Результат интеллектуальной деятельности: СПОСОБ ОРБИТАЛЬНОГО ГИРОКОМПАСИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области космической техники и может использоваться при создании и эксплуатации гироскопической системы ориентации (ГСО) для около круговых орбит ИСЗ.
Наиболее близким аналогом может служить техническое решение, представленное в заявке №2012121440/28 от 25.05.2012 (патент №2498216). В нем показана ГСО в составе: двухкоординатный построитель местной вертикали (ПМВ), трехосный гироскопический блок датчиков угловых скоростей (БДУС) и вычислитель системы. ГСО строит приборную орбитальную систему координат (приборную ОСК) с частичной автокомпенсацией погрешностей системы по двум каналам - крена и курса.
Целью предложения является создание ГСО повышенной точности путем трехканальной более полной автокомпенсации ее инструментальных погрешностей без привлечения дополнительных внешних средств и без ухудшения динамики ее переходных процессов.
Согласно предложению в части способа орбитального гирокомпасирования (ОГК) наряду с известными приемами, включающими измерение углов крена и тангажа ИСЗ с помощью ПМВ и угловых скоростей по каналам крена, курса и тангажа с помощью БДУС, построение приборной орбитальной системы координат (приборной ОСК) путем интегрирования в вычислителе измеренных угловых скоростей с предварительной их коррекцией в каналах крена и курса по разности углов крена ПМВ и крена выходного канала вычислителя, и в канале тангажа по разности углов тангажа ПМВ и тангажа выходного канала вычислителя, и с введением расчетных проекций программной орбитальной угловой скорости (ΩП) ИСЗ на оси крена, курса и тангажа, а также формирование поправок на инструментальные погрешности системы,
вводятся новые признаки:
измеренные углы ПМВ по крену и тангажу и угловые скорости БДУС по крену и тангажу приводят из связанной системы координат (ССК) в приборную ОСК с использованием первого преобразователя координат (ПК1), управляемого по заданному курсу с учетом запаздывания фактического поворота ИСЗ относительно заданной программы, компенсируют в вычислителе измеренную угловую скорость поворота ее программным значением, а выходные углы вычислителя по крену и тангажу для угловой стабилизации ИСЗ приводят из приборной ОСК в ССК с использованием второго управляемого по курсу преобразователя ПК2;
во время формирования поправок совершают круговой поворот ИСЗ по курсу с заданной скоростью и с остановками при курсовых углах: 90°, 180°, минус 90° и 0° каждый раз на время, кратное периоду орбитального движения, с сохранением режима гирокомпасирования и угловой стабилизации ИСЗ;
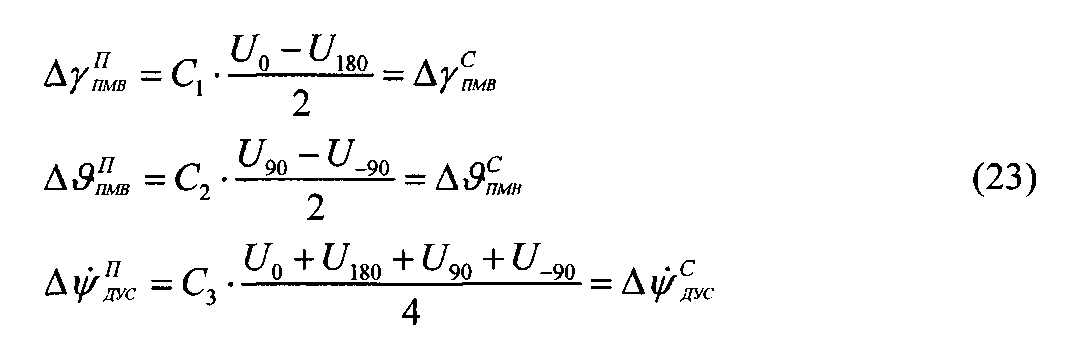
в течение каждой из четырех остановок измеряют разности углов крена ПМВ в приборной ОСК (после ПК1) и крена выходного сигнала вычислителя (до ПК2): U90, U180, U-90, U0 фильтруют от шумовых составляющих, вырабатывают их средние значения и запоминают, а формирование поправок на погрешности системы по крену ΔγП, тангажу ΔϑП и курсу  выполняют в соответствии с выражениями:
выполняют в соответствии с выражениями:

где:  C3=K2+ΩП - масштабные коэффициенты;
C3=K2+ΩП - масштабные коэффициенты;
K2 - передаточный коэффициент в курсовом контуре вычислителя;
ΩП - программная угловая скорость, соответствующая орбитальной угловой скорости ΩO ИСЗ,
после чего вводят эти поправки в выходные сигналы ПМВ крена, ПМВ тангажа и БДУС по курсовому каналу соответственно и приводят систему в исходное состояние.
В части устройства для осуществления способа по п. 1 наряду с известными блоками и функциональными связями ГСО:
последовательно соединенные ПМВ по каналу крена, первый сумматор, первое усилительно-преобразующее устройство (УПУ), второй сумматор, второй вход которого подключен к БДУС по каналу крена, и первый интегратор, выход которого подключен ко второму входу первого сумматора и к выходу ГСО по каналу крена;
также последовательно соединенные второе УПУ, вход которого подключен параллельно со входом первого УПУ, третий сумматор, второй вход которого подключен е выходу БДУС по каналу курса, и второй интегратор, выход которого подключен через первый задатчик ΩП к третьему входу второго сумматора и к выходу ГСО по каналу курса;
также последовательно соединенные ПМВ по каналу тангажа, четвертый сумматор, третье УПУ, пятый сумматор, второй вход которого подключен к БДУС по каналу тангажа, и третий интегратор, выход которого подключен ко второму входу четвертого сумматора и к выходу ГСО по каналу тангажа; причем выход первого интегратора подключен через второй задатчик ΩП к третьему входу третьего сумматора, третий вход пятого сумматора подключен к третьему задатчику ΩП; выходы БДУС по каналам крена, курса и тангажа подключены к соответствующим выходам ГСО по угловым скоростям, а также программно-временной задатчик (ПВЗ) режимов работы системы,
- вводятся новые блоки и связи: первый преобразователь координат (ПК1), первый и второй, третий и четвертый входы и соответствующие четыре выхода которого включены в выходные цепи ПМВ по каналам крена и тангажа и в выходные цепи БДУС по каналам крена и тангажа соответственно, второй ПК2, первый и второй входы и первый и второй выходы которого включены в соответствующие выходные цепи ГСО по каналам крена и тангажа; задатчик программных курсовых углов (ЗКУ), выход которого подключен через запаздывающее устройство (ЗУ), например апериодическое звено, к управляющим входам ПК1 и ПК2 и через первое дифференцирующее устройство подключен к четвертому входу третьего сумматора; задатчик проекций (ЗП) ΩП на оси крена и тангажа ИСЗ, входы которого подключены к выходу ЗКУ и к третьему задатчику ΩП, а два выхода ЗП - по крену и тангажу - подключены к шестому и седьмому сумматорам, введенным в соответствующие каналы ГСО по угловым скоростям крена и тангажа ИСЗ; восьмой сумматор, введенный в выходную цепь ГСО по угловой скорости курса, ко второму входу которого подключен выход ЗКУ через второе дифференцирующее устройство;
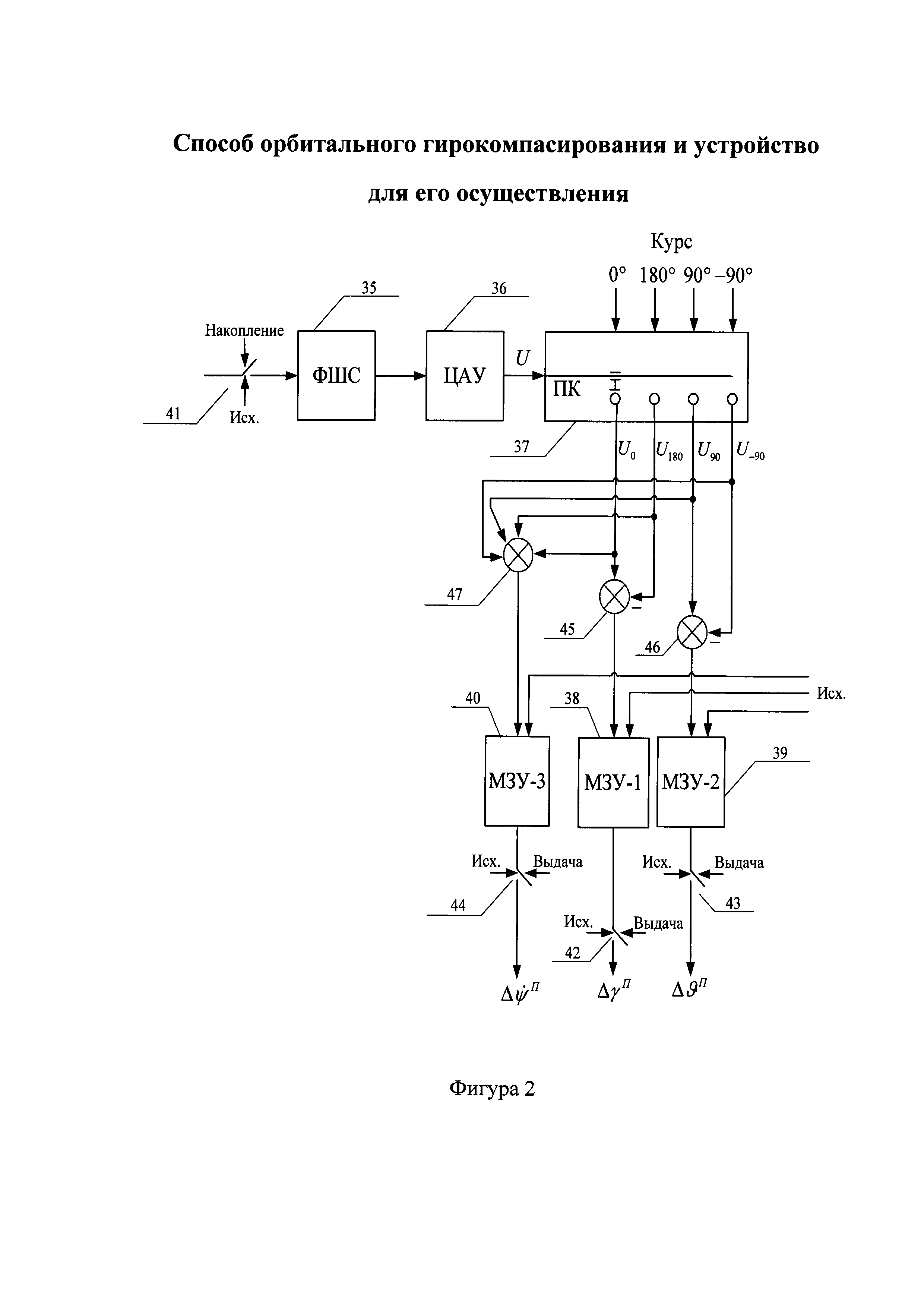
также трехкоординатный блок формирования поправок (БФП) по каналам крена, тангажа и курса системы, первый вход которого подключен к выходу первого сумматора, со второго по пятнадцатый входы подключены к выходам ПВЗ соответственно по каналам «Исходное» - семь команд,
«Курс 0», «Курс 180», «Курс 90» и «Курс -90», «Накопление» и «Выдача» поправок - три команды;
первый, второй и третий выходы БФП подключены соответственно к девятому сумматору, введенному в выходную цепь ПМВ по каналу крена, к десятому сумматору, введенному в выходную цепь ПМВ по каналу тангажа, и к одиннадцатому сумматору, введенному к входу ДУС курса.
При этом БФП выполнен в виде:
- последовательно соединенных первого коммутатора, подключенного к первому входу БФП, фильтра шумовых сигналов (ФШС), цифроаналогового устройства (ЦАУ) и переключателя каналов (ПК); также последовательно соединенных двенадцатого сумматора, первый и второй входы которого подключены к соответствующим выходам ПК по каналам «Курс 0» и «Курс 180», первого масштабирующе-запоминающего устройства (МЗУ-1) и второго коммутатора, выход которого подключен к первому выходу БФП;
последовательно соединенных тринадцатого сумматора, первый и второй входы которого подключены соответственно к выходам ПК по каналам «Курс 90» и «Курс -90», второго МЗУ-2 и третьего коммутатора, выход которого подключен ко второму выходу БФП;
последовательно соединенных четырнадцатого сумматора, с первого по четвертый входы которого подключены к соответствующим четырем выходам ПК, третьего МЗУ-3 и четвертого коммутатора, выход которого подключен к третьему выходу БФП;
семь входов БФП по каналам «Исходное» подключены к управляющим входам на размыкание первого, второго, третьего, четвертого коммутаторов и к первому, второму и третьему МЗУ на обнуление;
вход БФП по каналу «Накопление» подключен к управляющему входу первого коммутатора на замыкание,
три входа БФП по каналам «Выдача» подключены к соответствующим управляющим входам второго, третьего и четвертого коммутаторов на замыкание,
причем алгоритм формирования поправок соответствует выражению (1).
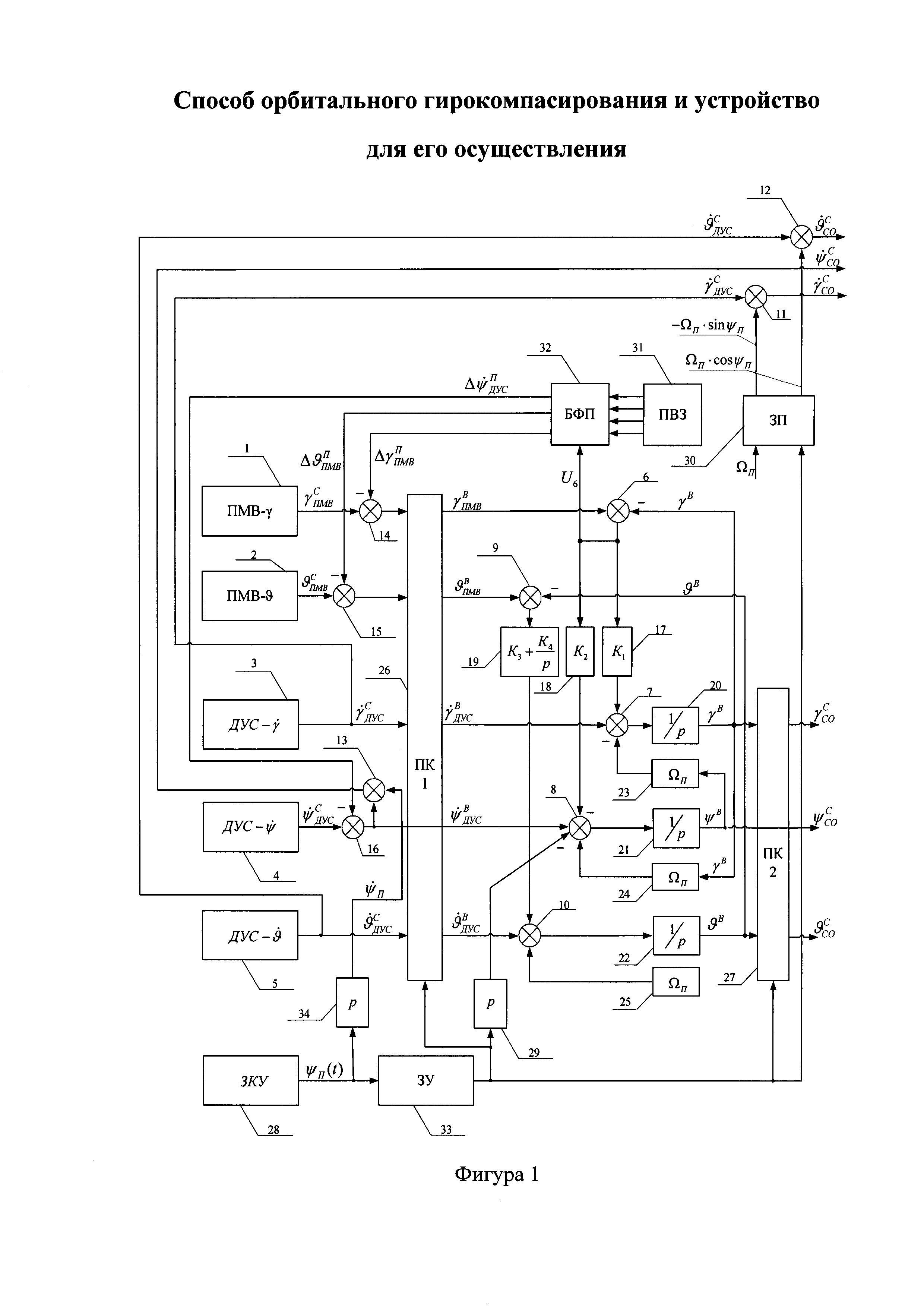
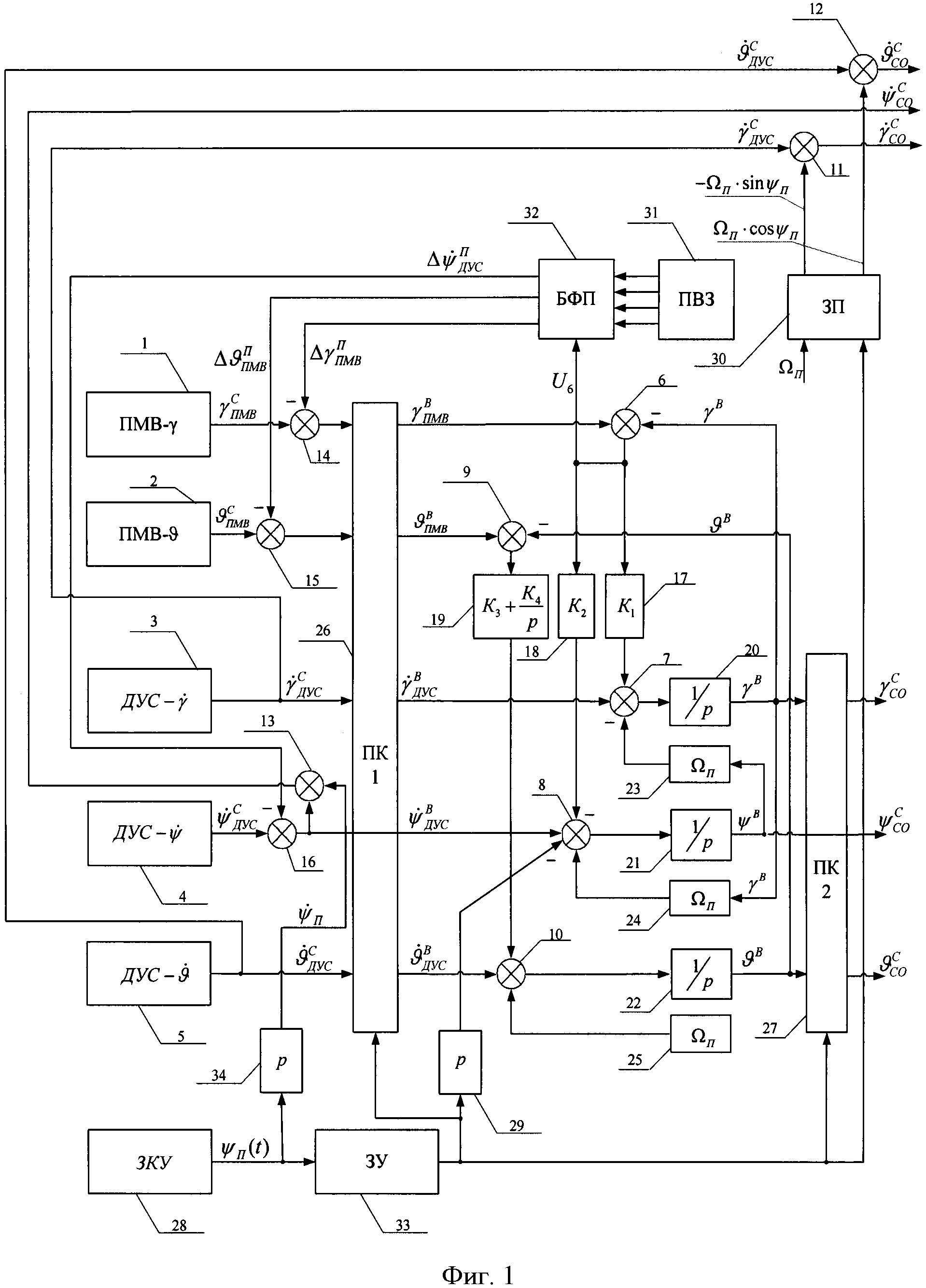
На фигуре 1 представлена структурно-функциональная схема системы; на фигуре 2 представлена схема входящего в систему трехканального блока формирования поправок БФП.
На фигуре 1 обозначено:
1, 2 - инфракрасный построитель местной вертикали по каналам крена ПМВ-γ и тангажа ПМВ-ϑ соответственно;
3, 4, 5 - датчики угловых скоростей по каналам крена  , курса
, курса  и тангажа
и тангажа  , входящие в состав трехкоординатного блока БДУС;
, входящие в состав трехкоординатного блока БДУС;
6-16 - с первого по одиннадцатый сумматоры соответственно;
17, 18 - первое и второе усилительно-преобразующие устройства (УПУ) с передаточными коэффициентами K1, К2 соответственно;
19 - третье УПУ - изодромное устройство - параллельно включенные усилительно-преобразующее устройство с коэффициентом К3 и интегратор с коэффициентом К4, вход которого подключается по внешней команде, например, от ПВЗ;
20-22 - первый, второй и третий интеграторы соответственно;
23-25 - первый, второй и третий задатчики программной орбитальной угловой скорости соответственно;
26, 27 - первый и второй преобразователи координат ПК1 и ПК2;
28 - задатчик программных курсовых углов (ЗКУ);
29 - первое дифференцирующее устройство;
30 - задатчик программных проекций (ЗП) орбитальной угловой скорости по осям крена и тангажа ИСЗ;
31 - программно-временной задатчик (ПВЗ) режимов работы системы;
32 - трехкоординатный блок формирования поправок(БФП) по крену, курсу и тангажу;
33 - запаздывающее устройство (ЗУ);
34 - второе дифференцирующее устройство;
 ,
,  - углы крена и тангажа, фиксируемые ПМВ в связанной с корпусом ИСЗ системе координат ССК;
- углы крена и тангажа, фиксируемые ПМВ в связанной с корпусом ИСЗ системе координат ССК;
 ,
,  - углы крена и тангажа ПМВ, приведенные с помощью ПК1 к приборной ОСК вычислителя, номинально совмещенной с приборной ОСК;
- углы крена и тангажа ПМВ, приведенные с помощью ПК1 к приборной ОСК вычислителя, номинально совмещенной с приборной ОСК;
 ,
,  ,
,  - угловые скорости ИСЗ, формируемые ДУС по крену, курсу и тангажу соответственно, относительно ССК;
- угловые скорости ИСЗ, формируемые ДУС по крену, курсу и тангажу соответственно, относительно ССК;
 ,
,  - угловые скорости, формируемые ДУС крена и ДУС тангажа, приведенные с помощью ПК1 к приборной ОСК; при этом угловая скорость по каналу курса (без ПК1) соответствует угловой скорости
за вычетом угловой скорости
- угловые скорости, формируемые ДУС крена и ДУС тангажа, приведенные с помощью ПК1 к приборной ОСК; при этом угловая скорость по каналу курса (без ПК1) соответствует угловой скорости
за вычетом угловой скорости  ;
;
 , ΨП(t) - угловая скорость и угол программного курсового поворота ИСЗ, задаваемого в функции времени;
, ΨП(t) - угловая скорость и угол программного курсового поворота ИСЗ, задаваемого в функции времени;
ΩП - программная орбитальная угловая скорость; ее номинальное значение равно среднему за виток орбиты значению фактической орбитальной скорости Ω0;
γВ, ΨВ, ϑВ - выходные углы вычислителя ГСО по крену, курсу и тангажу соответственно относительно приборной орбитальной системы координат;
 ,
,  - выходные углы ГСО по крену и тангажу после ПК2 соответственно, приведенные к связанной с ИСЗ системе координат ССК;
- выходные углы ГСО по крену и тангажу после ПК2 соответственно, приведенные к связанной с ИСЗ системе координат ССК;
 - выходной сигнал ГСО по курсу, минующий ПК2;
- выходной сигнал ГСО по курсу, минующий ПК2;
U6 - выходной сигнал вычислителя с сумматора 6.
На фигуре 2 обозначено:
35 - фильтр шумовых сигналов (ФШС);
36 - цифроаналоговое устройство (ЦАУ);
37 - переключатель каналов (ПК);
38-40 - масштабирующе-запоминающие устройства соответственно по крену МЗУ-1, по тангажу МЗУ-2 и по курсу МЗУ-3;
41-44 - с первого по четвертый коммутаторы соответственно;
45-47 - с двенадцатого по четырнадцатого сумматоры соответственно; U90, U180, U-90, U0 - выходные сигналы, сформированные ЦАУ при соответствующих углах ИСЗ: 0°, 180°, 90°, -90°;
ΔγП, ΔϑП,  - поправки к выходным сигналам ПМВ по крену и тангажу и ДУС курса соответственно;
- поправки к выходным сигналам ПМВ по крену и тангажу и ДУС курса соответственно;
Интегратор изодромного устройства УПУ 18 подключается по входу по внешней команде в установившемся режиме ГСО и отключается также по входу при динамических режимах системы с запоминанием и выдачей накопленной информации.
Фильтр шумовых сигналов 35 (см. фигуру 2) выполняется, например, в виде цифрового или аналогового апериодического звена:

с постоянной времени, например Τ=1 с (уточняется для конкретного ПМВ).
Алгоритм работы ЦАУ соответствует выражению:

где XBX, U - входной и выходной сигналы ЦАУ;
n - число замеров входного сигнала в течение заданного времени, кратного периоду орбитального движения.
В преобразователе координат ПК1 реализуются алгоритмы:
В преобразователе координат ПК2 реализуются алгоритмы:

Примечание. Вместе с преобразованием параметров, приведенных в (4) и (5), аналогично преобразуются и их составляющие:  ,
,  ,
,  ,
,  ,
,  ,
,  , и составляющие:
, и составляющие:  ,
,  .
.
По каналу курса вне преобразователей координат ПК1 и ПК2:

Задатчик 30 проекций ΩП на оси крена и тангажа ИСЗ вырабатывает поправки к выходным сигналам ГСО по угловой скорости:

Выходные сигналы ГСО по угловым скоростям минуют ПК1 и ПК2 и соответствуют выражениям (см. фигуру 1):
В данной схемной реализации шумовые составляющие сигналов ПМВ не проникают в скоростные каналы системы угловой стабилизации ИСЗ.
Для удобства дальнейшего изложения все элементы системы, изображенные на фигуре 1, между ПК1 и ПК2 (без ПВЗ 31 и БФП 32) назовем «вычислителем ГСО».
Элементы трехкоординатного блока БФП 32: ФШС, ЦАУ, ПК, МЗУ, коммутаторы и сумматоры (см. фигуру 2), а также элементы: ПК1 26, ПК2 27, ЗКУ 28, ЗП 30 (см. фигуру 1) - построены на базе широко используемых элементов электронной техники.
Работа ГСО в соответствии с заявленным способом совершается следующим образом.
1. ГСО в начале орбитального полета включается в традиционный режим трехосного орбитального гирокомпасирования ОГК без курсовых программных поворотов и без задействования элементов автокомпенсации погрешностей системы. ГСО строит приборную ОСК, номинально совмещенную с текущей ОСК, и при работе системы угловой стабилизации ИСЗ соответствующие строительные оси ССК корпуса ИСЗ с датчиками первичной информации: ПМВ и БДУС O- номинально совмещены с приборной ОСК и текущей ОСК.
Формирование выходных сигналов ГСО по крену и курсу осуществляется (см. фигуру 1) путем интегрирования соответствующих выходных сигналов ДУС крена и ДУС курса с предварительной их коррекцией сигналами разности углов крена ПМВ и выходного сигнала вычислителя ГСО по крену. Причем первичной информацией, поступающей в вычислитель ГСО об отклонении оси чувствительности ДУС крена, совмещенной с продольной осью ИСЗ от плоскости орбиты по курсу, является составляющая ДУС крена, равная ΩO·sinΨИСЗ. Знак этой проекции соответствует знаку угла отклонения ИСЗ по курсу от плоскости орбиты. Формирование выходного сигнала ГСО по тангажу осуществляется путем интегрирования выходного сигнала ДУС тангажа с предварительной коррекцией его сигналом разности углов ПМВ по тангажу и выходного сигнала вычислителя ГСО по тангажу. Задатчики 23, 24, 25 программной орбитальной угловой скорости ΩП обеспечивают компенсацию влияния проекций текущей орбитальной угловой скорости ΩO на соответствующие оси ДУС-ов для приведения приборной ОСК к текущей ОСК. Устойчивое состояние ГСО соответствует нулевому курсу и горизонтальному положению ИСЗ по крену и тангажу при орбитальном движении ИСЗ.
2. При курсовых программных поворотах строительные оси ИСЗ с датчиками первичной информации: ПМВ и БДУС - расходятся с осями приборной ОСК вычислителя, совмещенной с текущей ОСК. Для предотвращения потери устойчивости системы измеренные углы ПМВ и угловые скорости БДУС по крену и тангажу приводят из отклоненной ССК в неотклоненную приборную ОСК с использованием преобразователя координат ПК1 26. ПК1 работает в соответствии с алгоритмами (4), и вычислитель ГСО продолжает устойчиво работать, так же как и до курсового поворота. Для приборной ОСК при любом курсовом положении ИСЗ угол крена  и угловая скорость крена ИСЗ
и угловая скорость крена ИСЗ  соответствуют отклонению вертикальной оси ИСЗ перпендикулярно плоскости орбиты, а по тангажу - в плоскости орбиты.
соответствуют отклонению вертикальной оси ИСЗ перпендикулярно плоскости орбиты, а по тангажу - в плоскости орбиты.
Второй преобразователь координат ПК227, работающий синхронно с ПК1, обеспечивает преобразование выходных сигналов вычислителя из его приборной ОСК в связанную отклоненную по курсу систему координат для исполнительных органов угловой стабилизации ИСЗ по соответствующим осям крена и тангажа.
В соответствии со схемой (см. фигуру 1) в режиме курсового поворота с задатчика 28 программных курсовых углов выдается курсовой сигнал ΨП(t), например, со скоростью 1°/с, который через дифференцирующее звено 34 и сумматор 13 вместе с сигналом  поступает на выход ГСО по угловой скорости. Система угловой стабилизации ИСЗ отрабатывает этот скоростной сигнал с определенным запаздыванием. Одновременно по сигналу ЗКУ 28 с учетом запаздывания в ЗУ 33 выполняется курсовое управление ПК1 и ПК2, а также формирование программной угловой скорости с помощью дифференцирующего устройства 29, которая компенсирует в сумматоре 8 составляющую угловой скорости
поступает на выход ГСО по угловой скорости. Система угловой стабилизации ИСЗ отрабатывает этот скоростной сигнал с определенным запаздыванием. Одновременно по сигналу ЗКУ 28 с учетом запаздывания в ЗУ 33 выполняется курсовое управление ПК1 и ПК2, а также формирование программной угловой скорости с помощью дифференцирующего устройства 29, которая компенсирует в сумматоре 8 составляющую угловой скорости  в составе сигнала ДУС курса, поступающего в вычислитель. В результате этого работа вычислителя по устойчивому построению приборной ОСК продолжается без влияния программного поворота.
в составе сигнала ДУС курса, поступающего в вычислитель. В результате этого работа вычислителя по устойчивому построению приборной ОСК продолжается без влияния программного поворота.
При остановке курсового поворота вычислитель ГСО продолжает строить, поддерживать, приборную ОСК, совмещенную с текущей ОСК при повернутом по курсу ИСЗ и выдавать информацию для угловой стабилизации ИСЗ относительного его повернутого положения. В данном случае фактическое устойчивое положение ИСЗ по курсу соответствует углу:

где ΨИСЗ - угол отклонения ИСЗ по курсу относительного устойчивого повернутого положения на заданный угол ΨΠ; в номинальном режиме при отсутствии погрешностей системы угол ΨΒ стремится к нулевому значению.
Формирование выходных сигналов ГСО, соответствующих угловым скоростям ИСЗ (8), относительно ССК выполняется по сигналам ДУС-ов с введением поправок (7) по каналам крена и тангажа, компенсирующих проекции вектора ΩО на оси чувствительности ДУС-ов при любых курсовых углах ИСЗ, с помощью задатчика ЗП 30 и сумматоров 6 и 7. По курсовому каналу ДУС вводимый через сумматор (13) сигнал  обеспечивает курсовой поворот ИСЗ.
обеспечивает курсовой поворот ИСЗ.
3. Для формирования поправок на инструментальные погрешности системы выполняют круговой курсовой поворот ИСЗ по программным сигналам задатчика ЗКУ 28 с заданной скоростью и с остановками при курсовых углах 90°, 180°, минус 90° и 0° каждый раз на время, кратное периоду орбитального движения, с сохранением режима орбитального гирокомпасирования и угловой стабилизации ИСЗ.
4. Формирование каждой из трех поправок на инструментальные погрешности системы выполняют в течение указанных четырех остановок путем измерения разности углов ПМВ крена в приборной ОСК (после ПК1) и крена выходного сигнала вычислителя (до ПК2) на выходе сумматора 6 (см. фигуру 1), фильтрации этой разности от шумовых составляющих с помощью фильтра шумовых сигналов 35 (см. фигуру 2) по алгоритму (2), выработки их среднего значения с помощью ЦАУ 36 по алгоритму (3), распределения их с помощью переключателя каналов 37 и сумматоров 45, 46, 47 по входам масштабирующе-запоминающих устройств МЗУ-1, МЗУ-2, МЗУ-3, в которых эти разности углов масштабируются и запоминаются в качестве поправок в соответствии с выражениями (1).
5. Введение сформированных поправок (1) из МЗУ в систему выполняют с помощью управляемых коммутаторов 42, 43, 44 поочередно или одновременно к выходам соответствующих приборов (см. фигуру 1):
ΔγП - к выходу ПМВ крена через сумматор 14;
ΔϑП - к выходу ПМВ тангажа через сумматор 15;
 - ко второму входу сумматора 16.
- ко второму входу сумматора 16.
Приведение системы в исходное состояние по курсовому угловому положению может выполняться до или после введения поправок путем обнуления в ЗКУ выдаваемого курсового угла.
После введения сформированных поправок (в виде ступенчатого воздействия) вычислитель ГСО отрабатывает их в течение времени переходного процесса системы, и дальнейшая ориентация ИСЗ продолжается с повышенной точностью.
Приведем математическое обоснование работоспособности ГСО.
1) Линеаризованные уравнения выходных сигналов вычислителя ГСО (см. фигуру 1) имеют вид:
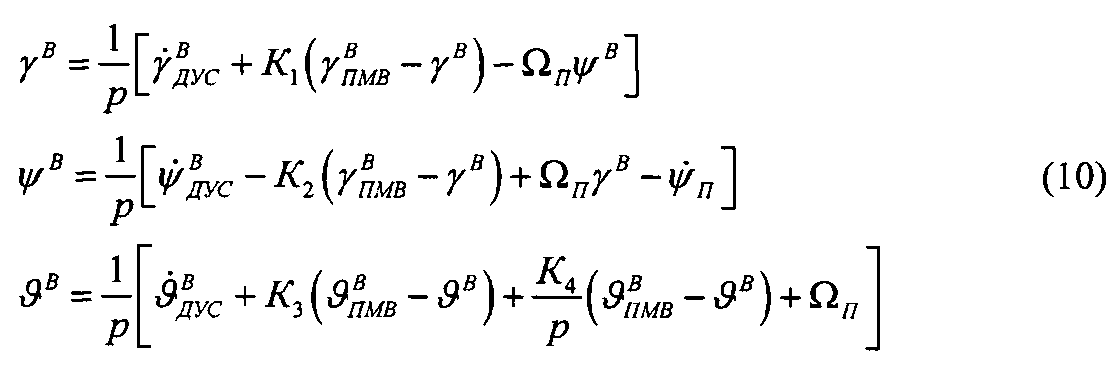
Наименования параметров системы приведены на стр. 5-8. Приведение сигналов ПМВ и ДУС по крену и тангажу из ССК в приборную ОСК для вычислителя ГСО с помощью ПК1 показано в уравнениях (4). Во втором уравнении (10) программная угловая скорость  компенсируется соответствующей отрабатываемой скоростью
компенсируется соответствующей отрабатываемой скоростью  в составе сигнала
в составе сигнала  , фиксируемого в курсовом ДУС (4).
, фиксируемого в курсовом ДУС (4).
Элементы автокомпенсации погрешностей ГСО (блок БФП, подключенный к выходу сумматора 6 и ко входам сумматоров 14, 15, 16) рассматриваются как самостоятельный контур, не оказывающий влияния на динамику ГСО, так как его разовые выходные сигналы вводятся по программе в виде постоянных величин.
2) Первые два уравнения (10) взаимосвязаны перекрестными связями - ΩП·ΨΒ и ΩП·γΒ, поэтому они рассматриваются совместно.
По правилу Крамера таблица (матрица) этих уравнений имеет вид:
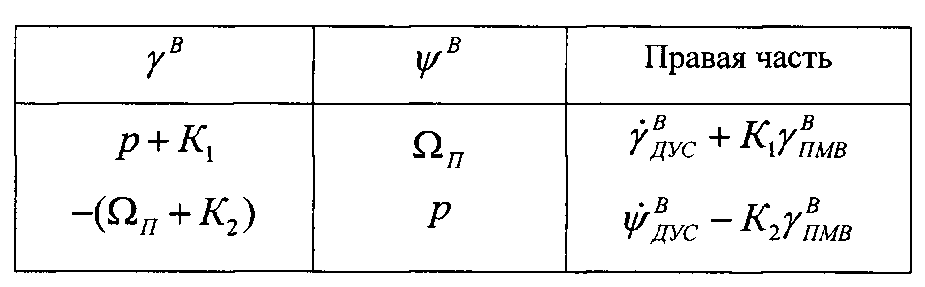
Главный определитель системы:

Система устойчива при положительных коэффициентах главного определителя системы, например при  ,
,  ,
,  .
.
Частные определители системы по крену  и по курсу
и по курсу  , а также искомые углы γВ и ΨВ равны:
, а также искомые углы γВ и ΨВ равны:
Решение третьего уравнения по тангажу системы (10) имеет вид:

3) Угловые параметры, приведенные в уравнениях (12) и (13), соответствуют выражениям:
где  ,
,  ,
,  ,
,  ,
,  - постоянные составляющие инструментальных погрешностей приборов ПМВ и БДУС, приведенные ко входу вычислителя ГСО в приборную ОСК, в соответствии с уравнениями (4) для ПК1 и уравнением (6) по курсовому каналу;
- постоянные составляющие инструментальных погрешностей приборов ПМВ и БДУС, приведенные ко входу вычислителя ГСО в приборную ОСК, в соответствии с уравнениями (4) для ПК1 и уравнением (6) по курсовому каналу;
 - составляющая угловой скорости программного поворота ИСЗ, фиксируемая курсовым ДУС-ом; в установившемся режиме эта скорость компенсируется угловой скоростью
- составляющая угловой скорости программного поворота ИСЗ, фиксируемая курсовым ДУС-ом; в установившемся режиме эта скорость компенсируется угловой скоростью  задаваемого курсового угла поворота ИСЗ.
задаваемого курсового угла поворота ИСЗ.
В номинальном режиме 
При подстановке выражений (14) и (15) в уравнения (12) и (13) получим выходные углы вычислителя ГСО по крену, курсу и тангажу относительно приборной ОСК. В установившемся режиме (при р=0) эти углы равны:
где первые члены правой части уравнений характеризуют углы повернутого по курсу корпуса ИСЗ относительно приборной ОСК, а вторые члены - погрешности определения этих углов.
4) Преобразование сигналов γΒ и ϑВ в сигналы в ССК  ,
,  для передачи их в систему угловой стабилизации ИСЗ выполняется с помощью второго ПК2 по алгоритмам (5).
для передачи их в систему угловой стабилизации ИСЗ выполняется с помощью второго ПК2 по алгоритмам (5).
По курсовому каналу без ПК2 (см. фигуру 1):  .
.
В соответствии с уравнениями (4), (14), и (16) после преобразований получим:
При этом в соответствии с (9) фактический курсовой угол ИСЗ в ССК равен:
Конкретные выходные сигналы ГСО при ΨП=0° и при повернутом положении ИСЗ на заданный курсовой угол, например ΨП=90°, имеют следующий вид.
При ΨП=0°:
При ΨП=90°:
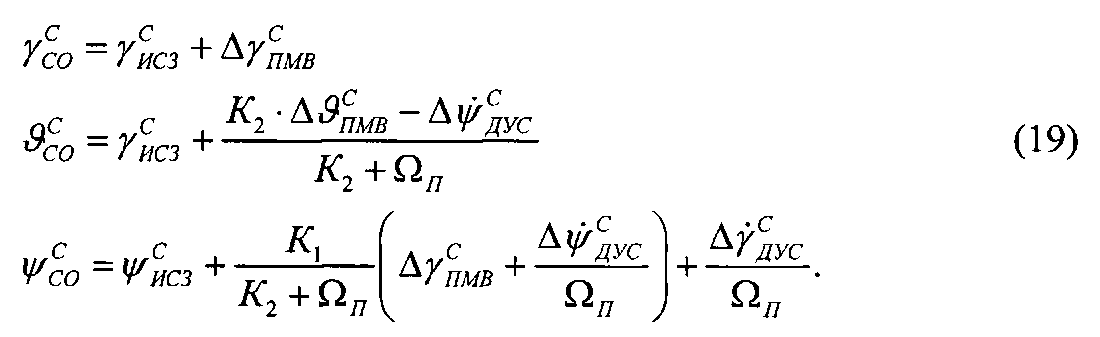
Аналогичные выражения углов ГСО можно получить при любых других программных курсовых углах.
Следует отметить, что обозначения и полярности выходных сигналов ГСО по курсу и после ПК2 по крену и тангажу (18) и (19) соответствуют углам ИСЗ в ССК.
Так как в соответствии с конструкторской документацией погрешности обоих каналов ПМВ по модулю равны и погрешности трех каналов БДУС по модулю тоже равны, то и суммарные расчетные значения погрешностей ГСО при курсовых поворотах сохраняются.
5) Формирование и введение поправок на постоянные составляющие погрешностей ПМВ и ДУС курса (автокомпенсация) выполняется следующим образом.
Исходной информацией для поправок является сигнал U разности углов крена ПМВ  на входе вычислителя ГСО и крена системы γВ на выходе вычислителя:
на входе вычислителя ГСО и крена системы γВ на выходе вычислителя:
С учетом (14) и (16) приведенная разность сводится к выражению:

Этот сигнал в БФП 32 после фильтрации (2), осреднения (3), коммутации по каналам в зависимости от установленной величины заданного курсового угла ИСЗ при замере U, а также с учетом преобразования координат (4) и при соответствии сигнала  сигналу
сигналу  в установившемся режиме принимает выражения:
в установившемся режиме принимает выражения:
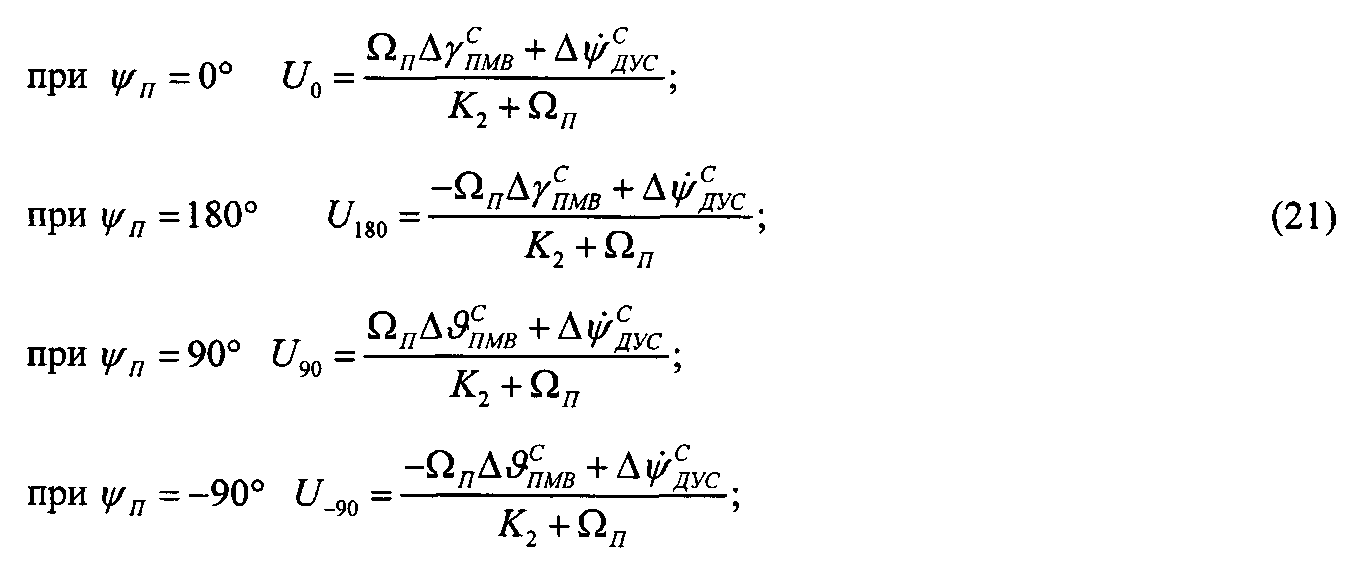
Соответствующее суммирование этих сигналов (21) и их масштабирование с коэффициентами

позволит получить искомые поправки на выходе БФП, равные соответствующим погрешностям ПМВ и ДУС курса в ССК:
Введение их с обратными знаками в выходные сигналы ПМВ по крену и тангажу и ДУС курса приводит к обнулению постоянных составляющих погрешностей этих приборах:
 в составе уравнений (14) и, соответственно, к обнулению их в приборной ОСК (после ПК1). При этом выходные сигналы (16) вычислителя ГСО освобождаются от погрешностей:
в составе уравнений (14) и, соответственно, к обнулению их в приборной ОСК (после ПК1). При этом выходные сигналы (16) вычислителя ГСО освобождаются от погрешностей:  ,
,  ,
,  и принимают вид:
и принимают вид:
Соответственно освободятся от указанных погрешностей выходные сигналы (17, 18, 19) системы в ССК для системы угловой стабилизации ИСЗ.
Приведем числовой пример, показывающий повышение точности ГСО при реализации предложения.
Пусть:
- постоянные составляющие инструментальных погрешностей ПМВ по крену и по тангажу составляют 6 угл.мин;
- погрешность выстави вертикальной оси ПМВ относительно осей чувствительности гироскопов БДУС, действие которой эквивалентно погрешностям ПМВ, равна 5 угл.мин по обоим каналам;
- собственный дрейф гироскопов БДУС равен 0,2 град/час;
- коэффициенты коррекции системы равны: К1=0,01 1/сек; К2=0,02 1/сек;
- угловая скорость орбитального движения равна: ΩП=ΩО=0,001 1/сек.
Тогда в соответствии с уравнениями (16) погрешности системы без введения поправок равны:
 ;
;  ;
;  .
.
С введением поправок расчетные инструментальные погрешности (24) сокращаются до величин:
 ;
;  .
.
При этом следует отметить, что практически автокомпенсация может быть реализована со своей погрешностью, например до 5% от компенсируемых величин, и кроме инструментальных погрешностей существуют еще методические погрешности системы.
Таким образом, решена поставленная цель повышения точности гироскопической системы ориентации ИСЗ по трем каналам путем внутренних структурных преобразований без привлечения дополнительных источников внешней информации.
Одновременно показан вариант решения сопутствующей задачи о программных поворотах ИСЗ с заданной скоростью на любые курсовые углы в интересах бортовой научной аппаратуры, а также для коррекции высоты и наклона плоскости орбиты ИСЗ при сохранения режима и точности работы системы.


Бесплатформенный орбитальный гирокомпас с произвольной курсовой ориентацией космического аппарата
Способ ориентации космического аппарата в путевой системе координат с приводом поворота аппаратуры наблюдения наземных объектов и устройство для его осуществления
Гирокомпасная система ориентации искусственного спутника земли
Устройство управления положением космического аппарата в пространстве с использованием орбитального гирокомпаса
Способ автоматической компенсации ошибок бесплатформенной системы ориентации в системе управления ориентацией космических аппаратов, и устройство, реализующее этот способ
Способ обнаружения морских целей
Способ технического контроля и диагностирования бортовых систем беспилотного летательного аппарата с поддержкой принятия решений и комплекс контрольно-проверочной аппаратуры с интеллектуальной системой поддержки принятия решений для его осуществления
Способ проверки адресности стыковки трубопроводов системы наддува баков жидкостных ракет шахтного базирования
Способ терморегулирования приборного отсека космического аппарата
Способ тепловакуумных испытаний космического аппарата
Бесплатформенный орбитальный гирокомпас с произвольной курсовой ориентацией космического аппарата
Способ ориентации космического аппарата в путевой системе координат с приводом поворота аппаратуры наблюдения наземных объектов и устройство для его осуществления
Гирокомпасная система ориентации искусственного спутника земли
Устройство управления положением космического аппарата в пространстве с использованием орбитального гирокомпаса
Способ автоматической компенсации ошибок бесплатформенной системы ориентации в системе управления ориентацией космических аппаратов, и устройство, реализующее этот способ
Способ обнаружения морских целей
Способ технического контроля и диагностирования бортовых систем беспилотного летательного аппарата с поддержкой принятия решений и комплекс контрольно-проверочной аппаратуры с интеллектуальной системой поддержки принятия решений для его осуществления
Способ проверки адресности стыковки трубопроводов системы наддува баков жидкостных ракет шахтного базирования
Способ терморегулирования приборного отсека космического аппарата
Способ тепловакуумных испытаний космического аппарата

