Результат интеллектуальной деятельности: Способ идентификации уводящей помехи
Вид РИД
Изобретение
Изобретение относится к радиолокационным системам обнаружения и идентификации помех и может быть использовано при их разработке.
Наиболее близким по технической сущности и достигаемому результату к заявляемому способу идентификации уводящей помехи (прототипом к предполагаемому изобретению) является способ идентификации уводящей помехи путем одновременного оценивания скорости по доплеровскому смещению отраженного сигнала V при помощи системы автосопровождения по скорости (АСС) и косвенных измерений скорости по производной от измеряемой дальности  в системе автосопровождения по дальности (АСД), сравнения полученных оценок и обнаружении уводящей помехи в случае несогласованности этих оценок
в системе автосопровождения по дальности (АСД), сравнения полученных оценок и обнаружении уводящей помехи в случае несогласованности этих оценок  . [Куприянов А.И. Теоретические основы радиоэлектронной борьбы. Учебное пособие. - М.: Вузовская книга, 2007, с. 300].
. [Куприянов А.И. Теоретические основы радиоэлектронной борьбы. Учебное пособие. - М.: Вузовская книга, 2007, с. 300].
Способ идентификации уводящей помехи, описанный в прототипе, включает в себя следующие основные этапы: обнаружение отраженного сигнала от цели, измерение скорости цели по доплеровскому смещению отраженного сигнала V, определение скорости цели по производной от дальности  , вычисление их разности Δ, сравнение с пороговым значением hΔ и при Δ≥hΔ принятие решения о наличии уводящей помехи.
, вычисление их разности Δ, сравнение с пороговым значением hΔ и при Δ≥hΔ принятие решения о наличии уводящей помехи.
Недостатком способа-прототипа является низкая вероятность идентификации помех, обеспечивающих согласованный увод по дальности и скорости [Перунов Ю.М. Радиоэлектронное подавление информационных каналов систем управления оружием. - М.: «Радиотехника», 2003, с. 202].
Техническим результатом изобретения способа идентификации уводящей помехи является повышение вероятности идентификации помех, обеспечивающих согласованный увод по дальности и скорости, за счет использования дополнительной информации об ускорении цели и изменении угловой скорости линии визирования в горизонтальной ωГ или вертикальной ωВ плоскостях.
Указанный технический результат достигается тем, что в известном способе идентификации уводящей помехи, заключающемся в обнаружении отраженного сигнала от цели, измерении скорости цели по доплеровскому смещению отраженного сигнала и по производной от дальности, вычислении их разности Δ, сравнении ее с пороговым значением hΔ и при Δ≥hΔ принятии решения о наличии уводящей помехи, в противном случае измеряют ускорение цели  , сравнивают его с пороговым значением hV, измеряют угловые скорости линии визирования в горизонтальной и вертикальной плоскостях ωГ, ωВ соответственно, сравнивают их с пороговыми значениями hωГ, hωВ и при выполнении условия
, сравнивают его с пороговым значением hV, измеряют угловые скорости линии визирования в горизонтальной и вертикальной плоскостях ωГ, ωВ соответственно, сравнивают их с пороговыми значениями hωГ, hωВ и при выполнении условия  и хотя бы одного из условий ωВ≤hωB, ωГ≤hωГ принимают решение о наличие уводящей помехи.
и хотя бы одного из условий ωВ≤hωB, ωГ≤hωГ принимают решение о наличие уводящей помехи.
Сущность заявляемого способа состоит в том, что при выполнении условия Δ<hΔ, где Δ - разность скоростей цели определенных по доплеровскому смещению отраженного сигнала и по производной от дальности, a hΔ - порог обнаружения помехи, равный систематической ошибке вычисления разности скоростей, измеряют угловые скорости линии визирования в горизонтальной и вертикальной плоскостях ωГ, ωВ соответственно, сравнивают их с пороговыми значениями hωГ, hωВ и при выполнении условия и хотя бы одного из условий ωВ≤hωВ, ωГ≤hωГ принимают решение о наличие уводящей помехи.
Воздействие помехи, обеспечивающей согласованный увод по дальности и скорости эквивалентно маневрированию цели. При маневрировании цели в горизонтальной или вертикальной плоскостях возникает ускорение и происходит изменение угловых координат цели, т.е. появляется угловая скорость линии визирования в той или иной плоскости [Меркулов В.И. Авиационные системы радиоуправления, ч. 1, 2. - М.: Радио и связь, 1996]. В случае, когда ускорение цели превышает пороговое значение, определяемое тяговооруженностью современных самолетов [Свищев Г.П. Авиация: Энциклопедия / Гл. ред. Г.П. Свищев. - М.: Большая Российская энциклопедия, 1994, с. 599], но величина угловой скорости линии визирования в той или иной плоскости ниже порогового уровня, то принимается решение о наличии помехи, обеспечивающей согласованный увод по дальности и скорости. Поэтому в предлагаемом способе идентификации уводящей помехи происходит измерение , ωГ, ωВ и сравнение их с пороговыми значениями.
Формирование решения о наличии уводящей помехи при Δ≥hΔ, как в способе прототипе, и в противном случае с учетом сравнения ускорения цели и значений угловых скоростей линии визирования в горизонтальной и вертикальной плоскостях с пороговым уровнем обнаружения помехи, позволяет обнаруживать не только уводящие помехи по дальности или скорости, как в прототипе, но и помехи, уводящие согласованно по дальности и скорости. Этим достигается указанный в изобретении технический результат.
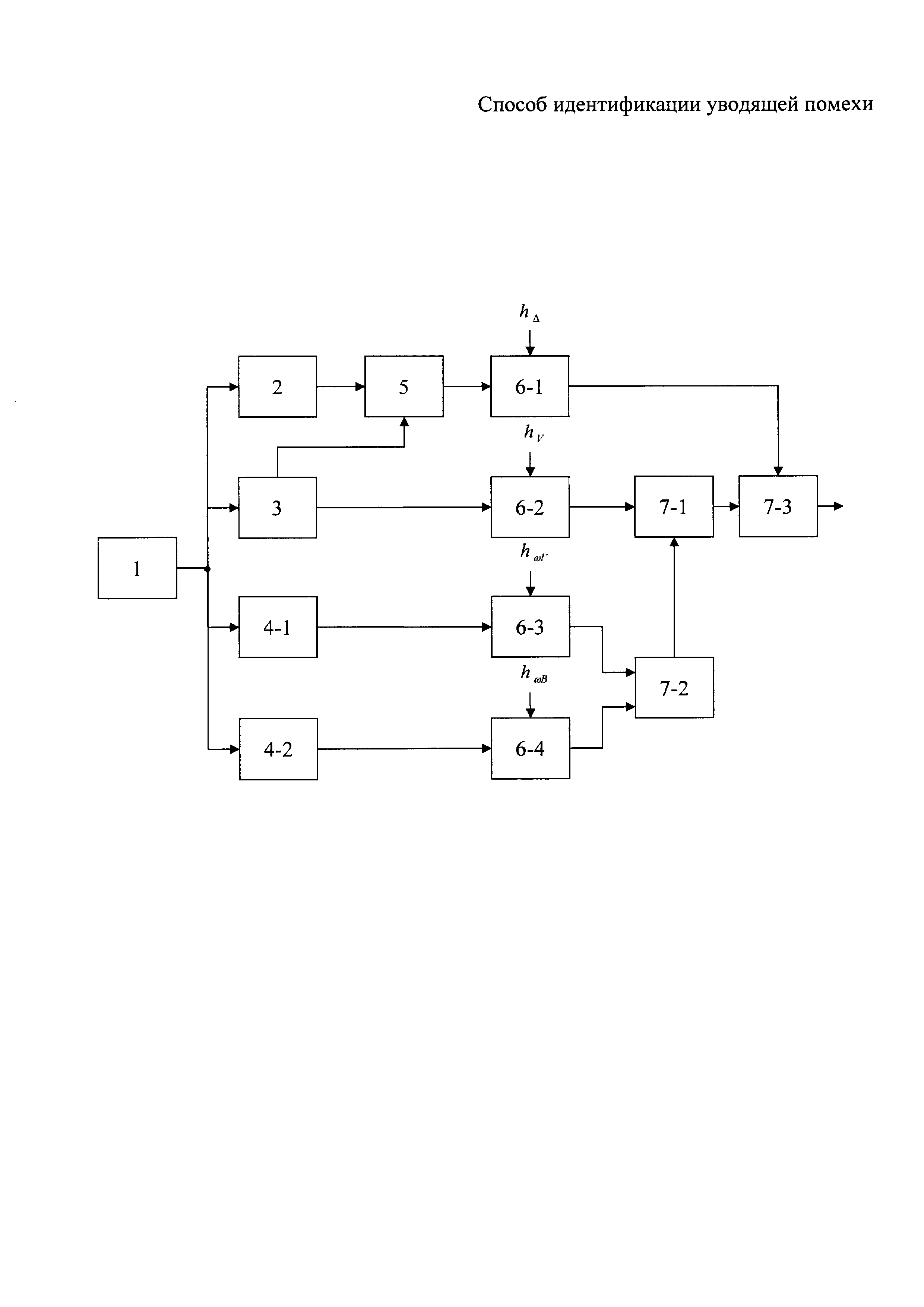
Способ идентификации уводящей помехи может быть реализован, например, с помощью устройства, схема которого приведена на фигуре, где обозначено: 1 - приемо-передающий тракт, 2 - система автосопровождения по дальности, 3 - система автосопровождения по скорости, 4 - система автосопровождения по направлению, 5 - вычитающее устройство, 6 - схема сравнения, 7 - решающее устройство.
Система автосопровождения по направлению 4 предназначена для формирования текущих значений угловых скоростей линии визирования в горизонтальной ωГ и вертикальной ωВ плоскостях и может быть выполнена, например, по схеме угломера [Антипов В.Н. Многофункциональные радиолокационные комплексы истребителей: учеб. пособие для вузов / В.Н. Антипов, Е.Е. Колтышев, Г.С. Кондратенков и др. - М.: Радиотехника. 2014, с. 133].
Назначение вычитающего устройства 5 и схемы сравнения 6 ясно из их названия.
Решающее устройство 7 предназначено для формирования сигнала о наличие уводящей помехи, на основе поступающих сигналов со схемы сравнения 6 и может быть выполнено, например, с использованием элементов «и» и «или». Выход с блока 7 является выходом устройства.
Устройство функционирует следующим образом.
Из приемо-передающего тракта 1 после первичной обработки сигнал от цели поступает в систему автосопровождения по дальности 2, в систему автосопровождения по скорости 3 и в систему автосопровождения по направлению 4. Далее в блоке 2 вычисляется значение скорости по производной от измеряемой дальности , а в блоке 3 формируются значения скорости по доплеровскому смещению отраженного сигнала V и ускорения . Откуда, значения V и подаются на вычитающее устройство 5, где вычисляется их разность Δ, которая в блоке 6-1 сравнивается с порогом hΔ. При выполнении условия Δ≥hΔ на первый вход блока 7-3, решающего устройства, для выполнения операции дизъюнкции поступает сигнал о наличие уводящей помехи.
В противном случае, значения ускорения из блока 3 поступают в блок 6-2, сравниваются здесь с hV и подаются на первый вход блока 7-1 решающего устройства, выполняющего операцию конъюнкции. Одновременно с этим, в блоках 4-1 и 4-2 системы автосопровождения по направлению вычисляются значения угловой скорости линии визирования в горизонтальной ωГ и вертикальной ωВ плоскостях и поступают в блоки 6-3 и 6-4, сравниваются со значениями hωГ и hωВ соответственно и подвергаются операции дизъюнкции в блоке 7-2. Результирующий сигнал с выхода подается на второй вход блока 7-1, где в случае выполнения условия и хотя бы одного из условий ωB≤hωВ, ωГ≤hωГ формируется сигнал о наличие уводящей помехи, поступающий на второй вход блока 7-3. В результате операции дизъюнкции сигналов блок 7-3 формирует окончательное решение о наличии уводящей помехи.
Предлагаемое техническое решение является новым, поскольку из доступных источников неизвестен способ идентификации уводящей помехи, заключающийся в использовании дополнительной информации об ускорении цели и изменении угловой скорости линии визирования в горизонтальной ωГ или вертикальной ωВ плоскостях.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявляемый способ идентификации уводящей помехи обеспечивает повышение вероятности идентификации помех, обеспечивающих согласованный увод по дальности и скорости, за счет использования дополнительной информации об ускорении цели и изменении угловой скорости линии визирования в горизонтальной ωГ или вертикальной ωВ плоскостях.
Способ идентификации уводящей помехи, заключающийся в обнаружении отраженного сигнала от цели, измерении скорости цели по доплеровскому смещению отраженного сигнала и по производной от дальности, вычислении их разности Δ, сравнении ее с пороговым значением h и при Δ>h принятии решения о наличии уводящей помехи, отличающийся тем, что при Δ

Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата
Способ управления приемниками воздушного давления
Способ определения расстояния до неподвижного источника излучения движущимся пеленгатором
Способ формирования маршрута носителя пеленгатора
Устройство адаптивной маскировки объектов
Способ определения дальности до неподвижного источника излучения движущимся пеленгатором
Фазовый пеленгатор
Способ буксировки самолетов с использованием малогабаритного буксировщика с дистанционным управлением
Способ измерения задержки радиосигналов
Способ амплитудного двухмерного пеленгования
Способ формирования радиолокационных изображений
Способ расчетно-экспериментальной оценки радиационной стойкости интегральных схем к воздействию отдельных заряженных частиц, основанный на локальном лазерном облучении
Способ обнаружения препятствий в зоне посадки вертолета
Устройство для перекладки рельсовых плетей с заменой рабочего канта в кривых участках железнодорожного пути с различными типами рельсовых скреплений
Способ генерации высокочастотных сигналов и устройство его реализации
Способ генерации высокочастотных сигналов и устройство его реализации
Способ определения координат и параметров движения источников радиоизлучений на основе анализа их взаимного расположения

