Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ОШИБОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ В СИСТЕМЕ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКИХ АППАРАТОВ, И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к космической технике и может быть использовано в системе управления ориентацией космических аппаратов (КА) на базе бесплатформенной системы ориентации.
Уровень техники
Аналоги систем управления ориентацией, как правило, содержат датчики углового положения, датчики угловых скоростей, вычислительные устройства или бортовые вычислительные машины и исполнительные органы (Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - М.: Наука, 1974; Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. - Машиностроение, 1974; Васильев В.Н. Системы ориентации космических аппаратов. - М.: ФГУП «НПП ВНИИЭМ», 2009).
В настоящее время в связи с совершенствованием бортовых вычислительных машин и применением высокоточных датчиков угловых скоростей в системах управления ориентацией КА используют способ управления, в котором вычисление параметров ориентации и формирование управляющих сигналов на исполнительные органы осуществляют на базе бесплатформенных систем ориентации. При этом сигналы угловых рассогласований бесплатформенных систем ориентации для определения ориентации КА могут быть получены вычислениями в вычислительных устройствах по измерениям угловой скорости с помощью датчиков угловых скоростей путем непрерывного интегрирования кинематических уравнений углового движения КА (см. Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. - М.: Наука, 1992; Пельпор Д.С. Гироскопические системы. - М.: Высшая школа, 1988).
Недостатком является необходимость внешней коррекции ошибок бесплатформенной системы ориентации, поскольку при интегрировании кинематических уравнений углового движения КА неизбежно накапливаются ошибки от погрешностей гироинерциальных датчиков угловых скоростей и погрешностей вычислений. Компенсацию ошибок бесплатформенной системы ориентации, как правило, осуществляют с использованием показаний точных датчиков астроориентации.
Известен способ ориентации КА и устройство, реализующее этот способ. по патенту на изобретение РФ №2375269. Способ включает измерение параметров углового движения КА, формирование и выдачу на исполнительные органы управляющих сигналов. При этом обеспечивают циклический расчет моментов времени последующих циклов формирования и выдачи управляющих сигналов КА. На период отсчета текущего времени включают аппаратуру ждущего и выключают аппаратуру штатного режимов работы системы ориентации. При совпадении текущего времени с расчетным временем последующего цикла включают аппаратуру штатного и выключают аппаратуру ждущего режимов работы. Измеряют параметры углового движения КА, формируют и выдают на исполнительные органы необходимые управляющие сигналы. Устройство ориентации КА может быть выполнено в виде бесплатформенной инерциальной системы управления. Оно содержит центральный блок управления, измерители угловой скорости, датчики внешней информации и исполнительные органы. В него дополнительно введены блоки управления измерителей угловой скорости, блоки управления датчиками внешней информации и программно-временное устройство. Данные блоки и устройство соединены друг с другом и остальными элементами системы управления в соответствии с реализуемым способом.
Недостатком является цикличность работы в штатном режиме, то есть не обеспечивается нужная точность ориентации при непрерывном режиме эксплуатации.
Наиболее близким техническим решением является способ калибровки гироинерциальных измерителей бесплатформенной системы ориентации КА по патенту РФ №2092402, выбранный авторами за прототип. Способ заключается в калибровочных разворотах КА вокруг осей крена и тангажа с визированием заданных астроориентиров перед началом каждого разворота и последующем вычислении погрешности блока гироинерциальных измерителей, составленного из однокомпонентных датчиков угловой скорости, а также компенсации влияния постоянных уходов гироинерциальных измерителей (датчиков угловой скорости) как составляющей погрешности в их выходном сигнале. При этом калибровочные развороты осуществляют путем трех последовательных плоских вращений КА вокруг осей крена, рыскания и тангажа связанной с объектом ориетации системы координат на заданный угол, с визированием двух заданных астроориентиров с помощью датчиков астроориентации перед началом и после окончания каждого из калибровочных разворотов КА, после чего по измерительной информации, полученной в результате астровизирования, и информации, полученной с помощью бесплатформенной системы ориентации, оценивают величины погрешностей датчиков угловой скорости.
Система, реализующая этот способ, содержит блок датчиков астроориентации, запоминающее устройство, предназначенное для хранения каталога астроориентиров, вычислительное устройство определения астроориентации КА, блок гироинерциальных измерителей, составленный из трех однокомпонентных датчиков угловой скорости, бесплатформенную инерциальную систему, осуществляющую интегрирование кинематических уравнений по информации об абсолютной угловой скорости объекта ориентации, исполнительные органы, осуществляющие калибровочные развороты космического аппарата вокруг осей крена, рысканья и тангажа связанной с КА системой координат.
Недостатком является необходимость проведения достаточно продолжительных по времени калибровочных вращений КА. Учитывая, что параметры гироскопов в течение эксплуатации могут изменяться, например, вследствие деградации, то калибровочные развороты необходимо регулярно повторять, при этом в результате не обеспечивается необходимая точность ориентации в непрерывном режиме эксплуатации КА. Кроме того, потеря времени на калибровочные вращения может создавать значительные неудобства целевого использования КА и, кроме того, приводить в этих режимах к повышенному энергопотреблению системой управления ориентацией КА.
Раскрытие изобретения
Целью заявляемого изобретения является обеспечение высокой точности управления ориентацией КА при непрерывном режиме эксплуатации КА за счет постоянной автоматической компенсации ошибки.
Поставленная цель достигается тем, что осуществляют непрерывную автоматическую компенсацию ошибок бесплатформенной системы ориентации, вызванных низкочастотными составляющими систематических погрешностей датчиков угловых скоростей, которые являются основными источниками погрешностей.
Применение данного способа обеспечивает необходимую точность систем управления ориентацией КА, при этом, в отличие от прототипа, не требуется проведение калибровочных вращений КА, а значит увеличивается время полезного использования КА и снижается энергопотребление.
Сущность изобретения заключается в том, что предлагаемый способ автоматической компенсации ошибок бесплатформенной системы ориентации, входящей в систему управления ориентацией КА (вызванных систематическими погрешностями блока гироинерциальных измерителей, составленного из однокомпонентных датчиков угловой скорости), основан на сравнении показаний датчиков угловой скорости и блока датчиков астроориентации, установленных на общем базовом основании и ориентированных определенным образом относительно осей связанной системы координат КА. При этом используют сигнал оценки погрешности датчиков угловой скорости, который формируют путем изодромного преобразования сигнала, получаемого в результате сравнения сигналов, характеризующих угловое положение КА, измеренное блоком датчиков астроориентации, с угловым положением, вычисленным в вычислительном устройстве бесплатформенной системы ориентации по показаниям датчиков угловой скорости. Сигнал оценки погрешности датчиков угловой скорости на выходе изодромного звена формируют во время подключения к управлению блока датчиков астроориентации, запоминанают его на время отключения от управления блока датчиков астроориентации и одновременно осуществляют непрерывное вычитание полученного сигнала оценки погрешности датчиков угловой скорости из показаний датчиков угловой скорости, в составе которых отражены абсолютная угловая скорость КА и ошибка, вызванная систематическими погрешностями датчиков угловой скорости.
Таким образом, автоматически и непрерывно компенсируют ошибки бесплатформенной системы ориентации, вызванные систематическими погрешностями датчиков угловой скорости, как во время подключения к управлению, так и во время отключения от управления блока датчиков астроориентации.
Поставленная цель реализуется устройством системы управления ориентацией КА путем включения в ее состав дополнительных вычислительных модулей с соответствующими связями для обеспечения непрерывной автоматической компенсации ошибок, вызванных низкочастотными составляющими систематических погрешностей датчиков угловых скоростей.
Система управления ориентацией КА содержит бесплатформенную систему ориентации, блок датчиков астроориентации, исполнительные органы. При этом бесплатформенная система ориентации включает в себя блок гироинерциальных измерителей, составленный из однокомпонентных датчиков угловой скорости, и вычислительное устройство с интегрирующими звеньями, осуществляющее интегрирование кинематических уравнений по информации об абсолютной угловой скорости КА. Блок датчиков астроориентации содержит астровизирные устройства, запоминающее устройство, предназначенное для хранения каталога астроориентиров, и вычислительное устройство определения астроориентации КА. Дополнительно введенные в бесплатформенную систему ориентации вычислительные модули (изодромные звенья, состоящие из интегрирующего звена и линейного усилителя, включенных параллельно, сумматоры и элементы сравнения, установленные по каждой оси связанной системы координат КА) обеспечивают постоянное отслеживание отклонений, вызванных низкочастотными составляющими систематических погрешностей датчиков угловых скоростей, и компенсируют эти отклонения. Это обеспечивает высокую точность системы управления ориентацией КА. При этом не требуется проведение калибровочных вращений КА, а значит, по сравнению с прототипом, увеличивается время полезного применения КА и снижается энергопотребление.
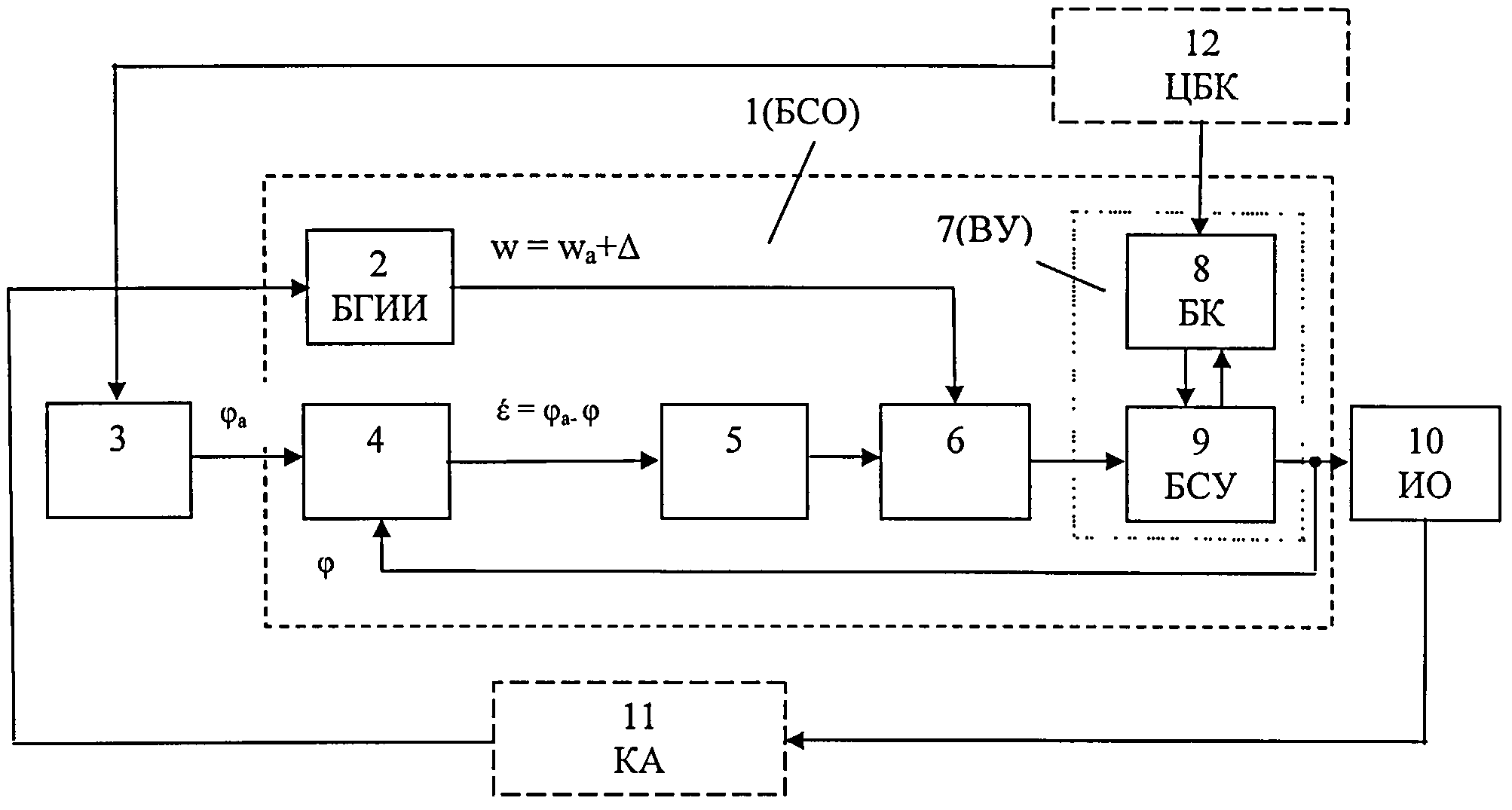
На чертежеприведена упрощенная блок-схема системы управления ориентацией КА, являющейся устройством, реализующим заявляемый способ.
Цифрами обозначены следующие элементы:
1 - бесплатформенная система ориентации (БСО);
2 - блок гироинерциальных измерителей (БГИИ);
3 - блок датчиков астроориентации;
4 - элемент сравнения;
5 - изодромное звено
6 - сумматор;
7 - вычислительное устройство (ВУ);
8 - бортовой компьютер (БК);
9 - блок согласования и команд управления (БСУ);
10 - исполнительные органы (ИО);
11 - объект регулирования (космический аппарат - КА);
12 - центральный бортовой компьютер (ЦБК)
Осуществление изобретения
Система управления ориентацией КА, представленная на чертеже, содержит бесплатформенную систему ориентации 1; блок датчиков астроориентации 3 (содержащий не показанные на рисунке астровизирные устройства, запоминающее устройство, предназначенное для хранения каталога астроориентиров, и вычислительное устройство определения астроориентации КА), а также исполнительные органы 10.
Бесплатформенная система ориентации 1 содержит блок гироинерциальных измерителей 2, составленный из трех однокомпонентных датчиков угловых скоростей, которые устанавливаются на общем базовом основании с астровизирными устройствами блока датчиков астроориентации 3 и ориентируются определенным образом относительно осей связанной системы координат КА. Также содержит последовательно соединенные элемент сравнения 4, изодромное звено 5, сумматор 6; вычислительное устройство 7 с интегрирующими звеньями (здесь вычислительное устройство 7 состоит из двух блоков: бортового компьютера 8 и блока согласования и команд управления 9). На чертеже условно показан объект регулирования - КА 11 и центральный бортовой компьютер 12, который не входит в состав системы управления ориентацией КА, но команды управления и информация с него используются в системе управления ориентацией КА в соответствии с алгоритмом ее работы.
В представленном на чертеже варианте исполнения системы управления ориентацией КА выход блока согласования и команд управления 9 вычислительного устройства 7 подключен к исполнительным органам 10 и к элементу сравнения 4, второй вход элемента сравнения 4 подключен к выходу блока датчиков астроориентации 3. Выход элемента сравнения 4 подключен к входу изодромного звена 5, выход изодромного звена 5 подключен к одному входу сумматора 6, к второму входу которого подключен выход блока гироинерциальных измерителей 2, выход сумматора 6 подключен к входу блока согласования и команд управления 9, который взаимосвязан с бортовым компьютером 8. Центральный бортовой компьютер 12 соединен с бортовым компьютером вычислительного устройства 7 и с блоком датчиков астроориентации 3.
Кроме того, на структурной схеме системы управления ориентацией КА обозначены: w - вектор угловой скорости на выходе блока гироинерциальных усилителей, wa - вектор абсолютной угловой скорости КА, Δ - вектор систематической погрешности ДУС, φа - вектор угла, измеренный блоком датчиков астроориентации, φ - вектор угла, вычисленный в бесплатформенной системе ориентации, ε - вектор сигнала рассогласования.
В представленном варианте исполнения системы управления ориентацией КА в качестве блока гироинерциальных измерителей 2 может быть применен бесплатформенный гироприбор ориентации (прибор БГО) производства НИИЭМ.
В качестве блока датчиков астроориентации 3 может быть применен звездный датчик (прибор БОКЗ-М) производства ИКИ РАН.
В качестве бортового компьютера 8 может быть применен прибор БЦВМ-К производства НИИ «Субмикрон».
В качестве блока согласования и команд управления 9 может быть применен прибор БСК производства НИИ «Субмикрон».
В качестве исполнительных органов 10 могут быть применены двигатели - маховики (приборы ДМ5-50) производства ВНИИЭМ.
Бесплатформенная система ориентации 1 может быть реализована в виде блоков бортового вычислительного устройства, в состав которых войдут с их связями элемент сравнения 4, изодромное звено 5, сумматор 6, бортовой компьютер 8 и блок согласования и команд управления 9.
При штатном функционировании системы управления ориентацией КА из центрального бортового компьютера 12 в блок датчиков астроориентации 3 и в бортовой компьютер 8 поступают команды на установку режимов ориентации, навигационные данные и другая информация для обеспечения заданного режима функционировании системы управления ориентацией. В режиме астрокоррекции (с подключенным блоком датчиков астроориентации) с блока датчиков астроориентации 3 на вход элемента сравнения 4 поступает сигнал φа, характеризующий в векторной форме угловое положение КА, измеренное блоком датчиков астроориентации. Одновременно на второй вход элемента сравнения 4 поступает сигнал φ, характеризующий в векторной форме угловое положение КА, вычисленное в блоке согласования и команд управления 9 вычислительного устройства 7 путем интегрирования кинематических уравнений углового движения КА. Кроме того, блок согласования и команд управления 9 осуществляет электрическое и информационное взаимодействие между датчиками и исполнительными органами в каналах управления, а реализация всех вычислительных алгоритмов, относящихся к системе управления ориентацией КА, выполняется в бортовом компьютере 8 и в блоке согласования и команд управления 9, между которыми происходит непрерывный обмен информацией. Одновременно датчики угловой скорости блока гироинерционных измерителей 2 измеряют проекции угловой скорости КА на оси связанной системы координат, и с выхода этого блока на вход сумматора 6 поступает сигнал w=wa+Δ, характеризующий в векторной форме угловую скорость КА, где w - вектор угловой скорости на выходе БГИИ 2, wa - вектор истинной угловой скорости КА, Δ - вектор систематической погрешности датчиков угловой скорости. С выхода сумматора 6 сигнал поступает на интегрирующие звенья блока согласования и команд управления 9 вычислительного устройства 7, где происходит формирование сигнала φ. Сигнал φ, как уже было отмечено выше, поступает на элемент сравнения 4 и одновременно на исполнительные органы 10. Исполнительные органы 10 воздействуют на объект регулирования (КА) 11. КА отрабатывает сигнал φ, приближая к нулю рассогласование ε=φа-φ на выходе элемента сравнения 4. Сигнал с элемента сравнения 4 поступает на изодромное звено 5. Изодромное звено 5 накапливает на выходе низкочастотную составляющую оценки погрешности датчиков угловой скорости до тех пор, пока сигнал на входе изодромного звена отличается от нуля, запоминает накопленную низкочастотную составляющую оценки датчиков угловой скорости и сохраняет ее на время работы бесплатформенной системы ориентации в режиме астрокоррекции и на время прерывания астрокоррекции. Получаемый после изодромного преобразования сигнал оценки погрешности датчиков угловой скорости затем поступает на сумматор 6, где вычитается из сигнала блока гироинерционных измерителей 2, в составе которого отражены абсолютная угловая скорость КА и ошибка, вызванная систематическими погрешностями датчиков угловой скорости. Тем самым автоматически компенсируются низкочастотные составляющие систематических погрешностей датчиков угловой скорости как во время подключения к управлению блока датчиков астроориентации, так и во время отключения от управления блока датчиков астроориентации.
Таким образом, предлагаемое устройство и способ для его реализации автоматически и непрерывно компенсируют низкочастотные составляющие систематических погрешностей датчиков угловой скорости, что приводит к повышению точности ориентации КА, при этом, в отличие от прототипа, не требуется проведения калибровочных вращений КА, и тем самым увеличивается время полезного применения КА и снижается энергопотребление.
Предлагаемые система управления ориентацией КА и способ автоматической компенсации ошибок БСО в составе системы управления ориентацией КА обладают промышленной применимостью и в настоящее время реализуются в разрабатываемой системе управления ориентацией КА, опытные образцы которой проходят испытания.
По результатам испытаний опытных образцов система управления ориентацией КА обеспечивает погрешность определения ориентации (3σ) в режиме астрокоррекции по всем осям не более 1 угл. мин, в режиме «гиропамяти» после выполнения астрокоррекции в течение 100 мин не более 1 угл. мин.
Стабилизированный электромашинный источник электропитания
Стабилизированный комбинированный источник электропитания
Способ ориентации космического аппарата в путевой системе координат с приводом поворота аппаратуры наблюдения наземных объектов и устройство для его осуществления
Гирокомпасная система ориентации искусственного спутника земли
Система жидкостного охлаждения электронного устройства
Устройство для управления цифровым частотно-регулируемым электроприводом
Устройство для очистки биологических жидкостей
Аппарат сочетанной детоксикации крови и лимфы
Гирокомпасная система ориентации искусственного спутника земли
Способ ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса и система для его осуществления
Стабилизированный электромашинный источник электропитания
Стабилизированный комбинированный источник электропитания
Способ ориентации космического аппарата в путевой системе координат с приводом поворота аппаратуры наблюдения наземных объектов и устройство для его осуществления
Гирокомпасная система ориентации искусственного спутника земли
Система жидкостного охлаждения электронного устройства
Устройство для управления цифровым частотно-регулируемым электроприводом
Устройство для очистки биологических жидкостей
Аппарат сочетанной детоксикации крови и лимфы
Гирокомпасная система ориентации искусственного спутника земли
Способ ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса и система для его осуществления

