Результат интеллектуальной деятельности: Система восстановления курсовой ориентации космического аппарата с использованием орбитального гирокомпаса
Вид РИД
Изобретение
Предлагаемое изобретение относится к области космической техники и может быть использовано для восстановления курсовой ориентации космического аппарата (КА) относительно орбитальной системы координат (ОСК) с применением орбитального гирокомпаса (ОГК) бесплатформенного типа.
В известных системах ориентации, построенных по принципу орбитального гирокомпасирования, восстановление курсовой ориентации выполняется путем простого включения режима ОГК после того как вертикаль КА построена с помощью прибора ориентации по Земле (ПОЗ), см. например, книгу [1] авторов Бесекерского В.А., Иванова В.А., Самотокина Б.Б. «Орбитальное гирокомпасирование». СПб. 251 с. 1993.
В книге рассмотрено устройство восстановления курсовой ориентации КА с помощью гироорбитанта (гироорбиты). К недостаткам работы устройства следует отнести большое время на восстановление курсовой ориентации и низкое качество переходного процесса, выражающееся в большой величине перерегулирования в каналах угловой ориентации КА порядка 5÷10°. Аналогичными недостатками обладают все, без исключения, известные типы ОГК, например, [3-6]. Это связано с тем, что в классическом ОГК восстановление курсовой ориентации осуществляется путем непосредственного включения режима гирокомпасирования, который принципиально не приспособлен к работе в таком режиме. При этом движение КА в сторону устойчивого полюса (плоскость орбиты) происходит слишком долго, некоординированно, с большим ошибками по каналам ориентации. Крайне негативно этот недостаток проявляется в системах управления орбитальных КА с релейным режимом стабилизации на реактивных двигателях.
Близким аналогом может служить техническое решение, представленное в патенте 2509690 RU, которое имеет указанные выше недостатки, но имеет  возможности для их устранения.
возможности для их устранения.
Техническим результатом является повышение качества и существенное уменьшение времени переходного процесса при восстановлении курсовой ориентации КА с применением ОГК бесплатформенного типа.
В отличие от известного устройства, которое содержит прибор ориентации по Земле (ПОЗ), а так же последовательно включенные в канале крена первый сумматор, первый модуль усиления и преобразования (МУП), второй сумматор, третий сумматор, первый интегратор, выход и вход которого являются входами в контур системы стабилизации (СС) КА по крену соответственно по углу и угловой скорости, при этом выход первого интегратора одновременно подключен ко второму входу первого сумматора, содержащее в канале тангажа последовательно включенные четвертый сумматор, второй МУП, пятый и шестой сумматоры, второй интегратор, выход и вход которого являются входами в контур СС КА по тангажу соответственно по углу и угловой скорости, при этом выход второго интегратора одновременно подключен ко второму входу четвертого сумматора, содержащее в канале курса косинусный (КПУ) и синусный преобразователи углов (СПУ), вход первого из которых соединен со входом первого МУП, а вход второго соединен со входом второго МУП, при этом выходы обоих преобразователей подключены соответственно к первому и второму входам седьмого сумматора, который включен в цепь последовательно соединенных самого седьмого сумматора, третьего МУП, восьмого и девятого сумматоров и третьего интегратора, выход и вход которого являются входами в контур СС КА по курсу соответственно по углу и угловой скорости, содержащая четыре блока компенсации взаимовлияния каналов ориентации (БКВК), входы первого и второго из которых подключены к выходу третьего интегратора, а их выходы подключены ко вторым входам третьего и шестого сумматоров соответственно, вход третьего БКВК подключен к выходу первого интегратора, а выход подключен ко второму входу девятого сумматора, вход четвертого БКВК подключен к выходу второго интегратора, а выход подключен к третьему входу девятого сумматора, содержащая так же блок гироскопических измерителей угловых скоростей (БИУС), датчики которого установлены по связанным осям КА и навигационно-баллистический блок (НББ), в систему дополнительно введены модуль логического нуля (МЛН) с функцией «пересечения» сигналов  , где ε заданное малое значение сигналов ПОЗ, например 0,1°, модуль вычисления курсового угла (МВКУ) с вычислительной функцией
, где ε заданное малое значение сигналов ПОЗ, например 0,1°, модуль вычисления курсового угла (МВКУ) с вычислительной функцией  , где ωXi, ωZi - измеренные БИУС абсолютные угловые скорость КА в каналах крена и тангажа соответственно, модуль формирования команды (МФК) на подключение БИУС и ПОЗ к ОГК, модуль расчета программного поворота (МРПП), пять нормально-замкнутых ключей (КНЗ) и пять нормально разомкнутых ключей (КНР), при этом входы первого и второго КНЗ подключены к выходам ПОЗ по крену и тангажу, а их выходы - ко входам ИО в каналах крена и тангажа соответственно, входы третьего, четвертого и пятого КНЗ соединены с выходами БИУС в каналах крена, курса и тангажа, а их выходы подключены ко входам ИО в каналах крена, курса и тангажа соответственно, входы первого и второго КНР соединены с выходами ПОЗ по крену и тангажу, а их выходы подключены к первым входам первого и четвертого сумматоров соответственно, входы третьего, четвертого и пятого КНP соединены с выходами БИУС по крену, курсу и тангажу, а их выходы подключены ко вторым входам второго, восьмого и пятого сумматоров соответственно, первый и второй вход МЛН соединены с выходами ПОЗ соответственно по крену и тангажу, а его выход подключен к первому входу МВКУ, второй и третий входы которого подключены к выходам БИУС в каналах крена и тангажа соответственно, а выход подключен одновременно ко входам МФК и МРПП, при этом выход МФК подключен ко вторым входам всех КНЗ и всех КНР, а так же к первому входу МРПП, второй вход которого подключен к НББ, а его первый, второй и третий выходы подключены к третьим входам второго, восьмого и пятого сумматоров, а четвертый - ко вторым входам первого, второго, третьего и четвертого БКВК и вторым входам КПУ и СПУ.
, где ωXi, ωZi - измеренные БИУС абсолютные угловые скорость КА в каналах крена и тангажа соответственно, модуль формирования команды (МФК) на подключение БИУС и ПОЗ к ОГК, модуль расчета программного поворота (МРПП), пять нормально-замкнутых ключей (КНЗ) и пять нормально разомкнутых ключей (КНР), при этом входы первого и второго КНЗ подключены к выходам ПОЗ по крену и тангажу, а их выходы - ко входам ИО в каналах крена и тангажа соответственно, входы третьего, четвертого и пятого КНЗ соединены с выходами БИУС в каналах крена, курса и тангажа, а их выходы подключены ко входам ИО в каналах крена, курса и тангажа соответственно, входы первого и второго КНР соединены с выходами ПОЗ по крену и тангажу, а их выходы подключены к первым входам первого и четвертого сумматоров соответственно, входы третьего, четвертого и пятого КНP соединены с выходами БИУС по крену, курсу и тангажу, а их выходы подключены ко вторым входам второго, восьмого и пятого сумматоров соответственно, первый и второй вход МЛН соединены с выходами ПОЗ соответственно по крену и тангажу, а его выход подключен к первому входу МВКУ, второй и третий входы которого подключены к выходам БИУС в каналах крена и тангажа соответственно, а выход подключен одновременно ко входам МФК и МРПП, при этом выход МФК подключен ко вторым входам всех КНЗ и всех КНР, а так же к первому входу МРПП, второй вход которого подключен к НББ, а его первый, второй и третий выходы подключены к третьим входам второго, восьмого и пятого сумматоров, а четвертый - ко вторым входам первого, второго, третьего и четвертого БКВК и вторым входам КПУ и СПУ.
На фигурах 1÷3 показан пример практической реализации предлагаемого устройства.
На фиг. 1 обозначено:
1 - ПОЗ прибор ориентации по Земле;
2 - БИУС блок гироскопических измерителей угловой скорости;
3 - НББ навигационно-баллистический блок, содержащий, центральный бортовой компьютер (ЦБК) и аппаратуру спутниковой навигации (АСН);
4÷12 - сумматоры;
13÷15 - МУП1, МУП2 МУП3 первый, второй и третий модули усиления и преобразования;
16÷17 - КПУ и СПУ косинусный и синусный преобразователи;
18÷21 - БКВК блоки компенсации взаимовлияния каналов ориентации;;
22÷24 - интеграторы;
25 - МЛН модуль логического нуля;
26 - МВКУ модуль вычисления угла курса;
27 - МФК модуль формирования команд;
28 - МРПП модуль расчета программного поворота;
КНЗ1÷КHP5 - нормально-замкнутые ключи;
КНР1÷КНР5 - нормально-разомкнутые ключи;
γП, ϑП - выходные сигналы ПОЗ по крену и тангажу соответственно;
ωX, ωY, ωZ - выходные сигналы БИУС в каналах крена, курса и тангажа соответственно;
СС - система стабилизации;
 - орбитальная угловая скорость КА, выдаваемая НББ;
- орбитальная угловая скорость КА, выдаваемая НББ;
 - орбитальная угловая скорость КА, реализуемая в ОГК;
- орбитальная угловая скорость КА, реализуемая в ОГК;
 - вычисленное и запомненное значение курсового угла на момент времени ti;
- вычисленное и запомненное значение курсового угла на момент времени ti;
 - текущее программное значение угла курса и скорость его изменения;
- текущее программное значение угла курса и скорость его изменения;
τ - относительное время программного движения КА;
 - аргумент разности начального запомненного угла курса
- аргумент разности начального запомненного угла курса  и текущего программного значения λ(τ);
и текущего программного значения λ(τ);
 - выходные сигналы ОГК в систему стабилизации КА по углам и угловым скоростям в каналах крена, курса и тангажа соответственно;
- выходные сигналы ОГК в систему стабилизации КА по углам и угловым скоростям в каналах крена, курса и тангажа соответственно;
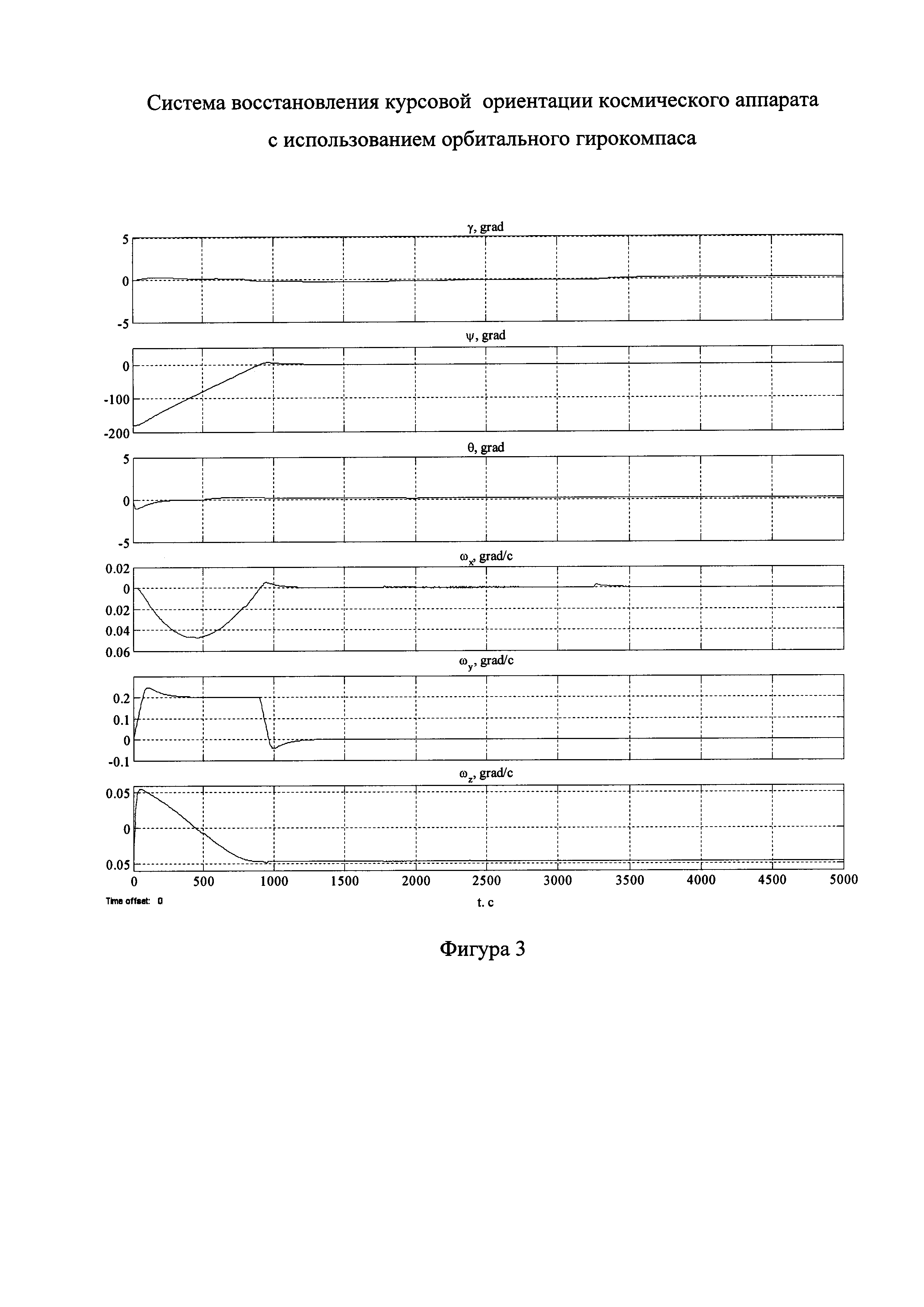
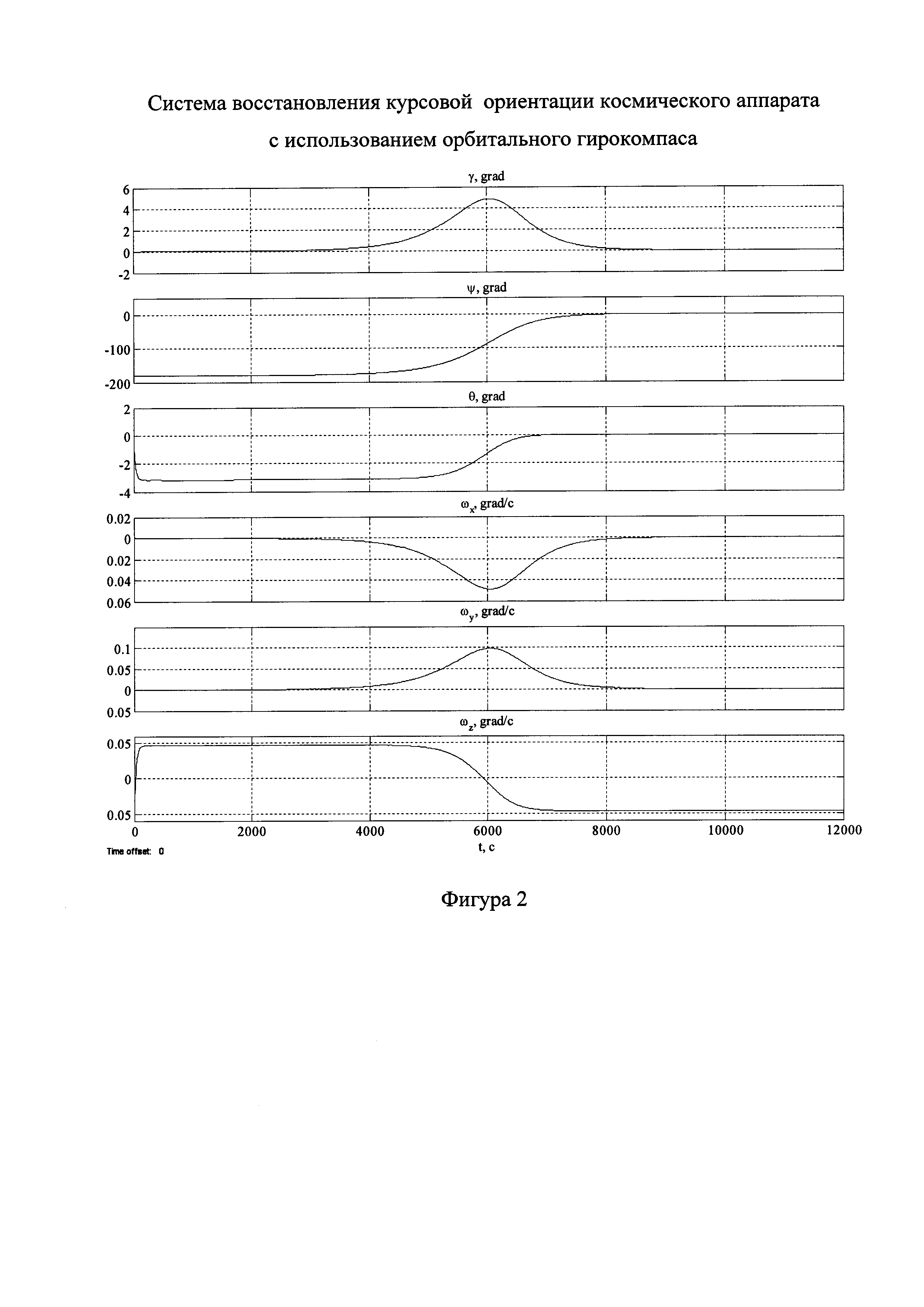
На фигурах 2 и 3 приведены результаты моделирования работы системы восстановления курсовой ориентации КА для известной системы (фиг. 2) и предложенной (фиг. 3).
На фигурах обозначено:
γgrad, ψgrad, θgrad - угловое положение КА относительно ОСК по крену, курсу и тангажу соответственно;


 - абсолютные угловые скорости КА в проекциях на собственные оси крена, курса и тангажа.
- абсолютные угловые скорости КА в проекциях на собственные оси крена, курса и тангажа.
Система ВО работает следующим образом.
В начальный момент времени выполняется приведение КА к местной вертикали, для чего сигналы ПОЗ по крену γП и тангажу γП через нормально-замкнутые ключи КНЗ1 и КНЗ 2 поступают в СС на исполнительные органы (ИО), например маховики. Одновременно с этим сигналы БИУС ωХ, ωY, ωZ в каналах крена, курса и тангажа через нормально-замкнутые ключи КНЗ 3, КНЗ 4 и КНЗ 5 так же подключены к СС для обеспечения устойчивости процесса стабилизации КА.
После приведения КА к местной вертикали, ориентация КА по курсу оказывается в некотором произвольном и неопределенном положении. При этом текущее курсовое положение КА задемпфировано по сигналу БИУС в канале курса и удерживается относительно ОСК достаточно стабильно - изменение курсового положения КА происходит очень медленно и ограничено дрейфом гироскопа на уровне ≤0,1°/час.
С этого момента начинается восстановление курсового положения КА - приведение КА в плоскость орбиты.
Как только в МЛН выполнится условие «пересечения» сигналов  т.е. КА будет приведен к вертикали места с заданной погрешностью ε, МЛН выдает сигнал в МВКУ, для расчета текущего курсового положения
т.е. КА будет приведен к вертикали места с заданной погрешностью ε, МЛН выдает сигнал в МВКУ, для расчета текущего курсового положения  . Расчет выполняется по формуле:
. Расчет выполняется по формуле:  как функция осредненных на момент времени ti показаний БИУС в каналах крена ωXi и тангажа ωZi. Данное значение угла запоминается и принимается за программный угол, на который надо повернуть КА для его перевода в плоскость орбиты.
как функция осредненных на момент времени ti показаний БИУС в каналах крена ωXi и тангажа ωZi. Данное значение угла запоминается и принимается за программный угол, на который надо повернуть КА для его перевода в плоскость орбиты.
Запомненное значение угла  поступает в МФК и МРПП. При поступлении сигнала
поступает в МФК и МРПП. При поступлении сигнала  в МФК этот модуль вырабатывает команду на переключение нормально-замкнутых ключей в положение «разомкнуто», а нормально-разомкнутых ключей в положение «замкнуто». При этом ПОЗ и БИУС отсоединяются от СС и подключаются в контур гирокомпасирования. Ориентация и стабилизация КА в дальнейшем осуществляется только по выходным сигналам гирокомпаса -
в МФК этот модуль вырабатывает команду на переключение нормально-замкнутых ключей в положение «разомкнуто», а нормально-разомкнутых ключей в положение «замкнуто». При этом ПОЗ и БИУС отсоединяются от СС и подключаются в контур гирокомпасирования. Ориентация и стабилизация КА в дальнейшем осуществляется только по выходным сигналам гирокомпаса -  .
.
Одновременно с этим по сигналу МРПП рассчитывает программные движения ОГК в процессе курсового приведения КА: 
 , где
, где  , которые подаются на третьи входы 5, 8 и 11 сумматоров соответственно. Первый и второй сигналы - для компенсации проекций орбитальной угловой скорости в выходных сигналах БИУС крена и тангажа в процессе курсового поворота, а третий - для программного вращения КА по курсу и стабилизации его программного движения в процессе этого движения. Четвертый выход МРПП обеспечивает вычисление текущих значений КПУ и СПУ и вычисления текущих компонент БКВК, которые служат для компенсации «паразитных» перекрестных сигналов в контуре ОГК в процессе программного движения КА. ННБ служит для уточнения угловой орбитальной скорости КА в течение всего времени полета КА.
, которые подаются на третьи входы 5, 8 и 11 сумматоров соответственно. Первый и второй сигналы - для компенсации проекций орбитальной угловой скорости в выходных сигналах БИУС крена и тангажа в процессе курсового поворота, а третий - для программного вращения КА по курсу и стабилизации его программного движения в процессе этого движения. Четвертый выход МРПП обеспечивает вычисление текущих значений КПУ и СПУ и вычисления текущих компонент БКВК, которые служат для компенсации «паразитных» перекрестных сигналов в контуре ОГК в процессе программного движения КА. ННБ служит для уточнения угловой орбитальной скорости КА в течение всего времени полета КА.
Уравнения движения ОГК в процессе курсового приведения КА в плоскость орбиты примут вид:



где к1, к2, к3 - коэффициенты коррекции в каналах крена, курса и тангажа ОГК из состава массивов МПУ 1, 2, 3;
λ(τ) и  - текущее значение программного угла и скорости - задаются проектировщиком исходя из возможностей ИО, например, двигателей маховиков, и требуемого качества переходного процесса.
- текущее значение программного угла и скорости - задаются проектировщиком исходя из возможностей ИО, например, двигателей маховиков, и требуемого качества переходного процесса.
Результаты моделирования процесса восстановления курсовой ориентации КА из крайнего положения  при нулевых начальных положениях КА по γ и ϑ показаны на фигуре 2.
при нулевых начальных положениях КА по γ и ϑ показаны на фигуре 2.
В процессе моделирования допустимая угловая погрешность ε - восстановления курсовой ориентации принималась равной 1% от полного значения  , а текущее значение программной уставки λ(τ) рассчитывалось по формуле:
, а текущее значение программной уставки λ(τ) рассчитывалось по формуле:
λ(τ)=ωЗ⋅τ,
где ωЗ скорость обнуляющего программного поворота задается как максимальная допустимая угловая скорость КА в канале курса. При этом время программного поворота рассчитывалось по формуле:  .
.
Таким образом, для ωЗ=0,2°/с и  время программного поворота составило 900 с и стало на порядок меньше по сравнению со временем известной системы ВО (рис. 2, 3), а перерегулирование в канале курса не превысила 1° или 0,6% - существенно меньше чем в известных системах ВО (рис. 2, 3). Одновременно отклонения КА в каналах крена и тангажа относительно ОСК в течение всего времени поворота изменялись незначительно, оставаясь около нулевых значений.
время программного поворота составило 900 с и стало на порядок меньше по сравнению со временем известной системы ВО (рис. 2, 3), а перерегулирование в канале курса не превысила 1° или 0,6% - существенно меньше чем в известных системах ВО (рис. 2, 3). Одновременно отклонения КА в каналах крена и тангажа относительно ОСК в течение всего времени поворота изменялись незначительно, оставаясь около нулевых значений.
Технический результат достигнут как по качеству переходного процесса - процесс близок к оптимальному, так и по времени - время переходного процесса на восстановления курсовой ориентации КА уменьшилось ~ на порядок.
Список литературы
1. Бесекерский В.А., Иванов В.А.., Самотокин Б.Б. Орбитальное гирокомпасирование. СПб. 251 с. 1993.
2. Патент 2509690 RU.
3. Кэмпбел, Коффи «Цифровые системы отсчета углов». Журнал «Вопросы ракетной техники», 1971 г., №11.
4. Брайсон А.Е., Кортюм В. Вычисление местного углового положения орбитального космического аппарата. Труды III Международного симпозиума ИФАК. Франция, Тулуза, 1970. Управление в космосе. Том 2. М. Наука. 23 с. 1972.
5. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. М. Наука. 598 с. 1974.
6. Bowers J.L., Rodden J.J., Scott E.D., Debra D.B. Orbital Gyrocompassing Heading Reference, AIAA Journal of Spacecrat and Rockets, 1968, v. 5, №. 8.
Система восстановления курсовой ориентации (ВО) космического аппарата (КА) с использованием орбитального гирокомпаса (ОГК), содержащая прибор ориентации по Земле (ПОЗ), блок гироскопических измерителей угловых скоростей (БИУС), навигационно-баллистический блок (НББ), содержащий центральный бортовой компьютер (ЦБК) и аппаратуру спутниковой навигации (АСН), девять сумматоров, первый, второй и третий модули усиления и преобразования (МУП, МУП, МУП), косинусный (КПУ) и синусный (СПУ) преобразователи углов, четыре блока компенсации взаимовлияния каналов ориентации (БКВК), три интегратора, модуль логического нуля (МЛН), модуль вычисления курсового угла (МВКУ), модуль формирования команды (МФК), модуль расчета программного поворота (МРПП), пять нормально-замкнутых ключей (К1÷К5), пять нормально-разомкнутых ключей (К1÷К5), систему стабилизации (СС), при этом выходы ПОЗ подключены ко входам К1 и К2, а также ко входам МЛН, а выходы К1 и К2 являются входами в СС, входы К1, К2 также подключены к выходам ПОЗ, а выход К1 подключен к входу сумматора (4), выход К2 подключен к входу сумматора (10), выход сумматора (4) подключен к входу МУП и ко входу КПУ (16), второй вход сумматора (4) подключен к выходу интегратора (22), выход которого подключен также ко входу БКВК (19), второй вход сумматора (10) подключен к выходу интегратора (24), выход которого подключен также ко входу БКВК (20), выход сумматора (10) подключен к входу МУП и к первому входу СПУ (17), вторые входы КПУ (16) и СПУ (17) подключены к первому выходу МРПП (28), к этому же выходу подключены вторые входы четырех БКВК (18-21), выход МУП подключен ко входу сумматора (5), а его выход подключен последовательно через сумматор (6) ко входу интегратора (22), выход МУП подключен ко входу сумматора (11), выход которого последовательно подключен через сумматор (12) к входу интегратора (24), выходы КПУ (16) и СПУ (17) подключены ко входам сумматора (7), а его выход подключен к входу МУП, выход МУП подключен ко входу сумматора (8), а его выход подключен последовательно через сумматор (9) ко входу интегратора (23), выход которого подключен ко входам БКВК (18) и (21), выход БКВК (18) подключен ко второму входу сумматора (6), выходы БКВК (19) и БКВК (20) подключены ко второму и третьему входам сумматора (9), выход БКВК (21) подключен ко второму входу сумматора (12), входы и выходы интеграторов (22-24) подключены к СС, выходы БИУС подключены поканально ко входам ключей К3 и К3, К4 и К4, К5 и К5, выходы К3-К5 подключены к СС, а выходы К3-К5 - ко вторым входам пятого (5), восьмого (8) и одиннадцатого (11) сумматоров, выход БИУС (2) по крену и тангажу подключен ко входам МВКУ (26), к третьему входу которого подключен выход МЛН (25), выход МВКУ (26) подключен ко входу МФК (27), при этом выход МФК (27) подключен ко вторым входам ключей К1-К5 и К1-К5, выход МВКУ (26) подключен к первому входу МРПП (28), второй, третий и четвертый выходы которого подключены к третьим входам сумматора (5), сумматора (8) и сумматора (11) соответственно, а второй вход МРПП подключен к НББ.
Способ компоновки космического аппарата
Композиционный материал для замещения костной ткани и эндопротезы суставов, изготовленные из него
Способ навигации летательного аппарата
Способ ультразвукового контроля изделий из композиционных материалов
Сверхзвуковая ракета
Космический аппарат-эвакуатор
Способ радиолокационного обзора морской поверхности и устройство для его осуществления
Способ обеспечения герметичности турбонасосного агрегата
Многоконтактный герметичный переход
Устройство для зарядки баллона газом и герметизации сваркой
Способ самонаведения крылатой ракеты
Способ астроориентации орбитального космического аппарата (варианты)

