Результат интеллектуальной деятельности: Система автоматического управления беспилотным летательным аппаратом по углу рыскания
Вид РИД
Изобретение
Изобретение относится к области систем автоматического управления нестационарными объектами, а именно к системам управления беспилотным летательным аппаратом (БЛА).
Известна система управления БЛА, содержащая последовательно соединенные регулятор, исполнительное устройство и беспилотный летательный аппарат, вход которого соединен через первый усилитель с первым входом регулятора, выход беспилотного летательного аппарата через датчик угла рыскания соединен со вторым входом регулятора, а через последовательно соединенные датчик угловой скорости и второй усилитель с третьим входом регулятора [Н.Т. Кузовков. Модальное управление и наблюдающие устройства. - М: Машиностроение, 1976. - С. 15-17 (прототип)].
Недостаток известной системы - низкое качество переходных процессов, отсутствие астатизма и запаса устойчивости при изменении параметров БЛА.
Целью изобретения является повышение запаса устойчивости, обеспечение желаемого качества переходных процессов и астатизма системы при изменении параметров БЛА в широком диапазоне.
Предложенное техническое решение отличается тем, что дополнительно содержит два сумматора, три усилителя, дифференциатор и интегратор, вход системы через первый сумматор подключен к четвертому входу регулятора, а через последовательно соединенные третий усилитель, второй сумматор и интегратор - ко второму входу первого сумматора, выход датчика угловой скорости через четвертый усилитель соединен с третьим входом первого сумматора, через последовательно соединенные дифференциатор и пятый усилитель - с четвертым входом первого сумматора, а выход датчика угла рыскания через шестой усилитель соединен со вторым входом второго сумматора.
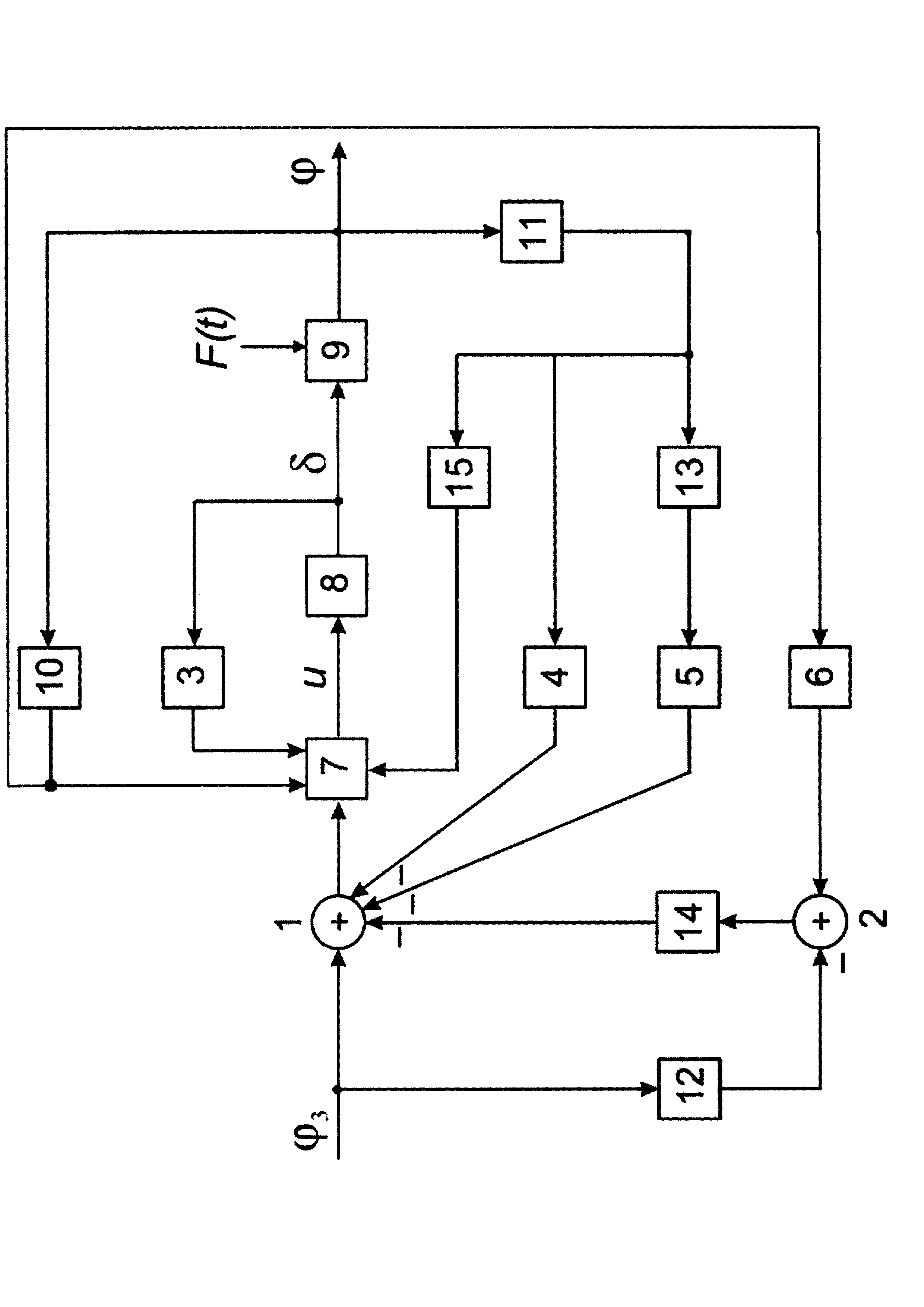
Суть изобретения поясняется чертежом, на котором приняты обозначения:
1, 2 - первый и второй сумматоры соответственно;
3, 4, 5, 6 - первый, четвертый, пятый и шестой усилители соответственно;
7 - регулятор;
8 - исполнительное устройство;
9 - беспилотный летательный аппарат (объект управления);
10 - датчик угла рыскания;
11 - датчик угловой скорости;
12 - третий усилитель;
13 - дифференциатор;
14 - интегратор;
15 - второй усилитель;
u(t) - управление;
δ(t) - отклонение руля;
F(t) - мультипликативная помеха;
Ψ(t), Ψ3(t) - соответственно текущее и заданное значение угла рыскания.
Входом БЛА является руль управления, а выходом - место установки датчика угла рыскания.
Функционирует система управления БЛА 9 следующим образом. Сигнал задания Ψ3(t) поступает через последовательно соединенные первый сумматор 1, регулятор 7 и исполнительное устройство 8 на вход БЛА 9, параметры которого меняются под действием мультипликативной помехи F(t). Выходной сигнал Ψ(t) измеряется датчиком угла рыскания 10, а угловая скорость угла рыскания - датчиком угловой скорости 11. Затем сигналы с выходов датчика угловой скорости 11, датчика угла рыскания 10 и исполнительного устройства 8 (через первый усилитель) в виде отрицательной обратной связи поступают на соответствующие входы регулятора 7. В результате получается структура основного контура управления системы.
Таким образом, БЛА (беспилотник) 9 является нестационарным объектом управления. При изменении параметров БЛА 9 изменяется вид переходных процессов и запасы устойчивости системы управления.
Чтобы обеспечить устойчивость и заданное (желаемое) качество переходных процессов, а также астатизм системы управления БЛА в нее введены дополнительно первый 1 и второй 2 сумматоры, четвертый 4, пятый 5, третий 12 и шестой 6 усилители, а также дифференциатор 13 и интегратор 14. При этом реализуется неявная эталонная модель (на чертеже не указана), и в целом реализуется грубая система управления БЛА 9, которая обеспечивает независимость качества переходных процессов в системе и устойчивости от изменения параметров БЛА 9. Астатические переходные процессы обеспечиваются в грубой системе управления БЛА 9 в основном интегратором 14 (при условии, что коэффициенты усиления третьего 12 и шестого 6 усилителей равны друг другу). Коррекция запаса устойчивости основного контура управления системы обеспечивается сигналами с выходов усилителей 4, 5, а астатизма-с выхода интегратора 14, которые поступают на входы сумматора 1. Структуры БЛА 9 как объекта управления, исполнительного устройства 8 и регулятора 7 определены в [Н.Т. Кузовков. Модальное управление и наблюдающие устройства. - М.: Машиностроение, 1976. - С. 15-17 (прототип)].
Коэффициенты усиления четвертого 4 и пятого 5 усилителей выбираются так, чтобы удовлетворить теореме Харитонова об интервальной устойчивости [Д.П. Ким. Теория автоматического управления. Т. 1. Линейные системы. - М.: Физматлит, 2007. - С. 113-120] на основе знания диапазонов изменения параметров БЛА 9.
Изобретательский уровень предложенного технического решения подтверждается отличительной частью формулы изобретения.
Технический результат от использования изобретения заключается в улучшении качества переходных процессов, обеспечении астатизма системы и повышении ее запаса устойчивости.
Система автоматического управления беспилотным летательным аппаратом по углу рыскания, содержащая последовательно соединенные регулятор и исполнительное устройство, первый усилитель, соединенный с первым входом регулятора, датчик угла рыскания, соединенный со вторым входом регулятора, а через последовательно соединенные датчик угловой скорости и второй усилитель - с третьим входом регулятора, отличающаяся тем, что она дополнительно содержит два сумматора, три усилителя, дифференциатор и интегратор, вход системы через первый сумматор подключен к четвертому входу регулятора, а через последовательно соединенные третий усилитель, второй сумматор и интегратор - ко второму входу первого сумматора, выход датчика угловой скорости через четвертый усилитель соединен с третьим входом первого сумматора, через последовательно соединенные дифференциатор и пятый усилитель - с четвертым входом первого сумматора, а выход датчика угла рыскания через шестой усилитель соединен со вторым входом второго сумматора.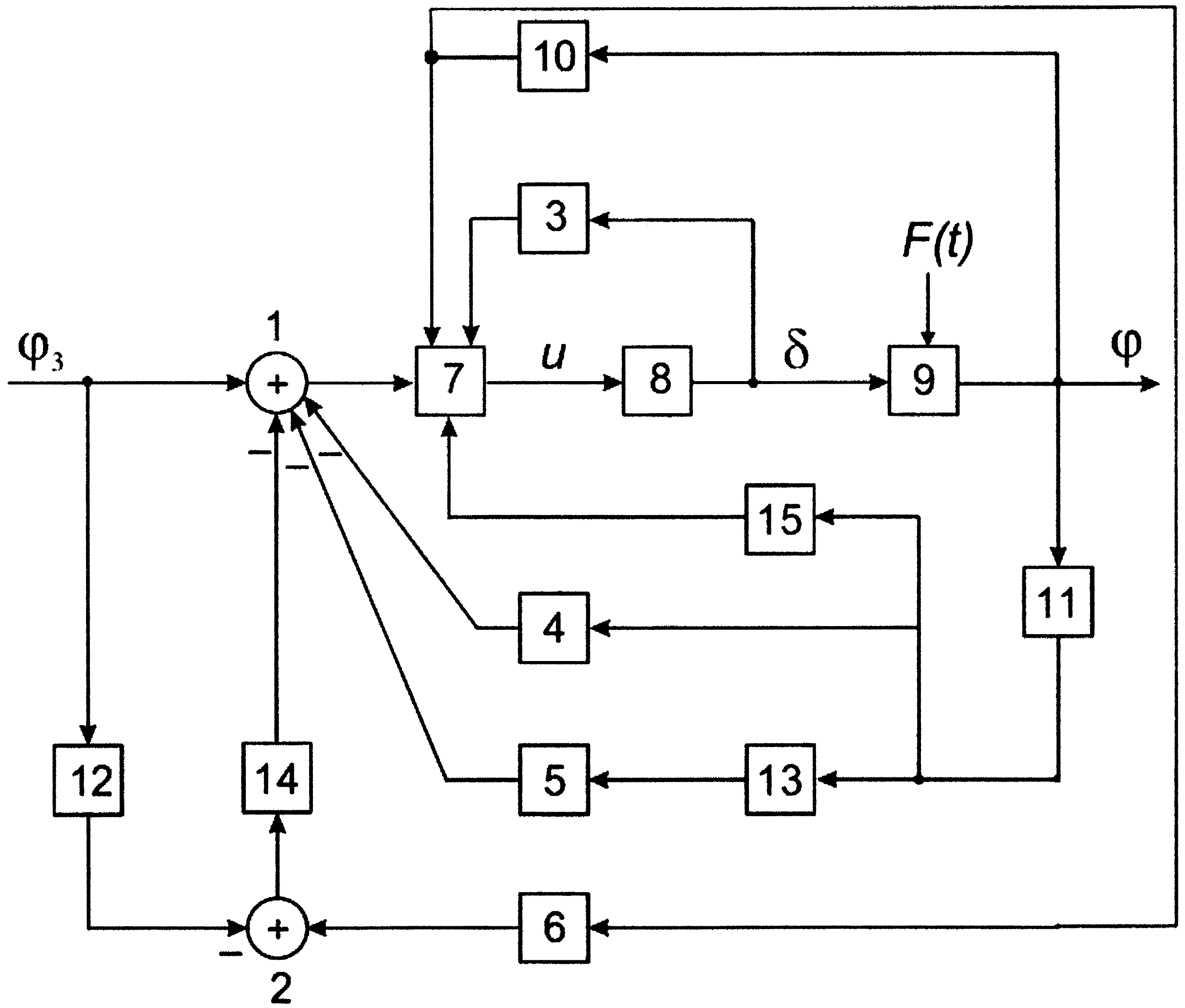
Способ изготовления термочувствительных кабелей-датчиков
Резиновая смесь на основе бутадиен-нитрильных каучуков
Способ получения интеркалированной поли-n-винилкапролактамом наноразмерной η-модификации оксида титана(iv)
Способ получения 2-алкилзамещенных семикарбазидов
Способ разделения смеси циклогексен-вода-циклогексанон-дмсо
Струйно-пневматический пропорциональный регулятор
Способ гранулирования минеральных удобрений
Диспетчерская информационно-аналитическая система
Электромагнитное устройство для определения магнитной восприимчивости вещества
Фотокомпенсационный датчик плотности газов
Способ формирования сигнала управления газогидравлическим рулевым приводом и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ ориентации космического аппарата по углу крена и устройство для его реализации
Способ ориентации космического аппарата по углу крена и устройство для его реализации
Способ грубого управления пространственным движением самолета и система его реализации
Система адаптивного управления электродвигателем

