Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОМОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОМОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления для электромоторного транспортного средства и к способу управления для электромоторного транспортного средства.
Уровень техники
[0002] Традиционно известно устройство управления рекуперативным тормозом для электротранспортных средств, содержащее средство задания, допускающее любое данное задание рекуперативной тормозной силы электромотора и рекуперацию электромотора посредством рекуперативной тормозной силы, заданной посредством средства задания (см. JP8-79907A).
Сущность изобретения
[0003] Тем не менее, технология в JP8-79907A имеет следующую проблему. Если рекуперативная тормозная сила, заданная посредством средства задания, является большой, вибрация в продольном направлении кузова транспортного средства может формироваться, когда электротранспортное средство замедляется посредством заданной рекуперативной тормозной силы, и скорость становится нулевой.
[0004] Цель настоящего изобретения заключается в том, чтобы предоставлять технологию, которая уменьшает формирование вибрации в продольном направлении кузова транспортного средства при остановке электромоторного транспортного средства за счет рекуперативной тормозной силы.
[0005] Устройство для управления электротранспортным средством согласно варианту осуществления заключается в том, что устройство управления для электромоторного транспортного средства, использующего электромотор в качестве источника приведения в движение и выполненного с возможностью замедляться посредством рекуперативной тормозной силы из электромотора, определяет рабочую величину нажатия педали акселератора, вычисляет оцененное значение возмущающего крутящего момента и определяет или оценивает компонент сопротивления, не связанный с градиентом, из состояния транспортного средства. Устройство управления для электромоторного транспортного средства корректирует оцененное значение возмущающего крутящего момента согласно определенному или оцененному компоненту сопротивления, не связанному с градиентом. Электромотор управляется на основе значения команды управления крутящим моментом электромотора. Когда рабочая величина нажатия педали акселератора равна или меньше предварительно определенного значения, и электромоторное транспортное средство находится в момент времени непосредственно перед остановкой транспортного средства, значение команды управления крутящим моментом электромотора сходится к оцененному значению скорректированного возмущающего крутящего момента в сочетании с уменьшением скорости вращения электромотора.
[0006] Ниже подробно описываются варианты осуществления настоящего изобретения и преимущества настоящего изобретения вместе с прилагаемыми чертежами.
Краткое описание чертежей
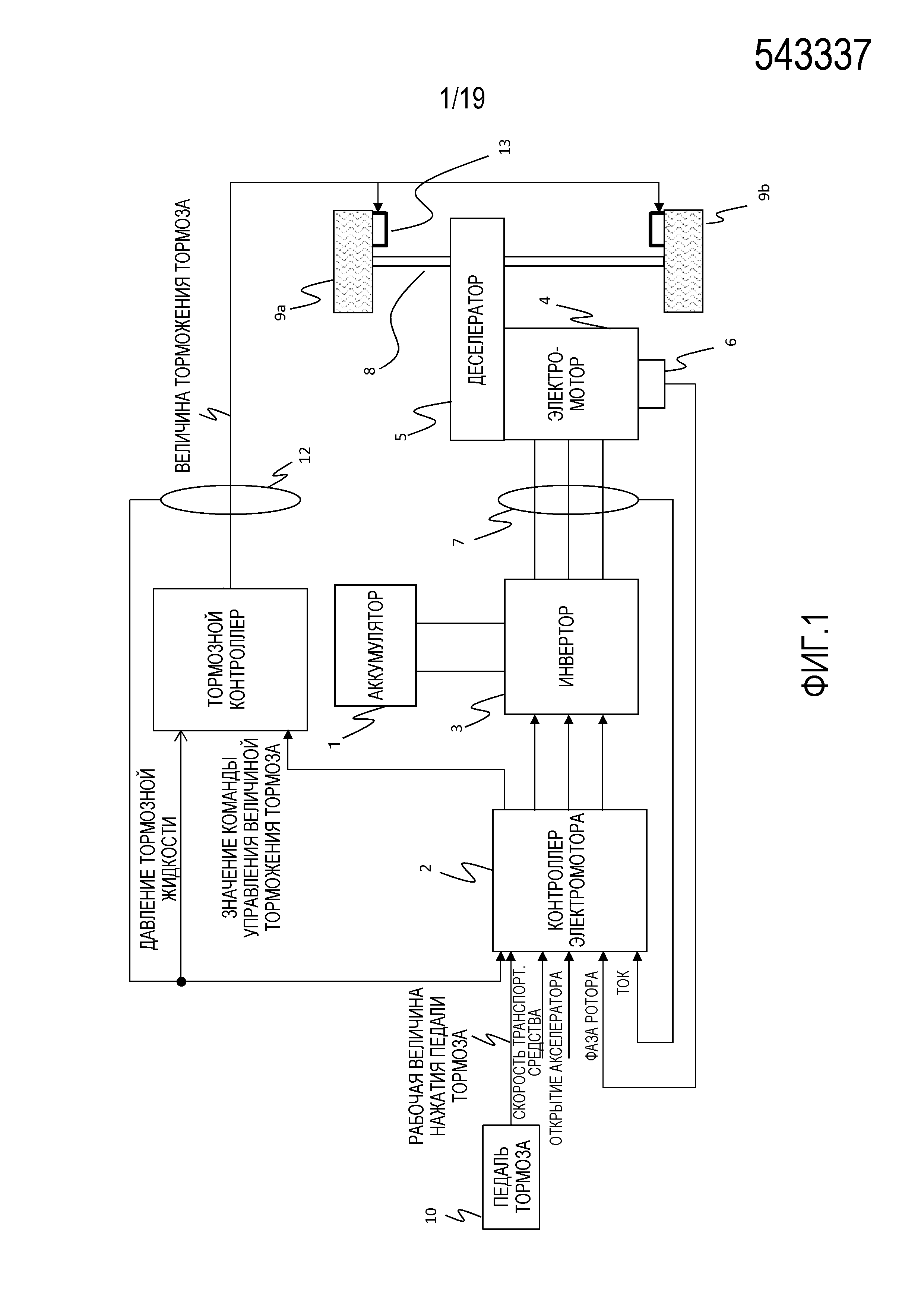
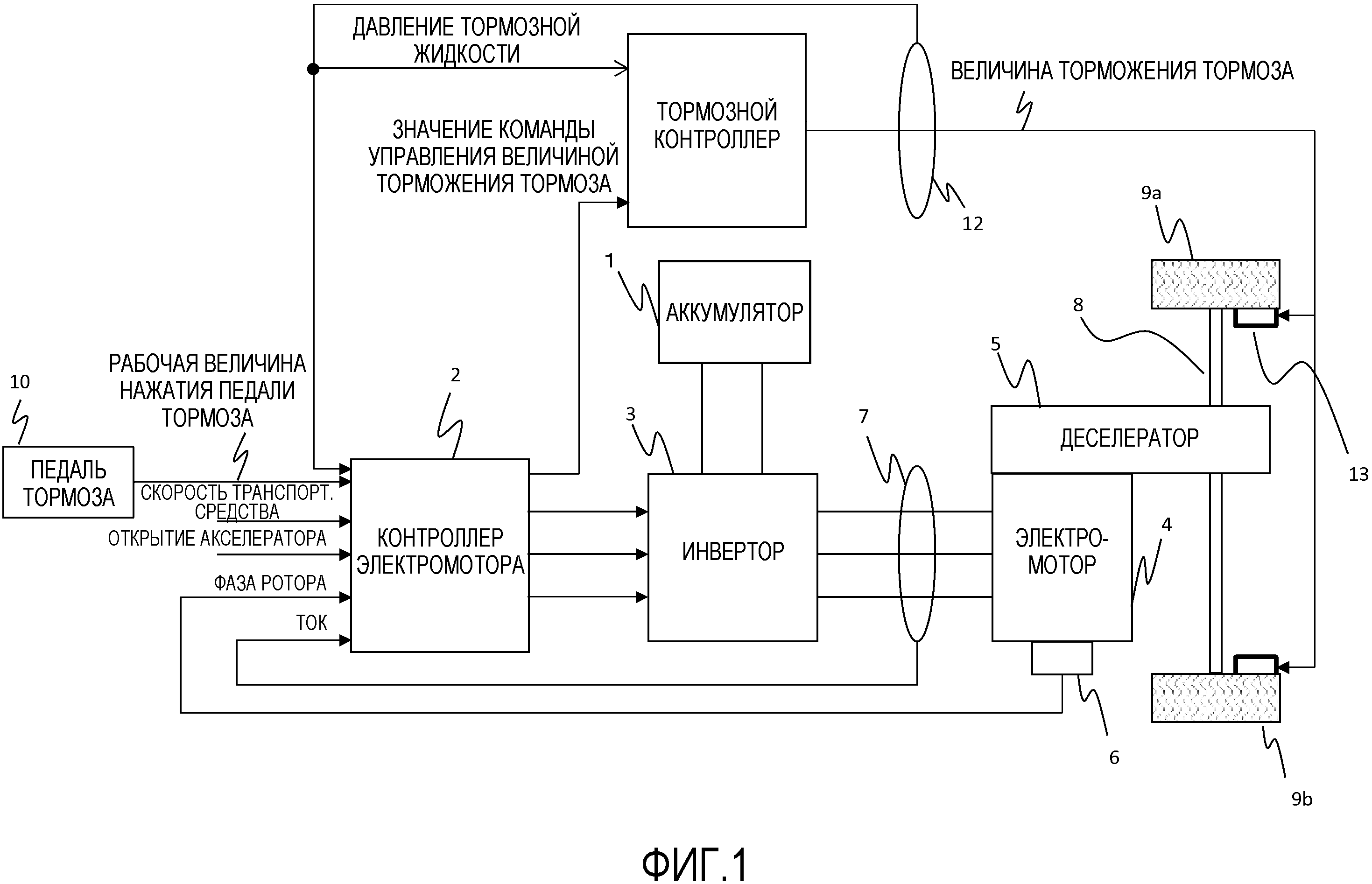
[0007] Фиг. 1 является блок-схемой, иллюстрирующей основную конфигурацию электротранспортного средства с устройством управления для электромоторного транспортного средства по первому варианту осуществления.
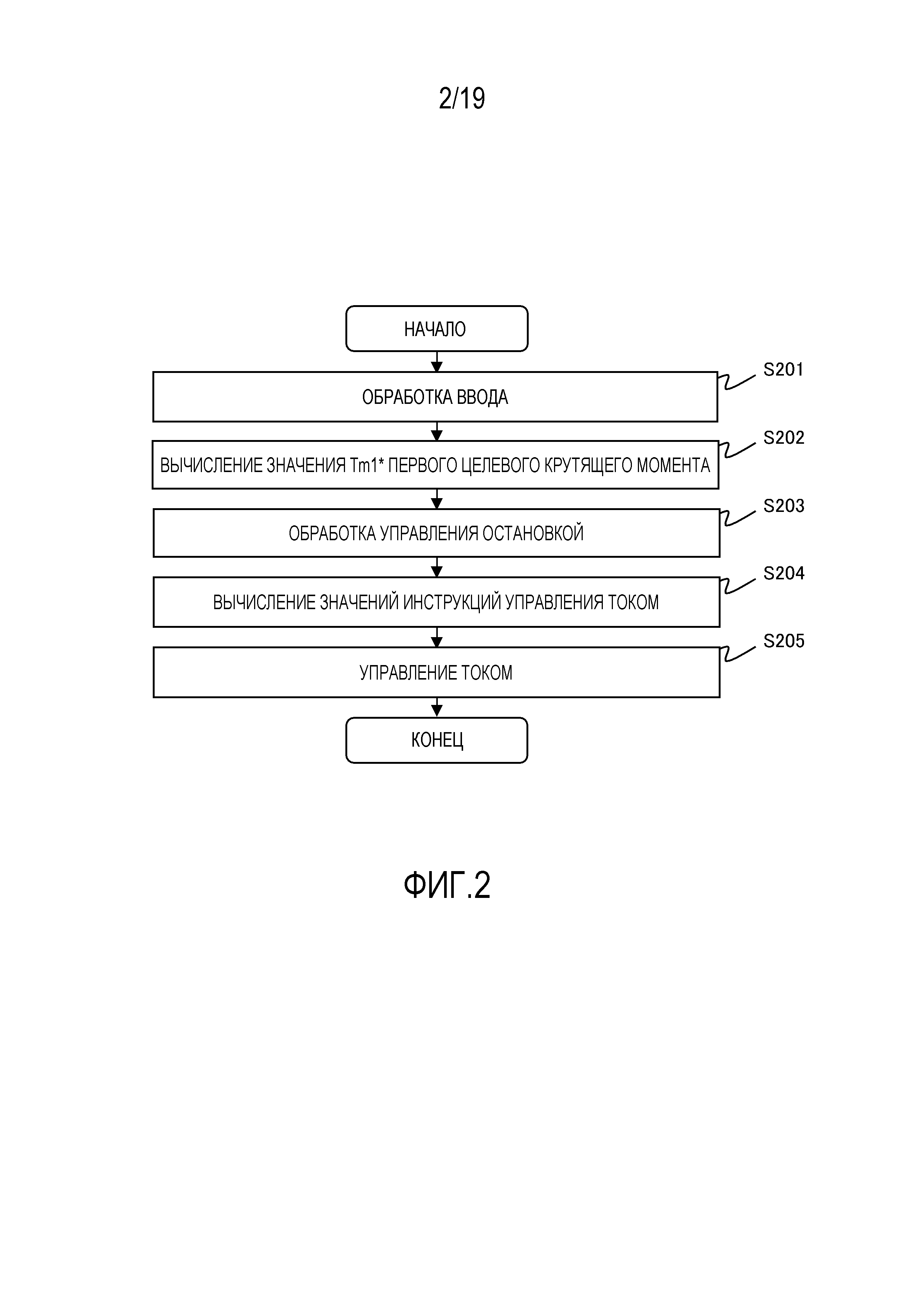
Фиг. 2 является последовательностью операций процессов для управления током электромотора, выполняемого посредством контроллера электромотора, содержащего устройство управления для электромоторного транспортного средства по первому варианту осуществления.
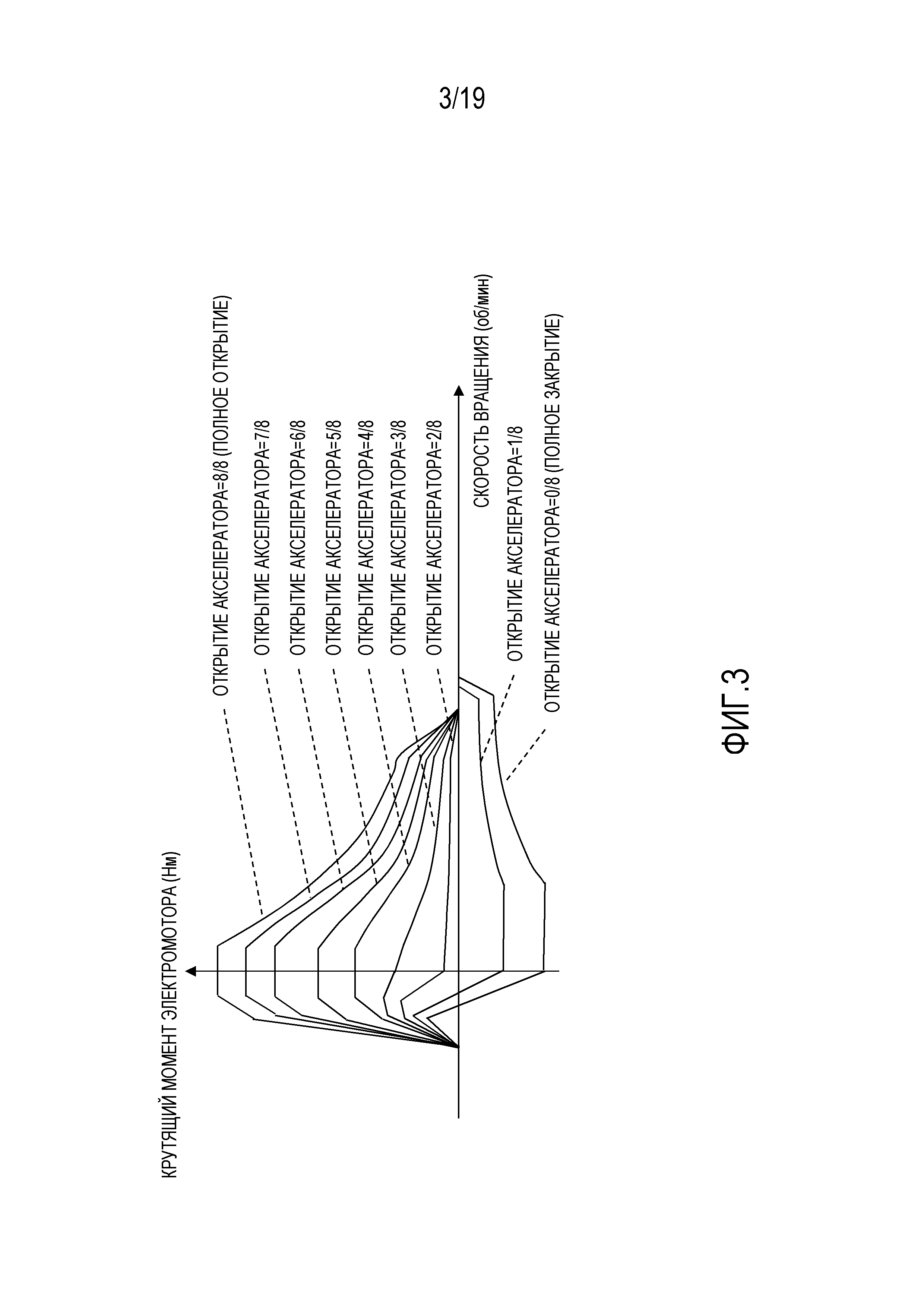
Фиг. 3 является схемой, иллюстрирующей пример таблицы позиций акселератора (степеней открытия акселератора) и крутящих моментов.
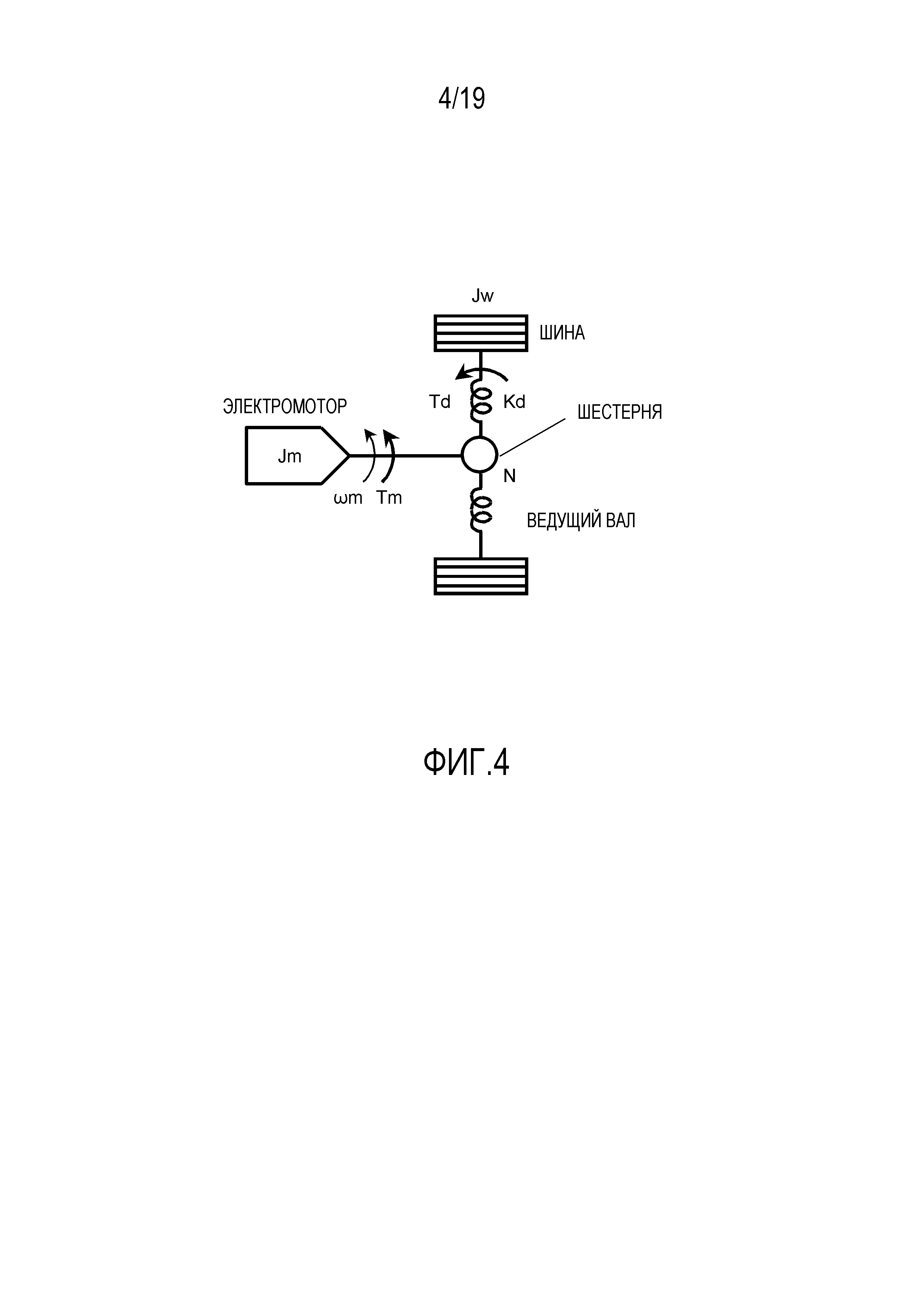
Фиг. 4 является схемой, моделирующей систему трансмиссии для передачи движущей силы транспортного средства.
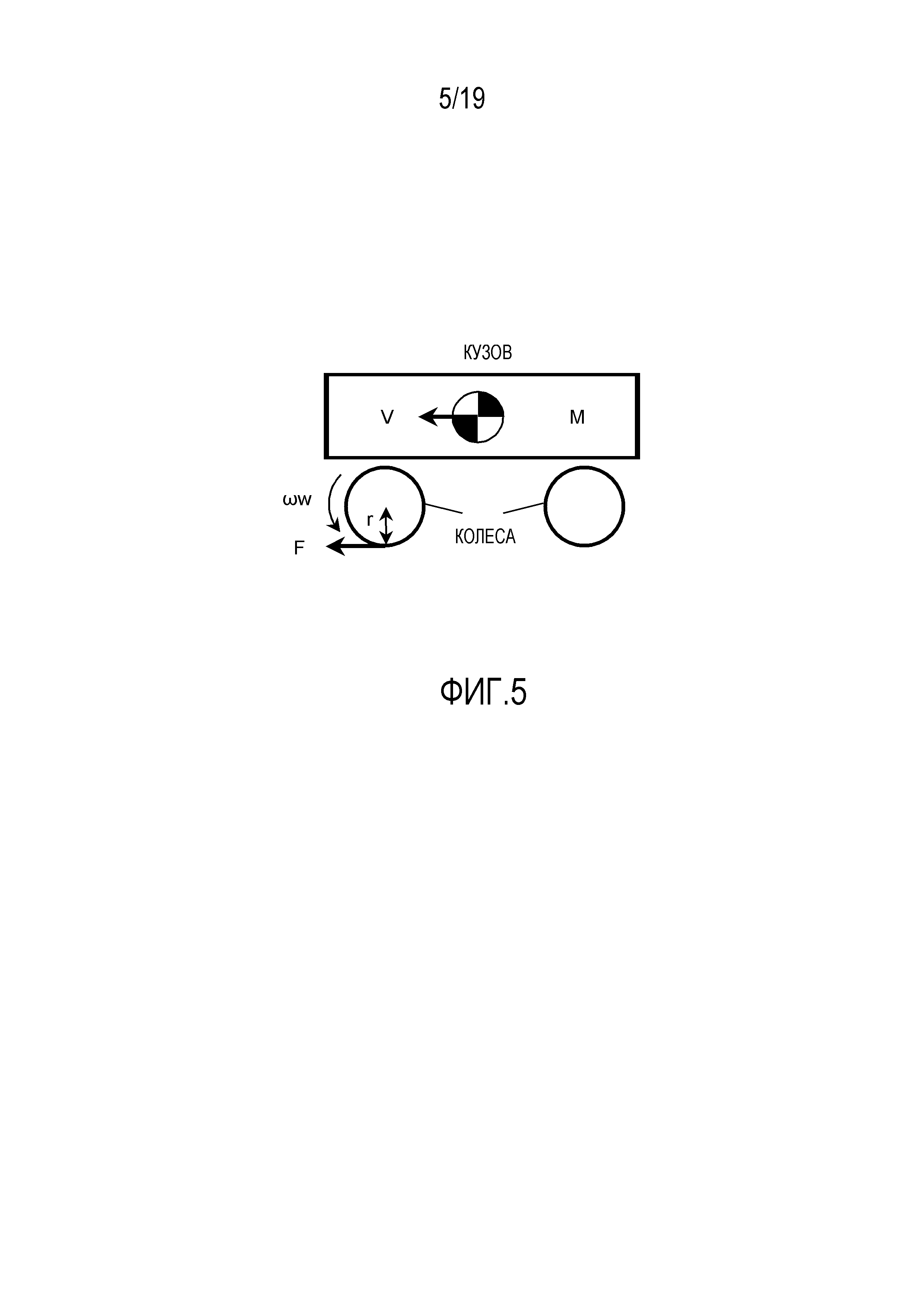
Фиг. 5 является схемой, моделирующей систему трансмиссии для передачи движущей силы транспортного средства.
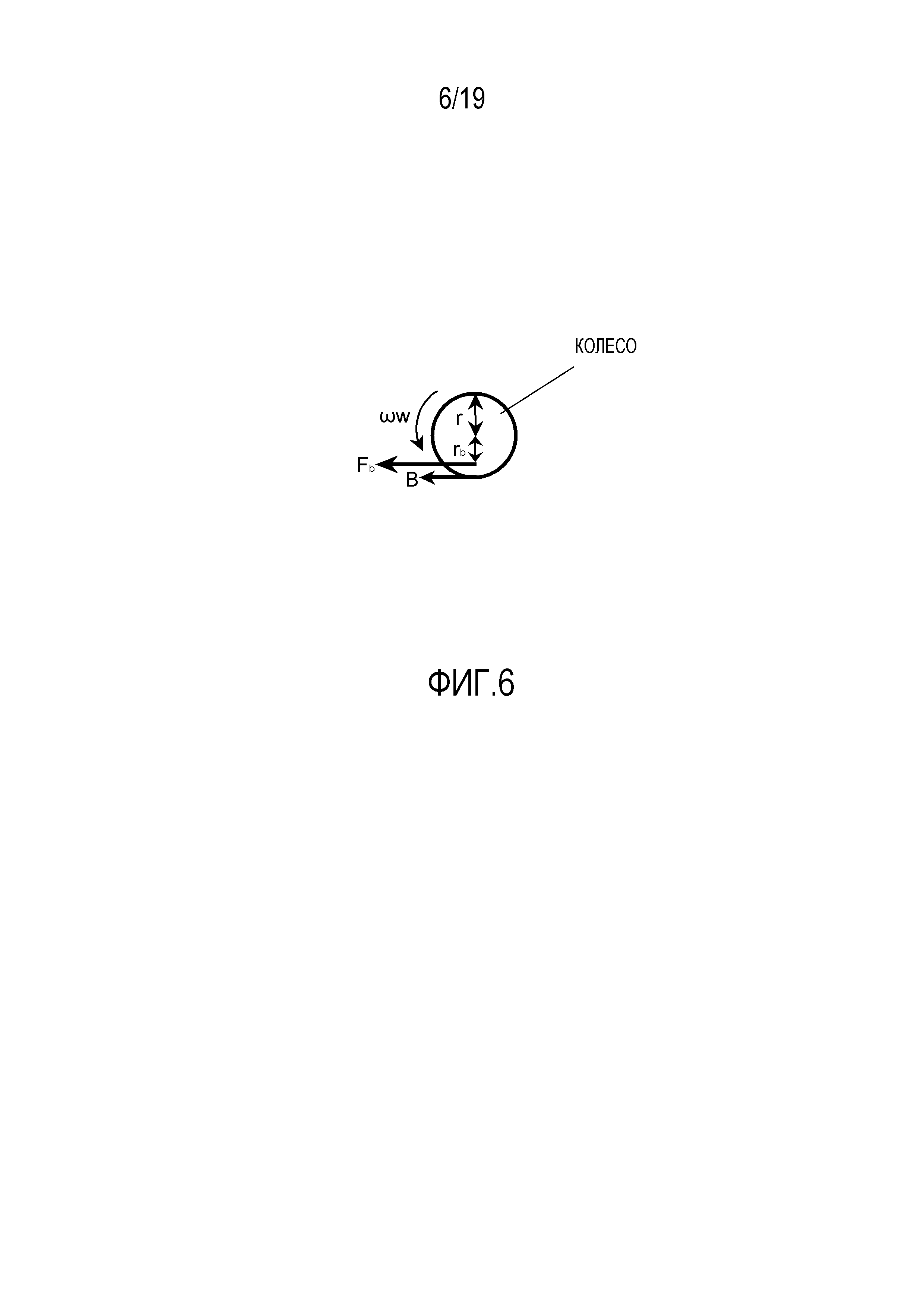
Фиг. 6 является схемой, моделирующей систему трансмиссии для передачи тормозной силы транспортного средства.
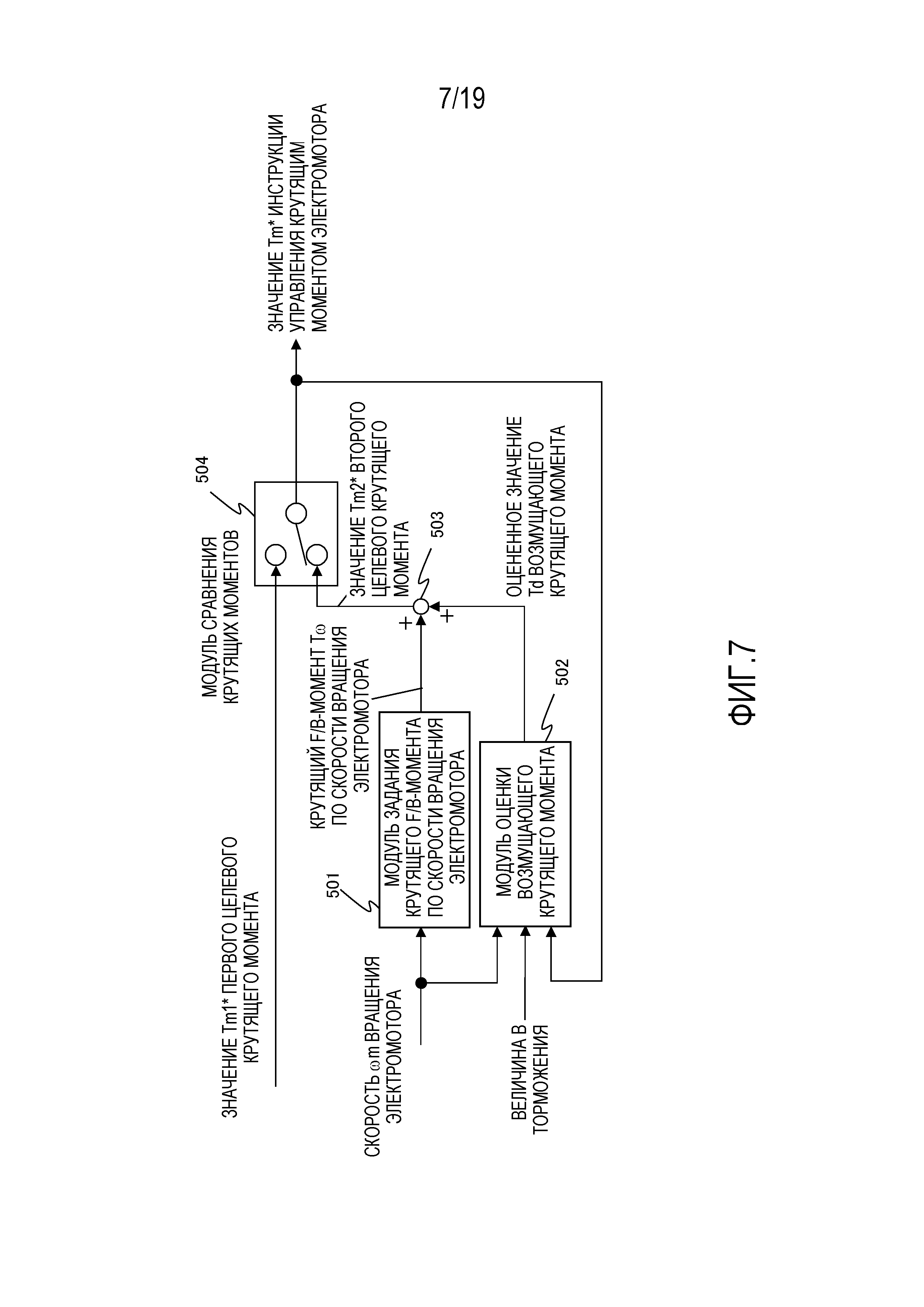
Фиг. 7 является блок-схемой для осуществления процесса управления остановкой.
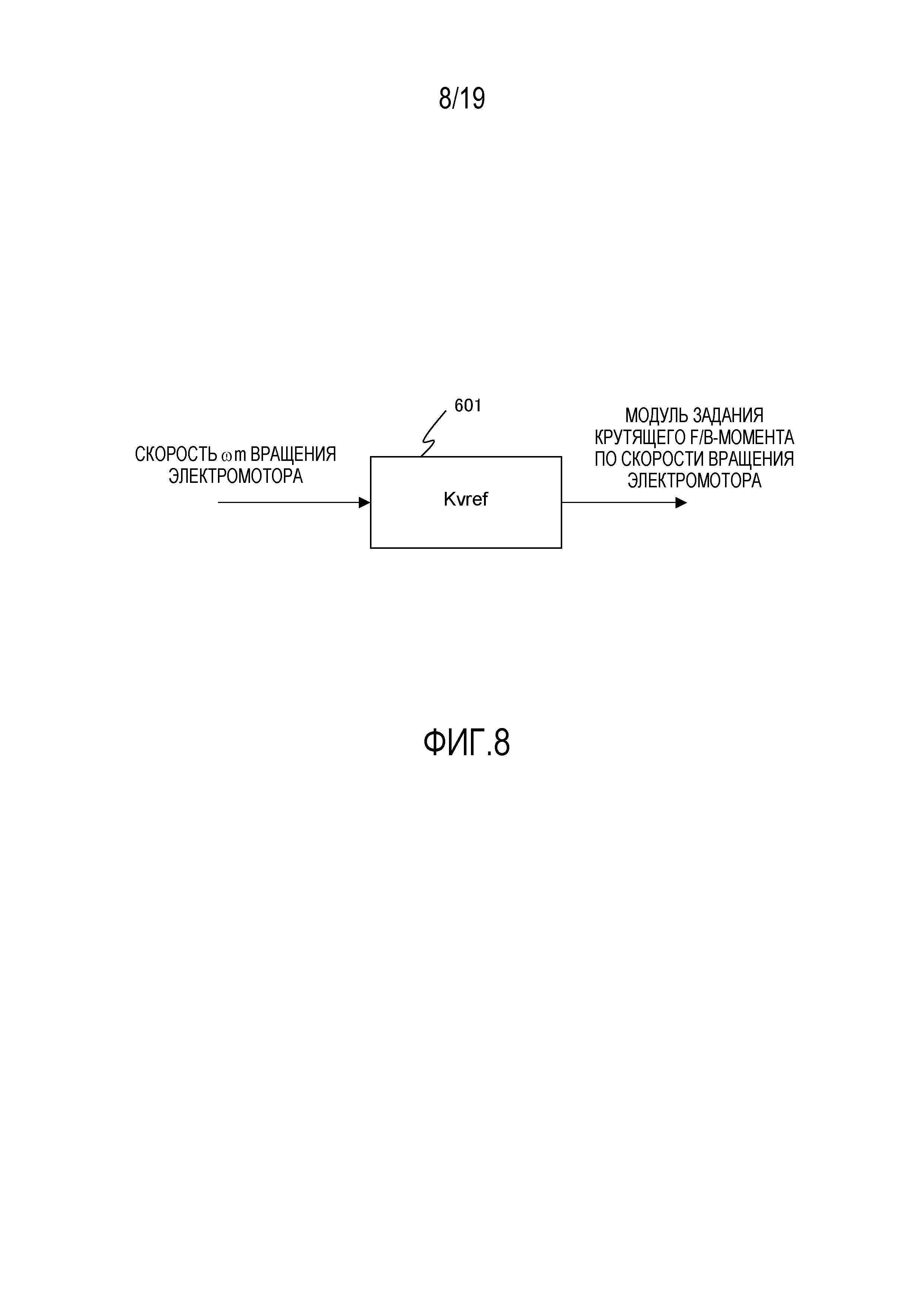
Фиг. 8 является схемой, описывающей способ для вычисления крутящего F/B-момента Tω по скорости вращения электромотора на основе скорости ωm вращения электромотора.
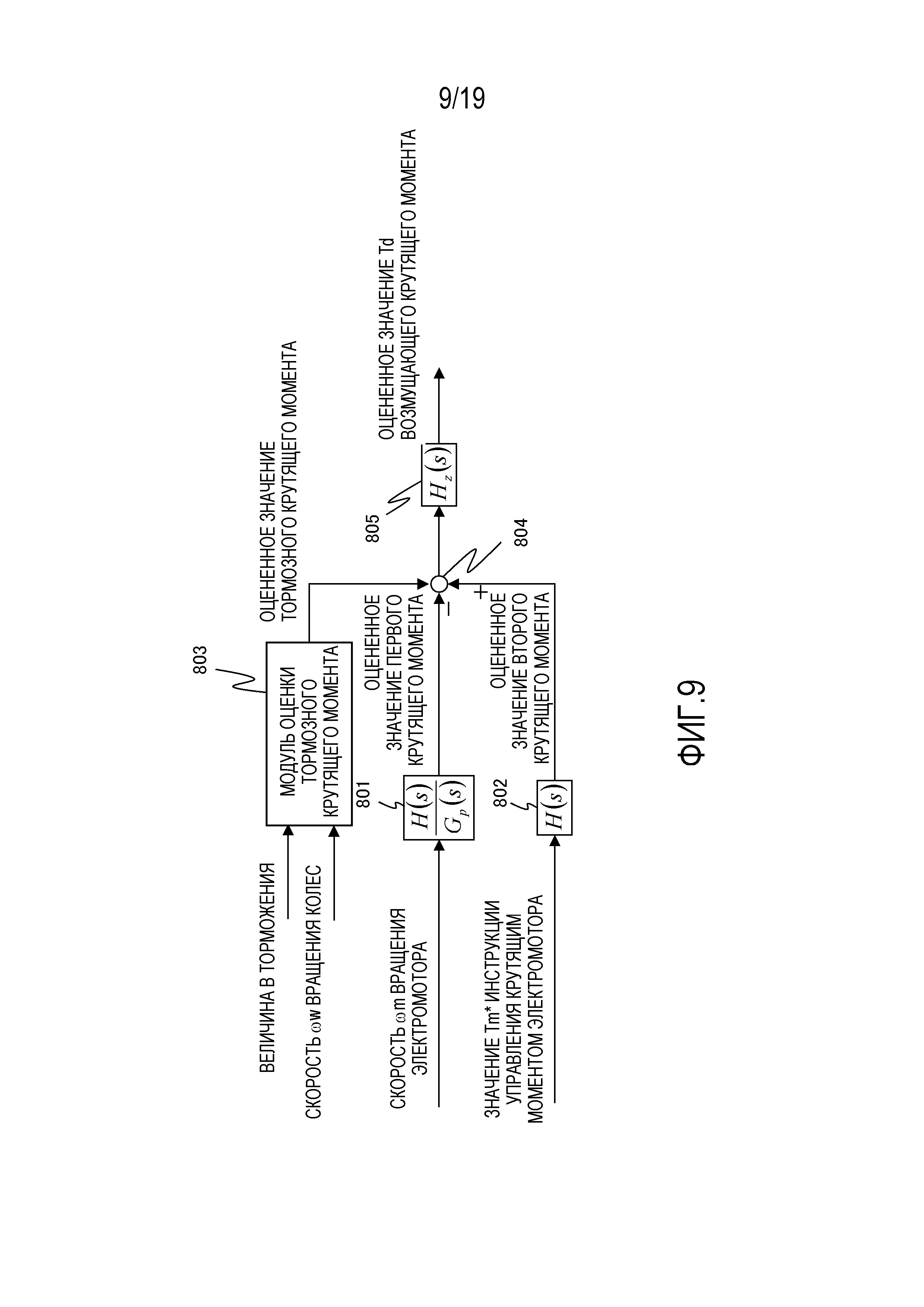
Фиг. 9 является схемой, описывающей способ для вычисления оцененного значения Td возмущающего крутящего момента.
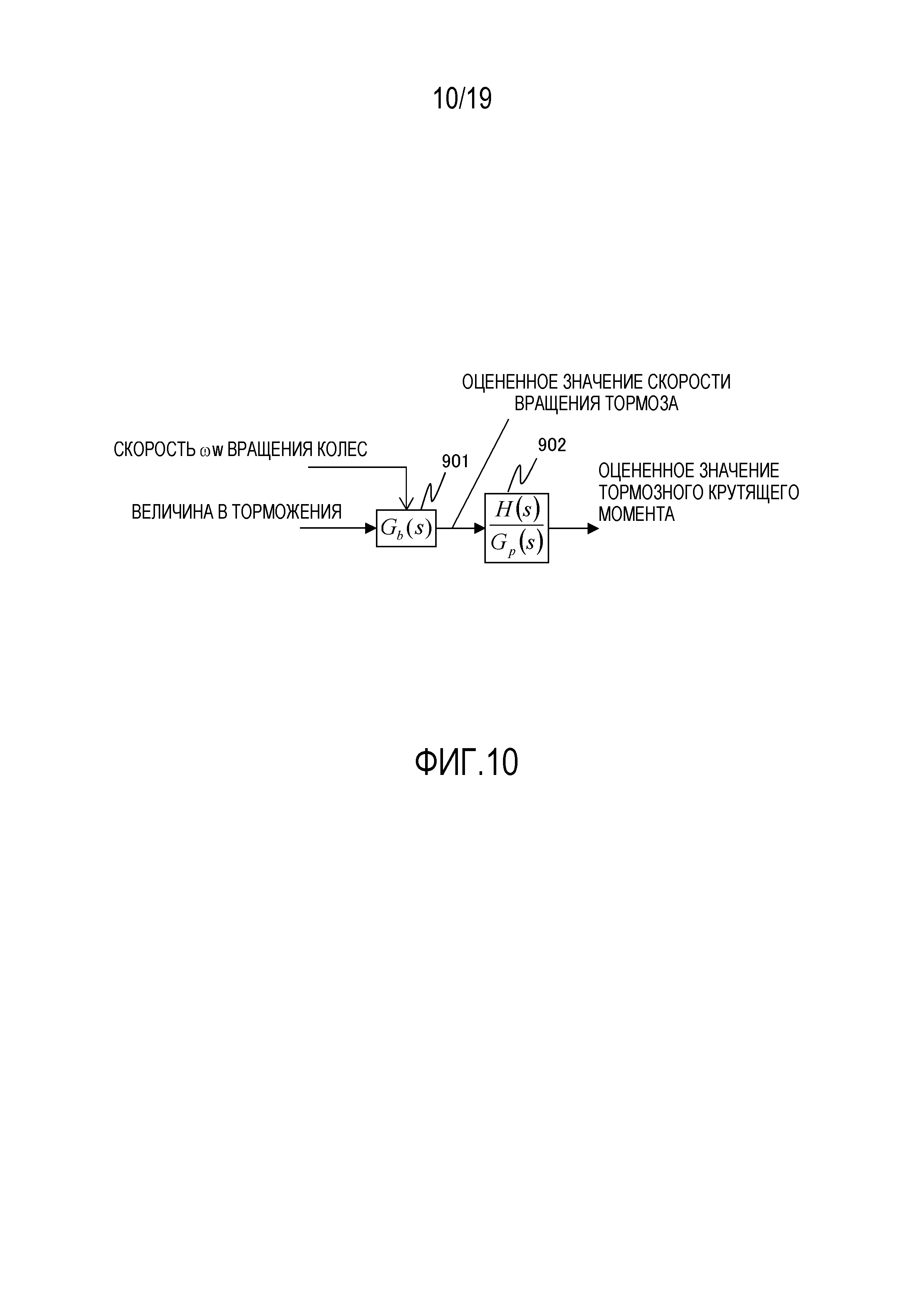
Фиг. 10 является схемой, описывающей способ для вычисления оцененного значения тормозного крутящего момента в устройстве управления для электромоторного транспортного средства по первому варианту осуществления.
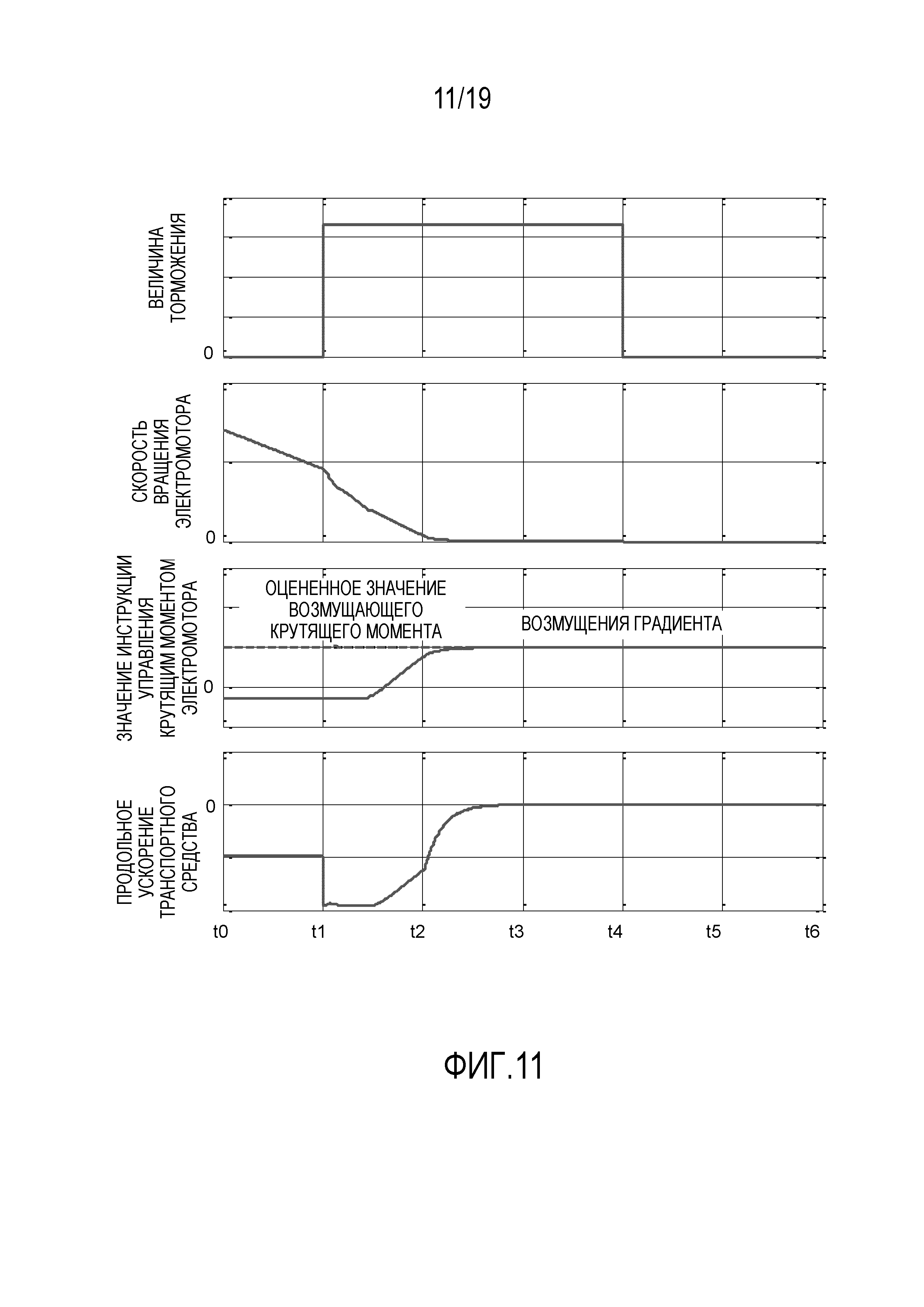
Фиг. 11 являются схемами, иллюстрирующими примеры результатов управления посредством устройства управления для электромоторного транспортного средства по первому варианту осуществления.
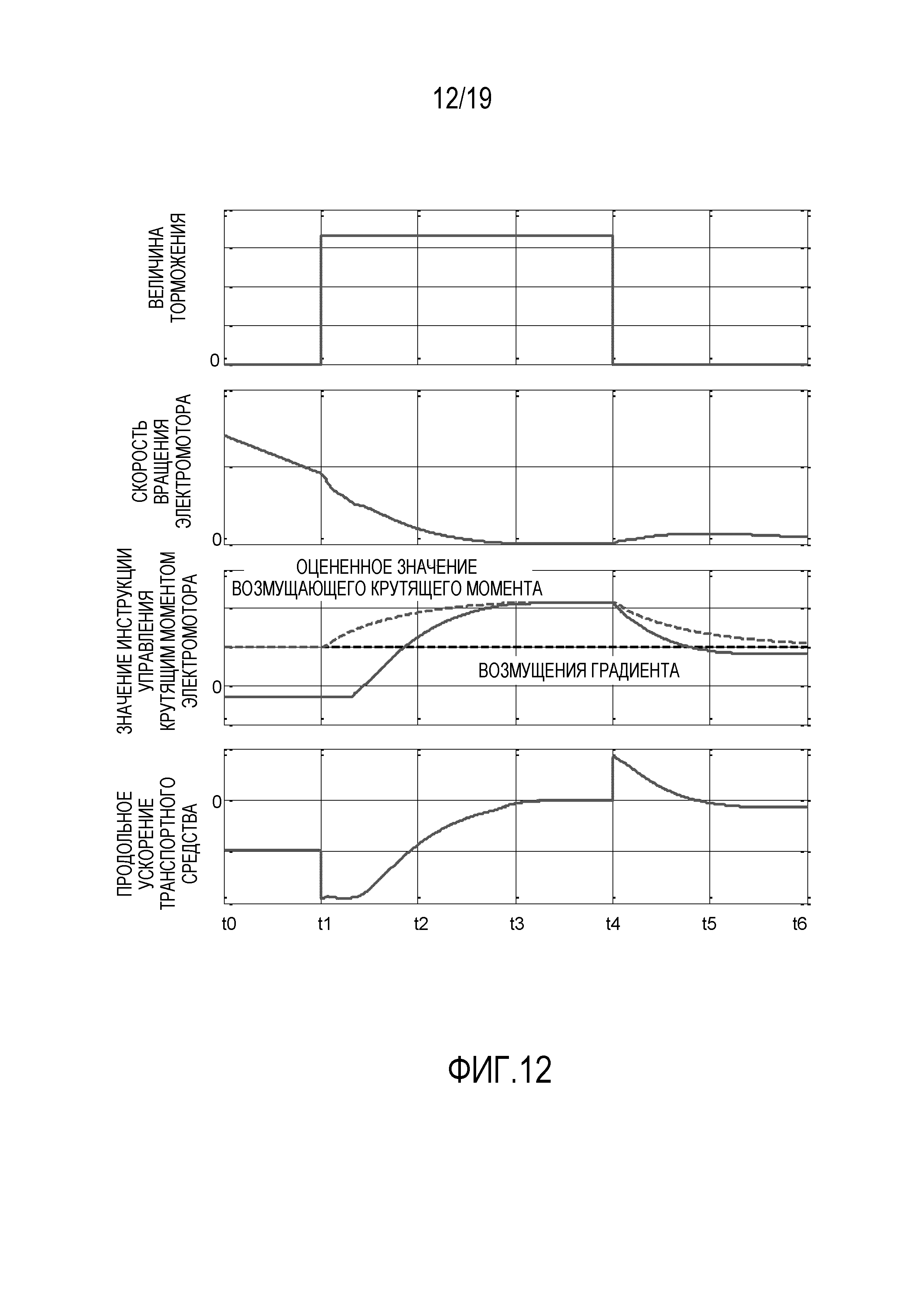
Фиг. 12 являются схемами, иллюстрирующими примеры результатов управления сравнительного примера.
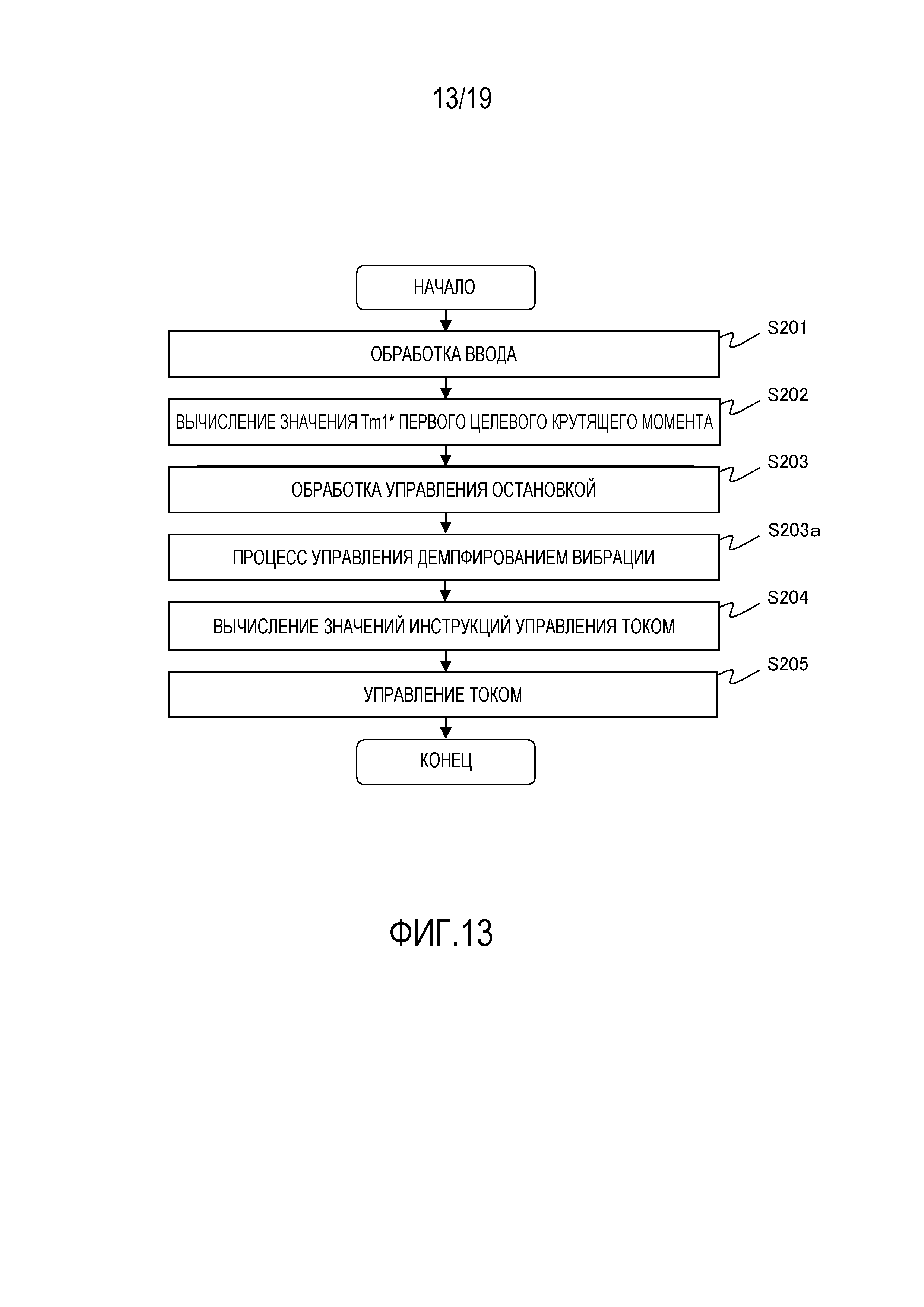
Фиг. 13 является последовательностью операций процессов для управления током электромотора, выполняемого посредством контроллера электромотора, содержащего устройство управления для электромоторного транспортного средства по второму варианту осуществления.
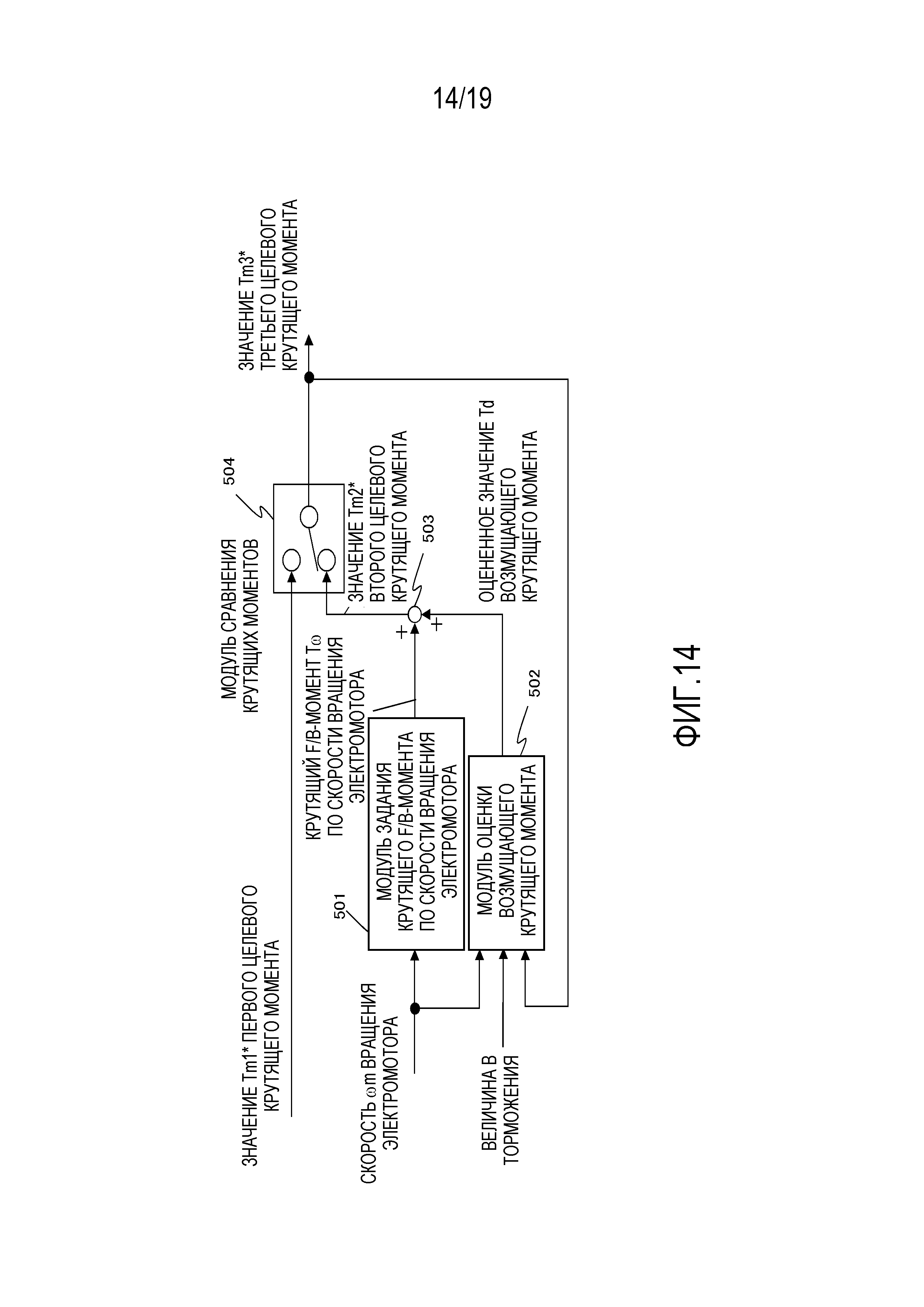
Фиг. 14 является блок-схемой процесса управления остановкой в устройстве управления для электромоторного транспортного средства по второму варианту осуществления.
Фиг. 15 является блок-схемой процесса управления демпфированием вибрации в устройстве управления для электромоторного транспортного средства по второму варианту осуществления.
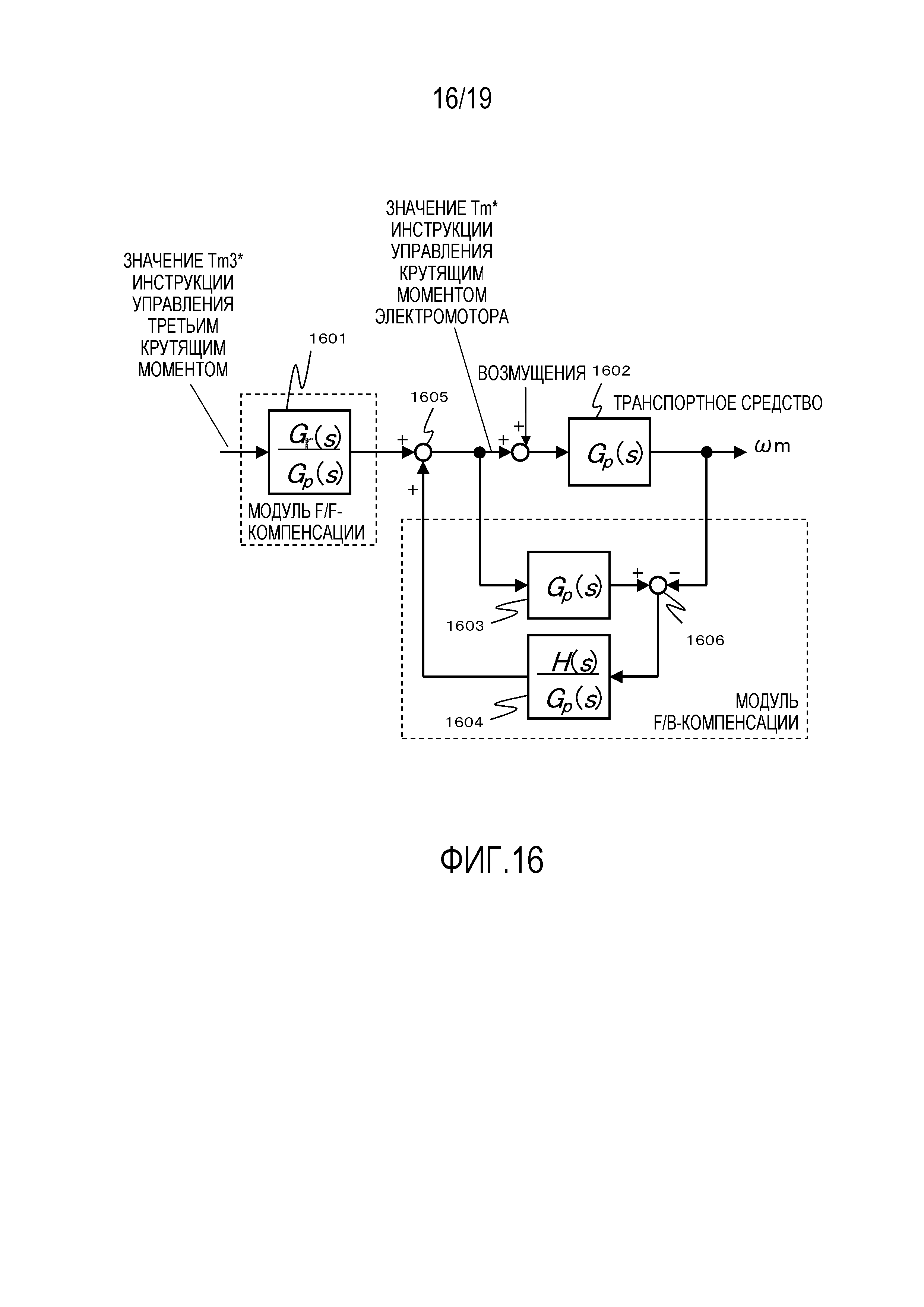
Фиг. 16 является блок-схемой, выражающей подробности процесса управления демпфированием вибрации в устройстве управления для электромоторного транспортного средства по второму варианту осуществления.
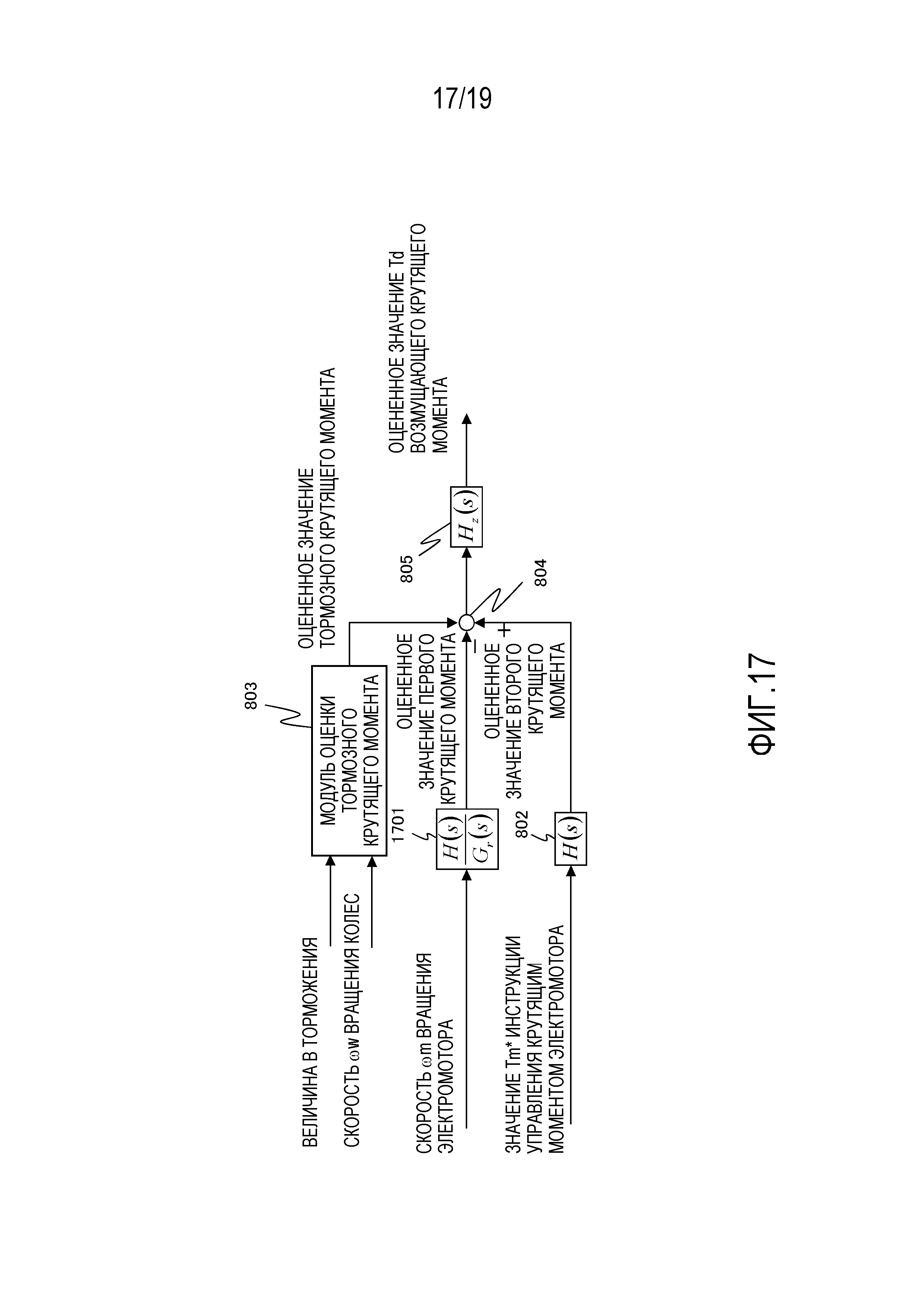
Фиг. 17 является схемой, описывающей способ для вычисления оцененного значения тормозного крутящего момента в устройстве управления для электромоторного транспортного средства по второму варианту осуществления.
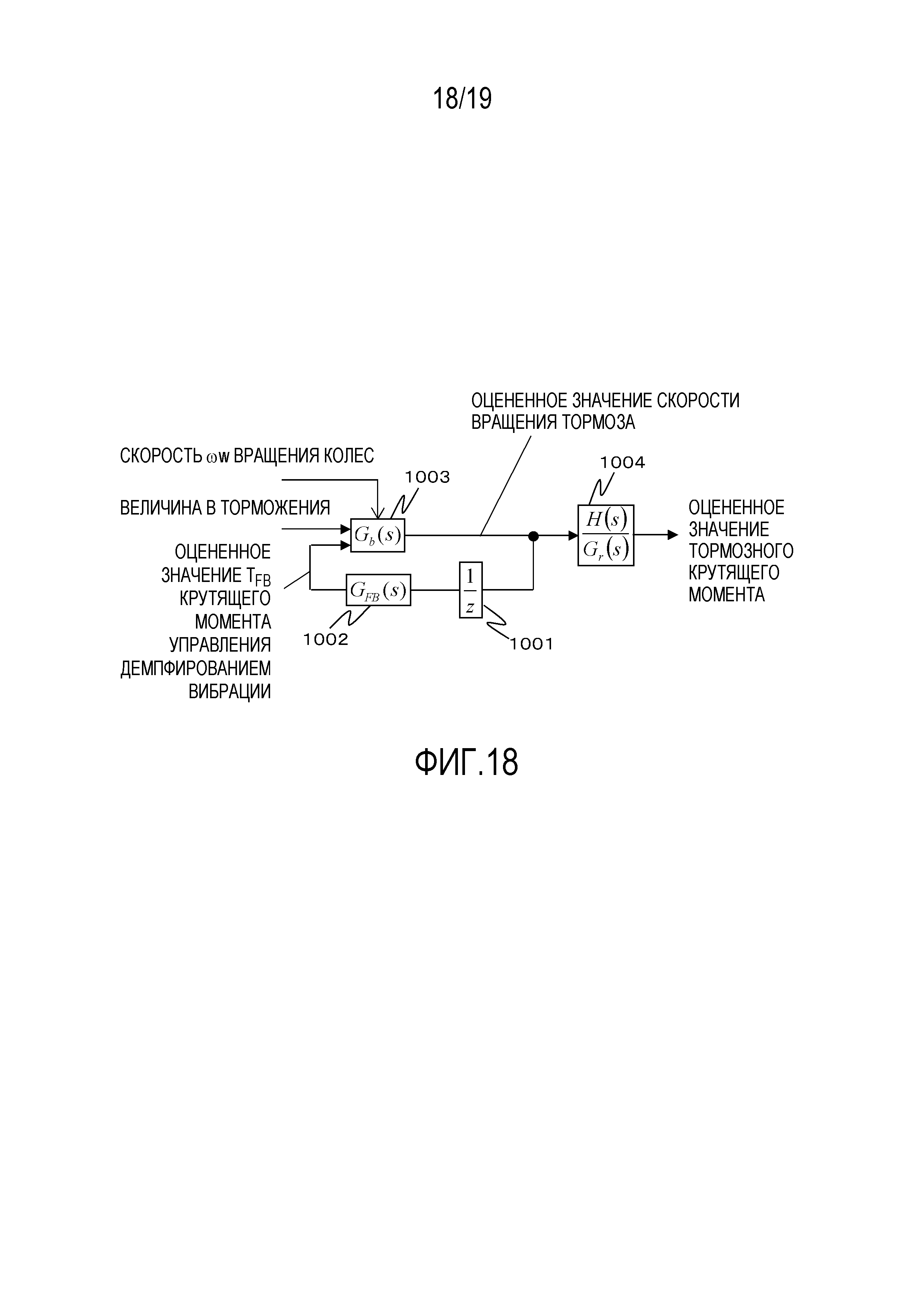
Фиг. 18 является схемой, описывающей способ для вычисления оцененного значения тормозного крутящего момента в устройстве управления для электромоторного транспортного средства по второму варианту осуществления.
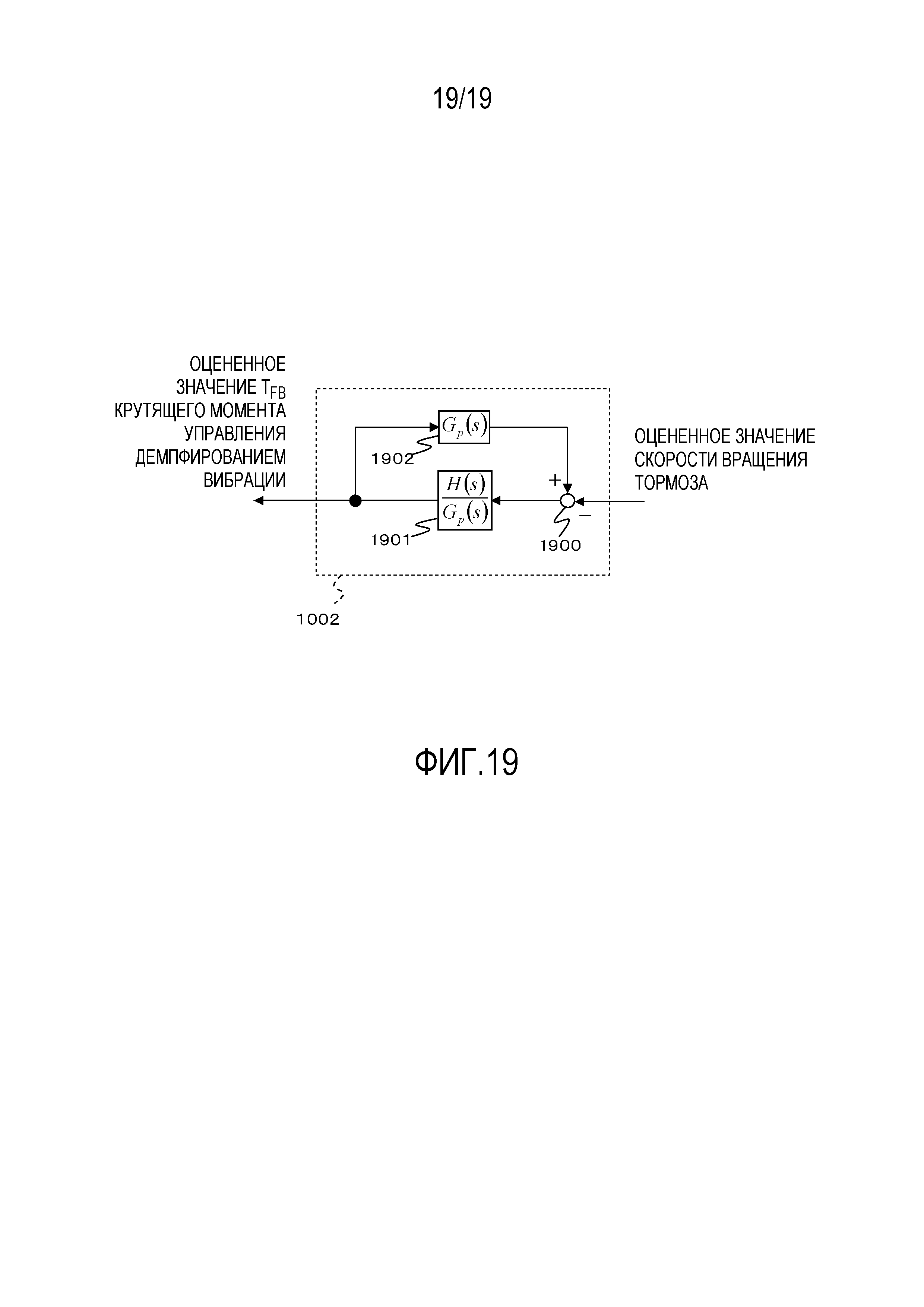
Фиг. 19 является схемой, описывающей способ для вычисления оцененного значения крутящего момента управления демпфированием вибрации в устройстве управления для электромоторного транспортного средства по второму варианту осуществления.
Подробное описание вариантов осуществления
[0008] Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей основную конфигурацию электротранспортного средства с устройством управления для электромоторного транспортного средства по первому варианту осуществления. Устройство управления для электромоторного транспортного средства настоящего изобретения включает в себя электромотор 4 в качестве части или всего источника приведения в движение транспортного средства и является применимым к электромоторному транспортному средству, допускающему движение посредством движущей силы электромотора. Электромоторные транспортные средства включают в себя не только электротранспортные средства, но также гибридные транспортные средства и транспортные средства на топливных элементах. В частности, устройство управления для электромоторного транспортного средства согласно настоящему варианту осуществления может применяться к транспортному средству, допускающему управление ускорением/замедлением и остановкой транспортного средства только посредством операции нажатия педали акселератора. В этом транспортном средстве, водитель нажимает педаль акселератора в ходе ускорения и уменьшает или обнуляет величину нажатия для нажатой педали акселератора в ходе замедления или в ходе остановки. Следует отметить, что транспортное средство стремится к остановленному состоянию в то время, когда водитель нажимает педаль акселератора, чтобы не допускать отката назад транспортного средства на дорогах, идущих в подъем, в некоторых случаях.
[0009] Контроллер 2 электромотора имеет сигналы, указывающие состояния транспортного средства, такие как скорость V транспортного средства, позиция AP акселератора, фаза α вращения электромотора 4 (электромотора трехфазного переменного тока), и токи iu, iv и iw электромотора 4, которые вводятся в контроллер 2 электромотора в форме цифровых сигналов, и формирует PWM-сигналы для управления электромотором 4 на основе входных сигналов. Контроллер 2 электромотора выполняет управление размыканием/замыканием переключающего элемента инвертора 3 посредством сформированного PWM-сигнала. Контроллер 2 электромотора имеет функции в качестве средства оценки возмущающего крутящего момента, средства вычисления значений команд управления крутящим моментом электромотора, средства управления электромотором и средства оценки тормозного крутящего момента. Средство оценки возмущающего крутящего момента оценивает возмущающий крутящий момент, что описывается ниже. Средство вычисления значений команд управления крутящим моментом электромотора вычисляет значение команды управления крутящим моментом электромотора, что описывается ниже. Средство управления электромотором управляет электромотором 4 на основе значения команды управления крутящим моментом электромотора. Средство оценки тормозного крутящего момента вычисляет оцененное значение тормозного крутящего момента, что описывается ниже.
[0010] Инвертор 3 включает/отключает, например, два переключающих элемента (например, силовые полупроводниковые элементы, такие как IGBT и MOSFET) для каждой фазы, чтобы преобразовывать постоянный ток, поданный из аккумулятора 1, в переменный ток, и заставляет требуемый ток протекать в электромотор 4.
[0011] Электромотор 4 формирует движущую силу посредством переменного тока, подаваемого из инвертора 3, и передает движущую силу на правое и левое ведущие колеса 9a, 9b через редуктор 5 и ведущий вал 8. Дополнительно, при вращении согласно ведущим колесам 9a, 9b во время движения транспортного средства, электромотор 4 формирует рекуперативную движущую силу, таким образом собирая кинетическую энергию транспортного средства в качестве электрической энергии. В этом случае, инвертор 3 преобразует переменный ток, сформированный во время работы в рекуперативном режиме электромотора 4, в постоянный ток и подает постоянный ток в аккумулятор 1.
[0012] Датчик 7 тока определяет трехфазные переменные токи iu, iv и iw, протекающие в электромоторе 4. Следует отметить, что поскольку сумма трехфазных переменных токов iu, iv и iw равна 0, токи двух произвольных фаз могут определяться, и ток оставшейся одной фазы может получаться посредством вычисления.
[0013] Датчик 6 вращения, например, представляет собой круговой датчик позиции или датчик позиции и определяет фазу α вращения электромотора 4.
[0014] Тормозной контроллер 11 задает величину B торможения согласно величине нажатия педали 10 тормоза с тем, чтобы управлять давлением тормозной жидкости согласно величине B торможения.
[0015] Датчик 12 давления жидкости выступает в качестве средства определения рабочей величины нажатия педали тормоза и определяет давление тормозной жидкости, чтобы получать величину B торможения, и выводит полученную величину B торможения в контроллер 2 электромотора.
[0016] Фрикционный тормоз 13 прижимает тормозную колодку к ротору согласно давлению тормозной жидкости, за счет этого формируя тормозную силу в транспортном средстве.
[0017] Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций процессов для управления током электромотора, выполняемого посредством контроллера 2 электромотора.
[0018] На этапе S201, вводятся сигналы, указывающие состояния транспортного средства. Здесь, вводятся скорость V транспортного средства (км/ч), позиция AP педали акселератора (%), фаза α вращения (рад) электромотора 4, скорость Nm вращения (об/мин) электромотора 4, трехфазные переменные токи iu, iv и iw, протекающие в электромоторе 4, значение Vdc постоянного напряжения (В) между аккумулятором 1 и инвертором 3, и величина B торможения.
[0019] Скорость V транспортного средства (км/ч) получается посредством датчика скорости транспортного средства или через связь из другого контроллера (не проиллюстрирован). Альтернативно, скорость v транспортного средства (м/с) получается посредством умножения механической угловой скорости ωm вращения на динамический радиус R шины и деления произведения на передаточное отношение главной шестерни, и после этого полученное значение умножается на 3600/1000 для преобразования единиц измерения, за счет этого получая скорость V транспортного средства (км/ч).
[0020] Позиция AP акселератора (%) получается из позиции акселератора (не проиллюстрирована) или через связь из другого контроллера, такого как контроллер транспортного средства (не проиллюстрирован).
[0021] Фаза α вращения (рад) электромотора 4 получается из датчика 6 вращения. Скорость Nm вращения (об/мин) электромотора 4 получается посредством деления угловой скорости ω вращения (электрического угла) на номер p полюсной пары электромотора 4, чтобы получать скорость ωm вращения электромотора (рад/с), которая представляет собой механическую угловую скорость электромотора 4, и умножения полученной скорости ωm вращения электромотора на 60/(2π). Угловая скорость ωm вращения получается посредством дифференцирования фазы α вращения.
[0022] Токи iu, iv и iw(а), протекающие в электромоторе 4, получаются из датчика 7 тока.
[0023] Значение Vdc постоянного напряжения (В) получается из датчика напряжения (не проиллюстрирован), предоставленного в линии электропитания постоянного тока между аккумулятором 1 и инвертором 3, или значения напряжения питания, передаваемого из контроллера аккумулятора (не проиллюстрирован).
[0024] Величина B торможения получается из датчика 12 давления жидкости, который определяет давление тормозной жидкости. Может использоваться, например, значение датчика хода (не проиллюстрирован), который определяет рабочую величину нажатия педали тормоза водителем. Альтернативно, значение команды торможения может получаться из контроллера транспортного средства и другого контроллера (не проиллюстрирован) через связь, чтобы задавать значение команды торможения в качестве величины B торможения. Когда величина B торможения задается из значения датчика или значения команды управления, учитывается скорость отклика от момента, когда величина B торможения вводится в транспортное средство, до момента, когда тормозная сила фактически действует на транспортное средство.
[0025] На этапе S202, задается значение Tm1* первого целевого крутящего момента. В частности, значение Tm1* первого целевого крутящего момента задается на основе позиции AP акселератора, вводимой на этапе S201, и скорости ωm вращения электромотора посредством обращения к таблице позиций акселератора и крутящих моментов, проиллюстрированной на фиг. 3. Как описано выше, устройство управления для электромоторного транспортного средства согласно варианту осуществления может применяться к транспортному средству, допускающему управление ускорением/замедлением и остановкой транспортного средства только посредством операции нажатия педали акселератора. Чтобы обеспечивать, по меньшей мере, остановку транспортного средства посредством полного закрытия педали акселератора, в таблице позиций акселератора и крутящих моментов, проиллюстрированной на фиг. 3, крутящий момент электромотора задается таким образом, что величина рекуперации электромотора с позицией акселератора 0 (полностью закрытой) увеличивается. Таким образом, когда скорость вращения электромотора является положительной, и, по меньшей мере, позиция акселератора равна 0 (полностью закрытая), отрицательный крутящий момент электромотора задается таким образом, чтобы осуществлять работу посредством рекуперативной тормозной силы. Следует отметить, что таблица позиций акселератора и крутящих моментов не ограничена таблицей, проиллюстрированной на фиг. 3.
[0026] На этапе S203, выполняется процесс управления остановкой. В частности, определяется то, находится или нет электромоторное транспортное средство в момент времени непосредственно перед остановкой транспортного средства. Значение Tm1* первого целевого крутящего момента, вычисленное на этапе S202, задается в качестве значения Tm* команды управления крутящим моментом электромотора до того, как электромоторное транспортное средство находится в момент времени непосредственно перед остановкой транспортного средства, и значение Tm2* второго целевого крутящего момента, которое сходится к значению Td команды управления возмущающим крутящим моментом с уменьшением скорости вращения электромотора, задается в качестве значения Tm* команды управления крутящим моментом электромотора после того, как электромоторное транспортное средство находится в момент времени непосредственно перед остановкой транспортного средства. Это значение Tm2* второго целевого крутящего момента представляет собой положительный крутящий момент на дороге, идущей в подъем, отрицательным крутящим моментом на дороге, идущей под спуск, и почти нулевым на ровной дороге. Таким образом, состояние остановки транспортного средства может поддерживаться независимо от градиента поверхности дороги, как описано ниже. Ниже описываются подробности процесса управления остановкой.
[0027] На этапе S204, целевое значение id* тока d-оси и целевое значение iq* тока q-оси получаются на основе значения Tm* целевого крутящего момента электромотора, вычисленного на этапе S203, скорости ωm вращения электромотора и значения Vdc постоянного напряжения. Например, таблица, получающая взаимосвязь целевого значения тока d-оси и целевого значения тока q-оси со значением команды управления крутящим моментом, скоростью вращения электромотора и значением постоянного напряжения, подготавливается заранее, и целевое значение id* тока d-оси и целевое значение iq* тока q-оси получаются посредством обращения к этой таблице.
[0028] На этапе S205, управление по току выполняется таким образом, чтобы сопоставлять ток id d-оси и ток iq d-оси с целевым значением id* тока d-оси и целевым значением iq* тока q-оси, полученными на этапе S204, соответственно. С этой целью, ток id d-оси и ток iq d-оси сначала получаются на основе значений iu, iv и iw трехфазного переменного тока и фазы α вращения электромотора 4, вводимых на этапе S201. Затем, значения vd и vq команд управления напряжением d-оси и q-оси вычисляются из отклонений между значениями id* и iq* команд управления током d-оси и q-оси и токами id и iq d-оси и q-оси. Следует отметить, что напряжение помехозащищенности, необходимое для того, чтобы уравновешивать напряжение помех между ортогональными осями координат d-q, может суммироваться с вычисленными значениями vd и vq команд управления напряжением d-оси и q-оси.
[0029] Затем, из значений vd и vq команд управления напряжением d-оси и q-оси и фазы α вращения электромотора 4 и из значений vu, vv и vw команд управления трехфазным переменным напряжением и значения Vdc напряжения по току, получаются PWM-сигналы tu (%), tv (%) и tw (%). Посредством размыкания и замыкания переключающих элементов инвертора 3 посредством PWM-сигналов tu, tv и tw, полученных таким способом, электромотор 4 может приводиться в действие с требуемым крутящим моментом, инструктированным посредством значения Tm* команды управления крутящим моментом.
[0030] Здесь, до того, как описывается процесс управления остановкой, выполняемый на этапе S203, передаточная характеристика Gp(s) из крутящего момента Tm электромотора в скорость ωm вращения электромотора описывается в устройстве управления для электромоторного транспортного средства согласно настоящему варианту осуществления.
[0031] Фиг. 4 и фиг. 5 являются схемами, моделирующими систему трансмиссии для передачи движущей силы транспортного средства, и соответствующие параметры на схемах являются такими, как описано ниже.
Jm – момент инерции электромотора
Jw – момент инерции ведущих колес
M - масса транспортного средства
KD - крутильная жесткость приводной системы
Kt - коэффициент, связывающий трение между шинами и поверхностью дороги
N - полное передаточное отношение
r - чрезмерный радиус шин
ωm - угловая скорость электромотора
Tm - значение Tm* целевого крутящего момента
TD - крутящий момент ведущих колес
F - сила, прикладываемая к транспортному средству
V - скорость транспортного средства
ωw - угловая скорость ведущих колес
Следующие уравнения движения могут извлекаться из фиг. 4 и фиг. 5. Следует отметить, что звездочка (*), присоединяемая в правом верхнем углу ссылочного обозначения в следующих уравнениях (1)-(3), указывает производную по времени.
[0032] уравнение 1

[0033] уравнение 2

[0034] уравнение 3

[0035] уравнение 4

[0036] уравнение 5

[0037] Передаточная характеристика Gp(s) из значения Tm целевого крутящего момента электромотора 4 в скорость ωm вращения электромотора, полученная на основе уравнений движения (1)-(5), выражается посредством следующего уравнения (6).
[0038] уравнение 6

[0039] Здесь, каждый параметр в уравнении (6) выражается посредством следующих уравнений (7).
[0040] уравнение 7
[0041] Посредством исследований, полюса и нулевые точки передаточной функции, показанной в уравнении (6), могут быть аппроксимированы в передаточную функцию следующего уравнения (8), и один полюс и одна нулевая точка указывают значения, чрезвычайно близкие друг к другу. Это является эквивалентным тому, что α и β следующего уравнения (8) указывают значения, чрезвычайно близкие друг к другу.
[0042] уравнение 8

[0043] Соответственно, посредством выполнения отмены нулей и полюсов (аппроксимации для α=β) в уравнении (8), Gp(s) составляет передаточную характеристику (второй порядок)/(третий порядок), как показано в следующем уравнении (9).
[0044] уравнение 9

[0045] Далее описывается передаточная характеристика GP(s) из величины B торможения в скорость ωm вращения электромотора.
[0046] Фиг. 6 является схемой, моделирующей систему трансмиссии для передачи тормозной силы транспортного средства, и соответствующие параметры на схеме являются такими, как описано ниже.
rb - радиус до точки действия, в которой действует фрикционная тормозная сила
F/B - величина торможения посредством фрикционного тормоза в точке действия
B -
величина торможения
Следующие уравнения движения могут извлекаться из фиг. 6.
[0047] уравнение 10

[0048] Следует отметить, что F/B в уравнении (10) заключается в следующем.
ωw>0: F/B>0
ωw=0: F/B=0
ωw<0: F/B<0
Следующие уравнения движения могут извлекаться из фиг. 4, фиг. 5 и фиг. 6.
[0049] уравнение 11

[0050] Чтобы получать передаточную характеристику Gb(s) из величины B торможения тормоза в скорость ωm вращения электромотора на основе уравнений движения, указываемых посредством уравнений (1), (3), (4), (5) и (11), передаточная характеристика Gb(s) выражается посредством следующего уравнения (12).
[0051] уравнение 12

[0052] Следует отметить, что соответствующие параметры в уравнении (12) выражаются посредством следующего уравнения (13).
[0053] уравнение 13
[0054] После этого описываются подробности процесса управления остановкой, выполняемого на этапе S203 по фиг. 2. Фиг. 7 является блок-схемой для осуществления процесса управления остановкой.
[0055] Устройство 501 задания крутящего F/B-момента по скорости вращения электромотора вычисляет крутящий момент обратной связи по скорости вращения электромотора Tω (в дальнейшем называемый "крутящим F/B-моментом Tω по скорости вращения электромотора"), чтобы останавливать электромоторное транспортное средство посредством рекуперативной тормозной силы из электромотора 4 на основе определенной скорости ωm вращения электромотора.
[0056] Фиг. 8 является схемой, описывающей способ для вычисления крутящего F/B-момента ωm по скорости вращения электромотора на основе скорости ωm вращения электромотора. Устройство 501 задания крутящих F/B-моментов по скорости вращения электромотора включает в себя умножитель 601 и вычисляет крутящий F/B-момент Tω по скорости вращения электромотора посредством умножения скорости ωm вращения электромотора на усиление Kvref. Тем не менее, Kvref является отрицательным значением (со знаком "минус"), необходимым для того, чтобы останавливать электромоторное транспортное средство непосредственно перед тем, как электромоторное транспортное средство останавливается, и надлежащим образом задается, например, из экспериментальных данных или аналогичных данных. Таким образом, крутящий F/B-момент Tω по скорости вращения электромотора задается в качестве крутящего момента, допускающего получение большей рекуперативной тормозной силы по мере того, как увеличивается скорость ωm вращения электромотора.
[0057] Следует отметить, что хотя устройство 501 задания крутящего F/B-момента по скорости вращения электромотора описывается таким образом, что оно вычисляет крутящий F/B-момент Tω по скорости вращения электромотора посредством умножения скорости ωm вращения электромотора на усиление Kvref, крутящий F/B-момент Tω по скорости вращения электромотора может вычисляться с использованием таблицы рекуперативных крутящих моментов, задающей рекуперативный крутящий момент относительно скорости ωm вращения электромотора, и таблицы темпов спада, сохраняющей темп спада скорости ωm вращения электромотора заранее.
[0058] Модуль 502 оценки возмущающего крутящего момента вычисляет оцененное значение Td возмущающего крутящего момента на основе определенной скорости ωm вращения электромотора, величины B торможения и значения Tm* команды управления крутящим моментом электромотора.
[0059] Фиг. 9 является схемой, описывающей способ для вычисления оцененного значения Td возмущающего крутящего момента на основе скорости ωm вращения электромотора, величины B торможения и значения Tm* команды управления крутящим моментом электромотора.
[0060] Блок 801 управления выступает в качестве фильтра, имеющего передаточную характеристику H(s)/Gp(s), и вводит скорость ωm вращения электромотора и выполняет процесс фильтрации, за счет этого вычисляя первое оцененное значение крутящего момента электромотора. Gp(s) представляет собой модель для передаточной характеристики от момента ввода крутящего момента в транспортное средство до момента скорости вращения электромотора и выражается посредством уравнения (9). H(s) представляет собой фильтр нижних частот, имеющий такую передаточную характеристику, что разность между его степенью знаменателя и степенью числителя не меньше разности между степенью знаменателя и степенью числителя модели Gp(s).
[0061] Блок 802 управления выступает в качестве фильтра нижних частот, имеющего передаточную характеристику H(s), и вводит значение Tm* команды управления крутящим моментом электромотора и выполняет процесс фильтрации, за счет этого вычисляя второе оцененное значение крутящего момента электромотора.
[0062] Модуль 803 оценки тормозного крутящего момента вводит величину B торможения и скорость ωw вращения колес, чтобы вычислять оцененное значение тормозного крутящего момента посредством способа оценки тормозного крутящего момента, который описывается ниже. Здесь, поскольку тормозная сила посредством тормоза действует в направлении замедления как при движении вперед, так и при откате назад транспортного средства, знак оцененного значения тормозного крутящего момента должен инвертироваться согласно знаку продольной скорости транспортного средства (к примеру, скорости кузова транспортного средства, скорости вращения колес, скорости вращения электромотора и скорости вращения ведущего вала). Следовательно, оцененное значение тормозного крутящего момента задается отрицательным для движения вперед транспортного средства и задается положительным для отката назад транспортного средства согласно скорости ωw вращения колес.
[0063] Далее описываются подробности модуля 803 оценки тормозного крутящего момента со ссылкой на фиг. 10. Фиг. 10 является блок-схемой, описывающей способ для вычисления оцененного значения тормозного крутящего момента на основе величины B торможения и скорости ωw вращения колес.
[0064] Блок 901 управления выполняет процесс фильтрации для величины B торможения с вышеописанной передаточной характеристикой Gb(s), чтобы вычислять оцененное значение скорости вращения тормоза.
[0065] Блок 902 управления выступает в качестве фильтра, имеющего передаточную характеристику H(s)/Gp(s) с использованием фильтра H(s) нижних частот. Блок 902 управления вводит оцененное значение скорости вращения тормоза и выполняет процесс фильтрации, чтобы вычислять оцененное значение тормозного крутящего момента. Вычисленное оцененное значение тормозного крутящего момента выводится в сумматор/вычитатель 804.
[0066] Снова ссылаясь на фиг. 9, пояснение продолжается. Сумматор/вычитатель 804 вычитает первое оцененное значение крутящего момента электромотора из второго оцененного значения крутящего момента электромотора и суммирует оцененное значение тормозного крутящего момента с полученным значением. Суммирование оцененного значения тормозного крутящего момента обеспечивает вычисление оцененного значения Td возмущающего крутящего момента, при котором тормозной крутящий момент, вызываемый посредством величины B торможения, компенсируется на последующей стадии. Вычисленное значение выводится в блок 805 управления.
[0067] Блок 805 управления представляет собой фильтр, имеющий передаточную характеристику Hz(s), которая описывается ниже, и вводит вывод из Сумматора/вычитателя 804 и выполняет процесс фильтрации, за счет этого вычисляя оцененное значение Td возмущающего крутящего момента.
[0068] Здесь, далее описывается передаточная характеристика Hz(s). Следующее уравнение (14) получается посредством перезаписи уравнения (9): ξz, ωz, ξp и ωp в уравнении (14) выражаются посредством уравнения (15).
[0069] уравнение 14

[0070] уравнение 15
[0071] Как описано выше, Hz(s) выражается посредством следующего уравнения (16).
[0072] уравнение 16

[0073] Следует отметить, что в этом варианте осуществления, модуль наблюдения возмущений оценивает возмущающий крутящий момент, как проиллюстрировано на фиг. 9.
[0074] Здесь, хотя сопротивление воздуха, погрешность моделирования, вызываемая посредством варьирования массы транспортного средства вследствие числа пассажиров и допустимой нагрузки, сопротивление качения шин, сопротивление вследствие градиента поверхности дороги и аналогичное сопротивление считаются возмущениями, фактор возмущений, доминирующий непосредственно перед остановкой транспортного средства, представляет собой сопротивление вследствие градиента. Хотя факторы возмущений отличаются в зависимости от условий вождения, факторы возмущений, описанные выше, могут совместно оцениваться независимо от рабочей величины нажатия педали тормоза водителем, поскольку модуль 502 оценки возмущающего крутящего момента вычисляет оцененное значение Td возмущающего крутящего момента на основе значения Tm* команды управления крутящим моментом электромотора, скорости ωm вращения электромотора, величины B торможения, которая представляет собой компонент сопротивления, не связанный с градиентом, и модель Gp(s) транспортного средства. Это позволяет добиваться плавной остановки транспортного средства из замедления при любом состоянии движения.
[0075] Снова ссылаясь на фиг. 7, пояснение продолжается. Сумматор 503 вычисляет значение Tm2* второго целевого крутящего момента посредством суммирования крутящего F/B-момента Tω по скорости вращения электромотора, вычисленного посредством устройства 501 задания крутящих F/B-моментов по скорости вращения электромотора, и оцененного значения Td возмущающего крутящего момента, вычисленного посредством модуля 502 оценки возмущающих крутящих моментов.
[0076] Модуль 504 сравнения крутящих моментов сравнивает абсолютные величины значения Tm1* первого целевого крутящего момента со значением Tm2* второго целевого крутящего момента и задает большее значение целевого крутящего момента в качестве значения Tm* команды управления крутящим моментом электромотора. Значение Tm2* второго целевого крутящего момента меньше значения Tm1* первого целевого крутящего момента во время движения транспортного средства. Когда транспортное средство замедляется и достигает момента времени непосредственно перед остановкой транспортного средства (скорость транспортного средства равна или меньше предварительно определенной скорости транспортного средства), значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента. Таким образом, когда значение Tm1* первого целевого крутящего момента превышает значение Tm2* второго целевого крутящего момента, модуль 504 сравнения крутящих моментов определяет то, что транспортное средство находится в момент времени до момента времени непосредственно перед остановкой транспортного средства и задает значение Tm* команды управления крутящим моментом электромотора равным значению Tm1* первого целевого крутящего момента. Дополнительно, когда значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента, модуль 504 сравнения крутящих моментов определяет то, что транспортное средство находится в момент времени непосредственно перед остановкой транспортного средства, и переключает значение Tm* команды управления крутящим моментом электромотора со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента. Следует отметить, что значение Tm2* второго целевого крутящего момента представляет собой положительный крутящий момент на дороге, идущей в подъем, и отрицательный крутящий момент на дороге, идущей под спуск, и сходится почти к нулю на ровной дороге, чтобы поддерживать состояние остановки транспортного средства.
[0077] Далее описываются преимущества, когда устройство управления для электромоторного транспортного средства согласно варианту осуществления применяется к электротранспортному средству, в частности, описывается управление в ходе торможения тормозом со ссылкой на фиг. 11 и фиг. 12.
[0078] Фиг. 11 являются схемами, иллюстрирующими примеры результатов управления посредством устройства управления для электромоторного транспортного средства согласно варианту осуществления. Фиг. 11 иллюстрирует результаты управления, когда транспортное средство останавливается на дорогах, идущих в подъем, с постоянным уклоном. Фиг. 11 показывает величину торможения, скорость вращения электромотора, значение команды управления крутящим моментом электромотора и продольное ускорение транспортного средства в вышеуказанном порядке. Пунктирная линия на схеме, выражающей значение команды управления крутящим моментом электромотора, показывает оцененное значение возмущающего крутящего момента, а штрихпунктирная линия выражает возмущения градиента.
[0079] Во время t0, электромотор 4 замедляется на основе значения Tm1* первого целевого крутящего момента, вычисленного на этапе S202 на фиг. 2. Оцененное значение возмущающего крутящего момента совпадает с возмущениями градиента. Можно видеть, что возмущения градиента на дороге, идущей в подъем, могут точно оцениваться.
[0080] Во время t1, когда водитель нажимает педаль тормоза, величина B торможения увеличивается. В это время, можно видеть, что использование значения Tm1* первого целевого крутящего момента и величины B торможения в комбинации увеличивает продольное ускорение транспортного средства на стороне торможения, а именно, в отрицательном направлении.
[0081] Во время t2, электромотор 4 замедляется на основе значения Tm2* второго целевого крутящего момента, вычисленного на этапе S203 на фиг. 2. В это время, оцененное значение возмущающего крутящего момента, составляющее значение Tm2* второго целевого крутящего момента, учитывает величину B торможения в процессе посредством блока 502 управления на фиг. 7. Соответственно, оцененное значение возмущающего крутящего момента совпадает с возмущениями градиента независимо от увеличения величины B торможения.
[0082] Во время t3, продольное ускорение транспортного средства и скорость вращения электромотора сходятся к 0. Можно видеть, что транспортное средство останавливается с совпадением оцененного значения возмущающего крутящего момента и возмущений градиента.
[0083] Во время t4, хотя величина B торможения сбрасывается посредством операции нажатия педали тормоза водителем, величина B торможения компенсируется из оцененного значения возмущающего крутящего момента. Соответственно, можно видеть, что может поддерживаться состояние, в котором оцененное значение возмущающего крутящего момента совпадает с возмущениями градиента. Даже во время t4 и после времени t4, продольное ускорение транспортного средства и скорость вращения электромотора по-прежнему сходятся к 0. Можно видеть, что может поддерживаться состояние остановки транспортного средства.
[0084] Далее описываются результаты управления в случае, если величина B торможения не учитывается для того, чтобы вычислять оцененное значение возмущающего крутящего момента, в качестве сравнительного примера со ссылкой на фиг. 12.
[0085] Во время t0, электромотор 4 замедляется на основе значения Tm1* первого целевого крутящего момента, вычисленного на этапе S202 на фиг. 2. В этот момент времени, оцененное значение возмущающего крутящего момента совпадает с возмущениями градиента. Можно видеть, что возмущения градиента на дороге, идущей в подъем, могут точно оцениваться.
[0086] Во время t1, величина B торможения увеличивается посредством операции нажатия педали тормоза водителем. В это время, можно видеть, что использование значения Tm1* первого целевого крутящего момента и величины B торможения в комбинации увеличивает продольное ускорение транспортного средства на стороне торможения.
[0087] Во время t2, электромотор 4 замедляется на основе значения Tm2* второго целевого крутящего момента, вычисленного на этапе S203 на фиг. 2. В этом сравнительном примере, блок 502 управления на фиг. 7 не учитывает величину B торможения. Соответственно, тормозная сила посредством величины B торможения ошибочно распознается в качестве возмущений, вызываемых посредством градиента. Соответственно, оцененное значение возмущающего крутящего момента указывает значение, превышающее возмущения фактического градиента. Можно видеть, что оцененное значение возмущающего крутящего момента ошибочно оценивает то, что дорога представляет собой дорогу с крутым подъемом, превышающим фактический градиент.
[0088] Во время t3, продольное ускорение транспортного средства и скорость вращения электромотора сходятся к 0. Можно видеть, что использование оцененного значения возмущающего крутящего момента и величины B торможения в комбинации поддерживает состояние остановки транспортного средства.
[0089] Во время t4, операция нажатия педали тормоза водителем сбрасывает величину B торможения. В это время, оцененное значение возмущающего крутящего момента ошибочно оценивает то, что дорога представляет собой дорогу с крутым подъемом, превышающим фактический градиент. Следовательно, когда величина B торможения сбрасывается, продольное ускорение транспортного средства увеличивается на приводящей стороне, и после этого транспортное средство движется вперед. Можно видеть, что состояние остановки транспортного средства не может поддерживаться.
[0090] Как описано выше, согласно первому варианту осуществления, устройство управления для электромоторного транспортного средства, использующего электромотор в качестве источника приведения в движение и выполненного с возможностью замедляться посредством рекуперативной тормозной силы из электромотора, определяет рабочую величину нажатия педали акселератора, вычисляет оцененное значение возмущающего крутящего момента и определяет или оценивает компонент сопротивления, не связанный с градиентом, из состояния транспортного средства. Устройство управления для электромоторного транспортного средства корректирует оцененное значение возмущающего крутящего момента согласно определенному или оцененному компоненту сопротивления, не связанному с градиентом. Электромотор управляется на основе значения команды управления крутящим моментом электромотора. Когда рабочая величина нажатия педали акселератора равна или меньше предварительно определенного значения, и электромоторное транспортное средство находится в момент времени непосредственно перед остановкой транспортного средства, значение команды управления крутящим моментом электромотора сходится к оцененному значению скорректированного возмущающего крутящего момента в сочетании с уменьшением скорости вращения электромотора. Это позволяет добиваться плавного замедления без вибрации при ускорении в продольном направлении непосредственно перед остановкой транспортного средства. Устройство управления для электромоторного транспортного средства определяет или оценивает сопротивления, не связанные с градиентом (к примеру, величину торможения, сопротивление воздуха, сопротивление качения и сопротивление повороту), из состояния транспортного средства, чтобы корректировать оцененное значение возмущающего крутящего момента. Это обеспечивает возможность совпадения оцененного значения возмущающего крутящего момента с возмущениями градиента, за счет этого обеспечивая поддержание состояния остановки транспортного средства на дорогах с уклоном.
[0091] Следует отметить, что рабочая величина нажатия педали акселератора равна или меньше предварительно определенного значения для рабочей величины нажатия педали акселератора, когда транспортное средство движется надлежащим образом на низкой скорости (например, скорости 15 км/ч или меньше) без вмешательства тормозного устройства, отдельного от рекуперативного торможения. Следует отметить, что, разумеется, примерная скорость транспортного средства является одним примером.
[0092] Первый вариант осуществления вычисляет оцененное значение тормозного крутящего момента из величины торможения для того, чтобы корректировать оцененное значение возмущающего крутящего момента на основе оцененного значения тормозного крутящего момента. Соответственно, даже если тормозная сила, отличная от рекуперативного торможения посредством электромотора, прикладывается к транспортному средству, величина торможения может компенсироваться из оцененного значения возмущающего крутящего момента. Это обеспечивает поддержание состояния остановки транспортного средства, даже если величина торможения сбрасывается после остановки транспортного средства.
[0093] При использовании первого варианта осуществления, определяется рабочая величина нажатия педали тормоза водителем, и величина торможения определяется на основе определенной рабочей величины нажатия педали тормоза. Это обеспечивает возможность коррекции оцененного значения возмущающего крутящего момента на основе значения датчика, определенного посредством датчика давления тормозной жидкости, датчика хода педали тормоза или аналогичного устройства, за счет этого обеспечивая оценку возмущающего крутящего момента на основе фактического измеренного значения транспортного средства.
[0094] Величина торможения может определяться на основе значения команды управления относительно операции нажатия педали тормоза (к примеру, значения команды управления величины торможения). Это обеспечивает оценку оцененного значения возмущающего крутящего момента без мертвого времени, такого как задержка на определение посредством датчика.
[0095] При использовании первого варианта осуществления, величина торможения определяется с учетом скорости отклика от момента, когда величина торможения вводится в транспортное средство, до момента, когда тормозная сила действует на транспортное средство. Соответственно, например, вычисление величины торможения с рассмотрением скорости отклика, к примеру, от момента ввода значения команды управления во фрикционный тормоз до момента, когда давление жидкости реагирует на команду, и от момента формирования давления жидкости, до момента, когда давление жидкости действует на тормозную силу транспортного средства, обеспечивает ограничение ошибки модели между моделью транспортного средства и фактическим транспортным средством.
[0096] При использовании первого варианта осуществления, знак для оцененного значения тормозного крутящего момента отличается в зависимости от направления движения транспортного средства. Соответственно, оцененное значение тормозного крутящего момента может надлежащим образом оцениваться как при движении вперед, так и при откате назад транспортного средства.
[0097] Кроме того, первый вариант осуществления вычисляет оцененное значение тормозного крутящего момента с использованием фильтра, включающего в себя модель Gb(s) для передаточной характеристики от момента ввода величины торможения в транспортное средство до момента скорости вращения электромотора. Это обеспечивает точную компенсацию величины торможения из оцененного значения возмущающего крутящего момента.
[0098] Первый вариант осуществления дополнительно использует фильтр, имеющий передаточную характеристику H(s)/Gp(s), которая состоит из фильтра H(s) нижних частот и обратной системы модели Gp(s) для передаточной характеристики от момента ввода крутящего момента в транспортное средство до момента скорости вращения электромотора, чтобы вычислять оцененное значение тормозного крутящего момента. Это обеспечивает еще более точную компенсацию величины торможения из оцененного значения возмущающего крутящего момента.
[0099] Второй вариант осуществления
Устройство управления для электромоторного транспортного средства по второму варианту осуществления совместно использует управление демпфированием вибрации в дополнение к вышеописанному первому варианту осуществления. Далее описывается устройство управления для электромоторного транспортного средства в этом варианте осуществления, в частности, аспекты комбинированного использования управления демпфированием вибрации.
[0100] Фиг. 13 является блок-схемой последовательности операций способа, осуществляемого посредством контроллера 2 электромотора, содержащего устройство управления для электромоторного транспортного средства по второму варианту осуществления. В дополнение к управляющей последовательности в первом варианте осуществления, проиллюстрированной на фиг. 2, процесс управления демпфированием вибрации выполняется на этапе S203a.
[0101] Как проиллюстрировано на фиг. 13, процесс на этапе S203a выполняется после этапа S203 (процесс управления остановкой). Этот вариант осуществления задает значение Tm* команды управления крутящим моментом электромотора, вычисленное на этапе S203 в вышеописанном первом варианте осуществления, т.е. значение Tm* команды управления крутящим моментом электромотора (см. фиг. 7), которое является выводом из модуля 504 сравнения крутящих моментов, в качестве значения Tm3* третьего целевого крутящего момента (см. фиг. 14). Посредством выполнения процесса управления демпфированием вибрации для значения Tm3* третьего целевого крутящего момента, получается значение Tm* команды управления крутящим моментом электромотора.
[0102] Более конкретно, на этапе S203a, значение Tm3* команды управления крутящим моментом электромотора, вычисленное на этапе S203, и скорость ωm вращения электромотора вводятся в блок 1501 управления демпфированием вибрации (см. фиг. 15). Блок 1501 управления демпфированием вибрации вычисляет значение Tm* команды управления крутящим моментом электромотора после управления демпфированием вибрации, которое уменьшает вибрацию системы передачи крутящего момента (к примеру, крутильную вибрацию ведущего вала) без ухудшения отклика крутящего момента ведущего вала. Далее описывается пример процесса управления демпфированием вибрации, выполняемого посредством блока 1501 управления демпфированием вибрации, со ссылкой на фиг. 16.
[0103] Фиг. 16 является блок-схемой процесса управления демпфированием вибрации, используемого в этом варианте осуществления. Модуль 1601 компенсации с прямой связью (в дальнейшем называемый "модулем F/F-компенсации") выступает в качестве фильтра, имеющего передаточную характеристику Gr(s)/Gp(s), которая состоит из передаточной характеристики Gr(s) и обратной системы модели Gp(s) для передаточной характеристики от момента ввода крутящего момента в транспортное средство до момента скорости вращения электромотора. Посредством ввода значения Tm3* третьего целевого крутящего момента и выполнения процесса фильтрации, выполняется процесс управления демпфированием вибрации посредством компенсации с прямой связью. Используемая передаточная характеристика Gr(s) может выражаться посредством следующего уравнения (17).
[0104] уравнение 17

[0105] Следует отметить, что F/F по управлению демпфированием вибрации, выполняемая посредством модуля 1601 F/F-компенсации, может представлять собой управление демпфированием вибрации, описанное в JP2001-45613A, или может представлять собой управление демпфированием вибрации, описанное в JP2002-152916A.
[0106] Блоки 1603 и 1604 управления представляют собой фильтры, используемые для управления с обратной связью (в дальнейшем, обратная связь называется "F/B"). Блок 1603 управления представляет собой фильтр, имеющий вышеописанную передаточную характеристику Gp(s). Блок 1603 управления вводит значение, полученное посредством суммирования вывода из модуля 1601 F/F-компенсации, который выводится из сумматора 1605, с выводом из блока 1604 управления, описанного ниже, и выполняет процесс фильтрации. Вычитатель 1606 вычитает скорость ωm вращения электромотора из значения, выводимого из блока 1603 управления. Вычитаемое значение вводится в блок 1604 управления. Блок 1604 управления представляет собой фильтр, имеющий передаточную характеристику H(s)/Gp(s), которая состоит из фильтра H(s) нижних частот и обратной системы модели Gp(s) для передаточной характеристики от момента ввода крутящего момента в транспортное средство до момента скорости вращения электромотора. Блок 1604 управления вводит вывод из вычитателя 1606, выполняет процесс фильтрации и выводит значение, вычисляемое как крутящий момент F/B-компенсации, в сумматор 1605.
[0107] Сумматор 1605 суммирует значение Tm3* третьего целевого крутящего момента, для которого выполнен процесс управления демпфированием вибрации посредством F/F-компенсации, с вышеописанным значением, вычисляемым как крутящий момент F/B-компенсации, чтобы вычислять значение Tm* команды управления крутящим моментом электромотора, чтобы уменьшать вибрации в системе передачи крутящего момента для транспортного средства.
[0108] Следует отметить, что управление демпфированием вибрации, выполняемое посредством блока 1501 управления демпфированием вибрации, может представлять собой управление демпфированием вибрации, описанное в JP2003-9566A, или может представлять собой управление демпфированием вибрации, описанное в JP2010-288332A.
[0109] Для комбинированного использования управления демпфированием вибрации (модуля F/F-компенсации), посредством алгоритма управления демпфированием вибрации, модель Gp(s) транспортного средства, выражаемая посредством уравнения (14) в первом варианте осуществления, может рассматриваться в качестве передаточной характеристики Gr(s), указываемой в уравнении (17). В частности, фильтр, имеющий передаточную характеристику H(s)/Gp(s), которая показана в блоке 801 управления на фиг. 9, может рассматриваться в качестве фильтра, имеющего передаточную характеристику H(s)/Gr(s), как проиллюстрировано в блоке 1701 управления на фиг. 17.
[0110] В дальнейшем описывается способ для вычисления оцененного значения тормозного крутящего момента для комбинированного использования управления демпфированием вибрации (модуля F/B-компенсации).
[0111] Фиг. 18 является блок-схемой, описывающей вычисление оцененного значения тормозного крутящего момента при комбинированном использовании управления демпфированием вибрации.
[0112] Блок 1001 управления задает предыдущее значение для оцененного значения скорости вращения тормоза с учетом мертвого времени. Следует отметить, что мертвое время здесь представляет собой, например, задержку на определение посредством датчика транспортного средства.
[0113] Блок 1002 управления выполняет процесс GFB(s) управления демпфированием вибрации (модуля F/B-компенсации) согласно предыдущему значению для оцененного значения скорости вращения тормоза, заданного посредством блока 1001 управления, чтобы вычислять оцененное значение TF/B крутящего момента управления демпфированием вибрации. Далее описываются дополнительные подробности со ссылкой на фиг. 19.
[0114] Фиг. 19 является схемой, описывающей подробности процесса GFB(s) управления демпфированием вибрации (модуля F/B-компенсации), выполняемого посредством блока 1002 управления. Блок 1901 управления представляет собой фильтр, имеющий передаточную характеристику H(s)/Gp(s). Как описано выше, Gp(s) представляет собой модель для передаточной характеристики от момента ввода крутящего момента в транспортное средство до момента скорости вращения электромотора. H(s) представляет собой фильтр нижних частот, имеющий такую передаточную характеристику, что разность между его степенью знаменателя и степенью числителя не меньше разности между степенью знаменателя и степенью числителя модели Gp(s). Блок 1902 управления представляет собой фильтр, имеющий передаточную характеристику Gp(s), и выводит значение, полученное посредством ввода вывода из блока 1901 управления и выполнения процесса фильтрации для входного значения в вычитатель 1900. Вычитатель 1900 вычитает предыдущее значение для оцененного значения скорости вращения тормоза из значения, выводимого из блока 1902 управления, чтобы выводить полученное значение через вычитание в блок 1901 управления. Соответственно, оцененное значение TF/B крутящего момента управления демпфированием вибрации, для которого выполнен процесс управления демпфированием вибрации (модуля F/B-компенсации), может вычисляться из оцененного значения скорости вращения тормоза.
[0115] Следует отметить, что аналогично процессу управления демпфированием вибрации на этапе 203a на фиг. 13, управление демпфированием вибрации (модуль F/B-компенсации) может представлять собой управление демпфированием вибрации, описанное в JP2003-9566A, или может представлять собой управление демпфированием вибрации, описанное в JP2010-288332A.
[0116] Снова ссылаясь на фиг. 18, пояснение продолжается. Блок 1003 управления выполняет процесс относительно передаточной характеристики Gb(s), указываемой в уравнении (12), согласно величине B торможения, значению TF/B команды управления крутящим моментом управления демпфированием вибрации и скорости ωm вращения колес, чтобы вычислять оцененное значение скорости вращения тормоза после управления демпфированием вибрации.
[0117] Блок 1004 управления выполняет процесс фильтрации для оцененного значения скорости вращения тормоза после управления демпфированием вибрации посредством фильтра, имеющего передаточную характеристику H(s)/Gr(s), который состоит из фильтра H(s) нижних частот и обратной системы вышеописанного Gr(s), чтобы вычислять оцененное значение тормозного крутящего момента. Вычисленное оцененное значение тормозного крутящего момента выводится в сумматор/вычитатель 804 на фиг. 17, аналогично первому варианту осуществления, так что оно суммируется со значением, полученным посредством вычитания первого оцененного значения крутящего момента электромотора из второго оцененного значения крутящего момента электромотора.
[0118] Когда используется технология демпфирования вибрации, которая уменьшает крутильную вибрацию ведущего вала, второй вариант осуществления вычисляет оцененное значение тормозного крутящего момента с использованием модели передаточной характеристики с учетом управления демпфированием вибрации. Это обеспечивает возможность точной компенсации величины торможения из оцененного значения возмущающего крутящего момента также в случае, если используется управление демпфированием вибрации.
[0119] Настоящее изобретение не ограничено вышеописанными вариантами осуществления, и возможны различные модификации и варианты применения. Например, вышеприведенное пояснение описывает то, что когда рабочая величина нажатия педали акселератора равна или меньше предварительно определенного значения, и электромоторное транспортное средство находится в момент времени непосредственно перед остановкой транспортного средства, значение Tm* команды управления крутящим моментом электромотора сходится к скорректированному значению Td команды управления возмущающим крутящим моментом в сочетании с уменьшением скорости вращения электромотора 4. Тем не менее, параметры скорости, такие как скорость вращения колес, скорость кузова транспортного средства и скорость вращения ведущего вала, находятся в пропорциональной взаимосвязи со скоростью вращения электромотора 4. Соответственно, значение Tm* команды управления крутящим моментом электромотора может сходиться к оцененному значению Td возмущающего крутящего момента в сочетании с уменьшением параметра скорости, который является пропорциональным скорости вращения электромотора 4.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство управления для электромоторного транспортного средства и способ управления для электромоторного транспортного средства
Устройство управления для электромоторного транспортного средства и способ управления для электромоторного транспортного средства
Устройство управления приводом электрического транспортного средства и способ управления приводом электрического транспортного средства
Способ управления для электрического транспортного средства и устройство управления для электрического транспортного средства
Антитело к notch4 человека

