Результат интеллектуальной деятельности: Способ автоматизированного оповещения водителей транспортных средств на особо опасных участках дороги
Вид РИД
Изобретение
Изобретение относится к технике управления дорожными транспортными средствами и касается обеспечения безопасности движения транспортных средств.
В настоящее время безопасность движения транспортных средств обеспечивается, как правило, визуально водителем из расчета, что он обязан самостоятельно оценить ситуацию перед автомобилем и обеспечить такой выбор параметров движения (скорость), при которых исключается столкновение с другим транспортным средством, препятствием или пешеходом. Однако это сопряжено с неудобством и неправильной оценкой дорожной ситуации. В частности, на особо опасных участках дорог с разрешённым обгоном практически всегда достаточно сложно объективно оценить дорожную ситуацию ввиду следующих факторов: высокой скорости попутного потока, больших габаритных размеров впереди идущих транспортных средств, затрудняющих оценку дорожной ситуации, некорректной оценки скорости встречного потока, рельефных особенностей трассы, препятствующих получению необходимой информации о расстоянии между потоками для обгона.
Для качественной оценки дорожной ситуации перед автомобилем получили распространение автоматизированные средства по предупреждению водителя, а также корректированию движения автомобиля в случаях изменения параметров движения движущегося впереди транспортного средства. Такие средства обычно основаны на использовании лазерных радаров, с помощью которых определяется расстояние до движущегося впереди транспортного средства и его скорость, а также на сопоставлении последней со скоростью преследующего транспортного средства (DE 102005008715 A1, G01S 13/93, 31.08.2006; US 2007/0146684 A1, G01C 3/08, 28.06.2007). Известные средства данного назначения имеют ограниченную область практического применения, охватывающую лишь контроль фронтально расположенного или движущегося препятствия.
Наиболее близким по технической сущности является: «Способ предупреждения столкновения транспортного средства с объектом, перемещающимся в переднебоковой зоне транспортного средства в направлении, пересекающем направления движения транспортного средства». Вышеуказанный способ направлен на обеспечение эффективного контроля за перемещением объектов в переднебоковой зоне, если направление этого перемещения пересекает траекторию движения транспортного средства. Достигаемый при этом технический результат заключается в повышении безопасности движения за счет обеспечения превентивного оповещения водителя о возникающем в переднебоковой зоне движущемся препятствии и соответствующего управления параметрами движения транспортным средством (МПК: B60W 30/08; №2402445 – прототип).
Недостатком рассмотренного выше способа является то, что он не в полной мере позволяет решить задачу предполагаемого изобретения, заключающуюся в обеспечении гарантированного обгона транспортным средством впереди идущего потока за счёт предоставления информации водителю о возможности/невозможности совершения обгонного манёвра на особо опасных участках дорог. Рассмотренный выше способ направлен на повышение общей безопасности дорожного движения, но не решает задачи предлагаемого изобретения, поскольку имеет принципиально иной алгоритм функционирования. Представленные способы позволяют определить расстояние до встречного потока и его скорость при помощи видеокамер, лазерных лучей, радаров и довести полученную информацию до водителя. Недостатком всех перечисленных способов является то, что они реализуются путём привязки к транспортному средству.
Отличительной особенностью предлагаемого изобретения является автономность его функционирования от транспортного средства. Данная автономность достигается отсутствием необходимости установки дополнительных механизмов, устройств, элементов, работающих по принципу считывания (чипов) непосредственно на транспортном средстве.
Задачей предлагаемого способа автоматизированного оповещения водителей транспортных средств является обеспечение возможности гарантированного обгона транспортным средством впереди идущего потока. Достигаемый при этом технический результат заключается в повышении безопасности движения за счет оповещения водителя о возможности/невозможности совершения обгонного манёвра.
Предлагаемый способ реализует функцию оповещения водителей посредством световой индикации на всём протяжении особо опасного участка с разрешённым обгоном. Световая индикация является средством предупреждения водителей о возможности безопасного обгона или предостережения от совершения данного манёвра.
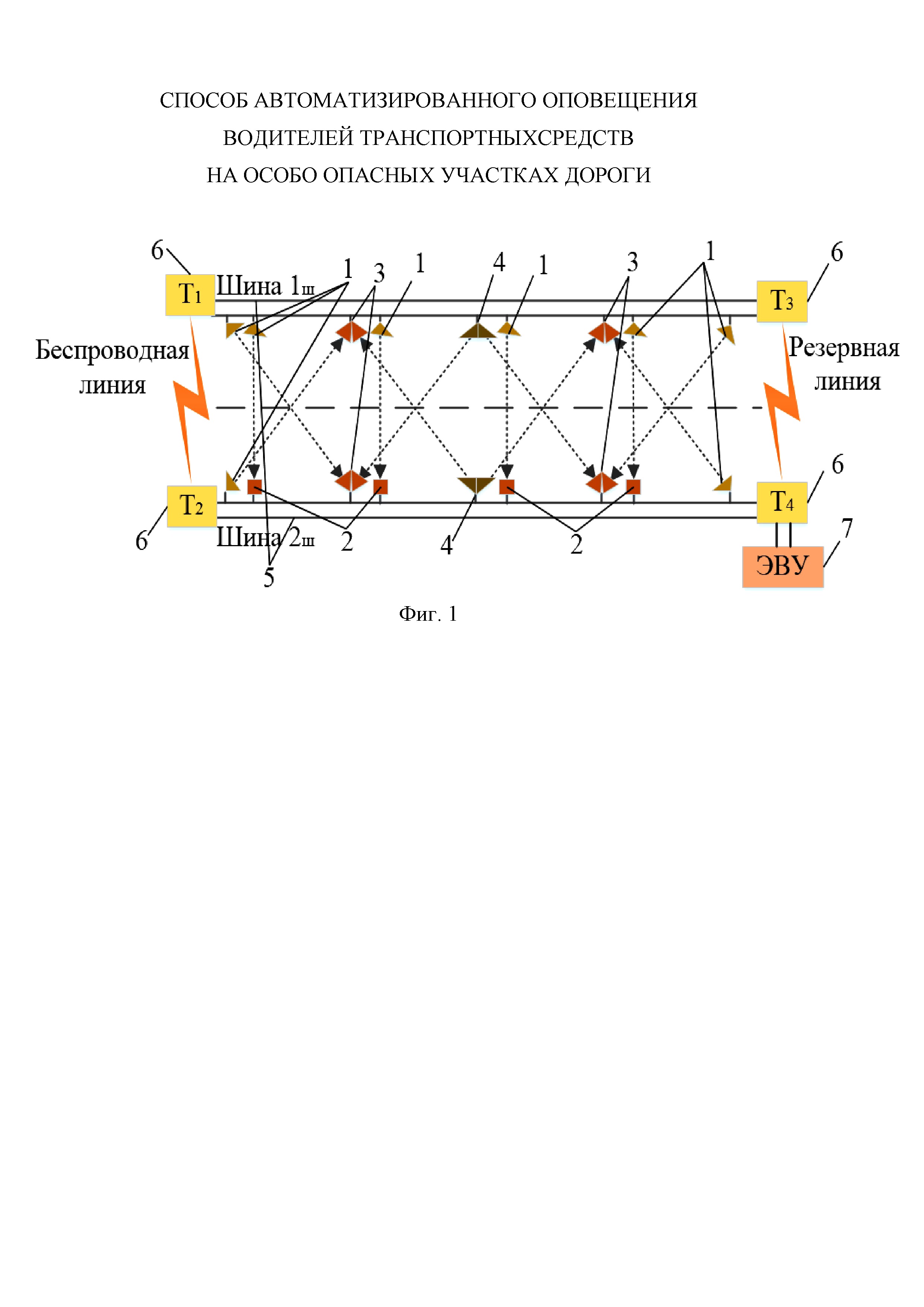
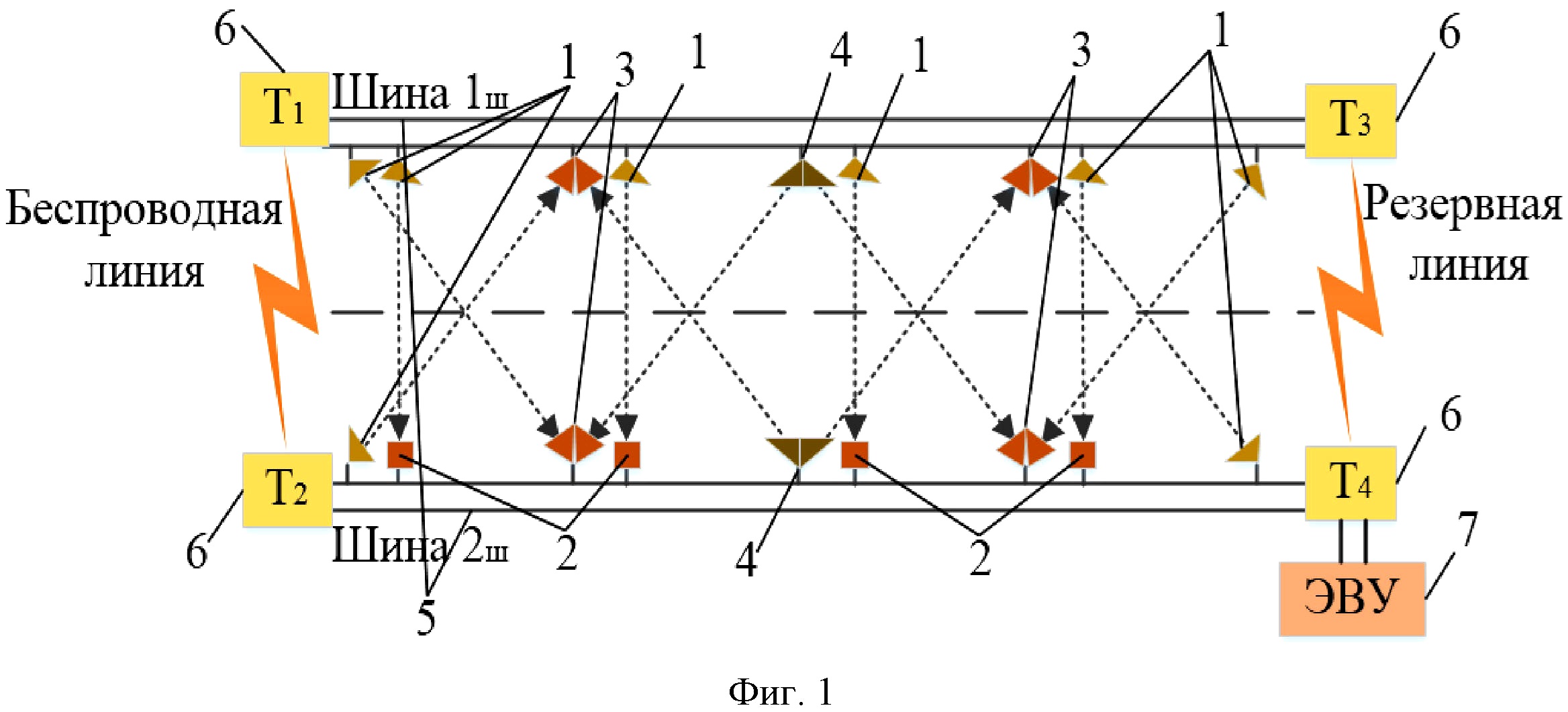
На фиг. 1 изображена реализация способа автоматизированного оповещения водителей транспортных средств на особо опасных участках дороги.
На фигуре 1:
1 – датчик генерирования инфракрасного излучения, луч света которого направлен перпендикулярно направлению дорожного движения (тип 1).
2 – датчик приёма и инфракрасного излучения от датчика 1 (тип 2).
3 – датчик генерирования инфракрасного излучения, луч света которого направлен под определённым углом к направлению дорожного движения (тип 3).
4 – датчик приёма и инфракрасного излучения от датчика 3 (тип 4).
5 – Шина 1ш и Шина 2ш – Шины передачи данных.
6 – Т1, Т2, Т3, Т4 – Беспроводные устройства, за счёт которых организуется беспроводная и резервная линия, позволяющая осуществлять обмен данными между шинами.
7 – ЭВУ – Электронно-вычислительное устройство, представляет собой аппаратно-программный контроллер, позволяющий принимать и обрабатывать данные с датчиков всех типов, в соответствии с определённым программным алгоритмом, на основе которого осуществляется управление работой световой индикацией.
На обочинах дороги, перпендикулярно направлению движения устанавливаются два типа датчиков: устройство генерирования 1 (тип 1) и приёма 2 (тип 2) инфракрасного излучения для обнаружения транспортного средства на дорожном полотне, а также его скорости.
Определение местоположения транспортного средства по отношению к общей ширине дорожного полотна достигается путём установки датчиков типа 3, 4 по обеим сторонам дороги на основе их особенного геометрического расположения. Датчики типа 3, 4, геометрически расположены так, что два соседних датчика 3 (тип 3) являются основанием мнимого равнобедренного треугольника, а датчик 4 (тип 4) его вершиной.
Реализация способа заключается в работе совокупности перечисленных элементов, позволяющих решить следующее:
- определить скорости транспортных средств, въезжающих в зону опасного участка дорожного движения, с разрешённым обгоном;
- отслеживать транспортные средства на всём анализируемом отрезке пути, посредством присвоения идентификационных номеров каждому транспортному средству, въезжающему на опасный участок дороги;
- определять местоположение транспортного средства на дорожном полотне.
Способ автоматизированного оповещения водителей транспортных средств на особо опасных участках дорог осуществляется следующим образом.
Определяются скорости транспортных средств. На обочинах дороги, перпендикулярно направлению движения устанавливаются два типа датчиков: устройство генерирования 1 (тип 1) и приёма 2 (тип 2) инфракрасного излучения, позволяющие получать сведения о моменте времени прерывания луча. Для определения скорости движения транспортного средства достаточно две пары таких устройств, установленных на определённом, заранее известном, расстоянии друг от друга. На основании последовательного прерывания двух лучей каждой из таких пар электронно-вычислительным устройством (ЭВУ) 7 рассчитывается интервал времени между прерываниями, что в совокупности с известным расстоянием между парами датчиков 1,2 (тип 1, 2) позволяет рассчитать скорость движения транспортного средства и определить его направление движения.
При въезде транспортного средства на контролируемый участок дорожного движения и при пересечении им луча инфракрасного диапазона, формируемого датчиком 1 (тип 1), информация о пересечении передаётся по шинам передачи данных (Шина 1ш и Шина 2ш, 5) на ЭВУ 7, где происходит присвоение идентификационного номера каждому транспортному средству, который сохраняется за ним на всём протяжении контролируемого участка дорожного полотна. При остановке транспортного средства информация о его местоположении сохраняется в ЭВУ 7. После того как транспортное средство покидает контролируемый участок дороги, его номер удаляется из ЭВУ 7.
Определение местоположения транспортного средства по отношению к общей ширине дорожного полотна достигается путём установки датчиков (1, 2, 3, 4) по обеим сторонам дороги и их особенным геометрическим расположением. Датчик 3 (тип 3) представляет собой устройство генерирования инфракрасного излучения, датчик 4 (тип 4) представляет собой устройство приёма инфракрасного излучения, позволяющее получать сведения о моменте времени прерывания луча.
От пары датчиков 1, 2 (тип 1, 2), расположенных перпендикулярно направлению движения и датчиков 3, 4 (тип 3,4), геометрически расположенных так, что пара датчиков 3 (тип 3) являются основанием мнимого равнобедренного треугольника, а датчик 4 (тип 4) его вершиной. Определяется время пересечения транспортным средством двух лучей:
t1 – между парами датчиков 1, 2 (тип 1, 2);
t2 – между сторонами мнимого равнобедренного треугольника, образуемого вершиной 4 (тип 4) и двумя датчиками 3 (тип 3).
По совокупности расположения всех типов датчиков в системе задаётся коэффициент условия выезда (k) на полосу встречного движения. Транспортное средство движется по своей полосе, если  , и по встречной, если
, и по встречной, если  .
.
Сведения с датчиков всех типов на обеих обочинах дороги передаются в виде данных на ЭВУ, 7 по (Шине 1ш и Шине 2ш, 5) и беспроводным устройствам 6 (фиг. 1).
На основании данных, поступивших в ЭВУ 7, происходит идентификация каждого транспортного средства, въезжающего на опасный участок дороги, и анализируется возможность обгона им впереди идущего потока.
На основании информации о допустимом расстоянии до транспортного средства, о радиусе завершения обгона для определённых датчиками скоростей 1,2 (тип 1,2), о скорости движения встречного потока, предлагаемое изобретение производит анализ возможности обгона транспортным средством впереди идущего потока.
В основу предлагаемого способа положено, что скорость обгоняющего транспортного средства должна увеличиться по сравнению со скоростью впереди идущего потока на определённую величину. Данное обстоятельство позволит гарантированно совершить безопасный обгонный манёвр. Принимается решение, результатам которого является работа световой индикации, информирующей участников дорожного движения о возможности/невозможности совершения запланированного манёвра.
Работа световой индикации осуществляется следующим образом. При выезде транспортного средства на полосу встречного движения в ЭВУ 7 производится анализ: скоростей транспортных средств обгоняемого и встречного потоков, расстояния между ними (времени сближения), длины обгоняемого потока, безопасного расстояния, необходимого для завершения манёвра, времени, затрачиваемого на обгон потока при условии соблюдения вышеуказанного скоростного режима. На основании результатов произведенного анализа в ЭВУ 7 принимается решение о возможности или невозможности осуществления безопасного обгона на контролируемом участке дороги. При этом, если обгон транспортным средством возможен, и оно первое выехало на встречную полосу в отличие от автомобилей противоположного потока, тогда в ЭВУ 7 принимается решение о включении у противоположного потока предупреждающих огней световой индикации, таким образом исключается возможность возникновения двустороннего обгона. Световая индикация загорается и гаснет в соответствии с движением транспортных средств. При следовании указаниям световой индикации аварийной ситуации не возникнет.
Если автомобиль выехал на полосу встречного движения и ЭВУ 7 выдало решение, на основании которого обгон может привести к ДТП, работа световой индикации строится следующим образом: в ЭВУ 7 принимается решение, следствием которого является мигание сигнализирующих элементов световой индикации, в результате чего происходит предупреждение водителя о невозможности совершить обгонный манёвр. Данный процесс продолжается до момента возвращения транспортного средства в свою полосу движения.
Если встречные потоки находятся на критическом расстоянии друг от друга, при котором обгон невозможен, в ЭВУ 7 принимается решение, результатом которого является следующая работа световой индикации: информирующая световая индикация, расположенная по краям дороги и проецируемая на дорожную разметку, загорается красным цветом и гаснет после расхождения потоков. Данное решение позволяет исключить выезд транспортного средства на полосу встречного движения, как с одной, так и с другой стороны, тем самым исключив возможность возникновения ДТП. Такой алгоритм работы световой индикации определяется из условия, при котором транспортное средство не сможет совершить обгон ни при каких условиях.
При условии остановки транспортного средства информация о его местоположении заносится в буфер ЭВУ 7 и сохраняется до момента возобновления движения транспортным средством, после чего его местоположение будет обновляться.
Способ токарной обработки профильного вала с раздельным съемом припуска при формообразовании его конической части
Способ получения заготовок из порошковой быстрорежущей стали
Устройство для гранулирования удобрений
Форсунка для горелки
Мультитеплотрубная паротурбинная установка с капиллярным конденсатором
Способ получения формиата цинка
Способ получения пектина из растительного сырья
Кожухотрубный капиллярный конденсатор
Ползающий мобильный робот
Мостовой измеритель параметров двухполюсников
Ингибиторы поли(адф-рибозо)полимеразы-1 человека на основе производных урацила
Миметики поли (adp-рибозы) и способ их получения
Способ формирования антиобледенительного покрытия на неизолированном проводе воздушной линии электропередачи
Гидройодная соль 7-метил-2'-дезоксигуанозина в качестве субстрата для получения 2'-дезоксинуклеозидов методом ферментативного трансгликозилирования
Способ автоматизированного определения и контроля местоположения транспортного средства на дорожном полотне с двусторонним однополосным движением
Способ получения соли α-d-рибофуранозо-1-фосфата или α-d-2-дезоксирибофуранозо-1-фосфата
Матричное устройство параллельного поиска составного образца

