Результат интеллектуальной деятельности: Устройство формирования механического момента электромагнитом в магнитной системе ориентации космического аппарата
Вид РИД
Изобретение
Назначение
Предлагаемое изобретение относится к системе ориентации космического аппарата (КА) и может быть использовано для получения механических моментов, воздействующих на КА в условиях действия геомагнитного поля Земли.
Уровень техники
Наиболее широко известные системы, создающие внешний механический момент на КА, - системы в которых используются исполнительные органы с газореактивными соплами или микрореактивными двигателями (см. патент РФ №2271317). Эти исполнительные органы, отбрасывая холодный или горячий газ через сопло в космическое пространство, создают силу, воздействующую на аппарат. Однако поскольку запасы рабочего газа на борту космического летательного аппарата ограничены и не восполняются, то для длительного полета, особенно для малых КА (массой 50-150 кг), данная система требует больших запасов рабочего газа, приводящих к значительному увеличению массы и габаритов.
Известны системы, создающие внешний механический момент на КА, в которых не требуется наличие какого-либо расходуемого рабочего тела - это магнитные системы, работающие в условиях действия геомагнитного поля Земли. В качестве исполнительных органов в данных магнитных системах используются электромагниты, формирующие магнитные моменты, которые взаимодействуя с геомагнитным полем Земли, создают внешние управляющие механические моменты на КА (см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 9).
Магнитная система, используется, как правило, совместно с двигателями-маховиками (см. патент РФ №1839928), создающими внутренний управляющий момент (механический момент вокруг оси, параллельной оси вращения ротора двигателя-маховика), которые управляют угловым движением КА и осуществляют динамичные повороты КА. Их отличает высокая точность стабилизации, малые размеры, простота управления, а также отсутствие расходуемого рабочего тела.
В космосе на корпус КА воздействуют моменты внутренних возмущений и моменты каких-нибудь внешних возмущений (сил аэродинамического сопротивления, светового давления, гравитационных сил, воздействия метеорной пыли, магнитные и плазменные воздействия или других внешних сил), приводящих к накоплению кинетического момента двигателей-маховиков и к их насыщению. Сброс накапливаемого кинетического момента с двигателей-маховиков возможен только с помощью внешних управляющих механических моментов, воздействующих на КА и формируемых, например, электромагнитами в магнитной системе ориентации КА (см. А.Г. Иосифьян, Электромеханика в космосе. «Космонавтика, астрономия» №3, 1977 г.; патент, РФ, №2568827).
Таким образом, электромагнит является важнейшим устройством в магнитных системах управления КА, выход из строя которого приводит к выходу из строя системы ориентации КА. Поэтому к нему предъявляются повышенные требования по надежности работы с учетом ресурса КА, как правило, не менее 5-7 лет.
Наиболее близким к предлагаемому изобретению является реверсивный переключатель индуктивной нагрузки (патент РФ 2140128), взятый авторами за прототип.
Реверсивный переключатель индуктивной нагрузки содержит мостовую схему на полупроводниковых силовых элементах (четырех силовых транзисторах разной проводимости), соединенную с выходами устройства управления, и катушку индуктивности электромагнита, включенную в диагональ мостовой схемы. Электромагнит представляет собой катушку индуктивности, намотанную на сердечник, например, стержневого типа.
Устройство управления обеспечивает открывание одной диагонали транзисторного моста при сигнале на одном входе и отсутствии сигнала на втором входе, а также, аналогично, открывание второй диагонали транзисторного моста при сигнале на втором входе и отсутствии сигнала на первом входе. Причем в устройстве управления присутствует защита от короткого замыкания при сквозном включении силовых транзисторов мостовой схемы, т.е. исключается режим работы, когда обе диагонали транзисторного моста открыты.
При одной открытой диагонали транзисторного моста (вторая диагональ закрыта) через катушку индуктивности электромагнита протекает ток, создавая электромагнитом магнитный момент в одном направления, который взаимодействуя с магнитным полем Земли, создает управляющий механический момент. Аналогично, при открытой второй диагонали транзисторного моста через катушку индуктивности электромагнита протекает ток в противоположном направлении, создавая электромагнитом магнитный момент в другом направлении и, соответственно, управляющий механический момент другого направления.
Управляющий механический момент М определяется основным уравнением:

где L - вектор создаваемого магнитного момента электромагнитом; В - вектор магнитной индукции магнитного поля Земли (см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 21-22).
Недостатком устройства является отсутствие контроля непосредственно токовой цепи намагничивания катушки индуктивности электромагнита, что не позволяет достоверно контролировать штатную работу электромагнита (направление управляющего момента, обрыв катушки) и своевременное привести его в работоспособное состояние, что приводит к снижению надежности работы системы ориентации КА.
Целью предлагаемого изобретения является повышение надежности работы системы ориентации КА.
Раскрытие изобретения
Сущность предлагаемого устройства формирования механического момента электромагнитом в магнитной системе ориентации КА заключается в техническом обеспечении непосредственного контроля тока катушки индуктивности электромагнита, формировании гальванически развязанного сигнала, который служит сигналом телеметрии и сигналом управления, позволяющим обеспечить формирование требуемого направления магнитного момента электромагнита, и при возникновении внештатной ситуации, своевременно привести в работоспособное состояние магнитную систему ориентации КА путем переключения в электромагните основной катушки индуктивности на резервную и/или основного канала электронного блока формирования тока катушки индуктивности электромагнита - на резервный.
Устройство включает в себя мостовую схему на четырех силовых транзисторах разной проводимости, соединенную с выходами устройства управления, и катушку индуктивности электромагнита.
Введение в устройство двух оптронных узлов, микро ЭВМ, электронного блока резервного канала, соединенных определенным образом, позволяет повысить надежность работы системы ориентации КА путем обеспечения требуемого направления магнитного момента электромагнита.
Катушка индуктивности электромагнита может формировать магнитный поток только в двух направлениях - прямом и противоположном. Неправильное включение направления магнитного потока недопустимо, т.к. при этом формируется "неправильное" направление управляющего механического момента в результате взаимодействия с магнитным полем Земли. Воздействие данного "неправильного" направления управляющего механического момента на КА приведет к увеличению отклонений КА от требуемых заданных значений. Также не будет выполнена функция сброса кинетического момента с двигателя-маховика, в котором угловая скорость его ротора вместо того, чтобы уменьшаться, наоборот будет увеличиваться, вследствие чего может наступить режим насыщения, при котором двигатель-маховик не способен создавать управляющий механический момент на КА.
Контроль направления включения моста обеспечивается параллельно включенными оптронными узлами, а именно, в каждом направлении соответственно "включается" только один оптронный узел по направлению тока катушки индуктивности электромагнита и своим выходным сигналом (сигналом обратной связи), поступающим в микро ЭВМ, подтверждает правильность выбранного направления. В случае, если выбор направления не подтверждается (было выбрано неправильно), то микро-ЭВМ устраняет данную ошибку. Таким образом, обеспечивается высокая достоверность правильности включения направления тока катушки индуктивности электромагнита, что в целом повышает надежность работы системы ориентации.
Для повышения надежности в устройстве также предусмотрено резервирование, при этом для переключения используется релейный узел, который находится в ждущем режиме, т.е. отсутствует основной показатель ненадежности - большое количество переключений контактов.
Таким образом, благодаря введению новых существенных признаков - двух оптронных узлов, релейного узла, разъема, микро ЭВМ и резервного канала электронного блока, обеспечиваются оптимальные условия по формированию управляющего механического момента на КА для своевременного приведения в работоспособное состояние магнитной системы при возникновении внештатной ситуации, что положительно отражается на надежности работы системы ориентации.
Кроме того, электромагнит и электронный блок физически могут быть разнесены на достаточное удаление друг от друга (например, кабелем через разъем), что даст возможность принятия дополнительных мер по защите электромагнита от радиационного и других излучений, которые могут вносить погрешность в процесс управления.
Графические иллюстрации
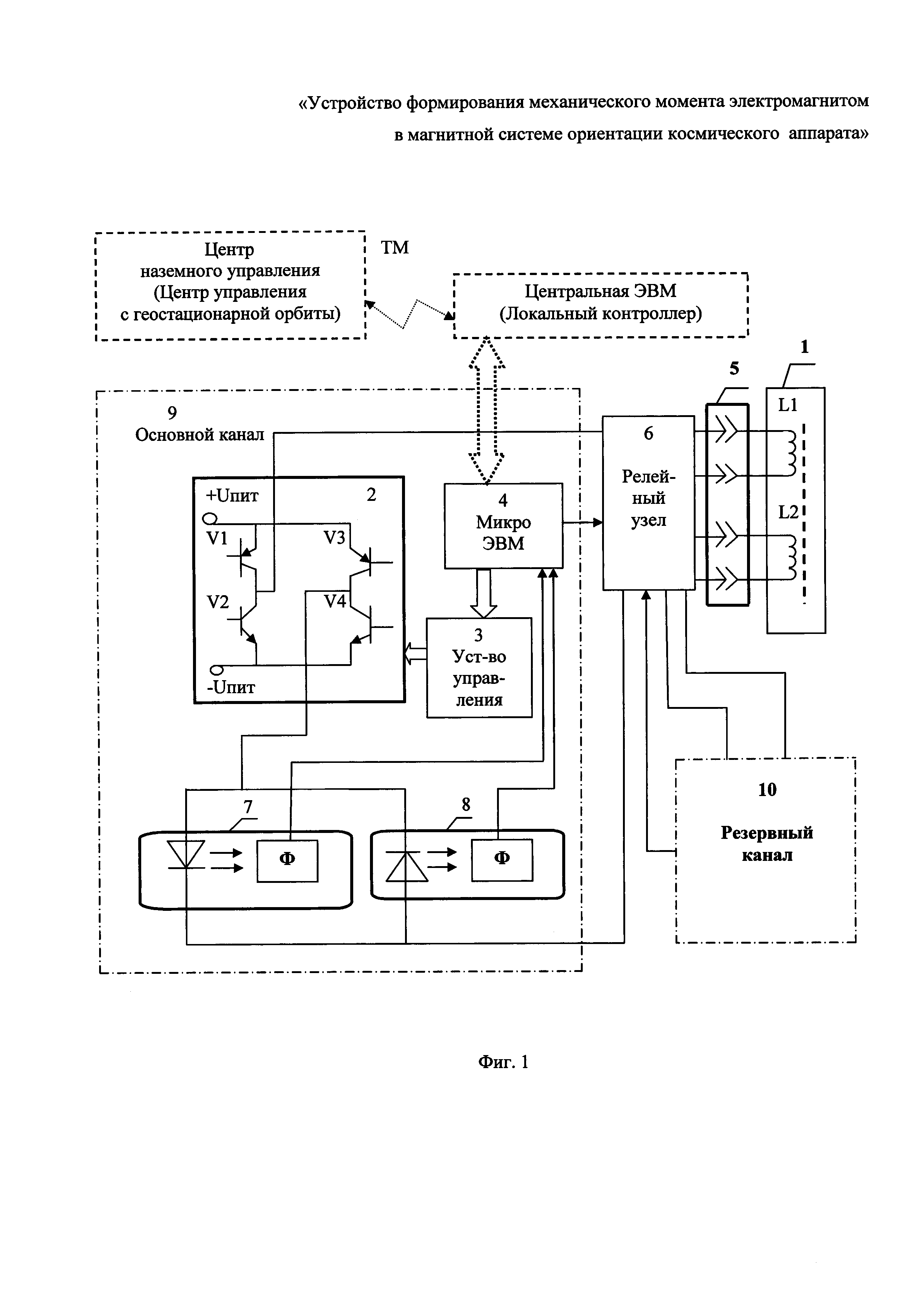
На приведенной графической фигуре приведена структурная схема устройства формирования механического момента электромагнитом в магнитной системе ориентации КА.
Осуществление изобретения
Устройство формирования механического момента электромагнитом в магнитной системе ориентации КА содержит составляющие, обозначенные позициями на Фиг. 1:
- электромагнит 1;
- мостовая схема 2;
- устройство управления 3;
- микро ЭВМ 4;
- разъем 5;
- релейный узел 6;
- оптронные узлы 7, 8.
В предлагаемом устройстве присутствуют два идентичных канала электронного устройства, обозначенных на фигуре штрихпунктирной линией - основной (9) и резервный (10).
Устройство формирования механического момента электромагнитом в магнитной системе ориентации КА, включает в себя электромагнит с катушкой индуктивности 1 и электронное устройство основного канала 9, содержащие устройство управления 3 и мостовую схему 2 на полупроводниковых силовых элементах, соединенную с выходами устройства управления 3.
В устройство дополнительно введены релейный узел 6 и разъем 5, соединяющий этот релейный узел 6 с электромагнитом 1. Катушка индуктивности электромагнита 1 состоит из двух катушек - основной L1 и резервной L2. Электронное устройство содержит два идентичных канала - основной 9 и резервный 10, каждый из которых помимо мостовой схемы 2 и устройства управления 3 содержит микро-ЭВМ 4 и два оптронных узла 7, 8. Параллельно встречно включенные светодиоды оптронных узлов одним выводом соединены с одной точкой диагонали мостовой схемы 2, другим - с релейным узлом 6, который также соединен со второй точкой диагонали мостовой схемы 2. Группа входов устройства управления 3 соединены с группой выходов микро-ЭВМ 4, отдельный выход которой соединен с входом релейного узла 6, а входы - с выходами фотоприемных устройств оптронных узлов 7, 8.
Описание работы устройства
Изначально при работе основного канала (при работе устройства включен только один канал - основной 9 или резервный 10, при этом второй выключен) к электронному блоку основного канала 9 через разъем 5 и релейный узел 6 подключена катушка индуктивности L1 электромагнита (для повышения надежности электромагнита обмотка выполнена в виде n катушек индуктивности (в устройстве показаны две катушки индуктивности L1 - основная, L2 - резервная)). В качестве электромагнитов можно использовать электромагниты стержневого типа. Например: на стержневом сердечнике круглого сечения из магнитомягкого намотаны катушки индуктивности из медного провода (которые для повышения надежности электромагнита резервируются). Катушки индуктивности конструктивно могут быть закрыты тепловой изоляцией и защищены наружным экраном от радиации и механических повреждений.
Команду на формирование магнитного момента электромагнитом 1 в заданном направлении дает микро ЭВМ 4 на основании поступающих в нее данных с магнитометра по вектору магнитной индукции магнитного поля Земли, данных с датчиков угловых скоростей, навигационных данных, командно-программной информации и т.д. Команда в виде разрешающего сигнала с выхода микро ЭВМ 4 поступает на вход устройства управления 3, которое открывает одну из диагоналей транзисторного моста мостовой схемы 2. Схема устройства управления 3 с последовательно соединенной мостовой схемой 2 представляют собой реверсивный переключатель индуктивной нагрузки, с защитой от короткого замыкания при сквозном включении силовых транзисторов мостовой схемы, описание которых приведено в прототипе.
При заданном направлении тока катушки индуктивности L1 электромагнита 1 (например, обеспечивается открытыми транзисторами V1 и V4 мостовой схемы 2) ток протекает по цепи: плюсовая шина питания - транзистор V1 - релейный узел 6 - разъем 5 - катушка индуктивности L1 - разъем 5 - релейный узел 6 - светодиод оптронного узла 8 - транзистор V4 - минусовая шина питания. При этом на выходе фотоприемного устройства Ф оптронного узла 8 формируется электрический сигнал, который, поступая в микро ЭВМ 4 в качестве сигнала обратной связи, "подтверждает" заданное (принимаем за прямое) направление тока катушки индуктивности L1 электромагнита 1 и, соответственно, направление магнитного момента, создаваемого электромагнитом, который при взаимодействии с магнитным полем Земли создает вектор управляющего механического момента на КА. В случае, если сигналом обратной связи направление не "подтверждается", то микро ЭВМ устраняет данную ошибку соответствующими сигналами на устройство управления 3.
В качестве микро-ЭВМ можно использовать, например, отечественные однокристальные микро-ЭВМ серии 1816 (микро-ЭВМ включает в себя следующие неотъемлемые элементы: микропроцессор, ОЗУ, ПЗУ, устройства ввода и вывода данных, см. патент РФ №2571728).
У всех современных КА обмен центральной ЭВМ (локальный контроллер) с микро ЭВМ осуществляется по мультиплексному каналу обмена (требование ГОСТ Р 52070-2003), а с центром наземного управления по телеметрии.
При смене направления тока катушки индуктивности L1 электромагнита 1 по разрешающему сигналу с выхода микро ЭВМ 4 устройство управления 3 открывает уже другую диагональ транзисторного моста мостовой схемы 2 (открывается транзистор V3 и V2) и ток протекает в противоположном направлении по цепи: плюсовая шина питания - транзистор V3 - светодиод оптронного узла 7 - релейный узел 6 - разъем 5 - катушка индуктивности L1 - разъем 5 - релейный узел 6 - транзистор V2 - минусовая шина питания. При этом уже на выходе фотоприемного устройства Ф оптронного узла 7 формируется электрический сигнал (сигнал обратной связи), который, поступая в микро ЭВМ 4 "подтверждает" заданное (противоположное) направление тока катушки индуктивности L1 электромагнита 1, который создает заданное (противоположное) направление магнитного момента и, соответственно, направление управляющего механического момента.
Электрические сигналы, поступающие в микро ЭВМ 4 с выхода фотоприемных устройств Ф оптронных узлов 8, 7, могут быть использованы также в качестве сигналов телеметрии (ТМ), позволяющих обеспечить своевременное переключение катушек индуктивности L1, L2 электромагнита 1 и/или электронных блоков основного и резервного каналов 9, 10.
В качестве фотоприемника в фотоприемном устройстве Ф оптронного узла 7, 8 может быть или фотодиод, или фототранзистор, или фоторезистор (пример фотоприемного устройства Ф приведен на рис. 2, см. Электронная техника в автоматике, выпуск 10, Москва, 1978 г., стр. 210).
Использование оптронного узла 8, 7 позволяет получить гальваническую развязку микро ЭВМ 4 от силовых элементов устройства - мостовой схемы 2 и электромагнита 1, что исключает их взаимовлияние и повышает надежность работы.
Итак, в предлагаемом устройстве электромагнитом создается магнитный момент как в прямом, так в противоположном направлении, а также по электрическому сигналу с выхода фотоприемного устройства Ф оптронного узла 7, 8 микро ЭВМ 4 получает информацию по:
- направлению тока намагничивания катушки индуктивности (направлению создаваемого электромагнитом магнитного момента);
- обрыву катушки индуктивности L1, L2 электромагнита 1 (при отсутствии электрического сигнала с выхода оптронного узла 7, 8);
- выходу из строя устройств основного канала электронного блока 9 (при отсутствии электрического сигнала с выхода оптронного узла 7, 8).
В зависимости от информации по возникшей внештатной ситуации, в том числе с учетом возможной неисправности электромагнита 1, а именно, межвитковых коротких замыканий катушки индуктивности L1, L2, сопровождающейся снижением вектора создаваемого магнитного момента электромагнитом 1 и, следовательно в соответствии с формулой (1) снижением управляющего механического момента на КА, микро ЭВМ 4 соответствующими сигналами (при необходимости, по сигналам с центра наземного управления или с центра управления с геостационарной орбиты) по определенному алгоритму управляет релейным узлом 6 для переключения на резервную катушку L2 электромагнита 1 и/или на резервный канал 10 электронного блока.
Высокая надежность устройства обеспечивается:
- обеспечением обратной связи по контролю направления управляющего механического момента электромагнита;
- резервированием катушки индуктивности электромагнита и электронного блока,
- разнесением электромагнита и электронного блока путем соединения через гибкий жгут;
- отсутствием на электромагните каких либо датчиков;
- использованием релейного узла в ждущем режиме только на переключение (число переключений незначительно).
Таким образом, в предлагаемом устройстве достигается оптимальный режим работы по направлению управляющего механического момента электромагнита, что в целом обеспечивает высокую надежность работы магнитной системы ориентации КА, положительно отражаясь на точности ориентации.
Устройство формирования механического момента электромагнитом в магнитной системе ориентации КА, включающее в себя электромагнит с катушкой индуктивности и электронное устройство, содержащее устройство управления и мостовую схему на полупроводниковых силовых элементах, соединенную с выходами устройства управления, отличающееся тем, что между электромагнитом и электронным устройством дополнительно введены релейный узел с разъемом для соединения с электромагнитом, причем обмотка электромагнита состоит из двух катушек индуктивности - основной и резервной, а электронное устройство содержит два идентичных канала - основной и резервный, каждый из которых помимо мостовой схемы и устройства управления содержит микро-ЭВМ и два оптронных узла, параллельно встречно включенные светодиоды которых одним выводом соединены с одной точкой диагонали мостовой схемы, другим - с релейным узлом, который также соединен со второй точкой диагонали мостовой схемы, при этом группа входов устройства управления соединена с группой выходов микро-ЭВМ, отдельный выход которой соединен с входом релейного узла, а отдельные входы - с выходами фотоприемного устройства оптронных узлов.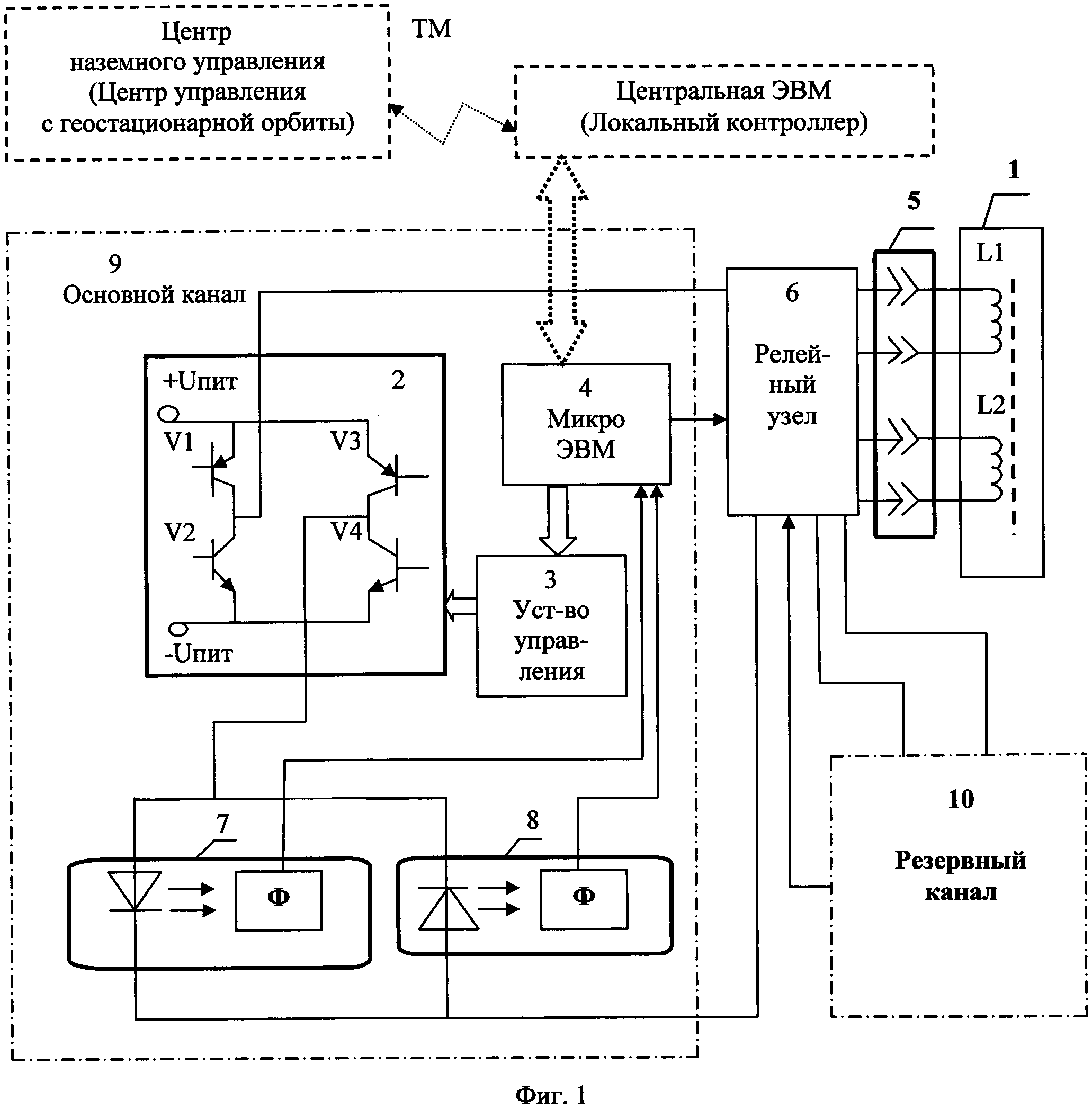
Способ ориентации космического аппарата в путевой системе координат с приводом поворота аппаратуры наблюдения наземных объектов и устройство для его осуществления
Гирокомпасная система ориентации искусственного спутника земли
Способ автоматической компенсации ошибок бесплатформенной системы ориентации в системе управления ориентацией космических аппаратов, и устройство, реализующее этот способ
Устройство для очистки биологических жидкостей
Аппарат сочетанной детоксикации крови и лимфы
Устройство управления нагревателями аппаратуры космического аппарата
Гирокомпасная система ориентации искусственного спутника земли
Способ ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса и система для его осуществления
Способ орбитального гирокомпасирования и устройство для его осуществления
Устройство детоксикации лимфы

