Результат интеллектуальной деятельности: УСОВЕРШЕНСТВОВАНИЯ СПУТНИКОВЫХ СПОСОБОВ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
Вид РИД
Изобретение
Это изобретение относится к усовершенствованным спутниковым способам определения местоположения и в частности, к усовершенствованным способам определения расстояния между спутником и приемником. Спутниковые системы определения местоположения, такие как глобальная навигационная спутниковая система, используют для точного определения положения приемника на земле. Для этого требуется точное знание расстояния между спутником и приемником. Для вычисления этого расстояния необходимо иметь точное время прохождения сигнала от спутника к приемнику. Его получают включением в сигнал показателя точного момента времени, в который сигнал уходит со спутника. В таком случае путем определения точного момента времени прихода сигнала на приемник можно вычислить время, необходимое для прохождения сигнала от спутника к приемнику.
Чтобы определить время прихода сигнала на приемник, прежде всего следует захватить сигнал. Для этого сигнал может содержать часть кода, известного как код дальности. Код дальности опознается в приемнике. При попытке идентифицировать код дальности приемник выполняет операции обработки сигнала. После идентификации кода дальности приемник захватывает сигнал и считывает другую информацию, содержащуюся в сигнале. Захват сигнала в первый раз известен как обнаружение. После достижения обнаружения желательно, чтобы приемник оставался в контакте со спутником. Вследствие относительного перемещения спутника и приемника расстояние между спутником и приемником непрерывно изменяется и его необходимо определять. Процесс пребывания в состоянии захвата сигнала известен как отслеживание.
В известных системах низкое отношение сигнала к шуму на антенне приемника означает, что для идентификации кода дальности обычно необходимо выполнять операцию коррелирования относительно сигнала. Она обычно включает в себя неоднократное измерение амплитуды сигнала на протяжении периода времени, обычно на постоянных временных интервалах. Амплитуду, измеряемую в конкретный момент времени, умножают на амплитуду известного кода дальности в соответствующий момент времени. Далее результаты этих операций умножения суммируют. После этого процесс повторяют много раз. Каждый раз, когда процесс повторяют, операцию выборки несколько задерживают относительно предшествующей операции выборки. Когда сумма амплитуд, упомянутых выше, становится очень большой, создается хорошее соответствие между поступающим сигналом и опорными данными корреляции. В таком случае измеряют временную задержку, используемую в корреляторе. Этим способом можно получать грубую оценку времени прихода сигнала на приемник. Однако желательно получать более точное определение времени прихода, чтобы можно было более точно определять расстояние между приемником и спутником. Это особенно важно во время этапа отслеживания.
Один вид сигнала, передаваемого спутниками глобальной навигационной спутниковой системы, известен как двоичная фазовая манипуляция (ДФМ). В сигналах с двоичной фазовой манипуляцией информация о коде дальности модулируется на сигнал в виде последовательности симметричных прямоугольных импульсов (элементарных сигналов). Настоящее изобретение предназначено для приема сигнала другого вида, передаваемого спутниками глобальной навигационной спутниковой системы, который известен как бинарная смещенная несущая (БСН). В случае сигналов бинарной смещенной несущей сигнал с двоичной фазовой манипуляцией, содержащий информацию о коде дальности, сначала умножается на волновой сигнал поднесущей более высокой частоты, чем частота элементарных сигналов с двоичной фазовой манипуляцией до модулирования на сигнал. Волновой сигнал поднесущей представляет собой симметричный прямоугольный сигнал, частота которого равна частоте поднесущей.
Один известный способ захвата спутникового сигнала бинарной смещенной несущей заключается в вводе принимаемого сигнала бинарной смещенной несущей в коррелятор и использование самого сигнала бинарной смещенной несущей (который опознается приемником) в качестве опорного сигнала корреляции. При использовании такого способа вариация выходного сигнала коррелятора в зависимости от времени имеет форму последовательности узких пиков с постепенно увеличивающейся высотой до тех пор, пока не достигается максимальный пик, за которым следует последовательность узких пиков с постепенно уменьшающейся высотой. Этот способ имеет недостаток, заключающийся в том, что экономически неэффективно выполнять операции выборки с достаточно малым временным шагом, при котором максимальный пик надежно идентифицируется.
Другой способ захвата сигнала заключается в выполнении корреляции только относительно составляющих сигнала бинарной смещенной несущей, находящихся в той или иной из двух частотных полос, в которой сосредоточена энергия сигнала, известных как боковые полосы. Центр верхней боковой полосы смещен по частоте от центра всего сигнала бинарной смещенной несущей на величину, равную частоте исходного сигнала поднесущей. Центр нижней полосы частот смещен по частоте от центра всего сигнала бинарной смещенной составляющей на величину, равную отрицательной величине частоты исходного сигнала поднесущей. Извлечение только верхней полосы из сигнала бинарной смещенной несущей можно выполнять при использовании цифрового понижающего преобразователя (ЦПП). Это приводит к сигналу, предназначенному для ввода в коррелятор, который подобен сигналу с двоичной фазовой манипуляцией, при этом код дальности в форме двоичной фазовой манипуляции используется в качестве опорного сигнала коррелятора. При использовании этого способа, который называется способом одной боковой полосы, выходной сигнал коррелятора имеет такую же форму, которая имеется для сигнала с двоичной фазовой манипуляции; он возрастает линейно до пика и затем спадает линейно. При использовании этого способа труднее точно оценивать момент возникновения пика выходного сигнала корреляции. Вследствие этого оценка времени прихода сигнала, получаемая этим способом, является весьма грубой.
Другие известные способы включают в себя модификацию поступающего сигнала и обработку результирующего модифицированного сигнала при попытке извлечения информации о временной задержке между поступающим сигналом и модифицирующим сигналом и посредством этого получения улучшенной оценки времени прихода. Такие способы являются сложными и требующими относительно большой вычислительной мощности и поэтому требующими больших затрат.
В настоящее время разработан альтернативный способ точного определения времени прихода сигнала.
Согласно первому аспекту изобретения предложен способ определения времени прихода поступающего спутникового сигнала на приемник, содержащий прием поступающего сигнала, умножение поступающего сигнала на первый вещественнозначный периодический модифицирующий сигнал для образования первого модифицированного выходного сигнала, коррелирование первого модифицированного выходного сигнала для получения первого выходного сигнала корреляции, умножение поступающего сигнала на второй вещественнозначный периодический модифицирующий сигнал для образования второго модифицированного выходного сигнала, коррелирование второго модифицированного выходного сигнала для образования второго выходного сигнала корреляции и сравнение первого выходного сигнала корреляции со вторым выходным сигналом корреляции.
Этот способ является эффективным, поскольку сравнение первого и второго выходных сигналов корреляции позволяет точно оценивать время прихода получаемого сигнала при использовании меньшей вычислительной мощности по сравнению с известными способами. В частности, умножение на вещественнозначный сигнал является менее сложным и затратным, чем умножение на комплекснозначный сигнал.
Этап сравнения первого и второго выходных сигналов корреляции может содержать вычисление отношения первого и второго выходных сигналов корреляции и может содержать вычисление арктангенса угла, пропорционального отношению первого и второго выходных сигналов корреляции.
Этап умножения первого участка поступающего сигнала на первый вещественнозначный периодический модифицирующий сигнал и/или этап умножения второго участка поступающего сигнала на второй вещественнозначный периодический модифицирующий сигнал содержит применение битового потока к первому и/или второму участкам поступающего сигнала, соответственно. Битовый поток может содержать множество битов, при этом каждый бит имеет значение +1 или -1. Положительные стороны этого заключаются в том, что способ можно выполнять при использовании простого устройства и необходима всего лишь небольшая вычислительная мощность.
Первый и/или второй выходные сигналы корреляции могут изменяться синусоидально в зависимости от временной задержки между поступающим сигналом и первым и/или вторым модифицирующими сигналами, соответственно. Поступающий сигнал может содержать сигнал идентификатора. Этап коррелирования первого и второго модифицированных выходных сигналов может содержать использование опорного сигнала корреляции, который имеет такую форму, как сигнал идентификатора. Сигнал идентификатора может содержать код дальности. Поступающий сигнал может содержать сигнал поднесущей, модулированный сигналом идентификатора. Сигнал поднесущей может быть периодическим и может иметь более высокую частоту, чем сигнал идентификатора. В общем случае сигнал поднесущей может иметь форму симметричного прямоугольного сигнала. Сигнал идентификатора может содержать сигнал с двоичной фазовой манипуляцией. Поступающий сигнал может быть сигналом бинарной смещенной несущей. Принимаемый поступающий сигнал можно демодулировать до умножения на первый и второй вещественнозначные периодические модифицирующие сигналы.
Первый вещественнозначный модифицирующий сигнал может иметь известную зависимость по отношению к второму вещественнозначному модифицирующему сигналу. Первый вещественнозначный модифицирующий сигнал может быть подобен по форме второму вещественнозначному модифицирующему сигналу. Может иметься заданная временная задержка между первым и вторым модифицирующими сигналами. Первый модифицирующий сигнал может быть синус-фазированным. Второй модифицирующий сигнал может быть косинус-фазированным. Первый и/или второй модифицирующие сигналы могут иметь аналогичную или по существу одинаковую частоту с составляющей поступающего сигнала. Составляющая поступающего сигнала может быть сигналом поднесущей.
Первый и второй периодические модифицирующие сигналы могут быть бинарными (двухкомпонентными) или тернарными (трехкомпонентными) сигналами. Этим можно сделать операции умножения простыми для реализации, следствием чего будет низкое энергопотребление. Дальнейшим преимуществом настоящего изобретения является то, что во время операции коррелирования нет необходимости в точной идентификации временной задержки пикового значения корреляции. Значения первого и второго выходных сигналов корреляторов, находящиеся на расстоянии от пика, имеют такую же относительную зависимость от времени прихода поступающего сигнала относительно модифицирующих сигналов; например, отношение первого и второго выходных сигналов корреляторов является по существу одинаковым как на расстоянии от пика, так и около пика.
Поступающий сигнал можно умножать на первый модифицирующий сигнал и второй модифицирующий сигнал по существу одновременно. Этапы коррелирования первого модифицированного выходного сигнала и коррелирования второго модифицированного выходного сигнала можно выполнять по существу одновременно.
Предложенный способ можно использовать в спутниковых системах определения местоположения типа глобальной навигационной спутниковой системы.
Согласно дальнейшему аспекту изобретения предложено устройство для определения времени прихода сигнала на приемник, содержащее приемник для приема поступающего сигнала, первый умножитель для умножения поступающего сигнала на первый вещественнозначный периодический сигнал, первый коррелятор, выполненный с возможностью коррелирования выходного сигнала первого умножителя, второй умножитель для умножения поступающего сигнала на второй вещественнозначный периодический сигнал, второй коррелятор, выполненный с возможностью коррелирования выходного сигнала второго умножителя, и средство для сравнения соответствующих выходных сигналов первого и второго корреляторов.
Устройство может быть выполнено с возможностью выполнения способа согласно первому аспекту изобретения. Первый и второй умножители можно выполнить так, чтобы первый и/или второй вещественнозначные периодические сигналы были бинарными (двухкомпонентными) или тернарными (трехкомпонентными) сигналами. Первый и второй умножители могут быть расположены в одном и том же блоке.
Первый умножитель можно выполнить так, чтобы первый вещественнозначный периодический сигнал был косинус-фазированным. Второй умножитель можно выполнить так, чтобы второй периодический сигнал был синус-фазированным. Средство для сравнения выходных сигналов корреляторов может быть выполнено с возможностью образования выходного сигнала, показывающего время задержки между поступающим сигналом и вещественнозначными периодическими сигналами.
Устройство можно выполнить так, чтобы при использовании сигнал, который является выходным сигналом с демодулятора, подавался на входы первого и второго умножителей. В первом и/или втором корреляторах сигнал с двоичной фазовой манипуляцией может использоваться в качестве опорного сигнала корреляторов. Средство для сравнения может содержать вычислитель, выполненный с возможностью вычисления отношения первого и второго выходных сигналов корреляторов. Вычислитель может быть выполнен с возможностью вычисления арктангенса угла, пропорционального отношению первого и второго выходных сигналов корреляторов.
Теперь только для иллюстрации предпочтительный в настоящее время вариант осуществления изобретения будет подробно описан с обращением к сопровождающим чертежам, на которых:
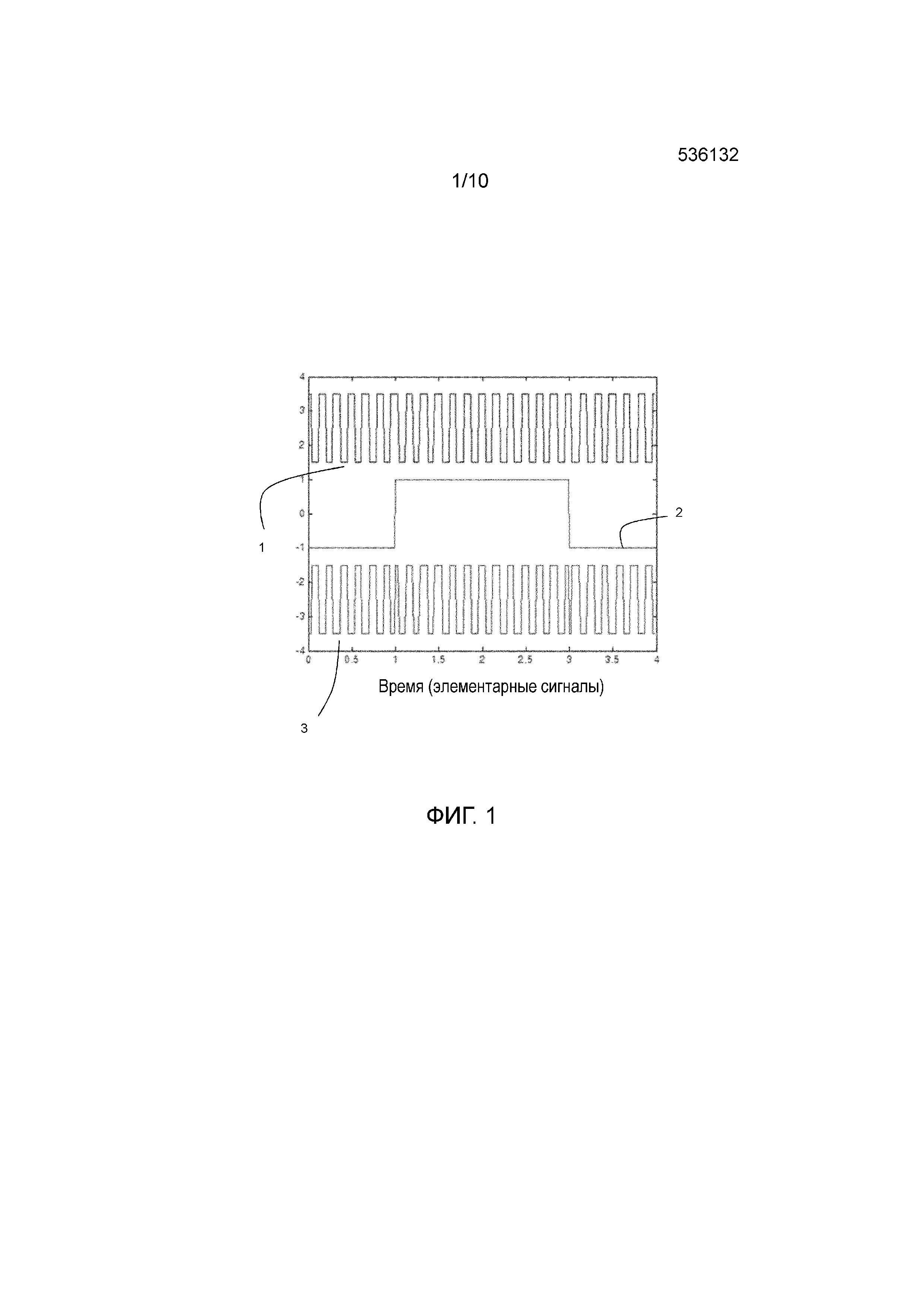
фиг. 1 - график обычного сигнала бинарной смещенной несущей и его составляющих сигналов;
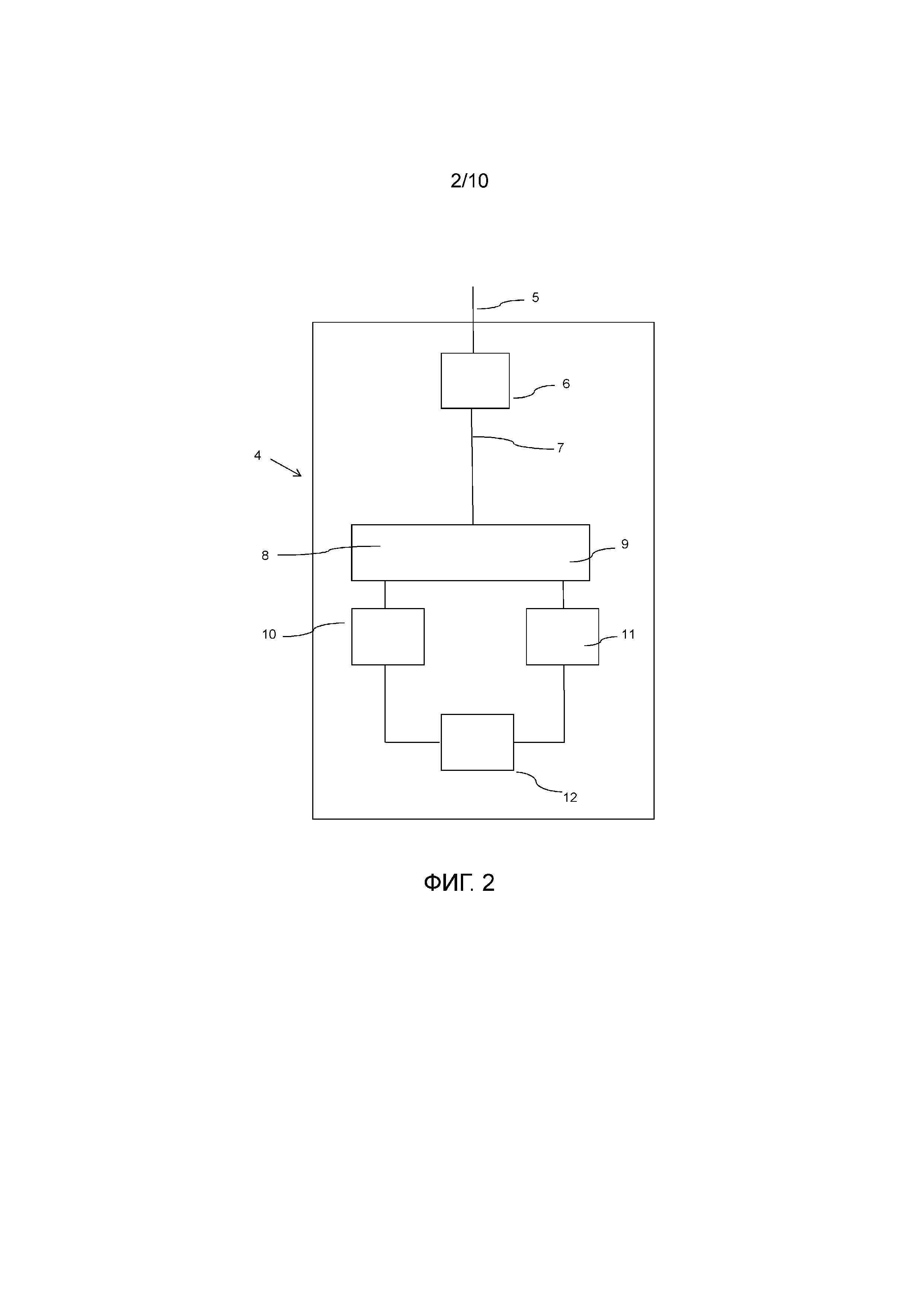
фиг. 2 - структурная схема устройства согласно изобретению;
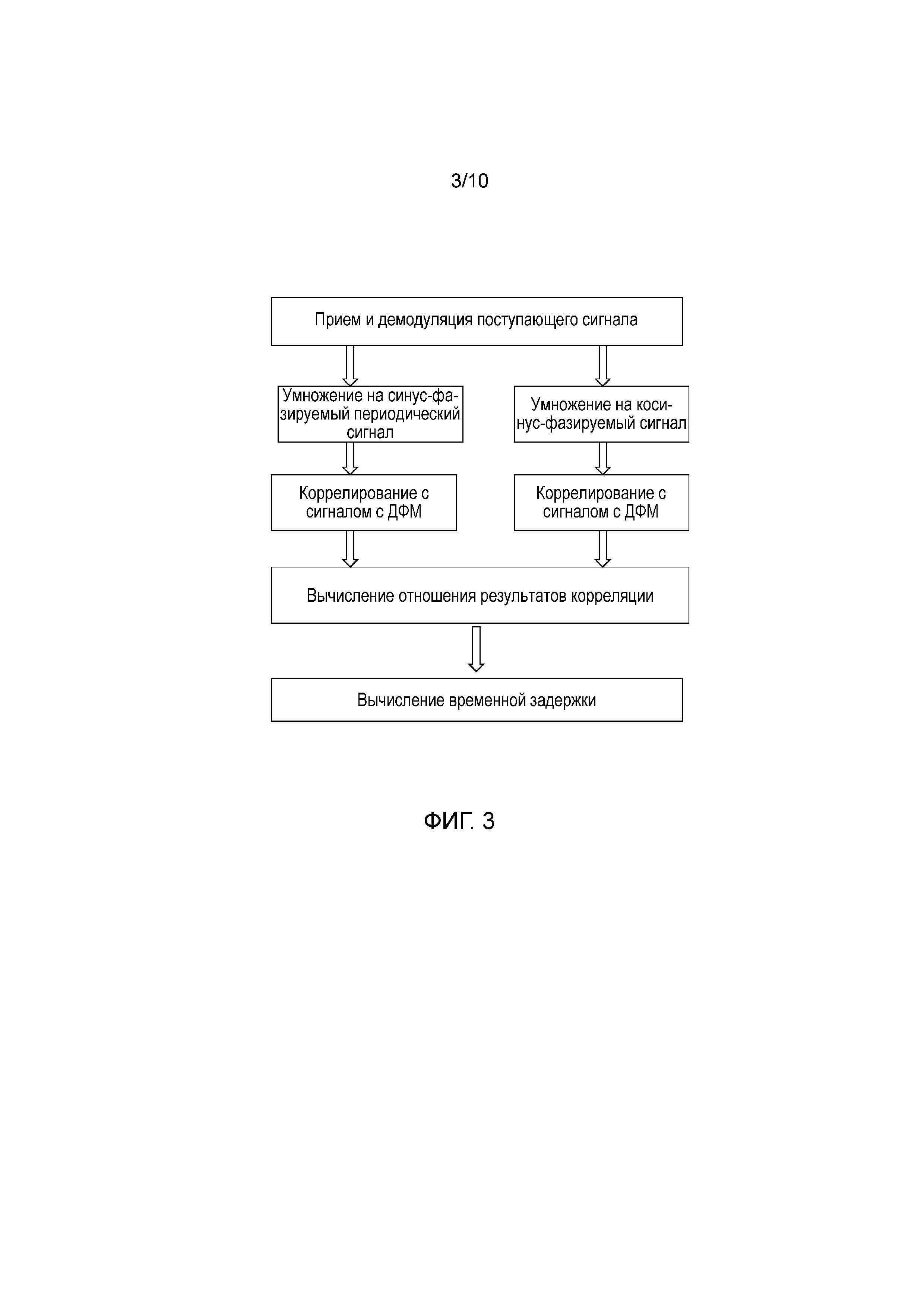
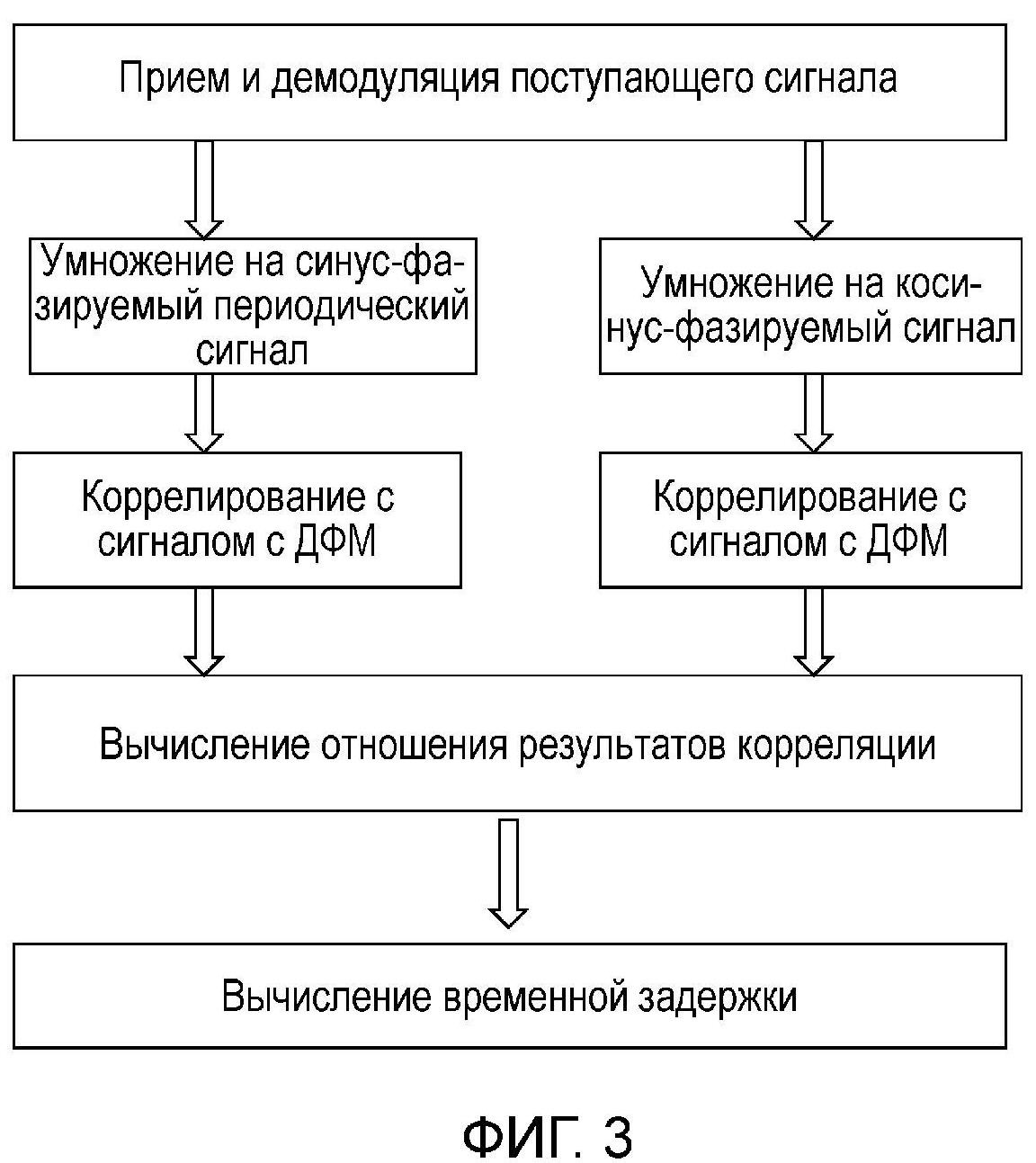
фиг. 3 - блок-схема последовательности действий способа в соответствии с этапами, выполняемыми устройством согласно изобретению;
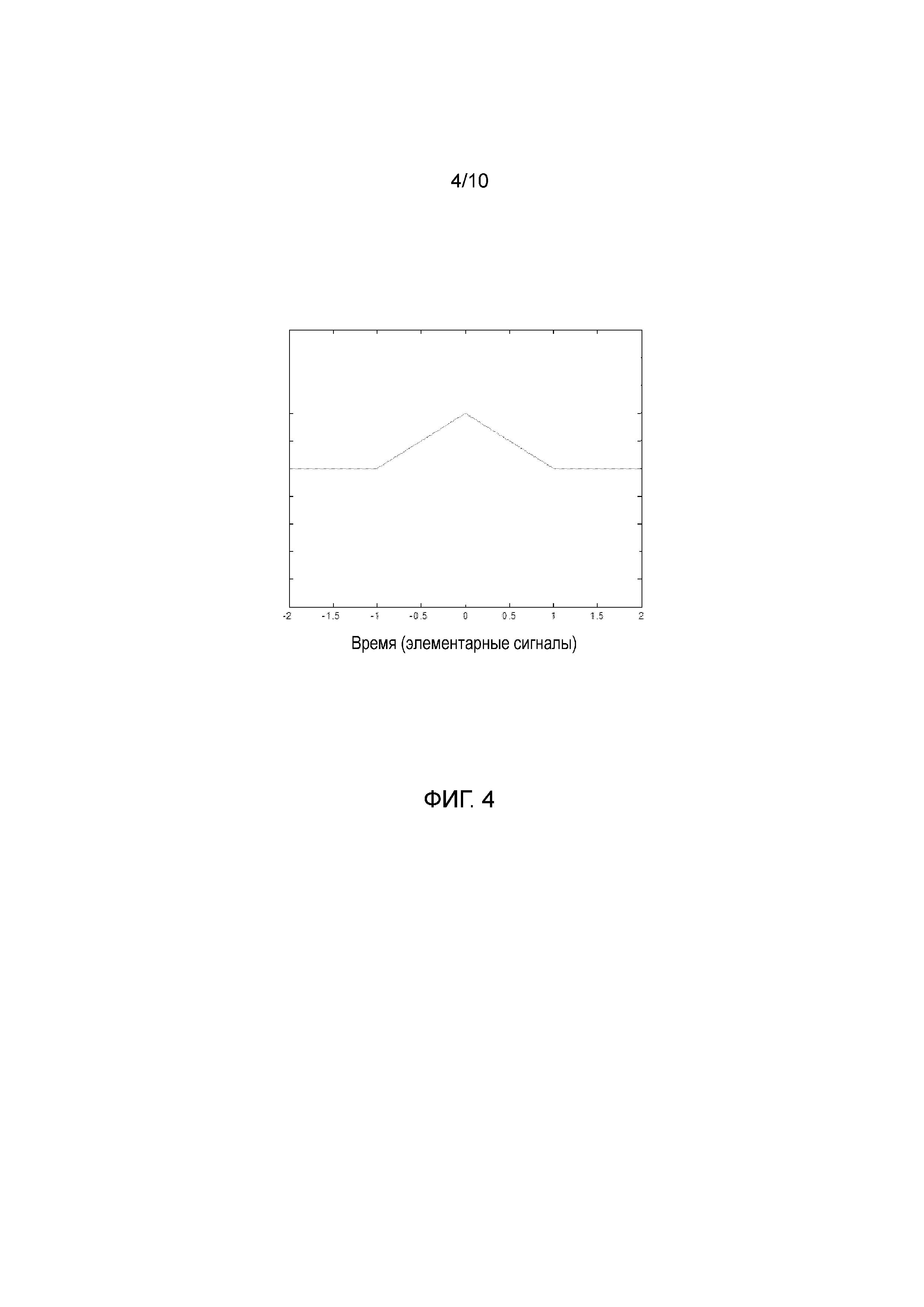
фиг. 4 - график амплитуды корреляции в зависимости от времени для обычного сигнала с двоичной фазовой манипуляцией;
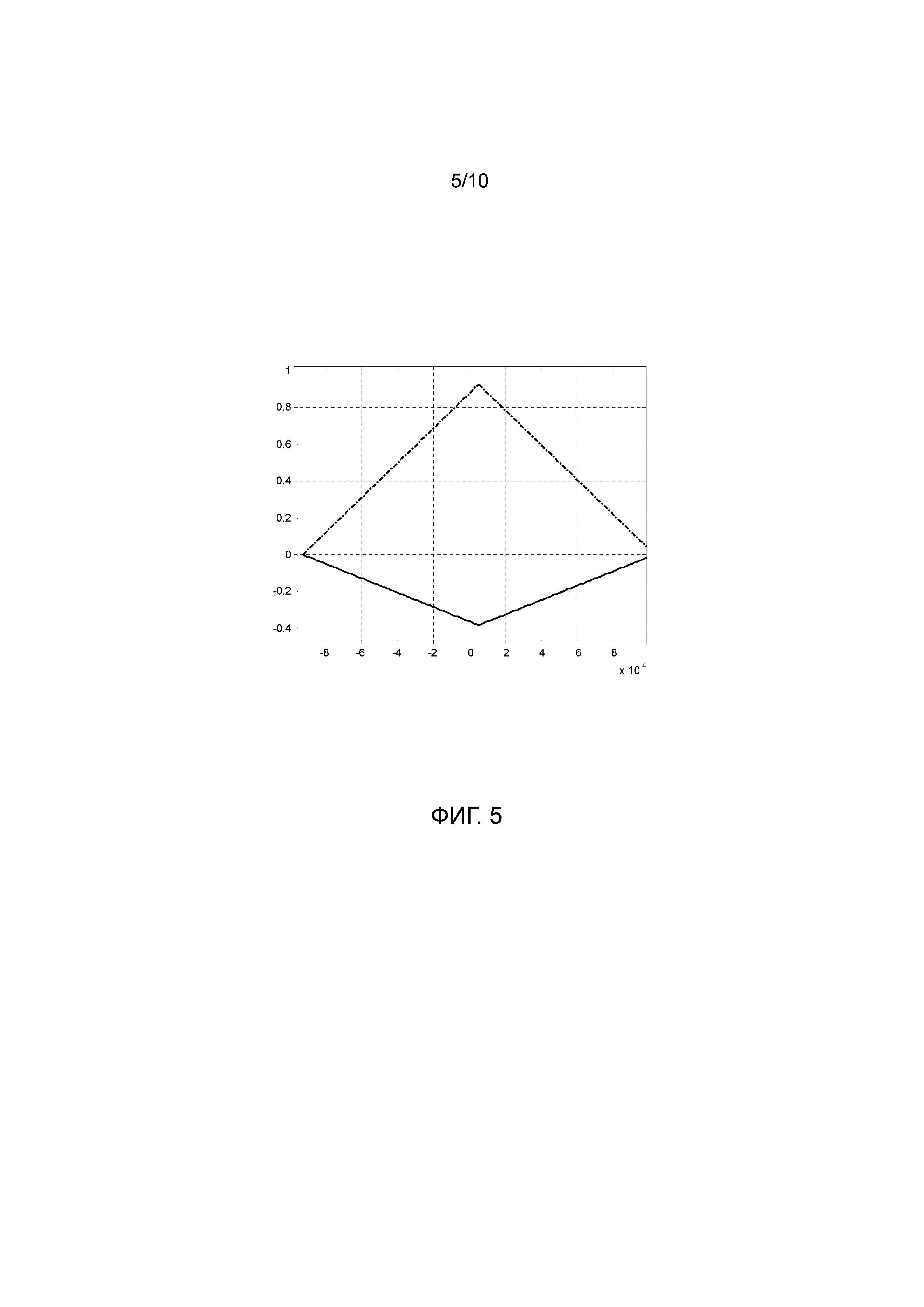
фиг. 5 - график амплитуды корреляции в зависимости от времени для поступающих сигналов, которые умножены на косинус- и синус-фазированные периодические сигналы;
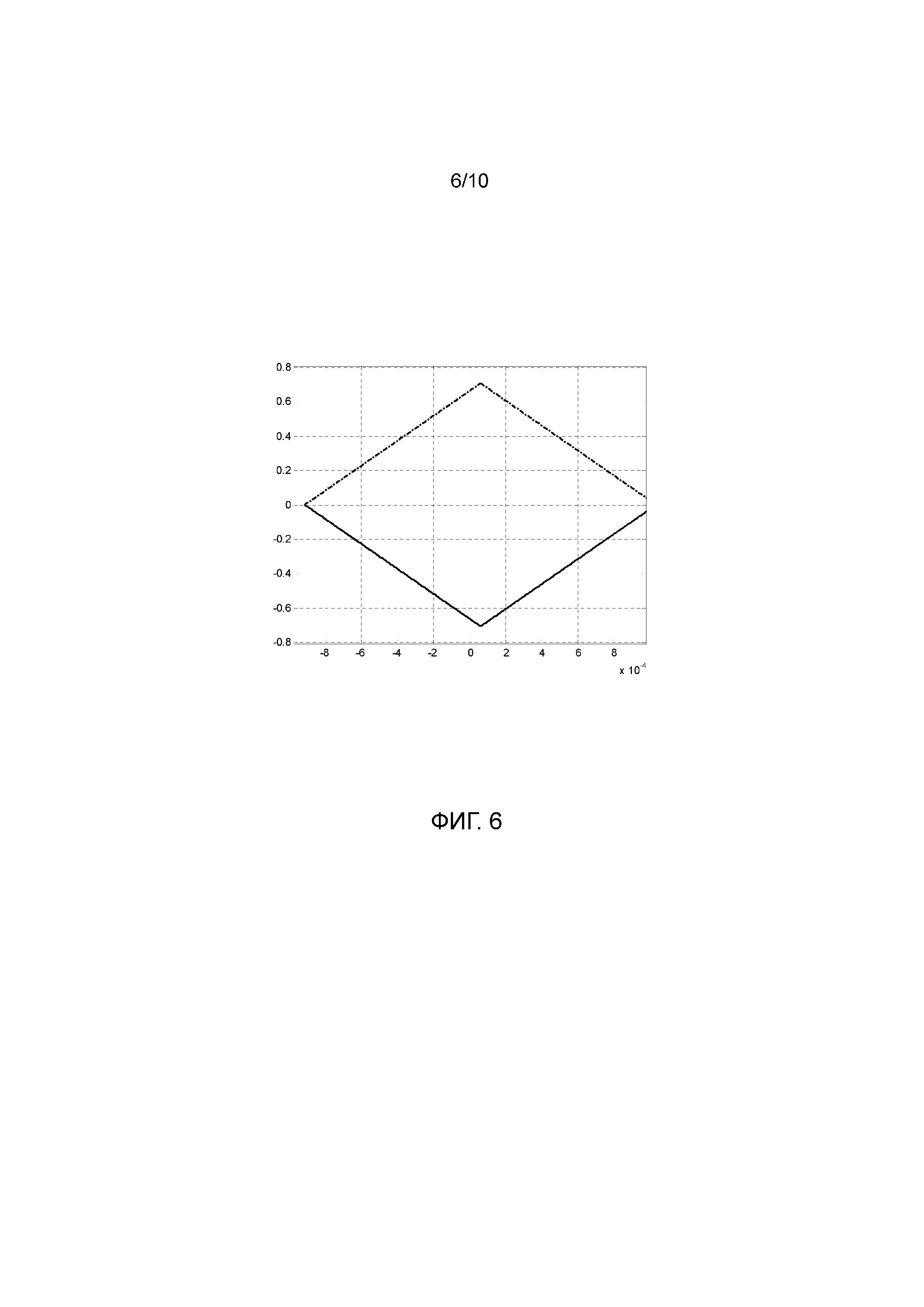
фиг. 6 - график из фиг. 5 с другой временной задержкой между поступающим сигналом и подаваемыми периодическими сигналами;
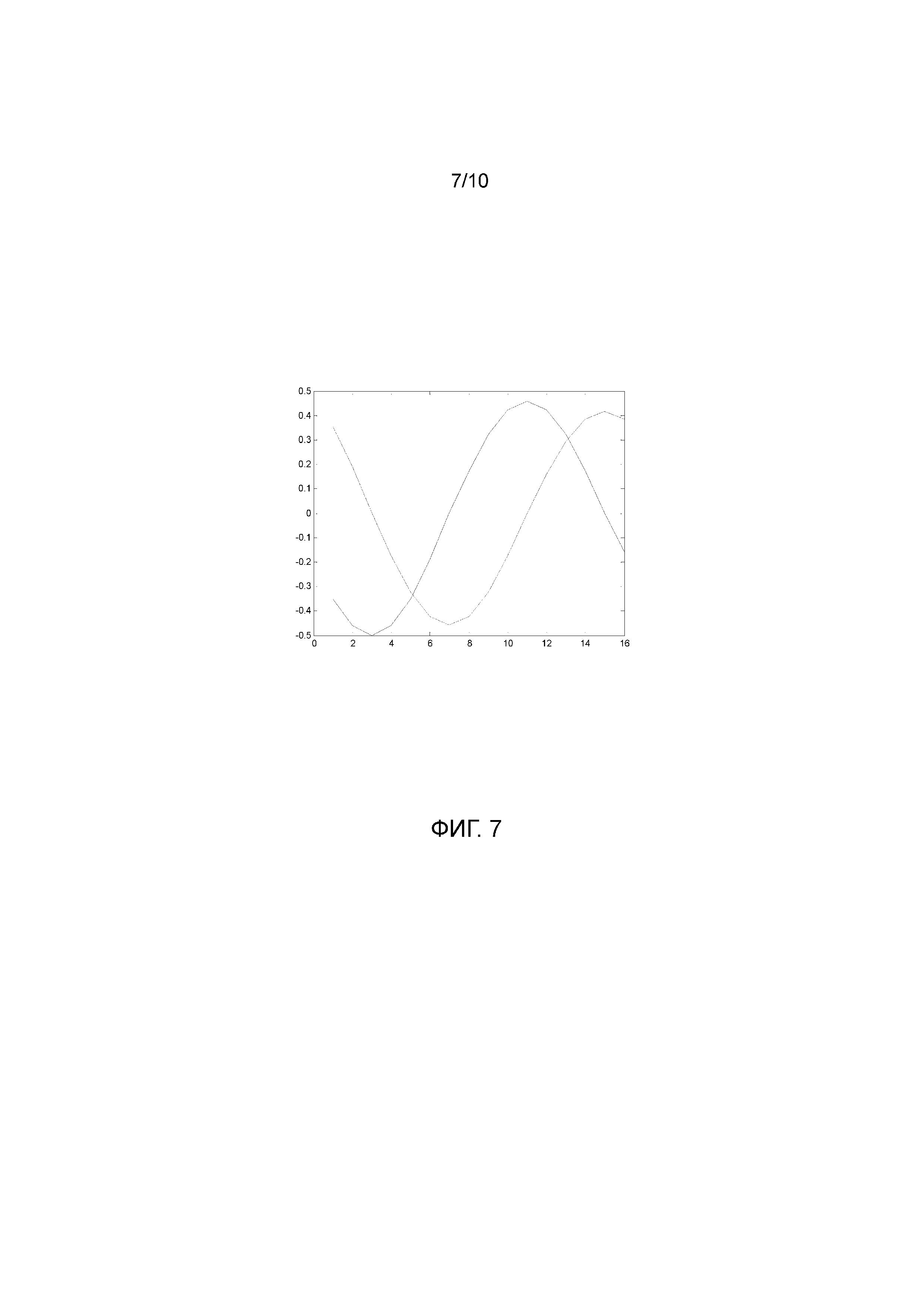
фиг. 7 - схематичный график, показывающий, каким образом амплитуда корреляции изменяется в зависимости от временной задержки между поступающим сигналом бинарной смещенной несущей и подаваемым периодическим сигналом; и
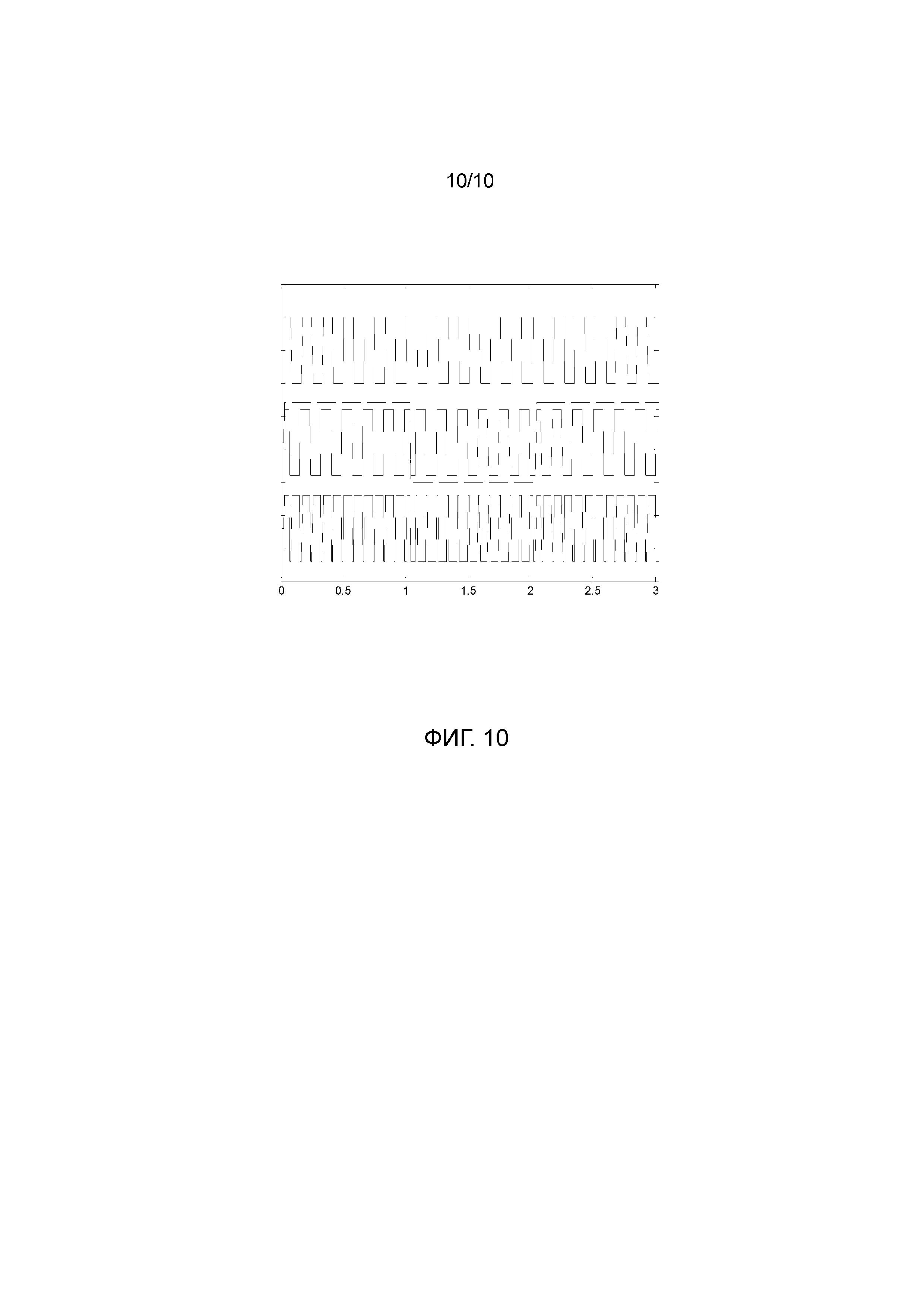
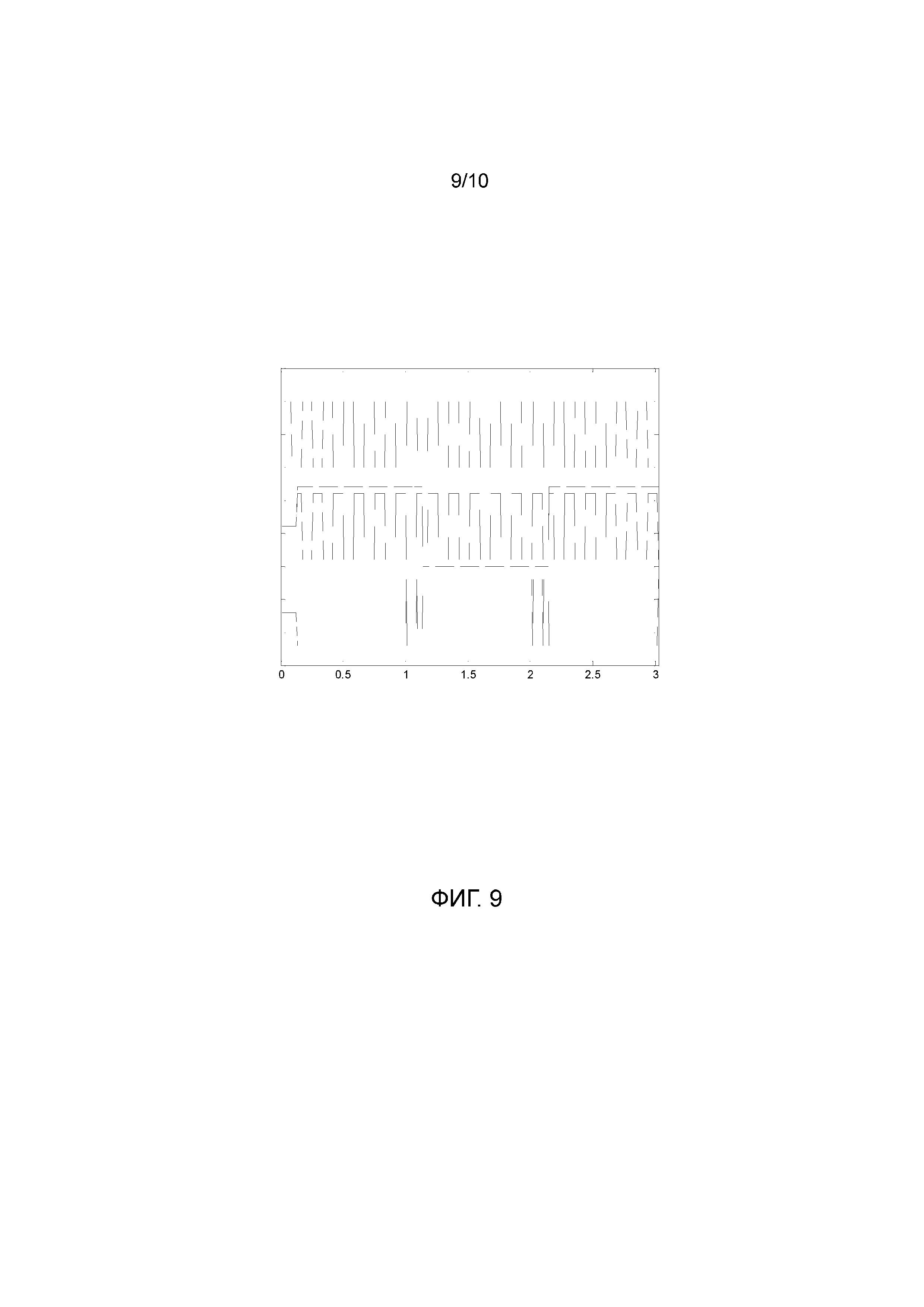
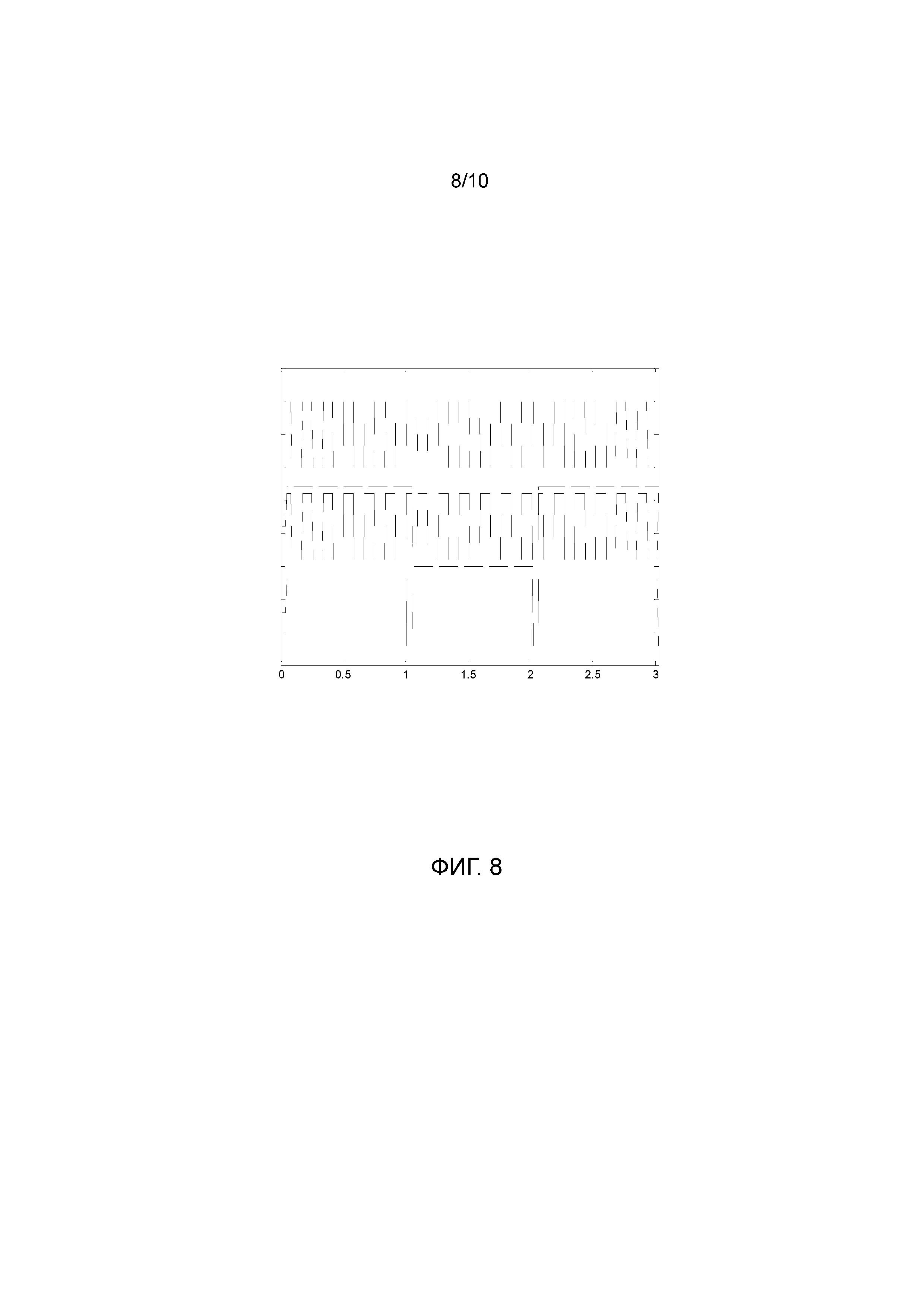
фиг. 8-10 - результаты умножения сигнала бинарной смещенной несущей с периодической функцией при трех различных временных задержках между сигналом бинарной смещенной несущей и периодической функцией.
Изобретение относится к усовершенствованиям в спутниковой системе определения местоположения типа глобальной навигационной спутниковой системы. Как отмечалось выше, в случае таких систем, как глобальная навигационная спутниковая система, требуется точное определение положения приемника на земле. Для достижения этого необходимо точно определять время прихода спутникового сигнала на приемник. Сигнал, посылаемый спутником, содержит информацию, включающую в себя время передачи сигнала со спутника. Некоторые сигналы, передаваемые спутниками, представляют собой сигналы с двоичной фазовой манипуляцией (ДФМ), в которых информация представляет собой последовательность симметричных прямоугольных импульсов (элементарных сигналов), подвергнутых двоичной фазовой манипуляции. Результирующий сигнал с двоичной фазовой манипуляцией содержит повторяющуюся картину элементарных сигналов. Участок повторяющейся картины опознается в приемнике. Этот опознаваемый участок каждой картины элементарных сигналов используется в приемнике для идентификации и отслеживания сигнала.
Другие сигналы, передаваемые спутниками, представляют собой сигналы бинарной смещенной несущей, в которых сигнал с двоичной фазовой манипуляцией до передачи умножается на сигнал поднесущей. При модуляции бинарной смещенной несущей сигнал поднесущей представляет собой по существу симметричный прямоугольный сигнал с более высокой частотой, чем частота элементарных сигналов с двоичной фазовой манипуляцией. Эта операция умножения приводит к получению сигнала бинарной смещенной несущей. Сигнал бинарной смещенной несущей используется для модуляции радиочастотного сигнала несущей. Радиочастотный сигнал передается спутником. На фиг. 1 показан обычный сигнал 3 бинарной смещенной несущей и его составляющие сигналы: поднесущая 1 и сигнал 2 с двоичной фазовой манипуляцией.
Как отмечалось выше, сигнал с двоичной фазовой манипуляцией содержит элементарные сигналы. Каждый элементарный сигнал имеет значение +1 или -1. Рассмотрим сигнал бинарной смещенной несущей, представленный на фиг. 1 нижней кривой. Сигнал бинарной смещенной несущей имеет 3 участка. На первом участке представлен сигнал поднесущей, модулированный элементарным сигналом с двоичной фазовой манипуляцией со значением -1. За ним следует второй участок, на котором представлен сигнал поднесущей, модулированный элементарным сигналом с двоичной фазовой манипуляцией со значением +1. За ним следует третий участок, на котором представлен сигнал поднесущей, модулированный элементарным сигналом с двоичной фазовой манипуляцией со значением -1.
На фиг. 2 схематично показан приемник. Приемник, показанный в целом позицией 4, принимает радиочастотный сигнал несущей с помощью антенны 5. Далее демодулятором 6 выполняется операция демодуляции, вследствие которой образуется сигнал, подобный исходному передаваемому сигналу бинарной смещенной несущей, который начиная с этого места будет называться «сигналом бинарной смещенной несущей». Умножитель 8 умножает сигнал 7 на вещественнозначную косинус-фазированную периодическую функцию, имеющую такую же частоту, как частота сигнала поднесущей, или подобную частоту, для образования первого выходного сигнала. Этот выходной сигнал будет именоваться в данной заявке косинусоидальным выходным сигналом. Одновременно умножитель 9 умножает сигнал 7 на вещественнозначную синус-фазированную периодическую функцию, имеющую такую же частоту, как частота сигнала поднесущей, или подобную частоту, для образования второго выходного сигнала. Этот выходной сигнал будет именоваться в данной заявке синусоидальным выходным сигналом. Вариация с течением времени каждого из косинусоидального и синусоидального выходных сигналов зависит от временной задержки между сигналом бинарной смещенной несущей и вещественнозначными косинус-фазированной и синус-фазированной периодическими функциями, то есть от положения во времени пиков и впадин периодической функции относительно пиков и впадин сигнала бинарной смещенной несущей. Косинусоидальный выходной сигнал подается на первый коррелятор 10. Одновременно синусоидальный выходной сигнал подается на второй коррелятор 11.
Первый и второй корреляторы 10, 11 представляют собой обычные корреляторы, то есть назначение их заключается в нахождении во времени опознаваемого участка сигнала несмотря на то, что отношение сигнала к шуму может быть низким. В каждом из первого и второго корреляторов 10, 11 исходный сигнал с двоичной фазовой манипуляцией используется в качестве опорного сигнала. В каждом из первого и второго корреляторов 10, 11 амплитуда входного сигнала измеряется на временных интервалах в продолжение одной из повторяющихся картин элементарных сигналов. На соответствующих временных интервалах каждая измеряемая амплитуда умножается на амплитуду опорного сигнала, с которым сравнивается входной сигнал. Далее результаты умножений суммируются. Величина суммы дает показатель того, насколько близко входной сигнал согласуется с опорным сигналом. Этот процесс измерения и суммирования может быть повторен относительно последующей одной из повторяющихся картин элементарных сигналов с выполнением измерений в моменты времени, которые смещены от соответствующих моментов времени, в которые выполнялся предшествующий набор измерений. Таким образом, в процессе коррелирования производится поиск на всем протяжении повторяющейся картины элементарных сигналов для опознаваемого участка.
Если результат суммирования при конкретном временном смещении имеет большее значение, чем результат суммирования при предшествующем временном смещении, то процесс перемещается ближе к опознаваемому участку. При повторениях процесса коррелирования прогрессивно большие значения для результата суммирования будут создаваться до тех пор, пока не будет достигнуто пиковое значение для результата суммирования. Достижение пикового значения означает, что суммирование выполняется при временном смещении, наиболее близком к опознаваемому участку. В случае выполнения коррелирования при еще больших временных смещениях будет создаваться более низкое значение для результата суммирования, поскольку процесс перемещается за пределы опознаваемого участка. Например, коррелирование сигнала с двоичной фазовой манипуляцией с использованием такого сигнала, как опорный сигнал в корреляторе, дает пик треугольной формы в выходном сигнале корреляции в зависимости от временной задержки, показанной на фиг. 4.
Как отмечалось выше, в настоящем изобретения сигнал бинарной смещенной несущей умножается на вещественнозначный периодический сигнал. Рассмотрим фиг. 8, на которой показаны три кривые. Верхней кривой представлен вещественнозначный периодический сигнал. Средней кривой представлен поступающий сигнал бинарной смещенной несущей из фиг. 1, то есть исходный сигнал поднесущей, умноженный на сигнал с двоичной фазовой манипуляцией. Для ясности на фиг. 8 сигнал с двоичной фазовой манипуляцией, который образует сигнал бинарной смещенной несущей, показан пунктирной линией, наложенной на сигнал бинарной смещенной несущей. Сигнал бинарной смещенной несущей имеет три различных участка. Первый участок, приблизительно между t=0 и t=1, является результатом умножения сигнала поднесущей на участок сигнала с двоичной фазовой манипуляцией, имеющего значение +1. Второй участок, приблизительно между t=1 и t=2, является результатом умножения сигнала поднесущей на участок сигнала с двоичной фазовой манипуляцией, имеющего значение -1. Третий участок, приблизительно между t=2 и t=3, является результатом умножения сигнала поднесущей на участок сигнала с двоичной фазовой манипуляцией, имеющего значение +1. Нижней кривой показан результат умножения периодического сигнала (верхней кривой) и поступающего сигнала бинарной смещенной несущей (средней кривой).
Временная задержка между периодическим сигналом и сигналом бинарной смещенной несущей является такой, что пики из первого и третьего участков сигнала бинарной смещенной несущей приблизительно совпадают по времени с пиками периодического сигнала. Кроме того, пики из второго участка сигнала бинарной смещенной несущей приблизительно совпадают по времени с впадинами периодического сигнала. Это означает, что при умножении сигнала бинарной смещенной несущей на периодический сигнал образуется нижняя кривая из фиг. 8. По форме эта нижняя кривая подобна сигналу с двоичной фазовой манипуляцией (пунктирной линии, наложенной поверх средней кривой). Когда в корреляторе сигнал с двоичной фазовой манипуляцией используется в качестве опорного сигнала, пропускание нижней кривой через коррелятор приводит к получению значительного положительного результата.
На фиг. 9 и 10 показаны 3 такие же кривые, как на фиг. 8, однако временная задержка между периодическим сигналом и поступающим сигналом бинарной смещенной несущей на фиг. 9 и 10 отличается от временной задержки на фиг. 8 и временные задержки между сигналами на фиг. 9 и 10 являются различными. На фиг. 9 временная задержка является такой, что пики из первого и третьего участков сигнала бинарной смещенной несущей приблизительно совпадают по времени с впадинами периодического сигнала. Кроме того, пики из второго участка сигнала бинарной смещенной несущей приблизительно совпадают по времени с пиками периодического сигнала. Это означает, что при умножении сигнала бинарной смещенной несущей на периодический сигнал образуется нижняя кривая из фиг. 9. Эта нижняя кривая имеет форму, приблизительно противоположную сигналу с двоичной фазовой манипуляцией (пунктирной линии, наложенной поверх средней кривой). Когда в корреляторе сигнал с двоичной фазовой манипуляцией используется в качестве опорного сигнала, пропускание нижней кривой через коррелятор приводит к получению значительного отрицательного результата.
На фиг. 10 временная задержка между периодическим сигналом и сигналом бинарной смещенной несущей является такой, что пики из первого и третьего участков сигнала бинарной смещенной несущей несколько смещены во времени от пиков периодического сигнала. Кроме того, пики из второго участка сигнала бинарной смещенной несущей несколько смещены во времени от впадин периодического сигнала. Это означает, что при умножении сигнала бинарной смещенной несущей на периодический сигнал образуется нижняя кривая из фиг. 10. Эта нижняя кривая из фиг. 10 имеет три участка. На первом участке, приблизительно между t=0 и t=1, значение +1 встречается более часто, чем значение -1. Можно сказать, что значение +1 встречается в течение Х% времени, где Х больше 50. На втором участке, приблизительно между t=1 и t=2, значение -1 встречается в течение Х% времени и поэтому более часто, чем значение +1. Третий участок имеет такую же форму, как первый участок. Когда в корреляторе сигнал с двоичной фазовой манипуляцией используется в качестве опорного сигнала, пропускание нижней кривой через коррелятор приводит к получению положительного результата. Однако величина результата меньше, чем величина результата из фиг. 8; фактически, она составляет Х% величины из фиг. 8.
Следовательно, можно видеть, что величина выходного сигнала корреляции зависит от временной задержки между сигналом бинарной смещенной несущей и периодическим сигналом. В настоящем изобретении эта зависимость используется для определения временной задержки между сигналом бинарной смещенной несущей и периодическим сигналом и следовательно, для точного определения времени прихода сигнала бинарной смещенной несущей на приемник. Пиковый выходной сигнал корреляции изменяется в зависимости от временной задержки между поступающим сигналом бинарной смещенной несущей и вещественнозначной периодической функцией.
Как отмечалось выше, в способе изобретения участок поступающего сигнала бинарной смещенной несущей умножают на косинус-фазированную периодическую функцию и тот же самый участок сигнала бинарной смещенной несущей умножают на синус-фазированную периодическую функцию. Корреляция каждого выходного сигнала будет давать иной результат. Это происходит потому, что пики и впадины синус-фазированных сигналов смещены от пиков и впадин косинус-фазированных сигналов, и поэтому две операции умножения будут приводить к различным результатам. На фиг. 5 показан выходной сигнал коррелятора для случая сигнала бинарной смещенной несущей, умноженного на косинус-фазированную периодическую функцию (нижнюю кривую), и для случая сигнала бинарной смещенной несущей, умноженного на синус-фазированную периодическую функцию (верхнюю кривую).
Оба выходных сигнала корреляторов изменяются в зависимости от временной задержки между поступающим сигналом бинарной смещенной несущей и соответствующим периодическим сигналом. Это иллюстрируется фиг. 6, на которой показаны выходные сигналы корреляторов для случая, когда сигнал приходит позже, чем на фиг. 5, на 1/16 периода поднесущей. На нижнем графике показан результат действия первого коррелятора 10 и на верхнем графике показан результат действия второго коррелятора 11. Поскольку на графиках из фиг. 5 и 6 линии показаны как прямые линии, отношение величин из верхнего и нижнего графиков не зависит от положения по горизонтальной оси. Временную задержку поступающего сигнала относительно периодических сигналов вычисляют, используя отношение величин из верхнего и нижнего графиков. Следовательно, эту временную задержку можно точно вычислять, используя синусоидальный и косинусоидальный выходные сигналы корреляции, даже если эти выходные сигналы находятся на расстоянии от пика корреляции. Это не является необходимым для точного нахождения пика корреляции.
На фиг. 7 показано, как пиковые выходные сигналы корреляции изменяются в зависимости от временной задержки между поступающим сигналом и подаваемыми периодическими сигналами. Одной из кривых показан пиковый выходной сигнал корреляции при использовании косинус-фазированной периодической функции, другой показан пиковый выходной сигнал корреляции при использовании синус-фазированной периодической функции. Как можно видеть, обе кривые имеют по существу синусоидальную зависимость от задержки. Поскольку для вещественнозначных синус- и косинус-фазированных сигналов имеется известная зависимость по отношению друг к другу, сравнение значений выходных сигналов корреляторов позволяет вычислить временную задержку. В частности, временная задержка пропорциональна арктангенсу отношения первого и второго выходных сигналов коррелятора.
Подавление помехи в приемнике
Навигация и контроль целостности
Обработка сигналов
Процессор для радиоприемника
Способ и система идентификации транспортных средств
Волокно на основе фотонного кристалла и способ его изготовления
Способ и устройство для приема сигнала
Способ и система идентификации транспортных средств
Способ и устройство для приема сигнала

