Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОМОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОМОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления для электромоторного транспортного средства и к способу управления для электромоторного транспортного средства.
Уровень техники
[0002] Традиционно известно устройство управления рекуперативного тормоза для электромобилей, которое содержит средство задания, допускающее произвольное задание рекуперативной тормозной силы электромотора, и выполняет рекуперацию электромотора посредством рекуперативной тормозной силы, заданной посредством средства задания (см. JP8-79907A).
Сущность изобретения
[0003] Тем не менее, если рекуперативная тормозная сила, заданная посредством средства задания, является большой, возникает проблема формирования вибрации в продольном направлении кузова транспортного средства, когда электромобиль замедляется посредством заданной рекуперативной тормозной силы, и скорость становится нулевой.
[0004] Настоящее изобретение направлено на предоставление технологии для подавления формирования вибрации в продольном направлении кузова транспортного средства при остановке электромоторного транспортного средства за счет рекуперативной тормозной силы.
[0005] Устройство для управления электромобилем согласно варианту осуществления представляет собой устройство управления для электромоторного транспортного средства, использующего электромотор 4 в качестве источника приведения в движение, и выполнено с возможностью замедляться посредством рекуперативной тормозной силы электромотора 4, вычислять значение первого целевого крутящего момента на основе информации транспортного средства и вычислять значение второго целевого крутящего момента, которое сходится к нулю с уменьшением параметра скорости, пропорционального скорости движения электромоторного транспортного средства. Если определяется то, что транспортное средство не достигло момента непосредственно перед остановкой, значение первого целевого крутящего момента задается в качестве значения команды управления крутящим моментом электромотора. Если определяется то, что транспортное средство должно остановиться в ближайшее время, значение второго целевого крутящего момента задается в качестве значения команды управления крутящим моментом электромотора. Электромотор 4 управляется на основе заданного значения команды управления крутящим моментом электромотора.
[0006] Ниже подробно описываются варианты осуществления настоящего изобретения и преимущества настоящего изобретения вместе с прилагаемыми чертежами.
Краткое описание чертежей
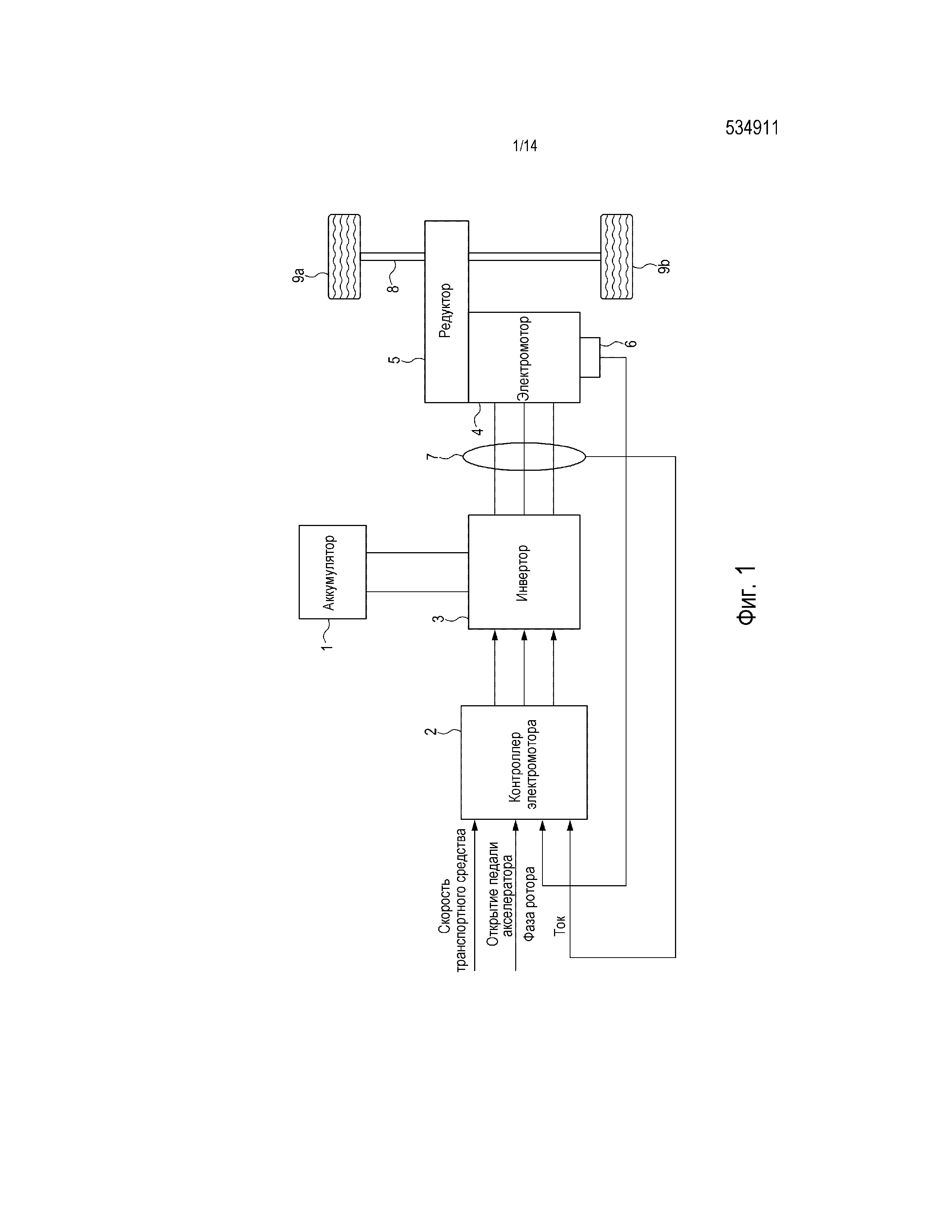
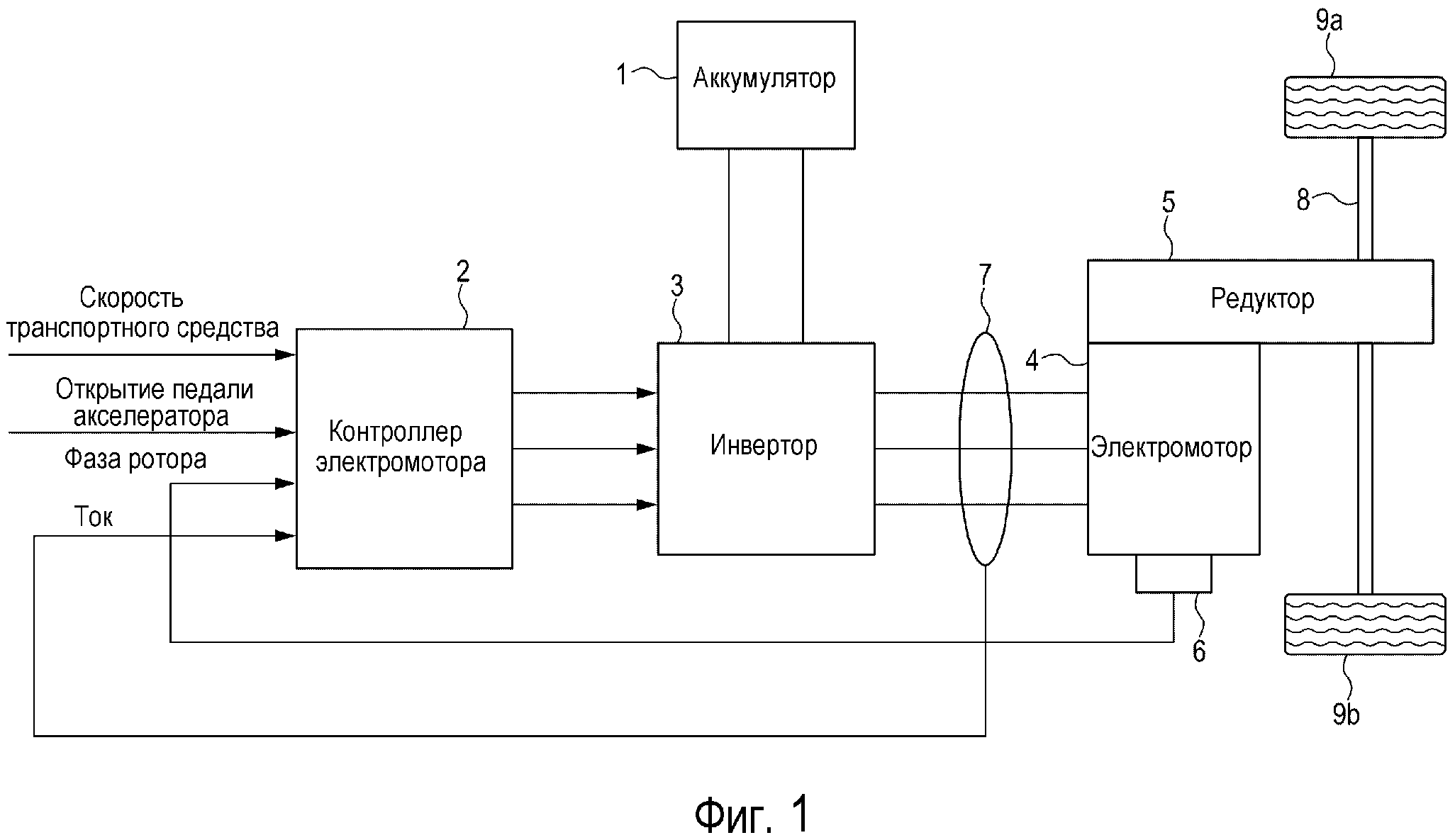
[0007] Фиг. 1 является блок-схемой, показывающей основную конфигурацию электромобиля с устройством управления для электромоторного транспортного средства в одном варианте осуществления,
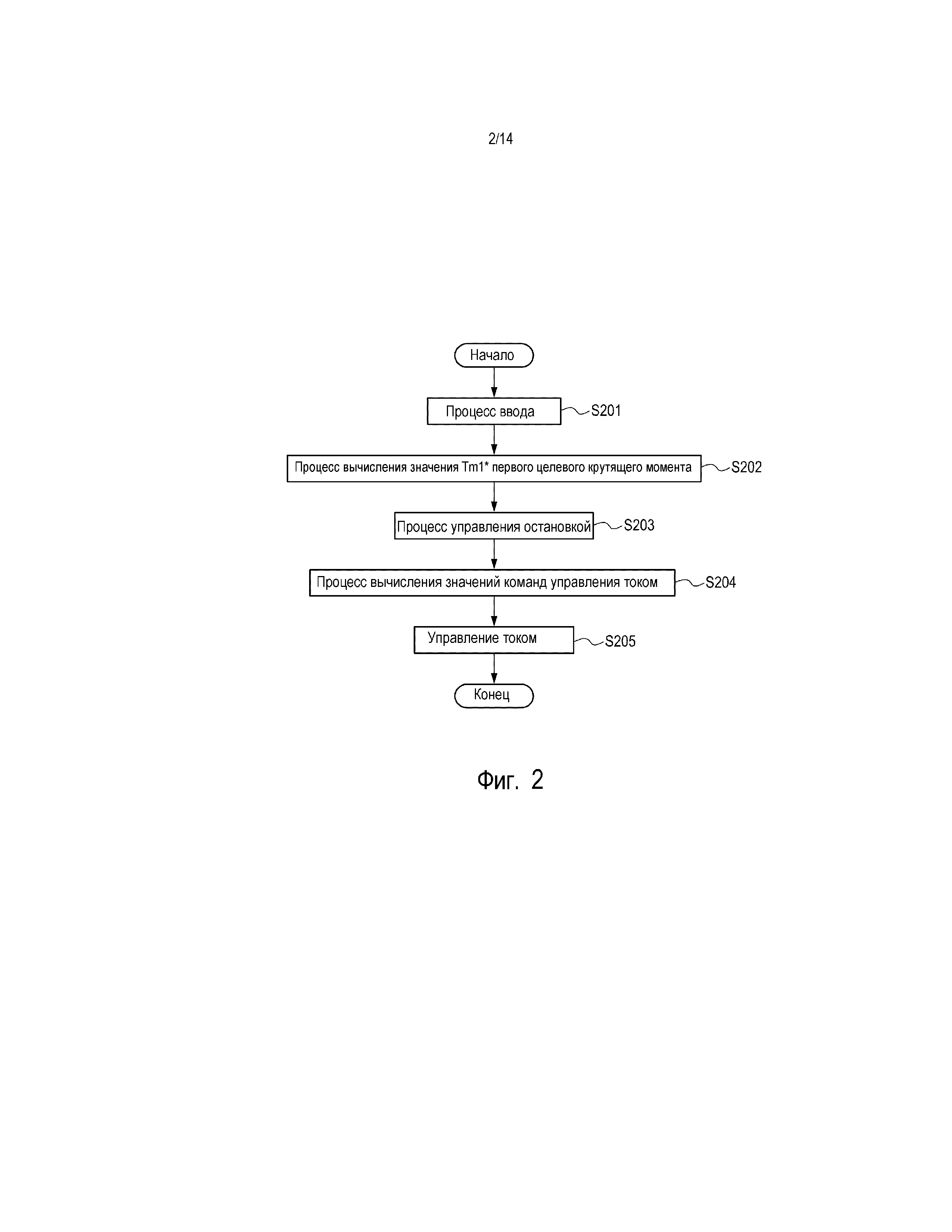
Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций процесса управления током электромотора, выполняемого посредством контроллера электромотора,
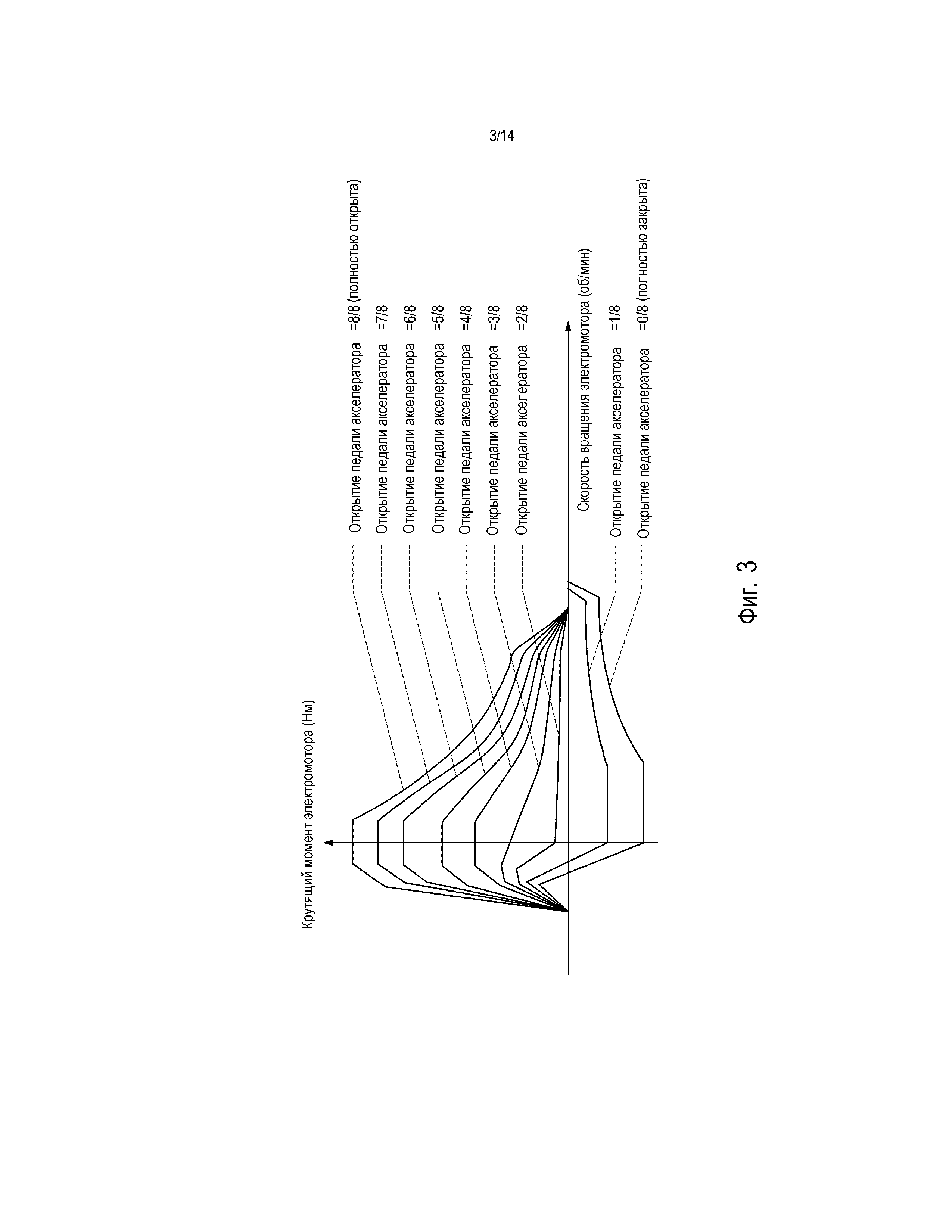
Фиг. 3 является графиком, показывающим пример таблицы крутящих моментов в зависимости от открытия педали акселератора,
Фиг. 4 является блок-схемой, подробно показывающей способ для задания значения Tm1* первого целевого крутящего момента,
Фиг. 5 является блок-схемой, показывающей подробную конфигурацию модуля оценки возмущающих крутящих моментов,
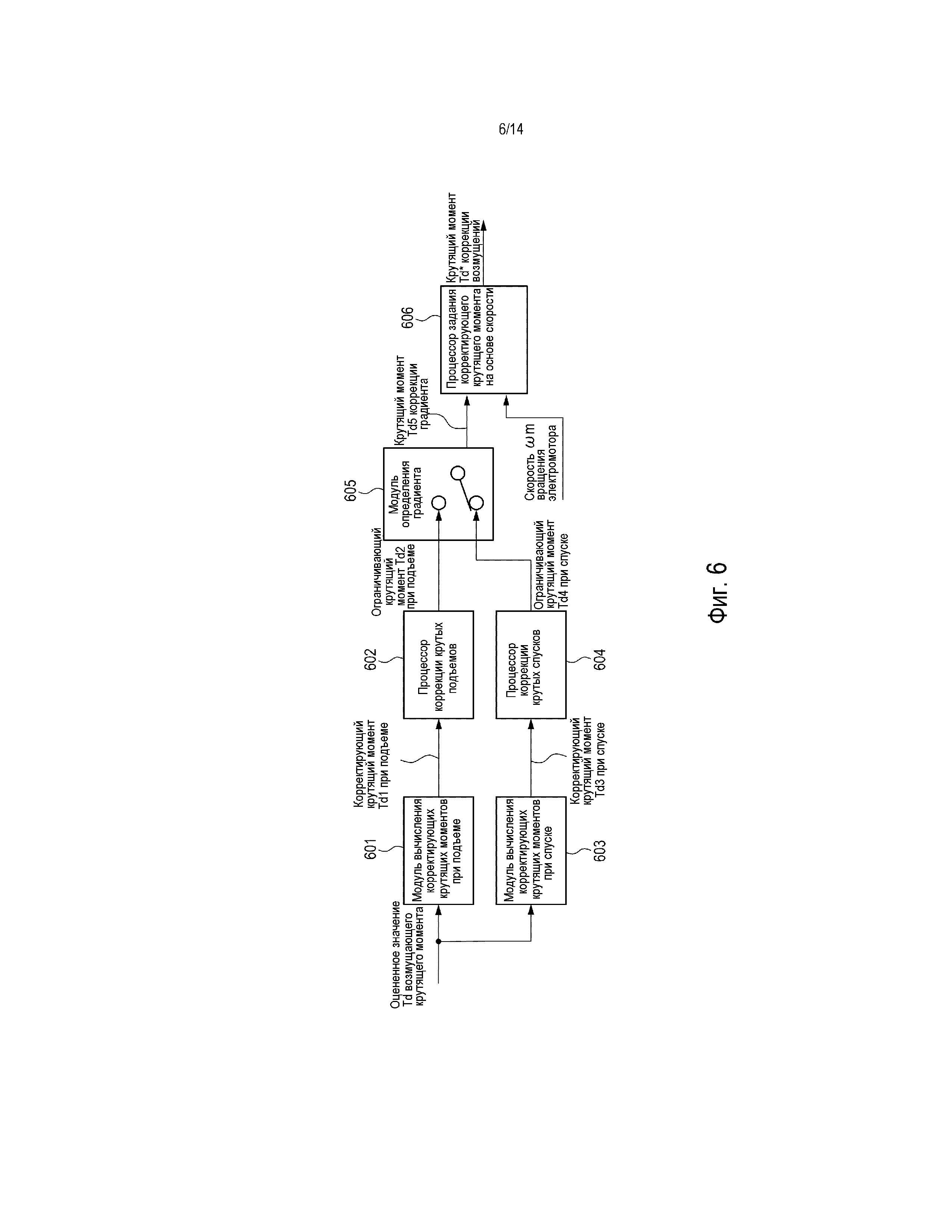
Фиг. 6 является блок-схемой, показывающей подробную конфигурацию модуля задания крутящих моментов коррекции возмущений,
Фиг. 7 является графиком, показывающим пример таблицы, задающей взаимосвязь оцененного значения Td возмущающего крутящего момента и крутящего момента Td5 коррекции градиента,
Фиг. 8 показывает пример таблицы, задающей взаимосвязь скорости ωm вращения электромотора и корректирующего усиления Kω на основе скорости,
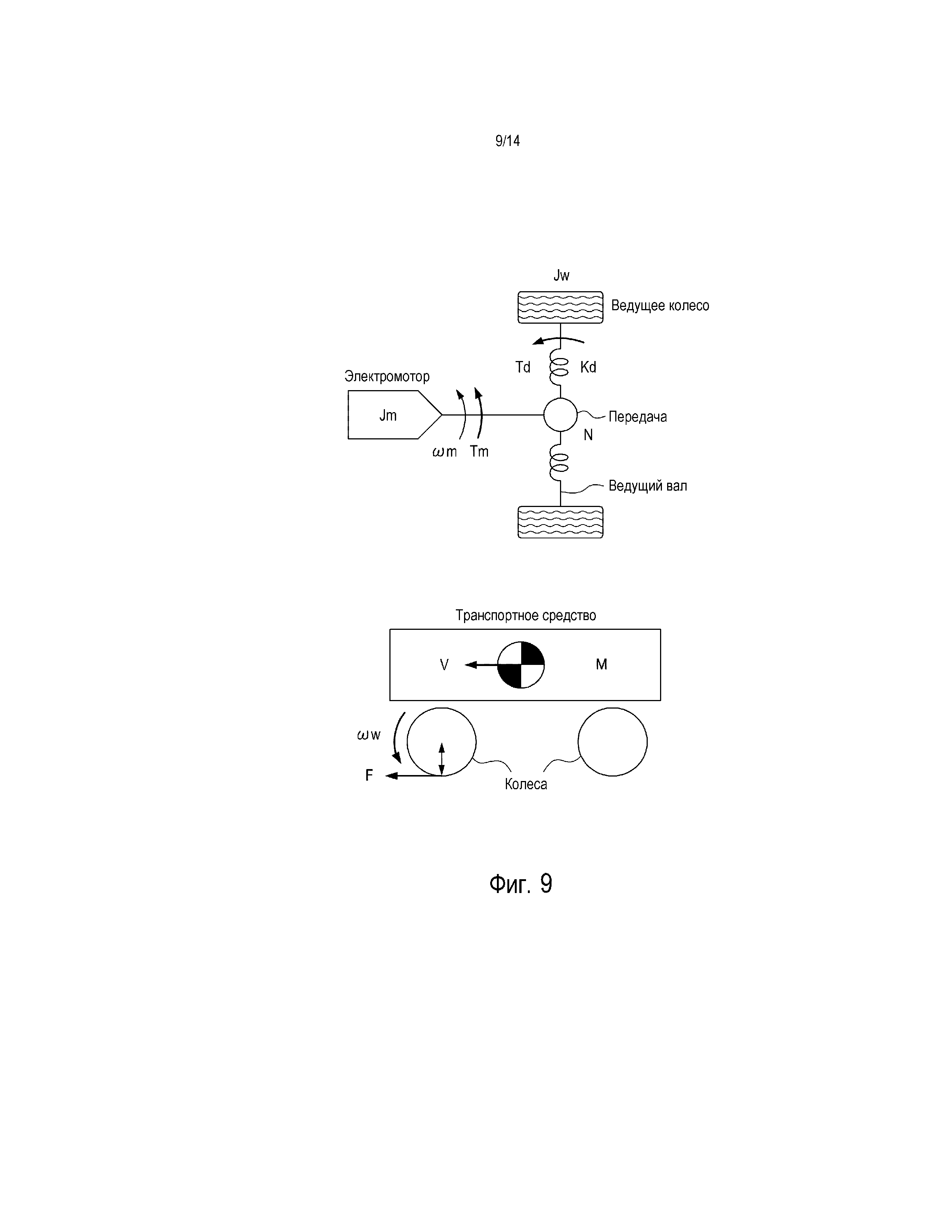
Фиг. 9 является схемой, моделирующей систему трансмиссии для передачи движущей силы транспортного средства,
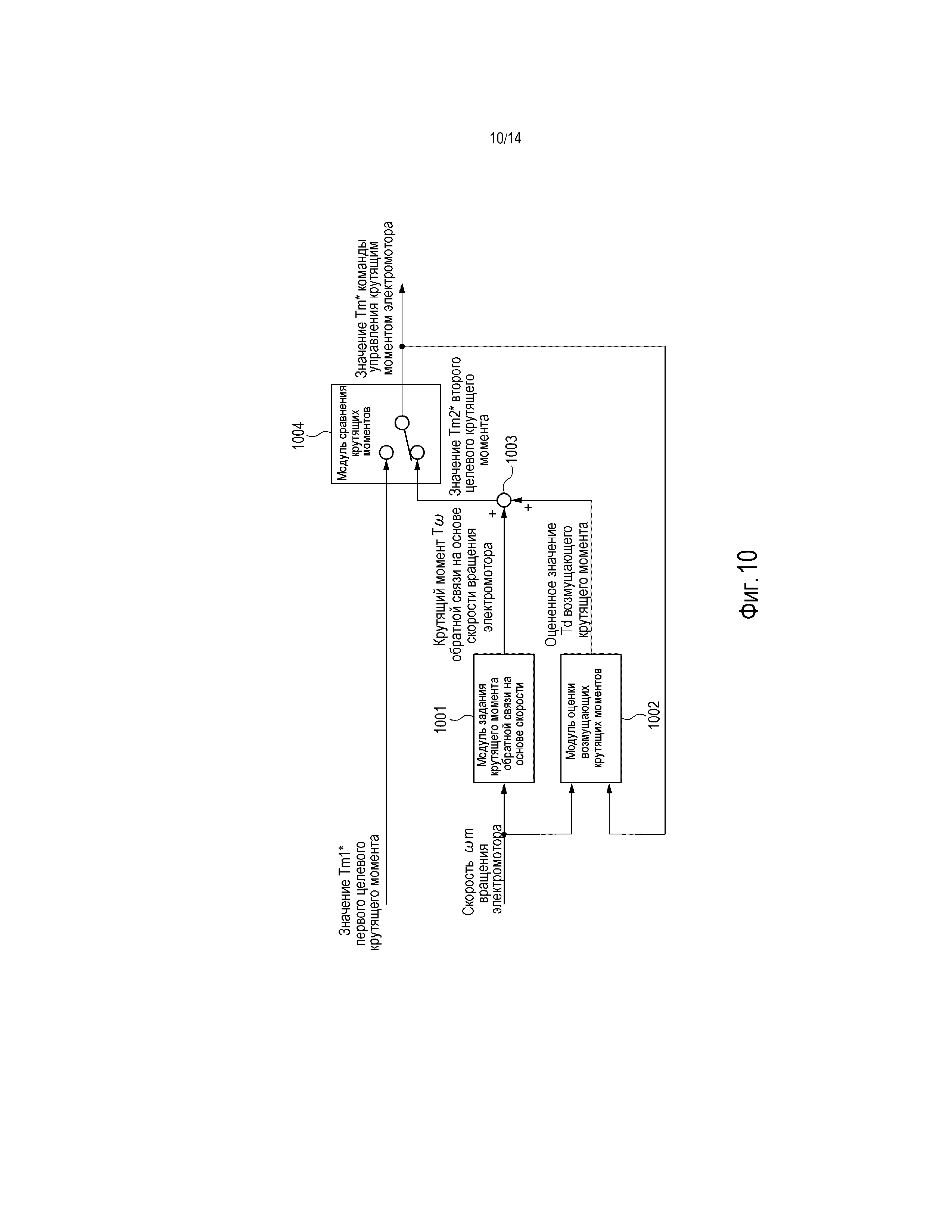
Фиг. 10 является блок-схемой для реализации процесса управления остановкой,
Фиг. 11 является схемой, показывающей способ для вычисления крутящего момента Tω обратной связи на основе скорости вращения электромотора на основе определенной скорости ωm вращения электромотора,
Фиг. 12 является диаграммой, показывающей результаты управления для управления остановкой для остановки электромоторного транспортного средства на дороге, идущей в подъем,
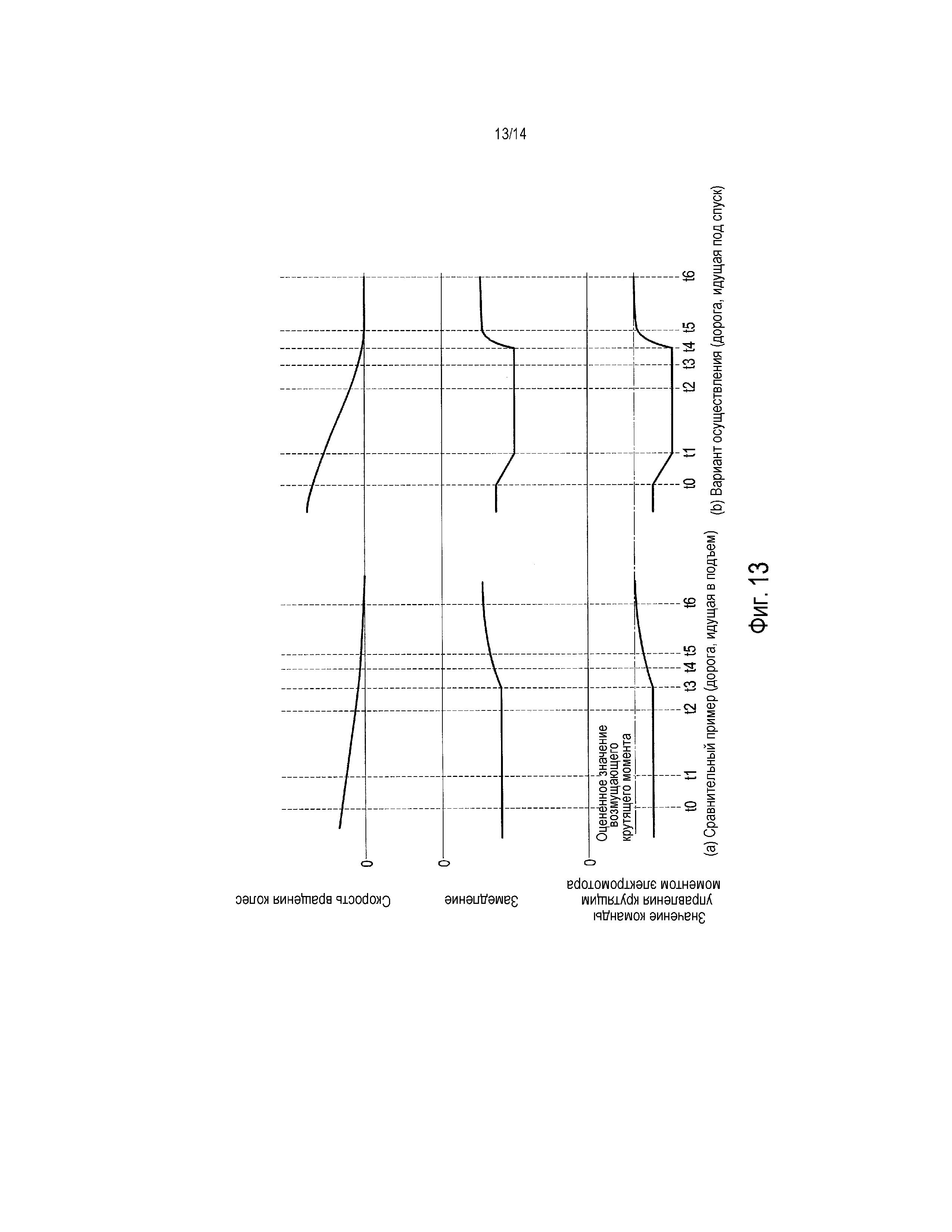
Фиг. 13 является диаграммой, показывающей результаты управления для управления остановкой для остановки электромоторного транспортного средства на дороге, идущей под спуск, и
Фиг. 14 является блок-схемой для реализации процесса управления остановкой в случае задания крутящего момента Tω обратной связи на основе скорости вращения электромотора в качестве значения Tm2* второго целевого крутящего момента.
Подробное описание вариантов осуществления
[0008] Фиг. 1 является блок-схемой, показывающей основную конфигурацию электромобиля с устройством управления для электромоторного транспортного средства в одном варианте осуществления. Устройство управления для электромоторного транспортного средства настоящего изобретения включает в себя электромотор в качестве части или всего источника приведения в движение транспортного средства и является применимым к электромоторному транспортному средству, допускающему движение посредством движущей силы электромотора. Электромоторные транспортные средства включают в себя не только электромобили, но также гибридные транспортные средства и транспортные средства на топливных элементах. В частности, устройство управления для электромоторного транспортного средства в настоящем варианте осуществления может применяться к транспортному средству, допускающему управление ускорением/замедлением и остановкой транспортного средства только посредством операции нажатия педали акселератора. В этом транспортном средстве водитель нажимает педаль акселератора в ходе ускорения и уменьшает или обнуляет величину нажатия педали акселератора в ходе замедления или в ходе остановки.
[0009] Контроллер 2 электромотора имеет сигналы, указывающие состояния транспортного средства, такие как скорость V транспортного средства, открытие AP педали акселератора, фаза α ротора электромотора 4 (трехфазного электромотора переменного тока) и токи iu, iv и iw электромотора 4, вводимые в него в форме цифровых сигналов, и формирует PWM-сигналы для управления электромотором 4 на основе входных сигналов. Дополнительно, контроллер 2 электромотора формирует сигнал приведения в действие для инвертора 3 в соответствии со сформированными PWM-сигналами.
[0010] Инвертор 3 включает в себя, например, два переключающих элемента (например, силовые полупроводниковые элементы, такие как IGBT или MOSFET-транзисторы) для каждой фазы, преобразует постоянный ток, подаваемый из аккумулятора 1, в переменный ток посредством включения и выключения переключающих элементов в соответствии с сигналом приведения в действие, и заставляет требуемый ток протекать в электромотор 4.
[0011] Электромотор 4 формирует движущую силу посредством переменного тока, подаваемого из инвертора 3, и передает движущую силу на левое и правое ведущие колеса 9a, 9b через редуктор 5 и ведущий вал 8. Дополнительно, при вращении согласно вращению ведущих колес 9a, 9b во время движения транспортного средства, электромотор 4 формирует рекуперативную движущую силу, в силу этого собирая кинетическую энергию транспортного средства в качестве электроэнергии. В этом случае, инвертор 3 преобразует переменный ток, сформированный во время работы в рекуперативном режиме электромотора 4, в постоянный ток и подает его в аккумулятор 1.
[0012] Датчик 7 тока определяет трехфазные переменные токи iu, iv и iw, протекающие в электромоторе 4. Тем не менее, поскольку сумма трехфазных переменных токов равна 0, токи двух произвольных фаз могут определяться, и ток оставшейся одной фазы может получаться посредством вычисления.
[0013] Датчик 6 вращения, например, представляет собой круговой датчик позиции или датчик позиции и определяет фазу α ротора электромотора 4.
[0014] Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций процесса управления током электромотора, выполняемого посредством контроллера 2 электромотора.
[0015] На этапе S201, вводятся сигналы, указывающие состояния транспортного средства. Здесь, вводятся скорость V транспортного средства (км/ч), открытие AP педали акселератора (%), фаза α ротора (рад) электромотора 4, скорость Nm вращения (об/мин) электромотора 4, трехфазные переменные токи iu, iv и iw, протекающие в электромоторе 4, и значение Vdc постоянного напряжения (В) между аккумулятором 1 и инвертором 3.
[0016] Скорость V транспортного средства (км/ч) получается посредством непроиллюстрированного датчика скорости транспортного средства или через обмен данными из другого контроллера. Альтернативно, скорость v транспортного средства (м/с) получается посредством умножения механической угловой скорости ωm ротора на динамический радиус R шины и деления произведения на передаточное отношение главной передачи и затем умножения на 3600/1000 для преобразования единиц измерения, за счет этого получая скорость V транспортного средства (км/ч).
[0017] Открытие AP педали акселератора (%) получается из непроиллюстрированного датчика открытия педали акселератора или через обмен данными из другого контроллера, такого как непроиллюстрированный контроллер транспортного средства.
[0018] Фаза α ротора (рад) электромотора 4 получается из датчика 6 вращения. Скорость Nm вращения (об/мин) электромотора 4 получается посредством деления угловой скорости ω ротора (электрического угла) на номер P полюсной пары электромотора 4, чтобы получать скорость ωm вращения электромотора (рад/с), которая является механической угловой скоростью электромотора 4, и умножения полученной скорости ωm вращения электромотора на 60/(2π). Угловая скорость ω ротора получается посредством дифференцирования фазы α ротора.
[0019] Токи iu, iv и iw(а), протекающие в электромоторе 4, получаются из датчика 7 тока.
[0020] Значение Vdc постоянного напряжения (В) получается из датчика напряжения (не показан), предоставленного в линии электропитания постоянного тока между аккумулятором 1 и инвертором 3, или значения напряжения питания, передаваемого из контроллера аккумулятора (не показан).
[0021] На этапе S202, задается значение Tm1* первого целевого крутящего момента. В частности, целевое значение Tm0* таблицы крутящих моментов (базовое значение целевого крутящего момента) сначала задается на основе открытия AP педали акселератора и скорости ωm вращения электромотора, вводимых на этапе S201, посредством обращения к таблице крутящих моментов в зависимости от открытия акселератора, показанной на фиг. 3. Затем, получается оцененное значение Td возмущающего крутящего момента, которое описывается ниже, и крутящий момент Td* коррекции возмущений получается на основе оцененного значения Td возмущающего крутящего момента. Затем значение Tm1* первого целевого крутящего момента задается посредством суммирования целевого значения T0* таблицы крутящих моментов и крутящего момента Td* коррекции возмущений.
[0022] На этапе S203, осуществляется процесс управления остановкой для того, чтобы выполнять такое управление, что электромоторное транспортное средство останавливается. В частности, момент непосредственно перед остановкой электромоторного транспортного средства оценен, значение Tm1* первого целевого крутящего момента, вычисленное на этапе S202, задается в качестве значения Tm* команды управления крутящим моментом электромотора до момента непосредственно перед остановкой, и значение Tm2* второго целевого крутящего момента, которое сходится к оцененному значению Td возмущающего крутящего момента с уменьшением скорости вращения электромотора, задается в качестве значения Tm* команды управления крутящим моментом электромотора после момента непосредственно перед остановкой. Это значение Tm2* второго целевого крутящего момента является положительным крутящим моментом на дороге, идущей в подъем, отрицательным крутящим моментом на дороге, идущей под спуск, и практически нулевым на ровной дороге. Таким образом, состояние остановки транспортного средства может поддерживаться независимо от градиента поверхности дороги, как описано ниже. Ниже описываются подробности процесса управления остановкой.
[0023] На этапе S204, целевое значение id* тока d-оси и целевое значение iq* тока q-оси получаются на основе значения Tm* целевого крутящего момента электромотора, вычисленного на этапе S203, скорости ωm вращения электромотора и значения Vdc постоянного напряжения. Например, таблица, задающая взаимосвязь целевого значения тока d-оси и целевого значения тока q-оси со значением команды управления крутящим моментом, скоростью вращения электромотора и значением постоянного напряжения, подготавливается заранее, и целевое значение id* тока d-оси и целевое значение iq* тока q-оси получаются посредством обращения к этой таблице.
[0024] На этапе S205, управление по току выполняется таким образом, чтобы сопоставлять ток id d-оси и ток iq d-оси с целевым значением id* тока d-оси и целевым значением iq* тока q-оси, полученными на этапе S204. С этой целью, ток id d-оси и ток iq d-оси сначала получаются на основе значений iu, iv и iw трехфазного переменного тока и фазы α ротора электромотора 4, вводимых на этапе S201. Затем, значения vd, vq команд управления напряжением d-оси и q-оси вычисляются из отклонений между значениями id*, iq* команд управления током d-оси и q-оси и токами id, iq d-оси и q-оси. Следует отметить, что напряжение помехозащищенности, необходимое для того, чтобы уравновешивать напряжение помех между ортогональными осями координат d-q, может суммироваться с вычисленными значениями vd, vq команд управления напряжением d-оси и q-оси.
[0025] После этого значения vu, vv и vw команд управления трехфазным переменным напряжением получаются из значений vd, vq команд управления напряжением d-оси и q-оси и фазы α ротора электромотора 4. Затем PWM-сигналы tu (%), tv (%) и tw (%) получаются из полученных значений vu, vv и vw команд управления трехфазным переменным напряжением и значения Vdc постоянного напряжения. Посредством открытия и закрытия переключающих элементов инвертора 3 посредством PWM-сигналов tu, tv и tw, полученных таким способом, электромотор 4 может приводиться в действие с требуемым крутящим моментом, инструктированным посредством значения Tm* команды управления крутящим моментом.
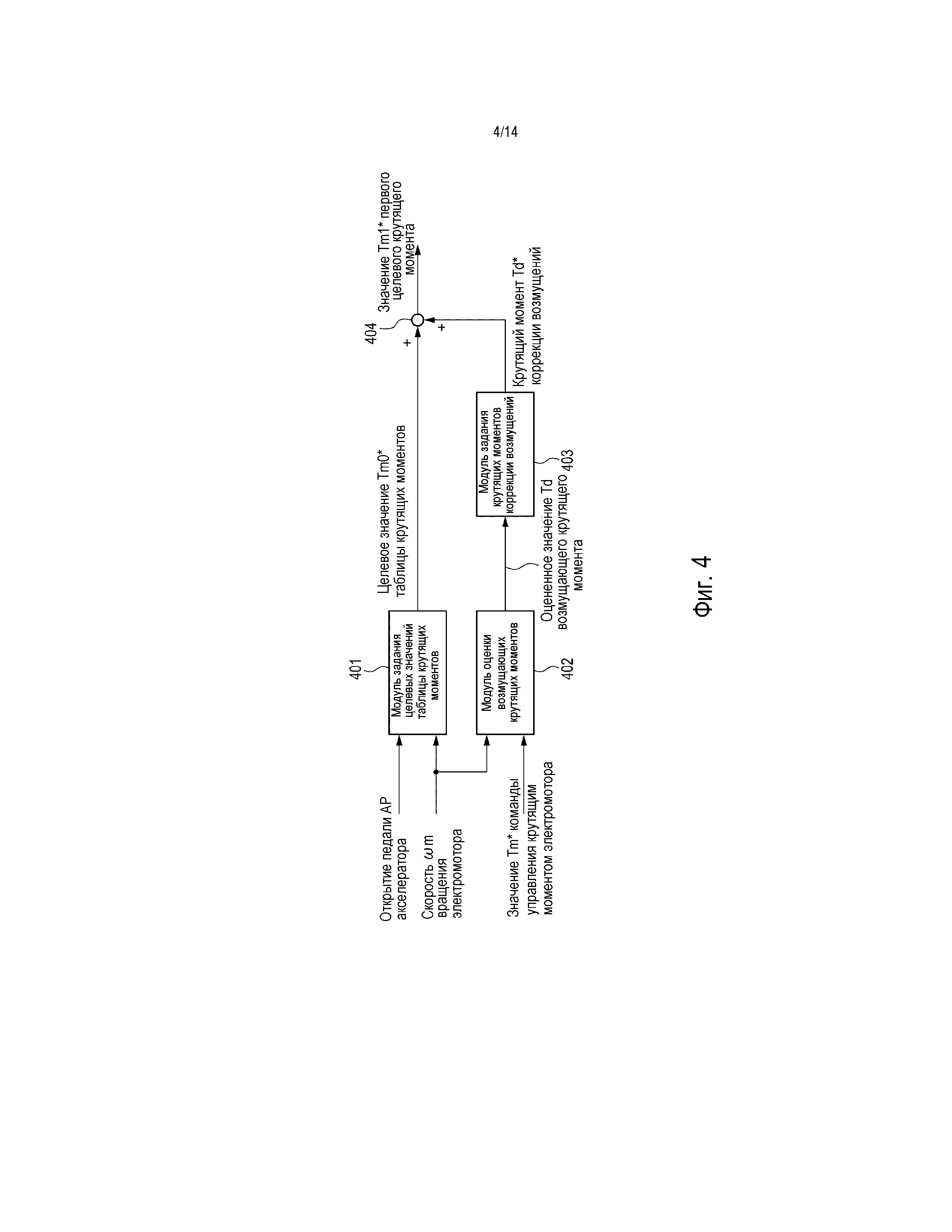
[0026] Ниже подробно описывается процесс, выполняемый на этапе S202 по фиг. 2, т.е. способ для задания значения Tm1* первого целевого крутящего момента с использованием фиг. 4.
[0027] Модуль 401 задания целевых значений таблицы крутящих моментов задает целевое значение Tm0* таблицы крутящих моментов на основе открытия AP педали акселератора и скорости ωm вращения электромотора посредством обращения к таблице крутящих моментов в зависимости от открытия педали акселератора, показанной на фиг. 3.
[0028] Модуль 402 оценки возмущающих крутящих моментов получает оцененное значение Td возмущающего крутящего момента на основе значения Tm* команды управления крутящим моментом электромотора и скорости ωm вращения электромотора.
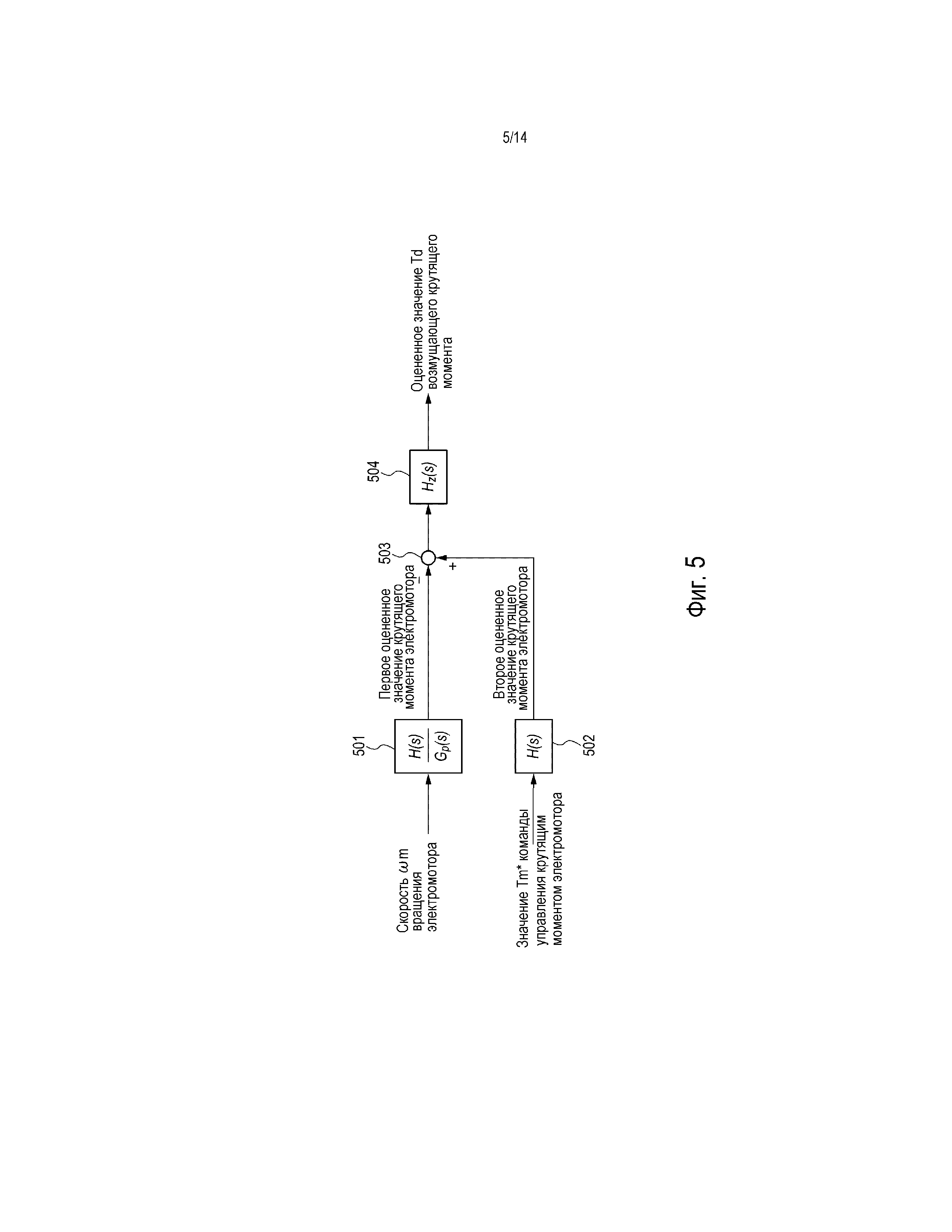
[0029] Фиг. 5 является блок-схемой, показывающей подробную конфигурацию модуля 402 оценки возмущающих крутящих моментов. Модуль 402 оценки возмущающих крутящих моментов включает в себя блок 501 управления, блок 502 управления, модуль 503 вычитания и блок 504 управления.
[0030] Блок 501 управления выступает в качестве фильтра, имеющего характеристику H(s)/Gp(s) передачи, и вычисляет первое оцененное значение крутящего момента электромотора посредством фильтрации скорости ωm вращения электромотора, вводимой в него. Gp(s) является характеристикой передачи от крутящего момента Tm электромотора к скорости ωm вращения электромотора и подробно описывается далее. H(s) является фильтром нижних частот, имеющим такую характеристику передачи, что разность между его степенью знаменателя и степенью числителя не меньше разности между степенью знаменателя и степенью числителя модели Gr(s).
[0031] Блок 502 управления выступает в качестве фильтра нижних частот, имеющего характеристику H(s) передачи, и вычисляет второе оцененное значение крутящего момента электромотора посредством фильтрации значения Tm* команды управления крутящим моментом электромотора, вводимого в него.
[0032] Модуль 503 вычитания вычисляет оцененное значение Td возмущающего крутящего момента посредством вычитания первого оцененного значения крутящего момента электромотора из второго оцененного значения крутящего момента электромотора.
[0033] В настоящем варианте осуществления, оцененное значение Td возмущающего крутящего момента вычисляется посредством фильтрации отклонения между вторым оцененным значением крутящего момента электромотора и первым оцененным значением крутящего момента электромотора посредством блока 504 управления. Блок 504 управления выступает в качестве фильтра, имеющего характеристику Hz(s) передачи, и вычисляет оцененное значение Td возмущающего крутящего момента посредством фильтрации отклонения между вторым оцененным значением крутящего момента электромотора и первым оцененным значением крутящего момента электромотора, вводимыми в него. Далее подробно описывается Hz(s).
[0034] Модуль 403 задания крутящих моментов коррекции возмущений по фиг. 4 получает крутящий момент Td* коррекции возмущений на основе оцененного значения Td возмущающего крутящего момента, вычисленного посредством модуля 402 оценки возмущающих крутящих моментов.
[0035] Фиг. 6 является блок-схемой, показывающей подробную конфигурацию модуля 403 задания крутящих моментов коррекции возмущений. Модуль 403 задания крутящих моментов коррекции возмущений включает в себя модуль 601 вычисления корректирующих крутящих моментов при подъеме, процессор 602 коррекции крутых подъемов, модуль 603 вычисления корректирующих крутящих моментов при спуске, процессор 604 коррекции крутых спусков, модуль 605 определения градиента и процессор 606 задания корректирующего крутящего момента на основе скорости.
[0036] Модуль 601 вычисления корректирующих крутящих моментов при подъеме вычисляет корректирующий крутящий момент Td1 при подъеме посредством умножения оцененного значения Td возмущающего крутящего момента на предварительно определенное корректирующее усиление Kup.
[0037] Процессор 602 коррекции крутых подъемов применяет обработку задания ограничений к корректирующему крутящему моменту Td1 при подъеме на основе значения команды управления крутящим моментом электромотора таблицы крутящих моментов в зависимости от открытия педали акселератора, показанной на фиг. 3, когда "открытие педали акселератора=0/4 (полностью закрыта)", и вычисляет ограничивающий крутящий момент Td2 при подъеме после обработки задания ограничений.
[0038] Модуль 603 вычисления корректирующих крутящих моментов при спуске вычисляет корректирующий крутящий момент Td3 при спуске посредством умножения оцененного значения Td возмущающего крутящего момента на предварительно определенное корректирующее усиление Kdown при спуске.
[0039] Процессор 604 коррекции крутых спусков вычисляет ограничивающий крутящий момент Td4 при спуске для задания замедления транспортного средства постоянным, когда абсолютное значение оцененного значения Td возмущающего крутящего момента не меньше предварительно определенного значения, к примеру, на уклоне крутого спуска. В частности, указывается замедление транспортного средства на уклоне крутого спуска, и требуемый ограничивающий крутящий момент Td4 при спуске вычисляется из значения команды управления крутящим моментом электромотора таблицы крутящих моментов в зависимости от открытия педали акселератора, показанной на фиг. 3, когда "открытие педали акселератора=0/4 (полностью закрыта)", и оцененного значения Td возмущающего крутящего момента.
[0040] Модуль 605 определения градиента определяет градиент поверхности дороги на основе знака оцененного значения Td возмущающего крутящего момента и задает ограничивающий крутящий момент Td2 при подъеме в качестве крутящего момента Td5 коррекции градиента на уклоне подъема (оцененного значения Td возмущающего крутящего момента>0) при задании ограничивающего крутящего момента Td4 при спуске в качестве крутящего момента Td5 коррекции градиента на уклоне спуска (оцененного значения Td возмущающего крутящего момента<0).
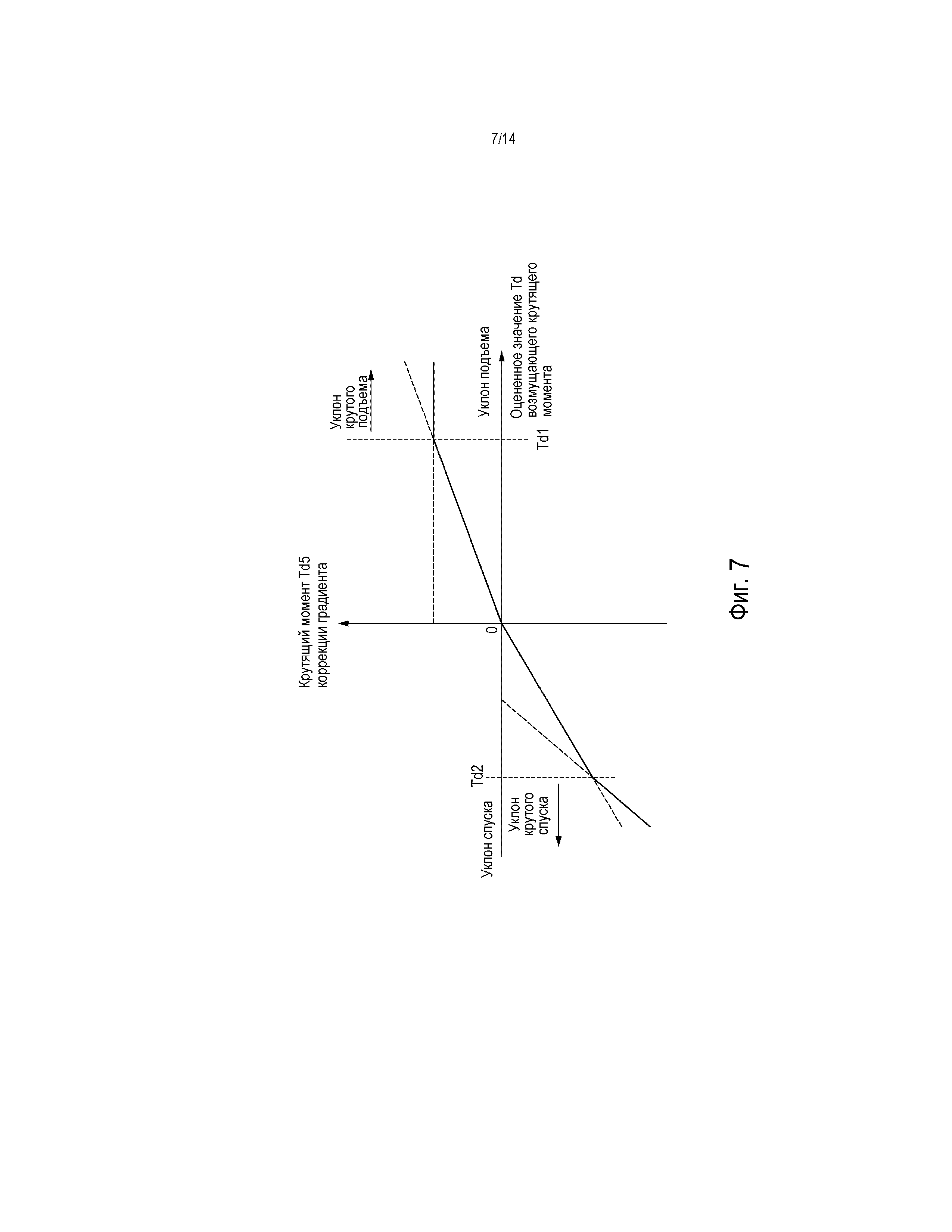
[0041] Следует отметить, что таблица, задающая взаимосвязь оцененного значения Td возмущающего крутящего момента и крутящего момента Td5 коррекции градиента, может быть подготовлена заранее, и крутящий момент Td5 коррекции градиента может вычисляться на основе оцененного значения Td возмущающего крутящего момента посредством обращения к этой таблице.
[0042] Фиг. 7 является графиком, показывающим пример таблицы, задающей взаимосвязь оцененного значения Td возмущающего крутящего момента и крутящего момента Td5 коррекции градиента. В случае поверхности дороги с крутым подъемом, т.е. если оцененное значение Td возмущающего крутящего момента не меньше предварительно определенного значения Td1, крутящий момент Td5 коррекции градиента задается равным предварительно определенному верхнему предельному значению. Дополнительно, в случае дороги, идущей в подъем, которая не представляет собой уклон крутого подъема, т.е. если оцененное значение Td возмущающего крутящего момента превышает 0 и ниже предварительно определенного значения Td1, крутящий момент Td5 коррекции градиента задается равным меньшему значению (тем не менее, Td5>0) по мере того, как оцененное значение Td возмущающего крутящего момента становится меньшим. В случае дороги, идущей под спуск, которая не представляет собой уклон крутого спуска, т.е. если оцененное значение Td возмущающего крутящего момента меньше 0 и больше предварительно определенного значения Td2, крутящий момент коррекции градиента задается равным меньшему значению (тем не менее, Td5<0) по мере того, как оцененное значение Td возмущающего крутящего момента становится меньшим. В случае поверхности дороги с крутым спуском, т.е. если оцененное значение Td возмущающего крутящего момента не превышает предварительно определенное значение Td2, крутящий момент коррекции градиента задается равным меньшему значению (тем не менее, Td5<0) по мере того, как оцененное значение Td возмущающего крутящего момента становится меньшим. Тем не менее, в случае уклона крутого спуска, крутящий момент Td5 коррекции градиента задается равным еще меньшему значению по мере того, как оцененное значение возмущающего крутящего момента становится меньшим, по сравнению с дорогой, идущей под спуск, которая не представляет собой уклон крутого спуска.
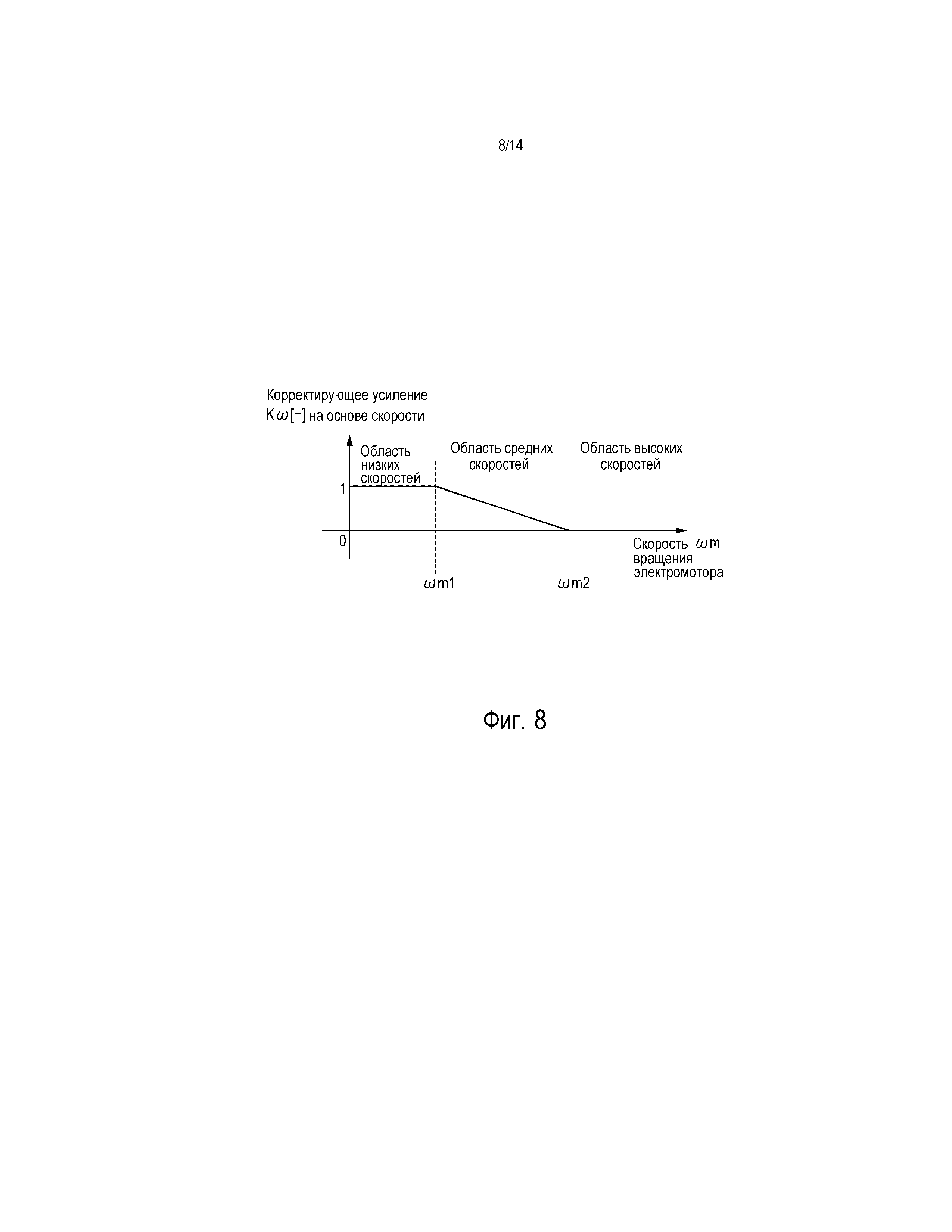
[0043] Процессор 606 задания корректирующего крутящего момента на основе скорости по фиг. 6 получает корректирующее усиление Kω на основе скорости на основе скорости ωm вращения электромотора посредством обращения к таблице, задающей взаимосвязь скорости ωm вращения электромотора и корректирующего усиления Kω на основе скорости, и вычисляет крутящий момент Td* коррекции возмущений посредством умножения крутящего момента Td5 коррекции градиента на корректирующее усиление Kω на основе скорости.
[0044] Фиг. 8 показывает пример таблицы, задающей взаимосвязь скорости ωm вращения электромотора и корректирующего усиления Kω на основе скорости. Корректирующее усиление Kω на основе скорости задается равным 1 в области низких скоростей, в которой скорость ωm вращения электромотора ниже предварительно определенной скорости ωm1 вращения, и задается равным 0 в области высоких скоростей, в которой скорость ωm вращения электромотора не ниже предварительно определенной скорости ωm2 вращения (ω1<ω2). Таким образом, крутящий момент Td5 коррекции градиента выводится в качестве крутящего момента Td* коррекции возмущений в области низких скоростей и задается равным 0 в области высоких скоростей. Дополнительно, в области средних скоростей, в которой скорость ωm вращения электромотора не ниже предварительно определенной скорости ωm1 вращения и ниже предварительно определенной скорости ωm2 вращения, корректирующее усиление на основе скорости задается таким образом, что оно становится меньшим по мере того, как увеличивается скорость ωm вращения электромотора.
[0045] Снова ссылаясь на фиг. 4, описание продолжается. Сумматор 404 вычисляет значение Tm1* первого целевого крутящего момента посредством суммирования целевого значения Tm0* таблицы крутящих моментов, заданного посредством модуля 401 задания целевых значений таблицы крутящих моментов, и крутящего момента Td* коррекции возмущений, заданного посредством модуля 403 задания крутящих моментов коррекции возмущений.
[0046] Поскольку замедление до тех пор, пока не будет оценен момент непосредственно перед остановкой, может регулироваться посредством вычисления значения Tm1* первого целевого крутящего момента посредством вышеуказанного способа, может подавляться уменьшение величины изменения относительно замедления до замедления, когда значение Tm* команды управления крутящим моментом электромотора сходится к оцененному значению Td возмущающего крутящего момента для того, чтобы останавливать транспортное средство, и может улучшаться ощущение при вождении.
[0047] Затем, до того, как описывается процесс управления остановкой, выполняемый на этапе S203, характеристика Gp(s) передачи от крутящего момента Tm электромотора к скорости ωm вращения электромотора описывается в устройстве управления для электромоторного транспортного средства в настоящем варианте осуществления.
[0048] Фиг. 9 является схемой, моделирующей систему трансмиссии для передачи движущей силы транспортного средства, и каждый параметр на фиг. 9 поясняется, как указано ниже.
Jm - инерция электромотора
Jw - инерция ведущих колес
M - вес транспортного средства
Kd - крутильная жесткость приводной системы
Kt - коэффициент, связывающий трение между шинами и поверхностью дороги
N - общее передаточное отношение
r - радиус нагрузки шин
ωm - угловая скорость электромотора
Tm - значение целевого крутящего момента
Td - крутящий момент ведущих колес
F - сила, прикладываемая к транспортному средству
V - скорость транспортного средства
ωw - угловая скорость ведущих колес
[0049] Следующие уравнения движения могут извлекаться из фиг. 9. Тем не менее, звездочка (*), присоединяемая в правом верхнем углу ссылочного обозначения в уравнениях (1)-(3), указывает производную по времени.
уравнение 1
 ...(1)
...(1)
уравнение 2
 ...(2)
...(2)
уравнение 3
 ...(3)
...(3)
уравнение 4
 ...(4)
...(4)
уравнение 5
 ...(5)
...(5)
[0050] Характеристика Gp(s) передачи от значения Tm целевого крутящего момента к скорости ωm вращения электромотора для электромотора 4, полученная на основе уравнений движения (1)-(5), выражается посредством следующего уравнения (6).
уравнение 6
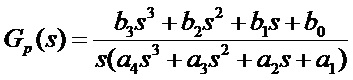 ...(6)
...(6)
[0051] Здесь, каждый параметр в уравнении (6) выражается посредством следующих уравнений (7).
уравнение 7
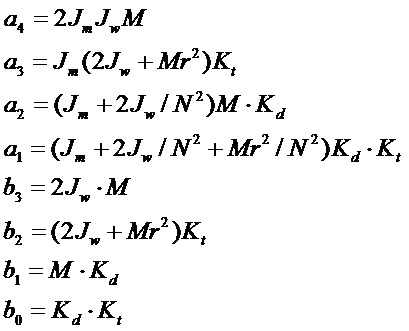 ...(7)
...(7)
[0052] Полюса и нулевая точка функции передачи, показанной в уравнении (6), могут быть аппроксимированы в функцию передачи следующего уравнения (8), и один полюс и одна нулевая точка указывают значения, чрезвычайно близкие друг к другу. Это является эквивалентным тому, что α и β следующего уравнения (8) указывают значения, чрезвычайно близкие друг к другу.
уравнение 8
 ...(8)
...(8)
[0053] Соответственно, посредством выполнения отмены нулей и полюсов (аппроксимации для α=β) в уравнении (8), Gp(s) составляет характеристику передачи (второй порядок)/(третий порядок), как показано в следующем уравнении (9).
уравнение 9
 ...(9)
...(9)
[0054] После этого описываются подробности процесса управления остановкой, выполняемого на этапе S203 по фиг. 2. Фиг. 10 является блок-схемой для реализации процесса управления остановкой.
[0055] Модуль 1001 задания крутящего момента обратной связи на основе скорости вращения электромотора вычисляет крутящий момент Tω обратной связи на основе скорости вращения электромотора (в дальнейшем в этом документе, называемый "крутящим моментом обратной связи на основе скорости вращения электромотора") на основе определенной скорости ωm вращения электромотора.
[0056] Фиг. 11 является схемой, показывающей способ для вычисления крутящего момента Tω обратной связи на основе скорости вращения электромотора на основе определенной скорости ωm вращения электромотора. Модуль 1001 задания крутящего момента обратной связи на основе скорости вращения электромотора включает в себя умножитель 1101 и вычисляет крутящий момент Tω обратной связи на основе скорости вращения электромотора посредством умножения скорости ωm вращения электромотора на усиление Kvref. Тем не менее, Kvref является отрицательным значением (со знаком "минус"), необходимым для того, чтобы останавливать электромоторное транспортное средство непосредственно перед тем, как электромоторное транспортное средство останавливается, и надлежащим образом задается, например, из экспериментальных данных и т.п. Крутящий момент Tω обратной связи на основе скорости вращения электромотора задается в качестве крутящего момента, допускающего достижение большей рекуперативной тормозной силы по мере того, как увеличивается скорость ωm вращения электромотора.
[0057] Следует отметить, что хотя модуль 1001 задания крутящего момента обратной связи на основе скорости вращения электромотора описывается для вычисления крутящего момента Tω обратной связи на основе скорости вращения электромотора посредством умножения скорости ωm вращения электромотора на усиление Kvref, крутящий момент Tω обратной связи на основе скорости вращения электромотора может вычисляться с использованием таблицы рекуперативных крутящих моментов, задающей рекуперативный крутящий момент относительно скорости ωm вращения электромотора, таблицы темпов спада, сохраняющей темп спада скорости ωm вращения электромотора заранее, и т.п.
[0058] Снова ссылаясь на фиг. 10, описание продолжается. Модуль 1002 оценки возмущающих крутящих моментов вычисляет оцененное значение Td возмущающего крутящего момента на основе определенной скорости ωm вращения электромотора и значения Tm* команды управления крутящим моментом электромотора. Конфигурация модуля 1002 оценки возмущающих крутящих моментов является идентичной конфигурации модуля 402 оценки возмущающих крутящих моментов по фиг. 4, т.е. конфигурации, показанной на фиг. 5.
[0059] Здесь описывается характеристика Hz(s) передачи блока 504 управления по фиг. 5. Следующее уравнение (10) получается посредством перезаписи уравнения (9). ζz, ωz, ζp и ωp в уравнении (10) выражаются посредством уравнений (11).
уравнение 10
 ...(10)
...(10)
уравнение 11
 ...(11)
...(11)
[0060] Из вышеозначенного, Hz(s) выражается посредством следующего уравнения (12). Тем не менее, ζc>ζz. Дополнительно, ζc>1, чтобы улучшать эффект подавления вибрации в окружении при замедлении, связанный с люфтом передачи.
уравнение 12
 ...(12)
...(12)
[0061] Следует отметить, что хотя возмущающий крутящий момент оценивается посредством модуля наблюдения возмущений, как показано на фиг. 5, в настоящем варианте осуществления он может оцениваться с использованием счетчика, такого как датчик продольной составляющей G транспортного средства.
[0062] Здесь, сопротивление воздуха, погрешность моделирования, вызываемая посредством варьирования массы транспортного средства вследствие числа пассажиров и допустимой нагрузки, сопротивление крену шин, сопротивление вследствие градиента поверхности дороги и т.п. могут считаться возмущениями, но фактор возмущений, доминирующий непосредственно перед тем, как транспортное средство останавливается, представляет собой сопротивление вследствие градиента. Факторы возмущений отличаются в зависимости от условий вождения, но факторы возмущений, описанные выше, могут быть совместно оценены, поскольку модуль 402 оценки возмущающих крутящих моментов и модуль 1002 оценки возмущающих крутящих моментов вычисляют оцененное значение Td возмущающего крутящего момента на основе значения Tm* команды управления крутящим моментом электромотора, скорости ωm вращения электромотора и модели Gp(s) транспортного средства. Это обеспечивает реализацию плавной остановки транспортного средства после замедления при любом состоянии движения.
[0063] Снова ссылаясь на фиг. 10, описание продолжается. Сумматор 1003 вычисляет значение Tm2* второго целевого крутящего момента посредством суммирования крутящего момента Tω обратной связи на основе скорости вращения электромотора, вычисленного посредством модуля 1001 задания крутящего момента обратной связи на основе скорости вращения электромотора, и оцененного значения Td возмущающего крутящего момента, вычисленного посредством модуля 1002 оценки возмущающих крутящих моментов.
[0064] Модуль 1004 сравнения крутящих моментов сравнивает абсолютные величины значений Tm1*, Tm2* первого и второго целевого крутящего момента и задает большее значение целевого крутящего момента в качестве значения Tm* команды управления крутящим моментом электромотора. Значение Tm2* второго целевого крутящего момента меньше значения Tm1* первого целевого крутящего момента во время движения транспортного средства. Когда транспортное средство замедляется и достигает момента непосредственно перед остановкой (скорость транспортного средства не выше предварительно определенной скорости транспортного средства), значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента. Таким образом, если значение Tm1* первого целевого крутящего момента превышает значение Tm2* второго целевого крутящего момента, модуль 1004 сравнения крутящих моментов оценивает то, что момент непосредственно перед остановкой не достигнут, и задает значение Tm* команды управления крутящим моментом электромотора равным значению Tm1* первого целевого крутящего момента. Дополнительно, когда значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента, модуль 1004 сравнения крутящих моментов оценивает то, что транспортное средство должно остановиться в ближайшее время, и переключает значение Tm* команды управления крутящим моментом электромотора со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента. Следует отметить, что значение Tm2* второго целевого крутящего момента является положительным крутящим моментом на дороге, идущей в подъем, и отрицательным крутящим моментом на дороге, идущей под спуск, и сходится практически к нулю на ровной дороге, чтобы поддерживать состояние остановки транспортного средства.
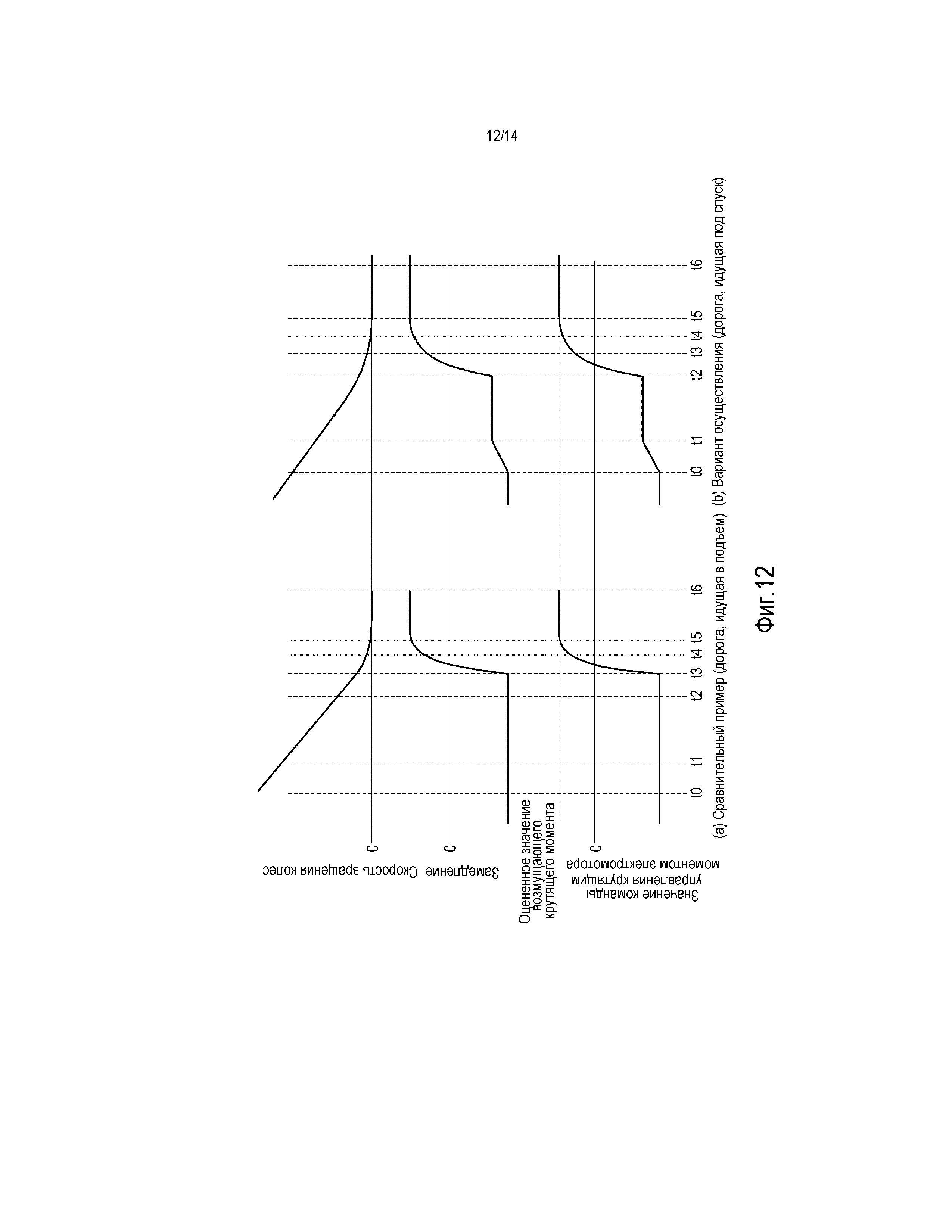
[0065] Фиг. 12 является диаграммой, показывающей результаты управления для управления остановкой для остановки электромоторного транспортного средства на дороге, идущей в подъем. Фиг. 12(a) показывает результат управления сравнительного примера конфигурации, в которой целевое значение Tm0* таблицы крутящих моментов не корректируется при вычислении значения Tm1* первого целевого крутящего момента (модуль 402 оценки возмущающих крутящих моментов и модуль 403 задания крутящих моментов коррекции возмущений по фиг. 4 отсутствуют), а фиг. 12(b) показывает результат управления посредством устройства управления для электромоторного транспортного средства в настоящем варианте осуществления, при этом скорость вращения колес, замедление и значение команды управления крутящим моментом электромотора последовательно показаны сверху.
[0066] На фиг. 12(a), транспортное средство замедляется на основе целевого значения Tm0* таблицы крутящих моментов, вычисленного на основе открытия педали акселератора и скорости вращения электромотора вплоть до времени t3.
[0067] Во время t3 оценивается то, что транспортное средство остановится в ближайшее время вследствие уменьшения скорости ωm вращения электромотора до предварительно определенной скорости вращения независимо от градиента поверхности дороги, и значение Tm* команды управления крутящим моментом электромотора переключается со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента. Таким образом, значение Tm* команды управления крутящим моментом электромотора внезапно изменяется таким образом, что оно совпадает с оцененным значением Td возмущающего крутящего момента во время t3-t5. Вследствие внезапного изменения значения Tm* команды управления крутящим моментом электромотора, водитель ощущает толчок вследствие разности уровней крутящего момента и внезапного изменения крутящего момента во время переключения значения команды управления крутящим моментом электромотора. В частности, поскольку значение команды управления крутящим моментом электромотора переключается на идентичной скорости вращения (скорости транспортного средства) независимо от градиента поверхности дороги, изменение значения команды управления крутящим моментом электромотора является большим на дороге, идущей в подъем, и водитель с большой вероятностью должен ощущать толчок вследствие внезапного изменения крутящего момента.
[0068] После времени t5 скорость вращения колес становится равной 0, и состояние остановки транспортного средства поддерживается.
[0069] На фиг. 12(b), участок вплоть до времени t0 является областью высоких скоростей по фиг. 8, и крутящий момент Td* коррекции возмущений, вычисленный посредством модуля 403 задания крутящих моментов коррекции возмущений, равен 0. Таким образом, вплоть до времени t0, транспортное средство замедляется на основе целевого значения Tm0* таблицы крутящих моментов, выводимого из модуля 401 задания целевых значений таблицы крутящих моментов.
[0070] Участок от времени t0 до времени t1 является областью средних скоростей по фиг. 8. На этом участке, крутящий момент Td* коррекции возмущений вычисляется посредством умножения крутящего момента Td5 коррекции градиента, полученного на основе оцененного значения Td возмущающего крутящего момента, на корректирующее усиление Kω на основе скорости, соответствующее скорости ωm вращения электромотора (процессор 606 задания корректирующего крутящего момента на основе скорости по фиг. 6), и значение Tm1* первого целевого крутящего момента вычисляется посредством суммирования целевого значения Tm0* таблицы крутящих моментов, выводимого из модуля 401 задания целевых значений таблицы крутящих моментов, и крутящего момента Td* коррекции возмущений. Затем транспортное средство замедляется на основе вычисленного значения Tm1* первого целевого крутящего момента.
[0071] Участок после t1 является областью низких скоростей по фиг. 8. На этом участке, крутящий момент Td* коррекции возмущений, вычисленный посредством модуля 403 задания крутящих моментов коррекции возмущений по фиг. 4, равен оцененному значению Td возмущающего крутящего момента, полученному посредством модуля 402 оценки возмущающих крутящих моментов, и значение Tm1* первого целевого крутящего момента вычисляется посредством суммирования целевого значения Tm0* таблицы крутящих моментов, выводимого из модуля 401 задания целевых значений таблицы крутящих моментов, и крутящего момента Td* коррекции возмущений. Затем транспортное средство замедляется на основе вычисленного значения Tm1* первого целевого крутящего момента.
[0072] Во время t2 значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента, оценивается то, что транспортное средство должно остановиться в ближайшее время, и значение Tm* команды управления крутящим моментом электромотора переключается со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента. Это время переключения отличается в зависимости от градиента поверхности дороги. Таким образом, значение Tm* команды управления крутящим моментом электромотора плавно изменяется таким образом, что оно сходится к оцененному значению Td возмущающего крутящего момента во время t2-t5.
[0073] Во время t5 значение Tm* команды управления крутящим моментом электромотора асимптотически сходится к оцененному значению Td возмущающего крутящего момента, и скорость ωm вращения электромотора асимптотически сходится к нулю. Таким образом, возможна плавная остановка транспортного средства без вибраций при ускорении. После времени t5 состояние остановки транспортного средства поддерживается.
[0074] В частности, согласно устройству управления для электромоторного транспортного средства в настоящем варианте осуществления, крутящий момент Td* коррекции возмущений вычисляется на основе оцененного значения возмущающего крутящего момента, остановится ли или нет транспортное средство в ближайшее время, оценивается также с учетом вычисленного крутящего момента Td* коррекции возмущений, и значение Tm* команды управления крутящим моментом электромотора переключается со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента. Таким образом, плавное замедление и остановка транспортного средства, эквивалентные плавному замедлению и остановке на ровных дорогах, также могут быть реализованы на дорогах, идущих в подъем.
[0075] Фиг. 13 является диаграммой, показывающей результаты управления для управления остановкой для остановки электромоторного транспортного средства на дороге, идущей под спуск. Фиг. 13(a) показывает результат управления сравнительного примера конфигурации, в которой целевое значение Tm0* таблицы крутящих моментов не корректируется при вычислении значения Tm1* первого целевого крутящего момента (модуль 402 оценки возмущающих крутящих моментов и модуль 403 задания крутящих моментов коррекции возмущений по фиг. 4 отсутствуют), а фиг. 13(b) показывает результат управления посредством устройства управления для электромоторного транспортного средства в настоящем варианте осуществления, при этом скорость вращения колес, замедление и значение команды управления крутящим моментом электромотора последовательно показаны сверху.
[0076] На фиг. 13(a), транспортное средство замедляется на основе целевого значения Tm0* таблицы крутящих моментов, вычисленного на основе открытия педали акселератора и скорости вращения электромотора вплоть до времени t3.
[0077] Во время t3 оценивается то, что транспортное средство остановится в ближайшее время вследствие уменьшения скорости ωm вращения электромотора до предварительно определенной скорости вращения независимо от градиента поверхности дороги, и значение Tm* команды управления крутящим моментом электромотора переключается со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента. Таким образом, во время t3-t6, время до тех пор, пока транспортное средство не остановится, и расстояние до остановки становятся большими, и ощущение при вождении ухудшается вследствие медленного изменения крутящего момента, в силу чего нарушается плавная остановка транспортного средства. В частности, в конфигурации сравнительного примера, в которой значение команды управления крутящим моментом электромотора переключается на идентичной скорости вращения (скорости транспортного средства) независимо от градиента поверхности дороги, время до тех пор, пока значение Tm* команды управления крутящим моментом электромотора не сойдется к оцененному значению Td возмущающего крутящего момента, становится большим, и ощущение при вождении ухудшается на дорогах, идущих под спуск.
[0078] После времени t6 скорость вращения колес становится равной 0, и состояние остановки транспортного средства поддерживается.
[0079] На фиг. 13(b), участок вплоть до времени t0 является областью высоких скоростей по фиг. 8, и крутящий момент Td* коррекции возмущений, вычисленный посредством модуля 403 задания крутящих моментов коррекции возмущений, равен 0. Таким образом, вплоть до времени t0, транспортное средство замедляется на основе целевого значения Tm0* таблицы крутящих моментов, выводимого из модуля 401 задания целевых значений таблицы крутящих моментов.
[0080] Участок от времени t0 до времени t1 является областью средних скоростей по фиг. 8. На этом участке, крутящий момент Td* коррекции возмущений вычисляется посредством умножения крутящего момента Td5 коррекции градиента, полученного на основе оцененного значения Td возмущающего крутящего момента, на корректирующее усиление Kω на основе скорости, соответствующее скорости ωm вращения электромотора (процессор 606 задания корректирующего крутящего момента на основе скорости по фиг. 6), и значение Tm1* первого целевого крутящего момента вычисляется посредством суммирования целевого значения Tm0* таблицы крутящих моментов, выводимого из модуля 401 задания целевых значений таблицы крутящих моментов, и крутящего момента Td* коррекции возмущений. Затем транспортное средство замедляется на основе вычисленного значения Tm1* первого целевого крутящего момента.
[0081] Участок после t1 является областью низких скоростей по фиг. 8. На этом участке, крутящий момент Td* коррекции возмущений, вычисленный посредством модуля 403 задания крутящих моментов коррекции возмущений по фиг. 4, равен оцененному значению Td возмущающего крутящего момента, полученному посредством модуля 402 оценки возмущающих крутящих моментов, и значение Tm1* первого целевого крутящего момента вычисляется посредством суммирования целевого значения Tm0* таблицы крутящих моментов, выводимого из модуля 401 задания целевых значений таблицы крутящих моментов, и крутящего момента Td* коррекции возмущений. Затем транспортное средство замедляется на основе вычисленного значения Tm1* первого целевого крутящего момента.
[0082] Во время t4 значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента, оценивается то, что транспортное средство должно остановиться в ближайшее время, и значение Tm* команды управления крутящим моментом электромотора переключается со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента. Это время переключения отличается в зависимости от градиента поверхности дороги.
[0083] Во время t5 значение Tm* команды управления крутящим моментом электромотора асимптотически сходится к оцененному значению Td возмущающего крутящего момента, и скорость ωm вращения электромотора асимптотически сходится к нулю. Таким образом, возможна плавная остановка транспортного средства без вибраций при ускорении. После времени t5 состояние остановки транспортного средства поддерживается.
[0084] В частности, согласно устройству управления для электромоторного транспортного средства в настоящем варианте осуществления, крутящий момент Td* коррекции возмущений вычисляется на основе оцененного значения возмущающего крутящего момента, и остановится ли или нет транспортное средство в ближайшее время (время переключения значения Tm* команды управления крутящим моментом электромотора со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента определяется), оценивается также с учетом вычисленного крутящего момента Td* коррекции возмущений. Таким образом, плавное замедление и остановка транспортного средства, эквивалентные плавному замедлению и остановке на ровных дорогах, также могут быть реализованы на дорогах, идущих под спуск.
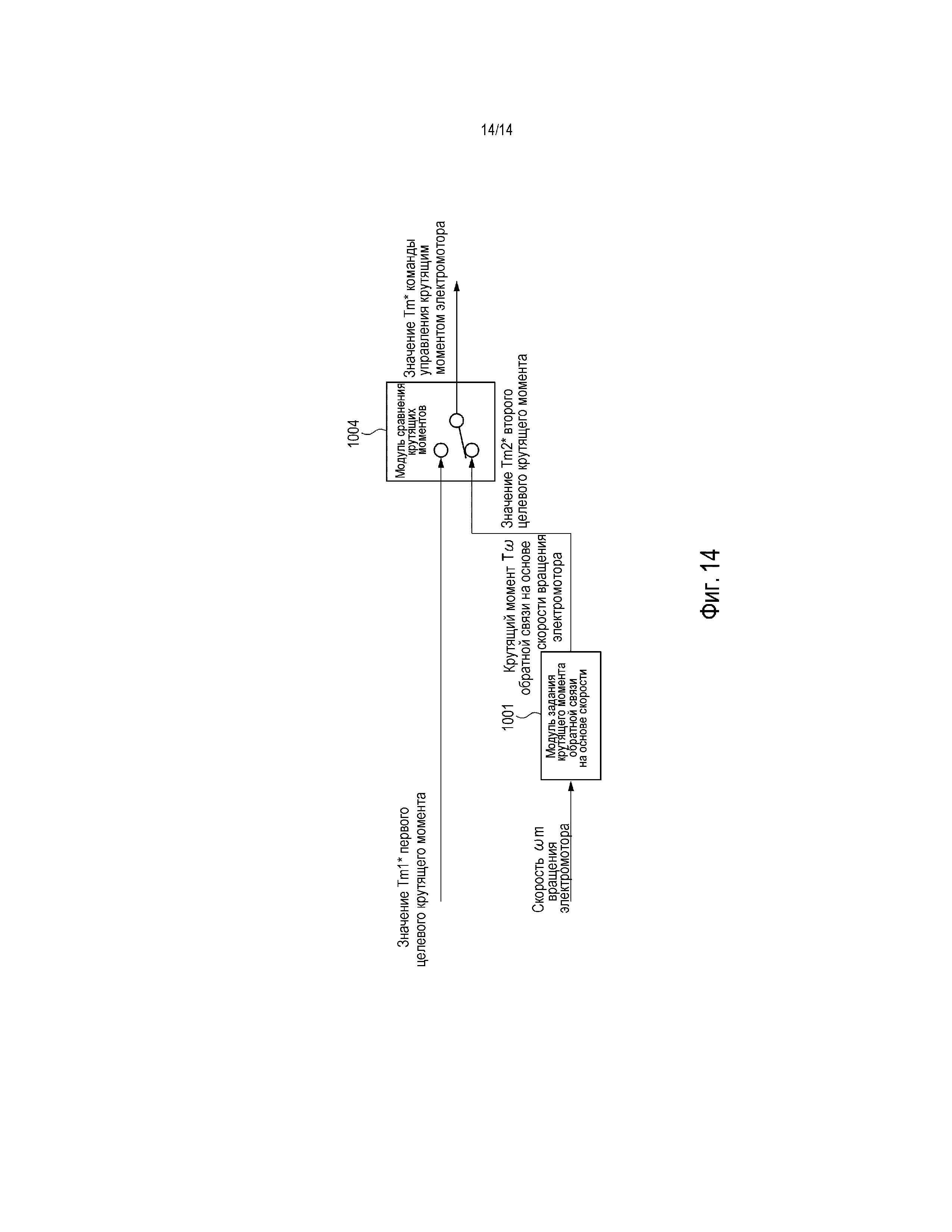
[0085] Здесь, хотя значение Tm2* второго целевого крутящего момента вычисляется посредством суммирования крутящего момента Tω обратной связи на основе скорости вращения электромотора и оцененного значения Td возмущающего крутящего момента в вышеприведенном описании, крутящий момент Tω обратной связи на основе скорости вращения электромотора может задаваться в качестве значения Tm2* второго целевого крутящего момента. Фиг. 14 является блок-схемой для реализации процесса управления остановкой в случае задания крутящего момента Tω обратной связи на основе скорости вращения электромотора в качестве значения Tm2* второго целевого крутящего момента. На фиг. 14, составляющие элементы, идентичные составляющим элементам, показанным на фиг. 10, обозначаются посредством идентичных ссылок с номерами. В этом случае, оцененное значение Td возмущающего крутящего момента вычисляется как нулевое при вычислении значения Tm1* первого целевого крутящего момента (фиг. 4).
[0086] Также в случае задания крутящего момента Tω обратной связи на основе скорости вращения электромотора в качестве значения Tm2* второго целевого крутящего момента, значение Tm* команды управления крутящим моментом электромотора переключается со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента, когда значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента, и оценивается то, что транспортное средство должно остановиться в ближайшее время. В это время, значение Tm* команды управления крутящим моментом электромотора сходится к нулю по мере того, как уменьшается скорость ωm вращения электромотора, поскольку значение Tm2* второго целевого крутящего момента практически равно крутящему моменту Tω обратной связи на основе скорости вращения электромотора.
[0087] Как описано выше, устройство управления для электромоторного транспортного средства в одном варианте осуществления представляет собой устройство управления для электромоторного транспортного средства, использующего электромотор 4 в качестве источника приведения в движение, и выполнено с возможностью замедляться посредством рекуперативной тормозной силы электромотора 4 и вычисляет значение Tm1* первого целевого крутящего момента на основе информации транспортного средства и вычисляет значение Tm2* второго целевого крутящего момента, которое сходится к нулю по мере того, как уменьшается скорость ωm вращения электромотора. Значение Tm1* первого целевого крутящего момента задается в качестве значения Tm* команды управления крутящим моментом электромотора, когда определяется то, что транспортное средство не достигает момента непосредственно перед остановкой, и значение Tm2* второго целевого крутящего момента задается в качестве значения Tm* команды управления крутящим моментом электромотора, когда определяется то, что транспортное средство должно остановиться в ближайшее время. Электромотор 4 управляется на основе заданного значения Tm* команды управления крутящим моментом электромотора. В частности, поскольку значение Tm* команды управления крутящим моментом электромотора переключается со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента непосредственно перед тем, как транспортное средство остановится после того, как транспортное средство замедляется на основе значения Tm1* первого целевого крутящего момента, на основе информации транспортного средства, может быть реализована плавная остановка транспортного средства после замедления. Это обеспечивает реализацию плавного замедления и остановки транспортного средства без вибраций при ускорении в продольном направлении на ровных дорогах. Дополнительно, поскольку транспортное средство может замедляться до состояния остановки транспортного средства даже без использования тормозной силы посредством средства механического торможения, такого как ножной тормоз, работа в рекуперативном режиме электромотора 4 возможна также непосредственно перед тем, как транспортное средство остановится, и может улучшаться потребление электроэнергии. Кроме того, поскольку ускорение/замедление и остановка транспортного средства могут быть реализованы только посредством операции нажатия педали акселератора, необязательно нажимать с переключением педаль акселератора и педаль тормоза, и может уменьшаться нагрузка на водителя.
[0088] В случае остановки транспортного средства с использованием педали тормоза, водитель, непривыкший к вождению, слишком сильно нажимает педаль акселератора, так что формируются вибрации при ускорении в продольном направлении транспортного средства, когда транспортное средство останавливается. Дополнительно, если предпринимается попытка реализовывать замедление и остановку транспортного средства при постоянном замедлении в транспортном средстве для реализации ускорения/замедления и остановки транспортного средства только посредством операции нажатия педали акселератора, замедление должно увеличиваться, чтобы реализовывать достаточное замедление в ходе замедления. Таким образом, вибрации при ускорении формируются в продольном направлении транспортного средства, когда транспортное средство останавливается. Тем не менее, согласно устройству управления для электромоторного транспортного средства в одном варианте осуществления, любой водитель может реализовывать плавное замедление и остановку транспортного средства только посредством операции нажатия педали акселератора, как описано выше.
[0089] Дополнительно, согласно устройству управления для электромоторного транспортного средства в одном варианте осуществления, определяется то, что транспортное средство не достигает момента непосредственно перед остановкой, если значение Tm1* первого целевого крутящего момента превышает значение Tm2* второго целевого крутящего момента, при определении остановки в ближайшее время, если значение Tm2* второго целевого крутящего момента превышает значение Tm1* первого целевого крутящего момента. Таким образом, значение Tm* команды управления крутящим моментом электромотора может переключаться со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента без формирования разности уровней крутящего момента непосредственно перед тем, как транспортное средство остановится. Дополнительно, поскольку большее из значений Tm1*, Tm2* первого и второго целевого крутящего момента задается в качестве значения Tm* команды управления крутящим моментом электромотора, плавное замедление может быть реализовано без формирования разности уровней крутящего момента во время переключения значения целевого крутящего момента при любом градиенте.
[0090] В частности, согласно устройству управления для электромоторного транспортного средства в одном варианте осуществления, получается оцененное значение Td возмущающего крутящего момента, и значение целевого крутящего момента, которое сходится к оцененному значению Td возмущающего крутящего момента, по мере того, как уменьшается скорость ωm вращения электромотора, вычисляется как значение Tm2* второго целевого крутящего момента. Таким образом, независимо от того, является она дорогой, идущей в подъем, дорогой, идущей под спуск, или ровной дорогой, плавное замедление без вибраций при ускорении в продольном направлении может быть реализовано непосредственно перед тем, как транспортное средство остановится, и состояние остановки транспортного средства может поддерживаться.
[0091] Поскольку оцененное значение Td возмущающего крутящего момента оценивается как положительное значение на дороге, идущей в подъем, и отрицательное значение на дороге, идущей под спуск, транспортное средство также может плавно останавливаться на уклонах, и состояние остановки транспортного средства может поддерживаться без необходимости ножного тормоза. Дополнительно, поскольку оцененное значение Td возмущающего крутящего момента оценивается как нулевое на ровной дороге, транспортное средство может плавно останавливаться, и состояние остановки транспортного средства может поддерживаться без необходимости ножного тормоза также на ровных дорогах.
[0092] Дополнительно, поскольку значение Tm1* первого целевого крутящего момента вычисляется посредством вычисления целевого значения Tm0* таблицы крутящих моментов на основе информации транспортного средства и коррекции вычисленного целевого значения Tm0* таблицы крутящих моментов на основе оцененного значения Td возмущающего крутящего момента, замедление до момента непосредственно перед остановкой определяется и может регулироваться на основе оцененного значения Td возмущающего крутящего момента. Таким образом, может подавляться величина изменения крутящего момента со значения Tm* команды управления крутящим моментом электромотора до момента непосредственно перед остановкой на оцененное значение Td возмущающего крутящего момента, к которому сходится значение Tm* команды управления крутящим моментом электромотора при остановке транспортного средства, и может улучшаться ощущение при вождении посредством подавления толчка вследствие изменения крутящего момента.
[0093] В частности, поскольку крутящий момент Td* коррекции возмущений вычисляется посредством умножения оцененного значения Td возмущающего крутящего момента на предварительно определенное усиление (Kup, Kdown), и значение Tm1* первого целевого крутящего момента вычисляется посредством суммирования целевого значения Tm0* таблицы крутящих моментов и крутящего момента Td* коррекции возмущений, значение Tm1* первого целевого крутящего момента может вычисляться посредством линейной коррекции целевого значения Tm0* таблицы крутящих моментов в соответствии с возмущениями.
[0094] Дополнительно, крутящий момент Td* коррекции возмущений вычисляется посредством умножения произведения оцененного значения Td возмущающего крутящего момента и предварительно определенного усиления (Kup, Kdown) на корректирующее усиление Kω на основе скорости, соответствующее скорости ωm вращения электромотора, и корректирующее усиление Kω на основе скорости равно 1, если скорость ωm вращения электромотора ниже первой предварительно определенной скорости ωm1 вращения, равно 0, если скорость ωm вращения электромотора выше второй предварительно определенной скорости ωm2 вращения, превышающей первую предварительно определенную скорость ωm1 вращения, и равно значению, не меньшему 0 и не большему 1 и ближе к 0 по мере того, как увеличивается скорость ωm вращения электромотора, если скорость ωm вращения электромотора не ниже первой предварительно определенной скорости ωm1 вращения и не выше второй предварительно определенной скорости ωm2 вращения. Возмущающий крутящий момент в области высоких скоростей в основном обусловлен сопротивлением воздуха. Ощущение ускорения/замедления в области высоких скоростей может согласовываться с ощущением при вождении посредством уменьшения крутящего момента Td* коррекции возмущений по мере того, как увеличивается скорость ωm вращения электромотора.
[0095] Настоящее изобретение не ограничено вышеописанным одним вариантом осуществления. Например, в вышеприведенном описании, значение Tm2* второго целевого крутящего момента является значением целевого крутящего момента, которое сходится к оцененному значению Td возмущающего крутящего момента с уменьшением скорости ωm вращения электромотора. Тем не менее, поскольку параметры скорости, такие как скорость вращения колес, скорость кузова транспортного средства и скорость вращения ведущего вала, имеют пропорциональную взаимосвязь с скоростью вращения электромотора 4, значение Tm2* второго целевого крутящего момента может принудительно сходиться к оцененному значению Td возмущающего крутящего момента (или нулю) с уменьшением параметра скорости, пропорционального скорости вращения электромотора 4.
[0096] Хотя выше описан вариант осуществления настоящего изобретения, вышеописанный вариант осуществления является только одним примером варианта применения настоящего изобретения и не имеет намерение ограничивать объем настоящего изобретения конкретной конфигурацией вышеописанного варианта осуществления.
[0097] Данная заявка притязает на приоритет на основе заявки на патент (Япония) 2014-003179, поданной 10 января 2014 года в Патентное бюро (Япония), содержимое которой полностью содержится в данном документе по ссылке.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство управления для электромоторного транспортного средства и способ управления для электромоторного транспортного средства
Устройство управления для электромоторного транспортного средства и способ управления для электромоторного транспортного средства
Устройство управления приводом электрического транспортного средства и способ управления приводом электрического транспортного средства
Способ управления для электрического транспортного средства и устройство управления для электрического транспортного средства
Антитело к notch4 человека

