Результат интеллектуальной деятельности: Беспилотный летательный аппарат вертикального взлета и посадки
Вид РИД
Изобретение
Область техники
Изобретение относится к области летательных аппаратов, в частности, к беспилотным летательным аппаратам (далее БЛА) вертикального взлета и посадки.
Предшествующий уровень техники
Известны различные конструкции летательных аппаратов (далее ЛА), обеспечивающие возможность функционирования ЛА в режиме вертикального взлета и посадки.
Известны самолеты вертикального взлета и посадки (далее СВВП), использующие для вертикального взлета дополнительные подъемные двигатели или двигатели с изменяемым вектором тяги. Это дорого, технически очень сложно и имеет невысокую надежность.
Известно техническое решение винтомоторного самолета с использованием поворотных двигателей с подъемными винтами с изменяемым шагом (US, 2011036955, А1). Такой самолет дополнительно усложнен сложной системой поворота лопастей.
Например, известен СВВП V-22 «Osprey» (https://militaryarms.ru/vertolety/bell-v-22-osprey), выполненный по близкой к указанной выше схеме (US, 2011036955, А1), который является конвертопланом, имеет два двигателя, которые могут менять вектор тяги с горизонтального на вертикальный, может взлетать и садиться вертикально, как вертолет, но при этом он способен к длительному горизонтальному полету на высокой скорости, как самолет. «Osprey» выполнен по нормальной аэродинамической схеме, это - высокоплан с двумя газотурбинными двигателями (ГТД) и двухкилевым хвостовым оперением. Фюзеляж конвертоплана - полумонококового типа, с прямоугольным сечением. Боковые обтекатели фюзеляжа служат для уборки основных стоек шасси, размещения дополнительных топливных баков и некоторых систем оборудования конвертоплана. Крыло конвертоплана - кессонного типа с двумя лонжеронами, оно имеет небольшой угол обратной стреловидности. Механизация крыла конвертоплана состоит из четырех элеронов. Крыло расположено на круговой опоре, что позволяет поворачивать его и размещать вдоль фюзеляжа для уменьшения габаритов ЛА. Силовая установка конвертоплана состоит из двух двигателей Rolls-Royce АЕ 1107С, расположенных в поворотных мотогондолах на концах крыла. Двигатели соединяются друг с другом через крыло, что позволяет в случае отказа одного из них совершить управляемое снижение. Винты имеют по три трапециевидных лопасти. Во время вертикального полета управление происходит за счет изменения шага винтов и тяги двигателя. После достижения аппаратом скорости 180-200 км/ч подъемная сила уже обеспечивается аэродинамическими поверхностями, и мотогондолы переводятся в горизонтальное положение.
Однако балансировка такого СВВП на режиме висения является сложной задачей, требующей применения высокоточных приводов и обеспечения жесткой синхронизации поворотных двигателей. Использование только двух винтомоторных групп требует очень сложной работы автопилота для обеспечения его балансировки как на режиме висения, так и на переходных режимах от висения к полету по маршруту с использованием подъемной силы крыльев. Из-за наличия сложных механизмов поворота тяжелых мотогондол и крыльев такое решение технически очень сложно, имеет невысокую надежность и высокую стоимость.
Известно непилотируемое воздушное средство с использованием одних и тех же двигателей для взлета, посадки и полета по маршруту (US, 2011042508, А1). Средство приспособлено для взлета с крыльями, установленными в вертикальном положении, в отличие от их положения в горизонтальном полете, в котором они горизонтальны. Указанное воздушное средство содержит:
- три или более элемента, производящие тягу, дифференцированно размещенные в отношении к направлению тяги указанных элементов, когда указанный фюзеляж находится в вертикальном или горизонтальном положении при полете;
- одно или более крыльев, например, два крыла по схеме биплана, с размещенными на концах каждого из указанных крыльев двумя элементами, продуцирующими тягу;
- систему контроля полета, адаптированную к управлению положением указанного воздушного средства, когда взлет вертикален, путем варьирования тяги трех или более элементов создания тяги, и адаптированную для контроля положения средства в горизонтальном полете путем варьирования тяги трех или более элементов, производящих тягу. При этом указанные три или более элементов, продуцирующих тягу, установлены фиксированными, не вращающимися относительно указанных одних или более крыльев, и воздушное средство приспособлено для вертикального взлета с выступающими ребрами крыльев, направленными вверх.
Однако использование только двух винтомоторных групп требует очень сложной работы автопилота для обеспечения его балансировки как на режиме висения, так и на переходных режимах от висения к горизонтальному полету, не гарантирует безопасности переходных режимов функционирования.
Известно техническое решение беспилотного летательного аппарата с вертикальным взлетом и посадкой (US, 7874513, В1), содержащего фюзеляж со стабилизатором в его задней части и с двумя неподвижными крыльями, в котором использованы четыре вентилятора, при этом:
- первые вентиляторы, управляемые первым двухтактным двигателем приводного вала, размещенным в передней части фюзеляжа, установлены на двух концах первого крыла и приспособленные для их поворота в крыле вперед при крейсерском полете, вверх при вертикальном взлете и назад и вверх при вертикальной посадке;
- второе крыло размещено за первым крылом и содержит элементы управления, включающие закрылки, передние кромки и элероны;
- вторые вентиляторы, управляемые вторым двухтактным двигателем приводного вала, размещенным в задней части фюзеляжа, установлены с двух сторон фюзеляжа в его задней части.
Однако указанное выше воздушное средство имеет очень высокое лобовое сопротивление, сложно в исполнении и управлении из-за наличия в нем большого количества механических узлов с необходимостью их синхронного взаимодействия, больших затрат топлива при низком уровне надежности, что значительно усложняет задачу его применения.
Известно воздушное средство с мультиконфигурируемыми винтокрылыми роторами (US, 9257581, В2), приспособленное для вертикального взлета и горизонтального полета, содержащее: фюзеляж; три или более элемента, производящие тягу и отдельно размещенные для создания тяги в трех направлениях, пока фюзеляж в вертикальном полете; одну или более пар крыльев, и систему контроля полета, адаптированную для управления положением указанного воздушного средства в течение вертикального взлета путем изменения тяги трех или более элементов тяги. При этом указанные одна или более пар крыльев содержат: первое левое крыло, содержащее первый левый винтокрылый ротор винтомоторной группы; первое правое крыло, содержащее первый правый винтокрылый ротор винтомоторной группы; указанные винтокрылые роторы питаются от электродвигателей, установленных в концевых обтекателях указанных крыльев; указанные электродвигатели содержат ротор и статор, и каждый винтокрылый ротор винтомоторной группы содержит первую лопасть и вторую лопасть; указанный первый левый винтокрылый ротор винтомоторной группы и указанный первый правый винтокрылый ротор винтомоторной группы приспособлены для разворачивания от конфигурации в горизонтальном полете, в котором указанные роторы винтомоторных групп составляют тандем в крыльях, до конфигурации при вертикальном взлете, в котором указанные роторы винтомоторные группы конфигурированы как двухлопастные пропеллеры, и указанные первая и вторая лопасть имеют ребра вверх в течение вертикального полета и каждое ребро указанных лопастей развернуто вперед при крейсерском полете, роторы указанных электродвигателей вращаются вокруг указанного статора этих двигателей вокруг первой оси, указанная лопасть разворачивается от указанного положения крейсерского полета до конфигурации вертикального взлета путем поворота вокруг второй оси внутри ротора. При этом статоры указанных электродвигателей закреплены на указанных крыльях, и роторы указанных электродвигателей закреплены на указанных винтокрылых роторах.
При этом вторая лопасть разворачивается от ее положения в крейсерском полете к положению при вертикальном взлете путем поворота вокруг третьей оси в роторе. При этом средство дополнительно содержит: вертикальный стабилизатор, закрепленный на указанном фюзеляже; двигатель, закрепленный на вертикальном стабилизаторе, причем указанный двигатель приспособлен для поворота из первой наружной конфигурации, обеспечивающей подъемную силу тяги, во вторую наружную конфигурацию, обеспечивающую тягу вниз. При этом указанные статоры электромоторов соединены с указанными крыльями с помощью составных соединений для вращения указанных электродвигателей вокруг оси тангажа указанного средства.
Однако описанное средство (US, 9257581, В2) сложно в исполнении и управлении из-за наличия в нем большого количества механических узлов с необходимостью их синхронного взаимодействия, что значительно усложняет задачу его применения.
Длительность полета такого воздушного средства определяется емкостью бортовых аккумуляторных батарей.
После изменения положения лопастей винтокрылых роторов и даже при ориентации их по потоку при положительных углах атаки воздушного средства на них будут возникать кабрирующие моменты, пропорциональные квадрату путевой скорости и углу атаки, и на определенных скоростях полета потребуется определенная эффективность рулей высоты для компенсации этого момента.
Кроме того, три винтомоторные группы плохо поддаются балансировке в канале рыскания при управлении и стабилизации пространственного положения оборотами винтомоторных групп, особенно на переходных режимах, при запуске таких пропеллеров возникают большие моменты и тряска, с которой могут не справиться органы управления.
Известен беспилотный квадрокоптер (US, D798961, S), содержащий фюзеляж с закрепленными на нем на концах консолей, образующих крестообразную конструкцию, четырьмя винтомоторными группами, размещенными в консолях в вертикальном положении и имеющих наружные двухлопастные винты. В связи с тем, что у такого квадрокоптера нет крыльев и он летит только за счет подъемной сила винтов, резко снижается время полета в сравнении с самолетом при одинаковом потреблении топлива
Известен беспилотный летательный аппарат UAV JUMP-20, совмещающий конструкции самолета и квадрокоптера и запускаемый с катапульты (http://zonwar.ru/news4/news_715_Jump-20.html), по схеме реализации подъемных сил близкий к настоящему изобретению. На его неподвижных крыльях расположены две дополнительные балки, каждая с двумя подъемными винтомоторными группами (далее ВМГ), содержащими электромоторы и винты с двумя наружными лопастями, с помощью которых он может вертикально взлетать и садиться. Аппарат оснащен маршевым бензиновым двигателем, установленным в передней части фюзеляжа, способным разгонять его до 133 км/ч. Система Jump имеет минимальное поперечное сечение для снижения лобового сопротивления. Для управления системой Jump требуется дополнительное программное обеспечение, которое обеспечивает переход между вертикальным и горизонтальным полетом.
После вертикального взлета подъемные винты постепенно останавливаются, а в действие приводится маршевая винтомоторная группа, которая обеспечивает полет по маршруту с использованием подъемной силы крыла. Длительность полета такого воздушного средства определяется емкостью бортовых аккумуляторных батарей.
К недостаткам такой схемы можно отнести наличие неудобообтекаемых балок крепления подъемных винтомоторных групп, самих моторов и винтов. При маленьких размерах (при размахе до 2 м и взлетном весе до 10 кг) и относительно небольших полетных скоростях (до 80-100 км/ч) это не вносит в полет больших возмущений. Но при взлетном весе более 300 кг потребуются подъемные винты большого диаметра (около 2,5 м), которые в режиме горизонтального полета будут приводить к появлению больших знакопеременных сил на вращающихся винтах: тряске с частотой вращения винта и амплитудой, пропорциональной квадрату путевой скорости БЛА, что может привести к разрушению либо винта, либо конструкции самого БЛА.
После остановки подъемных винтов и даже при ориентации их вдоль по потоку при положительных углах атаки на них будут возникать кабрирующие моменты, пропорциональные квадрату путевой скорости и углу атаки. Так как подъемных винтов минимум четыре, то на определенных скоростях полета может не хватить эффективности руля высоты для компенсации этих моментов.
Раскрытие сущности изобретения
Целью настоящего изобретения являлось создание БЛА, содержащего минимум подвижных механических узлов при обеспечении его вертикального взлета и посадки с наименьшими затратами мощности при достаточной надежности и безопасности.
При создании изобретения была поставлена техническая задача достижения простоты конструкции, обеспечивающей наименьшее лобовое сопротивление и возможность управления БЛА в режиме вертикального взлета и посадки и в других режимах полета с помощью управления положением аэродинамических средств управления обтеканием неподвижных крыльев при расположении элементов, создающих подъемную силу, симметричном относительно центра масс БЛА и изменения режима работы двигателей без изменения их положения в составе БЛА. Ожидаемым техническим эффектом являлось упрощение конструкции БЛА, снижение веса и стоимости, повышение надежности.
Раскрытие сущности изобретения
Поставленная задача была решена созданием беспилотного летательного аппарата, содержащего фюзеляж, выполненный в форме обтекаемой гондолы с крыльями, несущими подъемные винтомоторные группы, содержащие электромоторы и винты с наружными лопастями, стабилизатор, маршевую винтомоторную группу, отличающегося тем, что:
- аппарат выполнен по аэродинамической схеме «тандем» и содержит:
- переднее и заднее крылья, имеющие правые и левые консоли, размещенные на фюзеляже со смещением заднего крыла по высоте вверх и назад относительно переднего крыла, с углом установки заднего крыла по тангажу больше угла установки переднего крыла по тангажу, при этом:
- каждая из указанных консолей в концевой части снабжена органами аэродинамического управления, включающими элероны и рули высоты, расположенные в зоне обдува указанных консолей и выполненные с возможностью их зависания при отклонении вниз на 90 град.;
- каждая из указанных консолей снабжена концевыми обтекателями крыла, отогнутыми вниз перпендикулярно плоскости крыла, в которых размещены неподвижные стойки шасси, имеющие длину, достаточную для размещения аппарата на местности в приподнятом горизонтальном положении;
- систему электронного управления положением указанных органов аэродинамического управления от автопилота;
- по меньшей мере, четыре подъемные винтомоторные группы, размещенные на концах указанных правой и левой консолей переднего и заднего крыльев, содержащие бесколлекторные электромоторы, снабженные электронными контроллерами управления и частично утопленные в консоли, и верхние наружные винты на выступающих частях электромоторов, закрытых указанными концевыми обтекателями крыльев;
- маршевую винтомоторную группу, выполненную толкающей с размещением ее в конце задней части фюзеляжа и снабженную гиростабилизированной оптико-электронной системой, размещенной в носовой части указанной маршевой винтомоторной группы и содержащую бесколлекторный электромотор, снабженный электронными контроллерами управления, и наружный многолопастной винт;
- стабилизатор с вертикальным V-образным оперением;
- гибридную силовую установку, включающую двигатель внутреннего сгорания с генератором, электрически связанным с указанными электромоторами указанных винтомоторных групп;
- буферную аккумуляторную батарею;
- систему электронного управления режимами работы электромоторов подъемных и маршевой винтомоторных групп от автопилота, обеспечивающую возможность балансировки аппарата на режиме висения с помощью изменения скорости вращения указанных однолопастных винтов постоянного шага подъемных винтомоторных групп и возможность перевода аппарата из режима вертикального взлета в режим полета по маршруту и затем в режим вертикальной посадки путем, соответственно, отключения указанных подъемных винтомоторных групп с одновременным включением маршевой винтомоторной группы и затем включения указанных подъемных винтомоторных групп с одновременным отключением маршевой винтомоторной группы,
при этом:
- указанные консоли переднего и заднего крыльев выполнены с обратной стреловидностью, обеспечивающей в режиме вертикального взлета и посадки положение центра масс в точке приложения суммарной подъемной силы от всех указанных винтомоторных групп, а при полете по маршруту обеспечивающей положение центра масс впереди точки приложения суммарной подъемной силы от крыльев и фюзеляжа по направлению полета на 5-15% от длины средней аэродинамической хорды крыльев;
- указанные подъемные винтомоторные группы снабжены наружными однолопастными винтами постоянного шага, профилированными по их длине и закрепленными на валах электромоторов с помощью горизонтальных шарниров с возможностью самоориентирования указанных лопастей по набегающему потоку при отключении электромотора после перехода аппарата из режима вертикального взлета в режим висения или полета на марше.
При этом согласно изобретению целесообразно в указанных подъемных и маршевых винтомоторных группах использовать бесколлекторные электромоторы, одинаковые по мощности и конструкции, а указанные консоли крыльев выполнять одинаковыми и съемными.
Кроме того, согласно изобретению целесообразно использовать буферную аккумуляторную батарею, обеспечивающую электропитание аппарата, достаточное для снижения и посадки аппарата в случае отказа гибридной силовой установки, например, в течении 10 мин.
При этом согласно изобретению целесообразно полезную нагрузку размещать в легкосъемных, не выступающих за обводы фюзеляжа отсеках, расположенных вблизи центра масс БЛА.
Краткое описание чертежей
В дальнейшем изобретение поясняется примерами осуществления беспилотного летательного аппарата согласно изобретению и прилагаемыми чертежами, на которых:
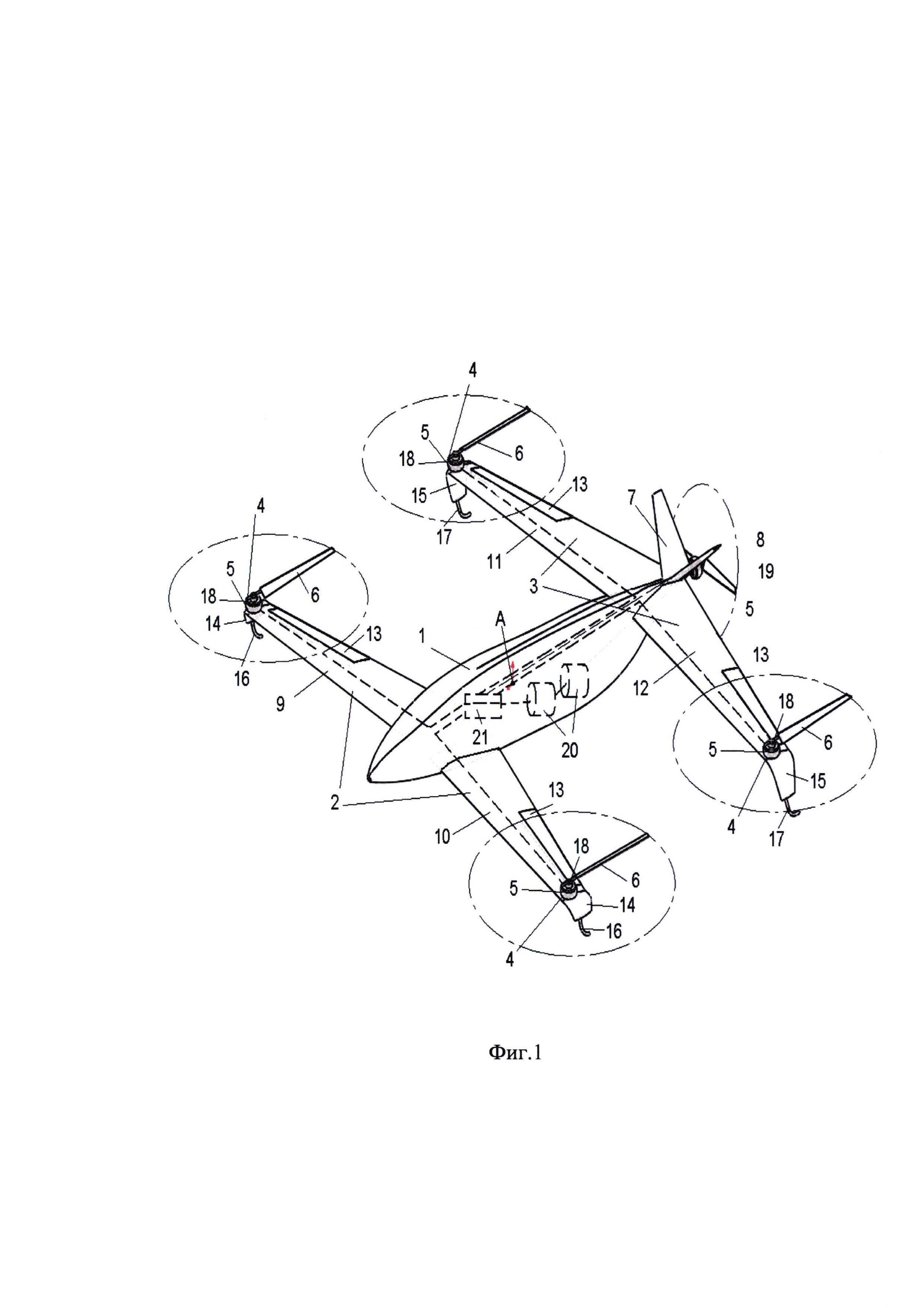
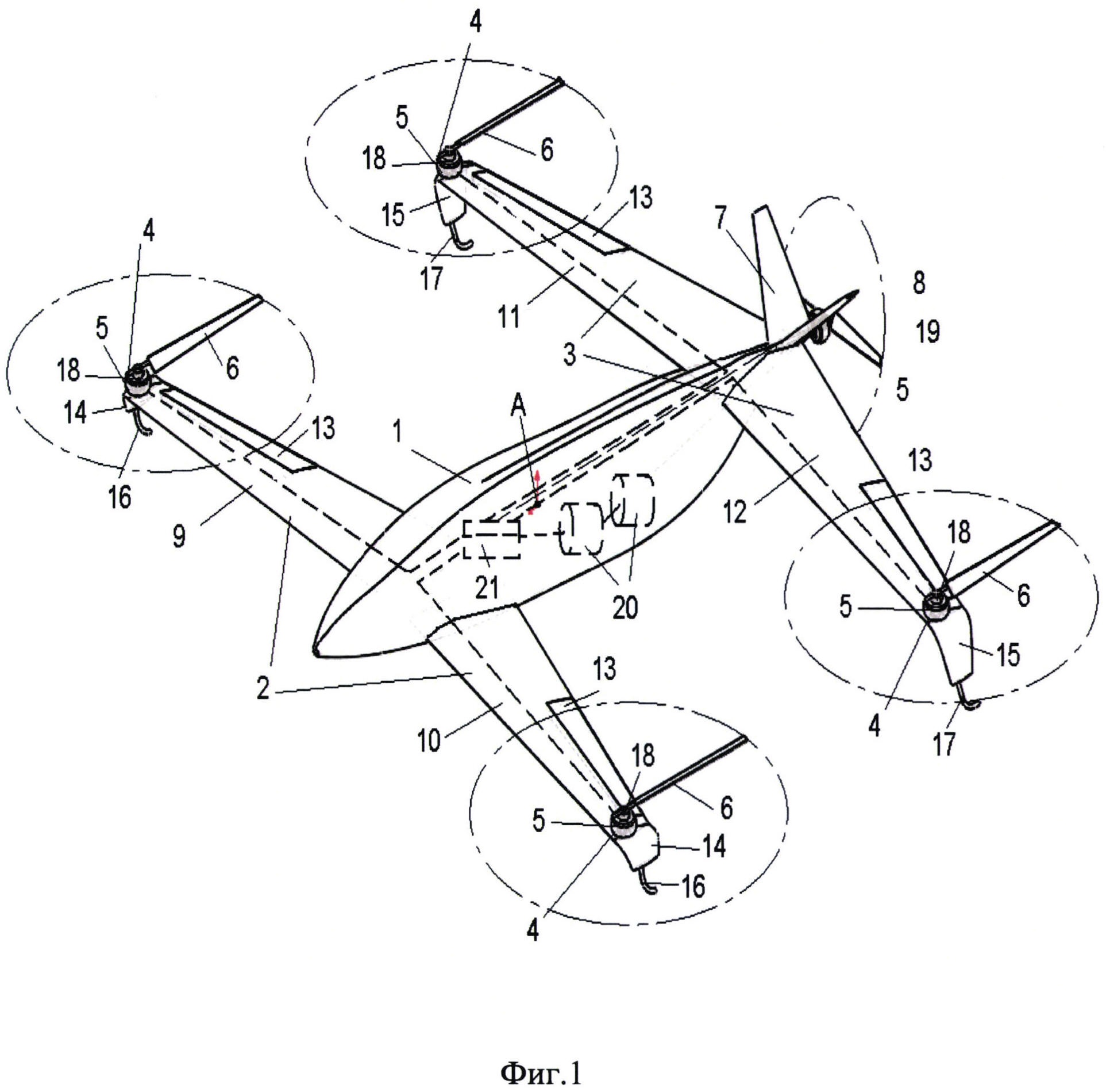
Фиг. 1 - БЛА согласно изобретению, схематично, вид в изометрии;
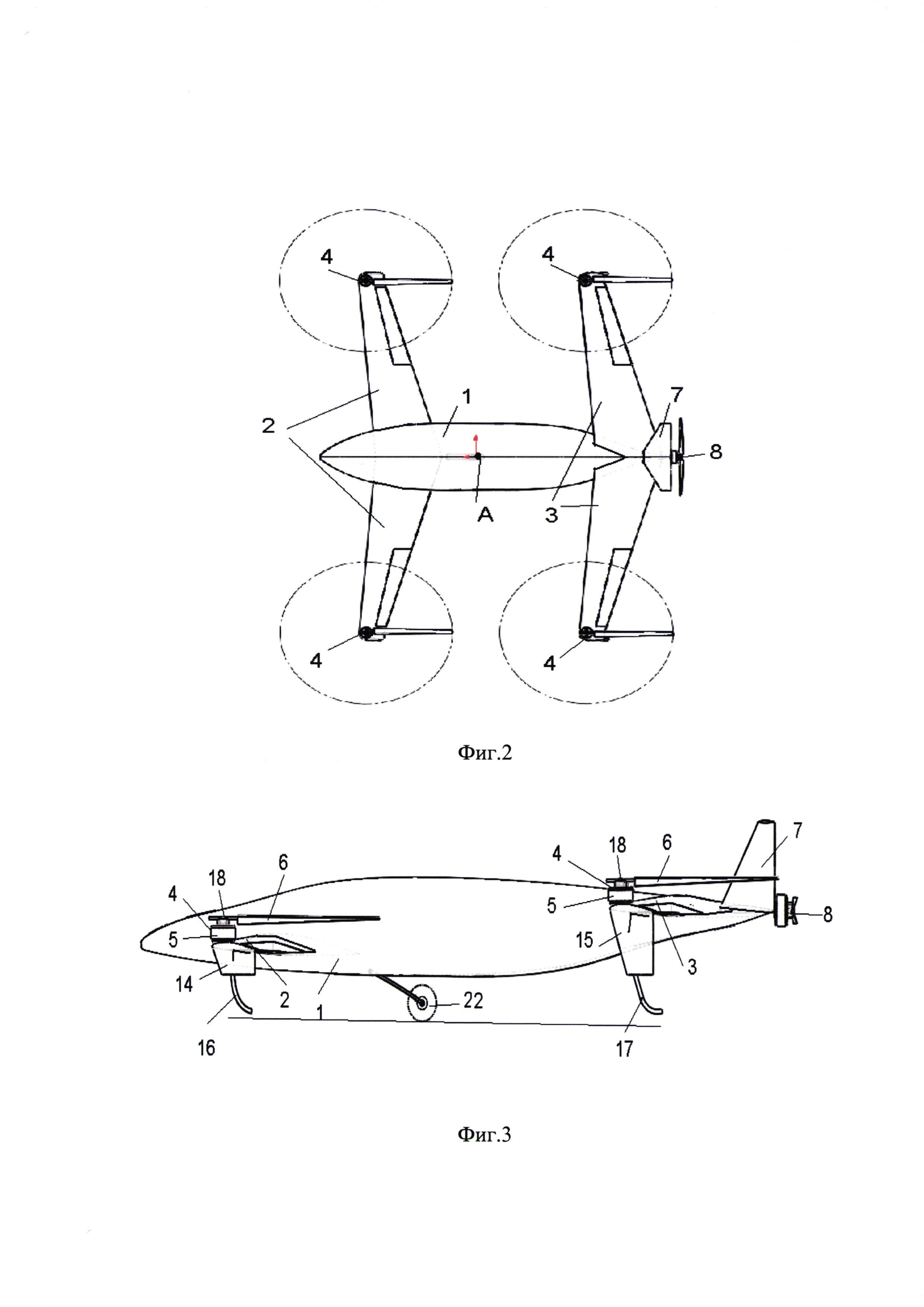
Фиг. 2 - БЛА согласно изобретению, схематично, вид сверху;
Фиг. 3 - БЛА согласно изобретению, схематично, вид сбоку;
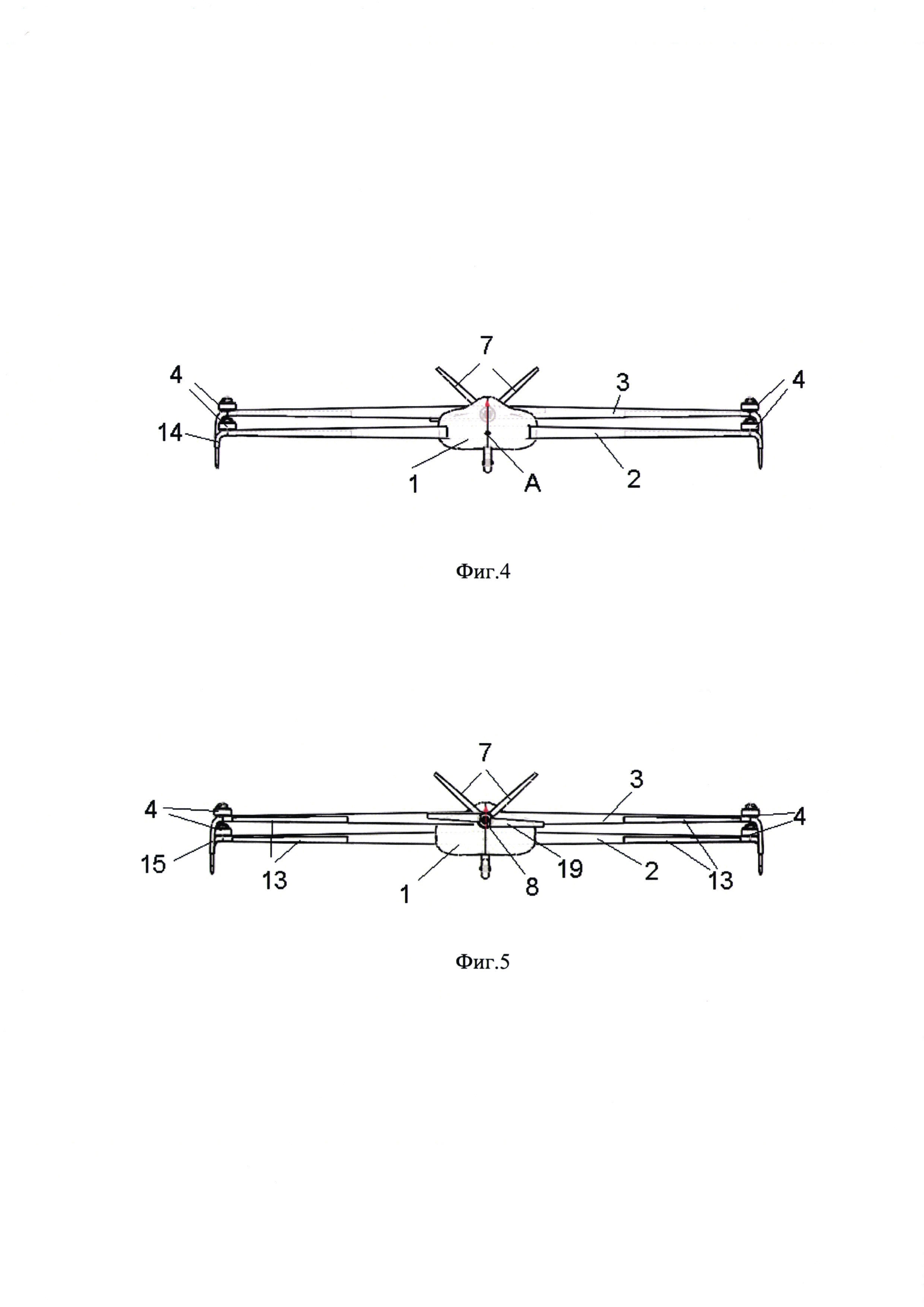
Фиг. 4 - БЛА согласно изобретению, схематично, вид спереди;
Фиг. 5 - БЛА согласно изобретению, схематично, вид сзади.
При этом приведенные примеры осуществления БЛА согласно изобретению не являются исчерпывающими, не выходят за рамки формулы изобретения и не ограничивают возможности реализации изобретения.
Осуществление изобретения
На Фиг. 1-5 показаны примеры осуществления БЛА согласно изобретению, выполненных по аэродинамической схеме «тандем» и содержащих фюзеляж 1, выполненный в форме обтекаемой гондолы с передним 2 и задним 3 крыльями, которые несут, по меньшей мере, четыре подъемные винтомоторные группы 4, содержащие электромоторы 5 и винты 6 с наружными лопастями, стабилизатор 7 и маршевую винтомоторную группу 8.
При этом, согласно изобретению, переднее крыло 2 имеет правую 9 и левую 10 консоли, а заднее крыло 3 имеет правую 11 и левую 12 консоли, размещенные на фюзеляже 1 со смещением заднего крыла 3 по высоте вверх и назад относительно переднего крыла 2, с углом установки заднего крыла 3 по тангажу больше угла установки переднего крыла 2 по тангажу (Фиг. 1, 3), что обеспечивает снижение вредного влияния спутного следа от переднего крыла 2 на заднее крыло 3.
Согласно изобретению, указанные консоли 9, 10, 11, 12 переднего 2 и заднего 3 крыльев выполнены с обратной стреловидностью, обеспечивающей в режиме вертикального взлета и посадки положение центра А масс в точке приложения суммарной подъемной силы от всех указанных подъемных винтомоторных групп 4, а при полете по маршруту обеспечивающей положение центра А масс впереди точки приложения суммарной подъемной силы от крыльев 2, 3 и фюзеляжа 1 по направлению полета на 5-15% от длины средней аэродинамической хорды крыльев 2 и 3 (Фиг. 1, 2), что обеспечивает совпадение потребного расположения центра масс БЛА на режиме висения и в режиме полета и, соответственно, обеспечивает запас статической устойчивости БЛА.
Каждая из указанных консолей 9, 10 переднего крыла 2 и каждая из указанных консолей 11, 12 заднего крыла 3 в своей концевой части снабжены органами 13 аэродинамического управления (Фиг. 1, 2), включающими элероны и рули высоты, расположенные в зоне обдува указанных консолей воздушными потоками и выполненные с возможностью их зависания при отклонении вниз на 90 град., что обеспечивает уменьшение вредного лобового сопротивления консолей крыльев минимум в два раза при их вертикальной обдувке на режиме вертикального взлета и посадки и приводит к увеличению КПД подъемных винтомоторных групп.
Кроме того, каждая из указанных консолей 9, 10 переднего крыла 2 и каждая из указанных консолей 11, 12 заднего крыла 3 снабжены, соответственно, концевыми обтекателями 14 и 15 крыльев 2 и 3, отогнутыми вниз перпендикулярно плоскости крыла 2 и 3 (Фиг. 1, 3, 4), в которых размещены, соответственно, неподвижные стойки 16 и 17 шасси, имеющие длину, достаточную для размещения аппарата на местности в приподнятом горизонтальном положении (Фиг. 3, 4).
Подъемные винтомоторные группы 4 содержат бесколлекторные электромоторы 5, снабженные электронными контроллерами управления и частично утопленные, соответственно, в консолях 9, 10 переднего крыла 2 и консолях 11, 12 заднего крыла 3, при этом выступающие вверх части электромоторов 5 закрыты указанными концевыми обтекателями 14 и 15 крыльев 2 и 3 (Фиг. 3), что позволяет уменьшить лобовое сопротивление БЛА.
Указанные подъемные винтомоторные группы 4 снабжены наружными однолопастными винтами 6 постоянного шага (Фиг. 1, 3), профилированными по их длине и закрепленными на валах электромоторов 5 с помощью горизонтальных шарниров 18 (Фиг. 1) с возможностью самоориентирования указанных лопастей винтов 6 по набегающему потоку при отключении электромоторов 5 после перехода аппарата из режима вертикального взлета в режим висения или полета на марше, что в значительной степени приводит также к снижению лобового сопротивления БЛА. Использование горизонтальных шарниров 18 позволяет лопастям самоориентироваться по потоку при изменении угла атаки БЛА, что снимает дополнительное лобовое сопротивление и кабрирующий момент и позволяет решить все проблемы предотвращения тряски подъемных винтомоторных групп 4 при их горизонтальном перемещении в полете и проблемы с продольной балансировкой БЛА при полете на марше.
Маршевая винтомоторная группа 8 выполнена толкающей с размещением ее в конце задней части фюзеляжа 1 и снабжена гиростабилизированной оптико-электронной системой (на чертежах не показана), размещенной в носовой части указанной маршевой винтомоторной группы 8 для предотвращения попадания маршевой группы 8 в зону видимости гиростабилизированной оптико-электронной системы.
Для снижения вредного лобового сопротивления от выступающей части гиростабилизированной оптико-электронной системы, а также для предотвращения ее повреждения в ходе взлета и посадки целесообразно выполнять ее убирающейся в фюзеляж 1. При этом потребная высота и масса стоек 16 и 17 шасси уменьшаются.
Маршевая винтомоторная группа 8 содержит бесколлекторный электромотор 5, снабженный электронными контроллерами управления (не показаны), и наружный многолопастной винт 19.
БЛА согласно изобретению содержит гибридную силовую установку 20 (Фиг. 1), включающую двигатель внутреннего сгорания с генератором, электрически связанным с указанными электромоторами 5 указанных винтомоторных групп 4 и 8.
При этом согласно изобретению целесообразно в качестве электромоторов 5 указанных подъемных 4 и маршевой 8 винтомоторных групп использовать бесколлекторные электромоторы 5, одинаковые по мощности и конструкции, а указанные консоли 9,10 крыла 2 и консоли 11,12 крыла 3, соответственно, выполнять одинаковыми и съемными, что обеспечивает максимальную унификацию конструкции БЛА и удешевление БЛА при серийном производстве и позволяет существенно уменьшить габариты БЛА при его транспортировке наземным транспортом.
БЛА согласно изобретению содержит стабилизатор 7 с вертикальным V-образным оперением (Фиг. 1-5), которое совместно с вертикальными концевыми обтекателями 14 и 15 крыльев 2 и 3 обеспечивает требуемую устойчивость БЛА в полете.
БЛА согласно изобретению содержит систему электронного управления положением указанных органов аэродинамического управления по командам от автопилота (не показана), которая может быть выполнена известным специалистам по авионике образом и, с учетом размещения указанных органов 13 аэродинамического управления в областях консолей, подвергающихся постоянному наиболее сильному воздействию воздушных масс, обеспечивает быстрое изменение положения элеронов и рулей высоты и необходимую маневренность БЛА.
БЛА согласно изобретению содержит буферную аккумуляторную батарею (на чертежах не показана), обеспечивающую в случае отказа гибридной силовой установки 20 электропитание БЛА, достаточное для его снижения и вертикальной посадки, например, в течение 10 мин.
БЛА согласно изобретению содержит также систему 21 электронного управления режимами работы электромоторов 5 (Фиг. 1) подъемных 4 и маршевой 8 винтомоторных групп от автопилота, обеспечивающую возможность балансировки БЛА на режиме висения с помощью изменения скорости вращения указанных однолопастных винтов 6 постоянного шага в подъемных винтомоторных группах 4 и возможность перевода БЛА из режима вертикального взлета в режим полета по маршруту и затем в режим вертикальной посадки путем, соответственно, отключения указанных электромоторов 5 подъемных винтомоторных групп 4 с одновременным включением электромотора 5 маршевой винтомоторной группы 8 и затем включения указанных подъемных винтомоторных групп 4 с регулированием скорости вращения однолопастных винтов 6 и с одновременным отключением маршевой винтомоторной группы 8.
БЛА может содержать датчик 22 касания, при касании которого с местностью автопилот может подавать команду на изменение режима работы электромоторов 5 подъемных винтомоторных групп 4 с уменьшением оборотов лопастей винтов 6.
С целью ускорения подготовки БЛА согласно изобретению к повторному вылету, а также для обеспечения легкости замены различных типов полезных нагрузок или перевозимых грузов целесообразно выполнять фюзеляж 1 с возможностью размещения на нем полезной нагрузки в легкосъемных, не выступающих за обводы фюзеляжа 1 отсеках, расположенных вблизи центра масс БЛА.
БЛА, выполненный описанным выше образом и размещенный на местности с опорой на стойки, подготавливали к вертикальному взлету путем проверки способности системы электронного управления положением указанных органов 13 аэродинамического управления по визуально различимому изменению их положения при включении автопилота, и проверки системы 21 электронного управления режимами работы электромоторов 5 по визуально различимому изменению положения лопастей винтов 6 по команде от автопилота.
При включении электромоторов 5 подъемных винтомоторных групп 4 винты 6 начинают вращаться, обеспечивая увеличение вертикальной подъемной силы под крыльями 2 и 3 и фюзеляжем 1. БЛА осуществляет вертикальный взлет. При достижении необходимой высоты зависания БЛА по команде автопилота постепенно выключаются электромоторы 5 подъемных винтомоторных групп 4 с уменьшением скорости вращения винтов 6, и одновременно включается электромотор 5 маршевой винтомоторной группы 8. БЛА из режима висения переходит в режим горизонтального полета. После перехода БЛА из режима висения в режим полета подъемные винтомоторные группы прекращают вращение лопастей винтов 6, лопасти, профилированные соответственно требуемым характеристикам БЛА, самоориентируются по потоку, уменьшая лобовое сопротивление БЛА.
Для изменения режима полета БЛА с полета по маршруту на вертикальную посадку по команде автопилота производятся аналогичные обратные изменения в системе электронного управления положением указанных органов 13 аэродинамического управления и в системе электронного управления режимами работы электромоторов 5, включаются электромоторы 5 подъемных винтомоторных групп 4 и постепенно растет подъемная сила под крыльями и фюзеляжем, обеспечивая висение БЛА над местом посадки. После касания стойками 16 и 17 шасси местности под фюзеляжем 1 постепенно уменьшается скорость вращения лопастей винтов 6, маршевая винтомоторная группа 8 отключается.
Таким образом, как показано выше, созданный согласно настоящему изобретению БЛА вертикального взлета и посадки характеризуется простотой конструкции, легкостью и удобством в управлении, в эксплуатации и транспортировании, малой стоимостью в сравнении с известными конструкциями БЛА вертикального взлета и посадки, возможностью использования известных технологических приемов и оборудования, что делает его привлекательным для промышленного производства и целевого использования.
Способ и бортовая система обеспечения минимумов дистанций продольного эшелонирования по условиям турбулентности вихревого следа
Способ и устройство для управления наземным движением мобильных объектов на аэродроме
Способ однозначного измерения дальности до метеорологического объекта
Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек - машина"
Радиолокационный способ и устройство для дистанционного измерения полного вектора скорости метеорологического объекта
Способ измерения скорости полёта воздушного объекта и рлс для его осуществления
Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех
Способ и устройство для управления движением на аэродроме
Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина"
Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех

