 28, когда механический замок 74 сцепляет узел 66 руля и первый сегмент 30. Например, механический замок 74 может включать в себя датчик, выполненный с возможностью обнаружения, когда механический замок 74 блокирует узел 66 руля в вытянутом положении. Этот датчик может сообщать данные контроллеру 73, например, вычислительному устройству 28, чтобы идентифицировать для контроллера 73, например, вычислительного устройства 28, что узел 66 руля заблокирован в вытянутом положении. Контроллер 73, например, вычислительное устройство 28, может быть выполнен с возможностью выдачи команды на прерывание электропитания электромагнита 70, когда механический замок 74 идентифицирует для контроллера 73, что узел 66 руля заблокирован в вытянутом положении. В качестве альтернативы, контроллер 73 запрограммирован, чтобы снабжать энергией электромагнит 70 в течение заданного периода времени, после того как в электромагнит 70 первоначально была подана электроэнергия.
[0099] Как показано на фиг. 7, система 47 помощи раскладыванию может включать в себя вычислительное устройство 28. Как изложено выше, вычислительное устройство 28 может включать в себя процессор 31 и запоминающее устройство 29. Как показано в блоке 310, на фиг. 8, запоминающее устройство 29 может хранить команды, содержащие программный код для приема команды от устройства ввода, чтобы перемещать первый сегмент 30 и второй сегмент 32 рамы 14 из сложенного положения в разложенное положение. Устройство ввода может быть, например, паспортом безопасности, таким как распознанный мобильный телефон, RFID-устройство и т.д., как изложено выше. Как показано в блоке 312, команды могут содержать программный код для того, чтобы соединять источник мощности, например, аккумулятор 26, с электромагнитом 44, чтобы отталкивать магнит 42, который магнитным образом соединен с электромагнитом 44, когда рама находится в сложенном положении. Другими словами, вычислительное устройство 28 может выдавать команду электромагниту 44, чтобы открывать раму 14 из сложенного положения в разложенное положение в ответ на входной сигнал вычислительного устройства 28. Входной сигнал вычислительному устройству 28 может быть шагом, предпринятым водителем, например, введение в контакт механического или электронного ключа, нажатие кнопки и т.д., или может быть шагом, автоматически предпринимаемым вычислительным устройством 28, когда паспорт безопасности обнаружен. Как показано в блоке 314, команды могут содержать программный код для того, чтобы принимать уведомление от датчика 49 о том, что рама 14 находится в разложенном положении.
[00100] Как показано в блоке 316, команды могут включать в себя программный код для того, чтобы, в ответ на команду от устройства ввода, выдавать команду на соединение источника мощности, например, аккумулятора 26, с электромагнитом 70, чтобы отталкивать притянутый узел 16 руля в вытянутое положение. Как показано в блоке 318, команды могут включать в себя программный код для приема указания от механического замка 74 о том, что узел 16 руля заблокирован в относительно вытянутом положении, и выдавать команду на отсоединение источника мощности, например, аккумулятора 26, от электромагнита 70 в ответ на указание от механического замка 74.
[00101] Команды могут включать в себя программный код для того, чтобы сначала снабжать энергией электромагнит 44, чтобы помогать в раскладывании рамы 14 из сложенного положения в разложенное положение, и затем снабжать энергией электромагнит 70, чтобы помогать в блокировании узла 16 руля в вытянутом положении. По существу, водитель велосипеда 10 может сначала раскладывать раму 14 и затем блокировать узел 16 руля в вытянутом положении.
[00102] Со ссылкой на фиг. 1-3, узел 18 сиденья может включать в себя подседельный штырь 76, сцепленный с рамой 14, например, задним сегментом 32, и седло 78, соединенное с подседельным штырем 76. Вынос 64 руля и подседельный штырь 76 являются вытянутыми, а рама 14 включает в себя низкий профиль. Эта конструкция создает нижнюю ступень, поверх которой водителю обеспечена возможность легко перешагивать раму 14, чтобы садиться на электрический велосипед 10.
[00103] Подседельный штырь 76 включает в себя штырь 80 и подседельную трубу 82, соединенную с рамой 14 и являющуюся подвижной относительно рамы 14. В частности, рама 14 может определять прорезь 84, т.е. канал 84, телескопически принимающий подседельную трубу 82, так что подседельная труба 82 может выборочно скользить относительно рамы 14 через прорезь 84. Штырь 80 может быть телескопически соединен с подседельной трубой 82, так что штырь 80 может выборочно убираться в подседельную 82 трубу. Седло 78 может быть прикреплено к подседельной трубе 82.
[00104] Прорезь 84 может протягиваться сквозь раму 14 от верха рамы 14 к низу рамы 14. Подседельная труба 82 может быть закреплена относительно рамы 14 в прорези 84 любым подходящим способом. Например, запорный механизм (не показан) может разъемным образом зацеплять подседельную трубу 82 в прорези 84 для крепления подседельной трубы 82 относительно рамы 14. Запорный механизм может быть заблокирован и разблокирован с помощью механической или электрической кнопки, переключателя и т.д.
[00105] Подседельная труба 82 может определять прорезь 86, которая телескопически принимает штырь 80. Прорезь 86 подседельной трубы 82 может протягиваться вдоль общей оси, что и прорезь 84 рамы 14. Штырь 80 может быть прикреплен к подседельной трубе 82 в прорези 86 любым подходящим способом. Например, запорный механизм (не показан), который может быть таким же или отличным от запорного механизма, который блокирует штырь 80 на подседельной трубе 82, может разъемным образом взаимно блокировать штырь 80 и подседельную трубу 82 для крепления штыря 80 и подседельной трубы 82 друг с другом. Запорный механизм может быть заблокирован и разблокирован с помощью механической или электрической кнопки, переключателя и т.д.
[00106] Со ссылкой на фиг. 1-4, подседельный штырь 76 может перемещаться между вытянутым положением, как показано на фиг. 1 и 3, и убранным положением, как показано на фиг. 2 и 4. Подседельный штырь 76 может протягиваться относительно рамы 14 с подседельной трубой 82, вытянутой вверх из рамы 14, и штырем 80, протягивающимся вверх от подседельной трубы 82 в вытянутом положении. Подседельный штырь 76 может быть втянут относительно рамы 14 с подседельной трубой 82, протягивающейся вниз относительно рамы 14, и штырем 80, протягивающимся вниз в подседельную трубу 82 в убранном положении. Перемещение штыря 80 и подседельной трубы 82 между вытянутым положением и убранным положением может быть ручным, т.е. руками пассажира, и/или может быть автоматизировано, т.е. моторизировано.
[00107] Как показано на фиг. 4, штырь 80 может оставаться вытянутым, чтобы функционировать в качестве рукоятки для перемещения электрического велосипеда 10. Другими словами, подседельная труба 82 может быть перемещена в убранное положение так, что рама 14 может быть сложена, и кожух 36 может покрывать раму 14. Подседельная труба 82 может оставаться в вытянутом положении, так что пользователь, например, пассажир, может держать сложенный электрический велосипед 10 посредством вытянутой подседельной трубы 82 и катить сложенный электрический велосипед 10. Когда пользователь пытается убрать подседельную трубу 82 в убранное положение, пользователь может делать это, чтобы, например, уменьшать занимаемое пространство для электрического велосипеда 10, например, для хранения.
[00108] Как показано на фиг. 2, в убранном положении штырь 80 подседельного штыря 76 может протягиваться практически вниз от рамы 14, чтобы поддерживать раму 14 на земле. Со ссылкой на фиг. 2 и 4, ролик 88 может быть установлен на подседельную трубу 82 подседельного штыря 76 для помощи в перемещении электрического велосипеда 10, когда подседельный штырь 76 находится в убранном положении. В частности, когда рама 14 перемещается между убранным положением, и подседельный штырь 76 находится в убранном положении, электрический велосипед 10 может катиться на колесах и ролике 88.
[00109] Ролик 88 может выборочно убираться в подседельную трубу 82. Например, зубчатая передача (не показана) может быть соединена между роликом 88 и петлей 34. Зубчатая передача может быть выполнена с возможностью вытягивания ролика 88 из подседельной трубы 82, когда рама 14 сложена, и уборки ролика 88 в подседельную трубу 82, когда рама 14 разложена. По существу, вытягивание/уборка ролика 88 не зависит от перемещения подседельного штыря 76 между вытянутым положением и убранным положением.
[00110] Аккумулятор 26 может быть расположен в и поддерживаться посредством подседельного штыря 76. Аккумулятор 26 может быть, например, многоэлементным литиево-ионным аккумулятором 26. Аккумулятор 26 может иметь любой подходящий номинал емкости, такой как 5-10 Ампер-часов.
[00111] Фрагмент подседельного штыря 76, поддерживающий аккумулятор 26, может быть съемным с остальной части узла 18 сиденья. Например, штырь 80 подседельного штыря 76 может поддерживать аккумулятор 26, и он может быть съемным со штыря 80. Подседельная труба 82 и штырь 80 могут иметь соответствующие электрические контакты для присоединения аккумулятора 26 к остальной части электрического велосипеда 10, например, к вычислительному устройству 28.
[00112] Будучи съемным с остальной части узла 18 сиденья, аккумулятор 26 может быть спарен с вычислительным устройством 28, чтобы работать как средство, препятствующее краже. Когда аккумулятор 26 снят с остальной части электрического велосипеда 10, электрический велосипед 10 непригоден для верховой езды, и, по существу, аккумулятор 26 может быть снят, чтобы действовать как средство, препятствующее краже.
[00113] Как изложено дополнительно ниже, подседельная труба 82, когда снята со штыря 80, может быть состыкована с зарядной консолью, чтобы перезаряжать аккумулятор 26 дистанционно от остальной части электрического велосипеда 10. Зарядная консоль может включать в себя электрический контакт на связи с источником мощности и выполнена с возможностью связи с электрическим контактом подседельной трубы 82 для электрического заряда аккумулятора 26. В качестве одного примера, зарядная консоль может быть зарядной консолью 90 транспортного средства, интегрированной в консоль транспортного средства 12, как показано на фиг. 26. В качестве другого примера, зарядная консоль может быть внешней зарядной консолью 91, как показано на фиг. 27, например, подключенной к настенной розетке, например, настольным зарядным устройством.
[00114] Электрический велосипед 10 может включать в себя систему наблюдения за сборкой. Например, система наблюдения за сборкой включает в себя датчики, например датчик 49, для наблюдения за сложенным/разложенным положением рамы 14, сборкой выноса 64 руля на вилку 68 узла 16 руля, положением узла 18 сиденья и/или положением кожуха 36. Датчики могут быть датчиками приближения, чтобы измерять положение, и/или датчиками давления, чтобы измерять зажатие. Например, как показано в блоке 320 на фиг. 8, в системе 47 помощи раскладыванию запоминающее устройство 29 может хранить команды, содержащие программный код для обеспечения визуального и/или звукового подтверждения того, что рама 14 разложена, и/или что механический замок 74 заблокировал узел 16 руля в вытянутом положении.
[00115] Со ссылкой на фиг. 13, система наблюдения за сборкой может включать в себя визуальную и/или звуковую обратную связь, когда рама 14, узел 16 руля, узел 18 сиденья и/или кожух 36 правильно собраны или не собраны. Например, система наблюдения за сборкой может включать в себя одну или более зеленых ламп 96 для указания правильной сборки и/или одну или более красных ламп для указания неправильной сборки. В дополнение или в качестве альтернативы, система наблюдения за сборкой может создавать акустическим шум, такой как шум щелчка, когда один или более компонентов правильно собираются. Система наблюдения за сборкой может включать в себя кнопку тестирования, чтобы повторно проверять правильность сборки перед или во время эксплуатации электрического велосипеда 10.
[00116] Со ссылкой на фиг. 9, передний сегмент 30 и задний сегмент 32 рамы 14 представляют противоположные поверхности 98, которые находятся напротив друг друга, когда рама 14 находится в разложенном положении. В сложенном положении, как показано на фиг. 9, поверхности 98 могут быть параллельны друг другу. Петля 34 может быть между поверхностями 98.
[00117] Система 100 блокировки может поддерживаться посредством поверхностей и может быть объединена с поверхностями 98. Со ссылкой на фиг. 14A и 14B, система 100 блокировки может включать в себя блокирующее устройство, протягивающееся по меньшей мере через одну из поверхностей 98. Блокирующее устройство может быть, например, запирающим элементом 102, разъемным образом сцепляющимся с поверхностями 98. Например, как показано на фиг. 9, запирающий элемент 102 может быть U-образным, т.е., имеющим два параллельных конца и изогнутый фрагмент, протягивающийся между параллельными фрагментами. Поверхности 98 могут определять гнезда 106, которые принимают параллельные концы. Запирающий элемент 102 и по меньшей мере одно из гнезд 106 могут быть выполнены таким образом, что запирающий элемент 102 фиксируется по меньшей мере с одним из гнезд 106. Когда параллельные концы принимаются гнездами 106 на одной и той же поверхности 98, как показано на фиг. 9, рама 14 может быть перемещена в разложенное положение с запирающим элементом 102, сохраненным в гнездах 106.
[00118] Запирающий элемент 102 может быть расположен между поверхностями 98, когда первый сегмент 30 и второй сегмент 32 рамы 14 находятся в разложенном положении. Запирающий элемент 102 может быть сохранен между поверхностями 98 и может путешествовать с велосипедом 10, когда велосипед 10 эксплуатируется. Например, как показано на фиг. 3, первый сегмент 30 и второй сегмент 32 могут определять полость 101 между поверхностями 98. Запирающий элемент 102 размещается в полости 101, когда рама 14 находится в разложенном положении.
[00119] Как показано на фиг. 14A, когда рама 14 находится в сложенном положении, запирающий элемент 102 может быть удален из двух гнезд 106 на одной и той же поверхности 98 и, как показано на фиг. 14B, вставлен в одно из двух гнезд 106 и в гнездо 106, чтобы фиксировать раму 14 в сложенном положении на неподвижном элементе 108, таком как автомобильный багажник для велосипеда, фонарный столб и т.д. Другими словами, запирающий элемент 102 захватывает неподвижный элемент 108 между запирающим элементом 102 и рамой 14.
[00120] Замок 109 (схематично показанный на фиг. 14A) может разъемным образом запирать запирающий элемент 102 в гнездах 106. Замок 109 может быть любого подходящего типа и может быть расположен в одном или обоих гнездах 106. Запирающий элемент 102 может, например, включать в себя вырез (не показан), который зацепляет замок 109 в гнезде 106. Замок 109 может, например, включать в себя систему храпового механизма, так что запирающий элемент 102 может быть заперт в гнездах 106 на изменяющихся глубинах, чтобы размещать различные неподвижные элементы. Разъединяющее устройство 110, как показано на фиг. 14A и 14B, может разъединять замок 109 и запирающий элемент 102. Разъединяющее устройство 110 может, частично, приводиться в действие электронным образом. Система наблюдения за сборкой, как изложено выше, может визуально и/или звуковым образом идентифицировать, когда замок активирован, например, когда запирающий элемент 102 правильно располагается в гнездах 106.
[00121] Другой вариант осуществления запирающей системы 100, как показано на фиг. 15, запорное устройство является гибким кабелем 112, вытягиваемым из и убираемым в раму 14 через одну из поверхностей 98. Запирающий элемент 102 прикреплен к кабелю 112 и является разъемным образом запираемым на замок.
[00122] Замок 109 может управляться любым подходящим образом. Например, замок 109 может приводиться в действие механическим образом, например, с помощью ключа, кодового замка и т.д. В альтернативе или в дополнение, как показано на фиг. 16, система 107 бесключевого замка может приводить в действие замок 109. Система 107 бесключевого замка может включать в себя датчик 111, например, датчик близости, который обнаруживает идентификатор, например, брелок ключа, мобильный телефон 48, такой как интеллектуальный сотовый телефон, и т.д., чтобы автоматически отпирать замок 109, когда идентификатор находится в пределах заданного радиуса действия. Аналогично, система 107 бесключевого замка может автоматически запирать замок 109, когда идентификатор перемещается за пределы заданного расстояния. С системой 107 бесключевого замка замок 109 может все еще быть задействован с помощью ключа в случае разряда аккумулятора 26.
[00123] Как показано на фиг. 16, система 107 бесключевого замка может включать в себя контроллер, например, вычислительное устройство 28, на связи с датчиком 111 и замком 109. Идентификатор, например, мобильное устройство 48, может быть на связи с датчиком 111 и/или вычислительным устройством 28. Например, как изложено выше, датчик 111 может быть выполнен с возможностью обнаружения присутствия идентификатора, например, мобильного устройства 48, в пределах заданного расстояния от датчика 111. Датчик 111 выполнен с возможностью сообщения об обнаружении идентификатора, например, мобильного устройства 48, вычислительному устройству 28. Вычислительное устройство 28 запрограммировано, чтобы отпирать замок 109, когда датчик сообщает обнаружение идентификатора, например, мобильного устройства 48. Альтернативно, например, вычислительное устройство 28 может быть запрограммировано, чтобы принимать команды непосредственно от идентификатора, например, мобильного устройства 48, чтобы отпирать замок 109.
[00124] Система 107 бесключевого замка может включать в себя функции для совместного использования электрического велосипеда 10. Например, пользователь может выдавать получателю код, например, передаваемый в кодированном сообщении мобильного устройства, и карту местоположения электрического велосипеда 10. Получатель может, например, вводить код получателя в мобильное устройство 48, а карта может быть отображена на мобильном устройстве 48. Получатель может затем определять местоположение велосипеда 10 с помощью карты и отпирать замок с помощью кода. Приложение, загруженное в мобильное устройство 48, может, например, сообщать код системе 107 бесключевого замка, чтобы автоматически отпирать замок 109.
[00125] Электрический велосипед 10 может также включать в себя систему обнаружения фальсификации в связи с замком 109. Система обнаружения фальсификации может обнаруживать фальсификацию с замком 109 и отправлять уведомление мобильному устройству пассажира, когда фальсификация происходит. Система обнаружения фальсификации может включать в себя, например, электрический кабель сквозь замок 109, датчики вибраций и т.д. Например, неожиданное прерывание в зарядке до полного заряда может указывать, что электрический кабель был разъединен.
[00126] Со ссылкой на фиг. 17A-18B, электрический велосипед 10 может включать в себя зарядную систему 116 для заряда аккумулятора 26 с помощью источника мощности, такого как публично доступная точка 118 зарядки. Первый вариант осуществления зарядной системы показан на фиг. 17A-17C, а второй вариант осуществления зарядной системы показан на фиг. 18A-18B.
[00127] Со ссылкой на фиг. 17B и 17C, одна из поверхностей 98, например, поверхность 98 на заднем сегменте 32, может включать в себя зарядный блок 117, поддерживаемый по меньшей мере одной из поверхностей 98. Зарядный блок 117 может, например, включать в себя штепсельную розетку 120, выполненную с возможностью приема штепселя 122 от точки 118 зарядки. Штепсельная розетка 120 и штепсель 122 могут быть любой подходящей конфигурации. Зарядный блок 117 находится на связи с аккумулятором 26 для заряда аккумулятора 26.
[00128] Электрический велосипед 10 может включать в себя систему 124 фиксации штепселя для фиксации штепселя 122 в штепсельной розетке 124. Система 124 фиксации штепселя может функционировать в качестве средства препятствования краже. Например, штепсель 122 может быть соединен с точкой 118 зарядки с помощью кабеля 126, который является антивандальным, например, включает в себя гибкую плетеную оболочку. В такой конфигурации имеющий защиту от несанкционированного вмешательства кабель126 не только подает энергию к штепсельной розетке 120, но также действует в качестве средства препятствования краже, когда система 124 фиксации штепселя фиксирует штепсель 122 на раме 14. Штепсель 122 может быть универсальным штепселем, который стандартизирован так, что штепсель 122 может быть доступен для публичного использования и может быть использован любым стандартизированным электрическим велосипедом 10. Кабель 126 может быть убираемым в точку 118 зарядки, чтобы уменьшать провисание в кабеле 126, когда штепсель 122 соединен с штепсельной розеткой 120.
[00129] Система 124 фиксации штепселя может включать в себя запирающий элемент 102 и запорные гнезда 106. Запорные гнезда 106 располагаются на противоположных сторонах штепсельной розетки 120 для приема запирающего элемента 102. Другими словами, штепсельная розетка 120 располагается между запорными гнездами 106.
[00130] Запирающий элемент 102 может, например, быть выполнен с возможностью зацепления зарядного штепселя 122. Штепсель 122 может определять канавку 128, соответствующую форме и размеру запирающего элемента 102, так что запирающий элемент 102 помещается внутрь и упирается в канавку 128, чтобы фиксировать штепсель 122 на раме 14. Запирающий элемент 102 может иметь круглое поперечное сечение, а канавка 128 может иметь полукруглое поперечное сечение.
[00131] Система 124 фиксации штепселя может включать в себя замок (типа замка 109 на фиг. 14A), который разъемным образом запирает запирающий элемент 102 в гнездах 106. Замок может быть любого подходящего типа и может быть расположен в одном или обоих гнездах 106. Запирающий элемент 102 может, например, включать в себя вырез (не показан), который зацепляет замок в гнезде 106. Замок 109 может, например, включать в себя систему храпового механизма, так что запирающий элемент 102 может быть заперт в гнездах 106 на изменяющихся глубинах, чтобы размещать различные по размеру и форме штепсели. Система наблюдения за сборкой, как изложено выше, может визуально и/или звуковым образом идентифицировать, когда замок активирован, например, когда запирающий элемент 102 правильно располагается в гнездах 106.
[00132] Запирающий элемент 102 может быть сохранен в запирающих гнездах 106, когда штепсельная розетка 120 не используется. В этой конфигурации рама 14 может быть перемещена в разложенное положение с запирающим элементом 102 в запирающих гнездах 106. Со ссылкой на фиг. 14B, когда рама 14 находится в сложенном положении, запирающий элемент 102 может быть убран из запирающих гнезд 106, так что штепсель 122 может быть сцеплен с штепсельной розеткой 120. После того как штепсель 122 введен в контакт с штепсельной розеткой 120, запирающий элемент 102 может быть вставлен в запирающие гнезда 106 и в канавку 128, чтобы фиксировать штепсель 122 на раме 14.
[00133] Со ссылкой на фиг. 18A, электрический велосипед 10 может включать в себя штепсель 130, который входит в контакт с розеткой 134 на точке 118 зарядки, и шнур 132, соединяющий штепсель 130 с рамой 14. Шнур 132 может протягиваться от одной из поверхностей 98 рамы 14. Шнур 132 может быть убираемым в раму 14 через поверхность 98. Шнур 132 может быть антивандальным, например, может включать в себя гибкую плетеную оболочку.
[00134] Запирающий элемент 102 может быть соединен со штепселем 130 для фиксации на поверхности 98 и для фиксации на точке 118 зарядки. Запирающий элемент 102 может фиксировать в запирающих гнездах 106 в поверхности 98 аналогично фиксации на фиг. 17A-C. В такой конфигурации запирающий элемент 102 удерживает штепсель 130 на поверхности 98, и рама 14 может быть перемещена в сложенное положение с запирающим элементом 102, сцепленным с поверхностью 98.
[00135] Штепсель 130 может включать в себя кольца 136, которые принимают запирающий элемент 102, так что штепсель 130 и запирающий элемент 102 могут перемещаться как блок между рамой 14 и точкой 118 зарядки. Запирающий элемент 102 может скользить относительно штепселя 130 сквозь кольца 136, чтобы регулировать запирающий элемент 102 относительно штепселя 130 для правильного сцепления с рамой 14 и/или точкой 118 зарядки.
[00136] Точка 118 зарядки может быть выполнена с возможностью приема и фиксации запирающего элемента 102. Например, запирающий элемент 102 может иметь круглое поперечное сечение, а точка 118 зарядки может определять канавки 138, имеющие полукруглое поперечное сечение для приема запирающего элемента 102. Запирающий элемент 102 может примыкать к точке 118 зарядки в канавках 138. Как показано на фиг. 18A, запорный цилиндр 140 может запирать запирающий элемент 102, чтобы запирать точку 118 зарядки между запорным цилиндром 140 и запирающим элементом 102. Запорный цилиндр 140 может храниться в любом подходящем месте в электрическом велосипеде 10, когда не используется, например, между поверхностями 98.
[00137] Приводной механизм 24 включает в себя шатун 56 и электромотор 142, оба соединенные с задним колесом 22 для привода заднего колеса 22. Шатун 56 и электромотор 142 могут быть соединены с задним колесом 22 любым подходящим образом. Например, как показано на фиг. 19-21, ременной привод 144 соединяет шатун 56 и электромотор 142 с задним колесом 22. Шатун 56 может механически вращаться водителем, например, с помощью ступней водителя. Электромотор 142 может поддерживаться около шатуна 56 рядом со средней частью рамы 14. Эта конфигурация балансирует вес электрического велосипеда 10. Ременной привод 144 и электромотор 142 могут быть заключены под крышку.
[00138] Ременной привод 144 может иметь тип, называемый в промышленности "ременным приводом Gates". Ременной привод 144 включает в себя зубчатое колесо 148, т.е., переднюю звездочку, соединенную с шатуном 56 и с электромотором 142, и включает в себя зубчатое колесо 150, соединенное с задним колесом 22. Зубчатое колесо 148 является ведущим зубчатым колесом, а зубчатое колесо 150 является ведомым зубчатым колесом. Шатун 56 соединяется с возможностью поворота с рамой 14 с использованием подшипников 152. Зубчатое колесо 148 соединяется с возможностью поворота с рамой 14 с использованием подшипников 152.
[00139] Ремень 154 сцепляется с и находится поверх зубчатых колес 148, 150 и передает вращение от зубчатого колеса 148 к зубчатому колесу 150. Ременной привод 144 может быть односкоростным, т.е., фиксированным зубчатым приводом. Альтернативно, зубчатое колесо, соединенное с задним колесом 22, может быть узлом фиксированной эпициклической передачи. Узел фиксированной эпициклической передачи может включать в себя шестерню, втулку и кассету между шестерней и втулкой. Такая конфигурация может быть 3-5 скоростным узлом зубчатой передачи.
[00140] Шатун 56 соединяется с зубчатым колесом с помощью кассетного соединения 156, т.е., кассеты 156. Кассетное соединение 156 выполнено с возможностью передачи движения от шатуна 56 к зубчатому колесу 148, когда шатун 56 поворачивается вперед быстрее переднего вращения зубчатого колеса 148, и выполнено с возможностью свободного вращения относительно шатуна 56, когда зубчатое колесо 148 вращается вперед быстрее шатуна 56. Это обеспечивает возможность независимого движения вперед шатуна 56 и зубчатого колеса 48, например, для выборочного входного воздействия от шатуна 56 и/или электромотора 142. Кассетное соединение 156 может называться обгонной муфтой. Как известно специалисту в данной области техники, кассетное соединение 156 может, например, включать в себя внешнюю втулку и шпиндель. Внешняя втулка может иметь внутреннюю зубчатую форму, и шпиндель может включать в себя храповый механизм или подпружиненный элемент, который позволяет внешней втулке вращаться в одном направлении относительно шпинделя и фиксироваться относительно шпинделя, когда вращается в противоположном направлении.
[00141] Кассетное соединение 156 поддерживается шатуном 56 и/или зубчатым колесом 148 между шатуном 56 и зубчатым колесом. Подшипник 153 располагается между зубчатым колесом 148 и корпусом 155, который поддерживает шатун 56. Корпус 155 может быть зафиксирован относительно рамы 14.
[00142] Со ссылкой на фиг. 19 и 21, мотор 142 может быть электрическим мотором. Например, электромотор 142 может быть электромотором с аксиальным магнитным потоком. Электромотор 142 может включать в себя магниты 158, поддерживаемые по окружности вокруг зубчатого колеса 148, и фазированные катушки 160, поддерживаемые в круговой структуре на раме 14. В частности, магниты 158 могут быть прикреплены к зубчатому колесу 148, а фазированные катушки 160 могут быть прикреплены к раме 14. Катушки 160 генерируют магнитные поля, чтобы вынуждать магниты 158 вращать зубчатое колесо 148. Скорость вращения зубчатого колеса 148 может управляться посредством устройства ввода, например, механического устройства ввода, поддерживаемого на руле 66, такого как рычаг, кнопка, вращаемая кнопка и т.д. Устройство ввода может, альтернативно, быть мобильным устройством 48, например, через программу или приложение на мобильном устройстве 48, доступном с помощью пользовательского интерфейса мобильного устройства 48, например, сенсорного экрана. Устройство ввода может быть соединено с вычислительным устройством 28, которое может быть соединено с электромотором 142, чтобы управлять электромотором 142.
[00143] Кассетное соединение 156 располагается между шатуном 56 и зубчатым колесом 148. Как показано на фиг. 19 и 21 по меньшей мере фрагмент электромотора является концентрическим относительно кассетного соединения 156. Например, магниты 158 могут быть расположены с интервалом друг от друга концентрически относительно кассетного соединения 156.
[00144] Как показано на фиг. 19, зубчатое колесо 148 может быть концентрическим относительно по меньшей мере фрагмента корпуса 155. Подшипник 153 может быть расположен между зубчатым колесом 148 и корпусом 155.
[00145] Шатун 56 и электромотор 142 могут быть использованы независимо или одновременно. Например, шатун 56 может быть использован независимо для приведения в движение электрического велосипеда 10, посредством кручения педалей шатуна 56 в прямом направлении вращения без входного воздействия от электромотора 142. При таком использовании шатун 56 зацепляет кассетное соединение 156, чтобы приводить в движение зубчатое колесо 148. Электромотор 142 может быть использован независимо для приведения в движение электрического велосипеда 10 посредством вращения зубчатого колеса 148 в прямом направлении вращения с помощью магнитов 158 и катушек 160 без входного воздействия от шатуна 56.
[00146] Шатун 56 и электромотор 142 могут быть использованы одновременно с использованием кассетного соединения 156 между шатуном 56 и зубчатым колесом 148. Например, электромотор 142 может вращать зубчатое колесо 148 с выбранной скоростью. Во время этого вращения посредством электромотора 142, если шатун 56 вращает вперед кассетное соединение 156 медленнее, чем электромотор 142 вращает вперед зубчатое колесо 148, тогда электромотор 142 приводит в движение зубчатое колесо 148, а кассетное соединение 156 позволяет зубчатому колесу 148 вращаться вперед относительно шатуна 56. Альтернативно, если шатун 56 вращает вперед кассетное соединение 156 быстрее, чем электромотор 142 вращает вперед зубчатое колесо 148, тогда кассетное соединение 156 зацепляет зубчатое колесо 148 и переднее вращение от шатуна 56 передается зубчатому колесу 148. По существу, электромотор 142 может поддерживать вращение зубчатого колеса 148 с минимальной скоростью, т.е. не позволяет зубчатому колесу 148 вращаться ниже минимальной скорости, а шатун 56 может выборочно вращаться вперед быстрее, чем электромотор 142, чтобы вращать зубчатое колесо 148 свыше минимальной скорости.
[00147] Электромотор 142 может быть использован, чтобы генерировать электричество, когда зубчатое колесо 148 вращается посредством шатуна 56, и/или во время торможения электрического велосипеда 10. Другими словами, когда шатун 56 вращает зубчатое колесо 148 вперед, магниты 158 перемещаются относительно фазированных катушек 160, и электромотор 142 действует в качестве генератора переменного тока. Электромотор 142 может выдавать электричество аккумулятору 28, чтобы заряжать аккумулятор 26, и/или может быть соединен с другими устройствами накопления мощности.
[00148] Поскольку зубчатое колесо 150 прикреплено к заднему колесу 22, ремень 154 соединяется с зубчатым колесом 148, и зубчатое колесо 148 находится поверх кассетного соединения 156, зубчатое колесо 148 вращается с задним колесом 22 посредством ремня 154. Другими словами, зубчатое колесо 148 вращается все время, когда заднее колесо 22 вращается. Соответственно, электромотор 142 может функционировать как генератор переменного тока, как изложено выше, в любое время, когда заднее колесо 22 вращается. Ремень 154 и электромотор 142 могут быть разработаны, чтобы обеспечивать рекуперативное торможение для заднего колеса 22.
[00149] Работа электромотора 142 в качестве генератора переменного тока уменьшает скорость вращения зубчатого колеса 148. По существу, электромотор 142 может работать как генератор переменного тока, чтобы по меньшей мере частично, тормозить электрический велосипед 10. Электромотор 142 может работать как генератор переменного тока, например, в режиме тренировки, в котором электромотор 142 может обеспечивать сопротивление шатуну 56 посредством работы магнитов/катушек 160. Когда водитель крутит педали шатуна 56, чтобы преодолевать сопротивление, водитель вращает магниты 156 относительно катушек 160, чтобы задействовать электромотор 142 в качестве генератора переменного тока.
[00150] Для восстановления кинетической энергии прямое соединение между электромотором 142 и задним колесом 22 гарантирует, что поток энергии может быть полностью реверсирован. Кассетное соединение 156 на шатуне 56 гарантирует, что велосипедист может двигаться накатом, пока электромотор 142 вращается посредством кинетической энергии велосипедиста и электрического велосипеда 10.
[00151] Как только энергия для электромотора 142 прерывается, и/или пассажир прекращает крутить педали, электромотор 142 может переключаться в режим рекуперации. Это означает, что электрический велосипед 10 замедляется гораздо быстрее, чем если движется по инерции. Это является эффективным электронным торможением, и задний стоп-сигнал 143 (показан на фиг. 3) автоматически включается. Поскольку такой же эффект рекуперации случается, когда пассажир применяет тормоза (прекращает крутить педали, энергия электромотора 142 прерывается, режим рекуперации активируется), нет необходимости для отдельного контактного переключателя тормоза.
[00152] Велосипед 10 может включать в себя контроллер на связи с электромотором 142 и стоп-сигналом 143. Контроллер может быть выполнен с возможностью подсветки стоп-сигнала 143, когда зубчатое колесо 150 приводит в движение ремень 154, т.е., когда велосипед 10 движется накатом. Например, со ссылкой на фиг. 28, задний стоп-сигнал 143 может быть на связи с вычислительным устройством 28 велосипеда 10. Вычислительное устройство 28 может быть запрограммировано, чтобы подсвечивать стоп-сигнал 143, когда зубчатое колесо 150 приводит в движение ремень 154. Другими словами, например, в случае, когда водитель прекращает крутить педали, и велосипед 10 движется накатом, зубчатое колесо 150 приводит в движение ремень 154, и электромотор 142 генерирует энергию для заряда аккумулятора 26, в таких случаях вычислительное устройство 28 может обнаруживать, что зубчатое колесо 150 приводит в движение ремень 154 и, в ответ выдает команду на подсветку стоп-сигнала 143.
[00153] Со ссылкой на фиг. 23, вычислительное устройство 28 может быть запрограммировано с помощью логики управления рекуперацией энергии. Как показано в блоке 164, логика управления рекуперацией энергии может иметь три режима. В частности, логика управления рекуперацией энергии может быть выключена, может работать в режиме дросселя или может работать в режиме помощи кручению педалей. Режим помощи кручению педалей может называться педально-электрическим или режимом вспомогательной мощности. Цели режима помощи кручению педалей, например, могут полностью согласовываться с правилами, такими как директива Европейского Союза 2002/24/EC и/или EN15194 для законного использования на дороге электрических велосипедов.
[00154] Когда логика управления рекуперации энергии выключена, электрический велосипед 10 может приводиться в движение посредством механического входного воздействия от шатуна 56 и не снабжается энергией с помощью электромотора 142, как показано в блоке 166. В режиме дросселя электрический велосипед 10 может приводиться в движение посредством электромотора 142 и управляется независимо от механического входного воздействия от шатуна 56. Как показано в блоке 168, когда энергия требуется, т.е., с помощью устройства ввода, задействуемого водителем, логика управления рекуперацией энергии выдает энергию электромотору 142. Например, устройство ввода может по-разному быть задействовано, чтобы изменять мощность для электромотора 142. Как показано в блоке 168, если энергия не требуется, логика управления рекуперацией энергии работает в режиме рекуперации. В режиме рекуперации заднее колесо 22 электрического велосипеда 10 замедляется, и фонарь тормоза активируется.
[00155] Когда логика управления рекуперацией энергии переключается в режим помощи кручению педалей, электрический велосипед 10 может приводиться в движение как посредством электромотора 142, так и механического воздействия от шатуна 56. Как показано в блоке 170, только если водитель крутит педали шатуна 56, можно приводить в движение электрический велосипед 10 с помощью электромотора 142, чтобы дополнять энергию, механически обеспечиваемую водителем. Точная величина вспомогательной мощности вычисляется посредством вычислительного устройства 28. Когда находится в режиме помощи кручению педалей, когда педали шатуна 56 не крутятся, логика управления рекуперацией энергии работает в режиме рекуперации. В режиме рекуперации заднее колесо 22 электрического велосипеда 10 замедляется, и стоп-сигнал активируется.
[00156] Электромотор 142 может работать, чтобы сглаживать передачу мощности заднему колесу 22. Другими словами, некоторые водители электрического велосипеда 10 могут крутить педали шатуна 56 труднее/легче при определенных углах вращения на основании, например, физических динамических характеристик водителя. Например, некоторые водители могут обеспечивать «мертвую зону» в энергии для шатуна 56, когда ноги велосипедиста проходят над верхней мертвой точкой шатуна 56, и выдавать больше энергии при опускании.
[00157] Как показано на фиг. 19, 21 и 22, датчик 172 положения может быть прикреплен к шатуну 56, чтобы идентифицировать «мертвые зоны» во вращении шатуна 56. Эта идентификация «мертвых зон» может быть использована, чтобы задействовать электромотор 142 в «мертвых зонах», чтобы сглаживать движение электрического велосипеда 10.
[00158] Со ссылкой на фиг. 24 и 25, контроллер, например, вычислительное устройство 28 может быть запрограммировано с помощью логики управления мощностью. Запоминающее устройство 29 вычислительного устройства 28 может хранить команды, содержащие программный код для реализации логики управления мощностью, как дополнительно указано ниже. Логика управления мощностью показана отдельно на фиг. 24 и логика управления мощностью показана как включенная в логику управления мощностью и рекуперацией на фиг. 25. Другими словами, как показано на фиг. 25, если логика управления мощностью и рекуперацией находится в режиме помощи за счет педалей, как показано на этапе 164, и шатун 56 приводится в действие педалями, то логика управления мощностью функционирует.
[00159] Логика управления мощностью может управлять ресурсом аккумулятора 26 и может передавать состояние заряда аккумулятора 26 в пользовательский интерфейс 218 транспортного средства и/или мобильного устройства 48, к примеру, в сотовый телефон, навигационный модуль и т.д. Поскольку напряжение гальванического элемента может падать под нагрузкой (при ускорении) и может восстанавливаться, когда нагрузка снимается, фактическое состояние заряда может быть аппроксимировано с использованием алгоритма.
[00160] Логика управления мощностью может быть основана на мгновенных и/или непрерывных данных о сердечном ритме водителя. Вычислительное устройство 28 велосипеда 10 может быть выполнено с возможностью принимать данные о сердечном ритме. Запоминающее устройство 29 вычислительного устройства 28, например, может хранить команды, включающие в себя в себя программный код для того, чтобы принимать сердечный ритм водителя. Со ссылкой на фиг. 28, монитор 145 частоты сердечного ритма, например, может поддерживать связь с вычислительным устройством 28 и может быть выполнен с возможностью передавать в вычислительное устройство 28 сигнал сердечного ритма, представляющий сердечный ритм водителя, в контроллер, например, в вычислительное устройство 28. Монитор 145 частоты сердечного ритма может, например, включать в себя контактные пластины, которые измеряют пульс водителя. Например, контактные пластины могут располагаться на руле 66, чтобы измерять пульс водителя, когда водитель захватывает руль 66. Альтернативно, или помимо этого, монитор частоты сердечного ритма может иметь любую подходящую форму, например, наручные часы, нагрудный ремень и т.д.
[00161] Монитор 145 частоты сердечного ритма может использоваться, чтобы обеспечить возможность «охлаждения на последней миле», когда он используется с данными местоположения, к примеру с GPS-данными. В частности, электрический велосипед 10 может быть запрограммирован, чтобы обеспечивать увеличенную помощь во время конечного отрезка поездки. Это может помогать гарантировать, что водитель не прибудет к месту назначения в субоптимальном гигиеническом состоянии, например, потный.
[00162] Логика управления мощностью может быть основана на запланированных и/или непрерывных данных о поездке. Расстояние поездки может передаваться из мобильного устройства 48, к примеру, сотового телефона, навигационного модуля и т.д., или когда электрический велосипед 10 состыкован с мобильным устройством 48 или транспортным средством 12. Логика управления мощностью может использовать данные о поездке, к примеру, высоту, топографию, состояние дороги, свет, движение и т.д., чтобы улучшить прогнозирование использования энергии. Логика управления мощностью может принимать живые обновления в ходе движения. Электрический велосипед 10 может подключаться к мобильному устройству 48 любым подходящим способом, к примеру, через USB, беспроводную связь (технологии Bluetooth, NFC и т.д.) и т.д.
[00163] Логика управления мощностью может использовать модуль глобальной системы позиционирования (GPS), чтобы обеспечивать максимальную доступную помощь во время конечного отрезка, например, финальной запланированной мили, маршрута. Запоминающее устройство 29 может хранить команды, включающие в себя программный код для того, чтобы принимать расстояние до пункта назначения велосипеда относительно заданного положения, т.е. расстояние между велосипедом 10 и заданным пунктом назначения. Контроллер, например, вычислительное устройство 28, может быть запрограммировано, чтобы принимать расстояние до пункта назначения велосипеда 10 относительно заданного пункта назначения. Например, устройство определения местоположения может быть выполнено с возможностью передавать в контроллер расстояние до пункта назначения электрического велосипеда 10 относительно заданного пункта назначения. Устройство определения местоположения может, например, быть мобильным устройством 48. Мобильное устройство 48 может, например, включать в себя приемное GPS-устройство и может передавать GPS-информацию в вычислительное устройство 28.
[00164] Вычислительное устройство 28 может модифицировать выходную мощность аккумулятора 26 на основани расстояния до пункта назначения, чтобы обеспечить достаточное состояние заряда, чтобы достигать пункта назначения. Запоминающее устройство 29 может хранить команды, включающие в себя программный код для выдачи команд на регулирование мощности в электромоторе 142 на основании по меньшей мере сигнала сердечного ритма и расстояния до пункта назначения. Вычислительное устройство 28, может быть запрограммировано для выдачи команды, например команды непосредственно в электромотор 142, чтобы регулировать мощность в электромотор 142, на основании по меньшей мере сигнала сердечного ритма и расстояния до пункта назначения. Например, вычислительное устройство 28 может быть запрограммировано для выдачи команды на увеличение мощность в электромотор 142 по мере того как велосипед 10 приближается к заданному пункту назначения, например, когда расстояние до пункта назначения находится в пределах заданного расстояния, и сигнал сердечного ритма выше заданного уровня, из вычислительного устройства 28. Значения для заданного расстояния и заданного уровня сигнала сердечного ритма могут сохраняться в запоминающем устройстве 29 вычислительного устройства 28.
[00165] Вычислительное устройство 28 может быть запрограммировано для выдачи команды на регулирование мощности в электромоторе 142 на основании уровня заряда аккумулятора 26, в дополнение к сигналу сердечного ритма и расстоянию до пункта назначения. Запоминающее устройство 29 может хранить команды, включающие в себя программный код для того, чтобы увеличивать мощность в электромотор 142, на основании по меньшей мере сигнала сердечного ритма и расстояния до пункта назначения. Другими словами, вычислительное устройство 28 может быть запрограммировано для выдачи команды на увеличение мощности в электромоторе 142, когда расстояние до пункта назначения находится в пределах заданного расстояния, сигнал сердечного ритма выше заданного уровня и уровень заряда аккумулятора 26 выше заданного уровня.
[00166] Логика управления мощностью сопоставляет вывод электромотора 142 с входными параметрами, которые могут быть режимом дросселя или режимом помощи кручению педалей. Входные параметры могут измеряться с помощью датчика крутящего момента/положения. Логика управления мощностью измеряет состояние заряда аккумулятора 26 и защищает аккумулятор 26 от избыточного заряда, избыточного разряда, чрезмерных скоростей заряда и чрезмерных скоростей разряда.
[00167] Пользовательский интерфейс 218 и/или мобильное устройство 48 может представлять водителю варианты, чтобы вводить или не вводить параметры логики автоматического регулирования мощности (этап 174 на фиг. 24). Если водитель выбирает не использовать параметры логики автоматического регулирования мощности, то логика управления мощностью удовлетворяет функции передачи мощности в электромотор 142 согласно запросу мощности и согласно доступной мощности аккумулятора 26 в предварительно запрограммированных параметрах.
[00168] Если водитель выбирает использовать параметры логики автоматического регулирования мощности, то запросы логики управления мощностью вводятся, чтобы вычислять потребность в мощности на оставшуюся поездку. Логика управления мощностью затем сравнивает эти потребности в мощности с фактической мощностью, остающейся в аккумуляторе 26. Если заряд в аккумуляторе 26 является недостаточным, чтобы достигать пункта назначения, логика управления мощностью использует программную подпроцедуру, чтобы уменьшать мощность в электромотор 142 надлежащим образом, чтобы обеспечивать распределение равной величины мощности по оставшейся поездке вместо использования всей мощности до того, как будет достигнут пункт назначения. Если топографические данные доступны, то управляющая логика может экономить энергию для преодоления возвышенностей на заключительном этапе поездки.
[00169] Если к концу поездки состояние аккумулятора 26 превышает заданный уровень, например, заряда, требуемого для обеспечения энергии для оставшейся поездки в режиме помощи с усилением, подаваемого, например, со скоростью разряда, то логика управления мощностью может использовать другую подпроцедуру, которая увеличивает помощь за счет мощности от электромотора 142 к концу поездки, чтобы позволять сердечному ритму водителя падать и позволять достигать пункта назначения с минимальной одышкой и потливостью, например, готовым к работе в офисе. Процедура контроллера может также задаваться так, чтобы принудительно сохранять энергию (уменьшать помощь), заранее в поездке при необходимости, чтобы гарантировать, что увеличение мощности могло быть доступным к концу.
[00170] Вычислительное устройство 28 может быть запрограммировано, чтобы постепенно увеличивать мощность в электромотор 142 по мере сокращения расстояния до пункта назначения. Например, запоминающее устройство 29 может хранить команды, включающие в себя программный код для того, чтобы постепенно увеличивать мощность в электромотор 142 по мере сокращения расстояния до пункта назначения. Это помогает водителю достигать пункта назначения с минимальной одышкой и потливостью. Вычислительное устройство 28 может быть запрограммировано, например, запоминающее устройство 29 может хранить команды, включающие в себя программный код для того, чтобы определять величину увеличения мощности и скорость изменения увеличения мощности на основании по меньшей мере расстояния до пункта назначения, топографии, условий движения, режимах переключения светофора и т.д., как указано дополнительно ниже.
[00171] Вычислительное устройство 28 может быть запрограммировано, например, запоминающее устройство 29 может хранить команды, включающие в себя программный код для того, чтобы определять максимальное расстояние остывания на основании по меньшей мере уровня заряда аккумулятора 26. Вычислительное устройство 28 может выдавать команду на увеличение мощности в электромоторе 142, когда расстояние до пункта назначения меньше максимального расстояния остывания, т.е. электромотор 142 обеспечивает дополнительную помощь при кручении педалей водителю, когда велосипед 10 находится в пределах выбранного пассажиром расстояния остывания. Это помогает гарантировать, что аккумулятор 26 будет иметь достаточный заряд для того, чтобы достигать заданного пункта назначения при снижении сердечного ритма водителя.
[00172] Вычислительное устройство 28 может быть запрограммировано, например, запоминающее устройство 29 может хранить команды, включающие в себя программный код для того, чтобы вычислять максимальное расстояние остывания на основании нескольких факторов, которые могут уменьшать заряд аккумулятора. Например, вычислительное устройство 28 может быть запрограммировано, чтобы определять максимальное расстояние остывания на основании по меньшей мере топографии между велосипедом 10 и заданным пунктом назначения, условиями движения между велосипедом 10 и заданным пунктом назначения, режимами переключения светофоров между велосипедом 10 и заданным пунктом назначения и т.д. Мобильное устройство 48, например, может передавать топографию, условия движения, режимы переключения светофоров и т.д., в вычислительное устройство 28. Вычислительное устройство 28 может быть запрограммировано, чтобы принимать по меньшей мере одну из топографии, условий движения и режимов переключения светофоров, переданных в вычислительное устройство 28 из мобильного устройства 48, например, мобильного телефона. Мобильное устройство 48 может иметь программу или приложение, которое осуществляет доступ к базам данных, которые включают в себя информацию, к примеру, топографию, условия движения, режимы переключения светофоров и т.д., и может передавать информацию в вычислительное устройство 28 на основании местоположения велосипеда 10 и маршрута до заданного пункта назначения.
[00173] Вычислительное устройство 28 может быть запрограммировано, например, запоминающее устройство 29 может хранить команды, включающие в себя программный код для приема выбранного пассажиром расстояния остывания и выдачи команды на увеличение мощности в электромоторе 142, когда расстояние до пункта назначения меньше выбранного пассажиром расстояния остывания, т.е. электромотор 142 обеспечивает дополнительную помощь водителю при кручении педалей, когда велосипед 10 находится в пределах выбранного пассажиром расстояния остывания. Водитель может, например, вводить выбранное пассажиром расстояние остывания в мобильное устройство 48, и мобильное устройство может передавать выбранное пассажиром расстояние остывания в вычислительное устройство 28. Вычислительное устройство 28 может быть запрограммировано, чтобы сравнивать выбранное пассажиром расстояние остывания с максимальным расстоянием остывания.
[00174] Если выбранное пассажиром расстояние остывания меньше максимального расстояния остывания, вычисленного посредством вычислительного устройства 28, вычислительное устройство 28 может работать на основании выбранного пассажиром расстояния остывания. Если выбранное пассажиром расстояние остывания превышает максимальное расстояние остывания, вычислительное устройство 28 может быть запрограммировано, чтобы переопределять выбранное пассажиром расстояние остывания. Например, при таком сценарии, вычислительное устройство 28 может выдавать команду на увеличение мощности в электромоторе 142, когда велосипед 10 находится в пределах максимального расстояния остывания, вместо выбранного пассажиром расстояния остывания. Альтернативно, когда выбранное пассажиром расстояние остывания превышает максимальное расстояние остывания, вычислительное устройство 28 может побуждать мобильное устройство 48 отклонять ввод выбранного пассажиром расстояния остывания и предлагает водителю выбрать другое выбранное пассажиром расстояние остывания. При этом сценарии вычислительное устройство 28 может побуждать мобильное устройство 48 отображать максимальное расстояние остывания, чтобы помочь водителю в выборе выбранного пассажиром расстояния остывания, чтобы оно было меньше максимального расстояния остывания.
[00175] Вычислительное устройство 28 может быть запрограммировано, например, запоминающее устройство 29 может хранить команды, включающие в себя программный код для того, чтобы идентифицировать базовый сердечный ритм водителя перед использованием велосипеда 10 водителем. Например, прежде, чем использовать велосипед 10, водитель может контактировать с монитором 145 частоты сердечного ритма заданное время, и вычислительное устройство 28 может принимать сигнал сердечного ритма и вычислять базовый сердечный ритм, например, сердечный ритм покоя водителя. Вычислительное устройство 28 может быть запрограммировано, для выдачи команд на увеличение мощности в электромоторе 142 на основании по меньшей мере сигнала сердечного ритма относительно базового сердечного ритма. Например, по мере того, как велосипед 10 достигает заданного пункта назначения, вычислительное устройство 28 может выдавать команды в электромотор 142, чтобы увеличивать помощь при кручении педалей, чтобы понижать сигнал сердечного ритма до базового сердечного ритма. Вычислительное устройство 28 может выполнять контур обратной связи, чтобы непрерывно отслеживать сигнал сердечного ритма относительно базового сердечного ритма.
[00176] Как показано на фиг. 24 и 25, автоматический режим логики управления мощностью может включаться или отключаться на этапе 174. Когда автоматический режим выключается, логика управления мощностью вычисляет выходную мощность и вращает шестерню 148, чтобы приводить в движение электрический велосипед 10. Когда автоматический режим включается, логика управления мощностью вычисляет мощность, требуемую для оставшейся поездки, как показано на этапе 176. Это вычисление может быть основано на запросе мгновенной мощности, статистическом потреблении мощности в течении поездки, оставшемся расстоянии поездки, оставшейся топографии поездки, движении и т.д. Когда мощность, требуемая для оставшейся поездки, вычислена, логика управления мощностью вычисляет, имеет ли аккумулятор 26 достаточный заряд, чтобы удовлетворять мощности для оставшейся поездки, как показано на этапе 178. Это вычисление основано на состоянии заряда аккумулятора 26.
[00177] Если заряд аккумулятора 26 является достаточным, то логика управления мощностью отслеживает, когда электрический велосипед 10 приближается к пункту назначения на заданное расстояние. Когда логика управления мощностью определяет, что электрический велосипед 10 не находится в пределах заданного расстояния до пункта назначения, логика управления мощностью вычисляет выходную мощность в электромотор 142, как показано на этапе 180 и передает мощность в электромотор 142, как показано на этапе 182. Когда логика управления мощностью определяет, что электрический велосипед 10 находится в пределах заданного расстояния от пункта назначения, логика управления мощностью вычисляет регулирование мощности для снижения потливости, как показано на этапе 184, например, для передачи дополнительной мощности в электромотор 142, чтобы позволить водителю остыть во время последнего отрезка поездки. Регулирование мощности для снижения потливости может быть основано на измерении мгновенного сердечного ритма водителя. На основании регулирования мощности для снижения потливости, логика управления мощностью вычисляет выходную мощность и выдает мощность в электромотор 142.
[00178] Как показано на этапе 186, когда логика управления мощностью вычисляет, что заряд аккумулятора 26 не является достаточным, чтобы достичь пункта назначения, логика управления мощностью вычисляет регулирование мощности для увеличения расстояния. На основании этого вычисления логика управления мощностью вычисляет выходную мощность и выдает мощность в электромотор 142.
[00179] Как показано на фиг. 28, электрический велосипед 10 может включать в себя систему 200 связи. Система 200 связи выполнена с возможностью одновременно отправлять и обрабатывать данные между вычислительным устройством 28 и мобильным устройством 48 и/или устройством 202 пользовательского ввода транспортного средства 12. В частности, вычислительное устройство 28 электрического велосипеда 10 может обычно выполнять проверки состояния одного или более компонентов/систем электрического велосипеда 10, к примеру, состояние заряда аккумулятора, запас хода, проверка разложенного состояния рамы 14, давление в шинах, активные системы безопасности и т.д. Эти состояния могут отображаться водителю, например, прежде чем начинаться поездка, на мобильном устройстве 48 или приборной панели транспортного средства 12. Устройство 202 пользовательского ввода может, например, включать в себя мультимедийную систему транспортного средства 12, включающую в себя процессор, запоминающее устройство, пользовательский интерфейс 218, к примеру, графический пользовательский интерфейс и/или кнопки ввода и т.д.
[00180] Как показано на фиг. 26, система 200 связи может включать в себя вычислительное устройство 28 велосипеда 10 и соединение 204. Процессор 31 вычислительного устройства 28 может быть запрограммирован для осуществления связи с устройством 202 пользовательского ввода транспортного средства 12, когда велосипед 10 состыкован с транспортным средством 12. Процессор 31 может быть запрограммирован также для осуществления связи с мобильным устройством 48, в дополнение к устройству 202 пользовательского ввода, когда велосипед 10 отстыкован от транспортного средства 12. В этой конфигурации, процессор 31 может быть запрограммирован для обеспечения трехсторонней связи между устройством 202 пользовательского ввода транспортного средства, вычислительным устройством 28 велосипеда 10 и мобильным устройством 48, т.е. может допускать соединение связи из любого из устройства 202 пользовательского ввода транспортного средства, вычислительное устройство 28 велосипеда 10 и мобильное устройство 48 в другие два.
[00181] Как показано на фиг. 26B, система 200 связи может работать в режиме транспортного средства, в котором устройство 202 пользовательского ввода транспортного средства 12 поддерживает связь с вычислительным устройством 28 и управляет проверками состояния, или в дистанционном режиме (также показан на фиг. 26А), в котором мобильное устройство 48 управляет проверками состояния. Система 200 связи может автоматически переключаться между режимом транспортного средства и дистанционным режимом, когда электрический велосипед 10 удаляется из или вводится в транспортное средство 12. Например, процессор 31 может быть запрограммирован для автоматического осуществления связи с устройством 202 пользовательского ввода транспортного средства 12, когда велосипед 10 состыкован с транспортным средством 12, и автоматически прекращать связь с мобильным устройством 48, когда велосипед 10 состыкован с транспортным средством 12. Альтернативно, или помимо этого, система 200 связи может вручную переключаться между режимом транспортного средства и дистанционным режимом, например, посредством ввода вручную от водителя в устройство 202 пользовательского ввода транспортного средства 12 и/или через мобильное устройство 48. Например, процессор может быть запрограммирован, чтобы принимать команду, чтобы устанавливать связь по меньшей мере с одним из устройства 202 пользовательского ввода транспортного средства и мобильного устройства 48, например, посредством ввода вручную от водителя в устройство 202 пользовательского ввода транспортного средства 12 и/или через мобильное устройство 48.
[00182] Как показано на фиг. 28, электрический велосипед 10 включает в себя соединение 204 между системой 200 связи и устройством 202 пользовательского ввода транспортного средства 12 и/или между мобильным устройством 48. Соединение 204 может быть беспроводным соединением 204, например, через беспроводной протокол, к примеру, технология Bluetooth, или может быть проводным соединением 204, например, USB-подключением 204. Соединение 204 может поддерживать связь с аккумулятором 26 для обеспечения связи между аккумулятором 26 и устройством 202 пользовательского ввода и/или между мобильным устройством 48.
[00183] В режиме транспортного средства электрический велосипед 10 может подключаться к транспортному средству 12 и к мобильному устройству 48. Другими словами, вычислительное устройство 28 может связываться непосредственно с устройством 202 пользовательского ввода и с мобильным устройством 48. Эта связь между вычислительным устройством 28 и устройством 202 пользовательского ввода и/или мобильным устройством 48 может быть проводной и/или беспроводной связью. Транспортное средство 12 может отправлять, принимать и/или сцеплять данные электрического велосипеда 10 в мобильное устройство 48, как указано ниже.
[00184] В режиме транспортного средства вычислительное устройство 28 электрического велосипеда 10 может поддерживать связь с транспортным средством 12 через соединение 204, когда электрический велосипед 10 состыкован с транспортным средством 12. Например, электрический велосипед 10 может состыковываться с транспортным средством 12, как указано ниже. Когда электрический велосипед 10 состыкован, вычислительное устройство 28 электрического велосипеда 10 может осуществлять связь с устройством 202 пользовательского ввода транспортного средства 12 через соединение 204. Например, вычислительное устройство 28 может обмениваться проверками состояния через соединение 204 с устройством 202 пользовательского ввода транспортного средства 12. Устройство 202 пользовательского ввода может осуществлять связь с вычислительным устройством 28 через надлежащее программное обеспечение. Автопроизводитель может также обеспечить интерфейс программирования с открытым исходным кодом для вычислительного устройства 28 велосипеда. Изготовитель может создавать и загружать свое собственное приложение в устройство 202 пользовательского ввода или изготовитель может программировать интерфейсную процедуру непосредственно в свой протокол мультимедийной связи устройства 202 пользовательского ввода.
[00185] Устройство 202 пользовательского ввода может управлять вычислительным устройством 28 через соединение 204, когда система 200 связи находится в режиме транспортного средства. Процессор 31 может быть запрограммирован для передачи информации из одного из устройства 202 пользовательского ввода и мобильного устройства 48 в другое из устройства 202 пользовательского ввода и мобильного устройства 48, когда велосипед 10 состыкован с транспортным средством 12. Устройство 202 пользовательского ввода может зеркально отражать связь из вычислительного устройства 28 в мобильное устройство 48, когда система 200 связи находится в режиме транспортного средства. Например, устройство 202 пользовательского ввода может передавать информацию, которая будет зеркально отражена через обычное соединение 204 с мобильным устройством 48, к примеру, технологию Bluetooth, USB и т.д. Устройство 202 пользовательского ввода может загружать данные в вычислительное устройство 28, в том числе парковочную информацию, информацию о пробках, информацию о платной дороге, информацию о погоде, информацию о топографии и т.д. В дистанционном режиме, мобильное устройство 48 может загружать данные в вычислительное устройство 28, в том числе парковочную информацию, информацию о топографии и т.д.
[00186] В дистанционном режиме электрический велосипед 10 может подключаться к мобильному устройству 48, и в этой конфигурации, мобильное устройство 48 может подключаться к транспортному средству 12. Другими словами, вычислительное устройство 28 может осуществлять связь непосредственно с мобильным устройством 48. Связь между вычислительным устройством 28 и мобильным устройством 48 может быть проводной и/или беспроводной связью. Если мобильное устройство 48 находится в транспортном средстве 12, то мобильное устройство 48 может также осуществлять связь с мобильным устройством и отправлять, принимать и/или сцеплять данные электрического велосипеда 10 в устройство 202 пользовательского ввода.
[00187] Когда система 200 связи работает в дистанционном режиме, как показано на фиг. 26А и 26B, мобильное устройство 48 может подключаться к электрическому велосипеду 10, например, через соединение 204. В дистанционном режиме вычислительное устройство 28 электрического велосипеда 10 может осуществлять связь с мобильным устройством 48 через соединение 204. Например, вычислительное устройство 28 может обмениваться проверками состояния через соединение 204 с мобильным устройством 48 транспортного средства 12. Мобильное устройство 48 может управлять вычислительным устройством 28 через соединение 204, когда система 200 связи находится в дистанционном режиме. Мобильное устройство 48 может зеркально отражать связь из вычислительного устройства 28 в устройство 202 пользовательского ввода, когда система 200 связи находится в дистанционном режиме. Например, мобильное устройство 48 может передавать информацию, которая будет зеркально отражена через обычное соединение 204 с устройством 202 пользовательского ввода, к примеру, по технологии Bluetooth, USB и т.д.
[00188] Как изложено выше система 200 связи может автоматически переключаться между режимом транспортного средства и дистанционным режимом. Управление вычислительным устройством 28 передается из устройства 202 пользовательского ввода в мобильное устройство 48, когда электрический велосипед 10 удаляется из транспортного средства 12, и управление вычислительным устройством 28 передается из мобильного устройства 48 в устройство 202 пользовательского ввода, когда электрический велосипед 10 вводится в транспортное средство 12.
[00189] Соединение 204 может быть выполнено с возможностью осуществления связи как с устройством 202 пользовательского ввода, так и с мобильным устройством 48. Одно и то же соединение 204 может быть совместимым как с устройством пользовательского ввода 202, так и с мобильным устройством 48 и, таким образом, идентичное соединение 204 может использоваться как в режиме транспортного средства, так и в дистанционном режиме, тем самым сокращая затраты за счет использования одного соединения 204. Общее соединение 204 также обеспечивает, что любые события или обновления могут передаваться непосредственно из мобильного устройства 48 в транспортное средство 12 и/или от транспортного средства 12 в мобильное устройство 48, когда управление вычислительным устройством 28 переключается между транспортным средством 12 и мобильным устройством 48.
[00190] Как изложено выше система 200 связи может включать в себя вычислительное устройство 28, включающее в себя процессор 31 и запоминающее устройство 29. Запоминающее устройство может хранить команды, содержащие программный код, чтобы обнаруживать, когда велосипед 10 состыкован с транспортным средством 12, и обнаруживать, когда велосипед 10 отстыкован от транспортного средства 12. Команды содержат программный код для того, чтобы осуществлять связь с устройством 202 пользовательского ввода транспортного средства 12, когда велосипед 10 состыкован с транспортным средством 12, и осуществлять связь с мобильным устройством 48, когда велосипед 10 отстыкован от транспортного средства 12. Как изложено выше данные могут касаться по меньшей мере одного из заряда аккумулятора, запаса хода, проверки разложенного состояния рамы, давления в шинах и активной системы безопасности.
[00191] Команды могут содержать программный код для того, чтобы автоматически переключать связь с вычислительным устройством 28 от устройства 202 пользовательского ввода транспортного средства 12 в мобильное устройство 48, когда велосипед 10 отстыкован от транспортного средства 12. Альтернативно, или помимо этого, как изложено выше, команды могут включать в себя программный код для того, чтобы вручную переключать связь с вычислительным устройством 28 от устройства 202 пользовательского ввода транспортного средства 12 в мобильное устройство 48, например, посредством ввода в мобильное устройство 48 и/или устройства 202 пользовательского ввода транспортного средства 12.
[00192] Аналогично, команды могут содержать программный код для того, чтобы автоматически переключать связь с вычислительным устройством 28 от мобильного устройства 48 в устройство 202 пользовательского ввода транспортного средства 12, когда велосипед 10 состыкован с транспортным средством 12. Альтернативно, или помимо этого, как изложено выше, команды могут включать в себя программный код для того, чтобы вручную переключать связь с вычислительным устройством 28 от мобильного устройства 48 в устройство 202 пользовательского ввода транспортного средства 12, например, посредством ввода в мобильное устройство 48 и/или устройство 202 пользовательского ввода транспортного средства 12.
[00193] Команды могут содержать программный код для того, чтобы осуществлять связь от одного из устройства 202 пользовательского ввода транспортного средства 12 и мобильного устройства 48 в другое из устройства 202 пользовательского ввода и мобильного устройства 48, когда велосипед 10 состыкован с транспортным средством 12. Другими словами, как изложено выше, когда система 200 связи находится в режиме транспортного средства, данные могут передаваться между мобильным устройством 48 и устройством 202 пользовательского ввода транспортного средства 12. Команды могут содержать программный код для обеспечения трехсторонней связи между устройством 202 пользовательского ввода транспортного средства 12, вычислительным устройством 28 велосипеда 10 и мобильным устройством 48, т.е. могут обеспечивать возможность осуществления связи из любого из устройства 202 пользовательского ввода транспортного средства, вычислительного устройства 28 велосипеда 10 и мобильного устройства 48 с другими двумя.
[00194] Способ 350 работы системы 200 связи показан на фиг 30. Со ссылкой на фиг. 30, способ включает в себя обнаружение велосипеда 10, пристыкованного к транспортному средству 12, как показано на этапе 352.
[00195] Как показано на этапе 354, способ 350 включает в себя осуществление связи между вычислительным устройством 28 велосипеда 10 и устройством 202 пользовательского ввода транспортного средства 12, т.е. с системой 200 связи в режиме транспортного средства. Как изложено выше, эта связь может быть автоматической, как показано на фиг. 30. Альтернативно, как изложено выше эта связь может инициироваться вручную, например, посредством ввода в устройство 202 пользовательского ввода и/или мобильное устройство 48. Способ может включать в себя отображение данных на устройстве 202 пользовательского ввода транспортного средства 12, как показано на этапе 356.
[00196] В то время как система 200 связи находится в режиме транспортного средства, способ может включать в себя осуществление связи между мобильным устройством 48 и устройством 202 пользовательского ввода транспортного средства 12 и/или вычислительным устройством 28 велосипеда 10, как показано на этапе 358. Данные могут отображаться на мобильном устройстве 48, как показано на этапе 360.
[00197] Способ может включать в себя обнаружение велосипеда 10, отстыкованного от транспортного средства 12, как показано на этапе 362. Как показано на этапе 364, способ может включать в себя прекращение связи между вычислительным устройством 28 велосипеда 10 и устройством 202 пользовательского ввода транспортного средства 12 и осуществление связи между мобильным устройством 48 и вычислительным устройством 28 велосипеда 10, т.е. с системой 200 связи в дистанционном режиме. Как изложено выше эта связь, т.е. переключение с режима транспортного средства в дистанционный режим, может быть автоматической или может инициироваться вручную, например, с помощью ввода в мобильное устройство 48 и/или устройство 202 пользовательского ввода. Эти данные могут отображаться на мобильном устройстве 48, как показано на этапе 366. Как показано на фиг. 30, способ может повторно начинаться, если состыковка велосипеда 10 с транспортным средством 12 обнаруживается снова, в то время как система связи находится в дистанционном режиме. Переключение системы 200 связи из дистанционного режима в режим транспортного средства может быть автоматическим, когда состыковка велосипеда 10 с транспортным средством 12 обнаруживается.
[00198] Со ссылкой на фиг. 29, когда электрический велосипед 10 состыкован с транспортным средством 12, источник питания транспортного средства 12, например, аккумулятор 206, может заряжать аккумулятор 26 электрического велосипеда 10. В качестве одного примера, как показано на фиг. 26B и 27, транспортное средство 12 может включать в себя систему 208 стыковки, имеющую рычаг 210 подъема для соединения с и подъема электрического велосипеда 10 в транспортное средство 12. Со ссылкой на фиг. 32, рычаг 210 подъема может иметь электрические соединения 212 в соединении с аккумулятором 206 транспортного средства 12. Электрические соединения 212 рычага 210 подъема могут сопрягаться с электрическими соединениями 214 электрического велосипеда 10, например, в вилке 68 или подседельном штыре 76 электрического велосипеда 10, чтобы электрически соединять аккумулятор 206 транспортного средства 12 с электрическим велосипедом 10. Электрические соединения 214 электрического велосипеда 10 могут поддерживать связь с аккумулятором 26 электрического велосипеда 10.
[00199] Устройство 202 пользовательского ввода и/или мобильное устройство 48 транспортного средства 12 может поддерживать связь с электрическим соединением 212 рычага 210 подъема для мониторинга и/или отображения состояния заряда аккумулятора 26 электрического велосипеда 10. Устройство 202 пользовательского ввода и/или мобильное устройство 48 может поддерживать связь с вычислительным устройством 28 электрического велосипеда 10 через рычаг 210 подъема, чтобы отслеживать и/или отображать давление в шинах, состояние заряда аккумулятора 26, запас хода, состояние тормозных колодок и т.д.
[00200] Система стыковки может иметь любой подходящий тип. Например, система стыковки может быть такой, как раскрыто в заявке на патент США № 14/337,283, поданной 22 июля 2014 г. и озаглавленной "Internal Vehicle Docking Arm and Storage", которая включена в настоящий документ путем ссылки.
[00201] Как изложено выше, аккумулятор 26 может поддерживаться в подседельной трубе 82 подседельного штыря 76 узла 18 сиденья, который может быть съемным со штыря 80. Со ссылкой на фиг. 34, транспортное средство 12 может включать в себя зарядную консоль 90 транспортного средства для приема подседельной трубы 82 подседельного штыря 76, чтобы соединяться с и заряжать аккумулятор 26. Зарядная консоль 90 транспортного средства может, например, быть расположена на центральной консоли транспортного средства 12. Зарядная консоль 90 транспортного средства может подключаться к шине CAN транспортного средства 12. Шина CAN может отслеживать состояние заряда аккумулятора 26 электрического велосипеда 10.
[00202] Аккумулятор 26 электрического велосипеда 10 может подавать мощность в транспортное средство 12 через зарядную консоль 90 транспортного средства. Например, в случае, если аккумулятор 206 транспортного средства 12 разряжен, аккумулятор 26 электрического велосипеда 10, может соединяться с зарядной консолью 90 транспортного средства, чтобы подавать питание для аварийного сигнала, внутреннего освещения, автоматических блокировок, автоматических окон и т.д. Аккумулятор 26 электрического велосипеда 10 может использоваться, чтобы подтолкнуть транспортное средство 12 и/или для импульсного подзаряда аккумулятора 206 транспортного средства 12.
[00203] Транспортное средство 12 может использовать навигационные данные, например, покрытие SATNAV для вычисления запаса хода на основании состояния заряда аккумулятора 26. Транспортное средство 12 может извещать водителя, например, через устройство 202 пользовательского ввода, когда транспортное средство 12 находится на достаточном расстоянии, чтобы припарковать транспортное средство 12 и достичь пункта назначения на электрическом велосипеде 10 с мощностью аккумулятора 26 на основании состояния заряда аккумулятора 26.
[00204] Аккумулятор 26 может заряжаться с использованием внешней зарядной консоли 91 (показанной на фиг. 26B, 27 и 35), например, настольного зарядного устройства. Внешняя зарядная консоль 91 может питаться, например, через настенное электрическое гнездо, через USB-подключение 204 на персональном компьютере или переносном компьютере и т.д. Например, внешний зарядный модуль может быть выполнен с возможностью принимать подседельную трубу 82 подседельного штыря 76 узла 18 сиденья. Внешняя зарядная консоль 91 может включать в себя индикаторы, к примеру, световые, которые указывают состояние заряда аккумулятора 26.
[00205] В альтернативе режиму транспортного средства, вычислительное устройство 28 электрического велосипеда 10 может быть по выбору соединено и отсоединено от транспортного средства 12 и/или мобильного устройства 48, как показано на фиг. 27. В этой конфигурации, вычислительное устройство 28 и аккумулятор 26 могут быть размещены в штыре 80 подседельного штыря 76. С дальнейшей ссылкой на фиг. 27, штырь 80, в комбинации с остальной частью электрического велосипеда 10 или отдельно от остальной части электрического велосипеда 10, может состыковываться с транспортным средством 12. Например, штырь 80 может удаляться от остальной части электрического велосипеда 10 и состыковываться с зарядной консолью 90 транспортного средства, как показано на фиг. 34. Альтернативно, как показано на фиг. 27, штырь 80 может состыковываться с внешним зарядным устройством 91 (также показано на фиг. 35).
[00206] Когда подключается к зарядной консоли 90 транспортного средства или внешнему зарядному устройству 91, аккумулятор 26 и/или вычислительное устройство 28 осуществляет связь с зарядной консолью 90 транспортного средства и внешним зарядным устройством 91, соответственно. В частности, когда штырь 80 состыкован с зарядной консолью 90 транспортного средства, данные отправляются в устройство 202 пользовательского ввода. Устройство 202 пользовательского ввода может совмещать эти данные с запланированным пунктом назначения поездки и передавать информацию через пользовательский интерфейс 218 о том, достаточно ли заряда в аккумуляторе, и позволять пользователю выбирать варианты, например, включать режим снижения потливости и т.д. Эти данные затем зеркально отображаются в мобильное устройство 48, когда пользователь выходит из транспортного средства 12. Система затем остается в режиме заряда, несмотря на то, что удалена из транспортного средства 12. Мобильное устройство 48 все еще использует последнее соединение аккумулятора 28 с транспортным средством 12 и экстраполированное использование аккумулятора и все пользовательские выборы. В соответствии с вычислениями устройства 202 пользовательского ввода и пользовательскими выборами, мобильное устройство 48 может затем использовать характеристику местоположения (например, GPS) мобильного устройства 48, чтобы совмещать с предварительно программируемой поездкой (зеркально отраженной из устройства 202 пользовательского ввода при выходе), чтобы инструктировать пользователя, в какой точке в поездке какие настройки мощности на электрическом велосипеде 10 должны использоваться. Аналогично, в обратной поездке, если аккумулятор 26 состыковывался и заряжается внешним зарядным устройством 91, то внешнее зарядное устройство 91 может подключаться к мобильному устройству, чтобы обновлять прогнозирование расстояния для корректного управления предварительно программируемой обратной поездкой.
[00207] Альтернативно, на фиг. 27, мобильное устройство 48 может обрабатывать все данные. В ходе движения транспортного средства 12, мобильное устройство 48 принимает пункт назначения поездки от транспортного средства 12 и состояние заряда электрического велосипеда 10 и состояние работоспособности. В этой конфигурации, все вычисления могут выполняться на мобильном устройстве 48.
[00208] Со ссылкой на фиг. 36, электрический велосипед 10 может включать в себя световой источник 220 для освещения зоны вокруг электрического велосипеда 10 на поверхности движения. Световой источник 220 может быть, например, светодиодным, к примеру, светодиодами на 5 Вт, или лазерным, к примеру, щелевыми лазерами на 1 Вт. Световой источник 220 может включать в себя четыре световых источника 220, т.е. один для каждого из переднего левого, переднего правого, заднего левого и заднего правого квадрантов транспортного средства 12. Световой источник 220 может быть оранжевым и/или красным. Световой источник 220 может использоваться во время ухудшенной видимости или ночью.
[00209] Световой источник 220 может использоваться непрерывно, при повороте, во время резкого отклонения в сторону и/или во время экстренного торможения. Световой источник 220 может использоваться непрерывно в ходе работы, чтобы идентифицировать безопасную зону вокруг электрического велосипеда 10, например, указывая зону, которая не должна быть пересечена другими водителями. Эта безопасная зона движется с электрическим велосипедом 10. Освещенная поверхность движения обеспечивает увеличенную площадь освещаемой поверхности, что увеличивает видимость. Освещенная поверхность движения может также подсвечивать неидеальность поверхности движения.
[00210] Световой источник 220 может использоваться при повороте, чтобы освещать зону в сторону направления поворота. При повороте этот световой источник 220 может мигать и может быть янтарным по цвету. Работа световых источников 220 во время поворота может управляться с помощью переключателя на руле, например, вращающегося переключателя, или отдельного рычажного переключателя включения/отключения. Во время резкого отклонения в сторону и/или во время экстренного торможения, световые источники 220, идентифицирующие зону на поверхности движения, могут мигать или изменять цвет.
[00211] Со ссылкой на фиг. 37, велосипед 10 может включать в себя систему 67, включающую в себя устройство визуальной, звуковой и/или тактильной обратной связи, чтобы выдать предупреждение пассажиру велосипеда 10. Другими словами, со ссылкой на фиг. 38, система 67 может быть системой помощи в уклонении в сторону для указания водителю, едущему на электрическом велосипеде 10, когда приближается обгоняющее транспортное средство 222, как показано на фиг. 40. Следует принимать во внимание, что значения, приведенные на фиг. 39, приведены лишь для примера.
[00212] Со ссылкой на фиг. 38, как изложено выше, пассажиры могут совместно использовать полосу движения дороги с другими транспортными средствами 222, к примеру, автомобилями. Другие транспортные средства 222 могут двигаться быстрее, чем пассажир, таким образом вынуждая пассажира ехать по боковой стороне дороги, чтобы давать возможность другим транспортным средствам 222 проезжать. Тем не менее, сторона дороги может включать в себя препятствия, к примеру, выбоины, крышки люка, мусор, другие велосипеды, гуляющих пешеходов и т.д. В связи с этим, пассажиру, вероятно, время от времени, придется отклоняться с боковой стороны дороги на середину дороги. Система помощи в уклонении в сторону идентифицирует, когда обгоняющие транспортные средства 222 присутствуют, и сообщает о присутствии обгоняющего транспортного средства 222 водителю, чтобы указывать водителю, что столкновение с обгоняющим транспортным средством 222 может случиться, если водитель не отклонится в сторону.
[00213] Руль 66, например, может включать в себя генераторы 71 вибрации для вибрации по выбору, чтобы обеспечить водителю тактильное указание. Генераторы 71 вибрации могут поддерживаться посредством руля 66. В частности, один генератор 71 вибрации может располагаться в каждой левой стороне и правой стороне руля 66 для обеспечения вибрации в левую руку и правую руку пассажира, соответственно. Работа генераторов 71 вибрации дает возможность пассажиру оставаться зрительно сфокусированным на дороге и дорожном движении. Генераторы 71 вибрации могут иметь любой подходящий тип.
[00214] Система 67 может одна, или в комбинации с другими системами, сканировать пространство перед электрическим велосипедом 10, чтобы предупреждать водителя о находящихся впереди препятствиях, чтобы помогать водителю заранее регулировать скорость и/или предпринимать маневрирование. Система 67 может также вычислять, что отклонение в сторону, торможение или столкновение является самым безопасным вариантом. Система 67 может сообщать водителю о самом безопасном варианте и/или может инициировать отклик.
[00215] Система 67 может включать в себя один или несколько датчиков, чтобы обнаруживать транспортные средства и/или другие препятствия на дороге. Например, система 67 может включать в себя датчик 69, выполненный с возможностью считывания обгоняющего транспортного средства, например транспортного средства, движущегося быстрее, чем велосипед 10, и проходящего велосипед 10 сзади, как схематично показано на фиг. 40. Датчик 69 может быть обращен назад, чтобы обнаруживать обгоняющие транспортные средства. Датчик 69 может быть ультразвуковым датчиком или любым другим подходящим типом датчика. Датчик 69 может, например, поддерживаться посредством рамы 14 велосипеда 10.
[00216] Помимо этого, или в качестве альтернативы, система 67 может включать в себя другой датчик 75, выполненный с возможностью обнаружения находящихся впереди препятствий, например, транспортных средств, выбоин, крышек люков, мусора, других велосипедов, идущих пешеходов и т.д. Датчик 75 может быть обращен вперед, чтобы обнаруживать находящееся впереди препятствие. Датчик 75 может быть ультразвуковым датчиком или любым другим подходящим типом датчика. Датчик 75 может, например, поддерживаться посредством рамы 14 велосипеда 10.
[00217] Система 67 может включать в себя контроллер 73, выполненный с возможностью активации генераторов 71 вибрации, когда датчик 69 обнаруживает обгоняющее транспортное средство и/или когда датчик 75 обнаруживает находящееся впереди препятствие. Контроллер 73, например, может быть вычислительным устройством 28, как указано дополнительно ниже. Как изложено выше вычислительное устройство 28 может включать в себя процессор 31 и запоминающее устройство 29. Альтернативно, контроллер 73 может иметь любой подходящий тип.
[00218] Контроллер, например, вычислительное устройство 28, может быть запрограммирован так, чтобы побуждать генератор 71 вибрации вибрировать по меньшей мере с одной заданной амплитудой и заданным режимом, когда вычислительное устройство 28 оценивает, что обгоняющее транспортное средство достигнет велосипеда 10 до того, как велосипед 10 достигнет находящегося впереди препятствия. Инициирование и длительность вибрации на каждой стороне рулей 66 могут определяться на основании тактильного навигационного кода. Один пример инициирования и длительность вибрации для различных условий показаны на фиг 39.
[00219] Аналогично, контроллер, например, вычислительное устройство 28, может быть запрограммирован, чтобы оценивать, достигнет ли велосипед 10 находящегося впереди препятствия, прежде чем обгоняющее транспортное средство достигнет велосипеда 10. Контроллер, например, вычислительное устройство 28, оценивает на основании сравнения расстояния и скорости сближения обгоняющего транспортного средства с расстоянием и скоростью приближения находящегося впереди препятствия. Контроллер, например, вычислительное устройство 28, может выполнять контур обратной связи для оценки.
[00220] На основании скорости электрического велосипеда 10 и расстояния от обгоняющего транспортного средства 222, процессор данных применяет алгоритм, чтобы определять, сможет ли водитель отклониться в сторону или не сможет и должен сохранять положение, проезжая по боковой стороне дороги. В частности, алгоритм сигнального процессора может сравнивать данные от датчиков 69, 75 с предварительно запрограммированными сценариями и непрерывно выводить одно из двух состояний сигнала: «Да» - можно отклониться в сторону или «Нет» - нельзя отклоняться в сторону. Состояния сигнала передаются водителю визуально, например, в виде светящейся полосы вокруг рулей, тактильно, например, посредством вибрации рулей, к примеру, с помощью генераторов вибрации, изложенными выше, и/или в звуковой форме, например, подавая звуковой сигнал.
[00221] Контроллер, например, вычислительное устройство 28, может быть запрограммирован для вычисления инструкции для выполнения одного из отклонения в сторону, торможения, столкновения с находящимся впереди препятствием и столкновения с обгоняющим транспортным средством. В частности, контроллер, например, вычислительное устройство 28, может быть запрограммирован, чтобы побуждать генератор 71 вибрации вибрировать по меньшей мере с одной заданной амплитудой и заданным режимом, чтобы идентифицировать инструкцию для выполнения одного из отклонения в сторону, торможения, столкновения с находящимся впереди препятствием и столкновения с обгоняющим транспортным средством 222.
[00222] Вибрация генераторов 71 вибрации может быть комбинирована с визуальными инструкциями, отображаемыми на мобильном устройстве 48. Как изложено выше, мобильное устройство 48 может представлять собой мобильный телефон. Альтернативно, мобильное устройство 48 может быть любого подходящего типа. В дополнение к, или в качестве альтернативы к, тактильному предупреждению, контроллер, например, вычислительное устройство 28, может побуждать мобильное устройство 48 визуально отображать предупреждение, например, с текстом, графикой и т.д. Водитель может выбирать или удалять предупреждение и может изменять пороговое значение для таких предупреждений через графический пользовательский интерфейс мобильного устройства 48. Такие предупреждения, например, могут включать в себя давление в шинах, уровень износа тормозных колодок, температуру аккумулятора и/или электромотора, некорректную фиксацию при раскладывании, обнаружение сонливости и т.д.
[00223] Помимо этого, или в качестве альтернативы, мобильное устройство 48 может принимать входящую связь, например, телефонный вызов, текстовое сообщение, электронную почту и т.д., может инструктировать систему 67 о входящей связи. Контроллер системы 67, например, вычислительное устройство 28, может быть выполнен с возможностью приема команды из мобильного устройства 48, указывающей на входящее сообщение и, в ответ, может быть выполнен с возможностью побуждать генераторы 71 вибрации вибрировать, чтобы оповещать водителя о входящем сообщении.
[00224] Помимо этого, или в качестве альтернативы, мобильное устройство 48 может обеспечивать помощь в навигации на графическом пользовательском интерфейсе мобильного устройства 48. В этой конфигурации, мобильное устройство 48 может осуществлять связь с вычислительным устройством 28, и вычислительное устройство 28 может, в свою очередь, побуждать генераторы 71 вибрации вибрировать, чтобы идентифицировать навигационные направления, интересующие точки (например, зарядные станции, кафе и т.д.) и т.д.
[00225] Система 67 может включать в себя источник света, например, световой источник 220. Контроллер, например, вычислительное устройство 28, может быть выполнен с возможностью подсвечивать источник света, когда датчик 69 обнаруживает обгоняющее транспортное средство 222. Это освещение может оповещать водителя обгоняющего транспортного средства 222 о присутствии велосипеда 10. Например, система помощи в уклонении в сторону может использоваться, чтобы предупреждать обгоняющее транспортное средство 222, что водитель вскоре будет вынужден отклоняться в сторону вследствие находящегося впереди препятствия. Например, световой источник, например, световой источник 220, на электрическом велосипеде 10 может мигать, освещать область дороги, на которую водитель должен отклониться в сторону и т.д. Электрический велосипед 10 может издавать звуковое предупреждение, к примеру, гудок, чтобы оповещать обгоняющее транспортное средство 222.
[00226] Система 67 может быть выполнена с возможностью обеспечивать водителю инструкцию для кручения педалей , например ритм кручения педалей, через генераторы 71 вибрации. Например, контроллер, например вычислительное устройство 28, может быть выполнен с возможностью побуждать генераторы 71 вибрации вибрировать медленно, чтобы указывать водителю замедлить кручение педалей, и может вибрировать быстро, чтобы указывать водителю ускорить кручение педалей. Например, вычислительное устройство 28 может выдавать эти инструкции, чтобы замедлить или ускорить кручение педалей, чтобы сохранить темп, сохранить режим тренировки, сохранить время работы от аккумулятора и т.д.
[00227] Система 67 может обеспечивать защиту велосипеду 10. Например, система 67 может быть выполнена с возможностью обнаружения несанкционированного использования, и в ответ контроллер, например вычислительное устройство 28, может быть выполнен с возможностью выдачи генераторам 71 вибрации команды вибрировать на некомфортной частоте, чтобы остановить несанкционированное использование. Помимо этого, система 67 может издавать сигнальный гудок и/или может увеличивать сопротивление приводного механизма.
[00228] Со ссылкой на фиг. 37, в конфигурации, где контроллер системы 67 является вычислительным устройством 28, запоминающее устройство 29 вычислительного устройства 28 может включать в себя команды, включающие в себя программный код для того, чтобы принимать данные от датчика 69, указывающие, что обгоняющее транспортное средство 222 приближается к велосипеду 10, как показано на этапе 320 на фиг. 38. Как показано на этапе 322, команды могут включать в себя программный код для того, чтобы побуждать генератор 71 вибрации вибрировать, когда датчик 69 обнаруживает обгоняющее транспортное средство 222.
[00229] Со ссылкой на фиг. 38, как показано на этапе 324, команды могут также включать в себя программный код для того, чтобы принимать данные от датчика 75 указывающие, что велосипед приближается к находящемуся впереди препятствию. Как показано на этапе 326, команды включают в себя программный код для того, чтобы оценивать, достигнет ли велосипед 10 находящегося впереди препятствия прежде, чем обгоняющее транспортное средство 222 достигнет велосипеда 10. Эта оценка может быть основана на сравнении расстояния и скорости сближения обгоняющего транспортного средства 222 с расстоянием и скоростью приближения находящегося впереди препятствия, как показано на этапе 328. Как показано на фиг. 37, команды могут включать в себя программный код для того, чтобы выполнять контур обратной связи для оценки, т.е. многократно сравнивать расстояние и скорость сближения обгоняющего транспортного средства 222 с расстоянием и скоростью приближения находящегося впереди препятствия в повторяющемся временном интервале.
[00230] Как показано на этапе 322, команды могут включать в себя программный код для того, чтобы побуждать генератор 71 вибрации вибрировать по меньшей мере с одной заданной амплитудой и заданным режимом, когда контроллер, например, вычислительное устройство 28, оценивает, что обгоняющее транспортное средство 222 достигнет велосипеда 10 прежде, чем велосипед 10 достигнет находящегося впереди препятствия. В частности, команды могут включать в себя программный код для вычисления инструкции для водителя на выполнение одного из отклонения в сторону, торможения, столкновения с находящимся впереди препятствием и столкновения с обгоняющим транспортным средством 222. В частности, команды могут включать в себя программный код, побуждающий генератор 71 вибрации вибрировать по меньшей мере с одной заданной амплитудой и заданным режимом, чтобы идентифицировать инструкцию для выполнения одного из отклонения в сторону, торможения, столкновения с находящимся впереди препятствием и столкновения с обгоняющим транспортным средством 222. Другими словами, каждой инструкции для водителя, например, отклонению в сторону, торможению, столкновению с находящимся впереди препятствием, столкновению с обгоняющим транспортным средством 222, может назначаться уникальная и заданная амплитуда и/или режим вибрации. Водитель велосипеда 10 может быть ознакомлен с уникальной и заданной амплитудой и/или режимом вибрации, например, из руководства владельца и может принимать соответствующие меры на основании вибрации.
[00231] Как показано на этапе 330, команды могут включать в себя программный код для того, чтобы подсвечивать источник света, например, световой источник 220, когда датчик 69 обнаруживает обгоняющее транспортное средство 222. Например, команды могут включать в себя программный код для того, чтобы увеличивать интенсивность и/или темп мигания световых источников 220 по мере того, как обгоняющее транспортное средство 222 придвигается ближе к велосипеду 10. Как изложено выше, освещение может оповещать водителя обгоняющего транспортного средства 222 о присутствии велосипеда 10.
[00232] Как показано на этапе 332, команды могут включать в себя программный код для осуществления связи с мобильным устройством. Например, как изложено выше, визуальные команды могут отображаться на мобильном устройстве 48, например, мобильном телефоне. В частности, команды могут включать в себя программный код для того, чтобы побуждать мобильное устройство 48 визуально отображать предупреждение, например, с текстом, графикой и т.д. Как изложено выше, водитель может выбирать или удалять предупреждение и может изменять пороговое значение для таких предупреждений через графический пользовательский интерфейс мобильного устройства 48.
[00233] Команды могут включать в себя программный код для того, чтобы принимать идентификацию входящего сообщения от мобильного устройства, например, телефонный вызов, текстовое сообщение, электронную почту и т.д. и могут побуждать генераторы 71 вибрации вибрировать, чтобы оповещать водителя о входящем сообщении.
[00234] Помимо этого, или в качестве альтернативы, команды могут включать в себя программный код для того, чтобы принимать навигационные инструкции от мобильного устройства 48. В этой конфигурации, мобильное устройство 48 может осуществлять связь с вычислительным устройством 28, и вычислительное устройство 28 может включать в себя команды, которые включают в себя программный код для того, чтобы побуждать генераторы 71 вибрации вибрировать, чтобы идентифицировать навигационные направления, интересующие точки (например, зарядные станции, кафе и т.д.) и т.д.
[00235] Команды могут включать в себя программный код для того, чтобы побуждать генератор вибрации вибрировать по меньшей мере с одной из различных частот и различных длительностей, когда датчик 69 обнаруживает отсутствие обгоняющего транспортного средства и датчик 75 обнаруживает отсутствие находящегося впереди препятствия. Например, в отсутствие обгоняющего транспортного средства и находящегося впереди препятствия, команды могут включать в себя программный код для выдачи водителю инструкции для кручения педалей, например, ритм кручения педалей, через генераторы 71 вибрации. Например, команды могут включать в себя программный код для выдачи генераторам 71 вибрации команды вибрировать относительно медленно, чтобы указывать водителю замедлить кручение педалей, и могут вибрировать относительно быстро, чтобы указывать водителю ускорить кручение педалей. Например, вычислительное устройство 28 может выдавать эти команды, чтобы замедлить или ускорить кручение педалей, чтобы сохранять темп, сохранять режим тренировки, сохранять время работы от аккумулятора и т.д.
[00236] Система 67 может обеспечивать защиту велосипеду 10. Например, команды могут включать в себя программный код для приема указания того, что велосипед 10 используется неавторизованным пользователем, и могут включать в себя программный код для выдачи генераторам 71 вибрации команды вызывать вибрацию на некомфортной частоте, например на относительно высокой частоте и амплитуде, чтобы остановить несанкционированное использование. Помимо этого, команды могут включать в себя программный код для испускания сигнального гудка, и/или могут увеличивать сопротивление приводного механизма.
[00237] Как изложено выше, штырь 80 подседельного штыря 76 узла 18 сиденья может удаляться из подседельной трубы 82. Со ссылкой на фиг. 41 и 42, штырь 76 может включать в себя интегрированную систему 230 освещения для обеспечения пользователю света, когда штырь 80 подседельного штыря 76 удален. Система 230 освещения может использоваться для обеспечения освещения для складывания/раскладывания рамы 14, для обеспечения безопасности, обеспечения аварийного дорожного света (т.е. выступить в качестве вспышки) и т.д.
[00238] Как изложено выше, аккумулятор 26 может поддерживаться посредством штыря 80. В этой конфигурации аккумулятор 26 может снабжать энергией систему 230 освещения.
[00239] Как показано на фиг. 42, система 230 освещения может включать в себя источник 232 света, поддерживаемый посредством штыря 76 и подключаемый к источнику мощности, например, аккумулятору 26. Источник 232 света, например, может быть светодиодной полосой, имеющей двухцветные светодиоды, например, красный и белый. Другими словами, источник 232 света может включать в себя источник 237 красного света и источник 235 белого света, например, красные и белые светодиоды. В данном примере, источник 237 красного света и источник 235 белого света могут быть скомбинированы в одном двухцветном светодиоде. Альтернативно, источник 237 красного света может быть красным светодиодом и источник 235 белого света может быть отдельным белым светодиодом.
[00240] Источник 232 света может светиться по выбору, когда штырь 80 зацепляется с подседельной трубой 82 и когда штырь 80 расцепляется с подседельной трубой 82. Например, источник 235 белого света может светиться по выбору, когда штырь 76 расцепляется с подседельной трубой 82, для использования в качестве фонаря, и источник 237 красного света может светиться по выбору, когда штырь 80 зацепляется с подседельной трубой 82, для использования в качестве стоп-сигнала.
[00241] Система 230 освещения может включать в себя датчик, например, индуктивный датчик 234 приближения, выполненный с возможностью обнаружения зацепления штыря 80 с подседельной трубой 82. Например, когда штырь 80 вставляется в подседельную трубу 82, индуктивный датчик 234 приближения обнаруживает штырь 80, например, штырь 80 может формироваться из алюминия или стали, и индуктивный датчик 234 приближения может обнаруживать алюминий или сталь. Когда индуктивный датчик 234 приближения обнаруживает штырь 80, логика схемы в фонаре подсвечивает красные светодиоды.
[00242] Когда штырь 80 зацепляется с подседельной трубой 82, источник 232 света работает в качестве обращенного назад стоп-сигнала. В этой конфигурации, когда штырь 80 зацепляется с подседельной трубой 82, источник 232 света может поддерживать связь с вычислительным устройством 28, например, через проводную или беспроводную связь. В этой конфигурации, вычислительное устройство 28 может подсвечивать светящуюся полосу 264 аналогичным образом как изложено выше относительно стоп-сигнала 143, и светящаяся полоса 264 может работать одновременно со стоп-сигналом 143.
[00243] Когда подседельная труба 82 удаляется из штыря 80, индуктивный датчик 234 приближения не может обнаруживать штырь 80, и логика схемы зажигает белые светодиоды. Со ссылкой на фиг. 41 и 42, система 230 освещения может включать в себя переключатель 238, который функционирует в качестве выключателя для соединения/разъединения аккумулятора 26 и источника 235 света.
[00244] Со ссылкой на фиг. 42, система 230 освещения может включать в себя контроллер 239 в соединении с датчиком 234. Контроллер 239 может быть выполнен с возможностью передачи мощности в источник 237 красного света и исключения подачи мощности в источник 235 белого света, когда датчик 234 обнаруживает зацепление штыря 80 и подседельной трубы 82. Контроллер 239 может быть выполнен с возможностью передачи мощности в источник 235 белого света и исключения подачи мощности в источник 237 красного света, когда датчик 234 обнаруживает расцепление штыря 80 и подседельной трубы 82. Другими словами, контроллер 239 может подсвечивать источник 235 белого света и источник 237 красного света посредством передачи мощности в источники 235, 237 света.
[00245] Контроллер 239 может быть, например, процессором, запрограммированным для передачи мощности в источник 237 красного света и предотвращения подачи мощности в источник 235 белого света, когда датчик 234 обнаруживает зацепление штыря 80 с трубой 82. Этот процессор может также быть запрограммирован для передачи мощности в источник 235 белого света и предотвращения подачи мощности в источник 237 красного света, когда датчик 234 обнаруживает расцепление штыря 80 и трубы 82. Переключатель 238 может поддерживать связь с контроллером 239, например, процессором, и может управляться водителем, чтобы побуждать контроллер 239 по выбору подавать мощность в источник 235 белого света, когда штырь 80 расцепляется с трубой 82. Вычислительное устройство 48, например, может поддерживать связь с контроллером 239, например, процессором, и может передавать команды в контроллер 239, чтобы по выбору передавать мощность в источник 237 красного света, когда штырь 80 зацепляется с трубой 82. Как изложено выше вычислительное устройство 28 может подсвечивать светящуюся полосу 264 аналогичным образом как изложено выше относительно стоп-сигнала 143 (как показано на фиг. 3), и светящаяся полоса 264 может работать одновременно со стоп-сигналом 143.
[00246] Со ссылкой на фиг. 43, переднее колесо 20 и/или заднее колесо 22 могут иметь конфигурацию, допускающую использование при наличии прокола. Колесо 20, 22 включает в себя небольшую внутреннюю трубку 240, накачанную воздухом и окруженную посредством твердого слоя 242 пены, который обеспечивает дополнительный защитный слой, чтобы не допустить повреждения внутренней трубки 240. Шина 244, к примеру, резиновая шина, располагается вокруг слоя 242 пены. Слой 242 пены обеспечивает защиту внутренней трубки 240 внутри нее, и воздух под давлением в трубке 240 обеспечивает водителю некоторую степень амортизации. Эта трубка 240, будучи наполненной воздухом, также уменьшает вес колеса.
[00247] Колесо является устойчивым к проколам. Например, если большой гвоздь или подобный объект, проходит через весь слой 242 пены и протыкает внутреннюю трубку 240, слой 242 пены спроектирован так, чтобы все еще иметь возможность предоставлять определенную степень функциональности пользователю. Это предоставляет возможность пользователю продолжать поездку, даже если прокол случился. Это дает возможность водителю продолжать использование электрического велосипеда 10, пока замена/восстановление не доступны.
[00248] Слой 242 пены включает в себя соединительное средство 246. Соединительное средство 246 позволяет поддерживать жесткость, даже когда внутренняя структура внутренней трубки 240 повреждена. Это соединительное средство 246 может быть пазогребневым соединением, или, в качестве альтернативы, соединением типа «ласточкин хвост», которое будет иметь возможность обеспечения поддержки при механических напряжениях, которые испытываются в проколотом состоянии.
[00249] Переднее колесо 20 и/или заднее колесо 22 может монтироваться на раме 14 с помощью гайки 250. Например, рама 14 может представлять стойку, которая принимает колесо и гайка затягивается на стойку. Гайка 250 может стопорить гайку колеса, т.е. гайку, которая выполнена с возможностью удаляться с ключом. Транспортное средство 12 может также включать в себя гайку стопорения колеса и гайку стопорения колеса на электрическом велосипеде 10, и гайка стопорения колеса на транспортном средстве 12 может оба быть выполнена с возможностью быть расстопоренной посредством идентичного ключа.
[00250] Переднее колесо 20 и заднее колесо 22 могут, например, быть колесами размерностью 12 дюймов. Этот размер обеспечивает более компактную сложенную форму и позволяет использовать меньшую оболочку 36. Колесо 20, 22, например, может быть широким для обеспечения лучших ходовых качеств на неровных дорогах, а также улучшения общего внешнего вида. Колеса 20, 22 могут быть разработаны, чтобы быть похожими на автомобильные легкосплавные колеса. Колеса могут быть отлиты под давлением или через впрыск с формованием.
[00251] Со ссылкой на фиг. 44-48, подседельный штырь 76 может быть выполнен с возможностью запоминать предпочтительное задание высоты штыря 80 относительно подседельной трубы 82 для одного или более водителей. Первый вариант осуществления памяти подседельного штыря 76 показан на фиг. 45, второй вариант осуществления памяти подседельного штыря 76 показан на фиг. 46 и третий вариант осуществления памяти подседельного штыря 76 показан на фиг. 47-48.
[00252] Со ссылкой на фиг. 44-48, узел 18 сиденья может включать в себя модуль 79 индикации, выполненный с возможностью указания первого положения штыря 80 вдоль прорези 84 (как показано на фиг. 1) для первого пользователя и второго положения штыря 80 вдоль прорези 84 для второго пользователя. Идентификационный модуль 81 выполнен с возможностью идентифицировать первого пользователя и второго пользователя. Запоминающее устройство 29 вычислительного устройства 28 может хранить такую команду , что процессор 31 вычислительного устройства 28 программируется таким образом, чтобы побуждать модуль 79 индикации указывать первое положение, когда идентификационный модуль 81 идентифицирует первого пользователя, и побуждать модуль 79 индикации указывать второе положение, когда идентификационный модуль 81 идентифицирует второго пользователя. Несмотря на то, что в данном документе упоминаются первый водитель и второй водитель, следует принимать во внимание, что запоминающее устройство 29 может хранить такую команду, что процессор, 31 вычислительного устройства 28 программируется таким образом, чтобы побуждать модуль 79 индикации указывать любое подходящее число положений для любого подходящего числа пользователей. Например, велосипед 10 может быть прокатным и может сохранять положение на каждого арендатора так, что положение узла 18 сиденья автоматически регулируется для повторных арендаторов.
[00253] Идентификационный модуль 81 может быть выполнен с возможностью считывать множество идентификаторов 83. Каждый идентификатор 83 может быть уникальным для различных водителей и может идентифицировать водителя для идентификационного модуля 81. Как показано на фиг. 44, идентификационный модуль 81 может быть выполнен с возможностью считывать любое подходящее число идентификаторов 83. Идентификационный модуль 81 может поддерживаться в узле 18 сиденья или может поддерживаться в любом другом подходящем местоположении велосипеда 10. Идентификационные данные пользователей могут храниться в идентификаторах 83 и/или в идентификационном модуле 81.
[00254] Идентификационный модуль 81 может быть датчиком приближения, выполненным с возможностью считывания идентификатора 83 на заданном расстоянии. Идентификатор 83 может быть, например, мобильным устройством 48, к примеру, сотовым телефоном, электромагнитным идентификатором, например, RFID-микросхемой и т.д. В конфигурации, где идентификатор 83 является мобильным устройством 48, мобильное устройство 48 может осуществлять связь с идентификационным модулем 81 любым подходящим способом, таким как беспроводной протокол, например, связь в ближней зоне, маломощная технология Bluetooth и т.д. В качестве альтернативы, идентификационный модуль 81 может включать в себя интерфейс ввода, например, сенсорный экран, физическую или виртуальную клавишную панель и т.д.
[00255] Со ссылкой на фиг. 44, система 269 регулирования сиденья включает в себя вычислительное устройство 28 в соединении с модулем 79 индикации и идентификационным модулем 81. Запоминающее устройство 29 вычислительного устройства 28 может хранить команды, выполняемые посредством процессора 31. Команды могут включать в себя программный код для того, чтобы принимать сигнал от одного из идентификаторов 83 и побуждать модуль 79 индикации указывать положение штыря 80 вдоль прорези 84 для водителя, идентифицированного посредством идентификатора 83. Например, команды могут включать в себя программный код для того, чтобы побуждать модуль 79 индикации указывать первое положение, когда идентификационный модуль 81 идентифицирует первого пользователя, и побуждать модуль 79 индикации указывать второе положение, когда идентификационный модуль 81 идентифицирует второго пользователя.
[00256] Со ссылкой на фиг. 45, модуль 79 индикации первого варианта осуществления памяти подседельного штыря 76 может быть механической блокировкой, зацепляющей штырь 80 с подседельной трубой 82. В частности, первый вариант осуществления включает в себя ступеньку 262, например, защелку 262, регулируемым образом соединяемую со штырем 80 и выполненную с возможностью размещения штыря 80 относительно подседельной трубы 82. Ступенька 262 может фиксироваться на штыре 80 и может иметь форму, чтобы захватывать подседельную трубу 82, чтобы останавливать движение штыря 80 в подседельную трубу 82. Ступенька 262 может фиксироваться на штыре 80 любым подходящим способом. Например, ступенька 262 может быть механически зафиксирована на штыре 80, магнитно зафиксирована на штыре 80 и т.д.
[00257] Модуль 79 индикации первого варианта осуществления может включать в себя направляющее приспособление 263, заданное в одном из штыря 80 и подседельной трубы 82. Ступенька 262 сдвижным образом зацепляется с направляющим приспособлением 263. Модуль 81 индикации может включать в себя электромотор 265, зацепленный со ступенькой 262 и выполненный с возможностью перемещения ступеньки 262 вдоль направляющего приспособления 263. Электромотор 265 может зацепляться со ступенькой 262 любым подходящим способом, например, через резьбовой стержень 267, червячный привод, реечную передачу и т.д. Штырь 80 и/или электромотор 265 выполнен с возможностью отслеживать положение ступеньки 262 вдоль направляющего приспособления 263, например, с помощью датчиков на эффекте Холла, датчиков положения и т.д., так, что электромотор 265 может перемещать ступеньку 262 в надлежащее положение вдоль направляющего приспособления 263, когда на это выдана команда посредством вычислительного устройства 28.
[00258] Программный код в запоминающем устройстве 29 может включать в себя программный код для выдачи команды на приведение в действие механической блокировки в первого положения для первого водителя, когда идентификационный модуль 81 идентифицирует первого водителя, и приведение в действие механической блокировки во втором положении, когда идентификационный модуль 81 идентифицирует второго водителя. Например, запоминающее устройство 29 может включать в себя программный код для выдачи команды на приведение в действие электромотора 265, чтобы перемещать ступеньку 262 в надлежащее положение вдоль направляющего приспособления 263, когда на это выдана команда посредством вычислительного устройства 28.
[00259] Как показано на фиг. 45, вторая механическая блокировка 85 может зацеплять штырь 80 и подседельную трубу 82. Вторая механическая блокировка 85 может включать в себя рычаг, как показано на фиг. 46, который является поворотным посредством водителя между незастопоренным положением, позволяя перемещать штырь 80 в любое положение, разрешенное ступенькой 262, и застопоренным положением, блокируя штырь 80 относительно подседельной трубы 82. Другими словами, ступенька 262 может позиционировать штырь 80 относительно подседельной трубы 82 и, когда водитель сидит на седле 78, вес водителя прижимает ступеньку 262 к подседельной трубе 82. Вторая механическая блокировка 85 блокирует штырь и подседельную трубу 82 в этом относительном положении. Вторая механическая блокировка 85 может быть, например, блокировкой сжатия, поддерживаемой посредством штыря 80, и она сжимает подседельную трубу 82, чтобы стопорить штырь 80 в подседельной трубе 82.
[00260] Во втором варианте осуществления памяти подседельного штыря 76, как показано на фиг. 46, модуль 79 индикации включает в себя светящуюся полосу 264, т.е. полосу источников света. Светящаяся полоса 264 может, например, включать в себя по меньшей мере одну светодиодную полосу, включающую в себя множество светодиодных ламп. Вычислительное устройство 28 может выдавать команды на подсветку по меньшей мере части светящейся полосы 264, например, секции смежных источников света. Надлежащая подсветка для каждого водителя может сохраняться в запоминающем устройстве 29 вычислительного устройства 28. Альтернативно, штырь 80 может включать в себя запоминающее устройство для записи предпочтительной высоты штыря 80 и идентификации предпочтительной высоты на светящейся полосе 264.
[00261] Водитель может совмещать освещенную часть светящейся полосы 264 с краем подседельной трубы 82, чтобы надлежащим образом размещать штырь 80 и подседельную трубу 82. По меньшей мере, одно из штыря 80 и подседельной трубы 82 может включать в себя механическую блокировку 85, чтобы блокировать штырь 80 относительно подседельной трубы 82, когда штырь 80 находится в идентифицированном расположении вдоль прорези 84. Механическая блокировка 85 может включать в себя рычаг, как показано на фиг. 46, который является поворотным посредством водителя между незастопоренным положением, позволяя перемещать штырь 80 относительно подседельной трубы 82, и застопоренным положением, блокируя штырь 80 относительно подседельной трубы 82. Механическая блокировка 85 может быть, например, блокировкой сжатия, поддерживаемой посредством штыря 80, и она сжимает подседельную трубу 82, чтобы стопорить штырь 80 в подседельной трубе 82.
[00262] Программный код в запоминающем устройстве 29 может включать в себя программный код для выдачи команд на подсветку по меньшей мере одного из источников света, чтобы указать водителю надлежащее положение штыря 80 относительно прорези 84 . Например, запоминающее устройство 29 может включать в себя программный код для того, чтобы подсвечивать по меньшей мере один из источников света, чтобы указать первое положение, когда идентификационный модуль 81 идентифицирует первого пользователя, и подсвечивать по меньшей мере один из источников света, чтобы указать второе положение, когда идентификационный модуль 81 идентифицирует второго пользователя.
[00263] Кнопка 266 может поддерживать связь с вычислительным устройством 28, когда штырь 80 зацепляется с подседельной трубой 82, например, через проводное или беспроводное соединение. Вычислительное устройство 28 может быть запрограммировано, чтобы сохранять предпочтительную высоту в запоминающем устройстве 29, когда кнопка 266 нажимается. Например, вычислительное устройство 28 может принимать сигнал от кнопки 266, когда кнопка 266 нажимается и, в ответ, запоминающее устройство 29 может сохранять положение по высоте штыря 80 относительно подседельной трубы 82. Вычислительное устройство 28 может также сопоставлять положение по высоте относительно идентификатора 83, обнаруженного посредством идентификационного модуля 81. Положение по высоте штыря 80 относительно подседельной трубы 82 может измеряться посредством любого подходящего устройства, например, датчика на эффекте Холла, механического измерительного устройства и т.д., подключенного к вычислительному устройству 28. Вычислительное устройство 28 может сопоставлять положение по высоте подсветки светящейся полосы 264 таким образом, что светящаяся полоса 264 может идентифицировать сохраненное положение по высоте.
[00264] Светящаяся полоса 264 может быть красной и может функционировать в качестве обращенного назад стоп-сигнала или хвостового фонаря, когда штырь 80 зацепляется с подседельной трубой 82. В этой конфигурации, вычислительное устройство 28 может подсвечивать светящуюся полосу 264 аналогичным образом как изложено выше относительно стоп-сигнала 143. В этой конфигурации, светящаяся полоса 264 может работать одновременно со стоп-сигналом 143.
[00265] Со ссылкой на фиг. 47 и 48, в третьем варианте осуществления памяти подседельного штыря 76, модуль 79 индикации может включать в себя механическую блокировку, зацепляющую штырь 80 с подседельной трубой 82. В частности, одно из штыря 80 и подседельной трубы 82 задает отверстия 270, например, пазы 270, и другое из штыря 80 и подседельной трубы 82 поддерживает стопор 268, например, шаровую опору, конфигурированный, чтобы зацеплять отверстия 270. В частности, как показано на фиг. 47, штырь 80 может включать в себя стопор 268, посаженный в одном из отверстий 270, соответственно.
[00266] Модуль 79 индикации по фиг. 47 и 48 включает в себя исполнительный механизм 272, расположенный рядом со стопорами 268 для выдвигания/втягивания стопора 268 относительно отверстий 270. Исполнительный механизм 272 может быть, например, электромагнитом, и, в этой конфигурации, стопор 268 может смещаться к выдвинутом положении посредством пружины 276. Электромагнит может работать против смещения пружины 276, чтобы втягивать стопор 268. Подседельная труба 282 задает отверстие 274 для приема одного из стопора 268 для стопорения штыря 80 относительно подседельной трубы 282. В частности, когда стопор 268, соответствующий требуемой высоте, совмещается с отверстием 274, то стопор 268 может зацепляться с отверстием 274. Исполнительный механизм 272 может поддерживать связь с вычислительным устройством 28, и вычислительное устройство 28 может выдавать команду в исполнительный механизм 272, чтобы выдвигать/втягивать стопор 268. С дальнейшей ссылкой в фиг. 47 и 48, программный код в запоминающем устройстве 29 может включать в себя программный код для выдачи команды на приведение в действие механической блокировки, например, исполнительного механизма 272, в первом положении для первого водителя, когда идентификационный модуль 81 идентифицирует первого водителя, и приводить в действие механическую блокировку, например, исполнительный механизм 272, во втором положении, когда идентификационный модуль 81 идентифицирует второго водителя. Например, запоминающее устройство 29 может включать в себя программный код для выдачи команды, побуждающей исполнительный механизм 272 зацеплять стопор 268 с надлежащим отверстием 270. Положение по высоте штыря 80 относительно подседельной трубы 82 может измеряться посредством любого подходящего устройства, например, датчика на эффекте Холла, механического измерительного устройства и т.д., подключенного к вычислительному устройству 28. Вычислительное устройство 28 может сопоставлять положение по высоте приведению в действие исполнительного механизма 272 так, что исполнительный механизм 272 может идентифицировать сохраненное положение по высоте.
[00267] Каждое вычислительное устройство, такое как описанные в данном документе, как правило, включает в себя команды, исполняемые одним или более вычислительными устройствами, такими как идентифицированные выше, и чтобы выполнять блоки или этапы процессов, описанных выше. Например, этапы процессов, обсужденные выше, могут быть осуществлены как машиноисполняемые команды.
[00268] Машиноисполняемые команды могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с помощью множества языков и/или технологий программирования, включающих в себя, без ограничения, и либо отдельно, либо в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем случае, процессор (например, микропроцессор) принимает команды, например, из памяти, компьютерно-читаемого носителя и т.д. и выполняет эти команды, таким образом, выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие команды и другие данные могут быть сохранены и передаваться с помощью множества компьютерно-читаемых носителей. Файл в вычислительном устройстве, в общем, является набором данных, сохраненных на машиночитаемом носителе, к примеру, на носителе хранения данных, в оперативном запоминающем устройстве и т.д.
[00269] Машиночитаемый носитель включает в себя любой носитель, который участвует в представлении данных (например, команд), который может быть считан посредством компьютера. Такой носитель может принимать много форм, включающих в себя, но не только, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители включают в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основное запоминающее устройство. Общие формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель со структурами отверстий, RAM, PROM, EPROM, перепрограммируемое EEPROM, любую другую микросхему или картридж запоминающего устройства, несущую или любой другой носитель, с которого компьютер может выполнять считывание.
[00270] Изобретение было описано в качестве иллюстрации, и следует понимать, что терминология, которая была использована, предполагает скорее описательный, а не ограничительный характер слов. Многие модификации и вариации настоящего изобретения возможны в свете раскрытых выше сведений, и изобретение может быть осуществлено иначе, чем было конкретно описано.
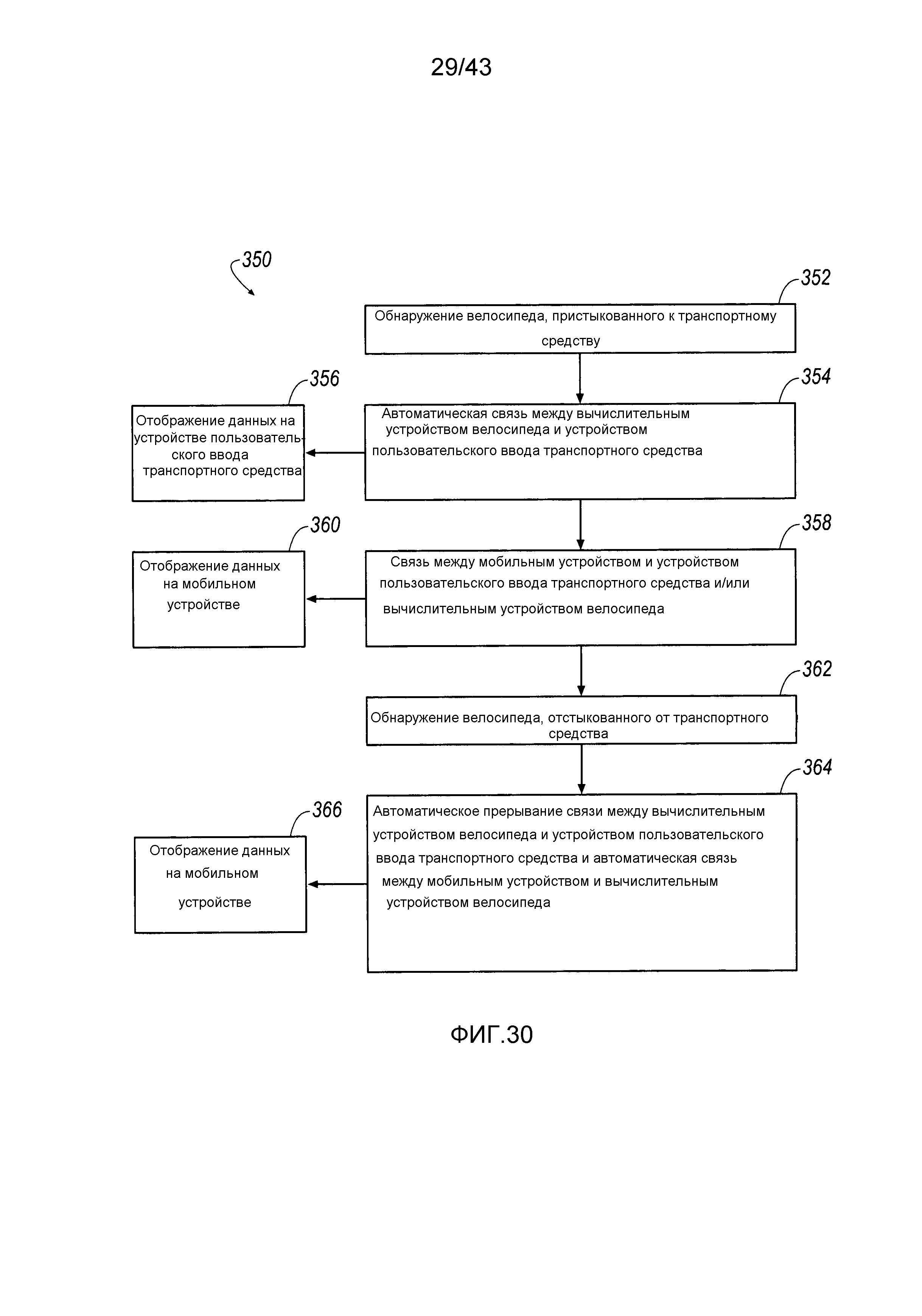
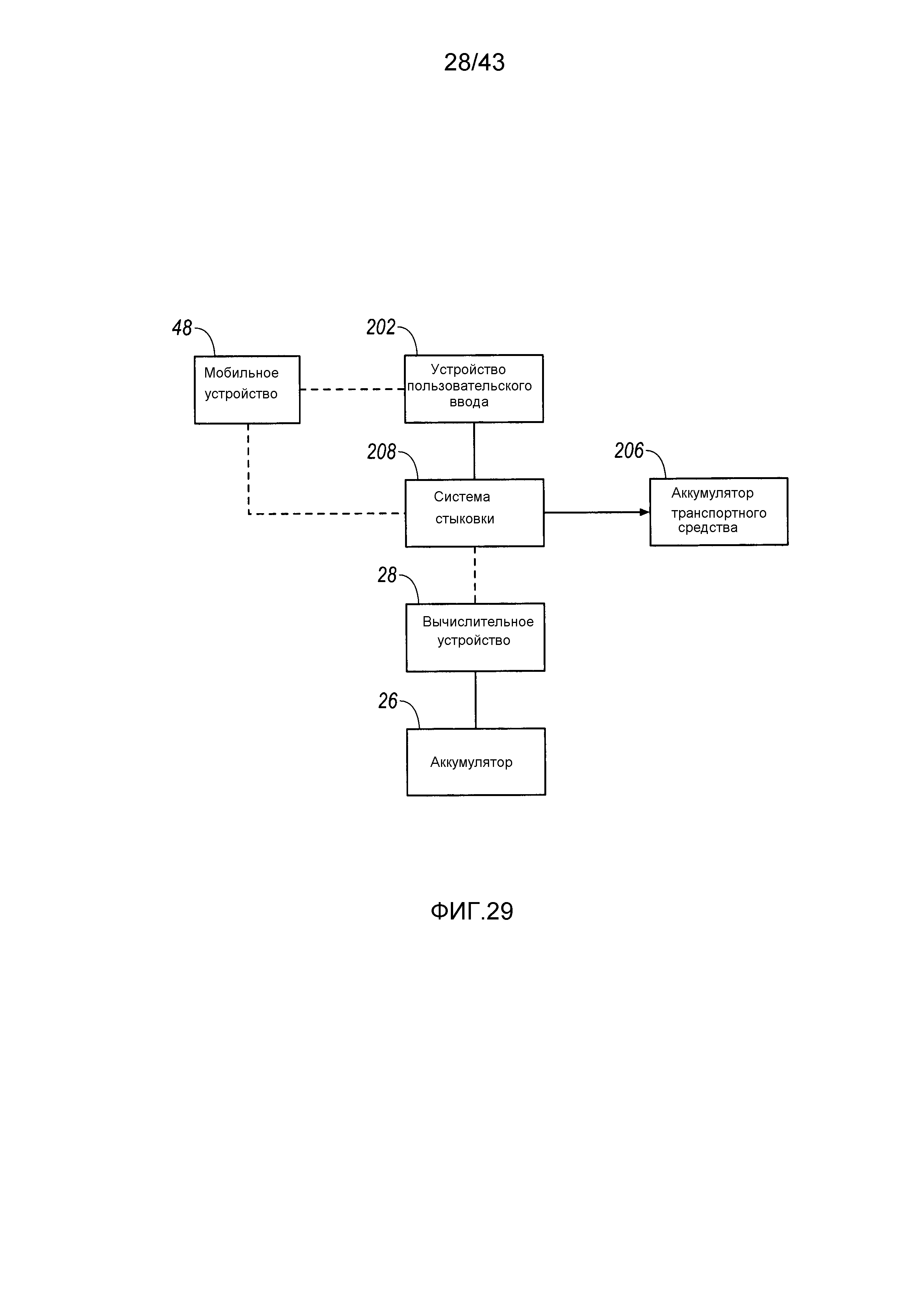
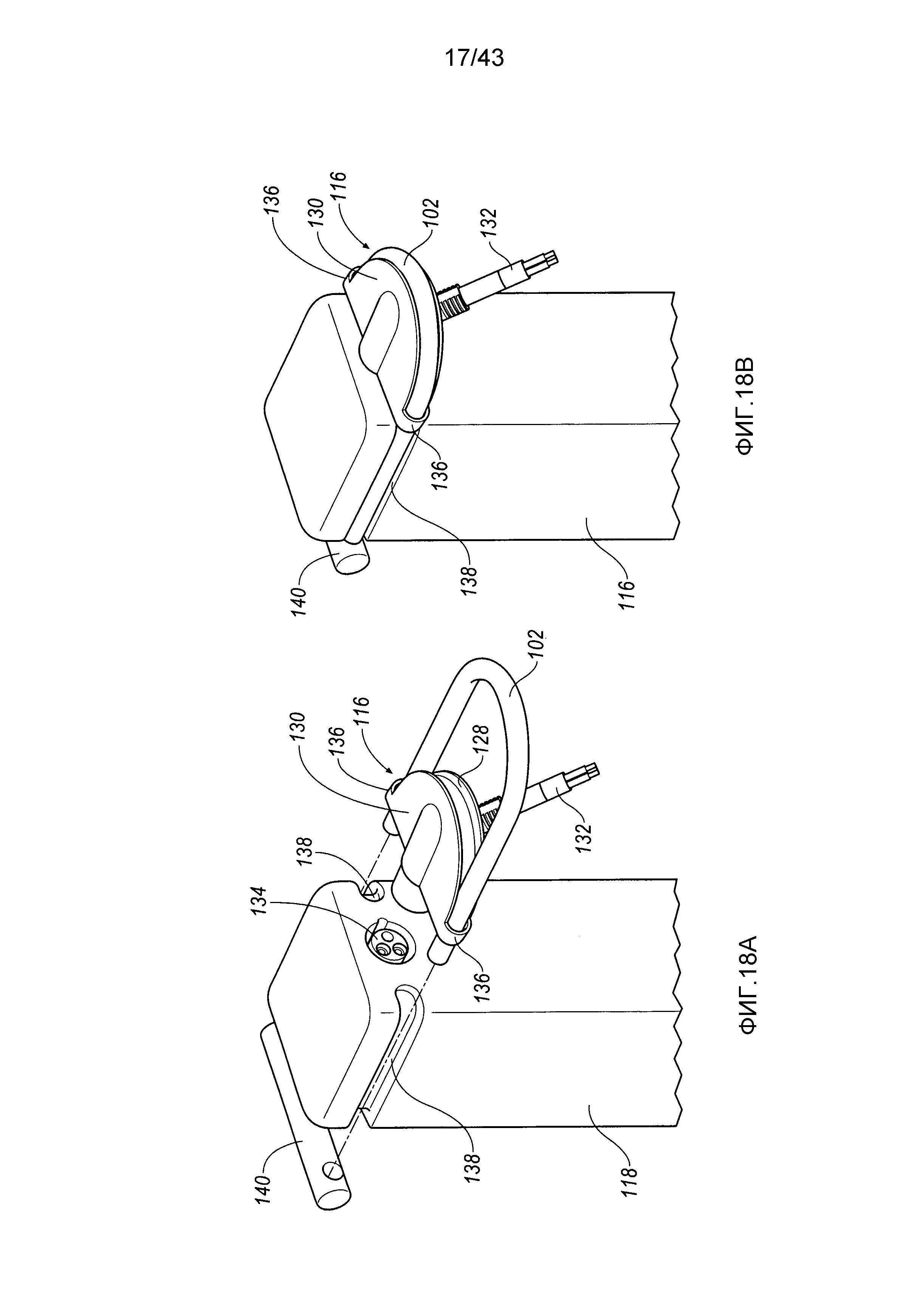
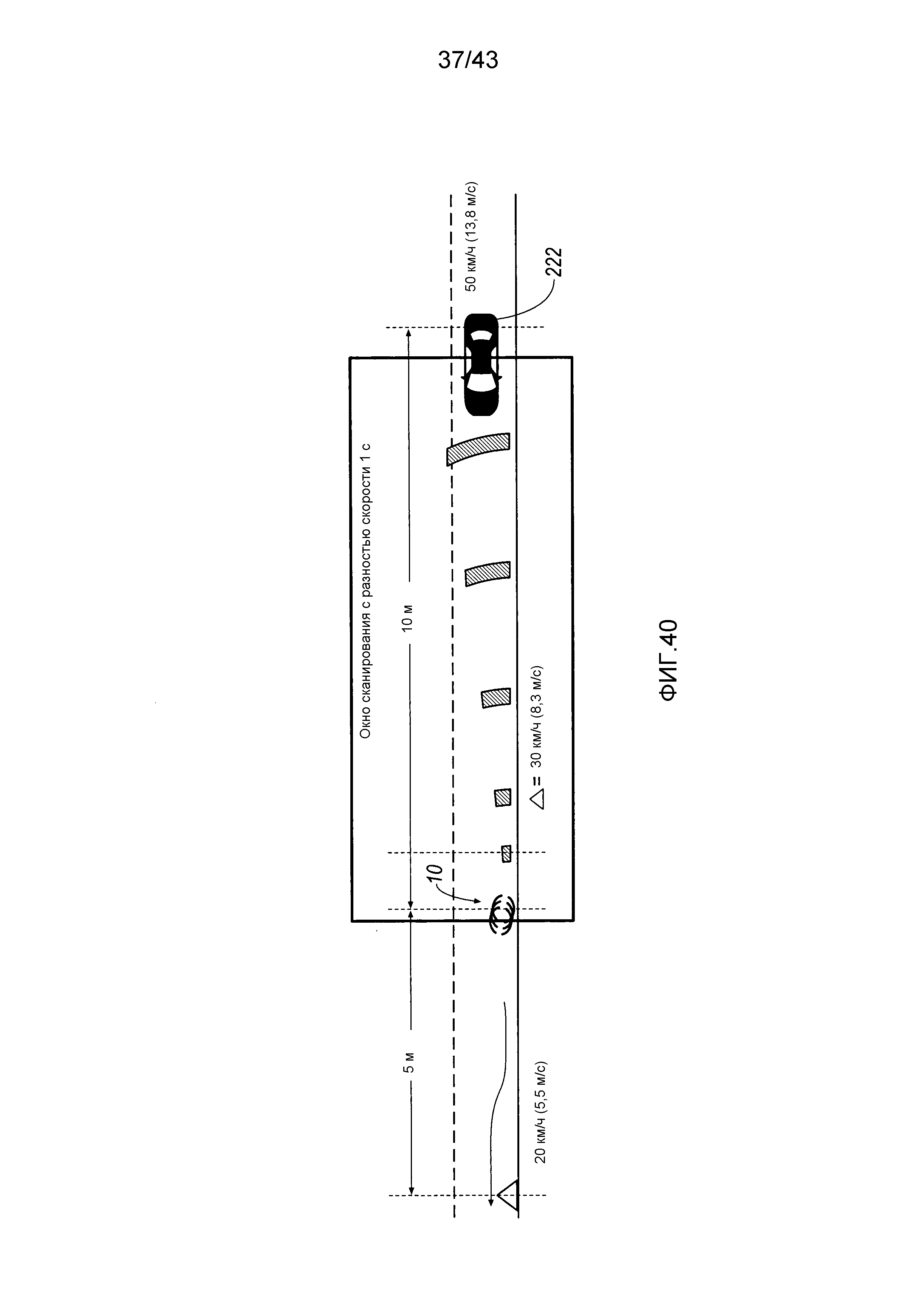
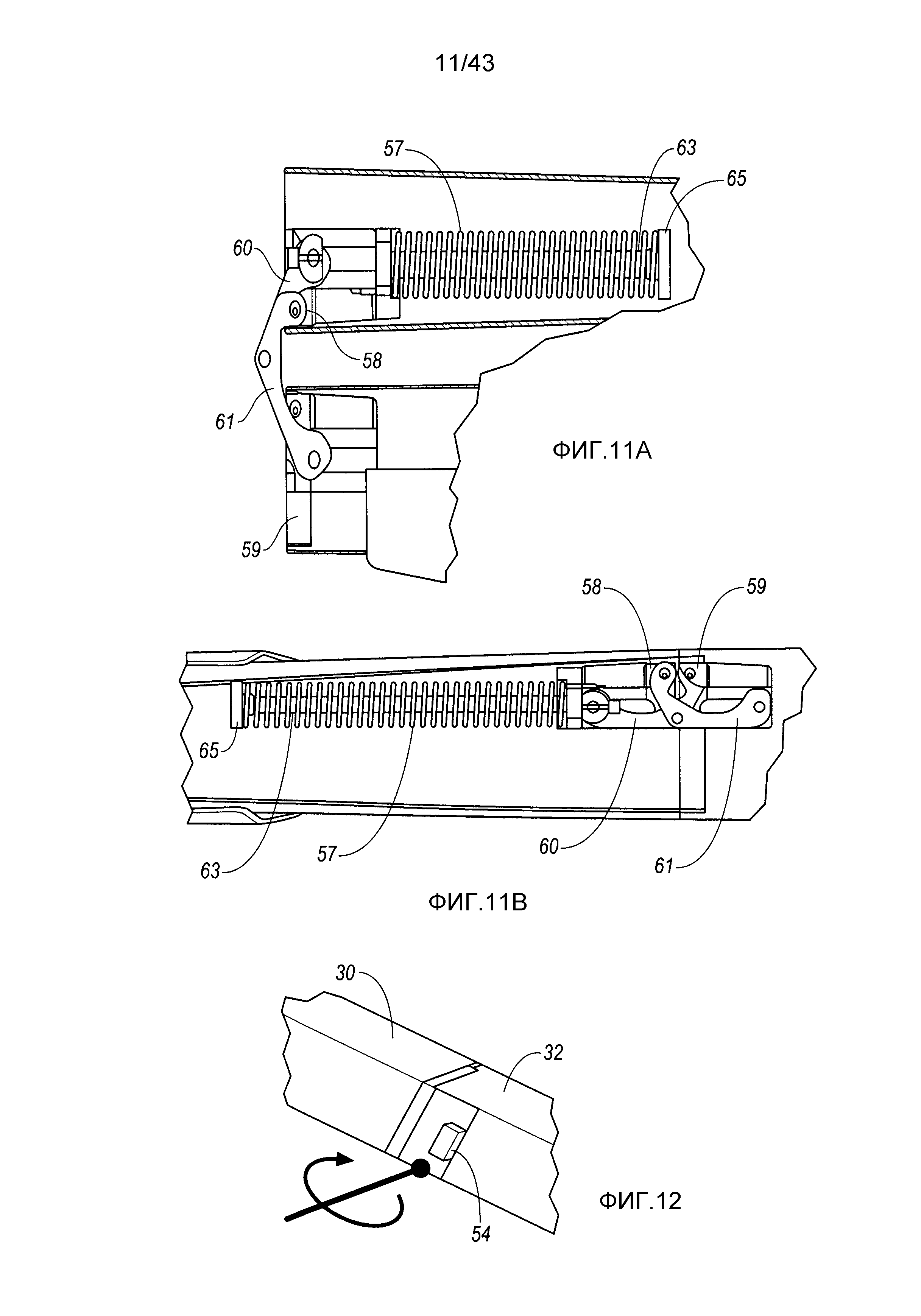
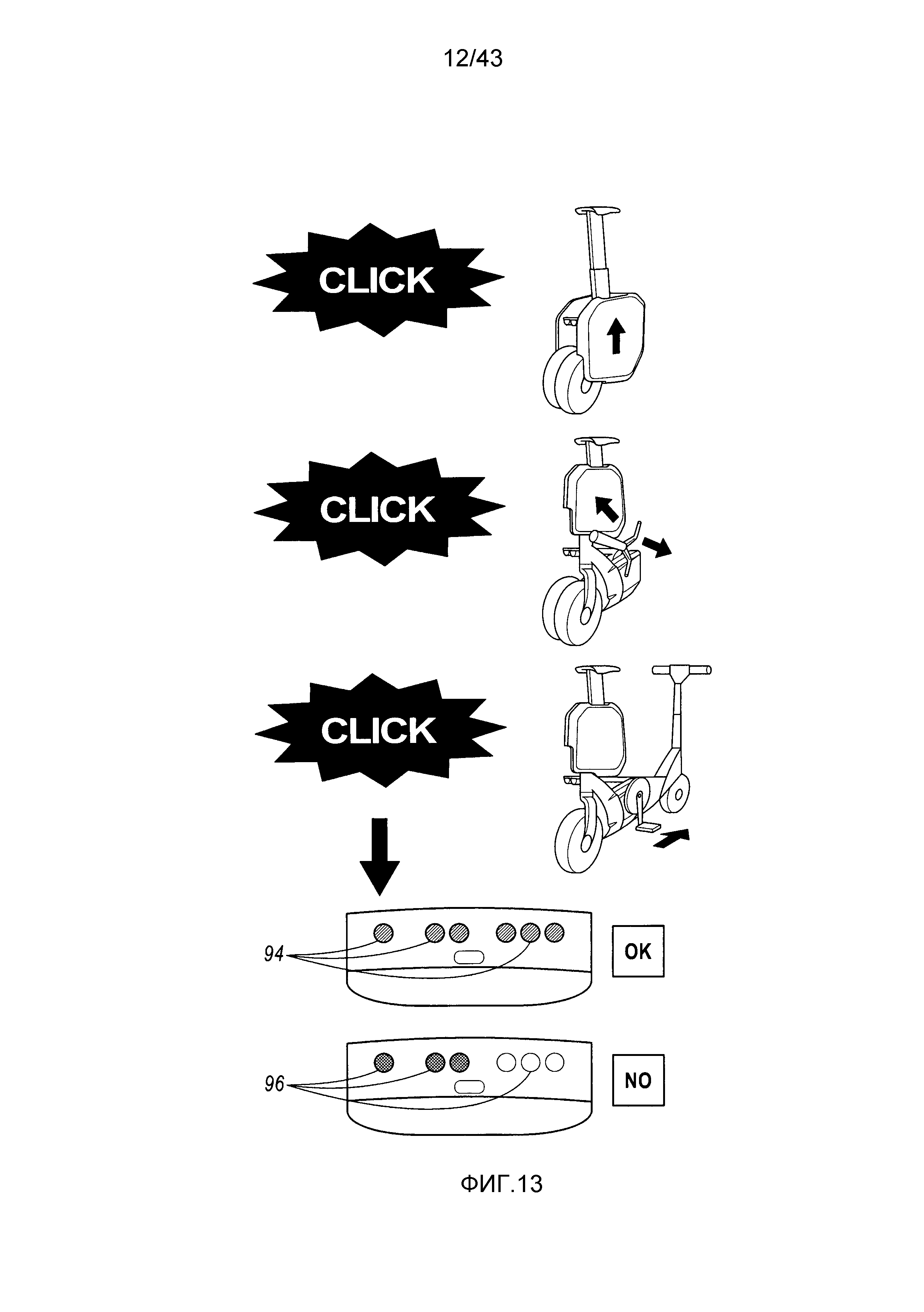
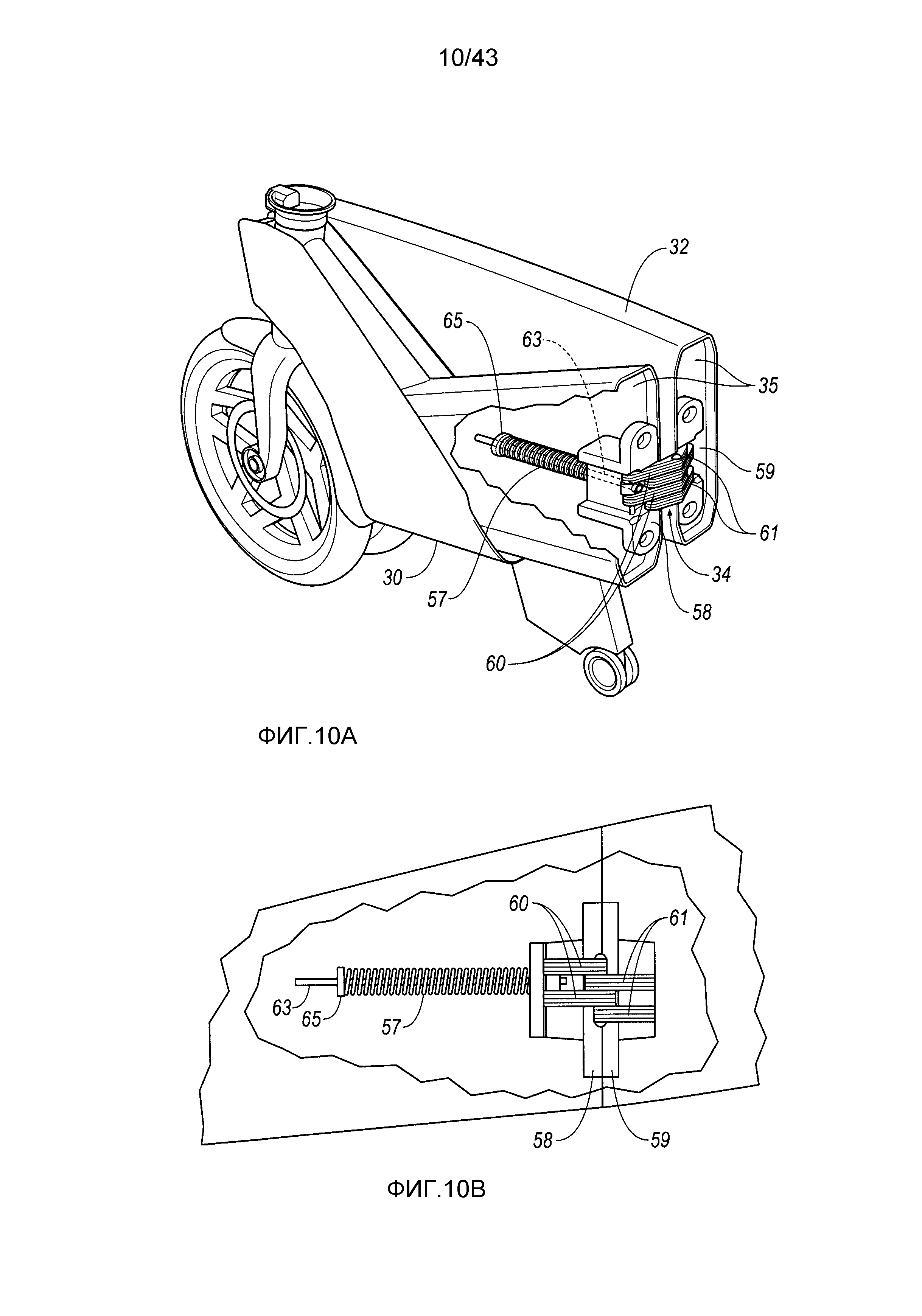
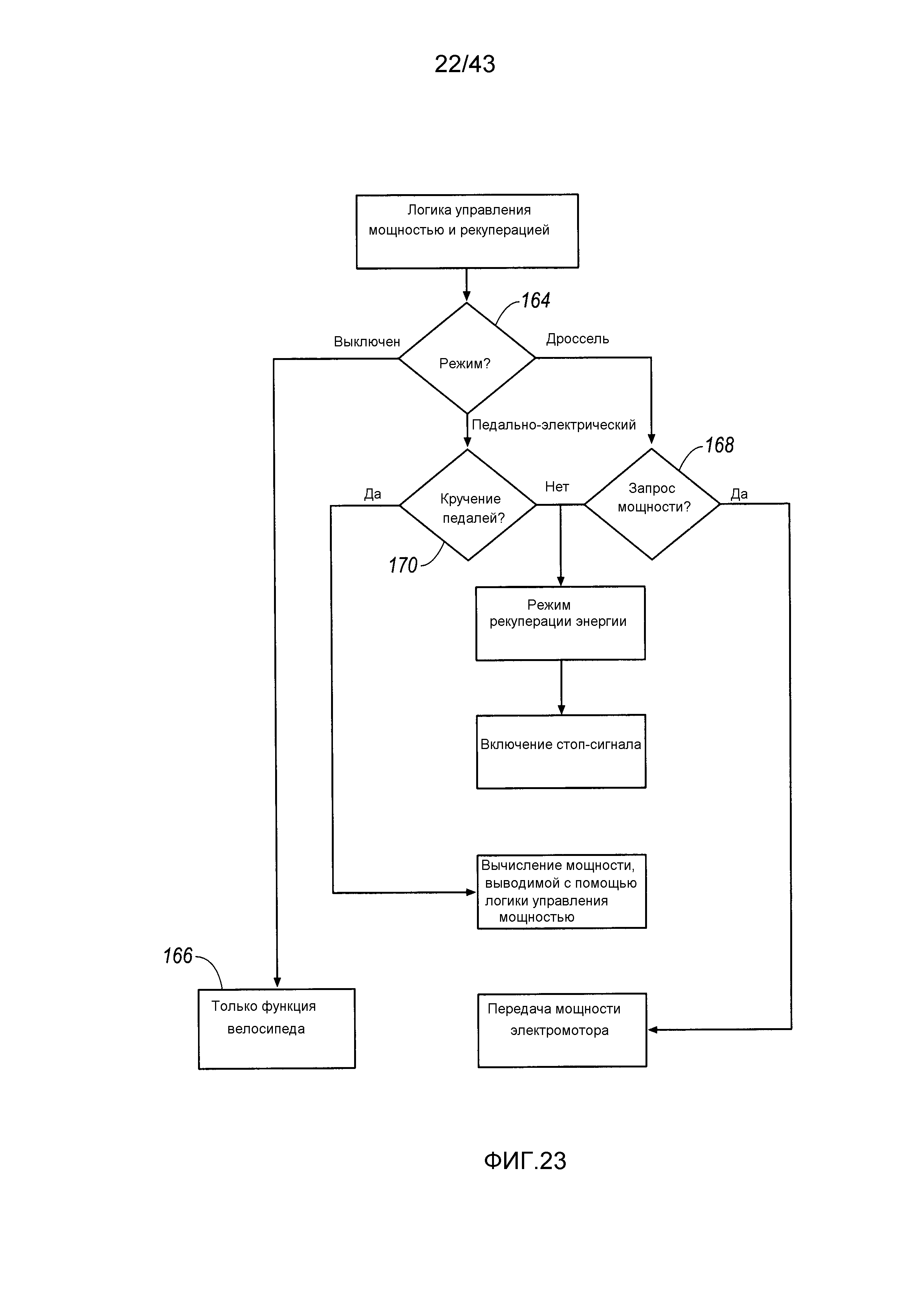
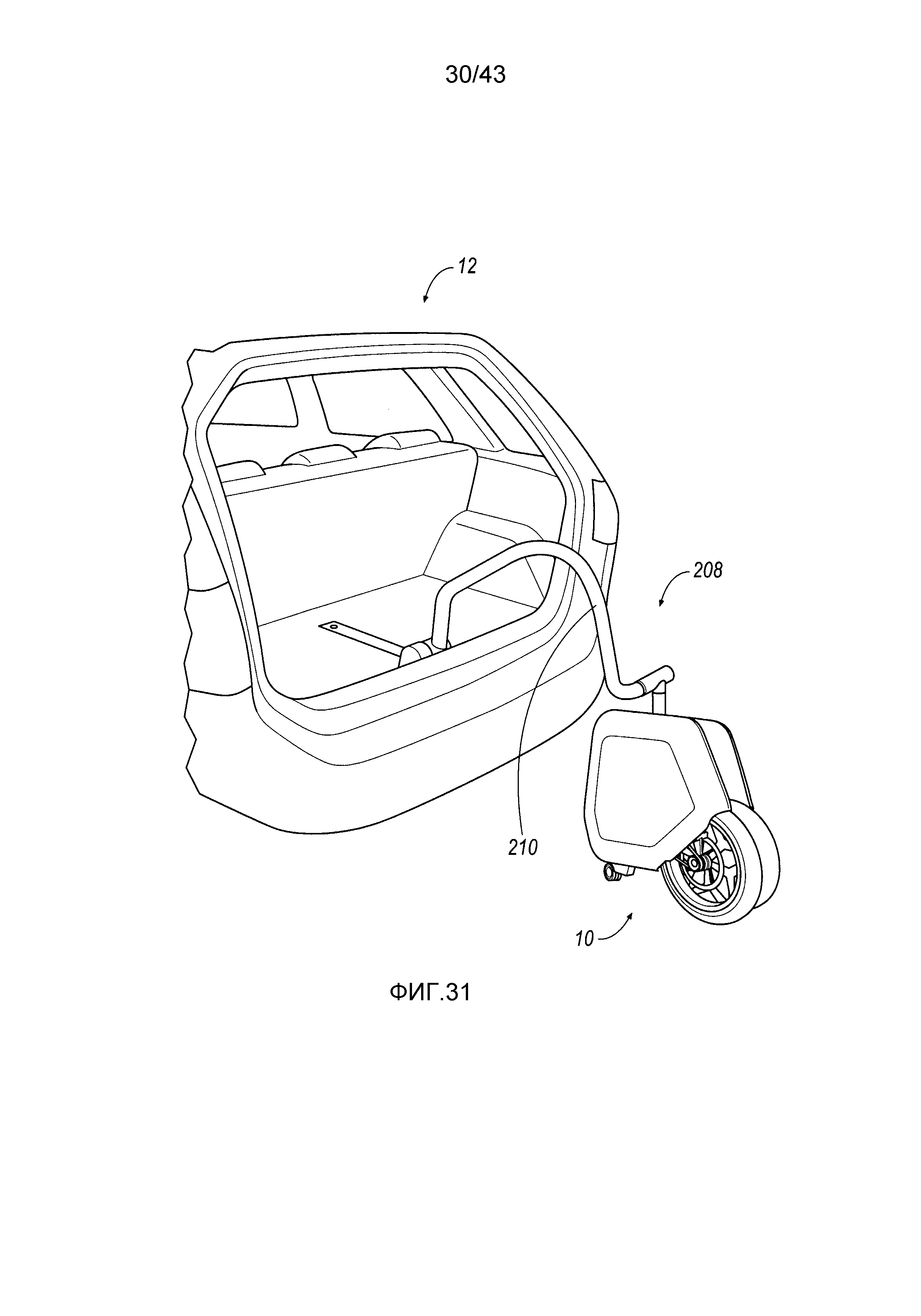
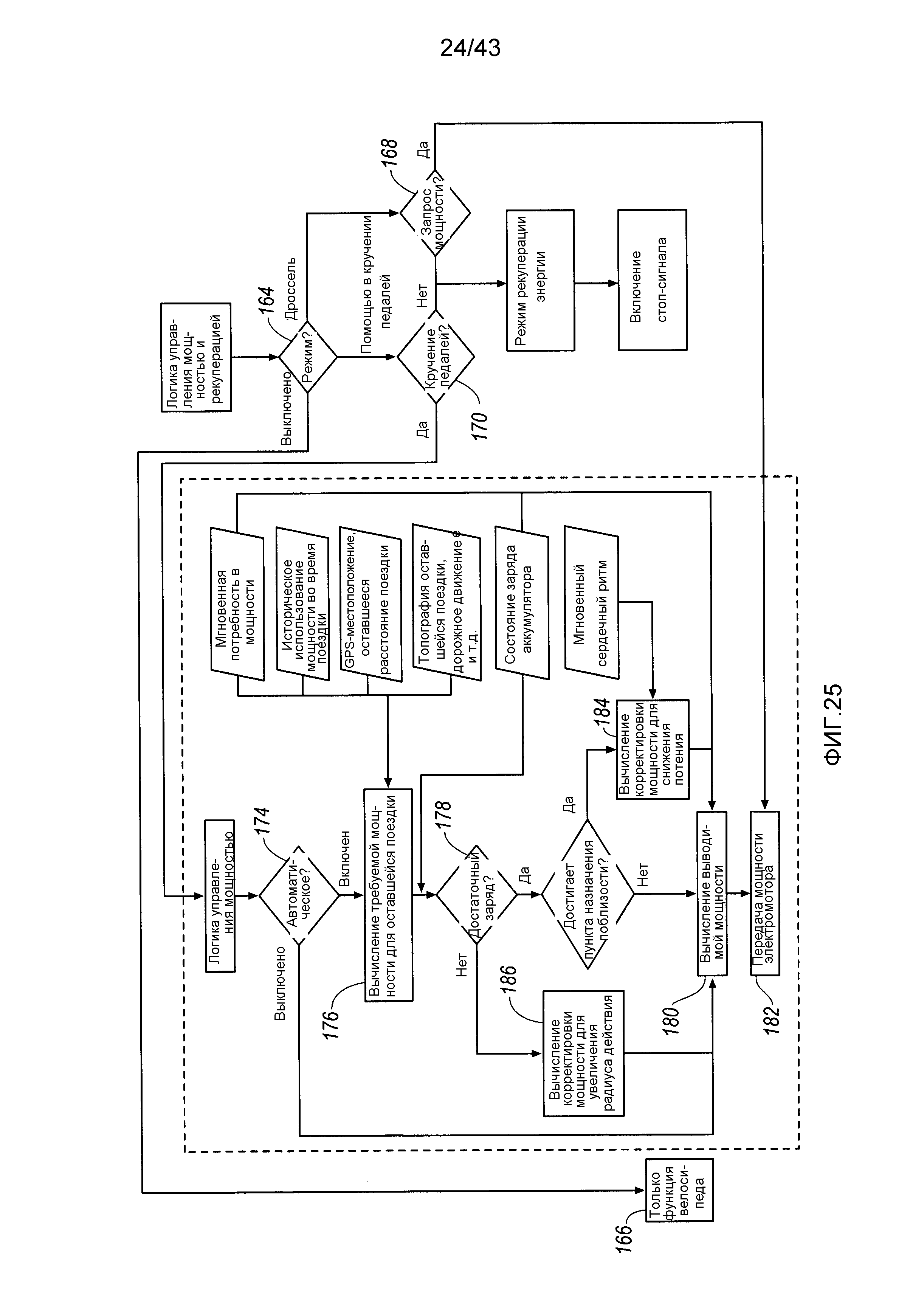
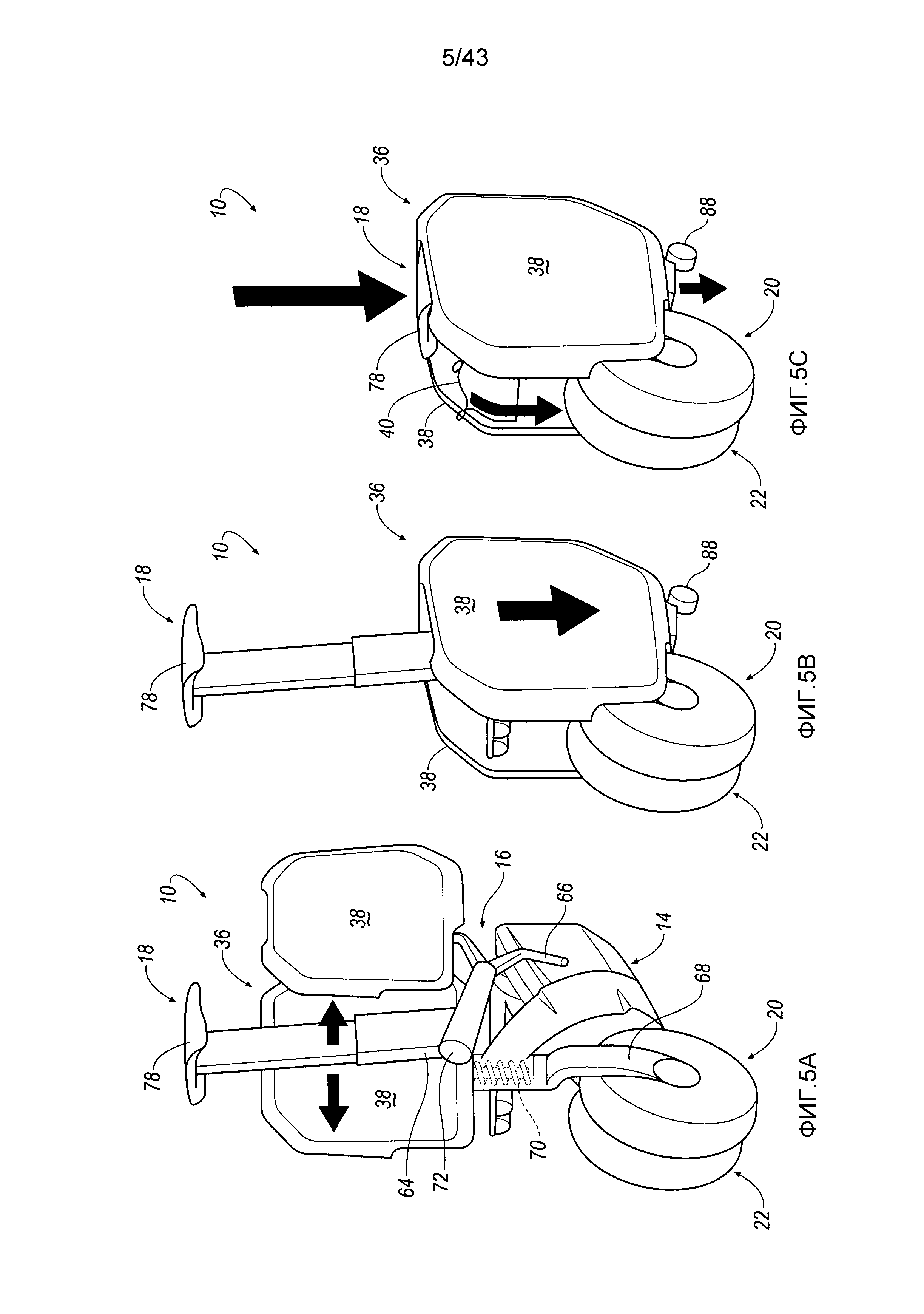
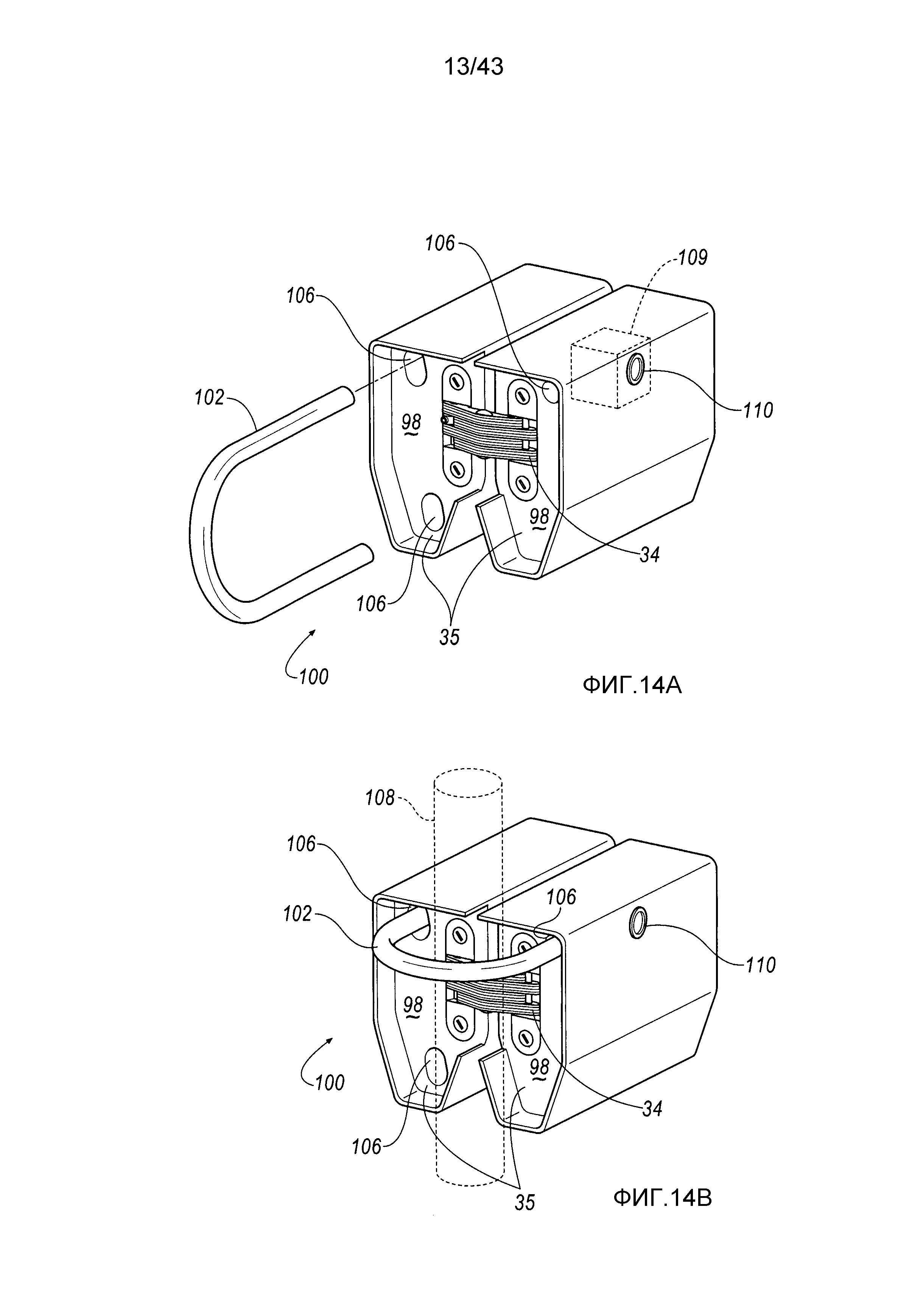
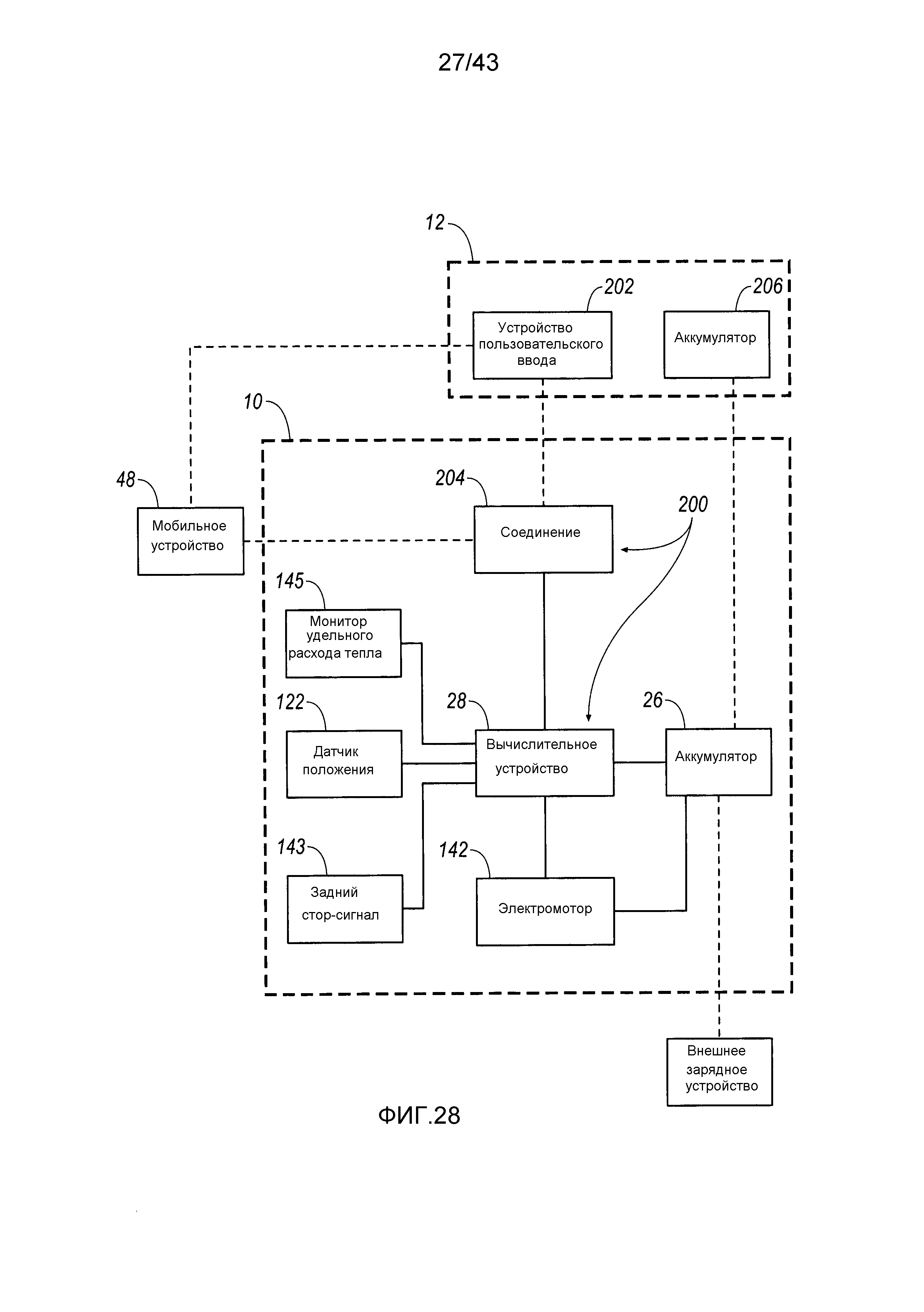
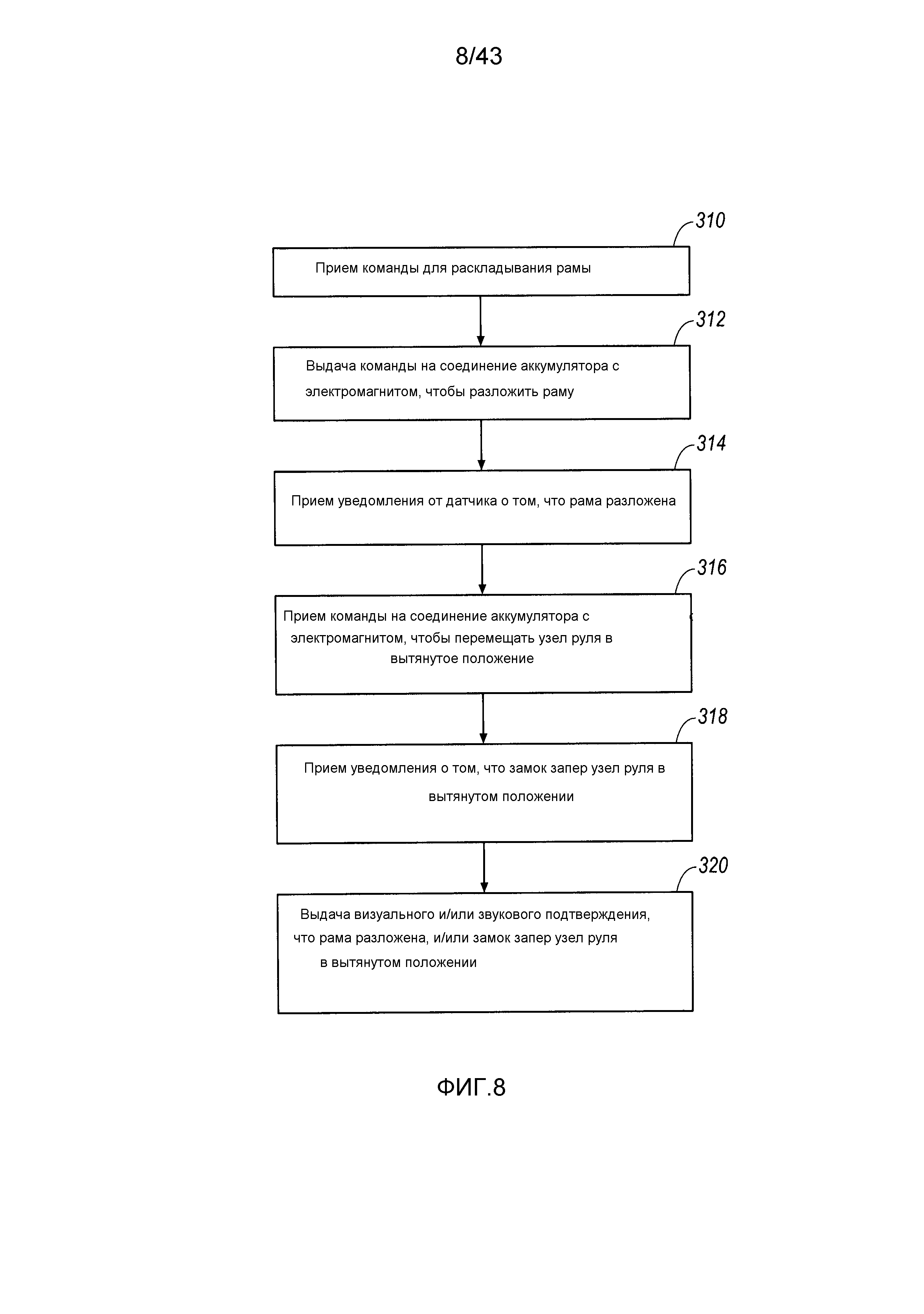
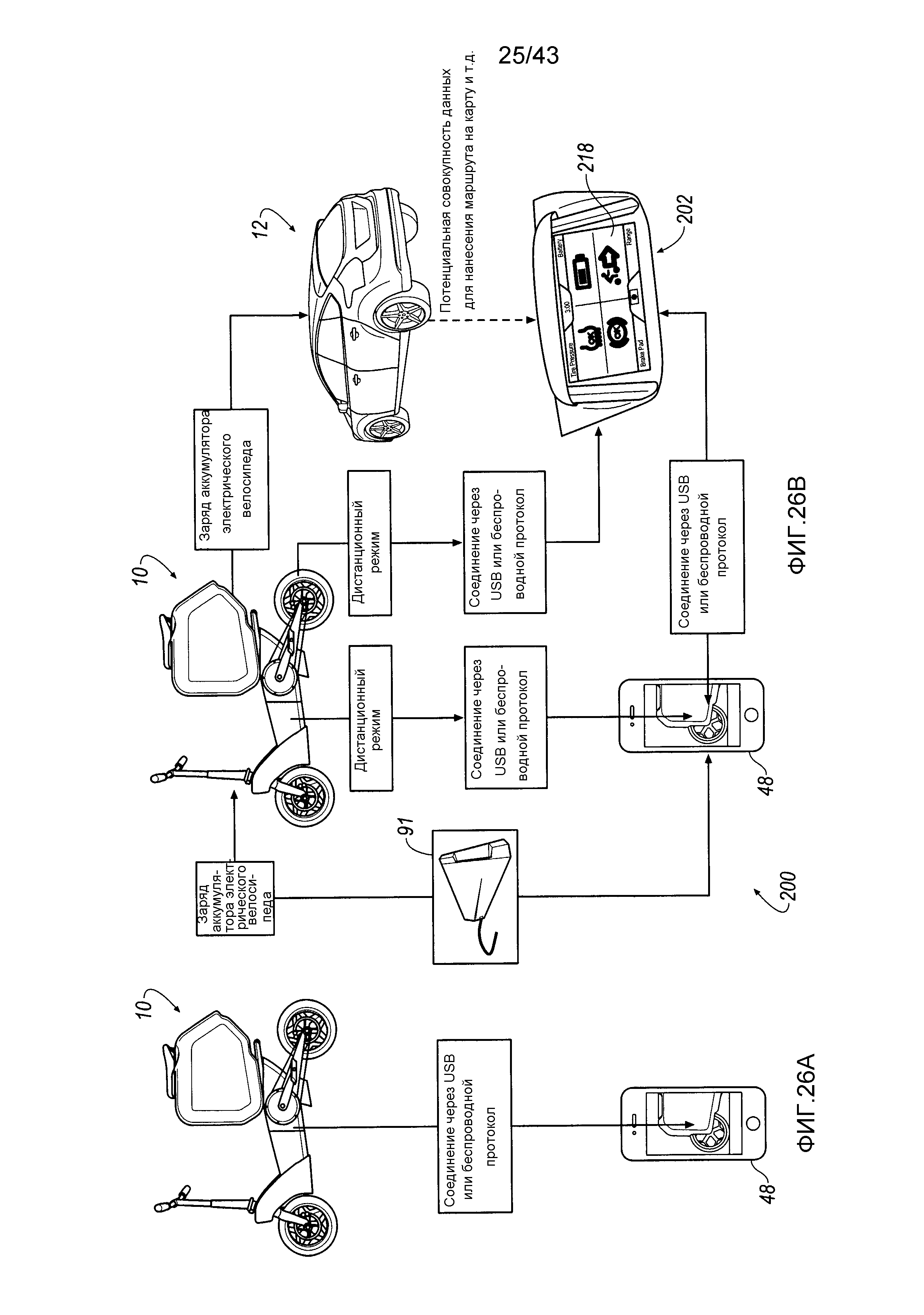
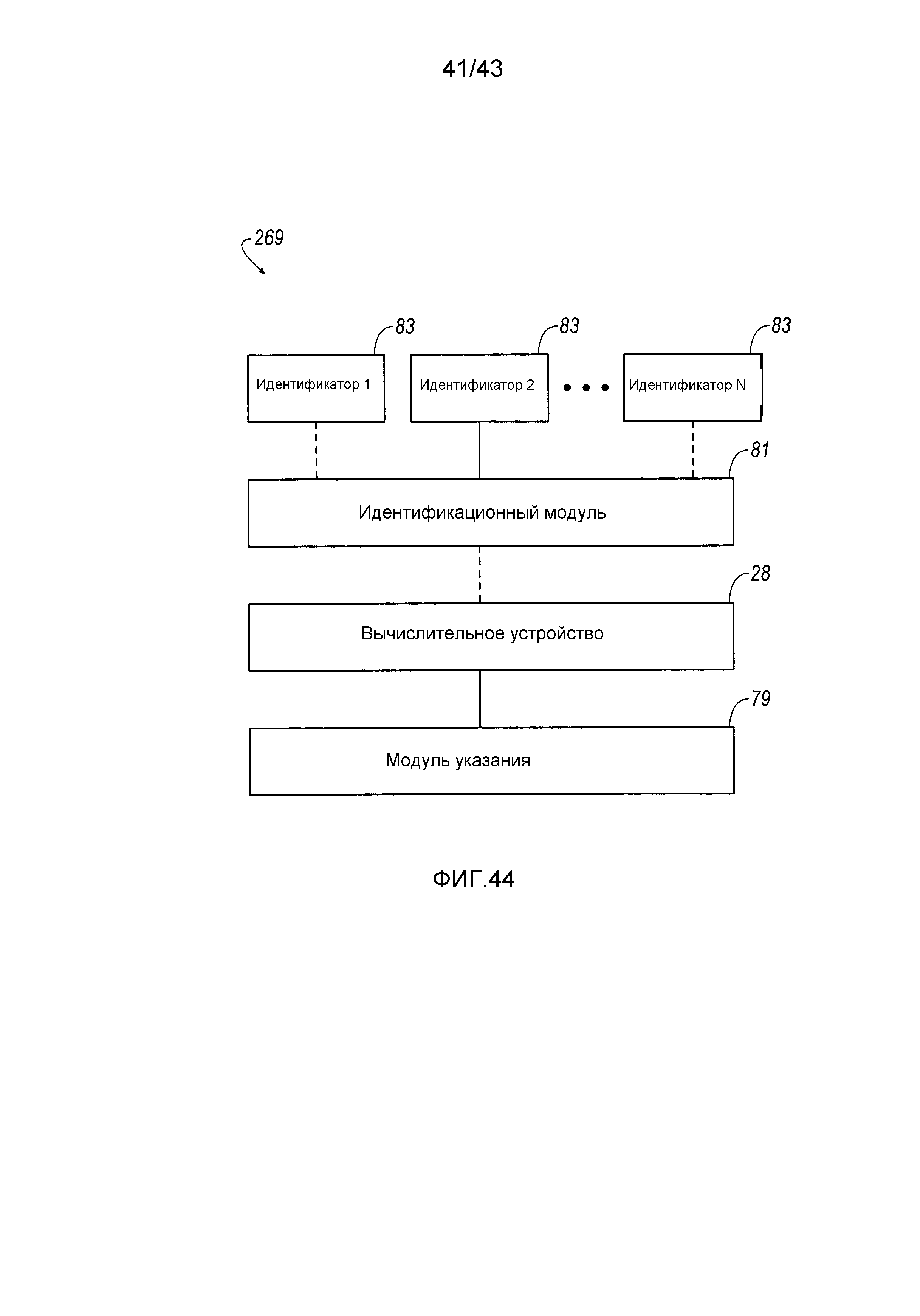
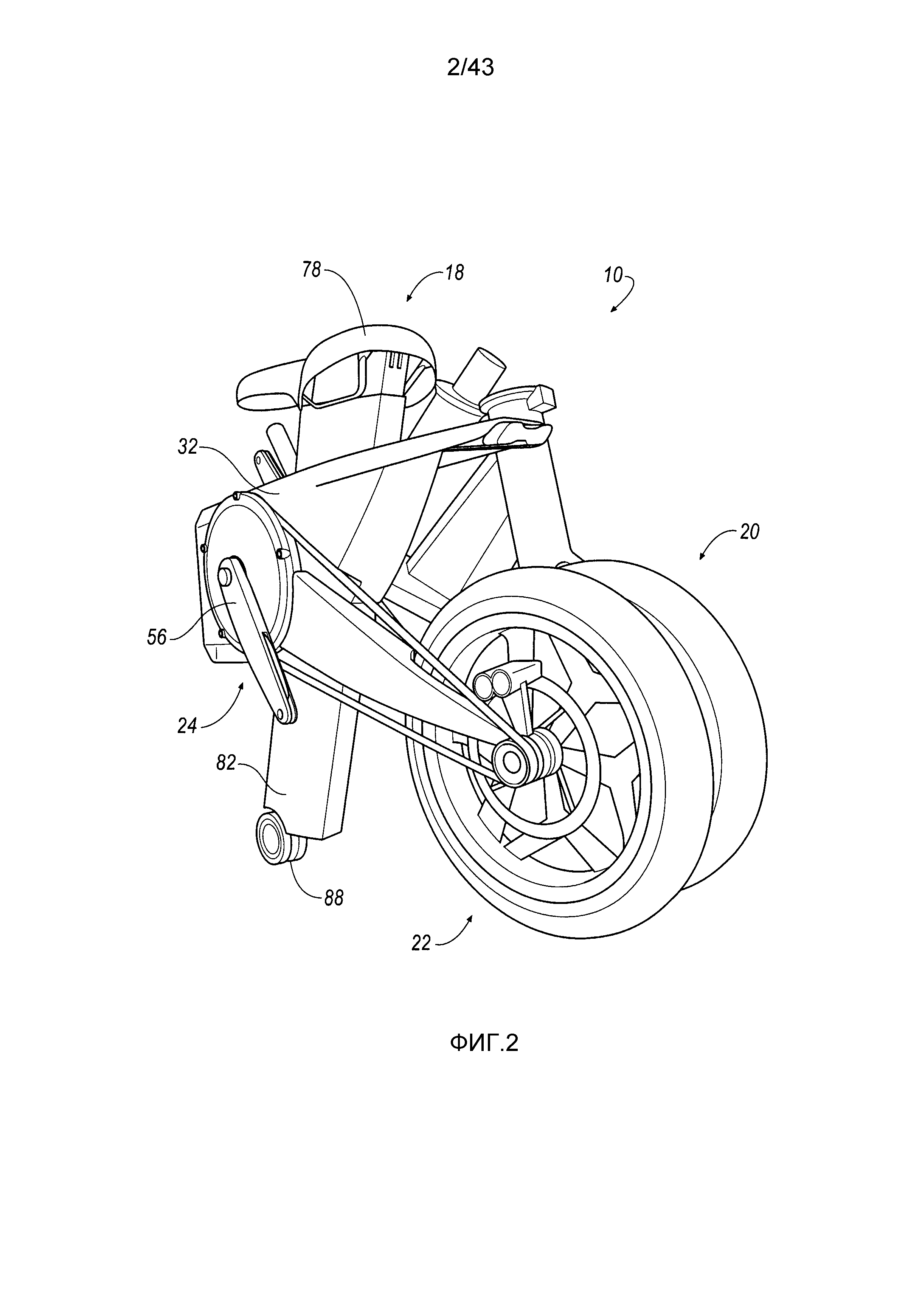
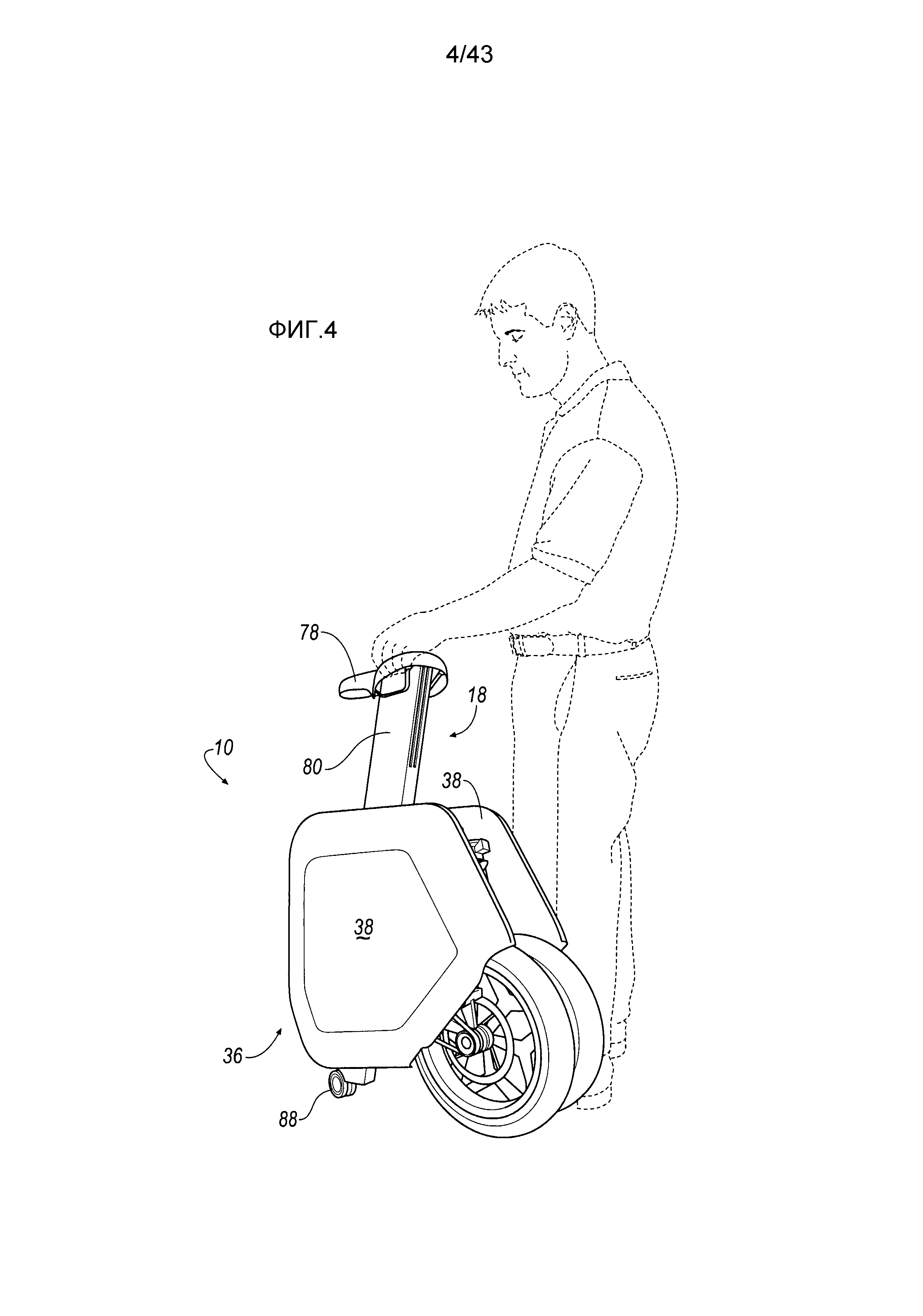
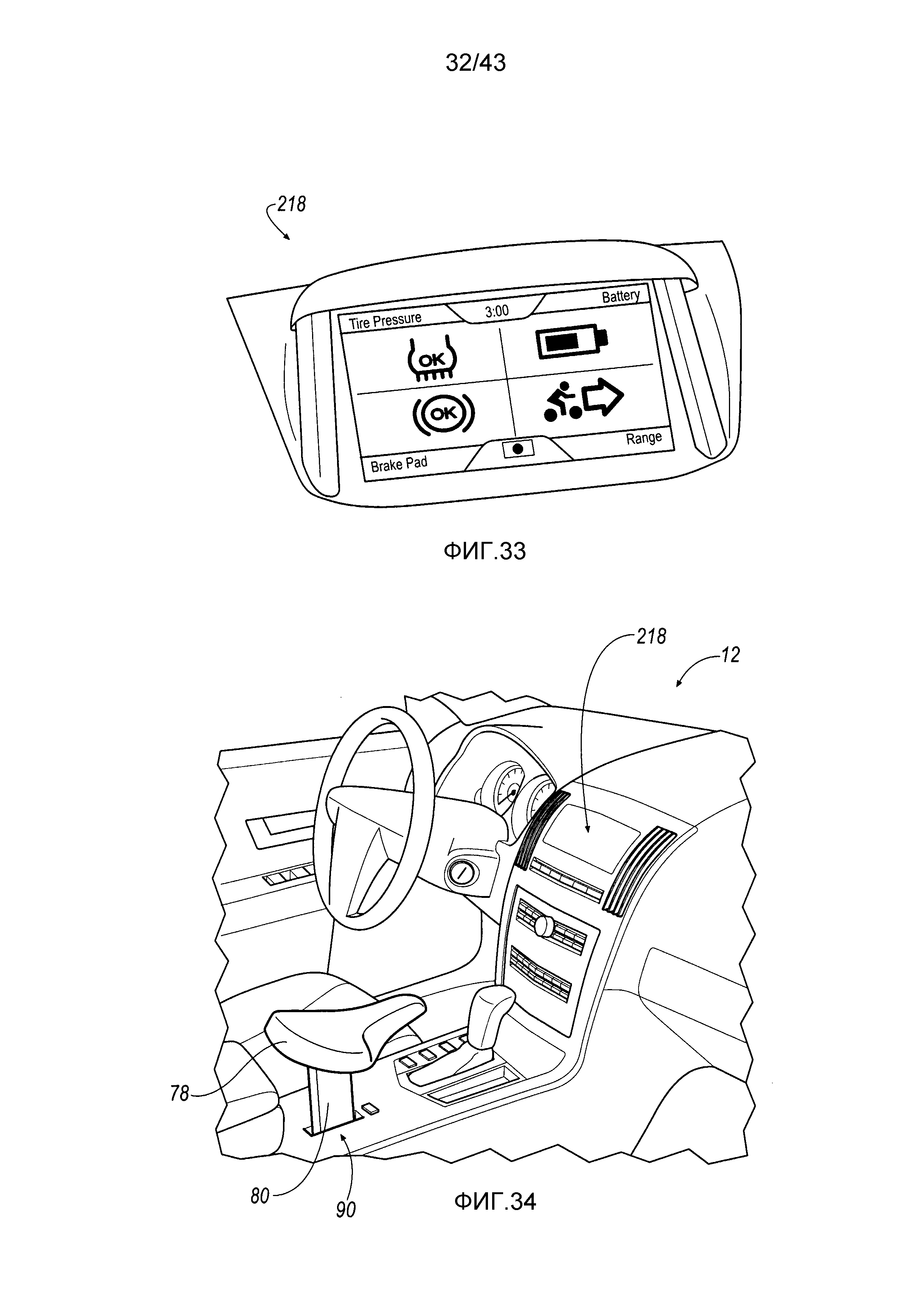
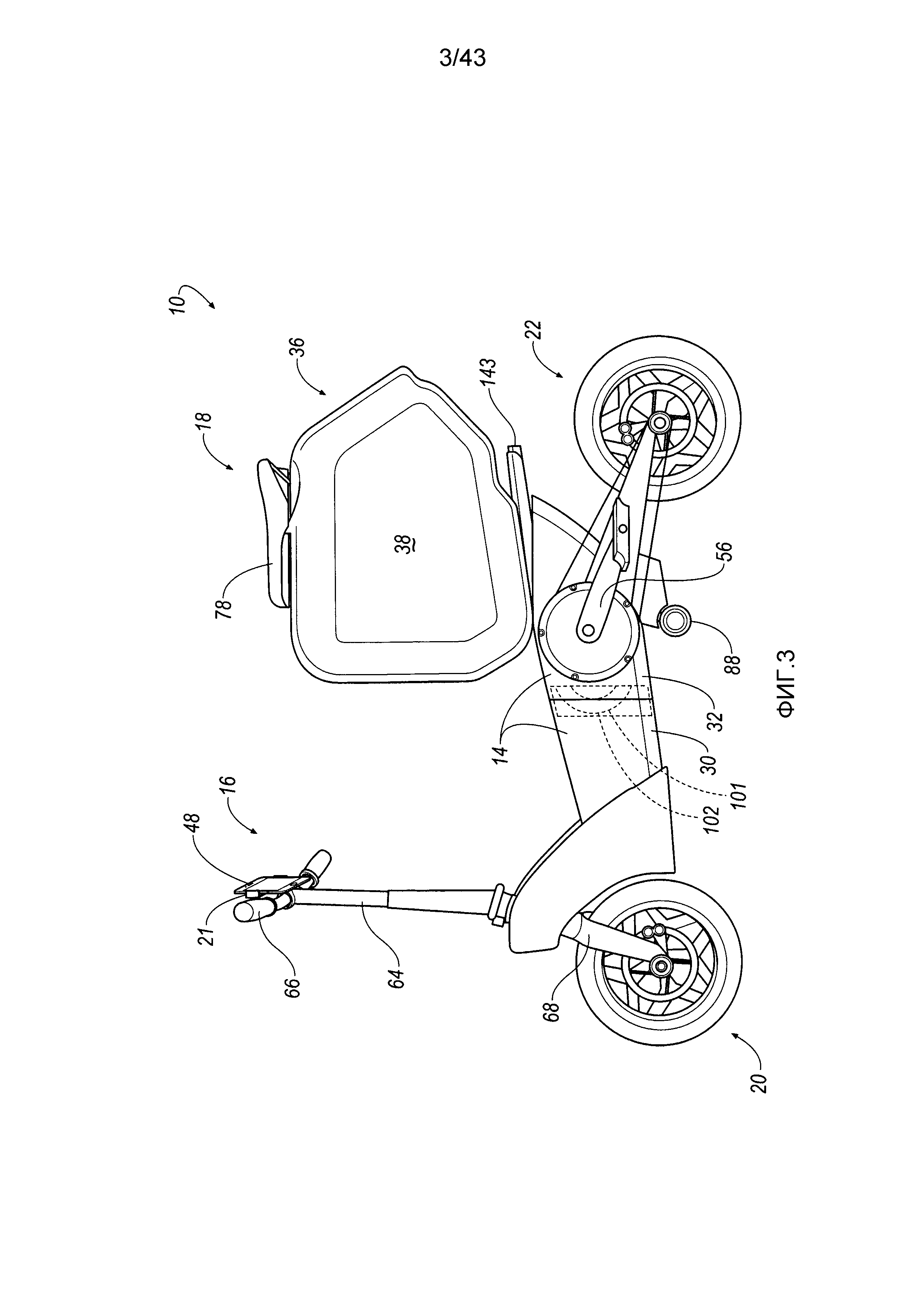
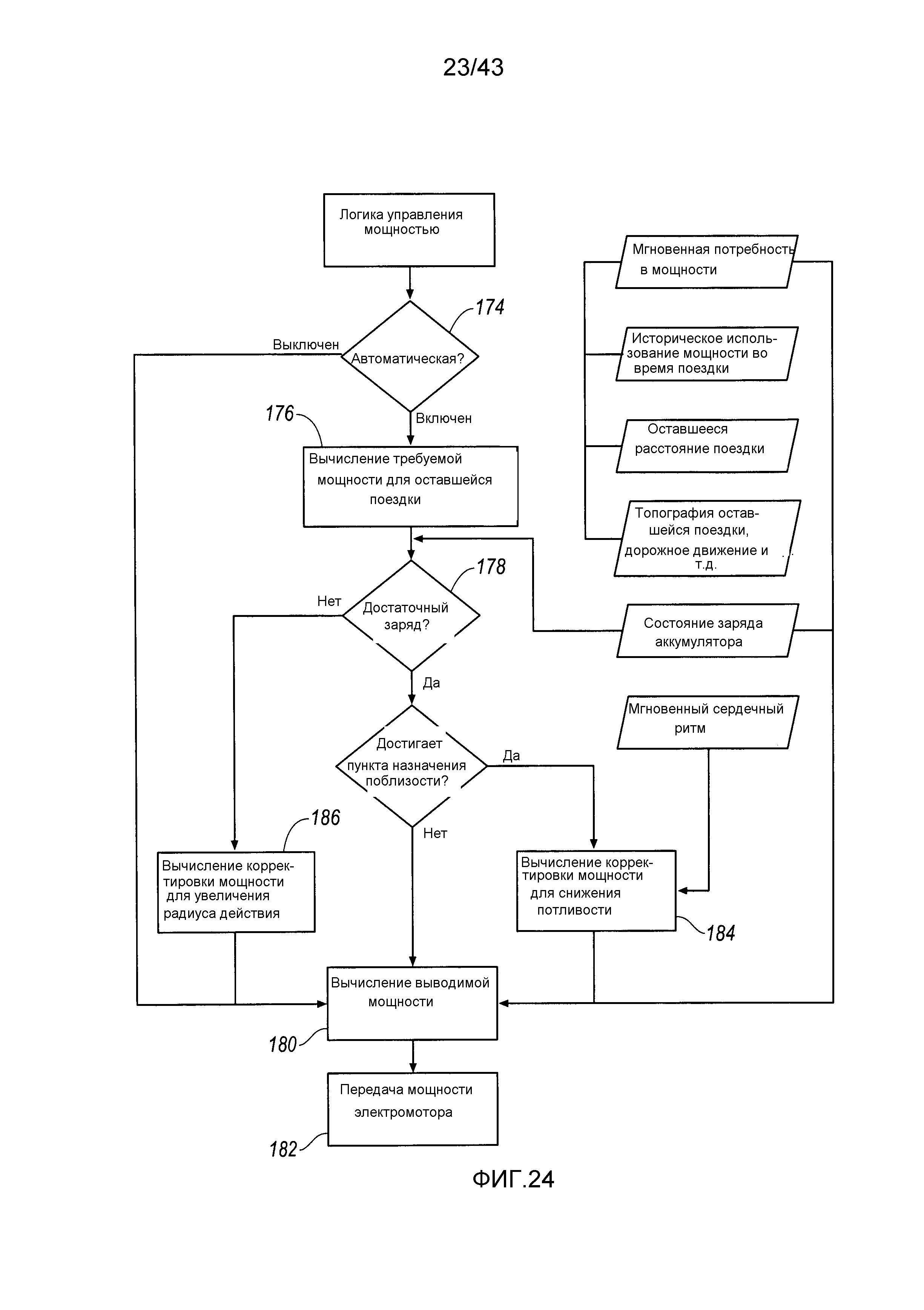
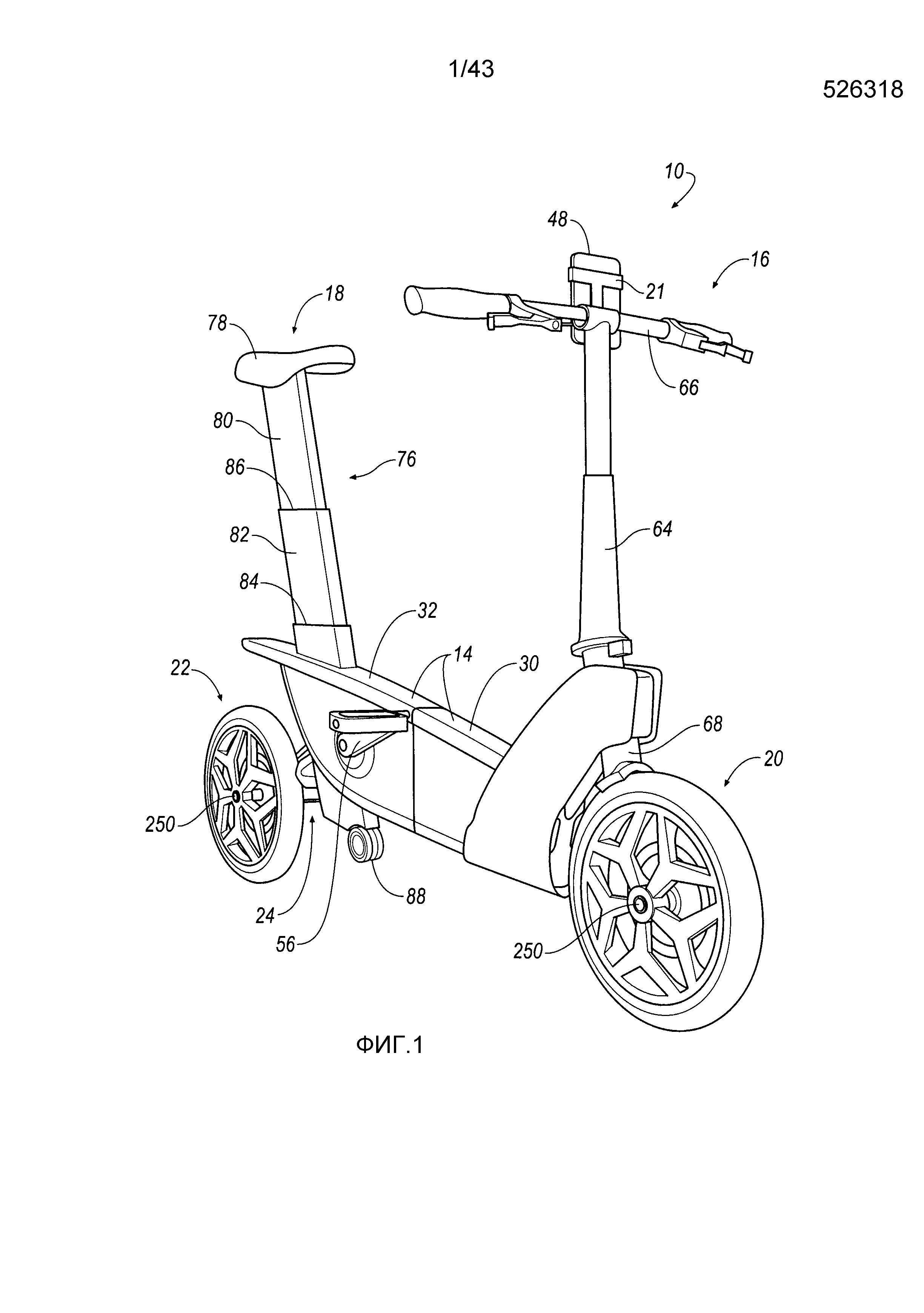
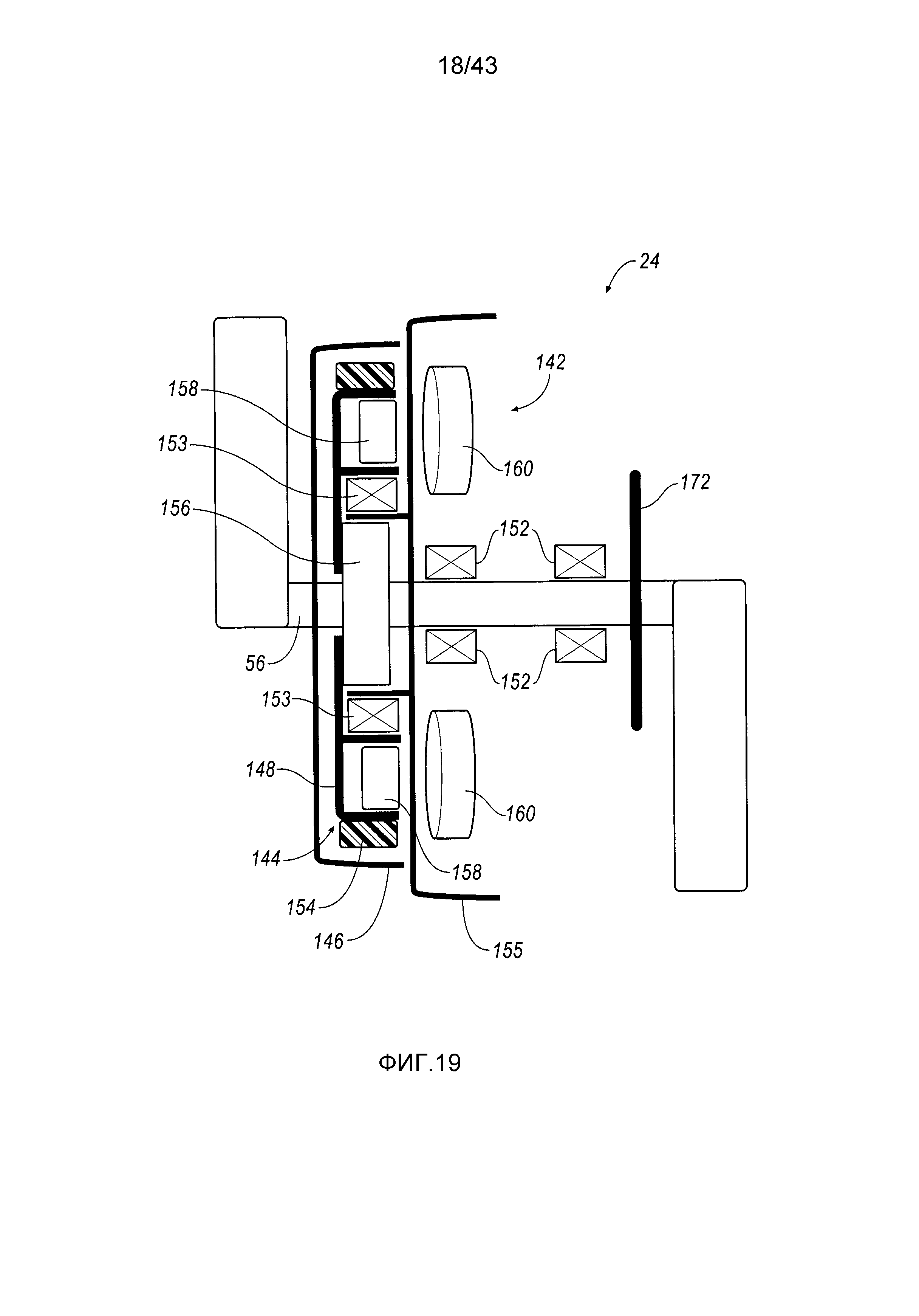
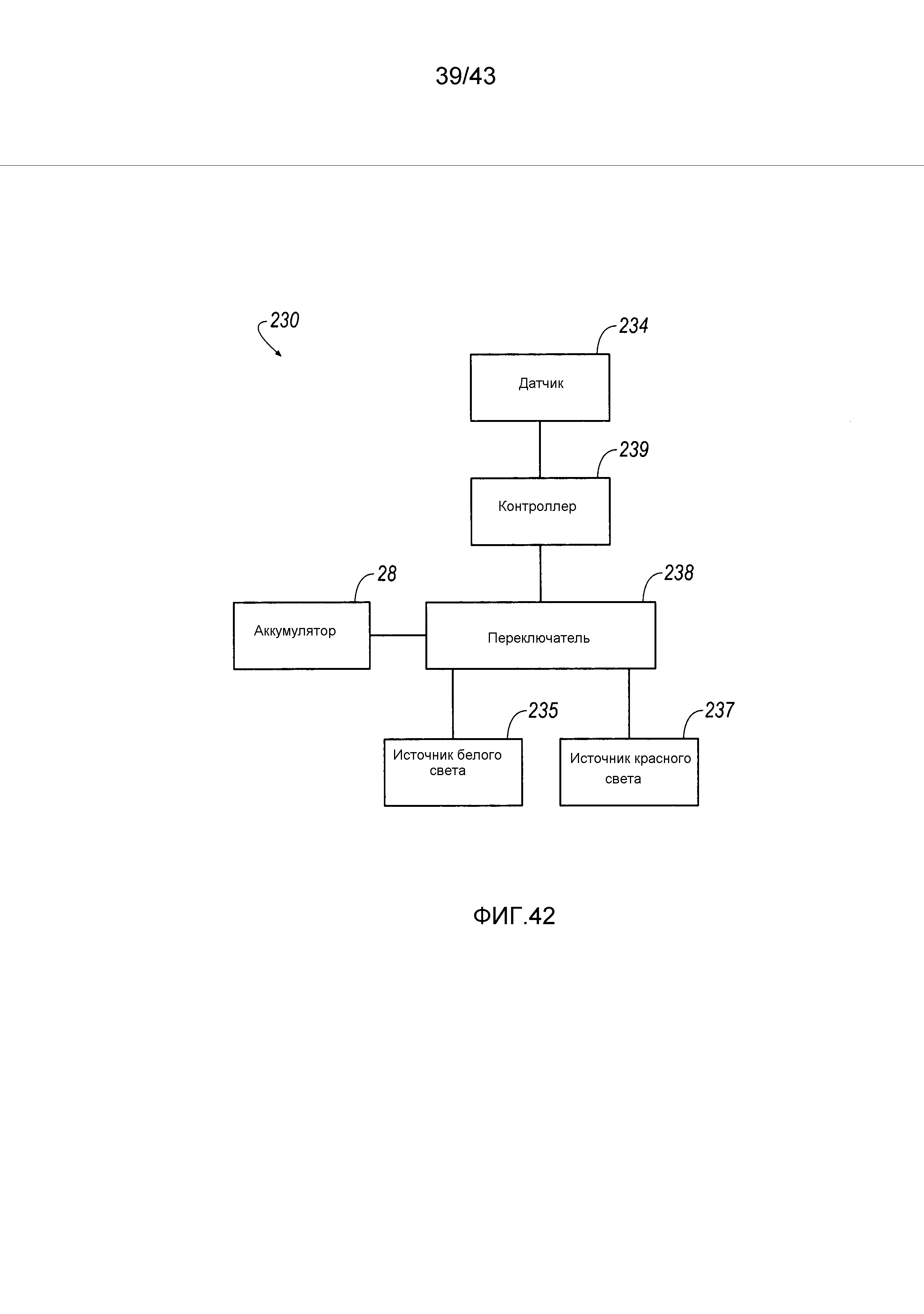
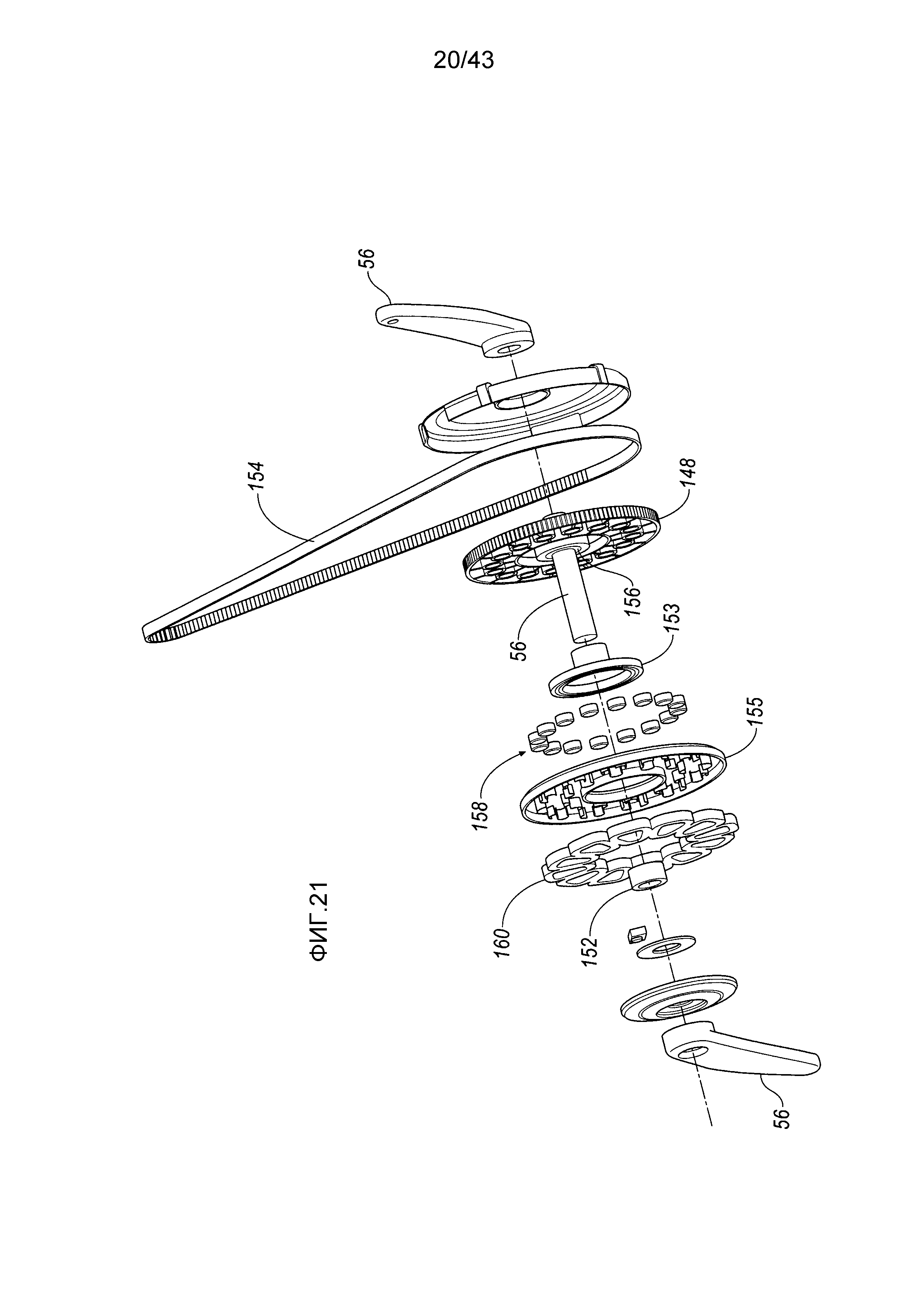
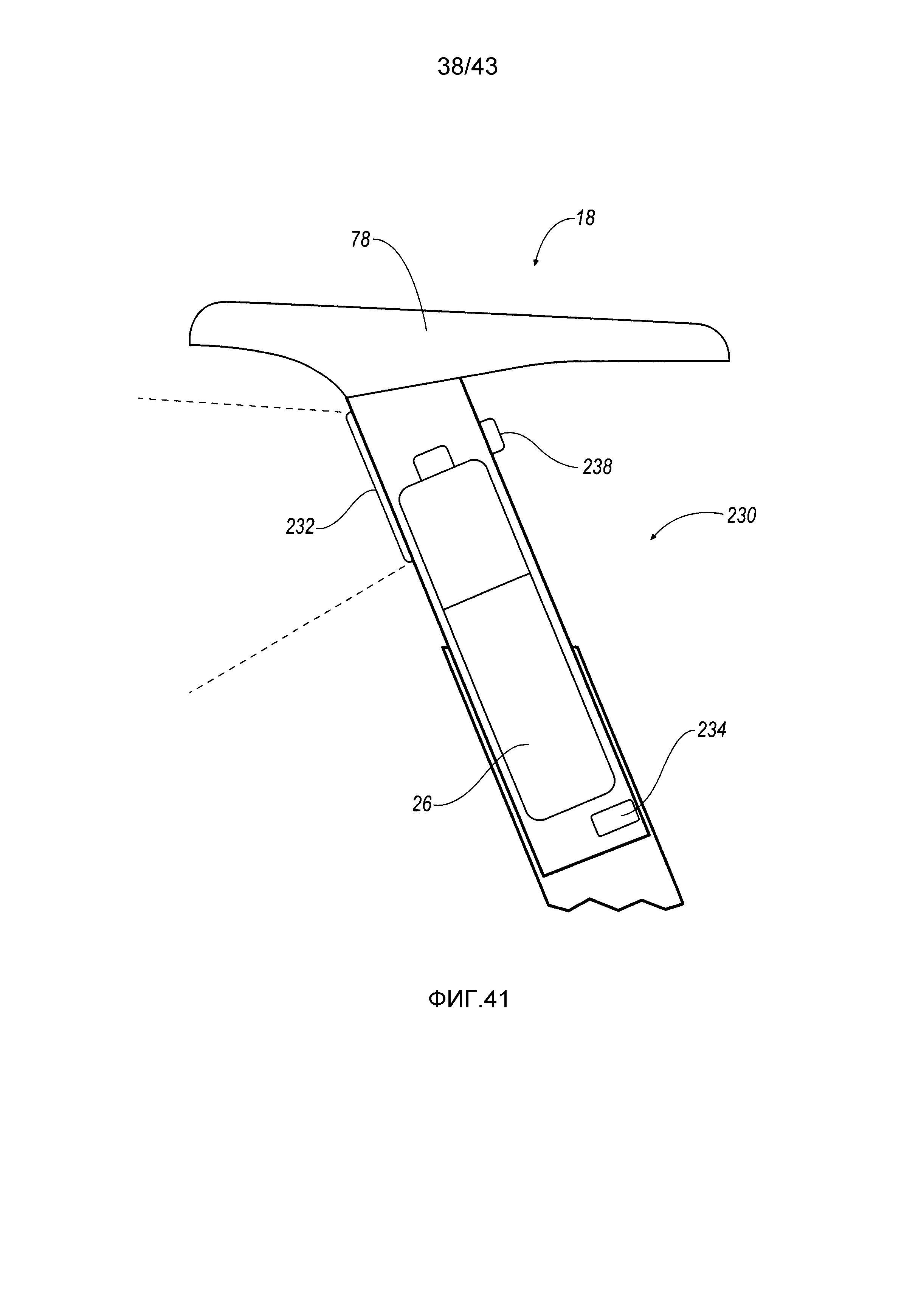
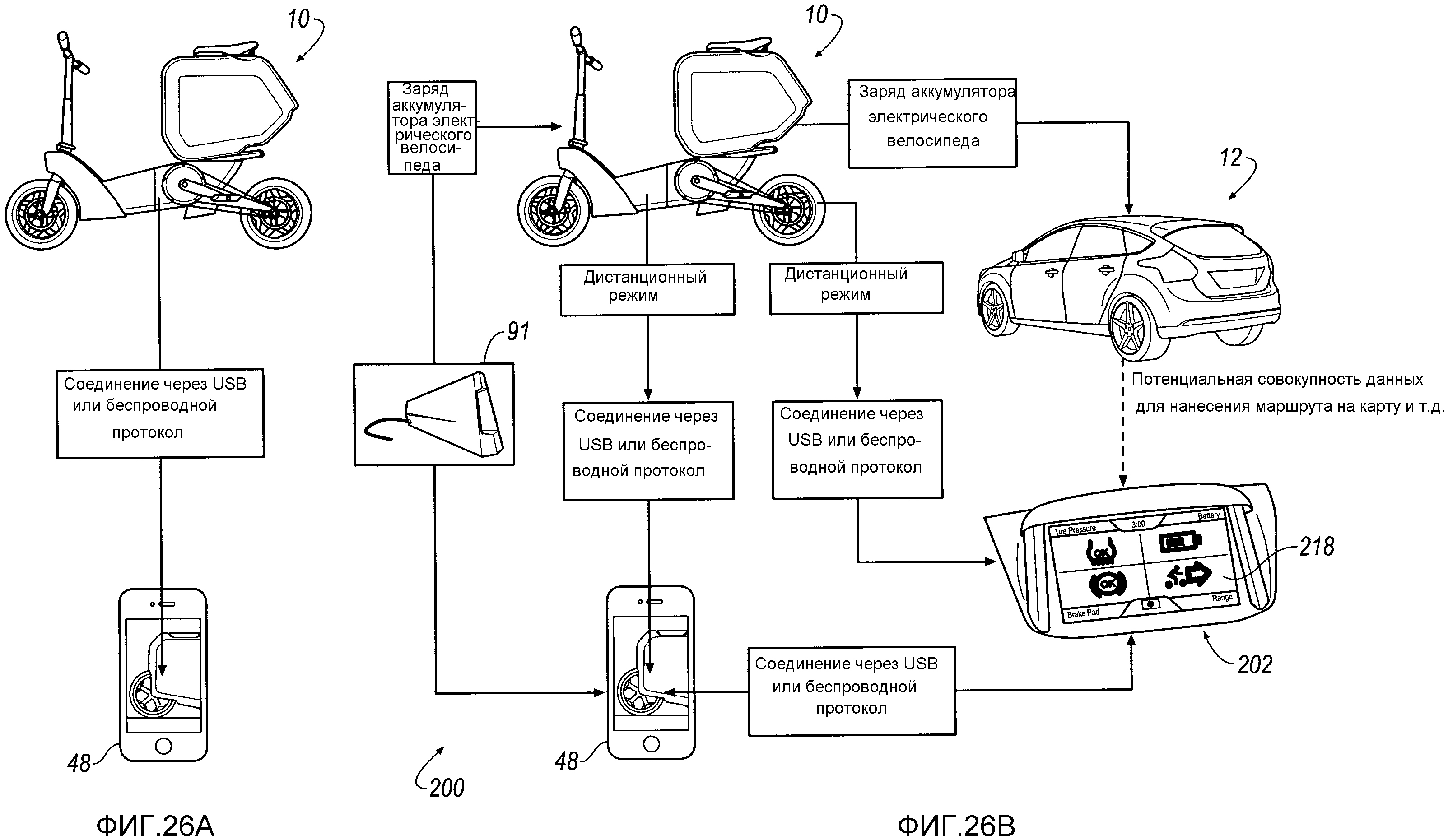
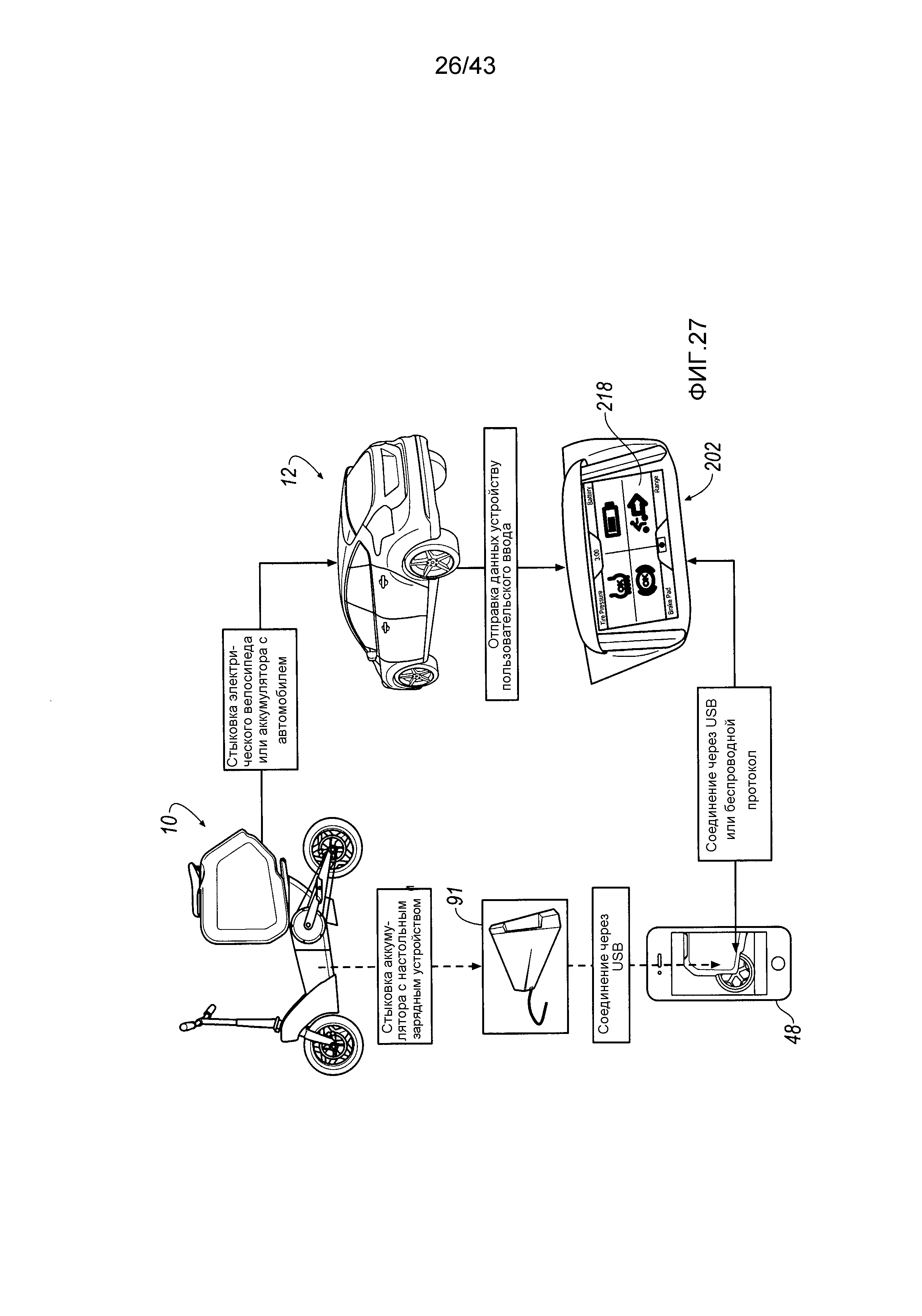
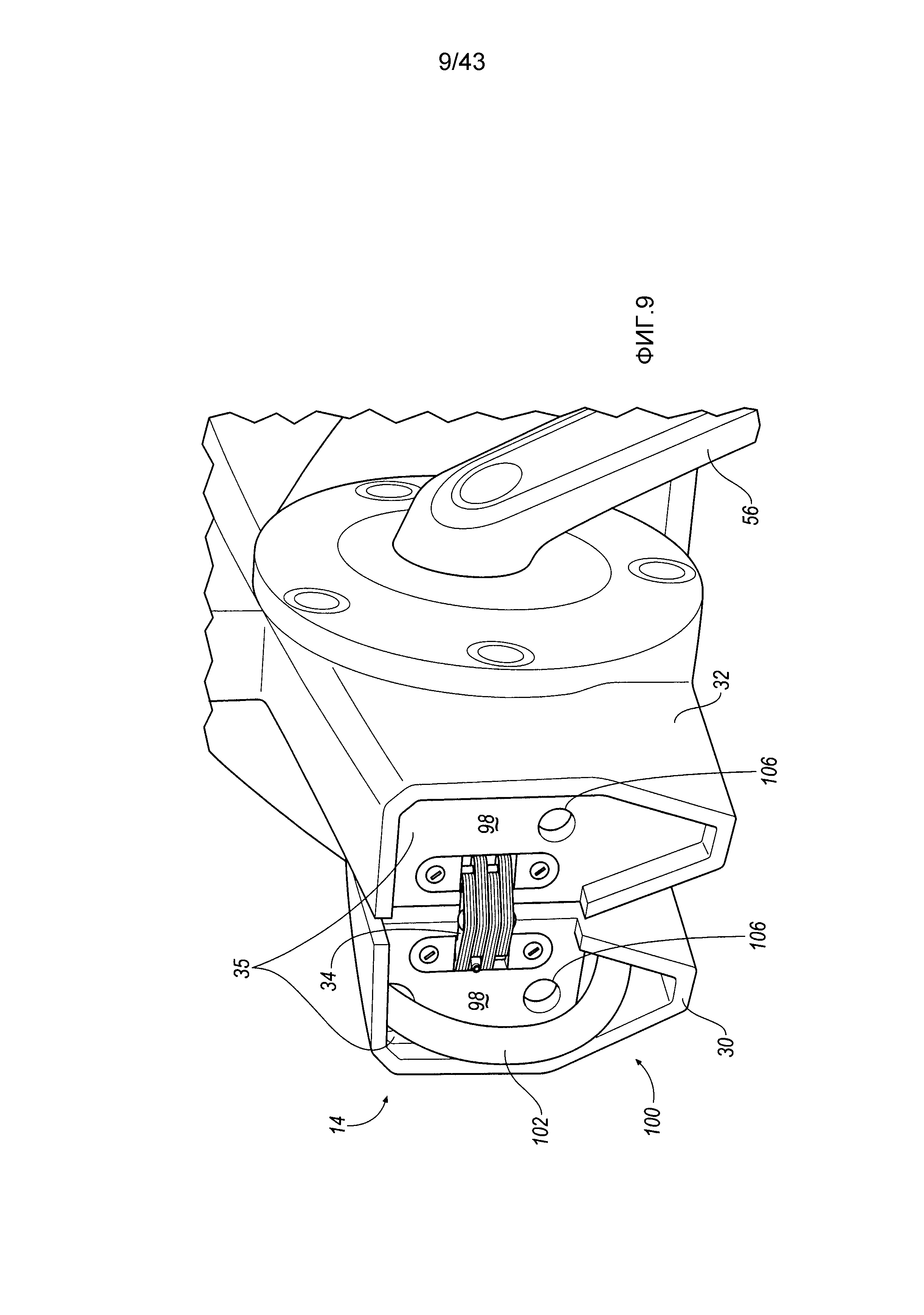
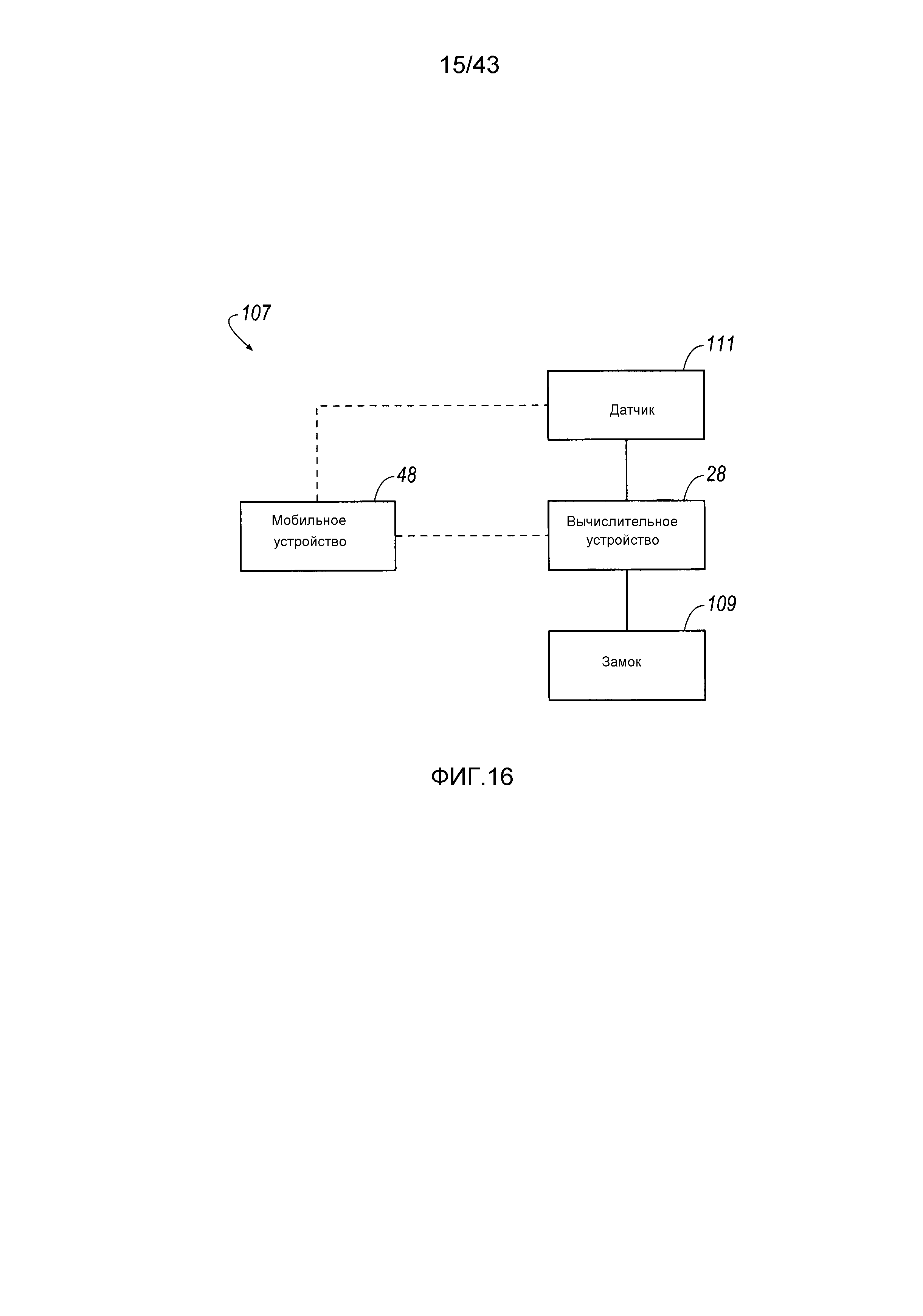
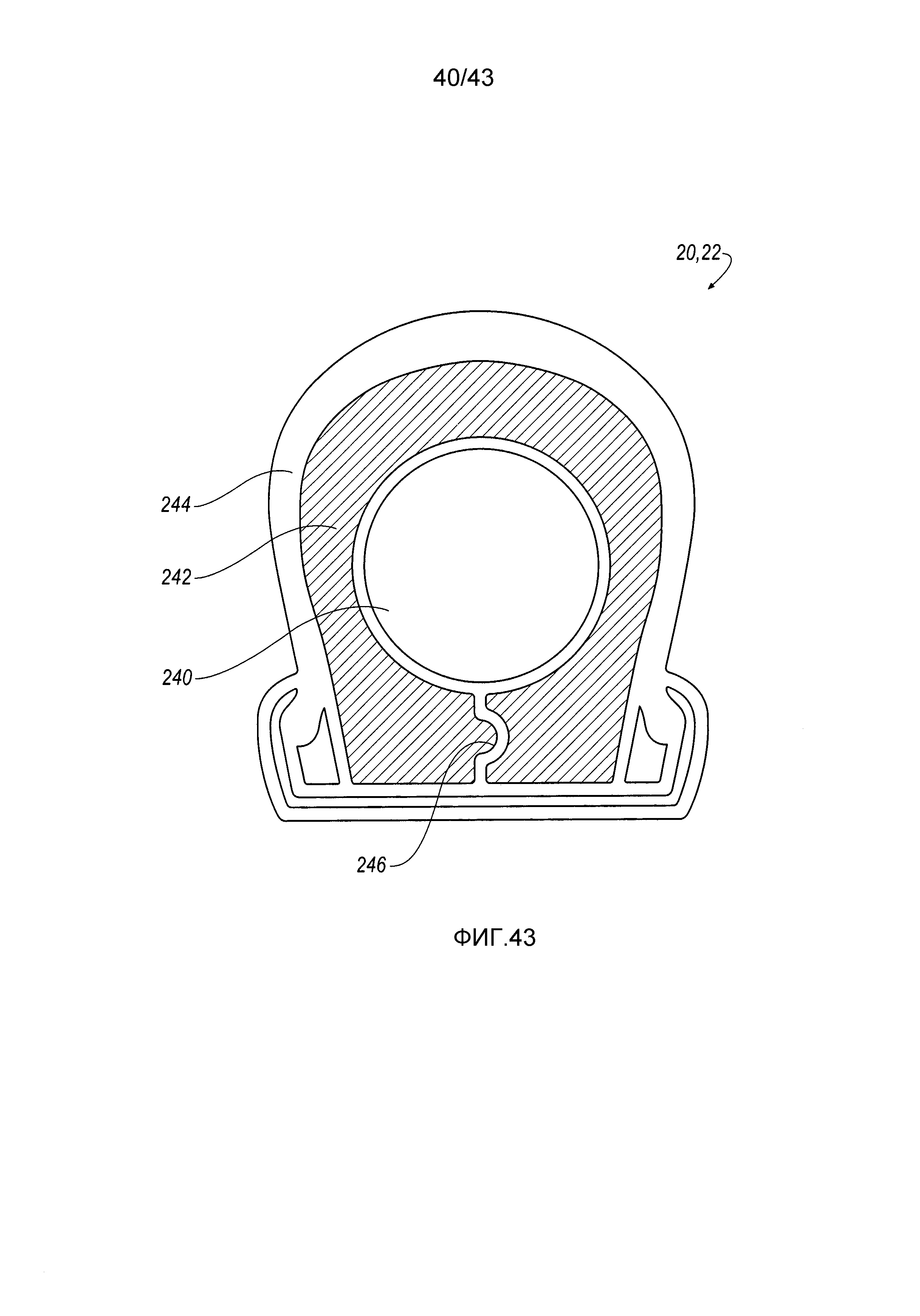
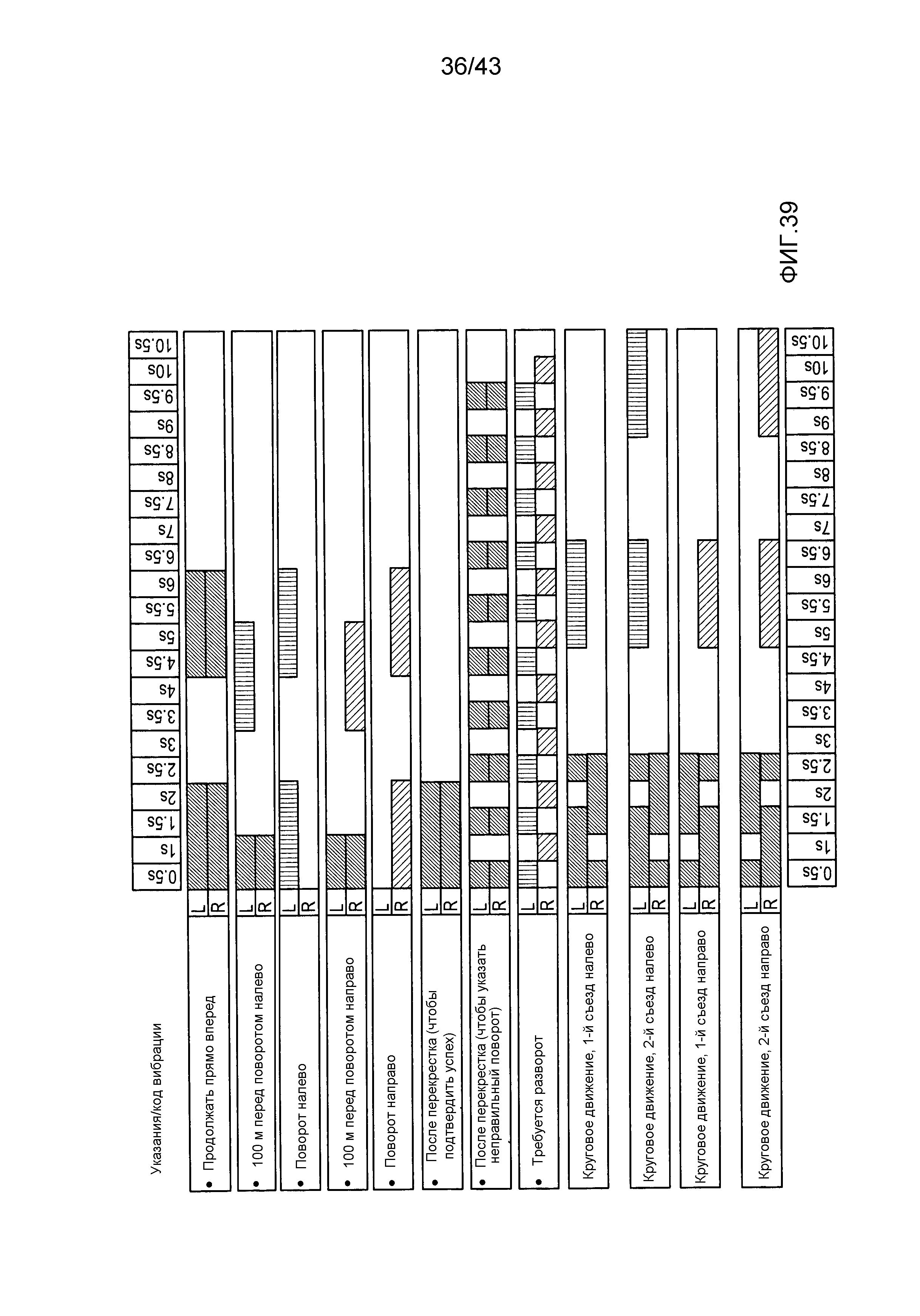
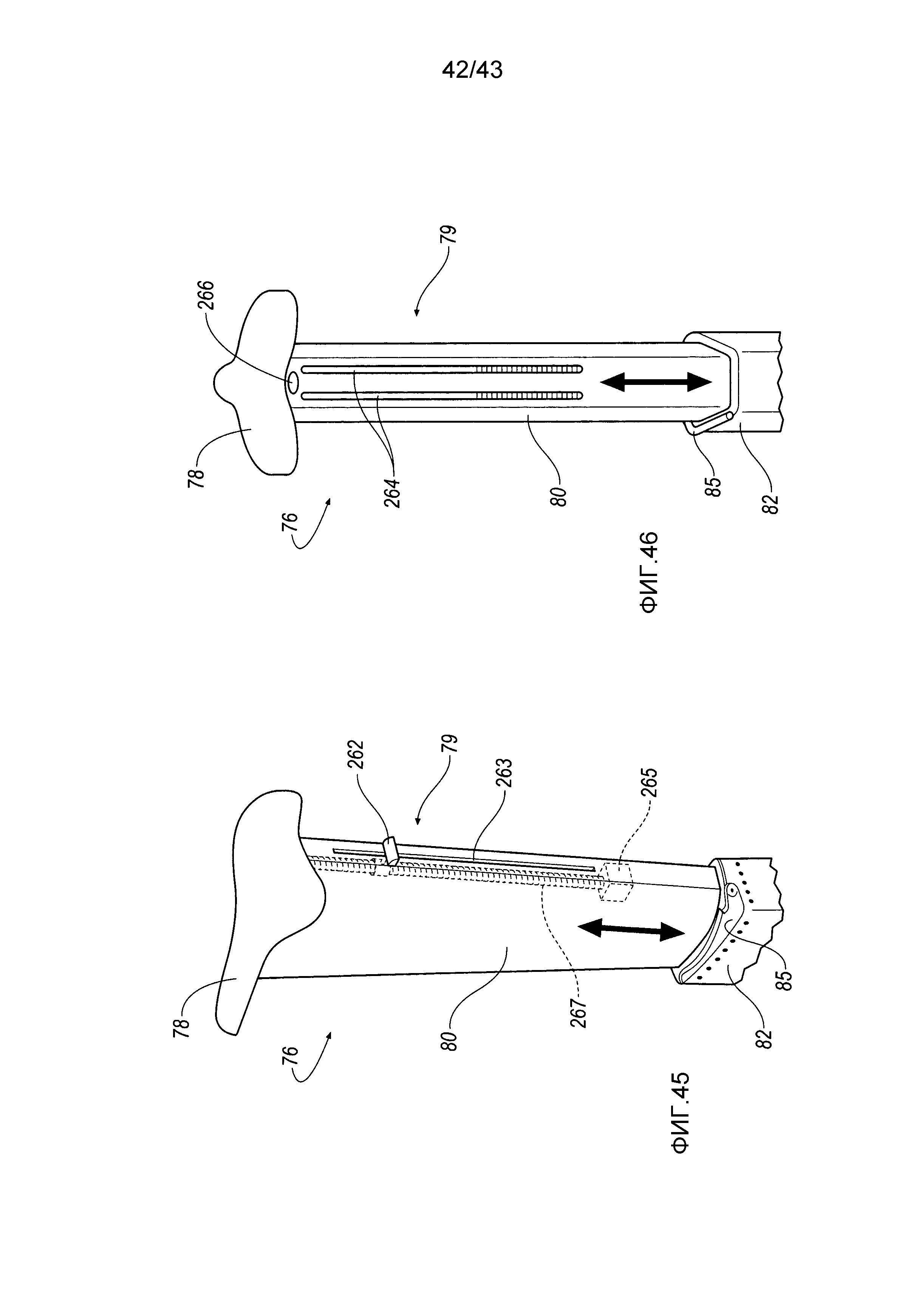
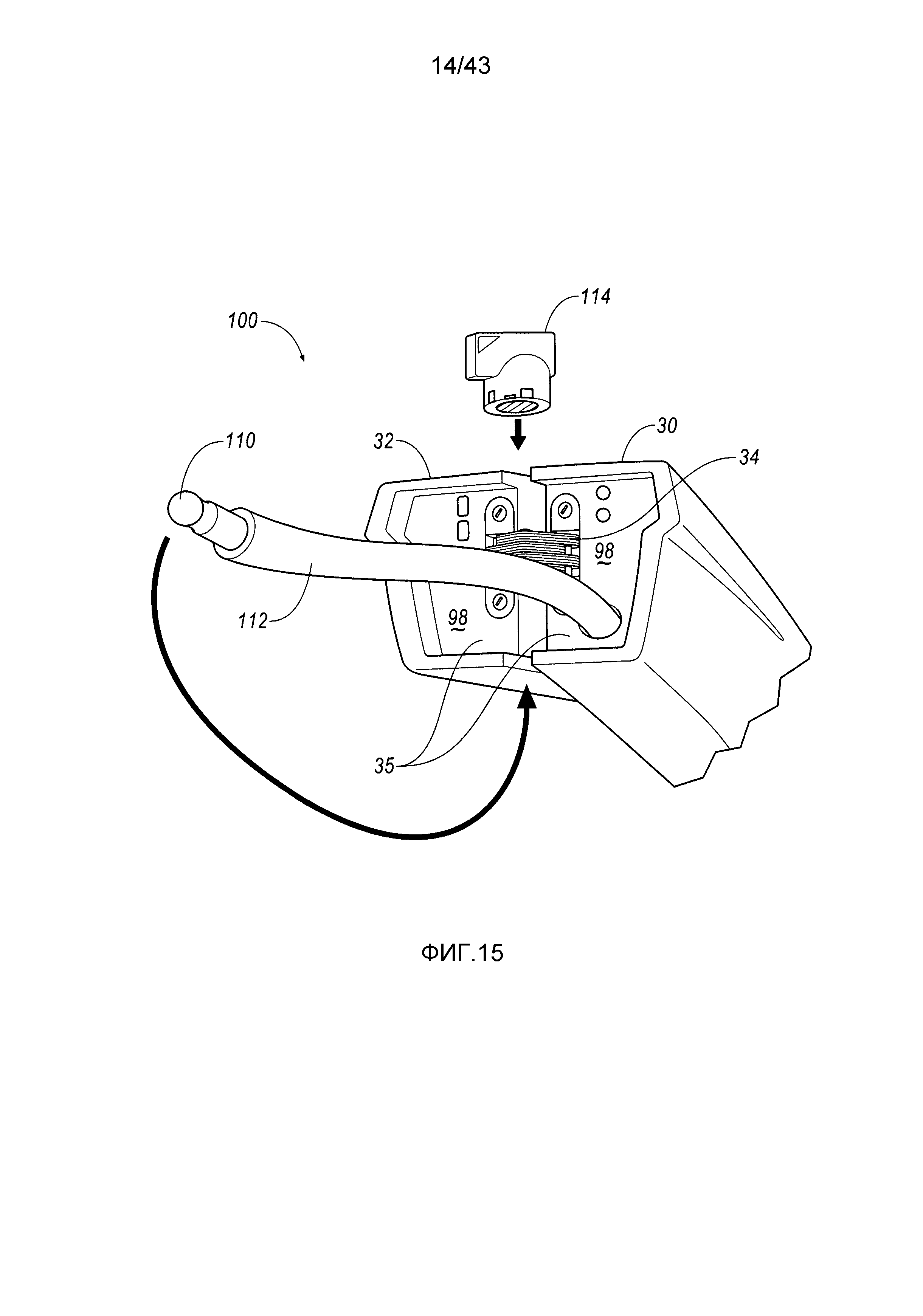
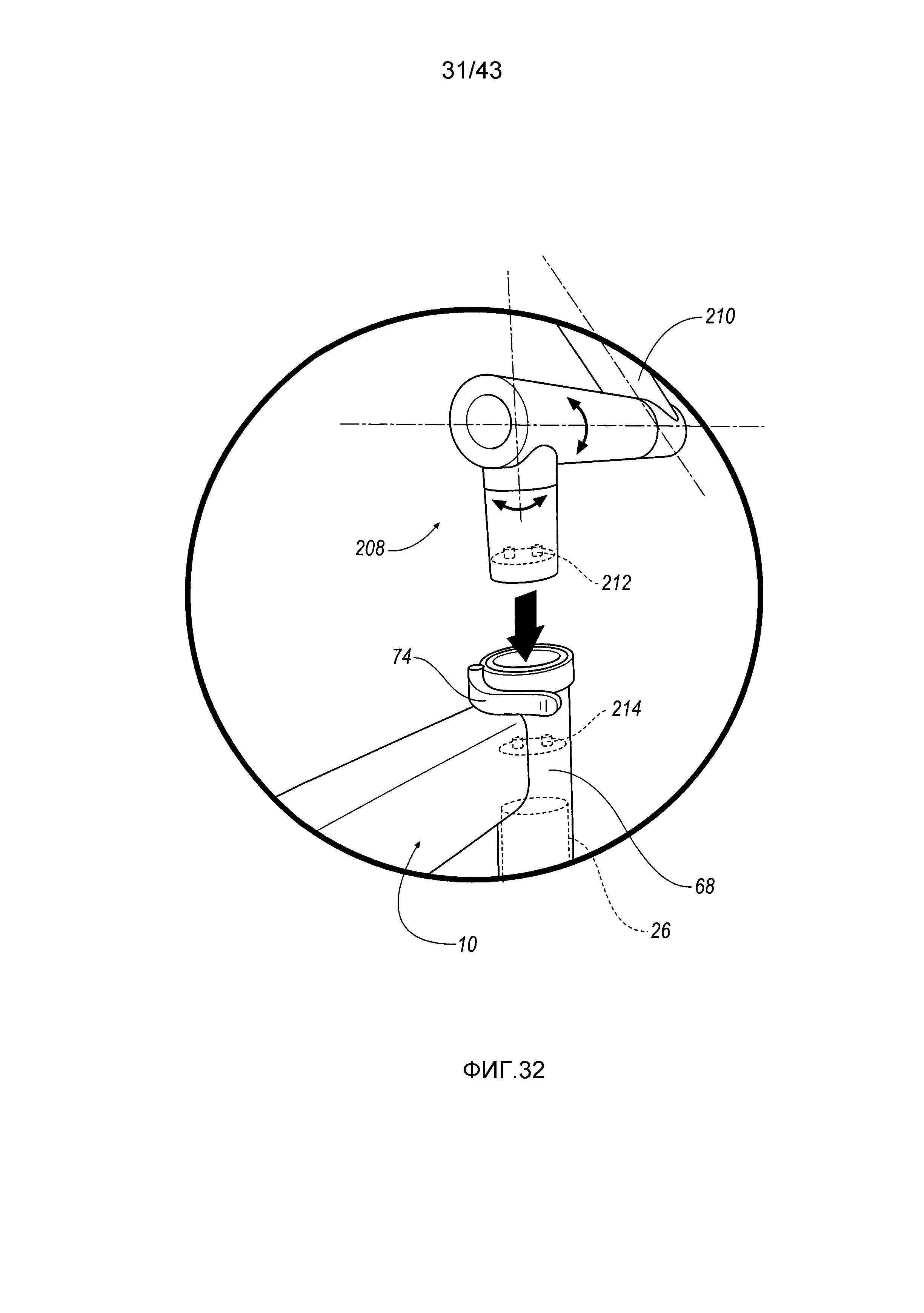
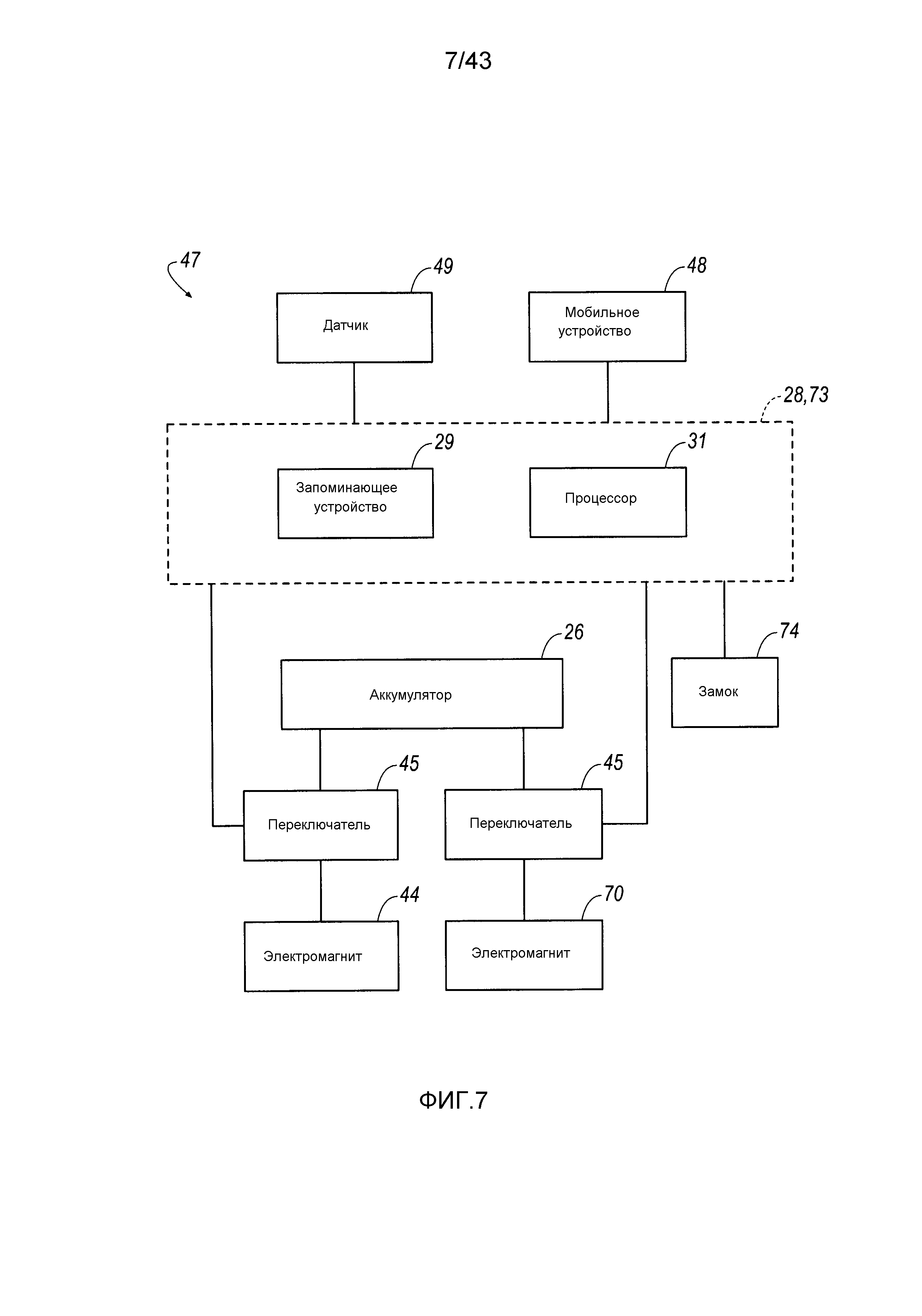
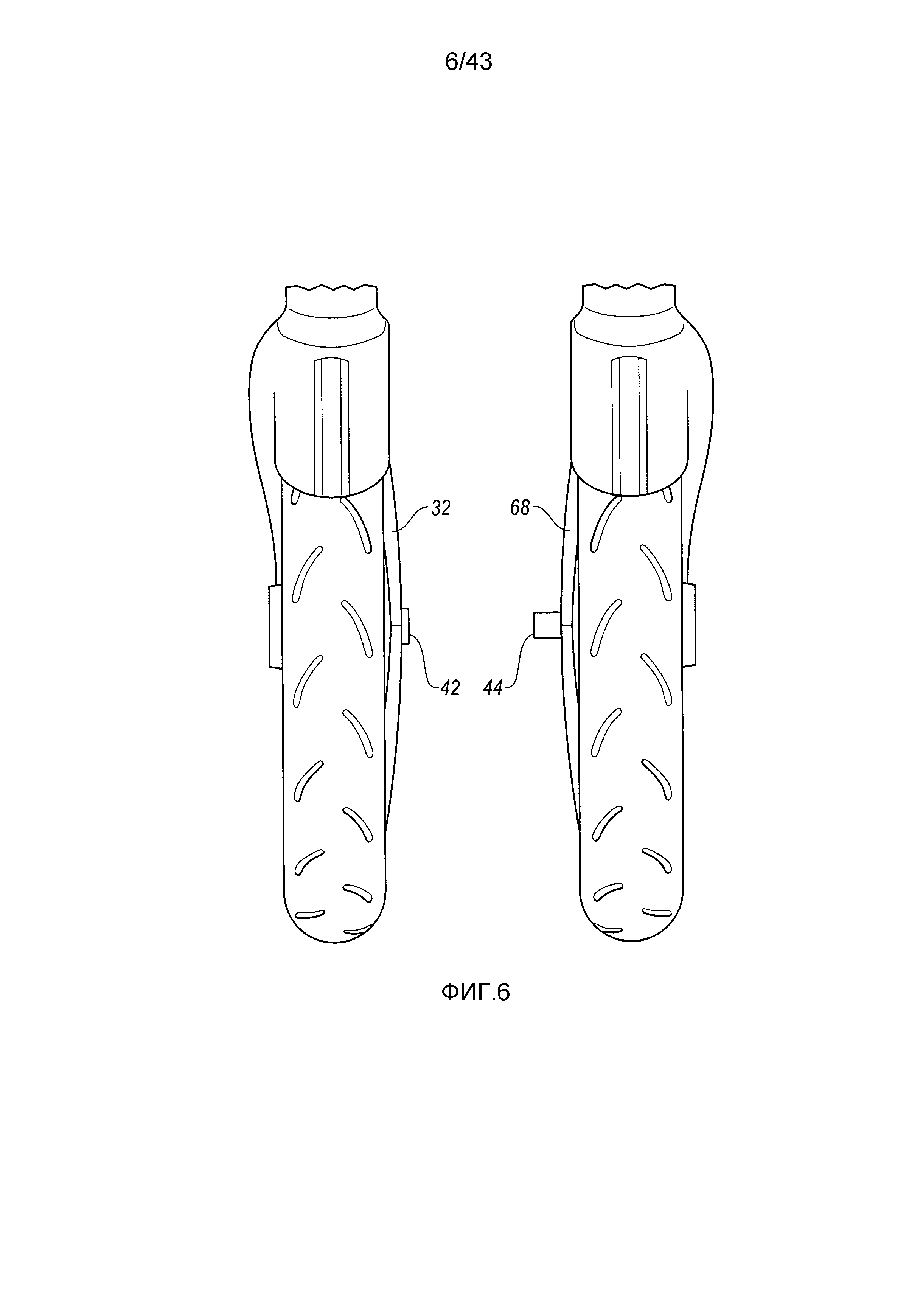
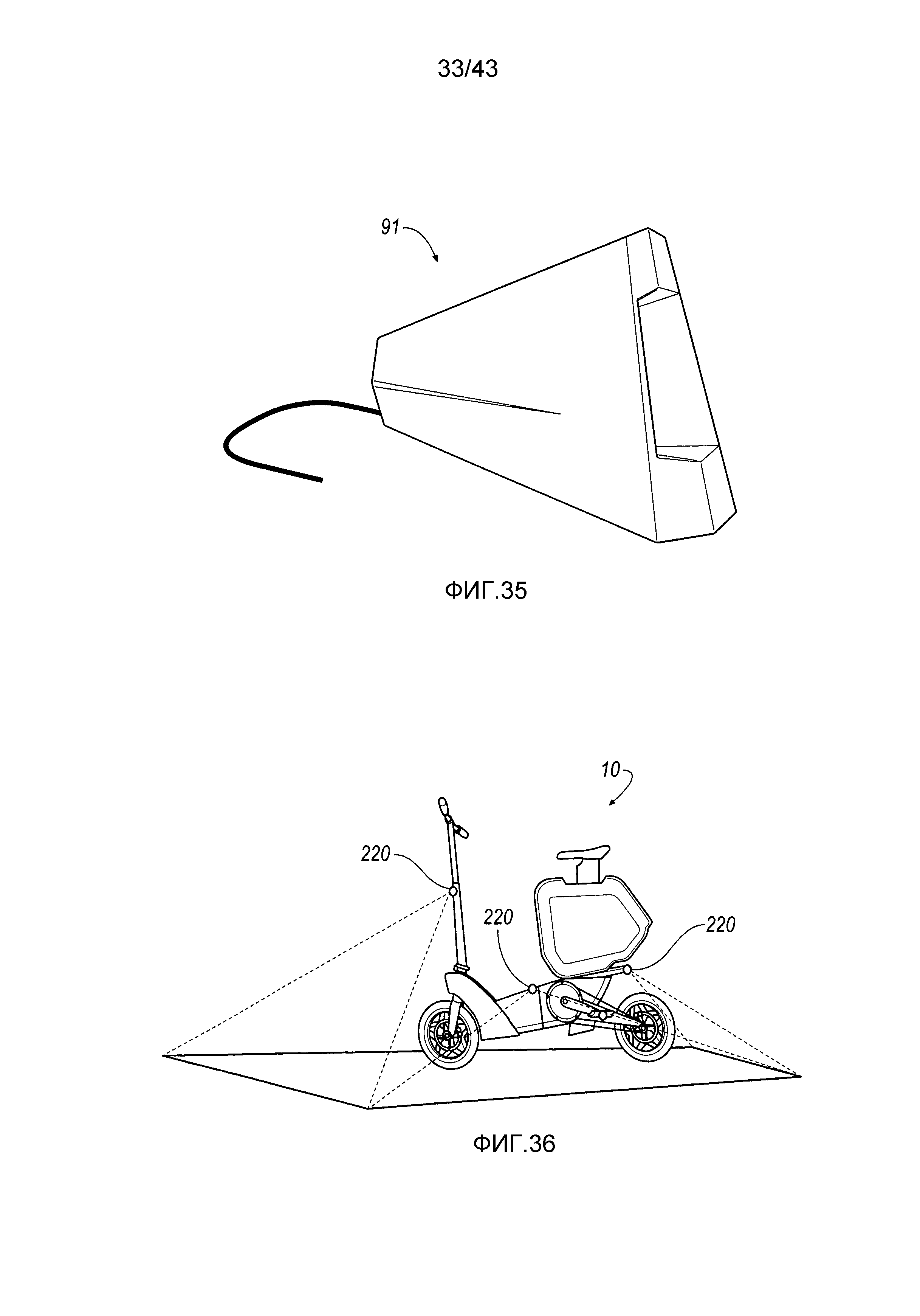
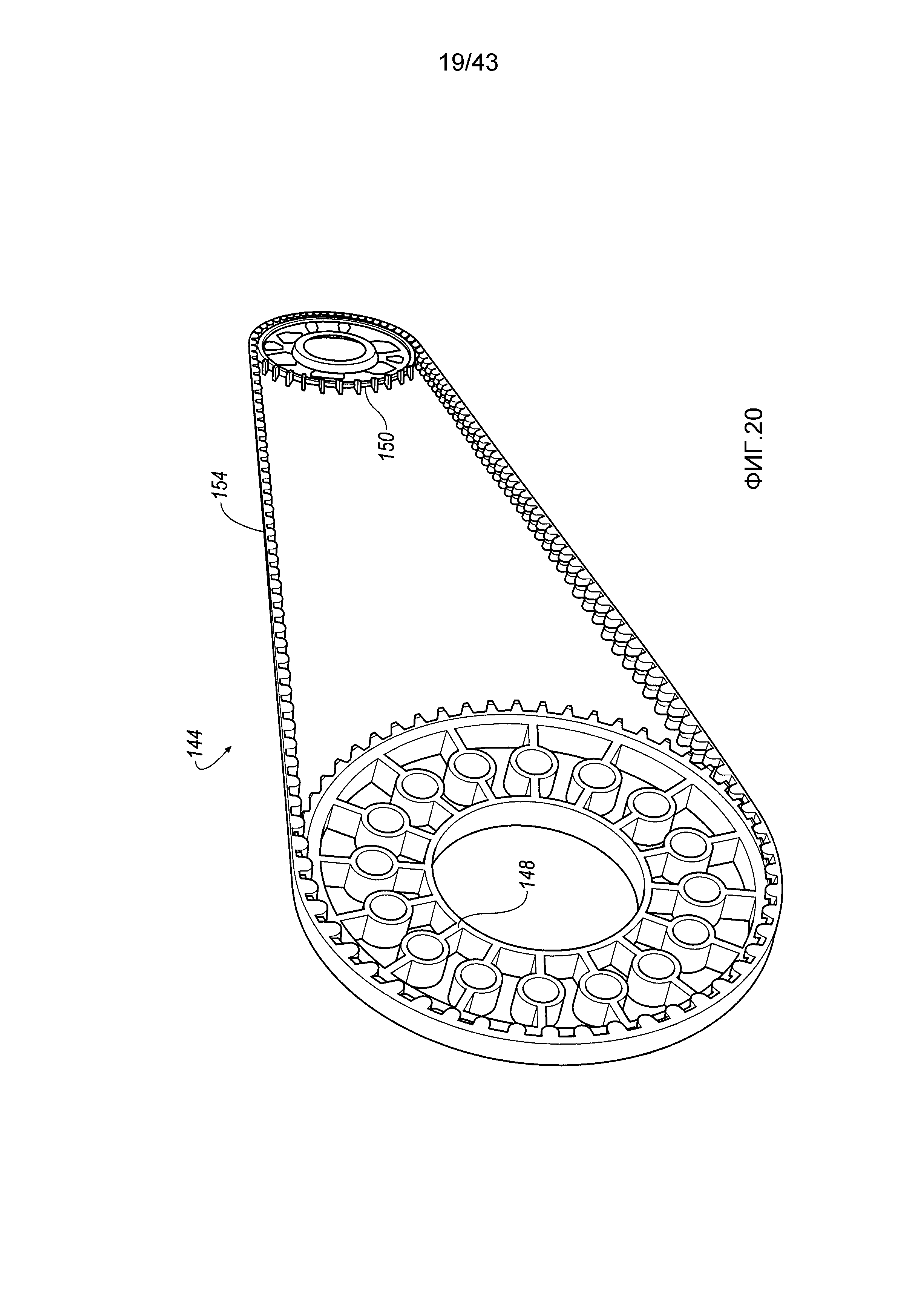
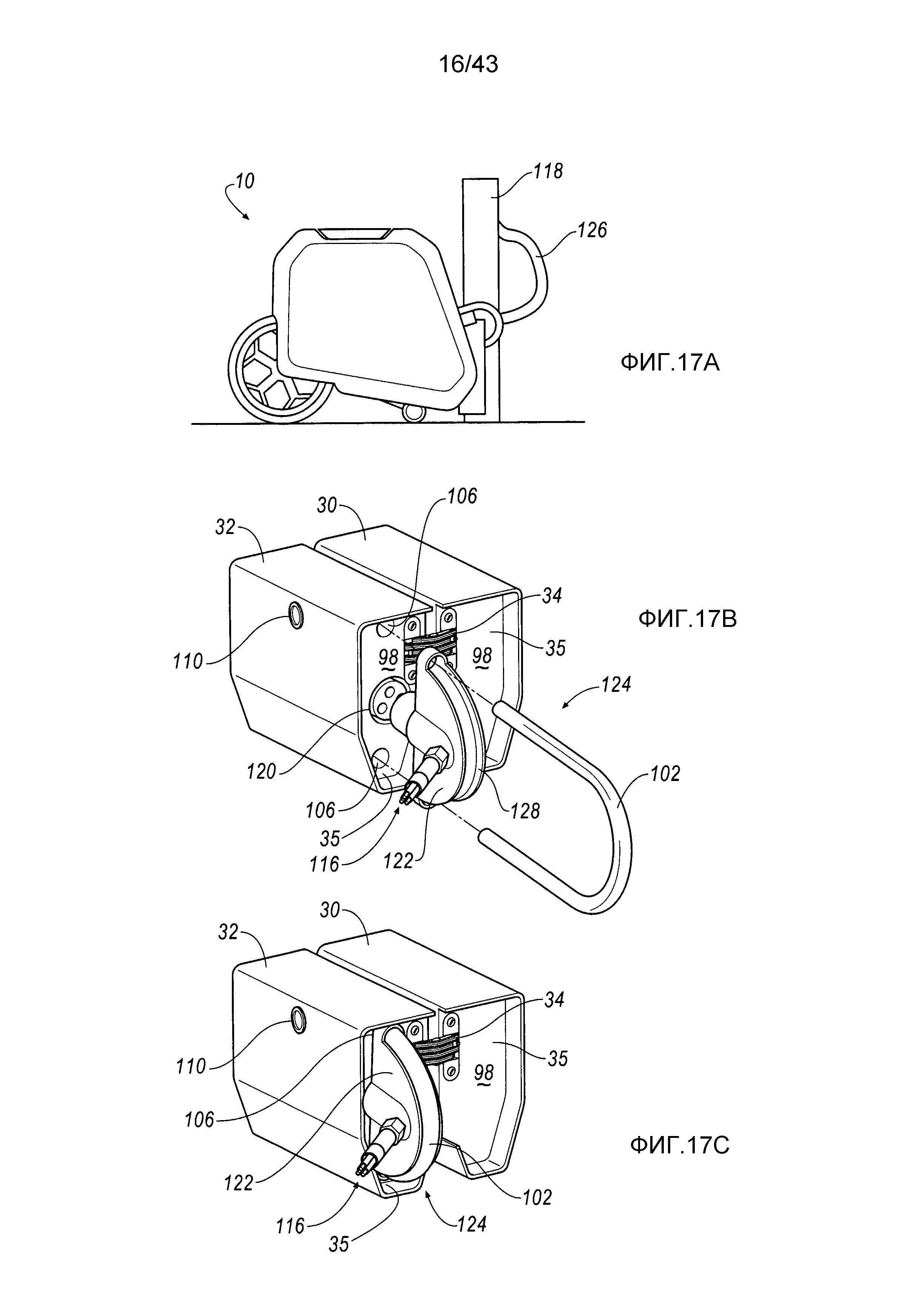
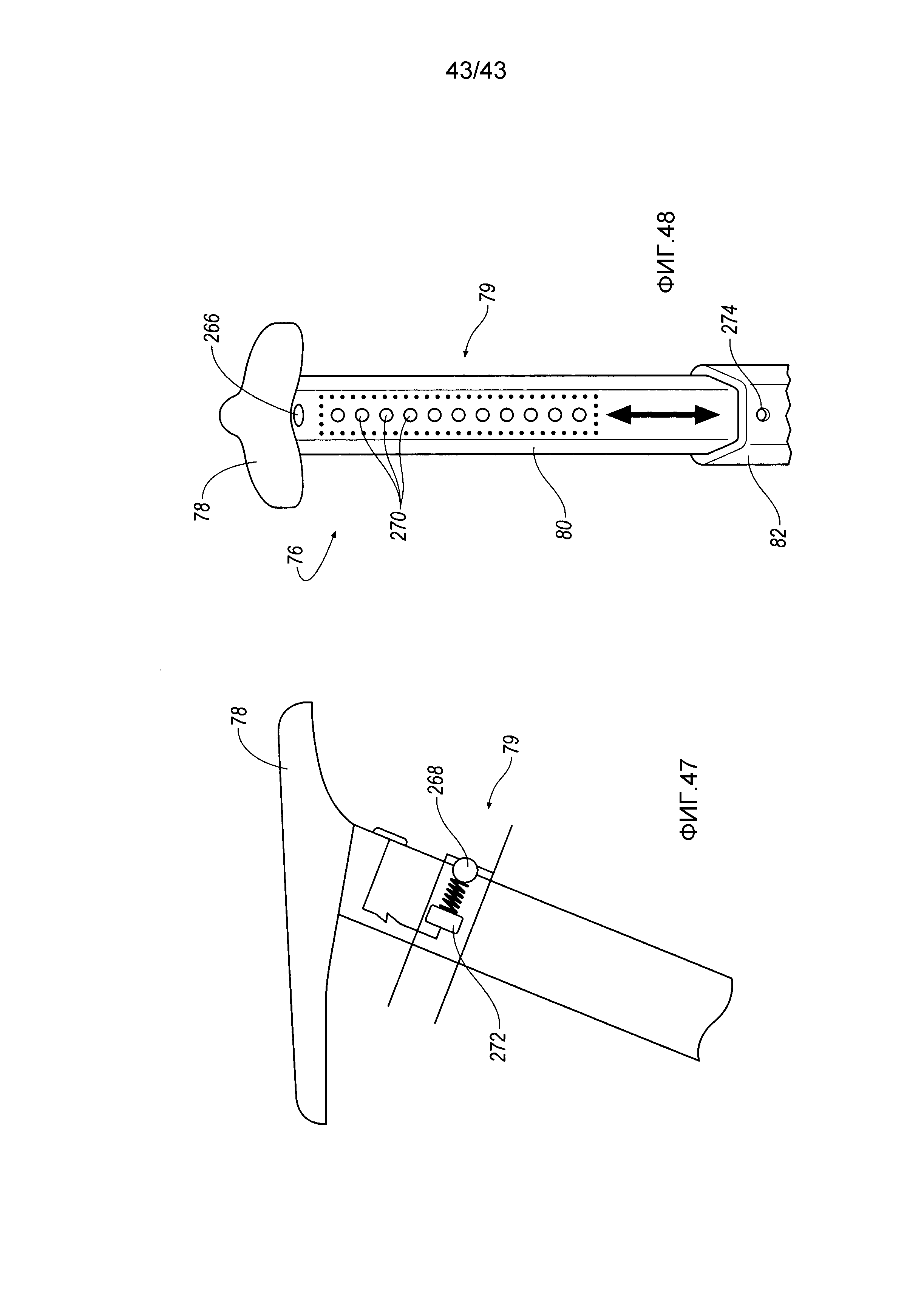
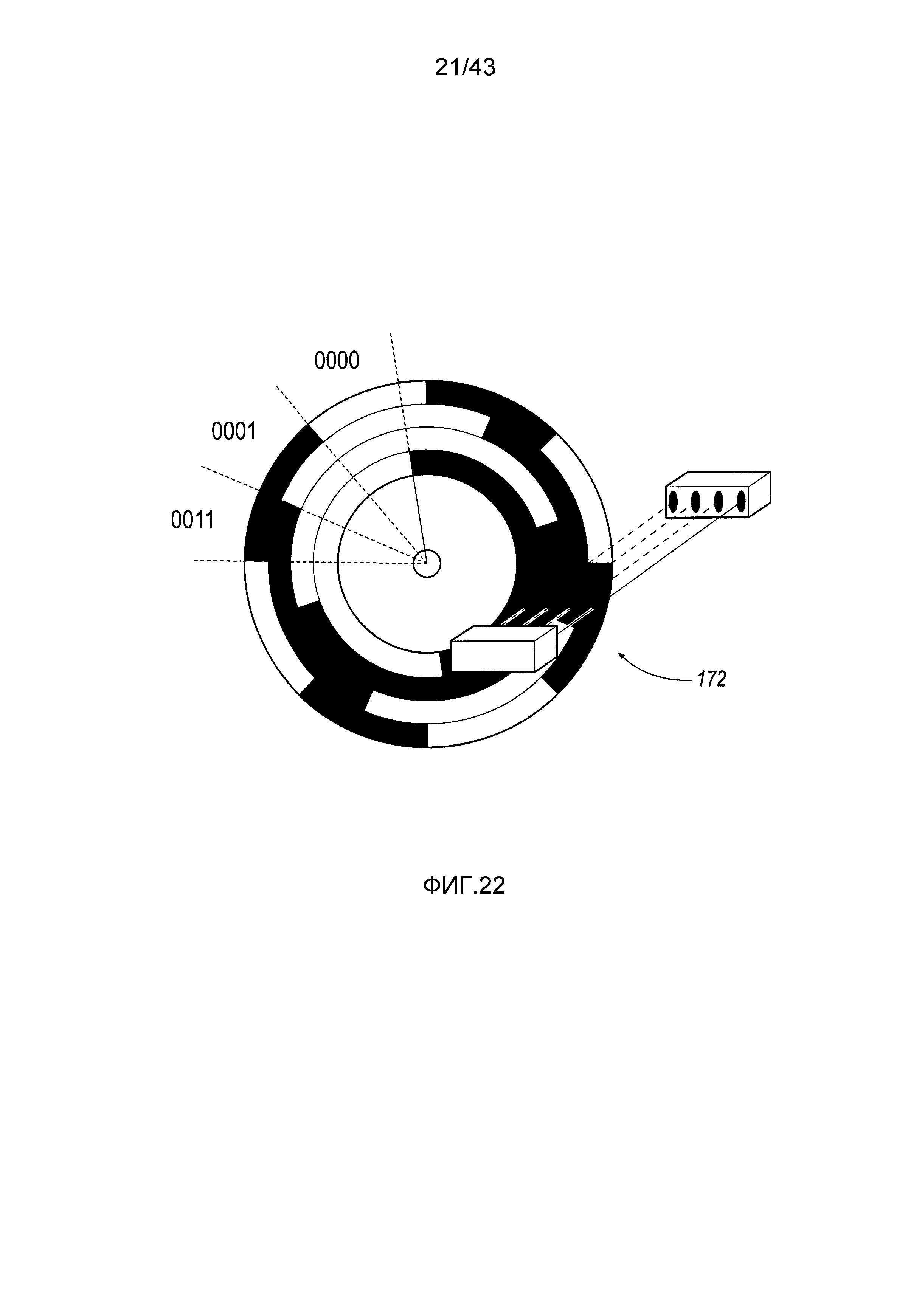
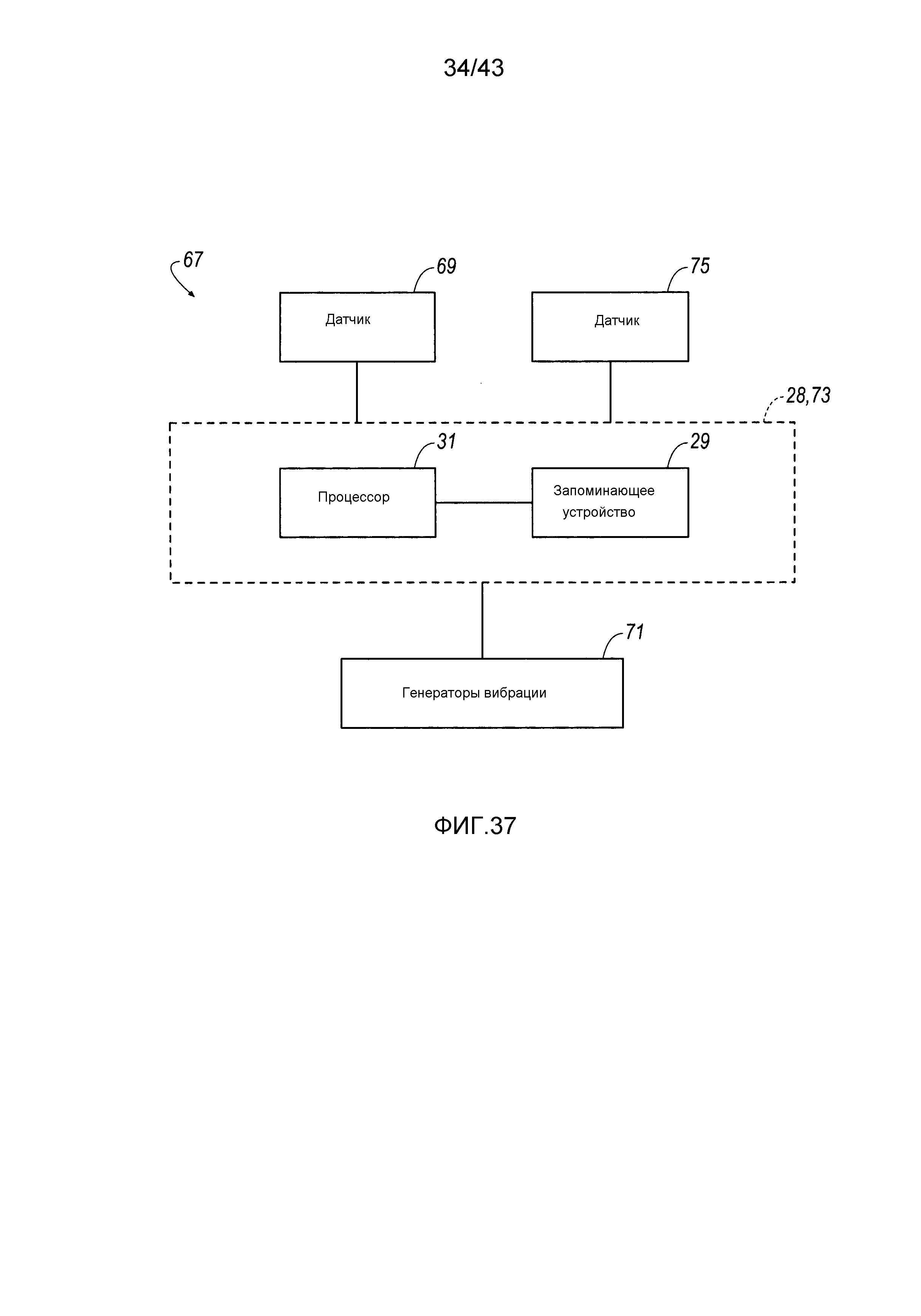
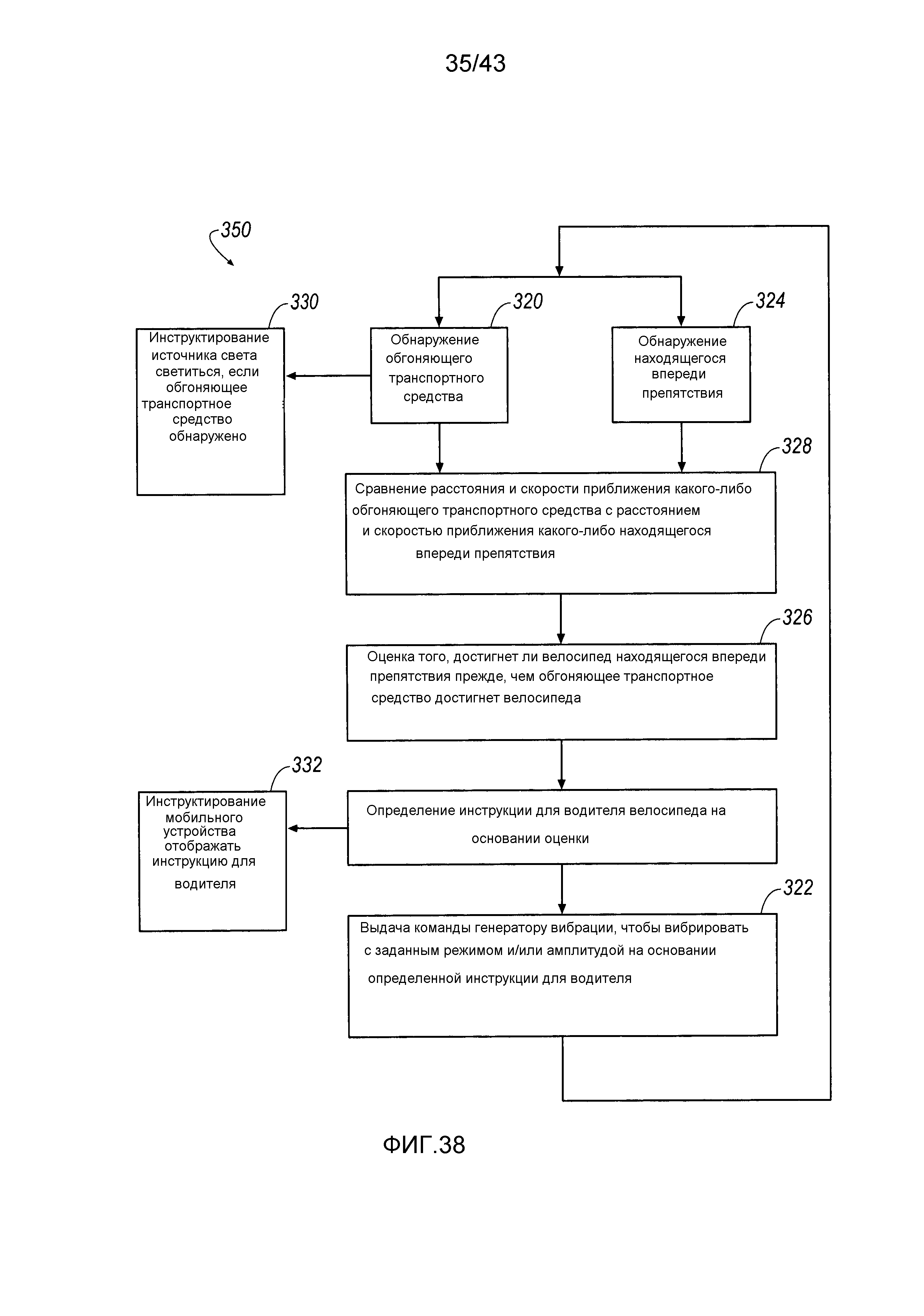
Устройство и способ бортовой диагностики для моторного транспортного средства
Способ диагностики системы охлаждения транспортного средства (варианты) и транспортное средство
Автомобильная дверь (варианты)
Вставка приборной панели
Способ для двигателя
Способ подачи разрежения в двигатель (варианты), двигатель и способ для двигателя
Способ приведения в действие двигателя, топливная система и способ впрыска топлива в двигатель
Способ снижения выбросов транспортного средства (варианты) и система снижения выбросов транспортного средства
Способ приведения в действие двигателя с наддувом (варианты) и система двигателя
Контур охлаждающей жидкости
Электрический велосипед
Электрический велосипед
Моторное транспортное средство
Тележка с изменяемой конфигурацией
Крышка для комбинированного зарядного гнезда

