Результат интеллектуальной деятельности: Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Вид РИД
Изобретение
Предлагаемое изобретение относится к области вторичной цифровой обработки радиолокационных сигналов и может быть использовано в радиолокационной станции (РЛС) для формирования при сопровождении воздушной цели (ВЦ)) из класса «самолет с турбореактивным двигателем (ТРД)» достоверной оценки радиальных функционально-связанных координат взаимного перемещения ВЦ и носителя РЛС при воздействии уводящих по дальности и скорости помех.
Известен способ сопровождения воздушной цели на основе процедуры оптимальной многомерной линейной дискретной калмановской фильтрации в соответствии с уравнениями [1]






где
k=0,1,…, К, …, - номер такта работы фильтра;
P-(k+1) и P(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно;
Ф(k) - переходная матрица состояния;
Q(k+1) и R(k+1) - ковариационные матрицы шумов возбуждения и наблюдения соответственно;
S(k+1) - матрица весовых коэффициентов;
I - единичная матрица;
 и
и  - вектор текущих и экстраполированных оценок радиальных функционально-связанных координат взаимного перемещения носителя РЛС и воздушной цели;
- вектор текущих и экстраполированных оценок радиальных функционально-связанных координат взаимного перемещения носителя РЛС и воздушной цели;
H(k+1) - матрица наблюдения;
Y(k) - вектор наблюдения;
Z(k+1) - матрица невязок измерения;
Ψ(k+1) - матрица априорных ошибок фильтрации;
«-1» - операция вычисления обратной матрицы;
«т» - операция транспонирования матрицы.
Недостатком данного способа сопровождения воздушной цели является низкая достоверность оценок радиальных функционально-связанных дальности до воздушной цели и скорости сближения носителя РЛС с нею при воздействии уводящих по скорости и дальности помех.
Известен способ сопровождения в радиолокационной станции воздушной цели из класса «самолет с турбореактивным двигателем» при воздействии уводящей по скорости помехи, заключающийся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой воздушной цели и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) ее силовой установки, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера воздушной цели и поступает на вход оптимального фильтра сопровождения воздушной цели, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации (1)-(6), определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера воздушной цели, который поступает на вход оптимального фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от лопаток рабочего колеса первой ступени КНД и функционирующего в соответствии с процедурой (1)-(6), определяется оценка разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки воздушной цели, которая при отсутствии воздействия уводящей по скорости помехи является величиной постоянной, вычисляется модуль производной оценки разности
КНД силовой установки воздушной цели, которая при отсутствии воздействия уводящей по скорости помехи является величиной постоянной, вычисляется модуль производной оценки разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки воздушной цели, которая сравнивается с пороговым значением ε, близким к нулю, выполнение условия
КНД силовой установки воздушной цели, которая сравнивается с пороговым значением ε, близким к нулю, выполнение условия

свидетельствует об отсутствии воздействия уводящей по скорости помехи и оценка  формируется в соответствии с процедурой (1)-(6) на основе наблюдения и динамической модели радиальных функционально-связанных координат взаимного перемещения ВЦ и носителя РЛС, невыполнение условия (7) свидетельствует о воздействии уводящей по скорости помехи и оценка
формируется в соответствии с процедурой (1)-(6) на основе наблюдения и динамической модели радиальных функционально-связанных координат взаимного перемещения ВЦ и носителя РЛС, невыполнение условия (7) свидетельствует о воздействии уводящей по скорости помехи и оценка  вычисляется без наблюдения и только на основе динамической модели радиальных функционально-связанных координат взаимного перемещения ВЦ и носителя РЛС [2].
вычисляется без наблюдения и только на основе динамической модели радиальных функционально-связанных координат взаимного перемещения ВЦ и носителя РЛС [2].
Недостатком данного способа сопровождения воздушной цели является низкая достоверность оценок радиальных функционально-связанных дальности до воздушной цели и скорости сближения носителя РЛС с нею при воздействии совместно или раздельно уводящих по скорости и дальности помех.
Цель изобретения - повышение достоверности оценок радиальных функционально-связанных дальности до воздушной цели и скорости сближения носителя РЛС с нею при воздействии совместно или раздельно уводящих по скорости и дальности помех.
Для достижения цели в способе сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящей по скорости помехи, заключающимся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой воздушной цели и вращающихся лопаток рабочего колеса КНД ее силовой установки, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера воздушной цели и поступает на вход оптимального фильтра сопровождения воздушной цели, функционирующего в соответствии с процедурой (1)-(6) оптимальной многомерной линейной дискретной калмановской фильтрации, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера воздушной цели, который поступает на вход оптимального фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от лопаток рабочего колеса первой ступени КНД и функционирующего в соответствии с процедурой (1)-(6), определяется оценка разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки воздушной цели, вычисляется модуль производной оценки разности
КНД силовой установки воздушной цели, вычисляется модуль производной оценки разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки воздушной цели, которая сравнивается с пороговым значением 8, близким к нулю, выполнение или невыполнение условия (7) свидетельствует соответственно об отсутствии или воздействии уводящей по скорости помехи, дополнительно измеряется дальность до воздушной цели, в соответствии с процедурой (1-6) осуществляется формирование оценки дальности
КНД силовой установки воздушной цели, которая сравнивается с пороговым значением 8, близким к нулю, выполнение или невыполнение условия (7) свидетельствует соответственно об отсутствии или воздействии уводящей по скорости помехи, дополнительно измеряется дальность до воздушной цели, в соответствии с процедурой (1-6) осуществляется формирование оценки дальности  , вычисляется производная оценки дальности
, вычисляется производная оценки дальности  , вычисляется дальность
, вычисляется дальность  на основе динамической модели радиальных функционально-связанных координат взаимного перемещения носителя РЛС и воздушной цели вида
на основе динамической модели радиальных функционально-связанных координат взаимного перемещения носителя РЛС и воздушной цели вида
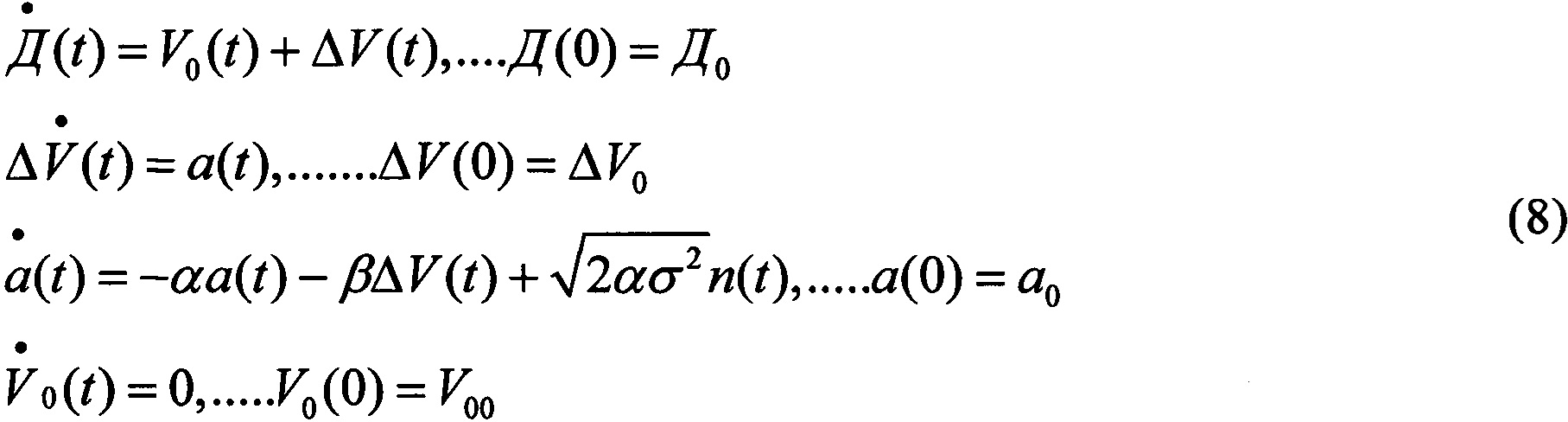
где
Д(t), V(t)=V0(t)+ΔV(t) и a(t) - радиальные функционально-связанные координаты соответственно дальность, скорость и ускорение сближения носителя РЛС с воздушной целью;
V0(t) и ΔV(t) - соответственно детерминированная и флюктуационная составляющие скорости сближения носителя РЛС с воздушной целью;
α - величина, обратная времени корреляции скоростных флюктуаций взаимного перемещения носителя РЛС и воздушной цели;
β - квадрат собственной частоты скоростных флюктуаций взаимного перемещения носителя РЛС и воздушной цели;
σ - среднеквадратическое отклонение флюктуаций ускорения взаимного перемещения носителя РЛС и воздушной цели;
n(t) - формирующий белый гауссовский шум с нулевым математическим ожиданием и единичной интенсивностью,
представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), размерностями 4×4, ненулевыми элементами которых являются соответственно ϕ1,1=ϕ2,1=ϕ4,4=1; ϕ1,2=ϕ1,4=ϕ2,3=T; ϕ3,2=-βТ; ϕ3,3=1-αT; и q3,3=2αТσ2, где Т - период дискретизации, вычисляется модуль разности между оценкой производной дальности  и оценкой скорости
и оценкой скорости  , величина которого сравнивается с порогом ε1,
, величина которого сравнивается с порогом ε1,

где  - оценка скорости, сформированная на основе измерения скорости Y(k+1)=[V(k+1)]T и динамической модели радиальных функционально-связанных координат вида
- оценка скорости, сформированная на основе измерения скорости Y(k+1)=[V(k+1)]T и динамической модели радиальных функционально-связанных координат вида
 представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), размерностями 3×3, ненулевыми элементами которых являются соответственно ϕ1,1=ϕ3,3=1; ϕ1,2=Т; ϕ2,1=-βT; ϕ2,2=1-αT; и q2,2=2αTσ2, вычисляется модуль разности между оценкой дальности
представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), размерностями 3×3, ненулевыми элементами которых являются соответственно ϕ1,1=ϕ3,3=1; ϕ1,2=Т; ϕ2,1=-βT; ϕ2,2=1-αT; и q2,2=2αTσ2, вычисляется модуль разности между оценкой дальности  и вычисленной дальностью
и вычисленной дальностью  на основе динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), величина которого сравнивается с порогом ε2,
на основе динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), величина которого сравнивается с порогом ε2,

одновременное выполнение условий (7) и (9) свидетельствует об отсутствии уводящих по скорости и дальности помех, в этом случае оценки дальности  и скорости
и скорости  формируются в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[Д(k+1), V(k+1)]T и динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), одновременное выполнение условия (7) и невыполнение условия (9) свидетельствует о воздействии только уводящей по дальности помехи, в этом случае оценка скорости
формируются в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[Д(k+1), V(k+1)]T и динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), одновременное выполнение условия (7) и невыполнение условия (9) свидетельствует о воздействии только уводящей по дальности помехи, в этом случае оценка скорости  формируется в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[V(k+1)] и динамической модели радиальных функционально-связанных координат (10), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), а оценка дальности
формируется в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[V(k+1)] и динамической модели радиальных функционально-связанных координат (10), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), а оценка дальности  вычисляется без учета измерения дальности путем интегрирования оценки скорости
вычисляется без учета измерения дальности путем интегрирования оценки скорости  , одновременное невыполнение условия (7) и выполнение условия (9) свидетельствует о воздействии уводящих по дальности и скорости помех с функционально-связанным законом увода, в этом случае оценки дальности
, одновременное невыполнение условия (7) и выполнение условия (9) свидетельствует о воздействии уводящих по дальности и скорости помех с функционально-связанным законом увода, в этом случае оценки дальности  и скорости
и скорости  вычисляются в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), одновременное невыполнение условий (7) и (11) свидетельствует о воздействии уводящих по дальности и скорости помех без функционально-связанного закона увода, в этом случае оценки дальности
вычисляются в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), одновременное невыполнение условий (7) и (11) свидетельствует о воздействии уводящих по дальности и скорости помех без функционально-связанного закона увода, в этом случае оценки дальности  и скорости
и скорости  также вычисляются в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), одновременное невыполнение условия (7) и выполнение условия (11) свидетельствует о воздействии только уводящей по скорости помехи, в этом случае оценки дальности
также вычисляются в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), одновременное невыполнение условия (7) и выполнение условия (11) свидетельствует о воздействии только уводящей по скорости помехи, в этом случае оценки дальности  и скорости
и скорости  формируются в соответствии с процедурой (1)-(6) на основе измерения только дальности Y(k+1)=[Д(k+1)] и динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1).
формируются в соответствии с процедурой (1)-(6) на основе измерения только дальности Y(k+1)=[Д(k+1)] и динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1).
Новыми признаками, обладающими существенными отличиями, являются:
1. Идентификация отсутствия воздействия уводящих по скорости и дальности помех при одновременном выполнении условий (7) и (9) и формирование оценок дальности  и скорости
и скорости  в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[Д(k+1), V(k+1)]T и динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1).
в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[Д(k+1), V(k+1)]T и динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1).
2. Идентификация воздействия только уводящей по дальности помехи при одновременном выполнении условия (7) и невыполнении условия (9) и формирование оценки скорости  в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[V(k+1)] и динамической модели радиальных функционально-связанных координат (10), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), а оценки дальности
в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[V(k+1)] и динамической модели радиальных функционально-связанных координат (10), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1), а оценки дальности  вычисляется без учета измерения дальности и на основе интегрирования оценки скорости
вычисляется без учета измерения дальности и на основе интегрирования оценки скорости  .
.
3. Идентификация воздействия уводящих по дальности и скорости помех с функционально-связанным законом увода при одновременном невыполнении условия (7) и выполнении условия (9) и вычисление оценок дальности  и скорости
и скорости  в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1).
в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1).
4. Идентификация воздействия уводящих по дальности и скорости помех без функционально-связанного закона увода при одновременном невыполнении условий (7) и (11) и вычисление оценок дальности  и скорости
и скорости  в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1).
в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1).
5. Идентификация воздействия только уводящей по скорости помехи при одновременном невыполнении условия (7) и выполнении условия (11) и формирование оценок дальности  и скорости
и скорости  в соответствии с процедурой (1)-(6) на основе измерения только дальности Y(k+1)=[Д(k+1)] и динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1).
в соответствии с процедурой (1)-(6) на основе измерения только дальности Y(k+1)=[Д(k+1)] и динамической модели радиальных функционально-связанных координат (8), представляемой в процедуре (1)-(6) матрицами Ф(k+1) и Q(k+1).
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение всех новых признаков позволит идентифицировать воздействие совместно или раздельно уводящих по дальности и скорости помех с одновременным формированием достоверных оценок дальности до воздушной цели и скорости сближения носителя РЛС с нею.
На фигуре приведена блок-схема, поясняющая предлагаемый способ сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящих по скорости и дальности помех.
Способ сопровождения ВЦ из класса «самолет с ТРД» » при воздействии уводящих по скорости и дальности помех осуществляется следующим образом (фигура).
На вход блока 1 БПФ на промежуточной частоте с выхода приемника РЛС поступает сигнал S(t), отраженный от ВЦ, который подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся частей КНД ее силовой установки. В формирователе 2 наблюдения, во-первых, определяется отсчет доплеровской частоты Fn(k+1), соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ, во-вторых, данный отсчет доплеровской частоты Fn(k+1) преобразуется в значение скорости, как V(k+1)=λFn(k+1)/2 (где λ - рабочая длина волны РЛС), в-третьих, поступающее на вход измерение дальности в непрерывном времени Д(t) преобразуется в дискретные отсчеты дальности Д(k+1), в-четвертых, определяется отсчет доплеровской частоты Fк(k+1), соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ. В результате на выходах формирователя 2 наблюдения формируются наблюдения (измерения) значений Д(k+1), V(k+1) и Fк(k+1). Причем, дискретные измерения Д(k+1) и V(k+1) поступают на соответствующие входы оптимального фильтра 4 (ОФД,V), работающего в соответствии с процедурой многомерной линейной дискретной калмановской фильтрации (1)-(6), априорные сведения в котором представлены в виде динамической модели (8). С выхода оптимального фильтра 4 (ОФД,V) оценки дальности  и скорости
и скорости  поступают на соответствующие входы формирователя оценок 9 и анализатора 5. Кроме того, дискретные отсчеты скорости V(k+1) поступают на вход оптимального фильтра 6 (ОФV), работающего также в соответствии с процедурой многомерной линейной дискретной калмановской фильтрации (1)-(6), априорные сведения в котором представлены в виде динамической модели (10), с выхода которого оценка скорости
поступают на соответствующие входы формирователя оценок 9 и анализатора 5. Кроме того, дискретные отсчеты скорости V(k+1) поступают на вход оптимального фильтра 6 (ОФV), работающего также в соответствии с процедурой многомерной линейной дискретной калмановской фильтрации (1)-(6), априорные сведения в котором представлены в виде динамической модели (10), с выхода которого оценка скорости  также поступает на соответствующие входы формирователя 9 оценок и анализатора 5, а ее интегрированное значение с выхода интегратора 8 в виде оценки дальности
также поступает на соответствующие входы формирователя 9 оценок и анализатора 5, а ее интегрированное значение с выхода интегратора 8 в виде оценки дальности  также поступает на соответствующий вход формирователя 9 оценок.
также поступает на соответствующий вход формирователя 9 оценок.
Одновременно отсчеты доплеровских частот Fк(k+1) с выхода формирователя 2 наблюдения поступают на вход оптимального фильтра 3 (ОФк) сопровождения первой компрессорной составляющей спектра сигнала, работающего аналогично, как и оптимальный фильтр 6 (ОФV) в соответствии с процедурой многомерной линейной дискретной калмановской фильтрации (1)-(6) и динамической моделью, аналогичной выражениям (10), за исключением того, что радиальные функционально-связанные флюктуационные составляющие модели и ее параметры соответствуют взаимному перемещению не планера ВЦ и носителя РЛС, а лопаток рабочего колеса первой ступени КНД силовой установки ВЦ и носителя РЛС. Кроме того, величина V00 будет соответствовать постоянному значению доплеровской частоты (скорости), отличной от планерной составляющей доплеровской частоты (скорости) на величину разноса доплеровских частот (скоростей), обусловленных отражениями сигнала от планера ВЦ и первой ступени КНД ее силовой установки. Сформированная на выходе оптимального фильтра 3 оценка  поступает на соответствующий вход анализатора 5.
поступает на соответствующий вход анализатора 5.
В вычислителе 7 на основе динамической модели радиальных функционально-связанных координат (без учета измеренных значений дальности и скорости) вычисляются оценки дальности  и скорости
и скорости  , которые подаются на соответствующие входы формирователя 9 оценок, а оценка дальности
, которые подаются на соответствующие входы формирователя 9 оценок, а оценка дальности  дополнительно поступает на соответствующий вход анализатора 5.
дополнительно поступает на соответствующий вход анализатора 5.
В анализаторе 5, во-первых, вычисляется модуль производной оценки разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  (преобразованное в анализаторе 5 значение оценки скорости в доплеровскую частоту, как
(преобразованное в анализаторе 5 значение оценки скорости в доплеровскую частоту, как  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки воздушной цели, которая сравнивается с пороговым значением ε, близким к нулю (формула (7), во-вторых, вычисляется модуль разности между оценкой производной дальности
КНД силовой установки воздушной цели, которая сравнивается с пороговым значением ε, близким к нулю (формула (7), во-вторых, вычисляется модуль разности между оценкой производной дальности  и оценкой скорости
и оценкой скорости  , величина которого сравнивается с порогом ε1 (формула (9), в-третьих, вычисляется модуль разности между оценкой дальности
, величина которого сравнивается с порогом ε1 (формула (9), в-третьих, вычисляется модуль разности между оценкой дальности  и вычисленной дальностью
и вычисленной дальностью  на основе динамической модели радиальных функционально-связанных координат (8), величина которого сравнивается с порогом ε2 (формула (11).
на основе динамической модели радиальных функционально-связанных координат (8), величина которого сравнивается с порогом ε2 (формула (11).
В анализаторе 5 осуществляется анализ выполнения условий (7), (9) и (11). В результате анализа на его выходах формируются следующие команды.
При одновременном выполнении условий (7) и (9), что свидетельствует об отсутствии уводящих по скорости и дальности помех, на вход формирователя 2 наблюдения с выхода анализатора 5 поступает команда, в результате выполнения которой на его выходе формируется наблюдение вида Y(k+1)=[Д(k+1), V(k+1)]T, в этом случае оценки дальности  и скорости
и скорости  с выхода оптимального фильтра 4 (ОФД,V) через формирователь 9 оценок по соответствующей команде с выхода анализатора 5 поступают на выход канала сопровождения ВЦ в РЛС.
с выхода оптимального фильтра 4 (ОФД,V) через формирователь 9 оценок по соответствующей команде с выхода анализатора 5 поступают на выход канала сопровождения ВЦ в РЛС.
При одновременном выполнении условия (7) и невыполнении условия (9), что свидетельствует о воздействии только уводящей по дальности помехи, на вход формирователя 2 наблюдения с выхода анализатора 5 поступает команда, в результате выполнения которой на его выходе формируется наблюдение вида Y(k+1)=[V(k+1)], в этом случае оценки скорости  с выхода оптимального фильтра 6 (ОФV) и дальности
с выхода оптимального фильтра 6 (ОФV) и дальности  , полученная путем интегрирования оценки скорости в интеграторе 8, через формирователь 9 оценок по соответствующей команде с выхода анализатора 5 поступают на выход канала сопровождения ВЦ в РЛС.
, полученная путем интегрирования оценки скорости в интеграторе 8, через формирователь 9 оценок по соответствующей команде с выхода анализатора 5 поступают на выход канала сопровождения ВЦ в РЛС.
При одновременном невыполнении условия (7) и выполнении условия (9), что свидетельствует о воздействии уводящих по дальности и скорости помех с функционально-связанным законом увода, на вход формирователя 2 наблюдения с выхода анализатора 5 поступает команда, в результате выполнения которой на его выходе будет отсутствовать какое-либо наблюдение, т.е. Y(k+1)=0, в этом случае оценки дальности  и скорости
и скорости  с выхода вычислителя 7 через формирователь 9 оценок по соответствующей команде с выхода анализатора 5 поступают на выход канала сопровождения ВЦ в РЛС.
с выхода вычислителя 7 через формирователь 9 оценок по соответствующей команде с выхода анализатора 5 поступают на выход канала сопровождения ВЦ в РЛС.
Аналогично, при одновременном невыполнении условий (7) и (10), что свидетельствует о воздействии уводящих по дальности и скорости помех без функционально-связанного закона увода, на вход формирователя 2 наблюдения с выхода анализатора 5 поступает команда, в результате выполнения которой на его выходе будет также отсутствовать какое-либо наблюдение, т.е. Y(k+1)=0 и оценки дальности  и скорости
и скорости  с выхода вычислителя 7 через формирователь 9 оценок по соответствующей команде с выхода анализатора 5 будут поступают на выход канала сопровождения ВЦ в РЛС.
с выхода вычислителя 7 через формирователь 9 оценок по соответствующей команде с выхода анализатора 5 будут поступают на выход канала сопровождения ВЦ в РЛС.
При одновременном невыполнении условия (7) и выполнении условия (11), что свидетельствует о воздействии только уводящей по скорости помехи, на вход формирователя 2 наблюдения с выхода анализатора 5 поступает команда, в результате выполнения которой на его выходе формируется наблюдение вида Y(k+1)=[Д(k+1)], в этом случае оценки дальности  и скорости
и скорости  с выхода оптимального фильтра 4 (ОФД,V) через формирователь 9 оценок по соответствующей команде с выхода анализатора 5 поступают на выход канала сопровождения ВЦ в РЛС.
с выхода оптимального фильтра 4 (ОФД,V) через формирователь 9 оценок по соответствующей команде с выхода анализатора 5 поступают на выход канала сопровождения ВЦ в РЛС.
Таким образом, применение предлагаемого изобретения позволит на основе идентификации воздействия или отсутствия совместного или раздельного воздействия уводящих по дальности и скорости помех повысить достоверность оценок радиальных функционально-связанных дальности до воздушной цели и скорости сближения носителя РЛС с нею.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Казаринов Ю.М., Соколов А.И., Юрченко Ю.С. Проектирование устройств фильтрации радиосигналов. - Л.: изд. Ленинградского университета, 1985, страницы 150, 151 (аналог).
2. Богданов А.В., Закомолдин Д.В., Новичёнок И.А. Способ сопровождения воздушной цели из класса «Самолет с турбореактивным двигателем» при воздействии уводящей по скорости помехи. Патент на изобретение №2575383, 2016 (прототип).









Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при воздействии по основному лепестку диаграммы направленности антенны помехи типа drfm
Способ сопровождения вертолета в импульсно-доплеровской радиолокационной станции
Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций при групповых действиях истребителей
Способ сопровождения воздушной цели при воздействии сигналоподобной с модуляцией доплеровской частоты помехи типа drfm
Способ обеспечения электромагнитной совместимости импульсно-доплеровских бортовых радиолокационных станций группы истребителей
Способ функционирования комплексов средств автоматизации систем обработки информации и управления и устройство, его реализующее
Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех
Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций группы истребителей при обеспечении их электромагнитной совместимости в условиях воздействия помех
Способ функционирования радиолокационной системы при измерении скорости полёта беспилотного летательного аппарата малого класса типа мультикоптер и дальности до него
Способ изготовления матриксов на основе низкотемпературных модификаций фосфатов кальция для костной инженерии
Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции
Способ распознавания варианта наведения подвижного объекта на один из летательных аппаратов группы
Биорезорбируемая барьерная мембрана на основе полисахарида для направленной регенерации костной ткани
Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Беспилотный летательный аппарат вертикального взлета и посадки
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции с распознаванием постановщиков помех типа drfm при обнаружении группы самолётов
Способ определения мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала
Способ получения индивидуального композиционного имплантата на основе альгината натрия и фосфатов кальция для замещения костно-хрящевых дефектов методом трехмерной гелевой печати

