Результат интеллектуальной деятельности: ПОЛЗАЮЩИЙ МОБИЛЬНЫЙ РОБОТ
Вид РИД
Изобретение
Изобретение относится к робототехнике и может найти применение в отраслях деятельности, связанных с риском для здоровья или жизни человека, в агрессивных средах, где необходимо применение многофункциональных, дистанционно управляемых робототехнических мобильных устройств.
Наиболее близким к предлагаемому техническому решению является ползающий робот-змея, отличающийся тем, что три звена робота соединены при помощи двух сферических шарниров с закрепленными на сферических шарнирах двумя линейными электроприводами, которые представляют собой реверсивные двигатели постоянного тока с реечной передачей, причем звенья имеют вид плоских крестообразных пластин с установленными на их концах опорами из вязкоупругого материала (см. патент РФ №67541 от 08.05.2007 г.).
Недостатком данной конструкции является то, что в качестве движителей используются линейные электроприводы, ограничивающие диапазон вращения звеньев, что приводит к недостаточной подвижности и невысокой маневренности робота. Перемещение корпуса происходит за счет создания постоянной неуправляемой силы трения скольжения между вязкоупругими элементами на концах звеньев и опорной поверхностью, что можно считать нерациональным для обеспечения высоких скоростных характеристик при движении робота по скользкой поверхности.
Задача изобретения - обеспечение высоких скоростных характеристик, а также высокой проходимости робота при движении по скользкой поверхности.
Поставленная задача достигается тем, что в ползающем мобильном роботе, состоящем из трех звеньев, соединенных между собой шарнирами и приводимых в движение относительно друг друга при помощи двух электроприводов, и имеющем закрепленные на концах звеньев опорные элементы, в качестве электроприводов используются мотор-редукторы вращательного движения, а опорные элементы представлены двумя типами - активными и пассивными, причем активные контактные элементы состоят из корпуса, электромагнитного привода и металлического сердечника с закрепленным на нем острием из фрикционного материала, а пассивные контактные элементы состоят из корпуса и свободно вращающегося относительно двух осей сферического шарнира.
Сравнение заявляемого технического решения с прототипом показывает, что оно отличается от прототипа тем, что в качестве электроприводов используются вращательные мотор-редукторы, приводящие в движение крайние звенья робота, а в качестве опорных элементов - активные и пассивные контактные элементы, причем активные контактные элементы состоят из корпуса, электромагнитного привода и металлического сердечника с острием из фрикционного материала, а пассивные контактные элементы состоят из корпуса и свободно вращающегося относительно двух осей сферического шарнира. Это соответствует критерию изобретения “новизна”.
Признаки, отличающие заявляемое техническое решение от прототипа, не выявлены в других технических решениях при изучении данной и смежных областей техники, что соответствует критерию изобретения “технический уровень”.
Совокупность заявляемых признаков обеспечивает достижение задачи изобретения - обеспечение высоких скоростных характеристик и высокой проходимости мобильного робота при движении по скользкой поверхности.
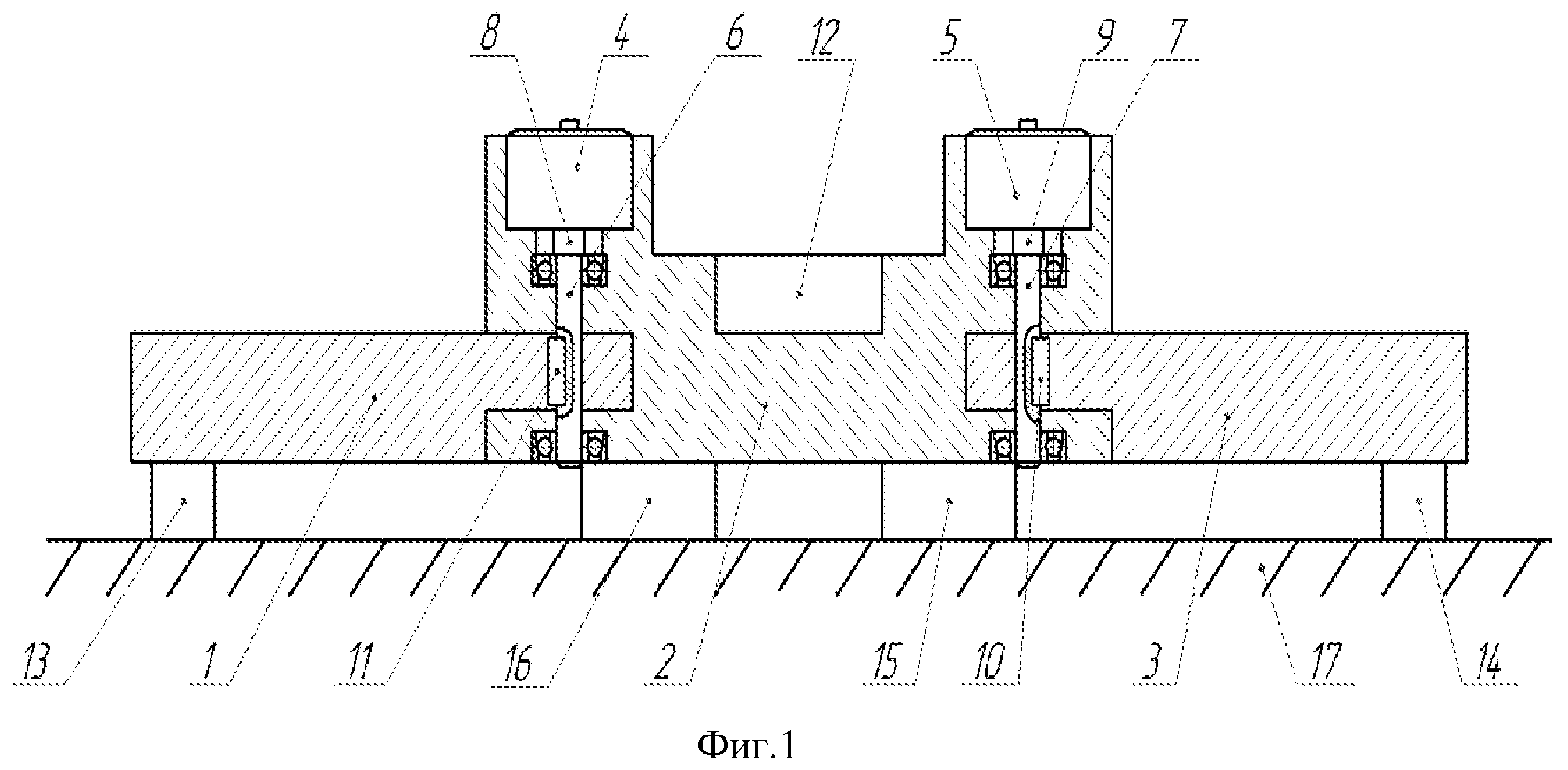
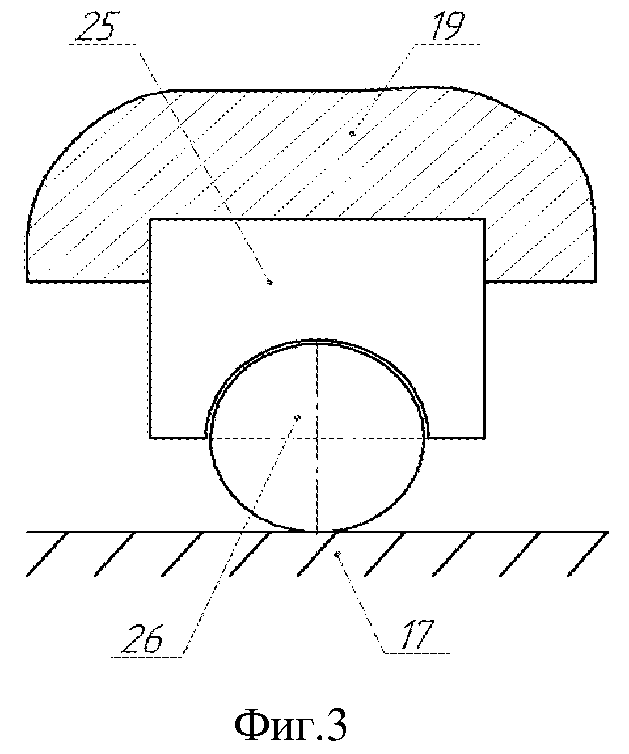
На фиг. 1 показан общий вид предлагаемого устройства, на фиг. 2 - устройство активного контактного элемента, на фиг. 3 - устройство пассивного контактного элемента.
Конструкция робота состоит из трех звеньев 1, 2 и 3, приводимых в движение относительно друг друга при помощи мотор-редукторов 4 и 5, крутящие моменты с которых передаются на валы 6 и 7 посредством применения муфт 8 и 9, причем валы могут быть соединены с крайними звеньями различными видами соединений (в данном случае показано соединение шпонками 10 и 11), блока электроники 12 и контактных элементов 13, 14, 15 и 16. Реализация различных типов походки робота осуществляется при помощи блока электроники 12.
Активные контактные элементы состоят из корпуса 18, жестко соединенного с нижней частью 19 центрального звена трехзвенного робота, электромагнитных приводов 20, металлического сердечника 21 с закрепленным на нем острием 22 из фрикционного материала и пружин сжатия 23 и 24.
Пассивные контактные элементы состоят из корпуса 25, жестко соединенного с нижней частью 19 крайних звеньев робота, и сферического шарнира 26, свободно вращающегося относительно трех осей, обеспечивающего свободное скольжение контактного элемента по поверхности движения 17.
Устройство работает следующим образом. Блок электроники 12, расположенный на центральном звене 1, в соответствии с алгоритмом походки трехзвенного робота подает электропитание на обмотки мотор-редукторов 4 и 5, отвечающих за вращение звеньев 1, 2 и 3 относительно друг друга, и на контактные элементы 15 и 16, которые оснащены электромагнитными приводами 20. Таким образом, меняя характер взаимодействия робота с шероховатой поверхностью, получаем, что силы трения между контактными элементами 15 и 16 и опорной поверхностью являются управляемыми переменными величинами (активные контактные элементы). Элементы 13 и 14 не являются управляемыми и всегда обеспечивают постоянный коэффициент силы трения (пассивные контактные элементы).
В моменты, когда на обмотку электромагнитного привода 20 подается напряжение, внутри него индуцируется магнитный поток, направленный перпендикулярно поверхности движения 17 робота, заставляющий сердечник 21 устремиться вниз, а острие 22 - «вцепиться» в плоскость движения, и таким образом, значительно увеличить коэффициент силы трения скольжения.
Использование подобной конструкции ползающего робота обеспечит его большую гибкость при изменении собственной конфигурации, что позволит отрабатывать различные сложные типы походки трехзвенника, а также улучшение проходимости робота при работе в средах с различными типами грунта.
Ползающий мобильный робот, состоящий из трех звеньев, соединенных между собой шарнирами и приводимых в движение относительно друг друга при помощи двух электроприводов, и имеющий закрепленные на концах звеньев опорные элементы, отличающийся тем, что в качестве электроприводов используются мотор-редукторы вращательного движения, а опорные элементы представлены двумя типами - активными и пассивными, причем активные контактные элементы состоят из корпуса, электромагнитного привода и металлического сердечника с закрепленным на нем острием из фрикционного материала, а пассивные контактные элементы состоят из корпуса и свободно вращающегося относительно двух осей сферического шарнира.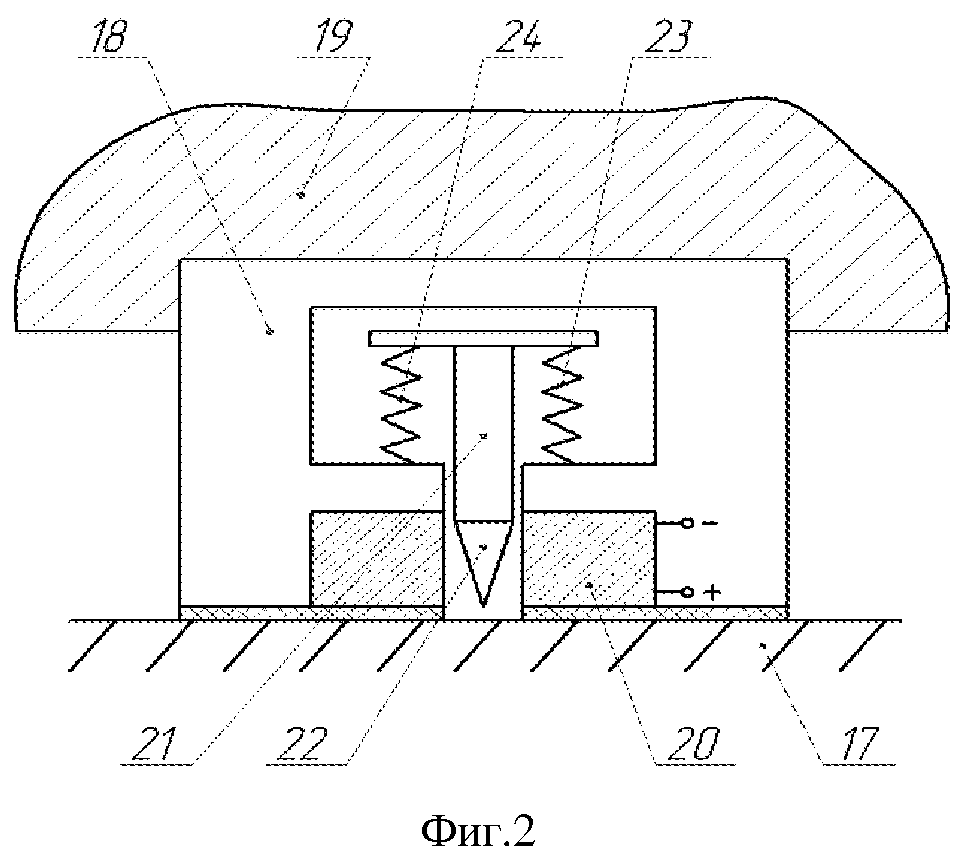
Способ для набора петель трикотажного полотна и устройство для его осуществления
Способ токарной обработки профильного вала с раздельным съемом припуска при формообразовании его конической части
Способ получения заготовок из порошковой быстрорежущей стали
Устройство для гранулирования удобрений
Форсунка для горелки
Мультитеплотрубная паротурбинная установка с капиллярным конденсатором
Способ получения формиата цинка
Способ получения пектина из растительного сырья
Кожухотрубный капиллярный конденсатор
Мостовой измеритель параметров двухполюсников
Способ для набора петель трикотажного полотна и устройство для его осуществления
Способ токарной обработки профильного вала с раздельным съемом припуска при формообразовании его конической части
Способ получения заготовок из порошковой быстрорежущей стали
Устройство для гранулирования удобрений
Форсунка для горелки
Мультитеплотрубная паротурбинная установка с капиллярным конденсатором
Способ получения формиата цинка
Способ получения пектина из растительного сырья
Кожухотрубный капиллярный конденсатор
Мостовой измеритель параметров двухполюсников

