Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНТЕНСИВНОСТИ ДВИЖЕНИЯ С ПОМОЩЬЮ ЭЛЕКТРОННОГО КОНТРОЛЛЕРА, УСТАНОВЛЕННОГО В ТРАНСПОРТНОМ СРЕДСТВЕ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к мониторингу дорожного движения вокруг транспортного средства и, в частности, к способу и устройству определения интенсивности движения в режиме реального времени из салона движущегося оборудованного транспортного средства.
Уровень техники
С учетом разнообразия автомобильных систем и функций целесообразно было бы иметь измеритель интенсивности дорожного движения (в том числе оценивающий плотность движения впереди транспортного средства, на смежных полосах движения и совокупную или общую интенсивность дорожного движения рядом с транспортным средством). Например, могут быть установлены пороговые значения выдачи предупреждений (например, расстояния или безопасные зоны) для системы предупреждения о столкновении в зависимости от низкой, средней или высокой интенсивности движения. Кроме того, в системе контроля внимательности водителя могут быть использованы различные пороговые значения, соответствующие интенсивности движения.
Традиционно интенсивность движения оценивают различными способами. Один из автоматизированных способов представляет собой приблизительную оценку интенсивности движения путем отслеживания мобильных телефонов на определенных участках пути (например, в центральную систему контроля поступают координаты отдельных телефонов, определенные с помощью глобальной системы позиционирования (GPS) или вышек сотовой связи, после чего их наносят на отрезки дороги, вычисляют интенсивность движения и сообщают результат водителям). Может быть использован и другой автоматизированный способ подсчета транспортных средств, находящихся на отрезке дороги. Указанные подходы дают лишь общее представление о количестве транспортных средств, находящихся на конкретном участке (то есть не конкретную информацию об участке вокруг определенного транспортного средства). Известные способы имеют и другие недостатки, в том числе низкую скорость обновления, необходимость наличия беспроводной связи в транспортном средстве для получения информации, а также необходимость создания инфраструктуры для выполнения вычислений за пределами транспортного средства.
При другом способе водители или пассажиры могут визуально рассчитать интенсивность движения на участке дороги. Настоящий способ имеет те же недостатки и может быть менее точным. В другом способе для характеристики интенсивности движения может быть использована система «транспортное средство - инфраструктура». Данный подход связан с высокими затратами на установку аппаратного оборудования как в транспортном средстве, так и на придорожной полосе. Также для того. чтобы данный способ стал практически осуществимым, необходимо глубокое проникновение на рынок.
Раскрытие изобретения
По варианту изобретения предлагается способ определения интенсивности движения при помощи электронного контроллера, установленного в транспортном средстве. Датчик дистанционно обнаруживает объекты, находящиеся в зоне мониторинга вокруг оборудованного транспортного средства. Среди обнаруженных объектов определяют положение соседних транспортных средств. Прогнозируют траекторию движения оборудованного транспортного средства. Электронный контроллер группирует соседние транспортные средства в полосы движения, в том числе полосу движения оборудованного транспортного средства и одну или более соседних полос движения, примыкающих к прогнозируемой траектории. Электронный контроллер определяет дистанцию на полосе движения оборудованного транспортного средства в зависимости от положения самого дальнего транспортного средства на полосе движения оборудованного транспортного средства, и затем определяет дистанцию на смежных полосах движения в зависимости от разницы между самым близким транспортным средством на смежной полосе движения, находящимся в зоне мониторинга, и самым дальним транспортным средством на смежной полосе движения. Электронный контроллер отображает интенсивность движения в зависимости от соотношения числа сгруппированных транспортных средств и суммы дистанций.
В предпочтительном варианте положение транспортных средств на прилегающей области проезжей части оценивают с помощью бортового датчика переднего наблюдения. Могут быть использованы также дополнительные автомобильные датчики, в том числе датчики боковых слепых зон или датчики заднего вида.
Расположение относительно соседних транспортных средств (в поперечном и продольном направлениях) передают с помощью датчика переднего наблюдения. Это расположение может быть представлено либо в декартовой системе координат, либо вычислено по полярным координатам. Все движущиеся впереди транспортные средства, обнаруженные датчиком переднего наблюдения, группируют в «полосы движения» на основе их отклонения от прогнозируемой траектории движения оборудованного транспортного средства. Прогнозируемая траектория может быть определена, например, с помощью датчика скорости рыскания или данных карт GPS-системы. Исходя из стандартной ширины полосы движения, предполагается, что полоса движения оборудованного транспортного средства занимает +/- половину ширины полосы движения по прогнозируемой траектории. Ширина смежной полосы движения справа от оборудованного транспортного средства, измеренная относительно его осевой линии, составляет от +½ ширины полосы движения до +1½ ширины полосы движения, при этом ширина смежной полосы движения слева от оборудованного транспортного средства, измеренная относительно его осевой линии, составляет от -½ ширины полосы движения до -1½ ширины полосы движения. Данный расчет может быть выполнен для любого количества полос движения.
После того как все транспортные средства будут сгруппированы в полосы движения, выполняют подсчет общего количества обнаруженных транспортных средств в каждой полосе движения. Количество транспортных средств на полосе движения оборудованного транспортного средства должно включать оборудованное транспортное средство. Для завершения расчета интенсивности движения необходима измеренная дистанция на каждой полосе движения. На полосе движения оборудованного транспортного средства это значение получают путем определения самого дальнего движущегося впереди транспортного средства. Предпочтительно добавить длину оборудованного транспортного средства и предположительную длину самого дальнего движущегося впереди транспортного средства к продольному относительному расположению, измеряемому относительно передней части оборудованного транспортного средства до задней части самого дальнего движущегося впереди транспортного средства для получения продольного расстояния, на котором обнаружены транспортные средства на полосе движения оборудованного транспортного средства. Если движущиеся впереди транспортные средства отсутствуют, указанное расстояние устанавливают в значение по умолчанию, равное максимально надежному расчетному расстоянию обнаружения для датчика.
На смежных полосах движения дистанцию преимущественно определяют в зависимости от зоны наблюдения датчика переднего наблюдения для определения точки, ближайшей к оборудованному транспортному средству, в которой может быть обнаружено транспортное средство на смежной полосе движения. Такую дистанцию обнаружения вычитают из продольного относительного расположения самого дальнего транспортного средства на смежной полосе движения (желательно снова добавить расчетную длину обнаруженного транспортного средства и выполнить возврат по умолчанию к максимально надежному расстоянию обнаружения, если транспортных средств не обнаружено). Отношение каждого соответствующего количества транспортных средств к соответствующему расстоянию обнаружения будет являться интенсивностью движения на соответствующей полосе движения. Общую интенсивность движения получают из отношения общего количества транспортных средств к сумме дистанций.
Краткое описание чертежей
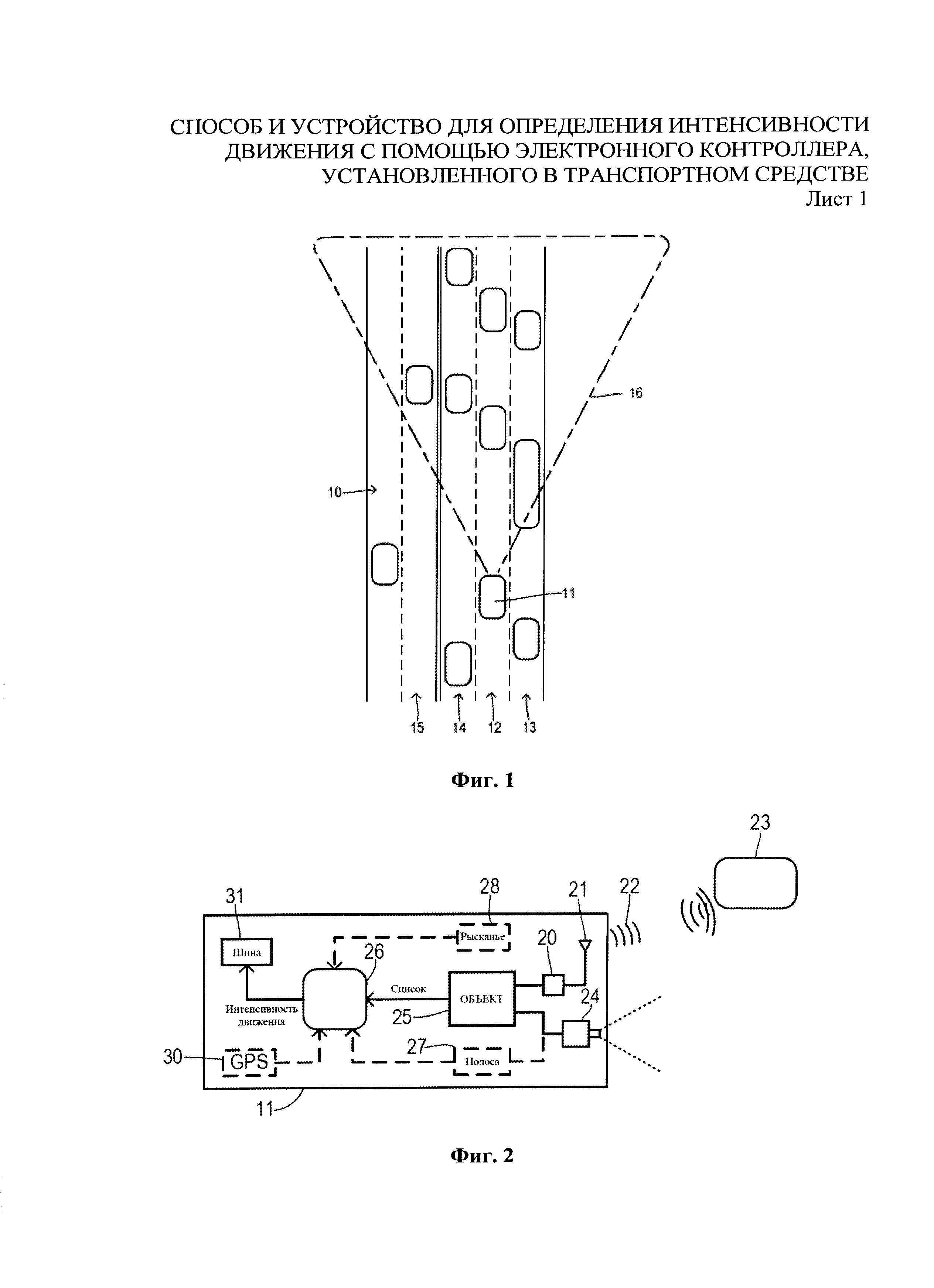
На фиг. 1 показано оборудованное транспортное средство, движущееся по проезжей части в потоке других транспортных средств.
На Фиг. 2 показана блок-схема одного из вариантов автомобильного устройства, соответствующего настоящему изобретению.
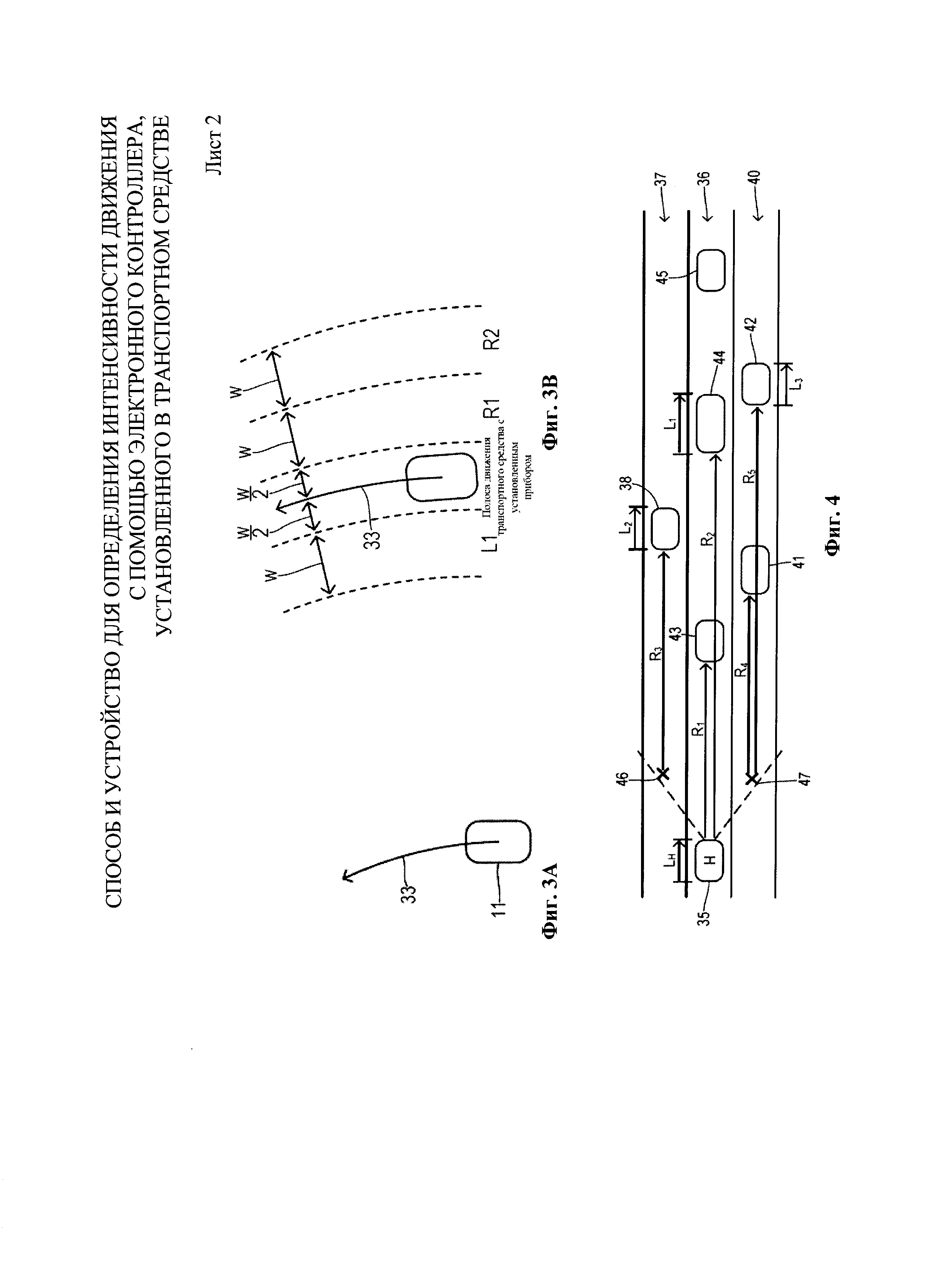
На фиг. 3A и 3B показаны прогнозируемая траектория оборудованного транспортного средства и положение полос движения, соответствующее прогнозируемой траектории.
На Фиг. 4 показана схема соседних транспортных средств, группируемых в соответствующие полосы движения с расстояниями относительно оборудованного транспортного средства или от точки в зоне наблюдения датчика на смежной полосе движения.
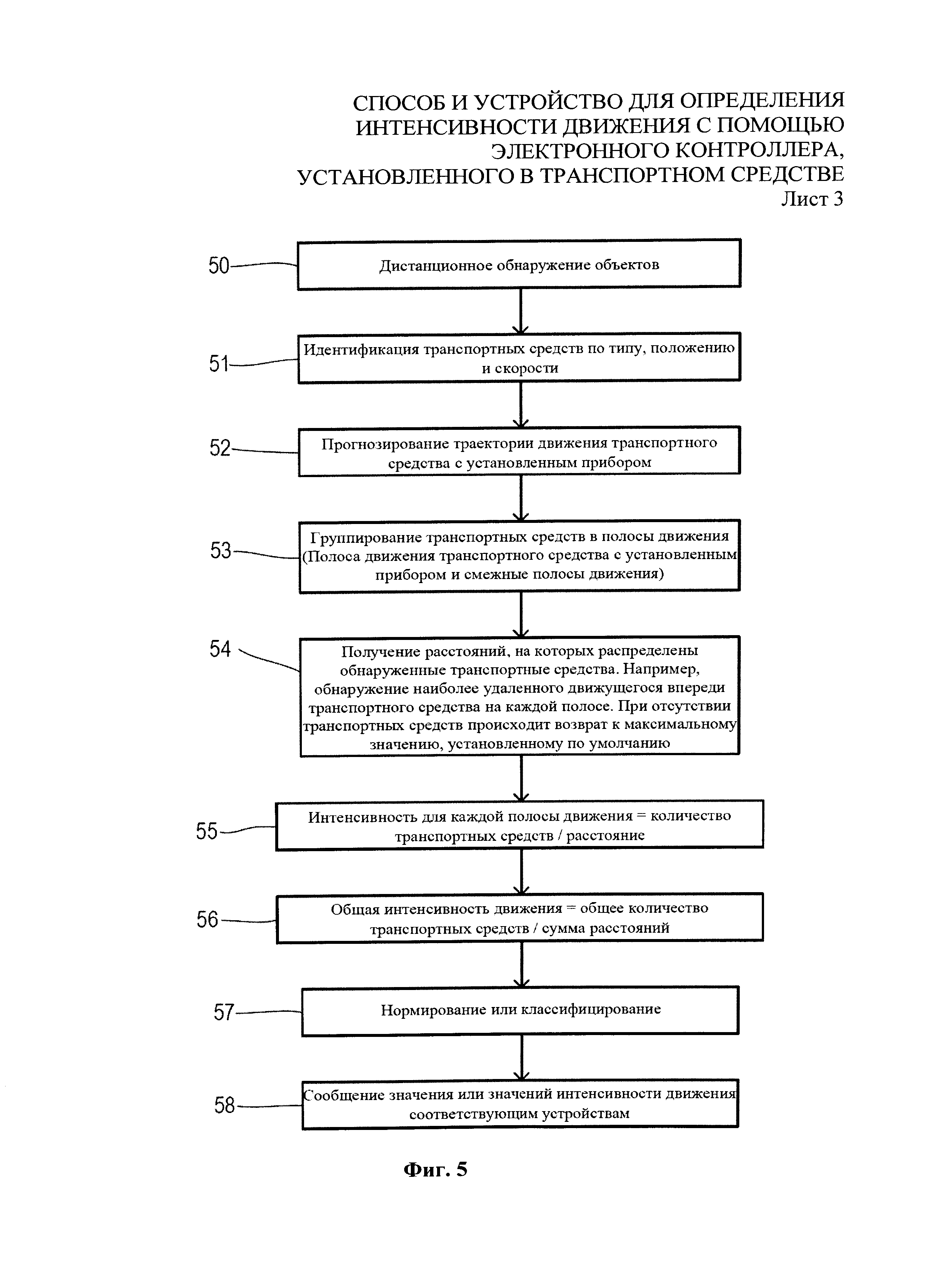
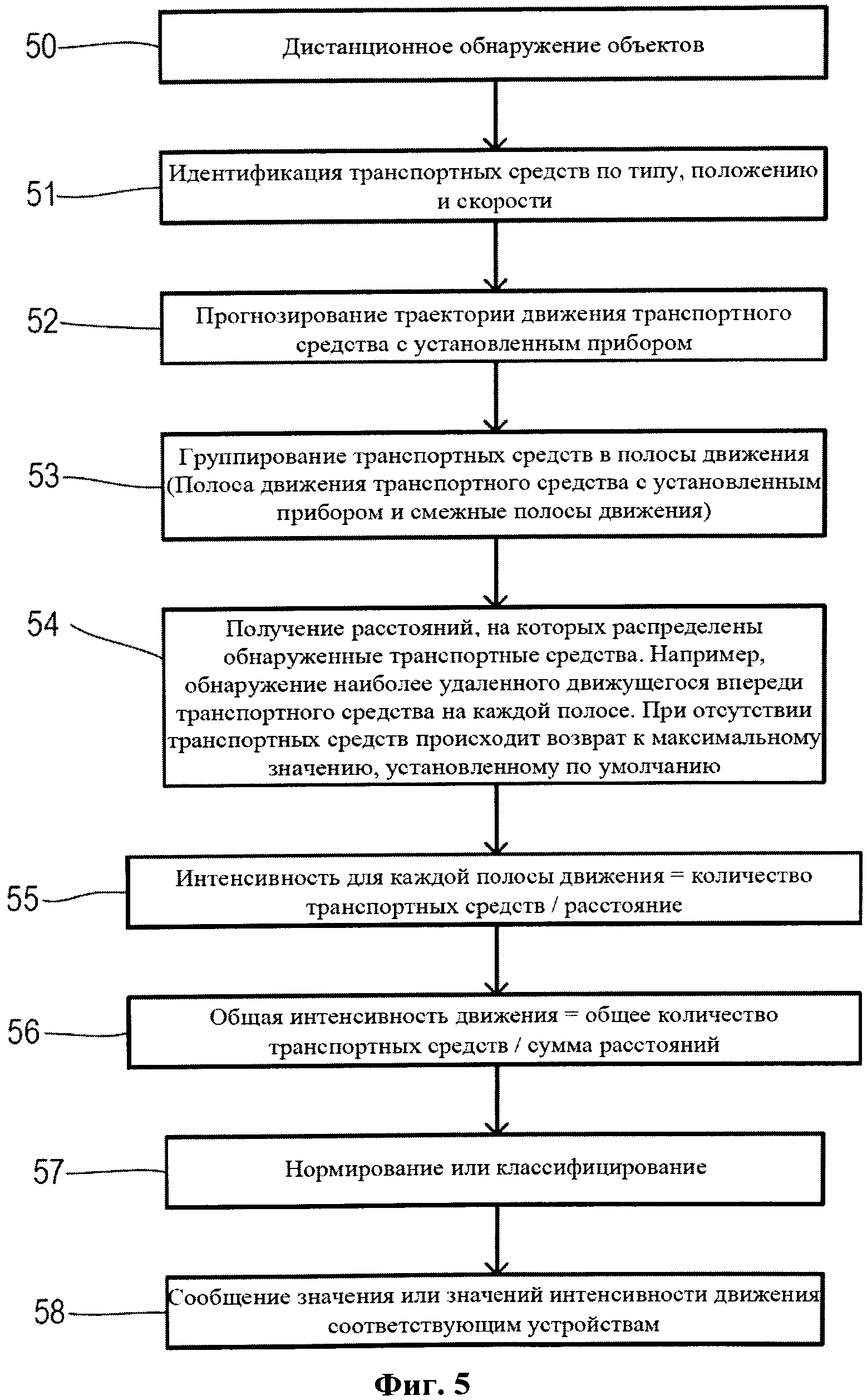
На Фиг. 5 показана блок-схема одного из предпочтительных вариантов изобретения.
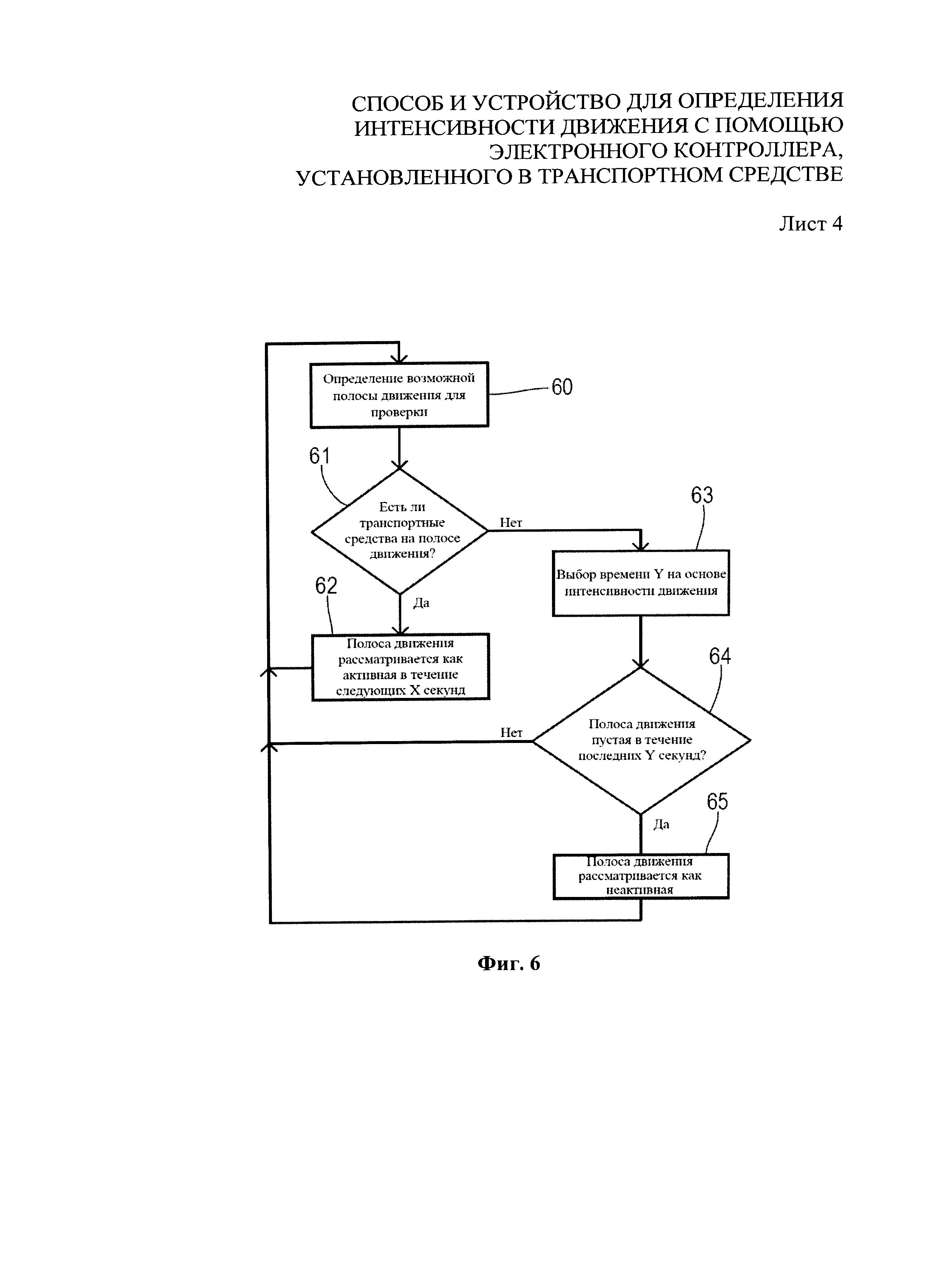
На Фиг. 6 показана блок-схема способа проверки смежных полос движения.
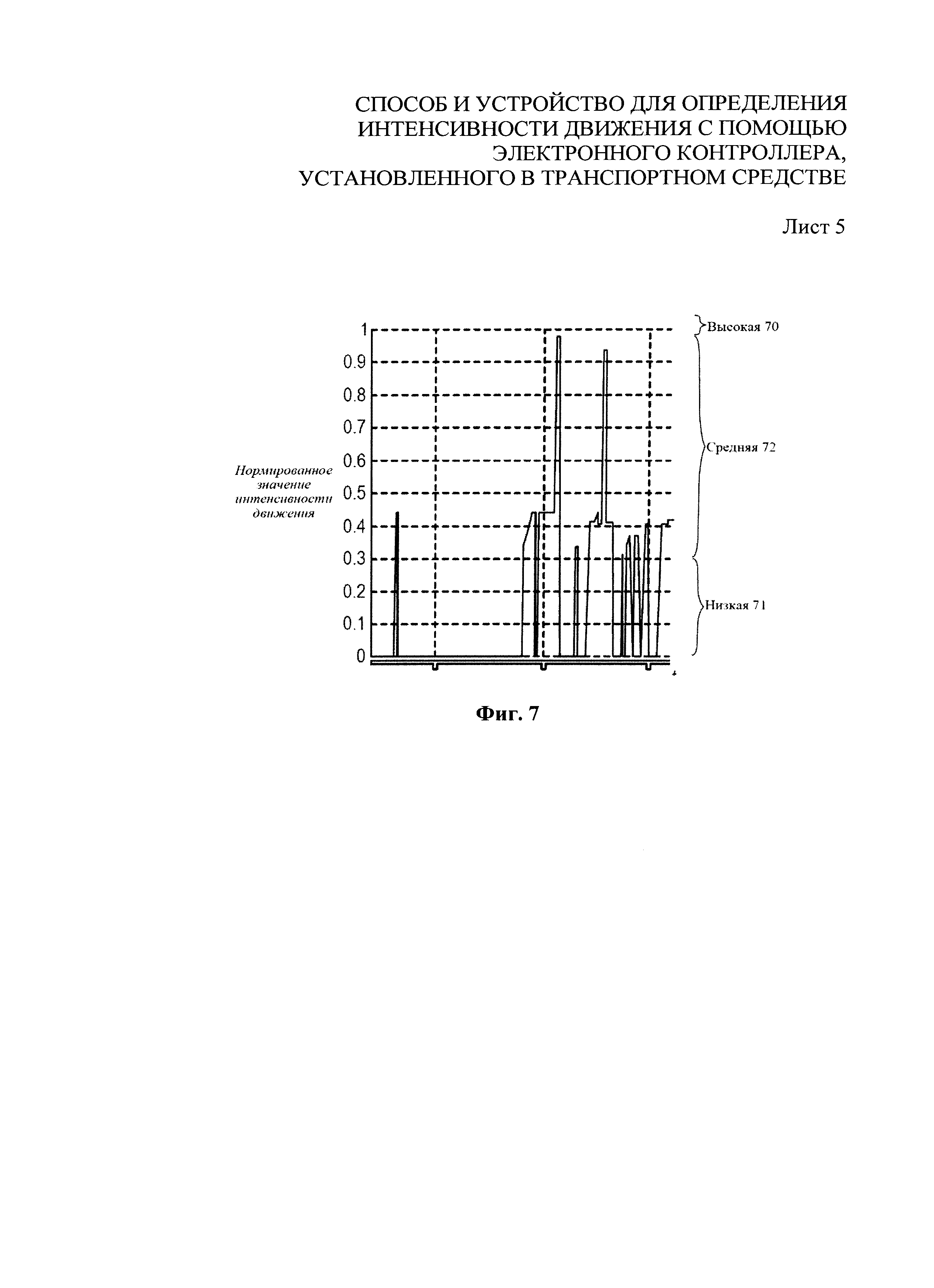
На Фиг. 7 показан график измеренной интенсивности движения на примере части ездового цикла.
Осуществление изобретения
На фиг. 1 разделенную проезжую часть 10 пересекает оборудованное транспортное средство 11, движущееся по полосе 12 движения оборудованного транспортного средства, к которой примыкает смежная полоса 13 движения справа и смежная полоса 14 движения слева. Вторая смежная полоса 15 движения слева является полосой встречного движения. Оборудованное транспортное средство оснащено системой распознавания и слежения за удаленными объектами переднего наблюдения, которая может быть состоять из серийной имеющейся в продаже системы датчиков, например, радиолокационной станции с электронным сканированием луча ESR, производимой компанией «Delphi Automotive LLP» или системой безопасности с датчиком переднего наблюдения, производимой компанией «TRW Automotive Holdings Corporation». В системах могут быть использованы радиолокационный датчик и (или) камера или видеосистема для обнаружения удаленных объектов в зоне наблюдения вокруг оборудованного транспортного средства и слежения за обнаруженными объектами в течение продолжительного периода времени. По результатам слежения система составляет список объектов, состоящий из определения типа каждого объекта, его относительного расположения и текущего перемещения. Как показано на фиг. 1, система обнаружения объектов может иметь зону 16 наблюдения, которая в предпочтительном варианте соответствует системе переднего наблюдения.
На фиг. 2 показано транспортное средство 11, в котором установлены компоненты, используемые в соответствии с настоящим изобретением. Радиолокационный приемопередатчик 20 соединен с радиолокационной антенной 21 для передачи сигналов 22 сканирующей радиолокационной станции и получения сигналов, отраженных от соседних объектов 23 (например, от соседних транспортных средств). Удаленные объекты также могут быть обнаружены с помощью оптических средств (работающих, например, в спектре видимого излучения), включая камеру 24. Приемопередатчик 20 и камера 24 соединены с модулем 25 обнаружения и слежения за объектами стандартной конструкции, образуя единую систему обнаружения удаленных объектов, передающую список отслеживаемых объектов модулю 26 управления интенсивностью движения. Для каждого отслеживаемого объекта список может содержать различные параметры, включая, но не ограничиваясь этим, относительное расположение, тип объекта (например, легковое или грузовое транспортное средство), относительную скорость и (или) абсолютную скорость.
В процессе работы контроллер 26 для измерения интенсивности движения прогнозирует траекторию движения оборудованного транспортного средства в соответствии с одним из нескольких способов. Например, в оптической системе 27 распознавания полосы движения, соединенной с камерой 24, может быть использовано распознавание изображений для обнаружения разметки полос движения или прочих элементов для определения границ полос движения. Таким образом, траектории полосы движения оборудованного транспортного средства и смежных полос движения могут быть переданы непосредственно на контроллер 26. Датчик 28 рысканья может быть соединен с контроллером 26 для получения информации о боковом ускорении, используемой контроллером 26 для прогнозирования траектории полосы движения. Система GPS-навигации / картографическая система 30 может быть соединена с контроллером 26 для установления положения полосы движения на основе полученных географических координат оборудованного транспортного средства 11 в виде стрелки на карте проезжей части.
На основе подсчета транспортных средств и дистанций на полосах движения, полученных в соответствии с дальнейшим описанием, контроллер 26 генерирует данные об интенсивности движения, чтобы передать их на прочие соответствующие контроллеры (не показаны) и (или) устройства, изменяющие свою работу в соответствии с интенсивностью движения. В транспортном средстве такие показания могут быть переданы по мультиплексной шине 31. На основе измеренной интенсивности движения могут быть отрегулированы пороговые значения и другие аспекты функционирования других систем с учетом фактических условий дорожного движения, обнаруженных в непосредственной близости от транспортного средства с бортовым измерителем в режиме реального времени.
Как показано на фиг. 3A, прогнозируемая траектория 33 движения оборудованного транспортного средства 11 может быть использована для получения ближайшего участка, пересекаемого полосой движения оборудованного транспортного средства. При использовании датчика скорости рыскания для целей прогнозирования траектории движения транспортного средства на основе бокового ускорения незначительное или практическое нулевое боковое ускорение ведет к получению прямой траектории движения. Более высокое боковое ускорение ведет к получению криволинейной траектории движения. Как показано на фиг. 3B, осевая линия прогнозируемого курса полосы движения оборудованного транспортного средства совпадает с прогнозируемой траекторией 33, а ее ширина превышает ширину W заданной полосы движения на ½ с каждой стороны. На основании прогнозируемого курса движения оборудованного транспортного средства определяют несколько смежных полос движения, включая смежную траекторию L1 слева, смежную траекторию R1 справа и вторую смежную траекторию R2 справа, идущую параллельно полосе движения оборудованного транспортного средства.
После прокладки полосы движения оборудованного транспортного средства и смежных полос движения все отслеживаемые транспортные средства могут быть сгруппированы в соответствии с участками, охватываемыми полосами движения. На фиг. 4 показан пример транспортных средств, сгруппированных относительно оборудованного транспортного средства 35 на полосе 36 движения оборудованного транспортного средства. Хотя на полосе 36 движения оборудованного транспортного средства показаны четыре транспортных средства, фактическое количество транспортных средств включает в себя только три транспортных средства (то есть подсчитаны будут только транспортные средства 35, 43, и 44). Транспортное средство 45, находящееся на максимальном расстоянии обнаружения системы обнаружения объектов, при подсчете транспортных средств не учитывается, поскольку оно не будет обнаружено (так как транспортное средство 44 - большое грузовое транспортное средство, оно закрывает обзор транспортного средства 45). Для смежной полосы 37 движения слева итоговое количество транспортных средств будет равным одному транспортному средству 38. Для смежной полосы 40 движения справа количество транспортных средств будет равным двум транспортным средствам 41 и 42.
После получения информации о количестве транспортных средств необходимо получить информацию о расстояниях, на которых распределены подсчитанные транспортные средства. Для дистанционных датчиков в зоне наблюдения существует максимальное расстояние обнаружения любых присутствующих транспортных средств. Даже в случае присутствия транспортных средств на максимальном расстоянии обнаружения, их обзор может блокироваться обнаруженным транспортным средством. В примере на фиг. 4 количество транспортных средств на полосе 36 движения оборудованного транспортного средства, включает в себя транспортное средство 43, обнаруженное на расстоянии R1, и транспортное средство 44, обнаруженное на расстоянии R2. Необнаруженное транспортное средство 45, находящееся на полосе движения 36, не учитывается при подсчете, а соответствующий участок полосы 36 движения оборудованного транспортного средства не влияет на расчет интенсивности движения. Таким образом, для расчета интенсивности движения используют дистанцию до самого дальнего транспортного средства из всех, сгруппированных на каждой полосе движения. В полосе 36 движения оборудованного транспортного средства самым дальним транспортным средством является транспортное средство 44, поэтому расстояние на этой полосе охватывает расстояние R2 между оборудованным транспортным средством 35 и транспортным средством 44. Желательно, чтобы расстояние, учитываемое при расчете интенсивности движения, охватывало длину LH оборудованного транспортного средства и длину транспортного средства 44, равную L1.
На смежной полосе движения сбоку от оборудованного транспортного средства 35 соответствующее расстояние, на основе которого выполняют расчет интенсивности движения, как правило, отсчитывается не от оборудованного транспортного средства, так как маловероятно, что зона наблюдения системы датчиков будет точно совпадать с передней частью оборудованного транспортного средства 35. При использовании только детектора переднего наблюдения для обнаружения транспортного средства на смежной полосе движения необходимо, чтобы он находился немного впереди оборудованного транспортного средства 35. Точки 46 и 47 на смежных полосах движения соответствуют самым близким точкам в зоне наблюдения датчиков. Расстояние до этих точек может быть измерено заранее при проектировании транспортного средства.
При использовании систем обнаружения объектов с датчиками других типов исходным положением при измерении расстояния могут быть другие положения относительно оборудованного транспортного средства. При использовании детекторов с датчиками бокового наблюдения и заднего вида исходное положение для определения расстояний на смежных полосах движения может находиться даже за оборудованным транспортным средством 35 или может быть определено в соответствии с самого дальним обнаруженным транспортным средством, находящимся позади оборудованного транспортного средства на соседней полосе движения.
На соседней полосе 40 движения справа расстояние, используемое для расчета интенсивности движения, состоит из расстояния R5 между точкой 47 и самым дальним транспортным средством 42 на полосе 40 движения плюс длина L3, соответствующая типу транспортного средства, определенному системой слежения за объектами (например, стандартное легковое транспортное средство или грузовое транспортное средство). Аналогичным образом расстояние на смежной полосе 37 движения охватывает расстояние R3 между точкой 46 и транспортным средством 38 и дополнительную длину транспортного средства 38, равную L2 (расчетную или измеренную).
На фиг. 5 показан один из предпочтительных способов, при котором дистанционное обнаружение объектов вокруг оборудованного транспортного средства выполняют на этапе 50. Транспортные средства, обнаруженные системой обнаружения удаленных объектов, идентифицируют на этапе 51 по типу, местонахождению и скорости с целью отслеживания в течение продолжительного периода времени. На этапе 52 контроллер для определения интенсивности движения прогнозирует траекторию движения оборудованного транспортного средства. На основании спрогнозированной траектории движения оборудованного транспортного средства и соответствующего положения полос движения смежных с полосой движения оборудованного транспортного средства, на этапе 53 все обнаруженные транспортные средства группируют в полосы движения.
На этапе 54 в каждой полосе движения, в которой обнаружены транспортные средства, вычисляют самое дальнее движущееся впереди транспортное средство. Для получения дистанции, на которой находятся транспортные средства на полосе движения оборудованного транспортного средства, используют дистанцию вместе с длиной оборудованного транспортного средства и длиной самого дальнего транспортного средства. Для смежных полос движения учитывают самое дальнее транспортное средство и его длину в сочетании с наиболее близкой точкой обнаружения на полосе движения. При отсутствии транспортных средств на полосе движения соответствующую дистанцию возвращают к значению по умолчанию, которое равно максимальной дистанции обнаружения датчиков на прогнозируемой траектории соответствующей полосы движения. Такой предварительно установленной максимальной дистанцией обнаружения может быть фиксированное значение, сохраненное в контроллере, или значение, вычисленное на основе таких факторов окружающей среды, как дальность горизонта. На этапе 55 вычисляют интенсивность движения для каждой полосы движения, равную соответствующему количеству транспортных средств, поделенному на расстояние, определенное на каждой соответствующей полосе движения. На этапе 56 определяют общую интенсивность движения, равную общему количеству транспортных средств, поделенному на сумму расстояний.
Необработанные значения интенсивности движения, полученные на этапах 55 и 56, могут быть использованы как есть, либо нормированы или классифицированы на этапе 57. Нормирование, как правило, заключается в преобразовании значений в пределах от 0 до 1, выраженных в процентах от предварительно установленного верхнего порогового значения интенсивности движения. Например, необработанное значение общей интенсивности движения будет разделено на пороговое значение, а затем выражено в виде дробного числа относительно максимального значения, равного 1. Предварительно установленное верхнее пороговое значение интенсивности движения может быть получено опытным путем на основе преобладающих условий дорожного движения на рынке, где планируют продажи и эксплуатацию транспортного средства.
Классификация необработанных значений интенсивности движения может состоять из определения нижнего, среднего и высокого уровней. В зависимости от пределов, в которых находятся необработанные значения интенсивности движения, могут быть установлены и сообщены прочим системам транспортного средства соответствующие низкий, средний и высокий уровни интенсивности движения. Таким образом, на этапе 58 соответствующим узлам или системам сообщают необработанное, нормированное, классифицированное значение или значения интенсивности движения.
Предпочтительно способ, соответствующий настоящему изобретению, учитывает только активные полосы движения, наличие которых рядом с оборудованным транспортным средством проверяют в соответствии с фиг. 6. Например, если зона, соответствующая возможной полосе движения, является обочиной проезжей части, то она, как правило, не учитывается при определении интенсивности движения. Тем не менее, при некоторых обстоятельствах желательно наблюдать за интенсивностью движения в зоне обочины или иной зоне для определения возможных путей предотвращения столкновения в случае выявления такой опасности.
В способе, показанном на фиг. 6, для определения активных полос движения на этапе 60 проверяют (например, с предварительно установленного расстояния двух смежных полос движения с каждой стороны от оборудованного транспортного средства). На этапе 61 при обнаружении транспортного средства на активной полосе движения выполняется проверка. При обнаружении на такой полосе движения движущегося транспортного средства, на этапе 62 полосу рассматривают как активную в течение предварительно установленного периода времени (например, 60 секунд). Затем происходит возврат к этапу 64 с целью определения следующей активной полосы.
При отсутствии транспортных средств на полосе движения, проверенной на этапе 61, происходит переход к этапу 63, на котором для определения значения времени Y используют общую интенсивность движения на текущий момент. В условиях высокой интенсивности движения вероятность пустой полосы движения снижается. В условиях низкой интенсивности движения возрастает вероятность отсутствия транспортных средств на активной полосе движения в течение длительного периода времени. Таким образом, выбор значения времени Y осуществляют на основе величин, отражающих среднее время ожидания, в течение которого сохраняется вероятность появления движущегося транспортного средства на пустой полосе движения. На этапе 64 проверяют, оставалась ли проверяемая полоса движения пустой в течение последних Y секунд. В случае отрицательного результата полосу движения снова рассматривают как активную, после чего происходит возврат к этапу 60. При отсутствии транспортных средств на полосе движения в течение Y секунд на этапе 65 полосу уже не рассматривают как активную. Неактивную полосу движения обычно не учитывают при расчете интенсивности движения до обнаружения на ней транспортного средства.
На фиг. 7 показаны примеры значений интенсивности движения, полученные за ездовой цикл при различных условиях интенсивности движения. Значения интенсивности движения были упорядочены в пределах от 0 до 1 на основе верхнего порогового значения 70 интенсивности движения. При желании вместо нормированного значения, основанного на соответствующих пороговых значениях, прочим системам транспортного средства могут быть переданы классифицированные по степеням значения интенсивности движения, низкая степень 71 интенсивности движения или средняя степень 72 интенсивности движения.
Способ и устройство для предоставления навигационного отчета
Устройство для помощи водителю
Система и способ отображения мгновенного расхода топлива транспортного средства
Способ и система управления приложением "интернет радио" в транспортном средстве
Устройство и способ управления работой в конфиденциальном режиме в транспортном средстве
Система и способ прерывания запрашивания инструкций с целью оповещения о предстоящем вводе по каналу беспроводной связи
Система и способ для детектирования вторичного устройства связи и соединения с ним
Система и способ для обеспечения беспроводного сетевого соединения
Сеть доставки услуг
Система электропривода транспортного средства
Система транспортного средства для управления запуском и остановкой двигателя
Система обнаружения и идентификации присутствия пассажира в транспортном средстве
Система транспортного средства для регулирования его движения в транспортном потоке
Система и способ идентификации прицепа транспортного средства
Способ обнаружения аномального состояния водителя транспортного средства
Система и способ для обнаружения опасного вождения и компьютер транспортного средства
Уменьшенные сетевой поток и вычислительная нагрузка с использованием средства динамического пространственного и временного планирования
Транспортное средство с улучшенной системой связи
Транспортное средство, способ и система для планирования режимов транспортного средства с использованием изученных предпочтений пользователя
Система для управления транспортным средством на основании предыдущих поездок

