Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ИДЕНТИФИКАЦИИ ПРИЦЕПА ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к системам и способам обнаружения и идентификации прицепа транспортного средства.
Уровень техники
Прицепы требуют проведения планового технического обслуживания с интервалом, обычно измеряемым на основании расстояния (в милях), пройденного буксируемым прицепом. У водителей транспортного средства, которые буксируют несколько разных прицепов, могут возникать сложности, связанные с отслеживанием расстояния (в милях), пройденного каждым прицепом. Некоторые транспортные средства имеют системы, которые могут отслеживать расстояние (в милях), пройденное каждым прицепом. С помощью такой системы водитель может быть уверен в точности и простоте получения значений расстояния (в милях), пройденного каждым прицепом.
Раскрытие изобретения
Пример системы включает в себя камеру, выполненную с возможностью захватывать изображение прицепа, присоединенного к транспортному средству, и выдавать сигнал, соответствующий полученному изображению. Система также включает в себя интерфейс пользователя, выполненный с возможностью отображать полученное изображение пользователю и получать входной сигнал от пользователя, и процессор, выполненный с возможностью сопоставлять собранные данные о транспортном средстве с прицепом, по крайней мере частично на основании входного сигнала от пользователя.
Пример транспортного средства включает в себя прицеп, камеру, интерфейс пользователя, одометр и процессор. Камера выполнена с возможностью захватывать изображение прицепа и выдавать сигнал, соответствующий полученному изображению. Интерфейс пользователя выполнен с возможностью отображать полученное изображение пользователю и получать входной сигнал от пользователя. Одометр выполнен с возможностью отслеживать расстояние, пройденное транспортным средством во время буксировки прицепа. Процессор выполнен с возможностью идентифицировать прицеп по полученному изображению и сопоставлять расстояние, пройденное транспортным средством, с прицепом, по крайней мере частично на основании входного сигнала от пользователя. Входной сигнал от пользователя подтверждает, что прицеп, идентифицированный процессором, является прицепом, представленным на полученном изображении.
В другом примере способ предусматривает захват изображения прицепа, присоединенного к транспортному средству, прием сигнала, соответствующего полученному изображению, отображение полученного изображения пользователю, прием входного сигнала от пользователя и сопоставление собранных данных о транспортном средстве с прицепом с помощью процессора, по крайней мере частично на основании входного сигнала от пользователя.
Краткое описание чертежей
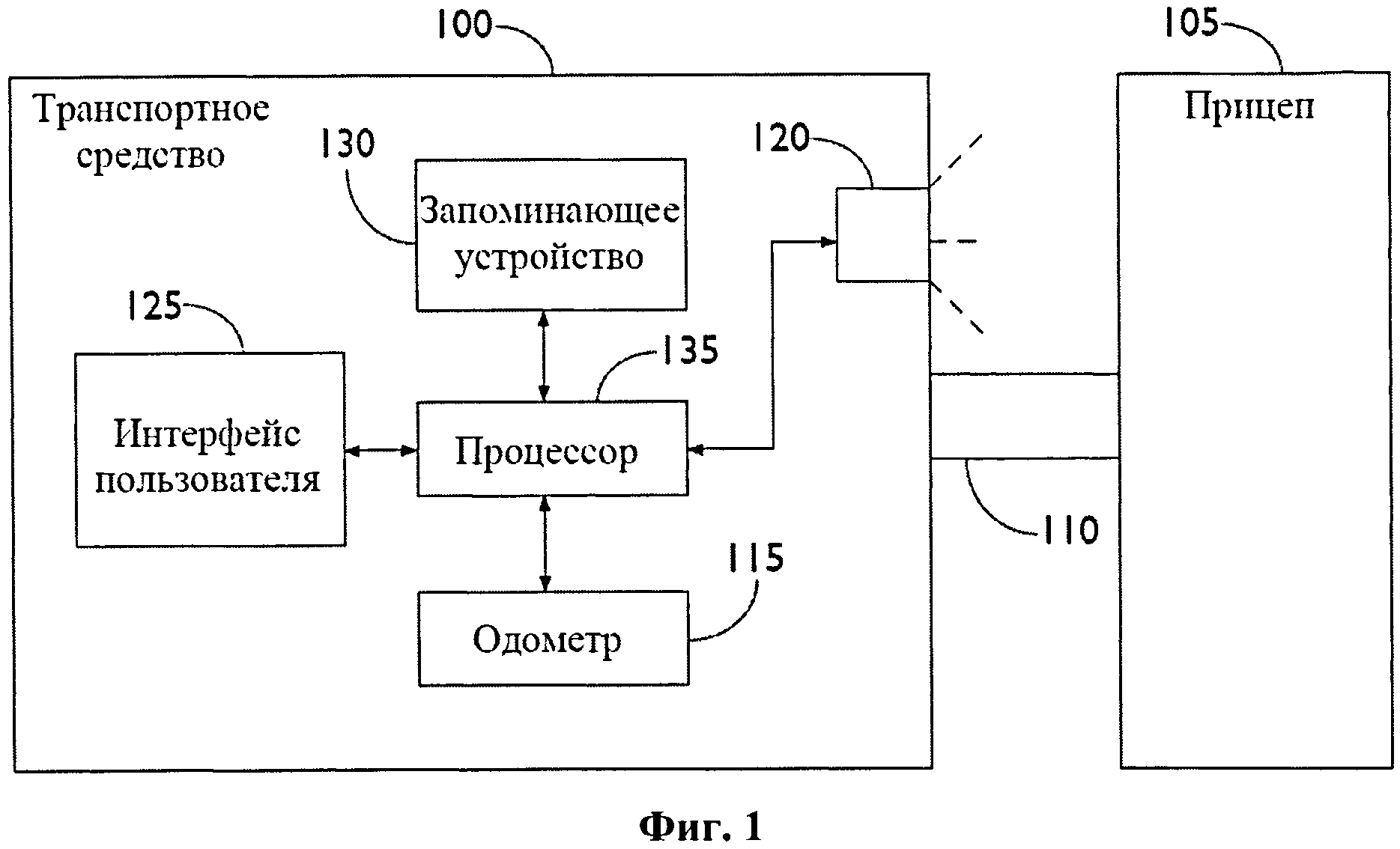
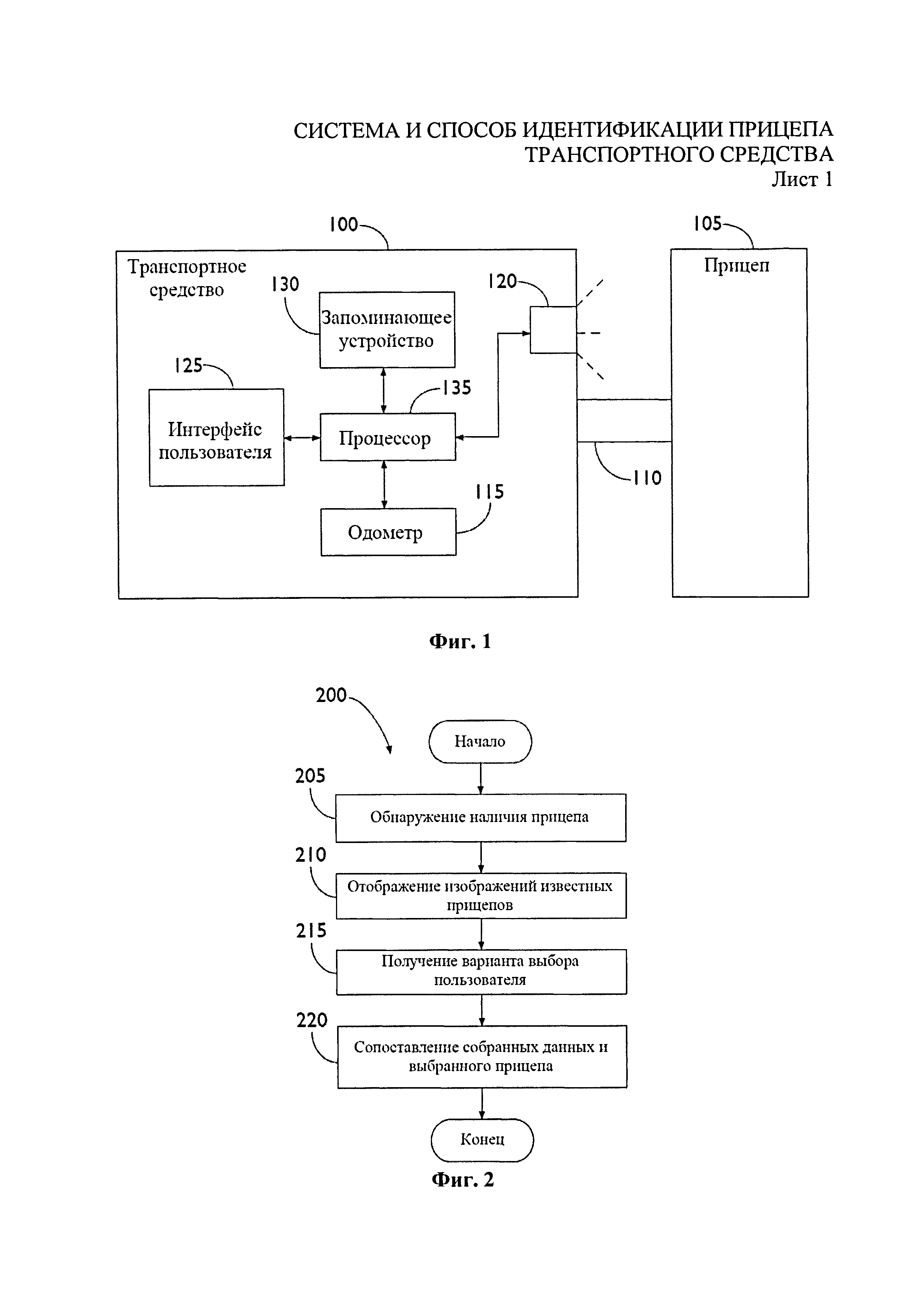
На Фиг. 1 представлен пример схемы транспортного средства, выполненного с возможностью обеспечить идентификацию присоединенного к нему прицепа и сопоставлять собранные данные с идентифицированным прицепом.
На Фиг. 2 представлена блок-схема примера процесса, который может быть выполнен одним или несколькими компонентами транспортного средства с Фиг. 1 для сопоставления собранных данных с идентифицированным прицепом.
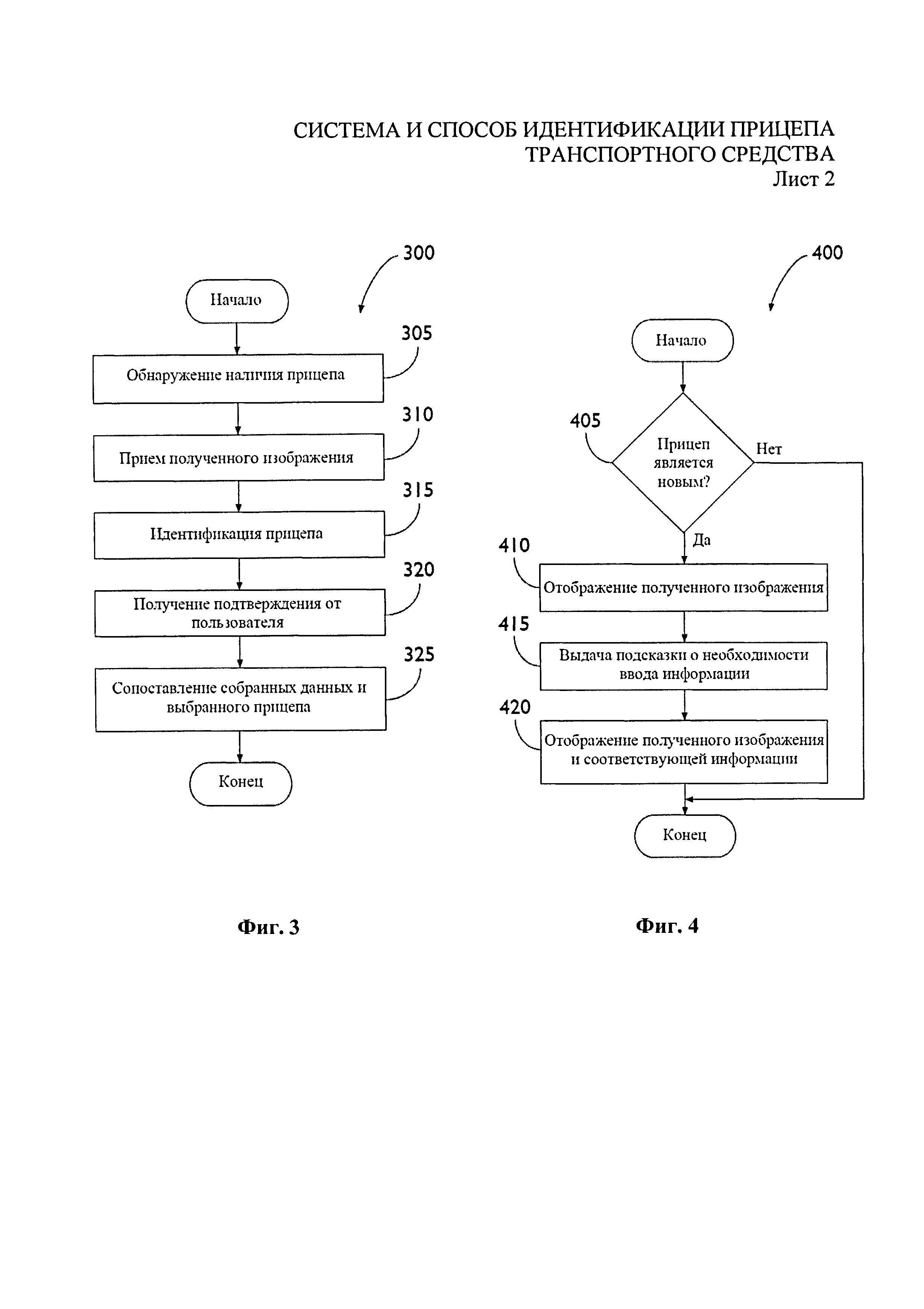
На Фиг. 3 представлена блок-схема примера процесса, который может быть выполнен одним или несколькими компонентами транспортного средства с Фиг. 1 для автоматической идентификации прицепа.
На Фиг. 4 представлена блок-схема примера процесса, который может быть выполнен одним или несколькими компонентами транспортного средства с Фиг. 1 для получения информации о новом прицепе.
Осуществление изобретения
На Фиг. 1 представлен пример транспортного средства 100, выполненного с возможностью отслеживать значения различных параметров, сопоставленных с прицепом, буксируемым с помощью транспортного средства. Транспортное средство 100 может принимать различные формы и включать в себя дополнительные и/или альтернативные компоненты и приспособления. Хотя в примере представлено транспортное средство 100, компоненты, представленные на фигурах, не должны рассматриваться как ограничивающие. На самом деле, могут быть использованы дополнительные или альтернативные компоненты и/или варианты реализации.
Как показано на Фиг. 1, прицеп 105 соединяется с транспортным средством 100, например, с помощью сцепки 110, при этом транспортное средство 100 содержит одометр 115, камеру 120, интерфейс 125 пользователя, запоминающее устройство 130 и процессор 135.
Одометр 115 может быть выполнен с возможностью отслеживать расстояние, пройденное транспортным средством 100, прицепом 105 или и тем и другим. Одометр 115 может быть выполнен с возможностью отсчитывать количество оборотов любого одного или нескольких колес (не показаны) транспортного средства 100. В качестве альтернативы одометр 115 может использовать навигационную систему, напримерспутниковую систему позиционирования (GPS), для отслеживания расстояния, пройденного транспортным средством 100, прицепом 105 или и тем и другим.
Камера 120 может быть выполнена с возможностью захватывать изображение прицепа 105, присоединенного к транспортному средству 100, и выдавать сигнал изображения, соответствующий полученному изображению. Камера 120 может иметь кадровое окно (не показано), через которое свет проходит и направляется на поверхность записи (не показана). Датчик изображений может создавать виртуальное изображение, получаемое при направлении света на поверхность записи, при этом выходной сигнал датчика изображений может представлять собой сигнал, соответствующий полученному изображению. Камера 120 может передавать выходной сигнал изображения в электронном виде или по беспроводному каналу, например, на процессор 135. Камера 120 может быть расположена в любом месте на транспортном средстве 100 на линии видимости прицепа 105. Например, камера 120 может быть расположена на заднем буфере транспортного средства 100.
Пользовательский интерфейс 125 может быть выполнен с возможностью отображать полученное изображение и другие изображения пользователю и принимать входной сигнал от пользователя. Пользовательский интерфейс 125 может включать в себя дисплей, выполненный с возможностью отображать пользователю текст, изображения и т.д. В некоторых возможных вариантах воплощения пользовательский интерфейс 125 может включать в себя устройство ввода, выполненное с возможностью принимать входной сигнал от пользователя. При других возможных подходах пользовательский интерфейс 125 может включать в себя сенсорный экран, который одновременно работает как дисплей и как устройство ввода. Это значит, что сенсорный экран может отображать пользователю текст, изображения, выбираемые опции, например, кнопки и т.п., и принимать входной сигнал от пользователя, когда пользователь прикасается к сенсорному экрану. Пользовательский интерфейс 125 может быть выполнен с возможностью отображать информацию, запрашиваемую у пользователя, и принимать входной сигнал от пользователя после выдачи запроса. При выдаче системой запроса пользователь может вводить запрашиваемую информацию с помощью устройства ввода или с помощью прикосновения к различным частям интерфейса 125 пользователя, если интерфейс 125 пользователя содержит сенсорный экран. В одном примере выбор, сделанный пользователем, может представлять собой выбор одного из отображаемых изображений, которые, как было сказано выше, могут включать в себя изображения известных прицепов и полученное изображение.
При некоторых возможных подходах пользовательский интерфейс 125 и, в частности, устройство ввода могут быть выполнены с возможностью взаимодействовать с другими устройствами, например с внешней камерой (например, с камерой, отличной от описанной выше камеры 120), модулем памяти, флеш-накопителем и т.п. Таким образом, пользовательский интерфейс 125 может обеспечивать для пользователя возможность импорта данных, изображений или и того и другого с внешнего источника. Например, изображения известных прицепов могут быть захвачены с помощью внешней камеры и сохранены на внешнем запоминающем устройстве. С помощью интерфейса 125 пользователя изображения известных прицепов могут быть выгружены, например, на запоминающее устройство 130 транспортного средства 100.
Запоминающее устройство 130 может быть выполнено с возможностью хранить данные, приложения или и то и другое в электронном виде. Запоминающее устройство 130 может быть выполнено с возможностью хранить изображения известных прицепов, включая полученное изображение, а также информацию о каждом из известных прицепов. Другие компоненты транспортного средства 100, например интерфейс 125 пользователя и процессор 135, также могут иметь доступ к данным и приложениям, хранящимся на запоминающем устройстве 130. Как было сказано выше, одно или несколько изображений известных прицепов может быть захвачено камерой 120, встроенной в транспортное средство 100, или внешним источником и сохранено на запоминающее устройство 130. Следовательно, изображения известных прицепов могут представлять собой набор всех полученных ранее изображений известных прицепов, когда-либо присоединяемых к транспортному средству 100.
Процессор 135 может быть выполнен с возможностью сопоставлять собранные данные о транспортном средстве, например, расстояние, пройденное транспортным средством 100, которое было определено с помощью одометра 115, с прицепом 105, идентифицированным по полученному изображению, по крайней мере частично на основании входного сигнала от пользователя, вводимого с помощью пользовательского интерфейса 125. Процессор 135 может быть выполнен с возможностью выдавать пользователю подсказку с помощью пользовательского интерфейса 125 о необходимости подтверждения того, какой прицеп 105 присоединен к транспортному средству 100 в настоящий момент, используя изображения известных прицепов. Процессор 135 также может выдавать команду для пользовательского интерфейса 125 на отображение полученного изображения используемого прицепа 105 пользователю, чтобы упростить выбор. После получения сигнала о выборе пользователем одного из изображений известных прицепов процессор 135 может начать использовать собранные данные о транспортном средстве для выбранного прицепа 105.
Процессор 135 может быть выполнен с возможностью определять наличие прицепа 105. Некоторые способы обнаружения наличия прицепа 105 могут включать в себя использование датчика приближения (не показан), выполненного с возможностью обнаруживать наличие прицепа 105 непосредственно за транспортным средством 100, присоединение прицепа 105 к сцепке 110 или прием входного сигнала от пользователя, указывающего на то, что прицеп 105 присоединен к транспортному средству 100. Процессор 135 может быть выполнен с возможностью выдавать сигнал наличия, указывающий на наличие прицепа 105. Процессор 135 может выдавать сигнал наличия на камеру 120, при этом камера 120 может быть выполнена с возможностью захватывать изображение прицепа 105 при получении сигнала наличия.
Процессор 135 также может быть выполнен с возможностью автоматически идентифицировать используемый прицеп 105 по полученному изображению, например, путем сравнения полученного изображения с изображениями известных прицепов, хранящимися на запоминающем устройстве 130. Процессор 135 может использовать одну или несколько технологий обработки изображений для сравнения полученного изображения с изображениями известных прицепов. Процессор 135 может быть выполнен с возможностью идентифицировать используемый прицеп 105 на основании сходства полученного изображения и одного из изображений известных прицепов. После использования технологии обработки изображений может быть выдан сигнал, представляющий собой степень сходства полученного изображения и одного или нескольких изображений известных прицепов. Процессор 135 может быть выполнен с возможностью обнаруживать совпадение, если степень сходства полученного изображения и одного из изображений известных прицепов превышает заранее заданное пороговое значение. В качестве альтернативы или дополнения процессор 135 может быть выполнен с возможностью выбирать прицеп 105, представленный на изображении с самой высокой степенью сходства с полученным изображением, в качестве выбранного прицепа 105.
Процессор 135 может быть выполнен с возможностью предлагать пользователю с помощью интерфейса 125 о необходимости подтверждения того, что прицеп 105, автоматически идентифицированный процессором 135, совпадает с прицепом 105, изображенным на полученном изображении. При получении положительного ответа процессор 135 может быть выполнен с возможностью сопоставлять автоматически выбранный прицеп 105, по крайней мере, с подгруппой собранных данных о транспортном средстве, например, с расстоянием, которое транспортное средство 100 прошло во время буксировки прицепа 105. Если пользователь не может подтвердить правильность выбора прицепа 105 или при невозможности идентификации совпадающего прицепа 105, процессор 135 может быть выполнен с возможностью предлагать пользователю выбрать правильный прицеп 105 из изображений известных прицепов, либо в качестве альтернативы процессор 135 может быть выполнен с возможностью предлагать пользователю с помощью интерфейса 125 указать, что прицеп 105 является новым прицепом 105. Процессор 135 также может быть выполнен с возможностью автоматически определять, является ли прицеп 105 новым прицепом 105, например, если технология обработки изображений, описанная выше, не позволяет обнаружить совпадение или если степени сходства между полученным изображением и изображениями известных прицепов ниже заранее заданного порогового значения.
В некоторых примерах процессор 135 может быть выполнен с возможностью предлагать пользователю с помощью интерфейса 125 ввести информацию о прицепе 105, представленном на полученном изображении. Это может произойти, например, когда прицеп 105 является новым или когда пользователь выбирает известный прицеп 105 из изображений известных прицепов. Кроме того, процессор 135 может предлагать пользователю ввести дополнительную информацию о прицепе 105 после автоматической идентификации прицепа 105 процессором 135. Процессор 135 может получать и обрабатывать входной сигнал от пользователя, поданный с помощью пользовательского интерфейса 125 и содержащий запрашиваемую информацию. Кроме того, процессор 135 может быть выполнен с возможностью хранить всю полученную информацию на запоминающем устройстве 130. При одном возможном подходе процессор 135 может быть выполнен с возможностью сопоставлять полученную информацию с одним или несколькими известными прицепами путем сохранения полученной информации в базу данных, в которой информация соотнесена с прицепом 105. Пример информации, которая может быть запрошена для одного или нескольких прицепов 105, может включать в себя название прицепа 105, идентификатор, например, серийный номер, марку и модель прицепа 105, дату приобретения, данные о техническом обслуживании прицепа 105 и прочую информацию о прицепе 105. Также может быть запрошена другая информация.
После идентификации прицепа 105 (процессором 135 в автоматическом режиме или на основании пользовательского выбора) процессор 135 может сопоставить собранные данные о транспортном средстве с прицепом 105, присоединенным в настоящий момент к транспортному средству 100, и сохранить собранные данные на запоминающее устройство 130. Пример собранных данных о транспортном средстве может включать в себя расстояние, пройденное транспортным средством 100 с присоединенным прицепом 105. Таким образом, транспортное средство 100 может отслеживать общее расстояние, пройденное прицепом 105 с транспортным средством 100.
Поскольку пользователь либо выбирает присоединенный прицеп 105, либо подтверждает выбор прицепа 105, автоматически выбранного процессором 135, процессор 135, скорее всего, сопоставит собранные данные о транспортном средстве с правильным прицепом 105, в частности, если одно транспортное средство 100 буксирует различные прицепы 105 в разное время. Таким образом, данные, хранящиеся на запоминающем устройстве 130, могут точно отражать использование прицепа 105 с транспортным средством 100. Кроме того, на основании этих данных пользователь может легко определить, когда требуется выполнить техническое обслуживание прицепа 105.
В общем случае компьютерные устройства могут включать в себя машиночитаемые инструкции, которые могут быть выполнены одним или несколькими описанными выше вычислительными устройствами. Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и/или технологий программирования, включая, но не ограничиваясь перечисленным, языки Java™, C, C++, Visual Basic, Java Script, Perl и т.д. или их комбинации. В общем случае процессор или микропроцессор принимает инструкции, например, из запоминающего устройства или машиночитаемого носителя информации и выполняет эти инструкции, тем самым реализуя один или несколько процессов, например, описанных выше. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей.
Машиночитаемый носитель (сюда также относятся носители, читаемые процессором) включает в себя любые энергонезависимые носители (например, материальные носители), предоставляющие данные (например, инструкции), которые могут быть обработаны компьютером (например, процессором вычислительного устройства). Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные и оперативные запоминающие устройства. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которые обычно являются частью основного запоминающего устройства. Такие инструкции могут быть переданы с помощью одного или нескольких средств передачи данных, например, с помощью коаксиальных кабелей, медных кабелей и оптоволоконных кабелей, включая провода, которые являются частью системной шины, соединенной с процессором компьютера. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
Базы данных, архивы или другие описанные хранилища данных могут включать в себя различные механизмы для хранения, доступа и чтения различных данных, например, иерархические базы данных, наборы файлов в файловой системе, базы данных приложения в соответствующем формате, реляционные системы управления базами данных (RDBMS) и т.д. Каждое такое хранилище данных обычно встроено в вычислительное устройство с операционной системой, например, одной из указанных выше, а доступ к ним осуществляется через сеть любым из известных способов. Доступ к файловой системе может быть выполнен из операционной системы, при этом такая система может поддерживать различные форматы файлов. RDBMS обычно использует язык структурированных запросов (SQL) вместе с языком создания, хранения, редактирования и выполнения сохраненных процедур, например, PL/SQL.
В некоторых примерах элементы системы могут представлять собой машиночитаемые инструкции (например, программное обеспечение) на одном или нескольких компьютерных устройствах (например, серверах, персональных компьютерах и т.д.) и могут храниться на соответствующем машиночитаемом носителе (например, дисках, запоминающих устройствах и т.д.). Компьютерная программа может состоять из таких инструкций, сохраненных на машиночитаемом носителе, для выполнения описанных функций
На Фиг. 2 представлена блок-схема примера способа 200, который может быть выполнен одним или несколькими компонентами транспортного средства, представленными на Фиг. 1. Например, различные части процесса 200 могут быть выполнены, например, с помощью пользовательского интерфейса 125, процессора 135 или сочетания этих или других компонентов транспортного средства. В процессе 200 с Фиг. 2 процессор 135 может использовать пользовательский выбор прицепа 105, присоединенного в настоящий момент к транспортному средству 100.
На этапе 205 процессор 135 может обнаруживать наличие прицепа 105, соединенного с транспортным средством 100. Процессор 135 может рассматривать прием сигнала изображения от камеры 120 как признак наличия прицепа 105. Как было сказано выше, в качестве альтернативы транспортное средство 100 может включать в себя один или несколько датчиков, которые определяют, когда прицеп 105 находится непосредственно за транспортным средством 100 или присоединен к сцепке 110 транспортного средства 100.
На этапе 210 пользовательский интерфейс 125 может отображать изображения известных прицепов пользователю. Пользовательский интерфейс 125 также может предоставлять информацию об одном или нескольких известных прицепах с одним или несколькими изображениями. Пользовательский интерфейс 125 может отображать изображения известных прицепов с помощью дисплея, который может являться частью сенсорного экрана. Кроме того, как было сказано выше, изображения известных прицепов могут включать в себя набор всех ранее полученных изображений. Также в некоторых возможных вариантах полученное изображение присоединенного в настоящий момент прицепа 105 может быть представлено в виде изображений известных прицепов таким образом, чтобы, например, на этапе 215 пользователь имел возможность выбора правильного прицепа 105 (т.е. прицепа 105, присоединенного в настоящий момент к транспортному средству 100).
На этапе 215 процессор 135 может принять с помощью интерфейса 125 входной сигнал от пользователя, представляющий собой одно из изображений, представленных на этапе 210. В частности, входной сигнал от пользователя может представлять собой прицеп 105, присоединенный в настоящий момент к транспортному средству 100. Поскольку пользователю могут быть представлены изображения известных прицепов, а также полученное изображение присоединенного прицепа 105, вероятность неправильного выбора прицепа 105 пользователем значительно снижается.
На этапе 220 процессор 135 может сопоставлять собранные данные о транспортном средстве с прицепом 105, выбранным на этапе 215. Например, процессор 135 может хранить значение расстояния, пройденного транспортным средством 100 во время буксировки прицепа 105, в базе данных, в которой пройденное расстояние сопоставлено с прицепом 105, выбранным на этапе 215. База данных может храниться на запоминающем устройстве 130. Пройденное расстояние может быть основано на выходном сигнале одометра 115, как было сказано выше.
После этапа 220 процесс 200 может быть завершен.
На Фиг. 3 представлен пример процесса 300, который может быть выполнен, например, процессором 135, для автоматической идентификации прицепа 105, соединенного с транспортным средством 100.
На этапе 305 процессор 135 может обнаруживать наличие прицепа 105, соединенного с транспортным средством 100. Как было сказано выше, транспортное средство 100 может содержать один или несколько датчиков, которые определяют, когда прицеп 105 находится непосредственно за транспортным средством 100 или присоединен к сцепке 110 транспортного средства 100. В результате обнаружения прицепа 105 процессор 135 может выдавать сигнал наличия, указывающий на наличие прицепа 105.
На этапе 310 процессор 135 может принять полученное изображение прицепа 105. Изображение может быть захвачено сразу после обнаружения прицепа 105 на этапе 305. Как было сказано выше, камера 120 может захватывать изображение прицепа 105 после получения сигнала наличия. Сигнал изображения, соответствующий полученному изображению, может быть передан от камеры 120 на процессор 135.
На этапе 315 процессор 135 может идентифицировать прицеп 105 по полученному изображению. Например, процессор 135 может сравнивать полученное изображение с изображениями известных прицепов, хранящимися на запоминающем устройстве 130. Процессор 135 может использовать одну или несколько технологий обработки изображений для сравнения полученного изображения с изображениями известных прицепов, включая идентификацию используемого прицепа 105 на основании сходства полученного изображения и одного из изображений известных прицепов. После использования технологии обработки изображений может быть выдан сигнал, представляющий собой степень сходства полученного изображения и одного или нескольких изображений известных прицепов. Процессор 135 может обнаруживать совпадение, если степень сходства полученного изображения и одного из изображений известных прицепов превышает заранее заданное пороговое значение. В качестве альтернативы или дополнительно процессор 135 может выбирать в качестве выбранного прицепа прицеп 105, представленный на изображении с самой высокой степенью сходства с полученным изображением.
На этапе 320 процессор 135 может принять подтверждение от пользователя о том, что на этапе 315 был выбран правильный прицеп 105. Например, процессор 135 может с помощью интерфейса 125 предлагать пользователю подтвердить, что прицеп 105, идентифицированный на этапе 315, является прицепом 105, присоединенным к транспортному средству 100. Полученное изображение может отображаться на пользовательском интерфейсе 125, чтобы пользователю было проще подтвердить, что был идентифицирован правильный прицеп 105 и чтобы снизить вероятность выбора неправильного прицепа 105.
На этапе 325 процессор 135 может сопоставлять собранные данные о транспортном средстве с прицепом 105, выбор которого был подтвержден на этапе 320. Например, процессор 135 может хранить значение расстояния, пройденного транспортным средством 100 во время буксировки прицепа 105, в базе данных, в которой пройденное расстояние сопоставлено с прицепом 105, выбор которого был подтвержден на этапе 320. База данных может храниться на запоминающем устройстве 130.
После этапа 325 процесс 300 может быть завершен.
На Фиг. 4 представлена блок-схема примера процесса 400, который может быть выполнен, например, процессором 135, если до этого прицеп 105 никогда не присоединялся к транспортному средству 100. В некоторых примерах процесс 400 может быть выполнен в том случае, если пользователь может указать, что прицеп 105 является новым прицепом 105, например, на этапе 210 с Фиг. 2 или на этапе 320 с Фиг. 3. В качестве альтернативы процесс 400 может начинаться в том случае, если процессор 135 не может автоматически идентифицировать прицеп 105 на этапе 315 с Фиг. 3.
На этапе 405 принятия решения процессор 135 может определять, является ли прицеп 105 новым прицепом 105 для транспортного средства 100. Новый прицеп 105 может включать в себя прицеп 105, который ранее никогда не присоединялся к транспортному средству 100. Процессор 135 может определять, является ли прицеп 105 новым прицепом 105 по входному сигналу от пользователя или по тому, что процессор 135 не может найти совпадение между полученным изображением прицепа 105 и любым изображением известных прицепов, хранящимся на запоминающем устройстве 130. Если прицеп 105 является новым прицепом 105, процесс 400 может перейти на этап 410. Если прицеп 105 не является новым прицепом 105, процесс 400 может завершиться и вернуться на этап 215 с Фиг. 2 или на этап 315 с Фиг. 3.
На этапе 410 процессор 135 может отображать полученное изображение пользователю, например, с помощью пользовательского интерфейса 125. Изображение прицепа 105 может быть захвачено камерой 120 при обнаружении наличия прицепа 105 на этапе 205 с Фиг. 2 или на этапе 305 с Фиг. 3. Камера 120 может выдавать сигнал изображения, соответствующий полученному изображению, для процессора 135, при этом после приема этого сигнала процессор 135 может отображать полученное изображение пользователю с помощью интерфейса 125. При одном возможном подходе процессор 135 может считывать полученное изображение с запоминающего устройства 130 вместо приема полученного изображения непосредственно с камеры 120.
На этапе 415 процессор 135 может предлагать пользователю ввести информацию о полученном изображении. Пример информации, которая может быть запрошена, может включать в себя название прицепа 105, идентификатор, например, серийный номер, марку и модель прицепа 105, дату приобретения, данные о техническом обслуживании прицепа 105 и прочую информацию о прицепе 105. Также может быть запрошена другая информация.
На этапе 420 процессор 135 может сохранять полученное изображение и информацию, полученную на этапе 415, на запоминающее устройство 130. При одном возможном подходе полученное изображение может быть сохранено на запоминающее устройство 130 с помощью камеры 120. Другими словами, камера 120 может передавать сигнал изображения непосредственно на запоминающее устройство 130, в этом случае на этапе 410 процессор 135 может получить доступ к полученному изображению, хранящемуся на запоминающем устройстве 130, как было описано выше. Полученное изображение может быть сохранено на запоминающее устройство 130 вместе с другими изображениями известных прицепов.
В отношении описанных в данном документе процессов, систем, способов, эвристических алгоритмов и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, они могут быть выполнены в другой последовательности. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а также некоторые этапы могут быть добавлены или опущены. Другими словами, описания процессов представлены лишь в качестве примера вариантов осуществления изобретения и не рассматриваются как ограничение изобретения.
Таким образом, следует понимать, что описание приведено в целях наглядности, а не ограничения. Многие дополнительные варианты реализации и применения, отличные от показанных примеров, станут очевидны при ознакомлении с вышеприведенным описанием. Объем не должен быть определен на основании приведенного выше описания, но, напротив, должен быть определен на основании прилагаемой формулы изобретения наряду с полным объемом эквивалентов, для которых данная формула является основанием. Предполагается и имеется в виду, что описываемые технологии могут быть развиты и усовершенствованы в будущем, причем раскрытые системы и способы будут включены в подобные будущие варианты реализации. Таким образом, следует понимать, что применение изобретения может быть изменено и модифицировано.
Все термины, применяемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в данной области техники, если иное явно не указано в описании изобретения. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле не указано иное.
Система сидений с багажной полкой
Определение экономного маршрута транспортного средства
Способ управления двигателем (варианты)
Передний модуль для автомобиля
Поиск и выявление объектов инфраструктуры и прокладка маршрута
Способ поэтапного формования детали с вогнутыми и выпуклыми поверхностями
Система кондиционирования с одним расширительным клапаном
Система для перевозки грузов
Система и способ автоматического хранения и извлечения информации о чрезвычайной ситуации
Транспортное средство с системой идентификации
Система и способ контроля соединения транспортного средства с прицепом
Способ и система для контроля размещения метки на прицепе транспортного средства
Система и способ помощи водителю транспортного средства с прицепом
Система помощи при движении задним ходом с прицепом в транспортном средстве
Система адаптивного круиз-контроля транспортного средства
Система помощи при движении задним ходом с прицепом
Система защиты каталитического нейтрализатора
Система защиты каталитического нейтрализатора
Способ оценки расстояния от оси прицепа до дышла и система для его осуществления
Способ и устройство для определения интенсивности движения с помощью электронного контроллера, установленного в транспортном средстве

