Результат интеллектуальной деятельности: СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КУРСА И ОГРАНИЧЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области систем автоматического управления (САУ) углом курса летательного аппарата (ЛА).
Известны САУ, обеспечивающие отработку заданного угла курса ЛА, с помощью автопилота угла крена, воздействующего на угол отклонения элеронов ЛА, содержащие последовательно соединенные задатчик угла курса, элемент сравнения, вычислитель заданного угла крена, автопилот угла крена, летательный аппарат и датчик угла курса летательного аппарата, имеющий выход, подключенный ко второму входу элемента сравнения [Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 506 с. Стр. 121, рис. 3.24] и [Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. - М.: Машиностроение, 1987. - с. 240. Стр. 234, рис. 15.13].
Эти САУ за счет астатизма системы обеспечивают хорошую точность поддержания заданного значения угла курса. Однако они не позволяют ограничить максимальное значение угла крена в процессе разворота ЛА.
Наиболее близкой по достигаемому техническому результату, выбранной в качестве прототипа, принимается система автоматического управления углом курса и ограничения нормальной перегрузки летательного аппарата, содержащая последовательно соединенные задатчик угла курса, первый элемент сравнения, вычислитель заданного угла крена и второй элемент сравнения, последовательно соединенные вычислитель автопилота угла крена, сервопривод элеронов, летательный аппарат и датчик угла курса летательного аппарата, имеющий выход, подключенный ко второму входу первого элемента сравнения, датчик угла крена летательного аппарата, имеющий выход, подключенный ко второму входу второго элемента сравнения и ко второму входу вычислителя автопилота угла крена, отличающаяся тем, что дополнительно содержит последовательно соединенные задатчик максимальной перегрузки, третий элемент сравнения, вычислитель автомата ограничения перегрузки и алгебраический селектор минимального сигнала, выход которого подключен к входу вычислителя автопилота угла крена, выход второго элемента сравнения подключен ко второму входу алгебраического селектора минимального сигнала, выход датчика угла крена подключен ко второму входу вычислителя автомата ограничения перегрузки, датчик нормальной перегрузки летательного аппарата, имеющий выход, подключенный ко второму входу третьего элемента сравнения [Патент №2503585 РФ на изобретение: МПК 8 В64С 13/18. Система автоматического управления углом курса и ограничения нормальной перегрузки летательного аппарата / В.И. Петунин, Л.М. Неугодникова - Заявка №2012120843/11; Заявл. 21.05.2012. Зарегистр. в Государственном реестре изобретений РФ 10.01.2014. Бюл. №1].
Эта САУ обеспечивает хорошие статические и динамические характеристики канала управления углом курса ЛА, но не позволяет ограничить значение угла крена при развороте (вираже), что может привести к недопустимым аэродинамическим характеристикам ЛА и нарушению безопасности полета при развороте с большими углами крена.
Как известно, одним из наиболее важных ограничений при полете ЛА является ограничение угла крена ЛА. Поворот ЛА в горизонтальной плоскости требует создания центростремительной силы, направленной к центру кривизны траектории. Создание такой силы возможно за счет накренения ЛА на угол крена [Аэромеханика самолета: Динамика полета / Под ред. А.Ф. Бочкарева и В.В. Андриевского. - М.: Машиностроение, 1985. - 360 с. Стр. 108].
При развороте летательного аппарата угол крена не должен превышать максимально допустимого значения. Например, в работе [Николаев Л.Ф. Аэродинамика и динамика полета транспортных самолетов: учебник для вузов. - M.: Транспорт, 1990. - 392 с. Стр. 216] показано, что из условия обеспечения комфорта пассажиров, согласно ЕНЛГС, на виражах и разворотах угол крена не должен превышать 30 градусов. Этому углу крена соответствует нормальная перегрузка nyдоп=1,15.
Известно, что при накренении самолета влево или вправо возникает перегрузка, которая направлена вертикально вверх. В системе автоматического управления углом курса и ограничения нормальной перегрузки летательного аппарата выбранной в качестве прототипа, рассматривается нормальная перегрузка, характерная для маневренных самолетов. Если же брать пассажирский самолет, то при небольших углах крена, перегрузка находиться в пределах нормы. От значения перегрузки можно определить величину крена и построить систему без измерения нормальной перегрузки, но с ограничением угла крена. При ограничении угла крена в отличие от нормальной перегрузки, он может быть отрицательным и положительным, поэтому при ограничении угла крена необходимо учитывать оба знака величины угла крена.
Задачей, на решение которой направлено заявляемое изобретение, является повышение надежности управления ЛА и выдерживание благоприятных условий полета для экипажа и пассажиров.
Технический результат - обеспечение необходимой точности ограничения угла крена при развороте летательного аппарата на заданный угол курса за счет включения в систему каналов ограничения максимального и минимального углов крена с помощью алгебраических селекторов минимального и максимального сигналов.
Поставленная задача решается тем, что в систему автоматического управления углом курса и ограничения угла крена летательного аппарата, содержащую последовательно соединенные задатчик угла курса, первый элемент сравнения, вычислитель заданного угла крена, второй элемент сравнения и алгебраический селектор минимального сигнала, последовательно соединенные вычислитель автопилота угла крена и сервопривод элеронов, выходной сигнал которого определяет угол отклонения элеронов летательного аппарата, датчик угла курса летательного аппарата, имеющий выход, подключенный ко второму входу первого элемента сравнения, датчик угла крена летательного аппарата, имеющий выход, подключенный ко второму входу второго элемента сравнения и ко второму входу вычислителя автопилота угла крена, в отличие от прототипа дополнительно введены последовательно соединенные задатчик максимального угла крена и третий элемент сравнения, выход которого соединен со вторым входом алгебраического селектора минимального сигнала, последовательно соединенные задатчик минимального угла крена, четвертый элемент сравнения и алгебраический селектор максимального сигнала, выход которого соединен с входом вычислителя автопилота угла крена, а второй вход алгебраического селектора максимального сигнала соединен с выходом алгебраического селектора минимального сигнала, выход датчика угла крена летательного аппарата соединен со вторыми входами третьего и четвертого элементов сравнения.
Существо изобретения поясняется чертежами.
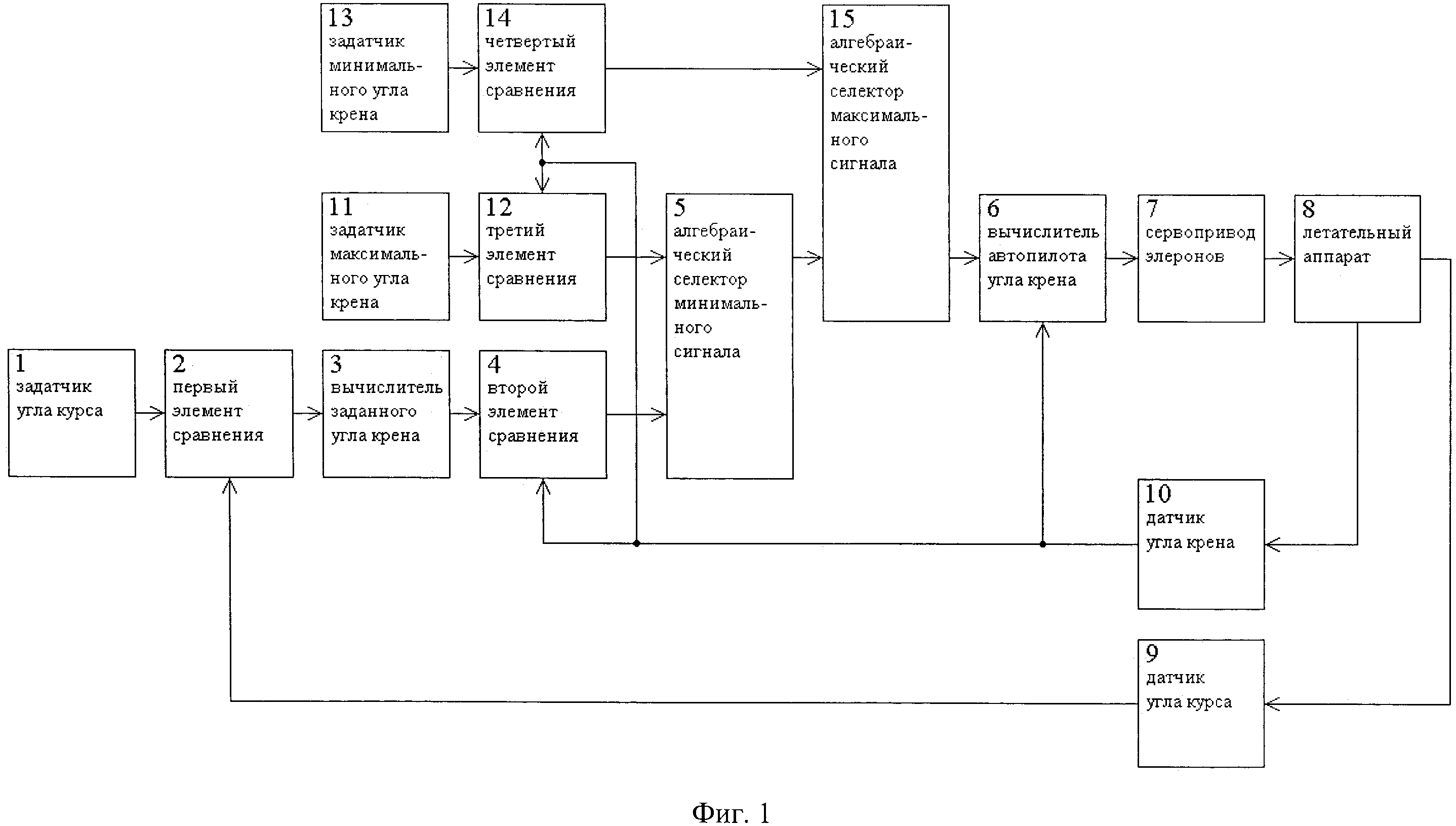
На фиг. 1 представлена структурная схема заявляемой системы автоматического управления углом курса и ограничения угла крена летательного аппарата.
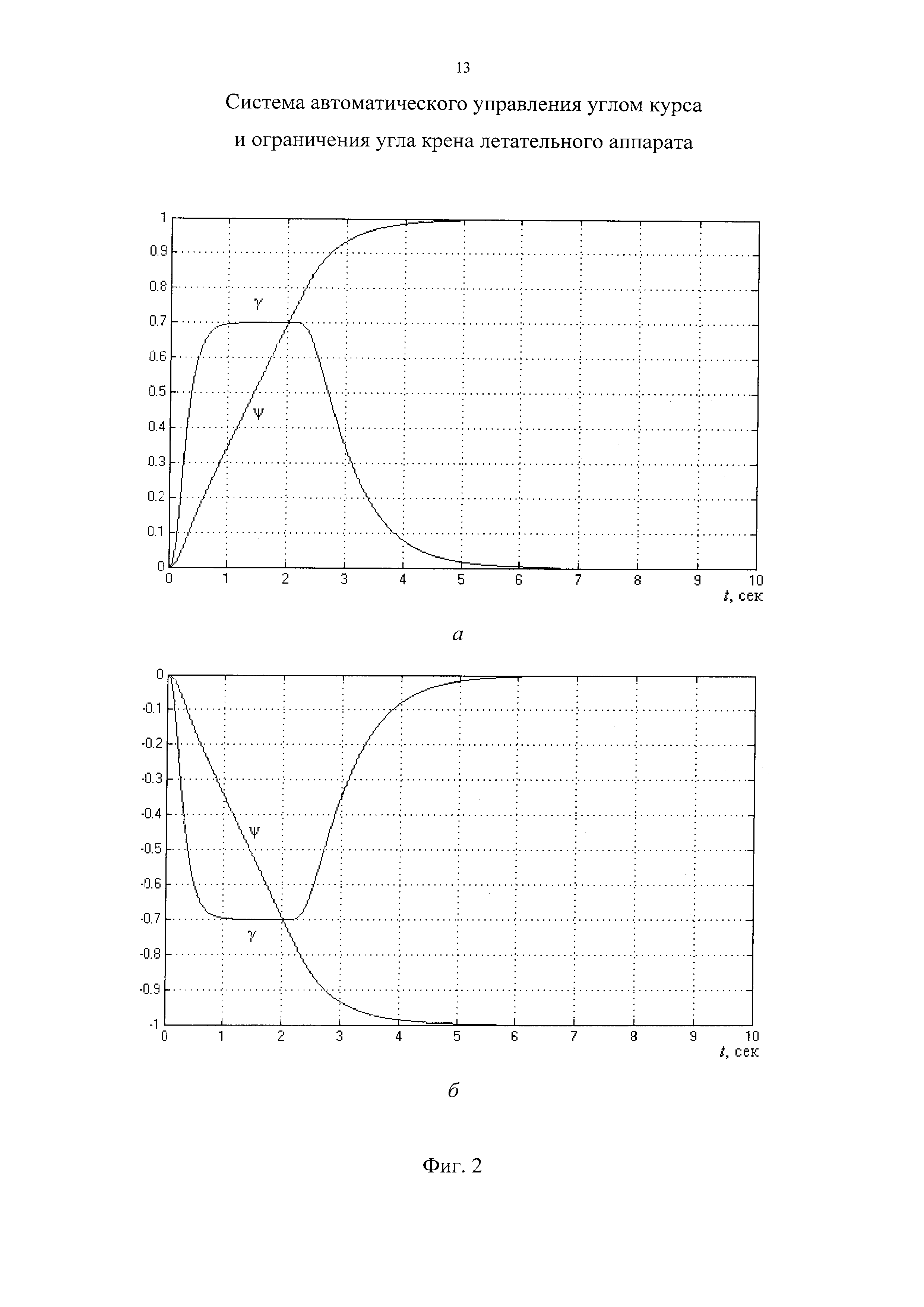
На фиг. 2 представлены результаты моделирования переходных процессов: а - графики переходных процессов в САУ углом курса с ограничением положительного угла крена; б - графики переходных процессов в САУ углом курса с ограничением отрицательного угла крена.
Система автоматического управления углом курса и ограничения угла крена летательного аппарата, содержащая последовательно соединенные задатчик угла курса 1, первый элемент сравнения 2, вычислитель заданного угла крена 3, второй элемент сравнения 4 и алгебраический селектор минимального сигнала 5, последовательно соединенные вычислитель автопилота угла крена 6 и сервопривод элеронов 7, выходной сигнал которого определяет угол отклонения элеронов летательного аппарата 8, датчик угла курса 9 летательного аппарата 8, имеющий выход, подключенный ко второму входу первого элемента сравнения 2, датчик угла крена 10 летательного аппарата 8, имеющий выход, подключенный ко второму входу второго элемента сравнения 4 и ко второму входу вычислителя автопилота угла крена 6, отличающаяся тем, что в нее введены последовательно соединенные задатчик максимального угла крена 11 и третий элемент сравнения 12, выход которого соединен со вторым входом алгебраического селектора минимального сигнала 5, последовательно соединенные задатчик минимального угла крена 13, четвертый элемент сравнения 14 и алгебраический селектор максимального сигнала 15, выход которого соединен с входом вычислителя автопилота угла крена 6, а второй вход алгебраического селектора максимального сигнала 15 соединен с выходом алгебраического селектора минимального сигнала 5, выход датчика угла крена 10 летательного аппарата 8 соединен со вторыми входами третьего 12 и четвертого 14 элементов сравнения.
Ограничение угла крена в приведенной системе достигается за счет введения в ее структуру каналов ограничения максимального и минимального углов крена с помощью алгебраических селекторов минимального и максимального сигналов.
Система автоматического управления углом курса и ограничения угла крена летательного аппарата работает следующим образом.
Сигнал заданного угла курса ψзад с выхода задатчика угла курса 1 поступает на первый вход первого элемента сравнения 2, на второй вход которого поступает сигнал текущего значения угла курса ψ с выхода датчика угла курса 9. В соответствии с отклонением:
текущего значения угла курса ψ от заданного ψзад в вычислителе заданного угла крена 3 формируется заданное значение угла крена γзад, которое
сравнивается во втором элементе сравнения 4 с текущим значением угла крена γ с выхода датчика угла крена 10. На выходе второго элемента сравнения 4 формируется сигнал:
Для построения САУ с ограничением параметров ЛА можно использовать логические устройства, реализующие алгоритмы алгебраического селектирования каналов управления. Обычно применяется принцип селектирования, согласно которому регулируется параметр многомерного объекта управления, наиболее приблизившийся к величине, определяемой программой управления [Петунин В.И. Синтез систем автоматического управления летательными аппаратами с автоматами ограничений предельных параметров // Изв. вузов. Приборостроение. 2010. Том 53. №10. - С. 18-24.]. Такое селектирование реализуется с помощью алгебраических селекторов.
Для того чтобы регулируемые параметры не превысили максимальных допустимых значений (ограничение сверху), селектор должен пропустить на управление сигнал, соответствующий получению минимальной величины управляющего сигнала. Такое селектирование называют селектированием по минимуму, а селектор - селектором минимальных сигналов управления.
Если же ограничивают минимальные значения параметров (ограничение снизу), то предпочтение отдается регулятору параметра, для поддержания которого требуется наибольший управляющий сигнал, т.е. осуществляется селектирование по максимуму. В этом случае используют селектор максимальных сигналов управления.
Относительно разности входных сигналов ε=U1-U2 выражение, описывающее работу алгебраического селектора двух величин, преобразуется с использованием операции выделения модуля следующим образом:

где μ=1 для селектора максимального сигнала; μ=-1 для селектора минимального сигнала.
Так как в данном случае необходимо ограничить максимальное и минимальное значение угла крена, то в рассматриваемой системе должны использоваться алгебраические селекторы минимального 5 и максимального сигналов 15.
Сигнал максимального значения угла крена γmax с выхода задатчика максимального угла крена 11 поступает на первый вход третьего элемента сравнения 12, на второй вход которого поступает сигнал текущего значения угла крена γ с выхода датчика угла крена 10. На выходе третьего элемента сравнения 12 формируется сигнал:
который поступает на вход алгебраического селектора минимального сигнала 5.
Сигнал минимального значения угла крена γmin с выхода задатчика минимального угла крена 13 поступает на первый вход четвертого элемента сравнения 14, на второй вход которого поступает сигнал текущего значения угла крена γ с выхода датчика угла крена 10. На выходе четвертого элемента сравнения 14 формируется сигнал:
который поступает на вход алгебраического селектора максимального сигнала 15.
Выходной сигнал алгебраических селекторов минимального 5 и максимального сигнала 15

подается на вход вычислителя автопилота угла крена 6, выход которого поступает на вход сервопривода элеронов 7 летательного аппарата 8.
Селекторы вводятся в САУ для плавного переключения каналов управления и обеспечивают во всех условиях работы управляющее воздействие только одного из нескольких каналов управления, включаемых в работу в зависимости от режима работы объекта управления. При этом каждый из каналов управления работает автономно и его параметры обычно выбираются без учета взаимодействия с другими каналами. Это позволяет сохранить статическую точность и запасы устойчивости, свойственные отдельным каналам управления.
Следовательно, алгебраический селектор обеспечивает плавное переключение с одного канала на другой, например, с автопилота угла крена на автоматы ограничения предельных значений углов крена и обратно на автопилот.
Аналитический синтез передаточных чисел автопилота и автоматов ограничения с учетом заданного качества САУ может быть проведен с помощью метода стандартных переходных характеристик [Петунин В.И. Синтез систем автоматического управления летательными аппаратами с автоматами ограничений предельных параметров // Изв. вузов. Приборостроение. 2010. Том 53. №10. - С. 18-24.]. При этом должно выполняться равенство передаточных функций исходной Ф(р) и желаемой систем управления Ф*(р):

Рассмотрим, синтез статического автопилота угла крена с жесткой обратной связью в контуре сервопривода элеронов.
Передаточная функция ЛА по углу крена γ при управлении элеронами δЭ:
где nэ и n22 - безразмерные коэффициенты.
Закон управления автопилота берем в виде:
где kγ и  - передаточные числа автопилота.
- передаточные числа автопилота.
Тогда передаточная функция замкнутой системы управления углом крена по задающему воздействию имеет вид:

Так как разность порядков полиномов знаменателя и числителя передаточной функции рассматриваемой системы Фγ(p) равна двум, то задаем желаемую передаточную функцию системы в виде:
где d - коэффициент относительного демпфирования; ω - собственная частота.
Приравняем передаточную функцию системы Фγ(р) к желаемой передаточной функции  . Выравнивая коэффициенты при соответствующих степенях оператора р, получаем систему двух уравнений с двумя неизвестными kγ, :
. Выравнивая коэффициенты при соответствующих степенях оператора р, получаем систему двух уравнений с двумя неизвестными kγ, :
Отсюда находим передаточные числа автопилота угла крена:
Далее рассмотрим САУ углом курса ЛА. Связь между углами курса и крена согласно работе [Боднер В.А. Системы управления летательными аппаратами: Учебник для студентов авиационных специальностей вузов. М.: Машиностроение, 1973. - 506 с] определяется следующим выражением:
где
Рассогласование по углу курса  умноженное на коэффициент k* и передаточную функцию инерционного звена Wиз(p), является задающим сигналом в канале крена, т.е.
умноженное на коэффициент k* и передаточную функцию инерционного звена Wиз(p), является задающим сигналом в канале крена, т.е.

Если передаточную функцию инерционного звена выбрать обратной числителю выражения Wψγ(р)
то тогда передаточная функция замкнутой системы управления углом курса по задающему воздействию имеет вид:

Так как разность порядков полиномов знаменателя и числителя передаточной функции рассматриваемой системы Фψ(р) равна трем, то задаем желаемую передаточную функцию системы в виде:
где А1 и А2 - коэффициенты Вышнеградского; Ω - собственная частота.
Приравняем передаточную функцию системы Фψ(р) к желаемой передаточной функции  Выравнивая коэффициенты при соответствующих степенях оператора р, получаем систему трех уравнений:
Выравнивая коэффициенты при соответствующих степенях оператора р, получаем систему трех уравнений:
Отсюда находим соотношения между параметрами каналов управления углами курса и крена:
или
Тогда в результате синтеза получаем следующие возможные значения параметров САУ:
из соотношения  если d=1, то А1=А2=4;
если d=1, то А1=А2=4;
из соотношения  если k*=1, то Ω=4;
если k*=1, то Ω=4;
из соотношения  получаем ω=8.
получаем ω=8.
Проведенный синтез подтверждаются результатами моделирования переходных процессов в заявляемой системе автоматического управления углом курса и ограничения угла крена летательного аппарата, представленными на фиг. 2, где задающие воздействия каналов: ψзад=1; γmax=0,7; γmin=-0,7.
Переходные процессы полученные в САУ углом курса с автоматом ограничения угла крена являются удовлетворительными, поскольку показывают необходимую точность ограничения угла крена и хорошее качество управления - плавность и монотонность переходных процессов на режимах переключения каналов системы.
Итак, заявляемое изобретение позволяет, благодаря введению в структуру САУ углом курса ЛА автомата ограничения угла крена с помощью алгебраических селекторов минимального и максимального сигналов, обеспечить необходимую точность ограничения угла крена при управлении углом курса.
Система автоматического управления углом курса и ограничения угла крена летательного аппарата, содержащая последовательно соединенные задатчик угла курса, первый элемент сравнения, вычислитель заданного угла крена, второй элемент сравнения и алгебраический селектор минимального сигнала, последовательно соединенные вычислитель автопилота угла крена и сервопривод элеронов, выходной сигнал которого определяет угол отклонения элеронов летательного аппарата, датчик угла курса летательного аппарата, имеющий выход, подключенный ко второму входу первого элемента сравнения, датчик угла крена летательного аппарата, имеющий выход, подключенный ко второму входу второго элемента сравнения и ко второму входу вычислителя автопилота угла крена, отличающаяся тем, что в нее введены последовательно соединенные задатчик максимального угла крена и третий элемент сравнения, выход которого соединен со вторым входом алгебраического селектора минимального сигнала, последовательно соединенные задатчик минимального угла крена, четвертый элемент сравнения и алгебраический селектор максимального сигнала, выход которого соединен с входом вычислителя автопилота угла крена, а второй вход алгебраического селектора максимального сигнала соединен с выходом алгебраического селектора минимального сигнала, выход датчика угла крена летательного аппарата соединен со вторыми входами третьего и четвертого элементов сравнения.
Способ изготовления огнестойкого шланга
Магнитная система синхронного двигателя с инкорпорированными постоянными магнитами и с асинхронным пуском.
Высокооборотный электромеханический преобразователь энергии с воздушным охлаждением (варианты)
Способ электрополирования металлической детали
Способ упрочнения режущего инструмента осаждением мультислойных покрытий системы ti - al
Способ электрополирования лопаток блиска
Радиофотонный волоконно-оптический преобразователь параметров сигналов
Способ определения толщины отложений на внутренней поверхности трубопровода
Электрическая машина с интенсивной системой охлаждения
Способ фрикционной сварки листовых заготовок
Система автоматического управления углом тангажа и ограничения предельных значений параметров летательного аппарата
Способ формирования траектории полета информационного летательного аппарата и устройство для его осуществления
Помехоустойчивый самонастраивающийся измеритель температуры газа газотурбинного двигателя
Измеритель температуры газа газотурбинного двигателя
Система автоматического управления углом тангажа и ограничения угла атаки летательного аппарата
Система автоматического управления углом крена со статическим автопилотом и с ограничением угловой скорости крена летательного аппарата
Система автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата

