Результат интеллектуальной деятельности: НАВИГАЦИЯ И КОНТРОЛЬ ЦЕЛОСТНОСТИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству, способам, сигналам и программам для компьютера для целостности и, в частности, но не исключительно, для автономного контроля целостности в приемнике (RAIM) в системах спутниковой навигации, и к системам, включающим в себя упомянутое.
УРОВЕНЬ ТЕХНИКИ
Глобальные навигационные спутниковые системы (GNSS), такие как глобальная система позиционирования (GPS), Галилео, ГЛОНАСС, COMPASS и т. п., используют группировку спутников для обеспечения местоположений приемников. Предпочтительно, службы GNSS обеспечивают высокую доступность, точное, надежное позиционирование, навигацию и определение времени (PNT).
Службы GNSS обычно обеспечивают коммерческую "открытую" службу, общедоступную для коммерческих навигационных устройств и защищенную систему, предназначенную для использования специализированными пользователями, в частности, пользователями из правительства и вооруженных сил. В GPS эта защищенная система известна как PPS (служба точного позиционирования), а в Галилео она известна как PRS (общественно-регулируемая служба). Сигналы, обеспечиваемые этими службами, зашифрованы, и их сложнее прервать, блокировать и имитировать (или "сфабриковать").
Обычные приемники GNSS высокой производительности часто включают в себя функцию, называемую автономный контроль целостности в приемнике (RAIM), для определения целостности, которая может быть поставлена в навигационное решение для некоторого заданного периода времени (например, для фазы посадки летательного аппарата). Хотя RAIM применим для многих различных применений, его использование в критичных по безопасности и критичных по безопасности летательного аппарата применениях особенно актуально.
Как будет знакомо специалисту, RAIM ссылается на некоторое количество известных методик. Одна такая методика содержит проверку непротиворечивости, в которой все решения позиций, полученные посредством поднаборов обнаруженных спутниковых сигналов, сравниваются друг с другом. В практических вариантах осуществления, если эта проверка указывает, что местоположения не непротиворечивы, приемник может быть выполнен с возможностью обеспечения тревоги пользователю.
В дополнительном примере, методики RAIM могут, в качестве альтернативы или дополнения, обеспечивать обнаружение и исключение неисправности (FDE). Для того чтобы найти местоположение приемника, приемник сначала вычисляет "псевдодальность" для каждого принятого сигнала, который представляется как исходящий от спутника. Псевдодальность вычисляется на основе времени пролета сигнала (т. е. разницы между временем, в которое сигнал был послан, которое понятно из содержимого сигнала, и временем, в которое он принимается, согласно таймеру приемника). Результаты от каждого сигнала сравниваются, и измерения дальности, которые формируют посторонние значения для набора псевдодальностей, могут быть исключены. Такие методики могут обнаруживать возможно неисправный (или фальсифицированный) спутник или сигнал и дополнительно служат для исключения его из расчетов, обеспечивая возможность навигационной службе продолжать работу. Таким образом, RAIM обеспечивает увеличенную достоверность того, что окончательный результат навигации верен.
Доступность может быть ограничивающим фактором для RAIM, который требует того, чтобы больше спутников были видны приемнику, чем для базовой навигационной службы. Для получения решения 3D-местоположения по меньшей мере четыре измерения требуется, но обнаружение неисправности требует по меньшей мере 5 измерений, и изоляция и исключение неисправности требуют по меньшей мере 6 измерений (и на практике больше измерений желательно). Таким образом, хотя он изначально предусмотрен как используемый внутри одной группировки, RAIM был расширен для использования сигналов открытой службы от многих группировок.
ЗАДАЧАИЗОБРЕТЕНИЯ
Изобретение призвано обеспечить улучшенный способ и устройство для контроля целостности, в частности для автономного контроля целостности в приемнике (RAIM) в системах спутниковой навигации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно одному аспекту настоящего изобретения, обеспечен способ для взвешивания сигнала для систем спутниковой навигации, причем способ содержит этапы, на которых (i) принимают защищенный и открытый служебные сигналы от по меньшей мере одной системы спутниковой навигации, (ii) для принятых сигналов определяют псевдодальность, и (iii) ассоциируют статистический вес с каждой псевдодальностью, причем упомянутое взвешивание содержит учет того, является ли сигнал открытым сигналом или защищенным сигналом.
Это имеет преимущества, поскольку это обеспечивает возможность использования и защищенных, и открытых сигналов в выполнении моделирования целостности (в частности, функций автономного контроля целостности в приемнике (RAIM)), в то время как только одна из этих служб была использована данной системой в прошлом. В частности, когда приемники имели доступ к защищенным сигналам, они были предпочтительны, поскольку их сложнее имитировать и блокировать (и они были в прошлом более точными).
Вследствие этого аспекта, использование и защищенных, и открытых сигналов выгодно обеспечивает больше информации для информирования решения о целостности. Кроме того, наличие возможности применения весов к сигналам на основе категории службы имеет преимущества, поскольку оно обеспечивает возможность характерной более высокой целостности защищенных сигналов (которые имеют проектные признаки против фабрикации и против искажения ложными помехами) отражаться в вычислениях RAIM. Предпочтительно, таким образом, при отсутствии других факторов, веса, применяемые к защищенной системе, больше, чем применяемые к открытому сигналу.
Согласно второму аспекту настоящего изобретения, обеспечен способ для взвешивания сигнала для систем спутниковой навигации, причем способ содержит этапы, на которых (i) принимают сигналы от по меньшей мере одной системы спутниковой навигации, (ii) для принятых сигналов определяют псевдодальность, и (iii) ассоциируют статистический вес с каждой псевдодальностью, причем упомянутый вес содержит учет относительной надежности источника принятых сигналов.
Это имеет преимущества, поскольку это обеспечивает возможность выполнения способа, в котором степень доверия, которую пользователь имеет к конкретному источнику, используется при выполнении моделирования целостности.
Сигналы могут быть открытыми служебными сигналами. Способ может дополнительно содержать назначение коэффициента надежности сигналам, исходящим от различных источников, причем коэффициент надежности является мерой надежности сигнала, исходящего от одного источника, по отношению к надежности сигнала, исходящего от одного или нескольких других источников. Статистический вес, применяемый к сигналам от конкретного источника, может быть пропорционален коэффициенту надежности, назначенному сигналам от этого источника.
Следующие признаки применимы к обоим из первого и второго аспектов изобретения. Другие факторы могут также быть использованы при взвешивании. Такие факторы могут включать в себя группировку, которой принадлежит спутник, где вес определяется согласно предварительно определенным правилам. Например, один объект может предпочитать сначала использовать свою собственную спутниковую систему, если она доступна, но доверять сигналам от группировки спутников союзника почти настолько же, в то время как сигналы, полученные от группировки спутников, обеспеченной недоверенным объектом или государством, могут быть наделены низким или нулевым весом.
Дополнительным фактором может быть качество сигнала. С этой целью способ может содержать этап анализа принятых сигналов для определения качества сигнала, и применяемый вес может учитывать качество сигнала. В таких примерах сигналы более высокого качества будут иметь тенденцию увеличить вес, применяемый к информации, полученной из этого сигнала.
Дополнительным фактором могут быть помехи сигналов. С этой целью способ может содержать этап характеризации принятых сигналов для определения уровня помех сигналов, и применяемый вес может учитывать измеренное отношение сигнала к шуму. В таких примерах более низкие уровни помех будут иметь тенденцию увеличить вес, применяемый к информации, полученной из этого сигнала.
Дополнительный фактор может возникать в результате проверки аутентификации для определения, соответствует ли сигнал ожидаемым нормам. С этой целью способ может содержать этап аутентификации принятых сигналов для определения достоверности, с которой может быть определено, что сигнал прибыл от ожидаемого источника (такого как направление прибытия, если это может быть получено из системы приемной антенны), и применяемый вес может учитывать уровень достоверности. В таких примерах более высокие уровни достоверности будут иметь тенденцию увеличивать вес, применяемый к информации, полученной из этого сигнала.
Все эти факторы обеспечивают возможность способу способствовать интеллектуальному уменьшению взвешенной доли измерений низкой доверенности в решении о целостности.
Способ может содержать способ навигации, и взвешивания могут быть использованы для определения веса, назначаемого определенному измерению псевдодальности в определении решения местоположения. Это имеет преимущества, поскольку это означает, что определенное измерение местоположения будет в общем случае предпочитать доверенные (и, возможно, согласно применяемым факторам, более качественные) сигналы.
Способ может содержать способ контроля целостности и, в частности, автономного контроля целостности в приемнике (RAIM). Взвешивания могут быть использованы для определения веса, назначаемого определенному измерению псевдодальности, используемому в процессах RAIM. Как будет понятно специалисту, в RAIM одна или несколько долей, которые не согласуются с другими измерениями, могут поднимать тревогу для пользователя, указывая потенциальные ошибки, фабрикацию, помехи или неисправности с этим источником данных навигации, или, в качестве альтернативы или дополнения, сигнал, обеспечивающий такие противоречивые измерения, может быть исключен, в частности из функций навигации.
В таких примерах все отдельные сигналы могут быть взвешены, и RAIM может быть осуществлен над всеми сигналами вместе, но это не обязательно должно быть так во всех вариантах осуществления. Например, первый этап процесса RAIM может осуществляться над защищенными сигналами для определения, с высокой степенью достоверности, каким сигналам следует доверять. Это определение может затем быть дополнено вторым процессом RAIM, который использует открытый служебный сигнал, но применяет к нему более низкий вес. Это ограничивает количество сигналов, учитываемых в некотором заданном вычислении RAIM, что может иметь преимущества в некоторых вариантах осуществления.
В способах моделирования целостности или навигации сигналы ниже порогового веса могут быть исключены, или в ином случае предварительно определенное желаемое количество сигналов может быть обеспечено, и только сигналы с наивысшим весом могут быть использованы. Однако, поскольку взвешивание будет характерно предпочитать доверенные/хорошие сигналы, это не обязательно должно быть так, и все сигналы могут быть использованы.
Согласно третьему аспекту изобретения обеспечен блок обработки, выполненный с возможностью приема защищенных и открытых RF-сигналов (радиосигналов) и содержащий аналого-цифровой преобразователь, выполненный с возможностью преобразования RF-сигналов в цифровые сигналы, модуль получения, выполненный с возможностью выполнения получения сигналов, и модуль взвешивания, выполненный с возможностью применения статистического веса к принятым сигналам, причем упомянутый вес содержит учет того, является ли сигнал открытым сигналом или защищенным сигналом.
Предпочтительно, блок обработки выполнен с возможностью осуществления способа первого аспекта изобретения.
Блок обработки может дополнительно содержать по меньшей мере по одному экземпляру каждого средства из следующих:
(i) криптографический модуль, выполненный с возможностью поддержки получения принятых защищенных сигналов;
(ii) модуль охарактеризования или измерения, выполненный с возможностью определения интенсивности и качества сигнала;
(iii) модуль аутентификации, выполненный с возможностью проверки допустимости источника сигнала;
(iv) модуль RAIM, выполненный с возможностью осуществления функций RAIM;
(v) модуль навигации, выполненный с возможностью определения данных местоположения, навигации и времени из принятых сигналов.
Блок обработки может содержать блок приемника GNSS.
Согласно четвертому аспекту изобретения обеспечен блок обработки, выполненный с возможностью приема открытых RF-сигналов и содержащий аналого-цифровой преобразователь, выполненный с возможностью преобразования RF-сигналов в цифровые сигналы, модуль получения, выполненный с возможностью выполнения получения сигналов, и модуль взвешивания, выполненный с возможностью применения статистического веса к принятым сигналам, причем упомянутый вес содержит учет надежности источника принятых сигналов по отношению к одному или нескольким другим источникам.
Предпочтительные признаки могут быть скомбинированы надлежащим образом, как будет понятно специалисту, и могут быть скомбинированы с любым из аспектов изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения далее будут описаны исключительно в качестве примера и со ссылками на сопроводительные чертежи, на которых:
фиг. 1 изображает систему GNSS, содержащую группировку спутников и блок приемника;
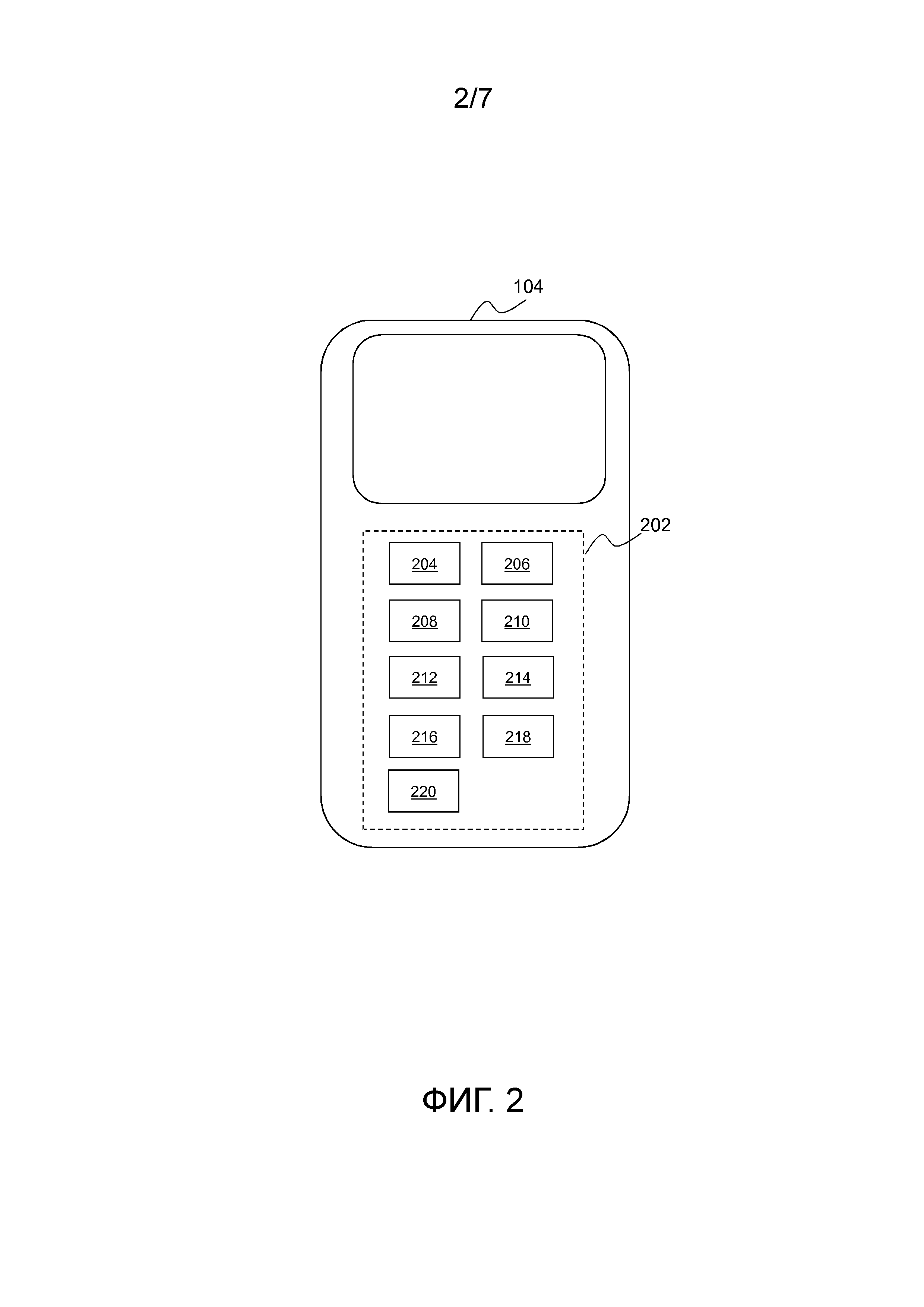
фиг. 2 схематически изображает компоненты блока приемника;
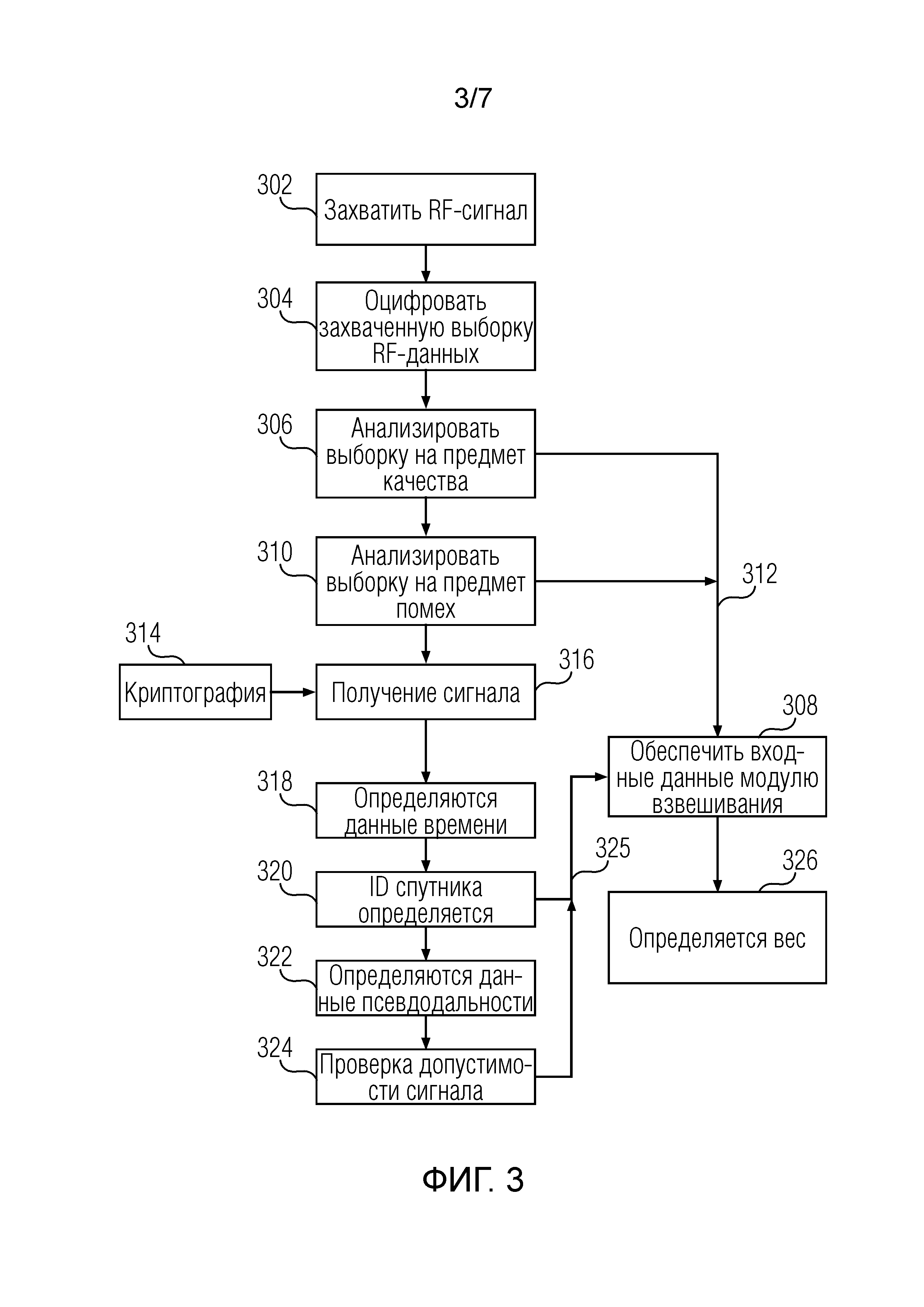
фиг. 3 изображает процесс согласно варианту осуществления изобретения;
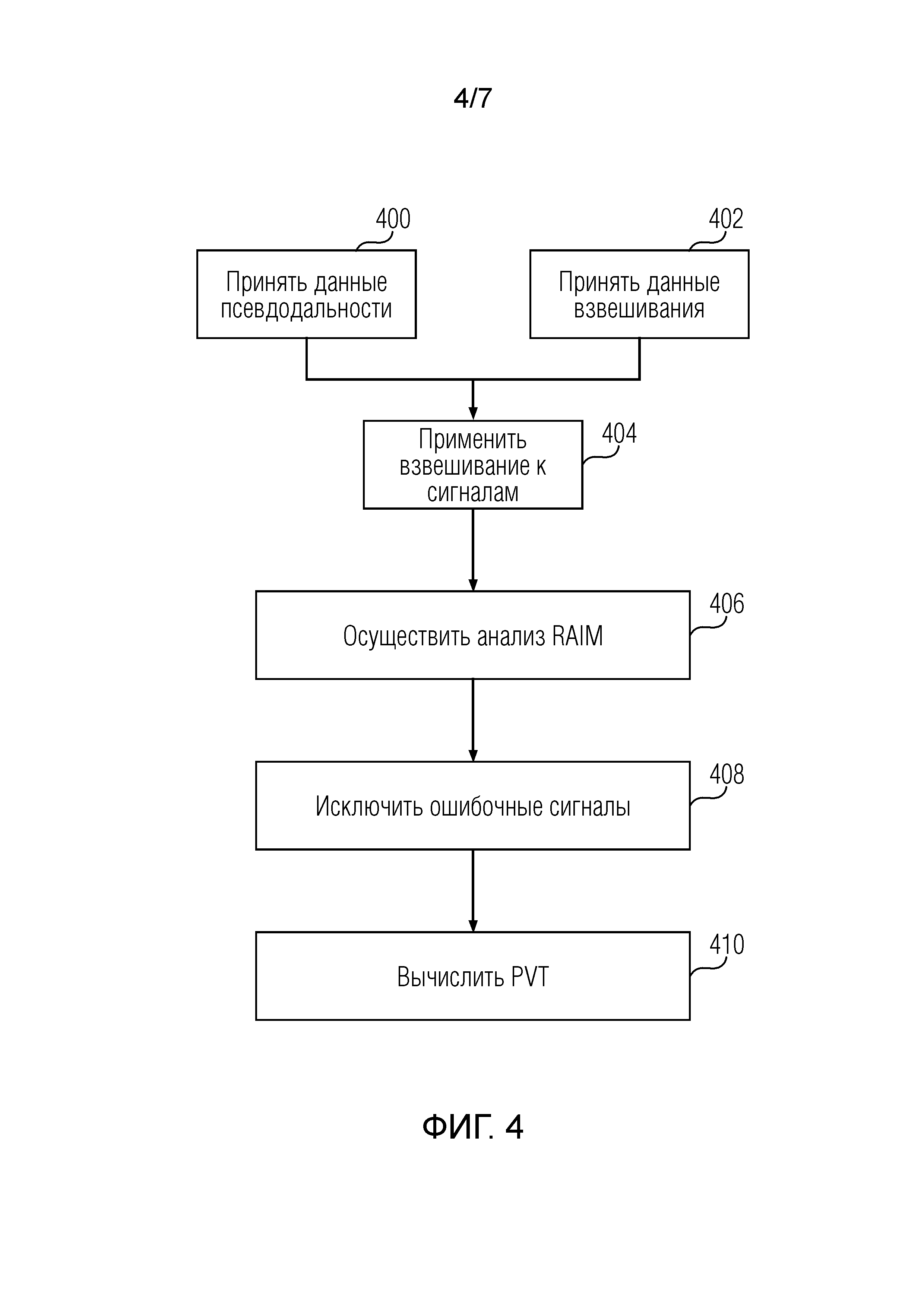
фиг. 4 изображает другой процесс согласно варианту осуществления изобретения;
фиг. 5 дополнительно изображает процесс альтернативного варианта осуществления согласно аспекту изобретения;
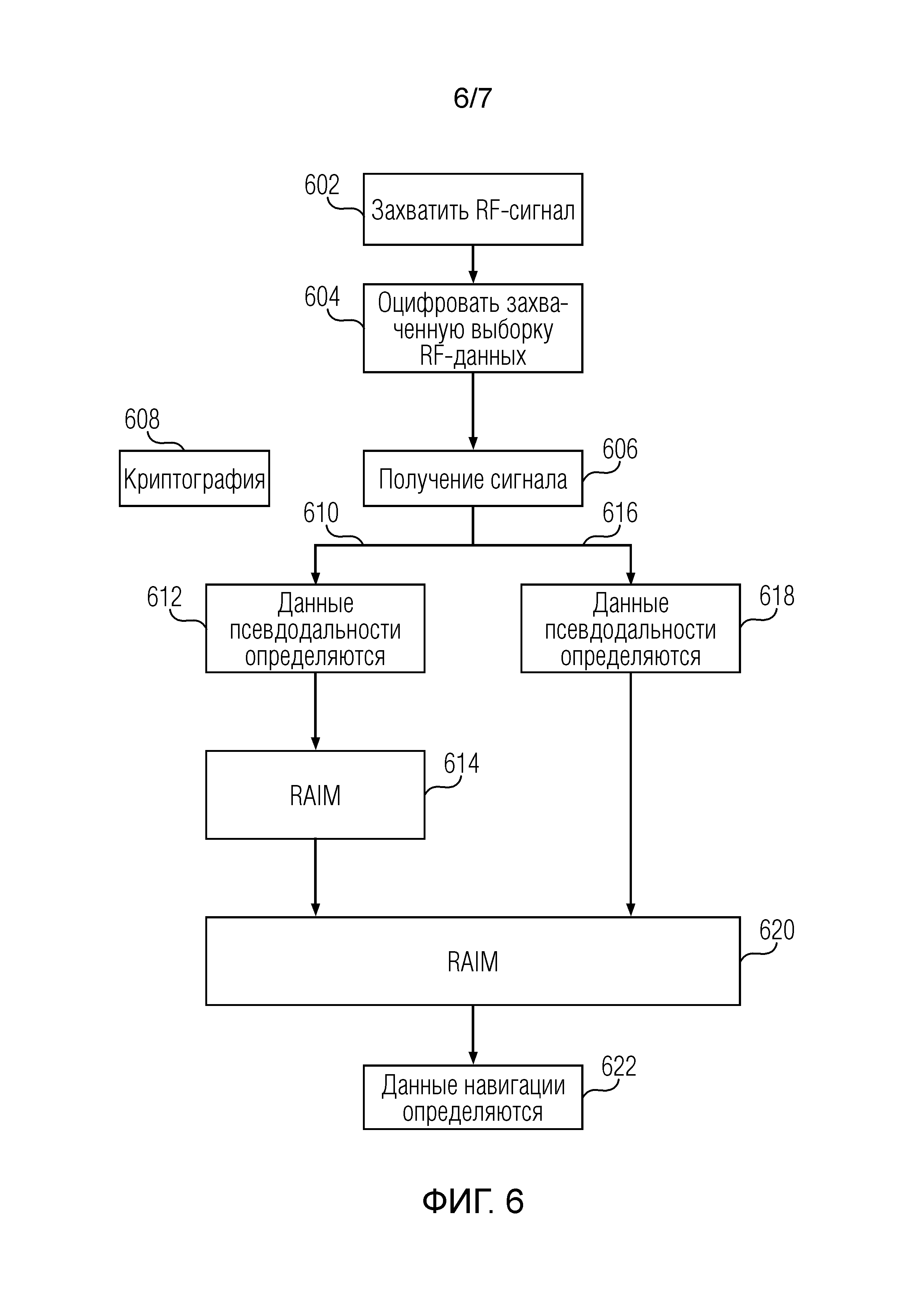
фиг. 6 изображает блок-схему, показывающую подробные этапы обработки согласно варианту осуществления изобретения; и
фиг. 7 изображает ступенчатый процесс согласно варианту осуществления изобретения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
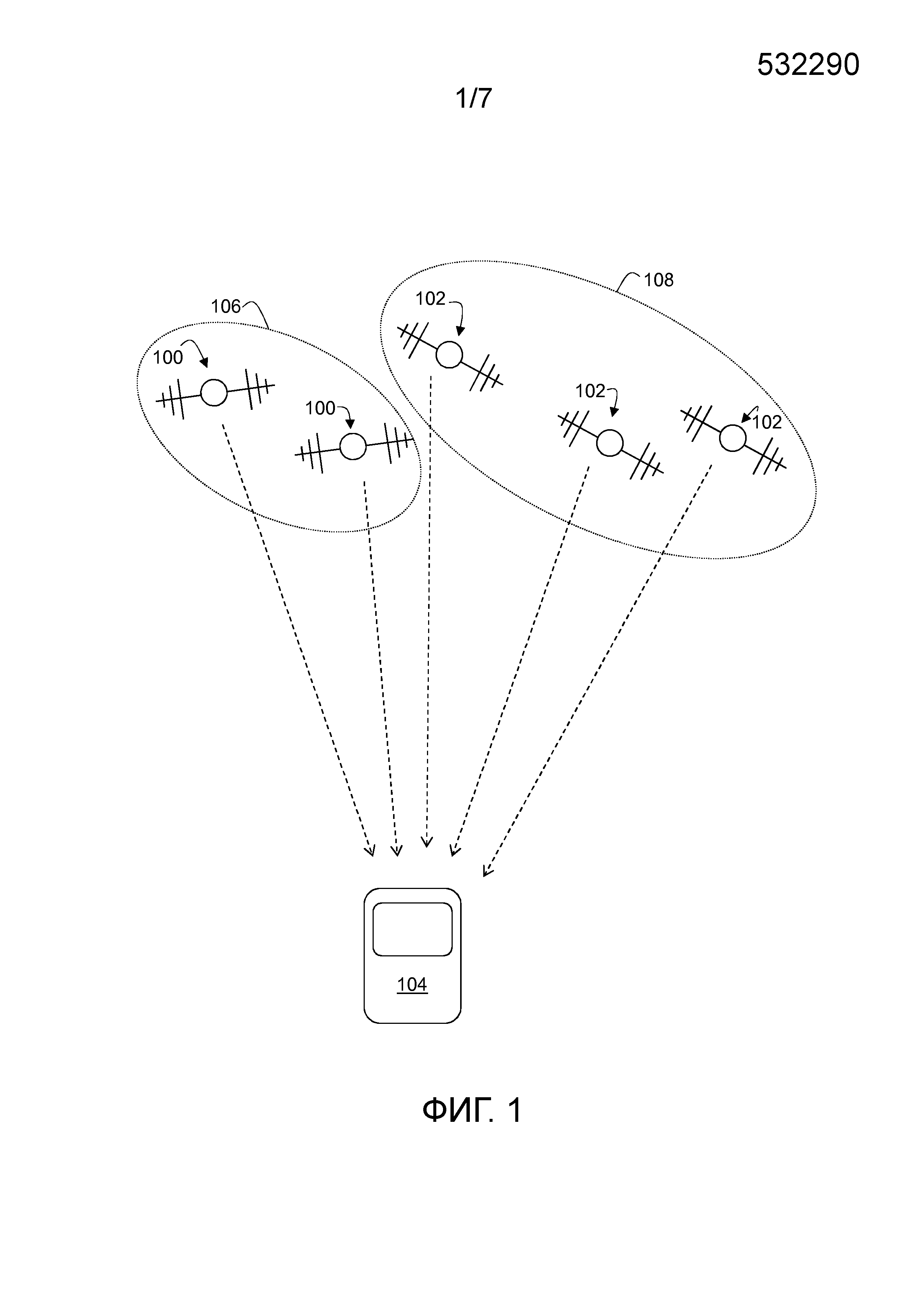
Фиг. 1 изображает некоторое количество спутников 100, 102, которые излучают радиочастотные (RF) сигналы, которые захватываются в блоке 104 приемника. Блок 104 приемника может быть карманным устройством, установленным на площадке, или может быть монтирован на транспортном средстве. В конкретном практическом варианте осуществления, поскольку способы, описанные здесь, обеспечивают данные местоположения, скорости и времени (PVT) высокой целостности, блок 104 приемника может находиться в воздушном судне и быть использован в течение критичной по безопасности операции, как, например, в течение взлета и посадки.
В этом примере спутники 100, 102 формируют часть первой 106 и второй 108 группировки GNSS, и каждый спутник излучает как защищенный так и открытый служебные сигналы (таким образом, в практическом примере группировки 106, 108 могут быть GPS и Галилео, и каждый спутник передает сигнал PPS/PRS и открытый сигнал).
Компоненты блока 104 приемника показаны более подробно на фиг. 2. Блок 104 приемника содержит цепи 202 обработки, причем цепи 202 обработки содержат: аналого-цифровой преобразователь 204, который преобразует RF-сигналы, принятые от спутников 100, 102, в цифровые сигналы; модуль 206 анализа, который просматривает интенсивность и качество сигнала, средство 208 отслеживания помех, выполненное с возможностью доступа к уровню помех в сигнале, криптографический модуль 210, выполненный с возможностью поддержки получения и дешифрования принимаемых защищенных сигналов, модуль 212 получения, выполненный с возможностью выполнения "получения" спутникового сигнала, модуль 214 аутентификации, выполненный с возможностью проверять допустимость источника сигнала, модуль 216 взвешивания, выполненный с возможностью применения веса к принятым сигналам, модуль 218 RAIM, выполненный с возможностью осуществления функций RAIM, и модуль 220 навигации, выполненный с возможностью определения информации местоположения, навигации и времени приемника из принятых сигналов. Функция этих модулей будет здесь подробно раскрыта ниже.
Разумеется, специалист поймет, что компоненты, описанные выше, не обязательно должны быть отдельными физическими компонентами и могут быть обеспечены программными средствами, аппаратными средствами, программно-аппаратными средствами или подобным. Действительно, блок 104 приемника может содержать альтернативные, дополнительные компоненты или меньшее их количество, и функции, очерченные выше, могут быть разделены между более чем одним устройством. В частности, может быть устройство, специализированное для приема сигналов от конкретной группировки GNSS, и/или может быть устройство, специализированное для приема защищенных сигналов.
В одном варианте осуществления изобретения блок 104 приемника осуществляет способ, как описано со ссылками на блок-схему с фиг. 3. Сначала на этапе 302 блок 104 приемника принимает некоторое количество спутниковых сигналов. На этапе 304 эти сигналы преобразуются в цифровой сигнал аналого-цифровым преобразователем 204. Далее, на этапе 306 сигналы характеризуются модулем 206 анализа, который просматривает интенсивность и качество сигнала, обеспечивая выходные данные через ветвь 312 к модулю 216 взвешивания (этап 308), и сигнал затем просматривается на этапе 310 средством 208 отслеживания помех, которое также обеспечивает выходные данные через ветвь 312 модулю 216 взвешивания, указывая на уровень помех (этап 308).
Получение (этап 316) выполняется над зашифрованным сигналом или открытым служебным сигналом модулем 212 получения, что, как будет знакомо специалисту, в контексте GNSS означает процесс сравнения принятого сигнала с локально испускаемым или генерируемым дубликатом спутникового сигнала для поиска соответствия, которое для защищенных сигналов будет поддерживаться криптографическим модулем 210 на этапе 314.
Целью получения является обнаружение данных времени (этап 318), но оно также приводит в результате, на этапе 320, к определению спутника. В самой своей основе получение требует корреляции между принятым сигналом и сигналами-кандидатами. Когда корреляция превосходит пороговое значение, объявляется соответствие.
"Псевдодальность" (т. е. расстояние от блока 104 приемника до предполагаемого источника) также определяется модулем получения (этап 322). В этом примере ID спутника передается через ветвь 325 модулю 216 взвешивания, и псевдодальность передается модулю 218 RAIM, где она используется, как описано в отношении фиг. 4.
На этапе 324 модуль 212 аутентификации затем задействуется для определения допустимости сигнала, то есть того, соответствует ли сигнал ожидаемым нормам, например направлению прибытия по отношению к антенне. Для достижения этого модуль аутентификации может требовать больше информации от активной системы антенны, чем обычно требуется для простого получения. Это генерирует уровень достоверности, который снова передается модулю 216 взвешивания.
На этапе 326 модуль 216 взвешивания использует входные данные для применения веса к данным псевдодальности перед тем, как данные используются модулем 218 RAIM. Вес может принимать в расчет следующее:
- Группировку, которой принадлежит спутник, как определено из ID спутника, причем вес определяется согласно предварительно определенным правилам.
- Выходные данные из модуля характеризации, где сигнал более высокого качества и интенсивности наделяется более высоким весом.
- Уровень помех (более высокие помехи приводят к более низкому весу).
- Уровень достоверности, генерируемый модулем аутентификации, где более низкая достоверность приводит к более низкому весу.
- То, является ли сигнал защищенным сигналом или открытым сигналом, где более высокий вес назначается защищенному сигналу.
Разумеется, не все из этих критериев могут быть использованы во всех вариантах осуществления, и дополнительные критерии могут быть использованы в других вариантах осуществления.
Со ссылками на фиг. 3 специалисты в данной области техники поймут, что анализ на качество (этап 306) и/или помехам (этап 308) может опционально осуществляться после получения сигнала (этап 316), а не перед получением сигнала (этап 316), как показано на чертеже. В таких случаях данные из этапов анализа будут затем обеспечены модулю 216 взвешивания на этапе 308 через ветвь 325, например. Специалисты в данной области техники поймут также то, что в зависимости от применения и задействуемых аппаратных ресурсов некоторые этапы могут осуществляться параллельно или одновременно.
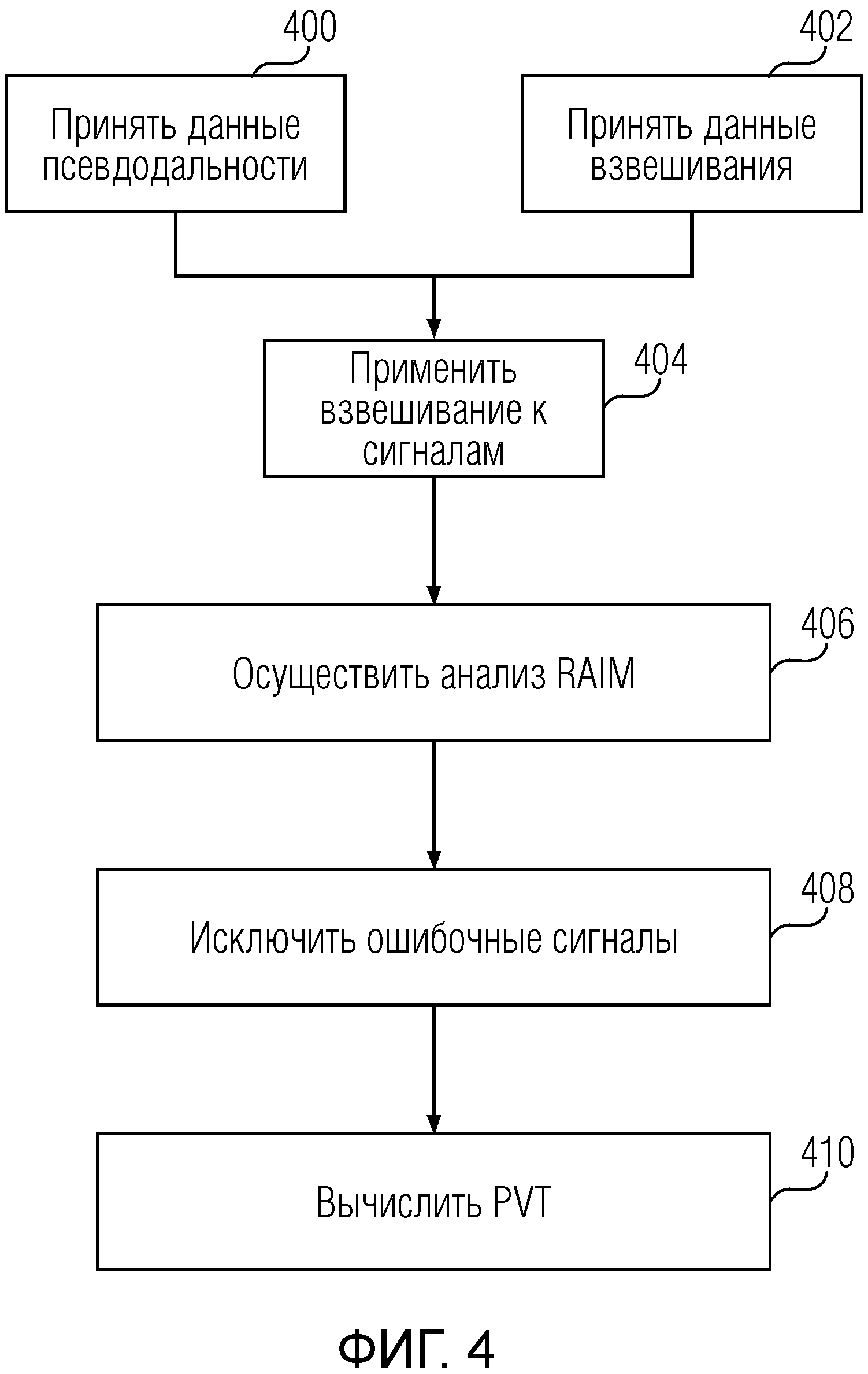
Данные взвешивания затем подаются модулю 218 RAIM, который оперирует, как изложено на фиг. 4.
Когда данные псевдодальности (этап 400) и данные взвешивания (этап 402) были приняты для всех сигналов, модуль 218 RAIM осуществляет процессы RAIM на этапе 404 с использованием известных методик, модифицированных для отражения определенных весов. Например, взвешивание может применяться перед решением уравнения навигации, причем невязки измерения затем используются в установленном алгоритме RAIM (например, в том, который описал Ж. Ч. Джуанг в работе "Применение подхода обнаружения неисправности к автономному контролю целостности GPS" (материалы конференции IEE по радиолокации, эхолокации и навигации, том 145, выпуск 6, стр.342-346, декабрь 1998 г.).
В одном варианте осуществления взвешивание применяется согласно, например, подходам взвешенных наименьших квадратов (или взвешенных полных наименьших квадратов), которые принимают в расчет различные уровни достоверности в измерениях псевдодальности.
Например, измерения псевдодальности высокой достоверности наделяются весом коэффициента достоверности для увеличения их доли, в то время как измерения псевдодальности низкой достоверности наделяются весом другого коэффициента для уменьшения их долей. Таким образом, наименьший квадрат вектора невязки измерения теперь отражает, в этом примере, взвешивание в отношении измерений псевдодальности GNSS высокой достоверности и может быть использован в установленных функциях RAIM (этап 406).
Модуль RAIM может затем действовать для исключения сигналов, которые не соответствуют другим сигналам (этап 408), перед определением данных PVT для блока 104 приемника с использованием модуля 220 навигации (этап 410).
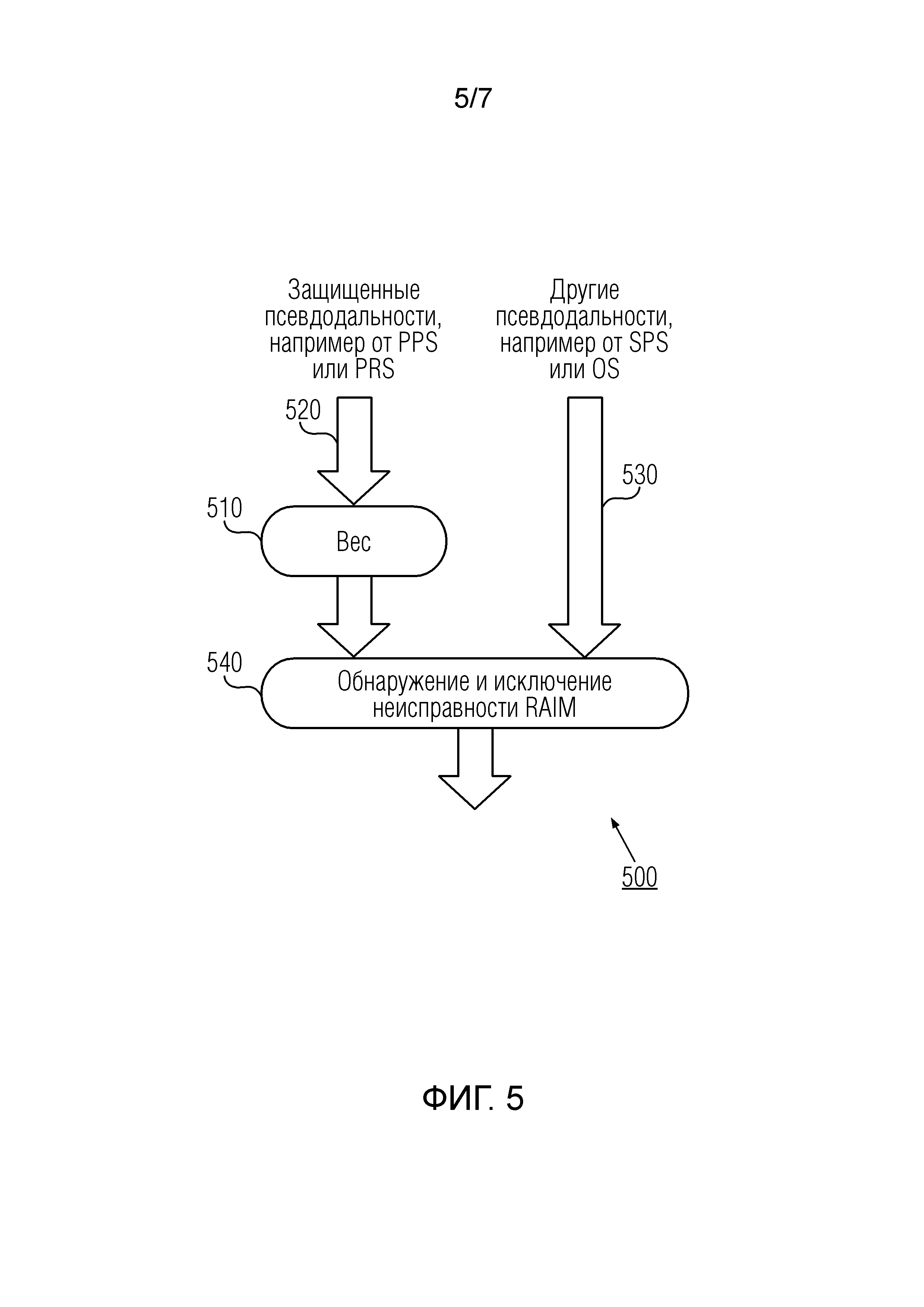
Следует заметить, что альтернативы этому способу могут быть легко представлены специалистом. В частности, и как изложено на фиг. 5, способ 500 может действовать для применения положительного веса 510 ко всем псевдодальностям, определенным из защищенных сигналов 520 (или, разумеется, может, наоборот, применять отрицательный вес 530 ко всем открытым сигналам), на той основе, что защищенные сигналы 520 по своей природе сложнее для имитации или прерывания и более вероятны для приема верным образом.
В таких примерах способ наименьших квадратов (или полных наименьших квадратов) для решения уравнения навигации с использованием измерений псевдодальности может быть использован с обоими из измерений защищенной и незащищенной псевдодальности. Невязки измерений, порождаемые таким образом, могут иметь весовой коэффициент, применяемый для уменьшения невязки измерения защищенной псевдодальности. Взвешенный вектор невязки измерения может затем быть использован в установленном алгоритме 540 RAIM.
Во втором примерном варианте осуществления блок 104 приемника осуществляет способ, как теперь описывается в отношении фиг. 6.
Сначала, на этапе 602, блок 104 приемника принимает некоторое количество спутниковых сигналов. На этапе 604 эти сигналы преобразуются в цифровой сигнал аналого-цифровым преобразователем 204.
На этапе 606 получение сигнала осуществляется с поддержкой (этап 608) криптографического модуля 210 так, чтобы посредством ветви 610 данные псевдодальности были определены (этап 612) для каждого защищенного сигнала, полученного модулем 212 получения. Псевдодальности защищенных сигналов передаются модулю 218 RAIM (этап 614), который осуществляет, на первой ступени, методики RAIM для обеспечения обнаружения неисправности и, если достаточно сигналов доступно, исключения неисправности. Это производит результат с высоким уровнем достоверности.
Способ переходит к рассмотрению открытых сигналов (хотя специалист, разумеется, поймет, что некоторые из этих этапов могут осуществляться одновременно). Сначала осуществляется получение (этап 606), которое обеспечивает возможность определения информации псевдодальности (этап 618) для каждого сигнала модулем 212 получения, как показано посредством ветви 616. Эта информация затем также обеспечивается модулю 218 RAIM, который на этапе 620 осуществляет вычисление RAIM второй ступени с использованием других уровней достоверности для контроля целостности относительно наложенных на набор защищенных псевдодальностей (ступень 1) и других псевдодальностей (ступень 2). Это обеспечивает возможность того, что большая значимость назначается защищенным псевдодальностям в функции RAIM, и, следовательно, того, что точные навигационные данные высокой достоверности определяются 622.
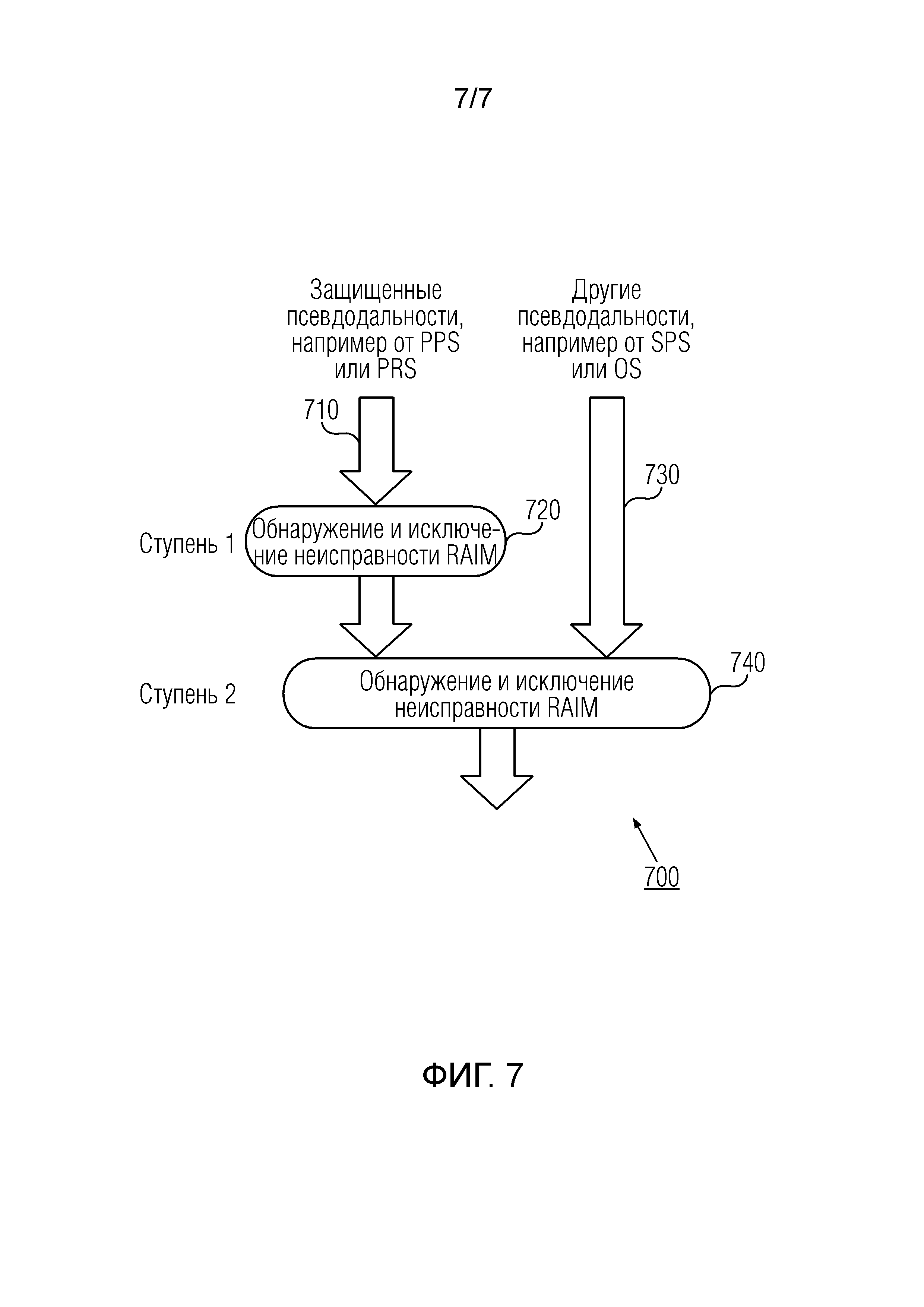
Этот ступенчатый подход резюмируется в схеме на фиг. 7, в которой защищенные псевдодальности 710, например от PPS или PRS, подаются к первой платформе 720 RAIM "ступени 1" для обнаружения и исключения неисправности, в то время как другие (менее защищенные или открытые) псевдодальности 730, например от SPS или OS, подаются непосредственно ко второй платформе 740 RAIM "ступени 2" для обнаружения и исключения неисправности, как объяснено выше. Вторая платформа 740 обнаружения неисправности RAIM затем комбинирует результаты от первой платформы 720 RAIM ступени 1 с ее собственными и выполняет обнаружение и исключение неисправности с более высокой значимостью защищенных псевдодальностей в функции RAIM.
Разумеется, специалисты в данной области техники поймут, что может быть более двух ступеней с последовательным итерационным обнаружением неисправности и исключением для обеспечения высокой достоверности сигналов в зависимости от рассматриваемого применения и среды.
Пользователь может иметь более высокий уровень достоверности в точности сигналов, исходящих от некоторых источников открытых служебных сигналов, чем от других источников. В дополнительном примерном варианте осуществления эти различные уровни достоверности выражаются в числовой форме и используются для обеспечения улучшенных результатов вычислений PVT. В частности, отдельным источникам сигналов назначаются относительные коэффициенты доверия. Это является мерой уровня доверия, которое пользователь имеет к точности или целостности этого источника. В этом варианте осуществления источник сигналов определяется, и сигнал, указывающий на назначенный относительный коэффициент доверия, посылается модулю взвешивания (216 на фиг. 2). Модуль взвешивания принимает в расчет этот относительный коэффициент доверия, когда применяет взвешивание к данным псевдодальности (этап 326 на фиг. 3).
Любое значение диапазона или устройства, приведенное здесь, может быть расширено или изменено без потери желаемого эффекта, как будет очевидно специалисту для понимания указанных здесь принципов.
Подавление помехи в приемнике
Обработка сигналов
Процессор для радиоприемника
Усовершенствования спутниковых способов определения местоположения
Способ и система идентификации транспортных средств
Волокно на основе фотонного кристалла и способ его изготовления
Способ и устройство для приема сигнала
Подавление помехи в приемнике
Обработка сигналов
Способ и система идентификации транспортных средств

